Dans ce contexte, la Méthode des Éléments Finis Étendus (XFEM) est une technique numérique qui permet l'insertion de surfaces discontinues à travers des éléments [bib2], les libérant de la contrainte de les maillage. Nous expliquons la solution du problème avec la méthode de Newton-Raphson (cf. [§4]) et présentons la linéarisation de la formulation variationnelle.
Formulation des équations du problème général
Dans cet article, nous commençons par écrire une formulation forte du problème et présenter les relations force/déplacement de saut associées pour les trois lois associées (cf. [§2]). Nous écrivons la discrétisation par éléments finis du problème, donnant les expressions matricielles de la matrice tangente et des vecteurs seconds membres (cf. [§5]).
Lois cohésives
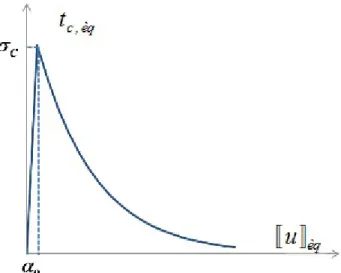
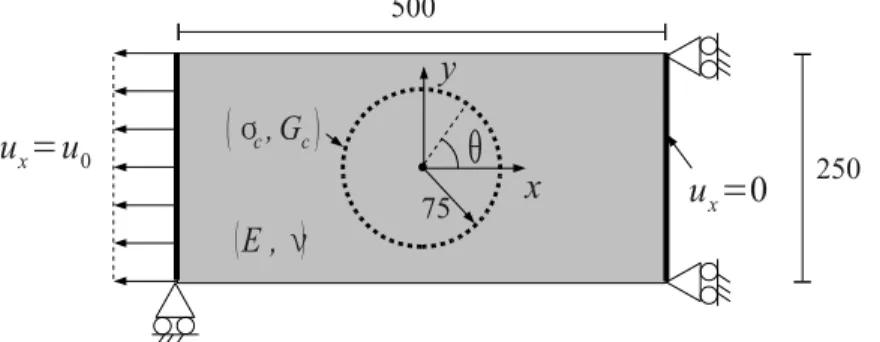
Sur la Figure 2.2.1-1, nous montrons la contrainte de cohésion pour le chargement en mode pur I en fonction du saut de déplacement normal. La figure 2.2.1-2 montre l'évolution de la force de cohésion équivalente en fonction du saut de déplacement équivalent selon cette loi de comportement.
Formulation pour la loi cohésive régularisée
Inconvénients d'une loi cohésive régularisée
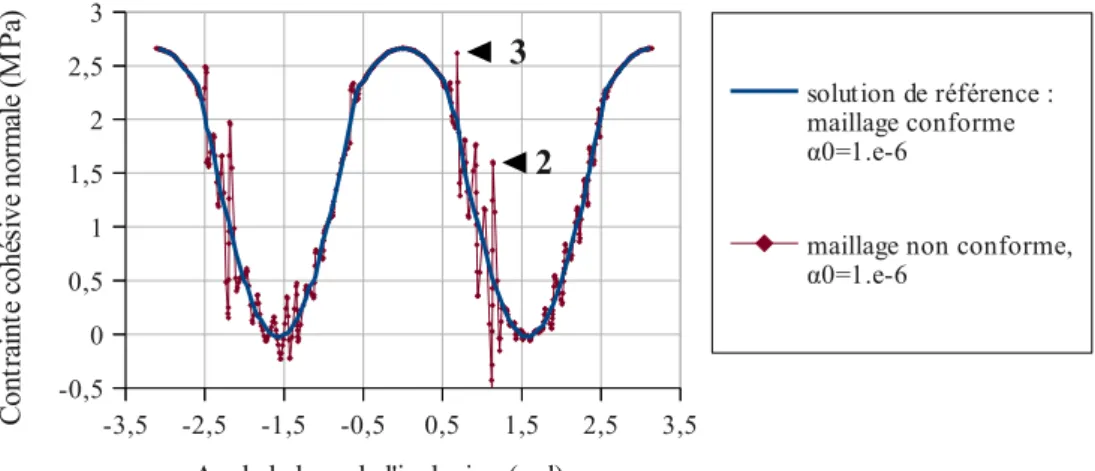
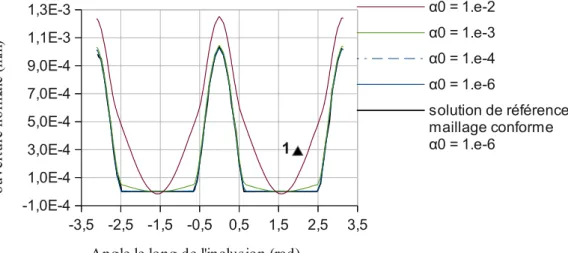
En considérant le test d'arrachement de la figure 3.2-4 (ce test est numérique, il ne correspond à aucune réalité physique), il est possible de mettre en évidence encore plus clairement le phénomène d'oscillation. Nous avons représenté sur la Figure 3.2-5 la contrainte d'interface pour un maillage conforme, qui sert de référence, et la contrainte pour un maillage non conforme.
