A.5. APÉNDICE 5. Equipo de medida
La unidad experimental ensayada, tal y como se ha ido explicando, está provista de una serie de sensores que monitorizan diversas variables del proceso (ver Tabla 14).
Tabla 14: Descripción de los sensores utilizados para las pruebas experimentales
Tipo de sensor Marca (modelo)
Presión dinámica Kistler (601-A) Presión estática Keller (P21/SR) Temperatura Nanmac (E6-20-K) Posición FESTO (MLO-POT-500) Posición Keyence (AT-100)
Las señales de estos sensores serán recogidas por un sistema de adquisición (véase Tabla 15), que a su vez será capaz de identificar perfectamente el inicio del experimento mediante una correcta monitorización del proceso. Se han acondicionado de manera determinada las señales de activación de la válvula de control direccional para que sirva de “trigger” de disparo al sistema de adquisición.
Tabla 15: Características del sistema de adquisición.
Sistema de adquisición DATA TRANSLATION DT-9804-BNC
Frecuencia adquisición 100 kHz
Resolución 16 bits
Rango entrada 8 DI/16 SE (10 V – ganancia programable)
Interfase USB
Válvula control direcc ional (VCD) (Alimentación 24 V) Cic uito
Trigger
(Alim entación 24 V) Conmutador VCD3 posiciones Regleta Conexión
SAD
ON OFF
220 V ~ 50 Hz
380 V
M
Trigg er IN 24 VD C
24 VDC
GN D
+24
GN D
Trigg er O UT Fuente alimentación PULS-ML50e100
24 V 50 W
Fig. 146: Esquema de conexión de los componentes del circuito oleohidráulico
Seguidamente, se muestra el esquema (Fig. 147) que retrata la instrumentación del banco y de la unidad experimental:
Fuente alimentación PS-300
24 V
F uente alim entación FAR-2
10 V
CCT-32 Convertidor
4-20 mA +/-10 V
CCT -32 Conv ertidor
4-20 mA +/-10 V
Regleta conex ión 7B series (Analog Devic es)
7B37 Convertidor Termopar tipo K
0/10 V
R egleta conexión 220 V ~ 50 Hz
Alimen ta ción se nso r po si cion FEST O
In put Tip o K (T1 y T2) An alog O utp ut (T1, T2 y po sicion ) Ana lo g Inp ut (po sic ion)
Analog Inp ut (P1 ) An a lo g Input (P2 ) Ana log O utpu t (P2 )
Ana log O utpu t (P1) ON
OFF
A.4. APÉNDICE 4.
Regresión multivariable
A menudo en ingeniería y en particular en este trabajo, el ingeniero se plantea la idea de efectuar experimentos para poder determinar, al menos de forma suficientemente aproximada, algunas variables de difícil medición directa, a partir de otras de más fácil obtención. Por otra parte, es necesario estudiar el experimento y analizar las variables de mayor incidencia para obtener una expresión empírica que proporcione de forma sintetizada la información proporcionada por dicho experimento. Esta expresión se deduce, habitualmente, a partir del análisis dimensional del problema, llegándose a expresiones, como las deducidas anteriormente del tipo:
i
k n i j 1
K N
=
α =
∏
Tomando logaritmos en ambos miembros de la anterior ecuación y efectuando los correspondientes cambios de variable, resulta:
o 1 1 2 2 k k
y = β + β x + β x + + β... x
Si durante un experimento se realizan i = 1,2,.., n mediciones para las variables dependientes (x1, x2,.., xm), determinando sus correspondientes observaciones, se
expresa:
i o 1 1i 2 2i k ki i
y = β + β( x + β x + + β... x )+ ε
Donde εi es la desviación de la respuesta observada yi respecto a la respuesta del ajuste
buscado.
La estimación de los coeficientes de los ajustes puede realizarse en base a minimizar la suma de los cuadrados de las desviaciones. Para minimizar “el error al cuadrado”, es condición necesaria que las derivadas parciales respecto de los coeficientes βj sean
nulas. Igualando a cero dichas parciales y considerando a bi como estimación de βi,
i o 1 1i 2 2i k ki
y =nb +b x +b x + +... b x
∑
∑
∑
∑
2
1i i o 1i 1 1i 2 1i 2i k 1i ki
x y =b x +b x +b x x + +... b x x
∑
∑
∑
∑
∑
…… …… …… …… ……
2
ki i o ki 1 ki 1i 2 ki 2i m ki
x y =b x +b x x +b x x + +... b x
∑
∑
∑
∑
∑
Una vez se disponen los valores βj solo cabe deshacer el cambio de variable
anteriormente realizado para obtener los exponentes ni del ajuste:y = ln α, βo= ln K,
A.3. APÉNDICE 3.
