Ces hypothèses permettent d'exprimer les déplacements de chaque point de la section, en fonction des déplacements du point correspondant situé sur la ligne médiane, et en fonction de l'augmentation de déplacement due à la rotation de la section autour de la ligne médiane. axe transversal.. Dans le cas de poutres de droite, la ligne médiane est traditionnellement placée sur l'axe x de la base locale, les déplacements transversaux se produisent donc dans le plan y, z.
La traction-compression
Équation d’équilibre local
Dans chaque cas, ces équations sont dérivées en appliquant les équations de Lagrange, qui résultent du principe de Hamilton, ou en écrivant l'équilibre local d'un segment de poutre. On ne garde que les termes du premier ordre et on les substitue dans [éq 3.1.1-1], puis on utilise la loi de Hooke et l'hypothèse que la poutre est constituée de fibres longitudinales agissant uniquement en traction-compression à l'axial pour ne pas exprimer force par.
Méthode du Lagrangien
La torsion pure (torsion de Saint-Venant)
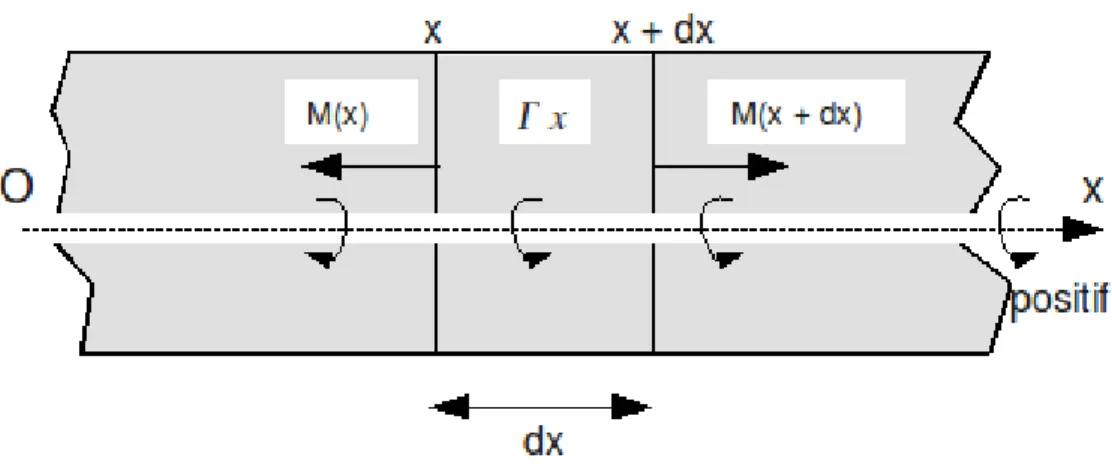
Équation d’équilibre local
- Poutre de section circulaire
- Poutre de section quelconque
Pour prendre en compte la déformation tout en restant dans l'hypothèse de torsion libre, dans le cas de sections non circulaires, on est amené à remplacer le moment Ip par une constante de rotation C. Lorsque le centre de gravité de la section n'est pas le centre de rotation, cette expression n’est pas valable et des mouvements de torsion et de flexion s’accompagnent.