Espace réduit pour la discrétisation de la contrainte d'interface
Formulation pour une loi cohésive mixte pour éléments quadratiques
Concernant la discrétisation de ces deux champs d'inconnues, une discrétisation simple respectant la condition de stabilité inf-sup, et cohérente avec la discrétisation de par collocation, consiste à discrétiser le déplacement avec les éléments P2 et le multiplicateur d'un chemin P1 sur un espace réduit adapté à X-FEM, comme décrit au §13 ou dans [R.
Formulation pour une loi cohésive mixte pour éléments linéaires
Le corps δ s'écrit donc localement comme une fonction λ + r Ü uÜ, que nous appellerons multiplicateur étendu et notée p. Dans la formulation pénalisée cohérente, la contrainte d'interface peut être interprétée comme proportionnelle au saut cohérent {w } : {λ }= r {w}. Un tel produit matriciel ne peut pas être réalisé en calcul élémentaire, notamment compte tenu du caractère non local de Mh.
Une telle opération globale est donc contraire à l'architecture informatique Code_Aster et doit être interdite autant que possible. Afin de résoudre le problème, w est introduit comme une nouvelle inconnue du problème, qui n'est pas discrétisée en Ü uÜ, mais est une projection sur l'espace réduit Mh. Analysé à l'aide de ce champ, désormais disponible dans la formulation, le terme de stabilisation précédent peut être déterminé en construisant un calcul de base.
Méthode de Newton-Raphson
Différenciation de la loi cohésive
Linéarisation du problème
On reprend les expressions de ces trois dérivées partielles données dans [R7.02.11], avec δ =Ü uÜ. Le système linéaire de trois équations à l'itération de Newton k1 s'écrit comme suit (pour éviter une écriture lourde, les références à l'itération de Newton sont omises car évidemment les inconnues sont δ devant et les champs de test sont désormais marqués d'un astérisque).
Loi cohésive régularisée
Loi cohésive mixte pour éléments quadratiques
On obtient alors Kgl par Kgl=QT⋅Kloc⋅Q, où Q est une matrice de passage orthonormée définie par. Comme précédemment, nous introduisons la matrice tangente de la loi de cohésion dans la base fixe Kgl des coefficients.
Loi cohésive mixte pour éléments linéaires
Pour un degré de liberté I de l'espace réduit (voir §13) il est possible de déterminer les composantes tc ,nI ,tt ,I τ1,tc ,I τ2 de la force de cohésion à partir de. Exprimons les matrices et seconds termes qui ne dépendent pas de la loi de cohérence. L’acte de cohésion séparera ainsi naturellement les domaines connectés et ouverts, ce qui nécessite une formulation de l’acte de cohésion permettant une reproduction fidèle des grands espaces connectés.
Ensuite, une mise à jour implicite du front de propagation peut être effectuée, ce qui rend la méthode proposée ici originale. Pour les algorithmes de propagation, nous utilisons une loi cohérente mixte à éléments linéaires CZM_LIN_MIX, qui est introduite dans le modèle par la commande DEFI_CONTACT, avec les mots-clés ZONE/RELATION. Supposons une structure présentant une surface fissurée, décrite par une loi de cohésion, pour laquelle on connaît le front de cohésion qui sépare la zone de cohésion effective de la face potentielle de la fissure, c'est-à-dire la surface au sein de laquelle la fissure peut se produire. prochaine étape de chargement (voir fig.6-a.