Análisis dimensional
Según el teorema π de Buckingham, el número de grupos adimensionales independientes que pueden emplearse para describir un fenómeno desconocido, en el que intervienen n variables, es igual al número n-r, siendo r, normalmente, el número de dimensiones básicas o fundamentales necesarias para expresar las variables dimensionalmente. Es evidente que los grupos adimensionales empleados son independientes y no pueden relacionarse entre sí mediante operaciones algebraicas. En esta Tesis Doctoral, el objetivo es discernir qué variables pueden tener influencia en el coeficiente de descarga. En este caso y según lo visto en la literatura sobre el tema [16], se podrá establecer la siguiente relación:
u d u d
f (l,D, , , , , ,R, ,T / T , p / p ,m ) 0ε µ ρ ϑ γ β ɺ =
En primer lugar, no se cometería un error apreciable descartando la rugosidad del orificio como variable influyente para el tipo de orificio estudiado en este trabajo, puesto que puede considerarse constante. La temperatura aguas abajo no tendrá influencia en la descarga, tal y como se desprende de la literatura sobre el tema [13], y por lo tanto puede descartarse como variable en favor de la temperatura crítica, la cuál será de utilidad posteriormente en el análisis dimensional. Las variables γ, R y β pueden ser sustituidas por la velocidad del sonido c, dado que las incluye de forma implícita. De este modo,
u c u d
f (l,D, , , ,c,T / T , p / p ,m ) 0µ ρ ϑ ɺ =
Una vez aplicado el principio de homogeneidad dimensional y despejando el flujo másico, queda
2 u u
2
c d
T p l
m D f , M, , , Re
D T p
= ϑρ
ɺ
( )
c d( )
a
b e
real u u
2
c d
m K l M T p Re
D D T p
=
ϑρ
ɺ
Donde los parámetros K, a, b, c, d y e serán determinados experimentalmente.
La dependencia del coeficiente de descarga (del conducto o del orificio) puede ser obtenida de la propia definición de éste y de la anterior expresión. Efectivamente:
( )
c d( )
a
b e
real u u
D
teor c d
m l T p
c Cte M Re
m D T p
A.2. APÉNDICE 2.
Suavizado de los registros experimentales
Una vez obtenidos los registros experimentales de las magnitudes de interés en función del tiempo transcurrido, como por ejemplo la presión en ambas cámaras, el recorrido de la válvula que obtura total o parcialmente el orificio, etcétera. Será necesario filtrar convenientemente las respectivas señales para eliminar ruidos inherentes a los circuitos eléctricos. En las siguientes figuras, véanse Fig. 145 (a) y (b), se muestran los valores adquiridos de la presión aguas arriba y aguas abajo con sendos transductores piezoresistivos, quedando de manifiesto que la señal lleva superpuesta un cierto nivel de ruido que a efectos prácticos pudieran ser innecesariamente procesados. Es obligado pues, efectuar un filtrado de la señal en aras de conseguir una señal continua (suave) y diferenciable.
Para dicho propósito se puede optar por diferentes procedimientos. Para la realización de este trabajo se estimó consideró más adecuado utilizar la interpolación mediante esplines por mínimos cuadrados.
67 67.5 68 68.5 69 69.5
0 0.1 0.2 0.3 0.4 0.5 0.6
Ajuste de la señal
Señal sensor presion
P re si on a gu as a rr ib a [b ar ] Tiempo [s] 35 40 45 50 55 60 65 70
0 0.1 0.2 0.3 0.4 0.5 0.6
Ajuste de la señal
Señal del sensor de presion
P re si on a gu as a ba jo [b a r] Tiempo [s] (a) (b)
Fig. 145: (a) Registro de la presión aguas arriba con un sensor piezoresistivo y su correspondiente ajuste. (b) Registro de la presión aguas abajo con un sensor piezoresistivo y el ajuste realizado.
A.1. APÉNDICE 1.
Método de Richmond
El método de Newton converge de forma cuadrática, y está basado en una aproximación lineal (tangente) a la función en el punto xk:
k k k
f(x) l(x) f(x ) f '(x )(x x )≈ = + −
La ecuación l(xk+1) = 0 conduce a la fórmula de iteración de Newton:
k
k 1 k
k
f(x )
x x
f '(x ) + = −
Con el propósito de acelerar el método de Newton, muchos artículos sobre análisis numéricos sugieren frecuentemente la utilización de una aproximación a f en xk de
mayor orden. Aquí se realizará una aproximación diferente. Hipótesis:
f es derivable suficientes veces
f tiene una raíz simple en x = a ( f(a)=0y f’(a) ≠0)
La aproximación inicial x0está lo suficientemente cerca de a para que la convergencia
en a se dé con total seguridad. Teorema
Añadiendo a las anteriores hipótesis que:
f’’(a) = f’’’(a) =…= fm-1(a) = 0
fm(a) ≠ 0
Suponiendo un xk conocido, por el desarrollo de Taylor, junto con el hecho que f y la
mayoría de sus derivadas desaparecen en x=a, existen unas constantes ξ0 y ξ1 entre a y
xk tal que:
(m)
m 0
k k k
f ( )
f(x ) f '(a)(x a) (x a) m! ξ = − + − (m) m 1 1 k k
f ( )
f '(x ) f '(a) (x a) (m 1)!