Méthode du Lagrangien
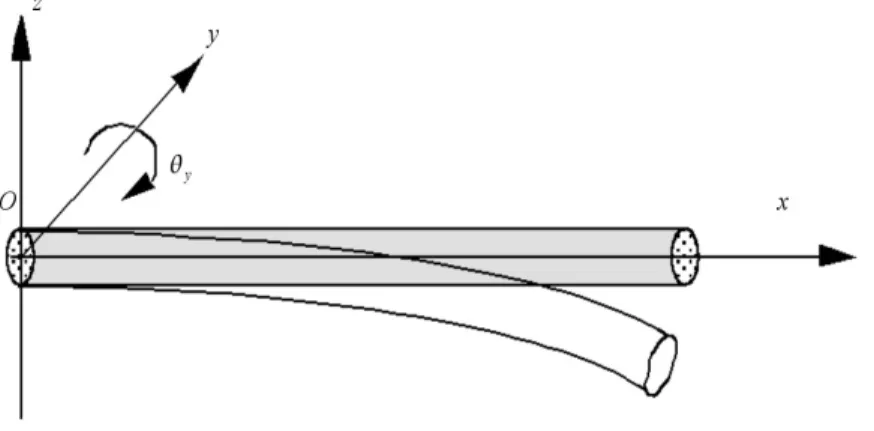
La flexion simple
Équation d’équilibre local
Le modèle de poutre de Timoshenko (POU_D_T) prend en compte tous ces termes, notamment ceux liés à l'effort tranchant. Le modèle de poutre d'Euler (POU_D_E) est une simplification, car les déformations par effort tranchant et l'inertie rotationnelle sont négligées (il n'intervient dans les études dynamiques que pour les modes élevés).
Méthode du Lagrangien
Les matrices de rigidité sont calculées avec l'option 'RIGI_MECA', et les matrices de masse avec l'option. MASS_MECA' pour la matrice cohérente, et l'option 'MASS_MECA_DIAG' pour la matrice de masse diagonalisée.
Mouvement longitudinal de traction - compression
- Détermination de la matrice de rigidité
- Détermination du second membre
- Calcul des efforts aux nœuds de la poutre
- Détermination de la matrice de masse
Nous décrivons dans ce chapitre l'obtention des matrices élémentaires de rigidité et de masse pour l'élément de poutre droite selon le modèle d'Euler (POU_D_E) ou de Timoshenko (POU_D_T. La matrice de masse pour être cohérente avec la matrice de rigidité est déterminée à partir du même test les fonctions.
Mouvement de torsion libre autour de l’axe longitudinal
Mouvement de flexion
- Flexion dans le plan (xOz)
- Flexion dans le plan (xOy)
- Modélisations des coudes
- Détermination de la matrice de masse cohérente avec la matrice de rigidité
- Flexion dans le plan (xOz)
- Mouvement de flexion autour de l’axe (Oz)
La matrice de rigidité pour un mouvement de flexion dans le plan xOy est obtenue de la même manière que dans le cas précédent. De même, pour le mouvement de flexion autour de l'axe O z, dans le plan x O y , s'écrit le travail des forces d'inertie.
Matrice de masse réduite par la technique des masses concentrées
Il suffit donc, pour obtenir les matrices de masse et de raideur associées à ce modèle, d'annuler les variables y et z contenues dans les matrices de masse et de raideur du modèle de Timoshenko. A noter que dans le modèle d'Euler-Bernoulli programmé dans Aster, l'inertie de rotation est également négligée. On constate clairement que les composantes M22 et M33 sont liées aux traductions des mouvements de flexion utilisant la technique des masses concentrées aux nœuds.
En revanche, l'origine des formules utilisées pour les composantes M55 et M66 associées aux rotations est inconnue.
Matrice de raideur centrifuge
Ce chapitre implique la considération des poutres droites dont la section a des propriétés jusqu'ici ignorées, notamment les poutres à centre de torsion excentrique par rapport à l'axe neutre (la section n'a pas 2 axes de symétrie) et celles dont la section se développe continûment sur leur axe.
Excentrement de l’axe de torsion par rapport à l’axe neutre
Il suffit donc de déterminer les matrices élémentaires de masse Mc et de rigidité Kc i. Les valeurs de ey et ez doivent être données à Code_Aster via l'opérande SECTION : 'GENERAL' de l'opérateur AFFE_CARA_ELEM, les valeurs par défaut sont bien entendu des valeurs nulles.