Réaliser une itération du calcul de propagation implique alors successivement les étapes suivantes (voir Figure 6-a) : .. a) réalisation du calcul mécanique au pas de temps suivant (commande STAT_NON_LINE), b) détection du nouveau front cohérent (PROPA_FISS commande, opération DETECT_COHESIF), c) déterminer la direction de propagation le long de ce nouveau front (commande CALC_G), d) la construction d'une nouvelle zone de fissure potentielle au-delà de ce front, à partir des directions déterminées en c), selon une extension avec une longueur fixe (commande PROPA_FISS, opération PROPA_COHESIF).
Description d'une fissure cohésive
L'initialisation de l'étude de propagation (avec l'étape a sur la Figure 6-a) se fait en précisant la zone potentielle de fissure et le front de propagation initial (voir Figure 6.1-d. Ce dernier peut correspondre à un coin de la structure, une simple ligne au bord libre ou à un fond de fissure préexistant (dans ce dernier cas, il doit être maillé). En pratique, on définit la discontinuité initiale de type COHESIF avec DEFI_FISS_XFEM (voir Figure 6.1-d.
Réalisation du calcul mécanique
Si possible, Δ l doit être beaucoup plus petit que le rayon de courbure attendu pour la surface fissurée (afin de capturer avec précision la géométrie de la fissure).
Détection du front
Un prérequis à la phase de détection est la production d'un ensemble de niveaux tangents réguliers ϕt : il doit être suffisamment régulier pour être utilisé par les algorithmes de propagation de fissures aux étapes de propagation suivantes. L'avancée de la fissure, qui produit le front nouvellement détecté à partir de l'ancien, est déterminée a posteriori (fig.a-b). 1.Pour chaque point P de l'ancien front, on détermine une distance de propagation en calculant la distance séparant P de l'intersection du plan (P, nP, tP) et du front "brut" nouvellement détecté (voir fig.6.3) - b, étape a).
La direction de propagation ayant été déterminée au pas de temps précédent (voir section 30), on connaît parfaitement la vitesse de propagation à l'ancien front (voir fig.6.3-b, étape c), ce qui permet : 3. Appliquer un algorithme de mise à jour des ensembles de niveaux (voir section 33), pour lesquels on effectue uniquement les opérations liées à l'ensemble des niveaux tangents (voir fig.6.3-b, étape d). Lorsque l'on détermine a posteriori l'avancée de la fissure, on ne considère pas les valeurs des extrémités de l'ancien front. Après cette opération, la valeur de l'avance peut être sensiblement différente des valeurs aux points voisins (voir fig.6.3-c), ce qui a pour effet de fausser l'algorithme de propagation qui suit (fig. 6.3-b, étape d ).
On peut utiliser un paramètre NB_POINT_FOND différent d'une étape de propagation à l'autre (par exemple si le front est en croissance), mais cet ajustement reste à la discrétion de l'utilisateur, il n'est pas automatique.

Détermination de la direction de propagation
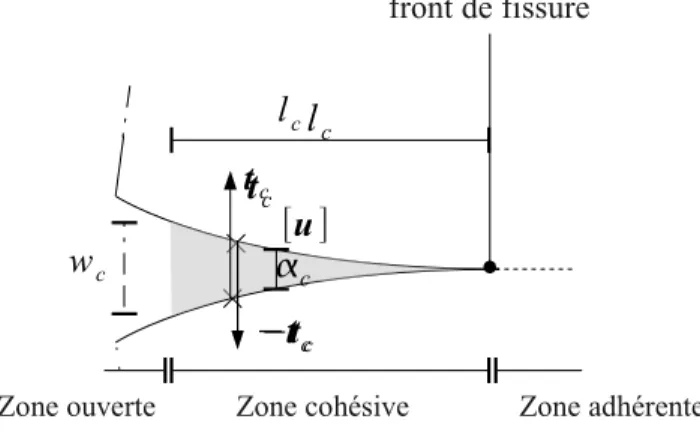
En effet, la base covariante (nP, tP) est corrigée pour être tangente à la surface libre (voir §33). Si possible, d doit être beaucoup plus petit que les rayons de courbure attendus pour la surface et le front de fissure (afin que leurs géométries respectives puissent être déterminées avec précision). L'intégrale de Jcoh s'annule en dehors de la zone cohésive, puisque tc=0 dans la zone ouverte et.