−
ξ
= + −
−
Si se sustituyen estas expresiones en la fórmula de Newton:
(m) (m)
m 0
k 1
k 1 k k
k k
f ( )
f(x ) 1 f ( )
x a x a (x a)
f '(x ) f '(x ) (m 1)! m! +
ξ ξ
− = − − = − −
−
si se fija un dominio N = [a-l,a+l] de a para un l adecuado pequeño, de forma que las desigualdades
0
f '(x) c≥ >0
(m)
1
f (x) ≤c
son ciertas en N para algunas constante c0 y c1. Si xk N, entonces
(m) (m)
1 0 1 1
k 0
mf ( ) f ( ) mc c : C
f '(x )m! m!c
ξ − ξ ≤ + =
y por lo tanto
m
k 1 k
x + − ≤a C x −a
para una constante C.
Cuanto más se parece f a una función lineal, más rápidamente convergerá la iteración de Newton.
El objetivo es acelerar la convergencia del método de Newton y para ello se acondicionará una función determinada para que parezca casi lineal en un dominio de la raíz de manera que se acelere la convergencia del método de Newton. Como es evidente los ceros de esta nueva función deben ser los mismos.
Para el caso f(a)=0, f’(a)>0, y f’’(a) ≠ 0, si se considera la función F(x) = f(x)·g(x)
donde la función g(x) se determinará a continuación. Con F(a) = 0 y, si g(a) ≠ 0
entonces F’(a) ≠ 0. Así
F''(a) 2 f '(a)g'(a) f ''(a)g(a)= +
Se desea que se cumpla la ecuación F’’(a) = 0 en el punto x = a. Si se despeja g’(x) yse integra se obtiene como solución general:
C g(x)
f '(x)
=
Con C = 1 y aplicando el método de Newton a F(x) conduce a:
(
)
k k
k 1 k k 2
k
k k k
F(x ) f(x )
x x x
1
F'(x ) f '(x ) f(x )f ''(x ) 2
+ = − = −
11. REFERENCIAS
[1] S. De las Heras (1996) "Optimización de suspensiones hidroneumáticas con amortiguador integrado "Universitat Politècnica de Catalunya. Phd Thesis.
[2] P. S. Els & B. Grobbelaar (1993) "Investigation of the time and temperature dependency of hydro-pneumatic suspension systems" SAE Technical paper series 930265.
[3] P. S. Els, B. Grobbelaar (1999) "Heat transfer effects on hydropneumatic suspension systems" Journal of Terramechanics 36 197-205.
[4] Giuseppe Quaglia, Massimo Sorli (2000). "Experimental and theoretical analysis of an air spring with auxiliary reservoir". 6th Triennal Int. Symp. on Fluid Control, Measurement and Visualization, FLUCOME 2000, Aug. 13-17,2000, Sherbrooke (Qc), Canada.
[5] P.S. Meirelles and M. Baldi. (2003). "Damping behaviour in hydropneumatic suspension". Universidade Estadual de Campinas, SIMEA 2003 Brasil.
[6] C. L. Giliomee, P. S. Els. (1998). "The semi-active hydropneumatic spring and damper system" Journal of Terramechanics, Volume 35, pp. 109-117
[7] B. B. Hall & J. S. Tang (1990) "Analysis of active and semi-active vehicle suspensions fitted with a pneumatic self-energizing levelling device" Proc. Instn. Mech. Engrs. Vol. 204.
[8] Robert C.Reid, J. M. Prausnitz, B. E. Poling "The properties of gases & liquids" (4th edition). Mc Graw-Hill, Inc ISBN-0-07-051799-1.
[9] B. I. Lee, M. G. Kesler (1975) "A Generalized Thermodynamic Correlation Based on Three-Parameter Corresponding States". AIChE Journal Vol. 21, No. 3, pp. 1197-1203.
[10] D. R. Lide, H. V. Kehiaian (1994) “CRC Handbook of Thermophysical and Thermochemical Data”. CRC PRESS ISBN 0-8493-0197-1.
[11] A. Vasserman, Y.Z. Kazavchinskii, V. A. Rabinovich. (1971) “Thermophysical properties of air and air components”. Ed. D. Slutzkin UDC546.217
[12] W. Bober & W. L. Chow (1991) "Nonideal Gas Effects for the Venturi Meter". Transactions of the ASME, Journal of Fluids Engineering Vol. 113.