Sections variables
Calcul de la matrice de rigidité
- Détermination de la section équivalente ()
- Détermination d’une constante de torsion équivalente (Ceq)
- Détermination des moments géométriques équivalents
La détermination de la section équivalente n'utilise ni la méthode du [§4.1.1] pour obtenir la matrice de rigidité exacte ni l'approximation de la solution avec une fonction polynomiale comme décrit dans le [§4.1.4]. De plus, cette méthode permet d'obtenir des résultats exacts pour un problème statique sans force distribuée et conduit, comme nous le verrons, à une valeur de Seq comprise entre S1 et S2, ce qui dans le cas général assure la convergence de la solution approchée vers la solution exacte solution (sans connaître l’ordre de convergence). La section de la poutre étant variable, l’équation statique de traction-compression s’écrit sans effort réparti imposé.
La méthode est la même que pour le calcul de la section équivalente : elle consiste à intégrer l'équation précédente pour obtenir les efforts (couples de torsion fixes). Donc, dans le cas d'une section variant linéairement, on prend un moment géométrique polaire équivalent Ceq. On calcule les termes de la matrice de rigidité correspondant à la flexion dans le plan 0, x, z avec les valeurs dans le tableau suivant.
Calcul de la matrice de masse
- Par la méthode des masses équivalentes
- Par la méthode des masses concentrés (matrice diagonale)
Si la section change de manière homothétique, les matrices sont programmées, pour les différents mouvements, comme suit. Ce changement de géométrie ne modifie l'équation d'équilibre, dans le cadre de l'hypothèse de petites perturbations (HPP) autour de Vo (et V*), qu'en ajoutant un terme linéaire aux déplacements dont la matrice associée est appelée matrice de rigidité géométrique. et qui s'exprime avec Pour un modèle de poutre 3D, le tenseur de contraintes se réduit aux axes locaux de la poutre aux composantes xx, xy et xx, soit
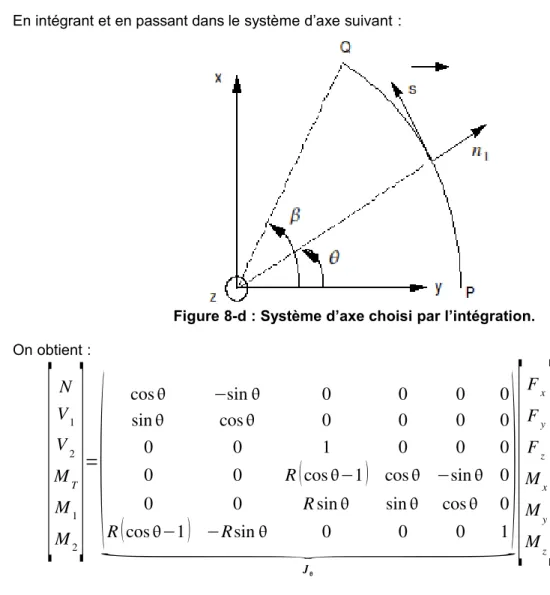
A chaque itération, la matrice de rigidité géométrique est mise à jour, chapitre 6, et ajoutée à la matrice tangente. Pour calculer la matrice de rigidité d'un élément de poutre courbe, nous effectuons le calcul en passant par différentes étapes. Nous partons des équations d'équilibre qui, une fois intégrées, nous donneront une matrice (notée Jθ) qui nous permettra de déterminer les forces en un point de la poutre connaissant les forces en un autre point.
Ensuite, en écrivant l'énergie potentielle de l'élément et en notant le découplage de la flexion dans le plan de l'élément de la flexion hors plan, nous déterminons les deux matrices de flexibilité. Pour relier les efforts appliqués en un point P de la structure aux efforts obtenus en un autre point Q de la structure, on intègre les équations d'équilibre statique d'une poutre courbe (sans effort réparti).
Matrice de flexibilité pour la flexion dans le plan de la poutre [C1]
Matrice de flexibilité pour la flexion hors du plan de la poutre [C2]
En divisant le problème en deux sous-problèmes et en utilisant le principe de superposition, on peut écrire. La matrice de rigidité pour les « déplacements » UP (donnés en base locale) et pour les . Iz par des coefficients de flexibilité donnés par l'utilisateur, pour prendre en compte la variation de raideur due à l'ovalisation (voir [§10.2]).