Ainsi, Jcoh est indépendant du contour C, à condition qu'il entoure la zone continue, et s'écrit . De plus, puisqu'il n'y a pas de singularité près du front en présence de forces de cohésion, on a J =0, confirmant que Jext ne dépend pas de C tant que cette dernière inclut la zone de cohésion. Physiquement, ces termes quantifient l'expression de l'énergie dissipée après chacun des trois modes de fracture si l'on suppose une propagation homothétique dans la direction θ et que la taille de la zone cohésive reste petite devant celle de l'échantillon.
Cette correction n'est plus appliquée dans le cas d'un calcul cohésif (voir fig.6.4-c), car ce risque est exclu du fait de la nature du calcul (intégrales de répartition surfacique).

Extension de la surface potentielle de fissuration
A partir des équations d'évolution, nous parvenons à montrer que pour chaque nœud M, tant que nous parvenons à projeter M sur un point P du front tel que M ∈(P, nP,tP), la mise à jour se réduit au problème suivant : le plan (P, tP,nP ). Par conséquent, nous calculons les nouvelles valeurs, plan par plan, par translation et rotation de plan comme suit. Si ce n'est pas le cas, la base (np,tp) doit être corrigée pour garantir cette propriété avant d'appliquer l'algorithme de propagation.
Il existe trois cas où cette propriété n'a pas été vérifiée, qui ont en commun que le point M dépasse à une extrémité du fond de fissure. Dans ce cas il faut remplacer tP par une t'P tangente au bord de la structure. Nous supposons que tP est alors corrigé selon cette procédure : t'P est simplement appelé tP.
Nous supposerons alors que nP a été corrigé selon cette procédure : nP est simplement noté nP.
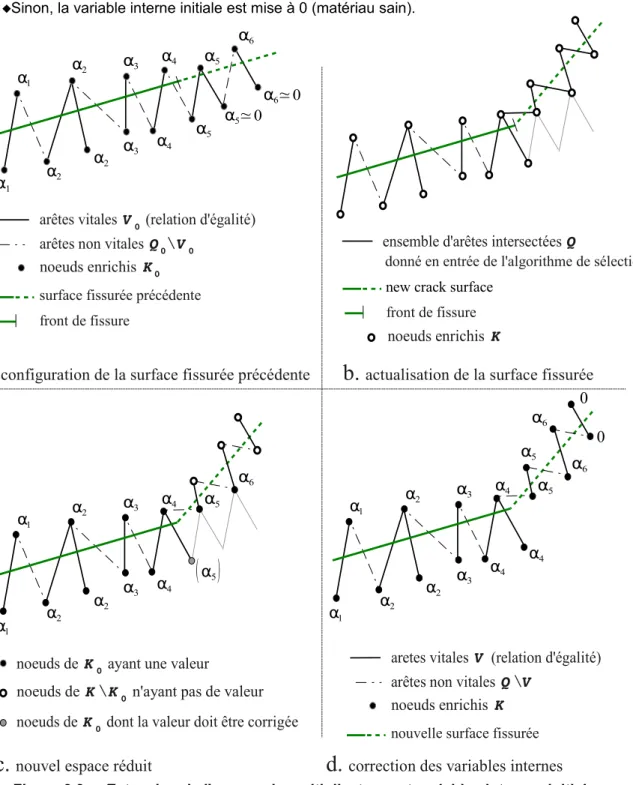
Extension de l'espace de multiplicateurs et variables internes initiales
Il existe également quelques nœuds de K 0 dont la valeur doit être modifiée car ils sont connectés à un autre groupe entre V et V0 (cercles gris sur la fig.6.6-a, étape c). Encore une fois, s'il existe une arête le reliant à un nœud m∈ K 0, la valeur de m est affectée à n. A noter que la présence de valeurs non nulles, bien que faibles, de variables internes en amont du front ( tels que .α5 et α6 sur la figure 6.6-a, l'étape a) vient du fait que le front de propagation a été aplati lors de sa détection (voir §27).