[14] Kagawa T., Wang T., Ishi Y., Terashima Y., Morozumi T., Mogami T. Oneyama N. (2003), “Determination of flow rate characteristics of small pneumatic valves using isothermal chamber by pressure response”, 7th Symposium on Fluid Control, measurement and Visualization.
[15] Oneyama N., Takahashi T., Terashima Y., Kuroshita K. Kagawa T. (2003), “Study and suggestions on flow-rate characteristics of pneumatic components”, 7th Symposium on Fluid Control, measurement and Visualization.
[16] B. E. L. Deckker, Y. F. Chang (1968) "Transient Effects in the Discharge of Compressed Air from a Cylinder Through an Orifice". Transactions of the ASME, Journal of Basic Engineering.
[17] Pourmovahed, A. and Otis, D. R., “An experimental thermal time constant correlation for Hydraulic accumulators”, Transactions of the ASME, Journal of Dynamics Systems. Measurement and control, Vol.112, March 1990, pp. 116-121. [18] W. M. Rohsenow, J. P. Hartnett & Y. I. Cho. "Handbook of Heat Transfer". 4th
Edition Mc Graw-Hill, Inc ISBN-0-07-053555-8.
[19] S. R. Hong, S. B. Choi, Y. T. Choi, N. M. Wereley (2004) "A hydro - mechanical model for hysteretic damping force prediction of ER damper: experimental verification" Journal of Sound and Vibration Volume 285, pp. 1180-1188.
[20] R. C. Johnson (1964) "Calculations of Real-Gas Effects in Flow Through Critical-Flow Nozzles". Transactions of the ASME, Journal of Basic Engineering.
[21] D. A. Kouremenos & X. K. Kakatsios (1988) "A Correlation of the Isentropic Exponents of Real Gases" Journal of Heat and Fluid Flow, Vol.9, No 4, pp. 410-414.
[22] D. A. Kouremenos & K. A. Antonopoulos (1991) "Sound Velocity and Isentropic Exponents of Real Air on its Compressibility Chart" Journal of Heat and Fluid Flow, Vol.12, No 2, pp. 137-141.
[23] A. C. Aldo, B. M. Argrow (1995) "Dense Gas Flow in Minimum Length Nozzles". Transactions of the ASME, Journal of Fluids Engineering Vol. 117, pp. 270-276.
[24] S. Nakao, M. Takamoto (2000) "Discharge Coefficients of Critical Venturi Nozzles for CO2 and SF6". Transactions of the ASME, Journal of Fluids Engineering Vol. 122, pp. 730-734.
[26] W. C. Edmister (1973) "Applied hydrocarbon thermodynamics - Part 49 – Enthalpies of saturated liquids mixtures via Clapeyron Equation". Hydrocarbon processing May pp. 169-175.
[27] G. Soave (1971) "Equilibrium constants from a modified Redlich-Kwong equation of state". Chemical Engineering Science, pp. 1197-1203.
[28] M. J. Moran, H. N. Shapiro (2004) “Fundamentos de Termodinámica Técnica. 2ª Edición (4º edición original) Ed. Reverté, S. A. ISBN 84-291-4313-0.
[29] R. Carreras, A. Comas, A. Calvo (1993) “Motores de Combustión Interna. Fundamentos”. 1ª Edición Ed. UPC. ISBN 84-7653-354-3.
[30] R. P. Benedict (1971) "Generalized Contraction Coefficient of an Orifice for Subsonic and Supercritical Flows" Transactions of the ASME, Journal of Basic Engineering.
[31] K. C. Cornelius, K. Srinivas (2004) "Isentropic Compressible Flow for Non-Ideal Gas Models for a Venturi". Transactions of the ASME, Journal of Fluids Engineering Vol. 126.
[32] Ower E, and Pankhurst R,C. (1977) “The measurement of air flow” 5th Edition Pergamon Press ISBN 0-08-021282-4.
[33] Frank P. Incropera, David P. Dewitt "Fundamentals of Heat and Mass Transfer". 4th Edition John Wiley & Sons ISBN-0-471-30460-3.
[34] Baehr H. D., “Tratado moderno de termodinámica. Teoría y aplicaciones técnicas” 2ª edición (1979) Editor Montesó. ISBN 84-7186-101-1
[35] H. Gröber y S. Erk (1967) “Transmisión de Calor” Selecciones científicas D.L. 9725-1967. Madrid
[36] D. P. De Witt. John. Fundamentals of heat and mass transfer. 3rd Ed. F. P. Wiley & Sons, Inc.(1990) ISBN 0-471-51729-1.
[37] I. H. Shames. (1995) "La Mecánica de los Fluidos". 3ª Edición McGraw-Hill ISBN-958-600-246-2.
[38] V. L. Streeter. (2000) "Mecánica de los Fluidos". 9ª Edición McGraw-Hill ISBN-958-600-987-4.
[39] Irwin Millar y John E. Freund (1973) “Probabilidad y estadística para ingenieros” Editorial Reverté Mexicana S.A.