Pour la matrice de masse, nous ne considérons que la matrice réduite (masses concentrées), et nous faisons l'hypothèse simplificatrice que l'expression donnée pour les poutres droites [§4.4] reste valable lorsqu'on considère un élément droit de longueur R. Cette hypothèse est restrictive et ne permet pas de bien prendre en compte l'inertie en flexion ou en torsion due à la courbure.
Chargement par déformation
Chargement dû à la pesanteur
La force de gravité est donnée par le module de l'accélération g et un vecteur normalisé indiquant la direction n. Le principe de répartition de la charge sur les deux nœuds de la poutre est de prendre en compte les fonctions de forme x associées à le degré de liberté de chaque élément [§4] . Il faut bien entendu se placer dans le repère local de la poutre pour faire ce calcul.
Chargements répartis
Poutre droite à section constante
La figure 2 sont les composantes des moments fléchissants, aux points 1 et 2, issues des données utilisateur définies dans le référentiel local.
Poutres droites à section variable
Chargement thermique
Chargement électrique
Conducteur secondaire droit fini ou infini
Dans le cas d'un conducteur droit parallèle infini, sa position peut être donnée de deux manières. Pour le cas de plusieurs conducteurs droits parallèles infinis, il faut préciser directement le vecteur « Force de Laplace » normalisé. Celui-ci étant généralement donné dans le référentiel global, le vecteur « Force de Laplace » doit être déterminé dans le référentiel local de l'élément principal.
Pour le cas d'un conducteur droit en position finie ou infinie, sa position est déterminée par deux points P1 et P2 pour que le courant circule de P1 vers P2. La méthode choisie pour calculer la charge réduite sur les nœuds est bien entendu la même que précédemment. Mais ici l'intégration se fait numériquement en discrétisant l'élément en un certain nombre (en pratique : 100 points entre P1 et P2.
Conducteur secondaire décrit par une partie de maillage ASTER
L'option EFGE_ELNO permet de calculer le couple des efforts aux 2 nœuds de chaque élément de poutre. Les options SIPM_ELNO et SIPO_ELNO permettent de calculer les valeurs maximales des composantes du tenseur de contraintes intervenant dans un motif de poutre. L'option SIEF_ELGA permet le calcul des forces nodales (option FORC_NODA et réactions REAC_NODA).
Lorsqu'une de ces options se termine par "_C", cela signifie que les valeurs de déplacement et d'effort sont complexes.
Le torseur des efforts
Le tenseur des contraintes
Les différents types de mouvements sont déconnectés lorsqu'on travaille avec des axes majeurs (par définition). Dans le cas d'une poutre à section circulaire creuse, la flexibilité des coques minces n'est pas prise en compte ; il peut être nécessaire de corriger certains montants pour tenir compte de l'ovalisation de la section. Les coefficients de correction doivent être renseignés sous le mot-clé : POUTRE/SECTION=COUDE de la commande AFFE_CARA_ELEM.
Calcul des forces nodales et des réactions
Une barre est une poutre droite de section constante contenant uniquement les degrés de liberté en traction-compression. L'équation du mouvement, la matrice de rigidité et les efforts sont donc ceux des poutres (droites de section constante) liées à la traction-compression. Cependant, la matrice de masse doit prendre en compte les degrés de liberté dans les 3 directions de l'espace, principalement pour que dans les calculs dynamiques la masse dans chaque direction soit prise en compte (voir [V2.02.146]).
Ainsi, si l'on note L la longueur de l'élément, A l'aire de sa section et sa densité, la matrice de masse élémentaire est la suivante (avec les composantes dans l'ordre DX1 DY1 DZ1 DX2 DY2 DZ2 ) avec m= A L.