10. NOMENCLATURA
A Área [m2]
D Diámetro [m]
F Fuerza [N]
L Longitud [m]
M Nº Mach [-]
Q Calor [J]
R Constante gas [J/(kg·K)]
T Temperatura [K]
V Volumen [m3]
W Trabajo [J]
Z Factor compresibilidad [-]
a Difusividad térmica [m2/s]
c Velocidad sonido [m/s]
cD Coeficiente descarga [-]
cp Calor específico presión constante [J/(kg·K)]
cv Calor específico volumen constante [J/(kg·K)]
f Frecuencia [Hz]
h Entalpía específica [J/kg]
k Constante elástica [N/m]
m Masa [kg]
n Índice politrópico [-]
Nu Nº Nusselt [-]
p Presión [Pa]
Pr Nº Prandtl [-]
Ra Nº Rayleigh [-]
Re Nº Reynolds [-]
s Entropía específica [J/(kg·K)]
t Tiempo [s]
u Energía interna [J]
Símbolos griegos
α Coeficiente transferencia calor [W/(m2·K]
β Compresibilidad [1/K]
ε Rugosidad [m]
γ Relación calores específicos [-]
ϑ Velocidad [m/s]
λ Conductividad térmica [W/(m·K)
µ Viscosidad dinámica [Pa·s]
ν Viscosidad cinemática [m2/s]
ρ Densidad [kg/m3]
τ Constante tiempo térmica [s]
ω Factor acéntrico Pitzer [-]
Subíndices
d ef g p pg pr r u w
Aguas abajo Eficaz Gas Pared Pared-Gas
Pared-Refrigerante Reducida
9. CONCLUSIONES
Los objetivos establecidos en el apartado 1.3 han sido cubiertos ampliamente. Se ha conseguido conocer el comportamiento de la rigidez de una suspensión neumática y al mismo tiempo estudiar un número determinado y limitado de parámetros que la definen y/o afectan. Después del trabajo realizado queda un modelo capaz de predecir el comportamiento de una suspensión neumática ofreciendo una buena correlación con la experimentación y que marca el camino a seguir para controlar esta respuesta ante las perturbaciones externas.
El estudio de la rigidez neumática exigía el conocimiento preciso de los factores que influían en un proceso de compresión - expansión como el de la suspensión.
En la introducción de esta Tesis Doctoral, se consideraba un requisito imprescindible la definición y comprensión de la característica o constante de rigidez de una suspensión neumática, para poder así abordar otras temáticas en el estudio de su regulación en función de los agentes externos que pudieran perturbarle.
Para poder llevar a cabo este objetivo se ha demostrado con creces la poca precisión de la metodología clásica frente a la utilización de un modelo que tiene en cuenta los efectos no ideales del gas. Este modelo comprende el desarrollo de un algoritmo capaz de resolver la ecuación de estado de Lee-Kesler, tarea llevada a buen término mediante una subrutina desarrollada en FORTRAN.
Los efectos del gas real han sido analizados en la suspensión neumática utilizada por De las Heras [1] en su obra, donde se hacía uso del procedimiento indicado por la Norma Internacional ISO 6358 [13]. Durante el desarrollo del presente trabajo se han demostrado las razones de su descarte a la hora de construir el modelo. En el capítulo 6, se muestran las discrepancias entre las hipótesis de gas ideal y gas real para la caracterización del flujo a través de un orificio.
Para la realización del modelo ha sido necesario el desarrollo de un nuevo algoritmo capaz de definir el comportamiento del gas en la garganta de la tobera analizada. Ha sido necesaria la construcción de una unidad experimental, ver apartado 6.8, que junto a un apropiado y preciso modelo de diagnosis han hecho posible el desarrollo de un modelo capaz de resolver el flujo entre las dos cámaras de la suspensión descrita por De las Heras [1]. Nuevamente una subrutina desarrollada en FORTRAN ha sido la encargada de proporcionar los resultados expuestos en el apartado 6.9.
La técnica desarrollada por Otis [17], como ya se ha comentado en multitud de ocasiones, ha sido contrastada mediante la construcción de una unidad experimental. Se ha visto su buena correlación con los resultados obtenidos y expuestos en el apartado 7.8, para una compresión súbita.
Paralelamente, se ha desarrollado un modelo de diagnosis alimentado por la utilización de dos técnicas de cálculo del coeficiente de transferencia de calor. Por un lado, a partir del registro experimental de presiones y de la carrera del pistón en un banco de pruebas para suspensiones, se ha aplicado la técnica del método indirecto de evaluación del flujo calorífico global e instantáneo (apartado 7.2) y de forma paralela se ha utilizado la técnica de Fourier para la evaluación del flujo calorífico instantáneo local, a partir del registro de la temperatura superficial de la pared en el mismo experimento (apartado 7.3).
Se han contrastado ambas técnicas con los registros experimentales, véase apartado 8.3, observando una mejor correlación con el modelo desarrollado en este trabajo. Un resultado que era de esperar, puesto que Otis [17] desarrolló su modelo para acumuladores hidráulicos. Como en los casos anteriores, la resolución del modelo ha sido llevada a buen término mediante una subrutina desarrollada en FORTRAN.
Finalmente con la ayuda de los submodelos formados por la resolución de la ecuación de estado, la caracterización del orificio y la evaluación de la transferencia de calor, se ha construido un modelo de predicción capaz de anticipar el comportamiento de la suspensión neumática en función de las irregularidades del terreno simuladas en un banco de pruebas para suspensiones.
Una vez cotejados los resultados con la experimentación se puede asegurar una buena correlación, tanto para el caso de una suspensión neumática de una única cámara como en el caso de la suspensión neumática de doble cámara.
Puede asegurarse, que otro de los objetivos marcados en el apartado 1.3 se ha cumplido con creces, puesto que del estudio del fluido de trabajo y su fenomenología, se conoce la interacción de éste con su entorno, es decir, se sabe de que manera el gas se ve influido por lo que le rodea y viceversa. En otras palabras, ha sido posible detallar con muy buena precisión lo que le sucede al nitrógeno, en este caso, en el interior de una suspensión neumática. Es importante indicar, también, que mediante el algoritmo desarrollado para resolver la ecuación de estado el modelo es extensible a otros fluidos no polares.
En el primer capítulo de esta Tesis Doctoral, se ha subrayado el control de la rigidez neumática cómo la motivación especial para la realización de este trabajo. El estudio realizado pretende, siguiendo el trabajo realizado por De las Heras [1] y a partir del análisis del comportamiento de la suspensión de doble cámara, aportar una solución que determine como controlar la respuesta de la suspensión neumática a las diferentes e imprevisibles irregularidades que ofrece una carretera cualquiera.
Para ello es importante recordar las conclusiones obtenidas anteriormente:
• A menor diámetro del orificio, mayor rigidez.
• A menor volumen muerto y en consecuencia mayor longitud de la cámara auxiliar (recordar condición [L0] 1C = [L0+L1] 2C, véase Fig. 130), mayor rigidez.
En primer lugar cabe explicar que es lo que se desea. Recordando los conceptos previos vistos en el apartado 2.1, la suspensión debe sostener el vehículo, aportar control direccional en la maniobrabilidad y aislamiento efectivo de los pasajeros/carga frente a las perturbaciones del terreno. Un buen confort en la conducción requiere una suspensión suave, mientras que una insensibilidad a las cargas aplicadas requiere una suspensión rígida. Una buena maniobrabilidad requiere una suspensión de rigidez intermedia respecto a las otras dos.
Por ejemplo, si lo que se desea es un vehículo turismo, interesará ante todo un buen confort, siempre y cuando las cargas aplicadas no sean tan elevadas que lo que interese sea aislarla. En esta situación se desearía, por ejemplo, un diámetro grande que asegurase una suavidad confortable a las irregularidades y un diámetro pequeño a amplitudes o frecuencias elevadas.
Fig. 144: Croquis del control de la rigidez de la suspensión neumática - fluido electroreológico.
Los fluidos electroreológicos son suspensiones de partículas conductoras extremadamente finas en fluidos no conductores. La viscosidad aparente de estos fluidos varía en forma reversible con la acción de un campo eléctrico. Un fluido electroreológico puede cambiar su consistencia líquida por la que podría tener, por ejemplo, un gel y en pocos milisegundos recuperar su viscosidad original. La variación de viscosidad es proporcional al potencial aplicado.
Su aplicación en la industria del automóvil ya se ha llevado a buen término en el caso de los amortiguadores. Los fluidos electroreológicos y magnetoreológicos (su viscosidad varía por el efecto de un campo magnético) se utilizan para atenuar las vibraciones en sistemas suspensión - amortiguador.
Para conseguir un buen control, es necesario haber obtenido un modelo preciso de la fuerza de amortiguación que pueda predecir la histéresis del amortiguador en cuestión. Existen multitud de modelos para este tipo de amortiguadores en la literatura, pero sería interesante encontrar un modelo que pudiera describir el movimiento del flujo en el sistema hidráulico. Es el caso de Hong et al. [19], quienes en su obra describen un amortiguador electroreológico cilíndrico aplicable a turismos pequeños y donde comparan las características de la histéresis provocada por las fuerzas de amortiguación. El diseño de un mecanismo o artilugio equivalente capaz de regular el área eficaz de paso de flujo entre las dos cámaras es la llave para un control absoluto de la rigidez neumática de la suspensión. El mecanismo en cuestión, será capaz de convertir la suspensión neumática en un elemento rígido capaz de aislar a los pasajeros y a la masa suspendida de las irregularidades del terreno cuando la situación lo requiera. Del mismo modo, debe ser capaz de adaptar la suspensión a una característica mucho más suave para asegurar el confort de sus ocupantes, siempre manteniendo el compromiso rigidez - suavidad que asegure una buena maniobrabilidad.
Antes de concluir, sería interesante destacar la idea de una modificación del banco de pruebas para aumentar el rango de amplitudes y frecuencias de excitación, como mínimo hasta los 10 Hz a los que puede estar sometida la masa no suspendida.
Para ello es posible sustituir la válvula proporcional de control direccional por otra de sección de paso mayor. Otra solución pasa por sustituir el cilindro actuador por otro de menor tamaño. Para esta última solución, es evidente que las unidades experimentales ensayadas deberían ser más pequeñas, una condición que no afecta en absoluto a la hora de modelizar su comportamiento, siempre y cuando se mantengan los rangos de presión y temperatura ensayados.
También sería interesante colocar una célula de carga, tal y como ya se ha comentado en el apartado 7.5, para poder evaluar así el calor generado por fricción y desarrollar su correspondiente modelo.
A parte del flanco abierto en cuanto a los fluidos electroreológicos, sería muy interesante profundizar en el estudio de la turbulencia para el caso del ensayo realizado en el cálculo del coeficiente de descarga. La solución pasaría por hallar el coeficiente de transferencia de calor en función del chorro que impacta en las paredes del recinto del volumen fijo.
8. MODELO DE UNA SUSPENSIÓN NEUMÁTICA
Una vez resuelta la transferencia de calor en ambas cámaras y una vez conseguida la caracterización de la restricción que las separa en función de su geometría y de las variables que intervienen en el proceso, ha llegado el momento de desarrollar un modelo de predicción para la suspensión neumática, que a su vez sirva para contrastar los modelos de diagnosis resueltos con anterioridad.
8.1 Modelo de predicción
En el modelo de predicción, interesará evaluar las variaciones de la presión y de la temperatura en los recintos, conocidas las características de actuación de la restricción y la transferencia de calor entre las cámaras y el ambiente.
Conocida el área efectiva de la restricción (Aef = CD·A) y los valores p, T en ambas
cámaras, se está en condiciones de evaluar mediante las ecuaciones del capítulo 6, los gastos másicos entre cámaras dm2/dt y dm1/dt.
Una vez se ha obtenido el coeficiente global e instantáneo α de transferencia de calor en función del tiempo es posible determinar dQ2/dt y dQ1/dt.
Con las ecuaciones del capítulo 3, se podrá determinar la presión y calcular la temperatura del gas en ambas cámaras, a partir de las derivadas previamente calculadas. A continuación se muestra un esquema (Fig. 102) donde pueden interpretarse los diferentes inputs y outputs correspondientes al modelo de predicción planteado.
Caracterización del flujo a través de
un orificio Modelo de transferencia de calor
Modelo de predicción
Evolución de p y T en función de las caracteristicas del terreno
Cd α
8.2 Estimación de la temperatura de la pared
Para la resolución del modelo de predicción expuesto en el apartado anterior, será preciso conocer la evolución de la temperatura de la pared. Por esta razón, se hace necesaria la disquisición correspondiente para estimar con la máxima precisión posible la evolución de esta variable.
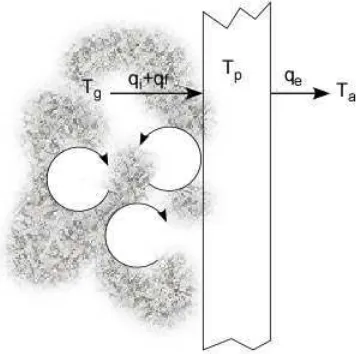
La pared del cilindro, tal como se esquematiza en la Fig. 103, está expuesta a un flujo calorífico en su cara interna debido a la temperatura del fluido de trabajo y a otro debido a la fricción del émbolo, mientras que su pared externa está expuesta a la convección con la temperatura ambiental. Mientras no se alcance un equilibrio entre ambos la pared irá acumulando energía y en consecuencia la pared aumentará su temperatura.
p
g p p
f g g a a a v
dT q A (T T ) A (T T ) mc
dt
′
′ ′
+ α − − α − =
ɺ (8.1)
[image:20.595.213.391.417.594.2]Para obtener una estimación de la variación de dicha temperatura con el tiempo puede aplicarse el principio de conservación de la energía y efectuarse algunas hipótesis simplistas al objeto de obtener una relación matemática de la temperatura en función del tiempo.
Fig. 103: Balance térmico de la pared de la suspensión.
Hipótesis: Los siguientes flujos medios se mantienen constantes en el tiempo:
f
qɺ Flujo de calor generado por fricción
g p
gA (Tg T )′
α − Flujo de calor por convección en la pared interna del cilindro
p aA (Ta ′ T )a
Condiciones de contorno: t = 0, Tp = Ta.
p
amb
t T
v
p
0 T
g p p
f g g a a a
mc
t dt dT
q A (T T ) A (T T ) ′
= =
′ ′
+ α − − α −
∫
∫
ɺ
(8.2)
Integrando se resuelve que:
t /
p p,
T T (1 e− τ) ∞
= − (8.3)
siendo
g
g g a f g g g g a
p,
g g a a
A T (q A T A T ) T
( A A )
∞ = α + + α − α
α + α
ɺ
y
v
g g a a
mc
A A
τ =
α + α
Tabla 10: Propiedades térmicas del acero.
Acero
Densidad (ρ) 7.87·103 [kg/m3] Capacidad específica (c) 447 [J/(kg·K)] Conductividad térmica (K) 80.2 [W/(m·K)] Difusividad térmica (a) 2.2798·10-5 [m2/s]
Así, el aumento de temperatura medio experimentado por el material durante un ciclo será:
(
)
p g r f
p v,p
1
T Q Q Q
m c
∆ = ∆ − ∆ + ∆ (8.4)
entendiendo ∆Tp como:
( ) ( )
p p i 1 p i
T T T
+
∆ = − (8.5)
Recordando que el calor transferido o sustraído por el gas de trabajo a la pared, puede ser evaluado a partir
(
)
g g g pg g
Q A T T dt
∆ = α
∫
− (8.6)donde Tpg ≡ Tp. Si se desea, la ecuación anterior puede ser expresada a partir de la
constante térmica τ experimental introducida en el apartado 7.1.
(
)
v g
g pg g
c m
Q T T dt
∆ = −
τ
∫
(8.7)Por otra parte, el calor sustraído o transferido de la pared al fluido que envuelve a la suspensión ∆Qr se realiza por convección forzada si la suspensión está instalada en un
vehículo en marcha. En cambio, la convección es natural para el caso que ocupa, un banco de ensayos. Por lo tanto, se ha evaluado el coeficiente de transferencia de calor para la convección natural sobre las paredes externas de cilindro verticales de longitud
L>>D mediante expresiones empíricas [18], tal y cómo se ha expuesto en el apartado 7.4.
Tales expresiones permiten determinar el coeficiente de transferencia de calor αr para
temperaturas de pared y del medio ambiente Tr constantes. Con lo que durante un ciclo
de trabajo,
(
)
r r r pg r
Q A T T dt
8.3 Validación del modelo
Una vez expuesto el modelo de predicción, únicamente resta contrastar su bondad mediante la experimentación. Nuevamente se ha utilizado el banco de ensayos para suspensiones expuesto en el apartado 7.7.
[image:23.595.122.475.211.445.2]
(a) (b)
Fig. 104: (a) Unidad experimental sometida a una perturbación senoidal en el banco de ensayos. (b) Equipo experimental utilizado para el registro de la presión del gas y del volumen desplazado.
40 45 50 55 60
28 30 32 34 36 38
Pexperimental
Pteorica (C·Rem)
P
teorica (Otis)
28 30 32 34 36 38
P
re
si
on
[b
ar
]
Carrera [cm]
Fig. 105: Comparación de la presión en función de la carrera para la suspensión monocámara obtenida a partir del modelo de predicción utilizando el método de Otis y a partir del método indirecto frente al registro de presión experimental en función de la carrera para una excitación de 0.1 Hz.
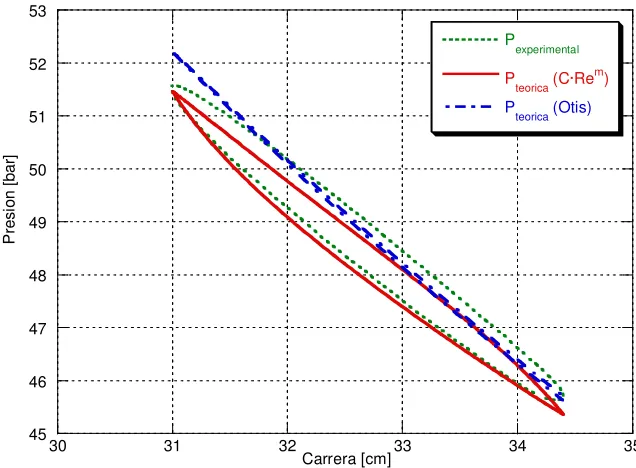
45 46 47 48 49 50 51 52 53
30 31 32 33 34 35
P
experimental
Pteorica (C·Rem)
Pteorica (Otis)
30 31 32 33 34 35
P
re
si
on
[b
ar
]
Carrera [cm]
[image:24.595.145.464.89.336.2] [image:24.595.143.461.433.667.2]25 26 27 28 29 30 31 32 33
30 31 32 33 34 35 36 37 38
P experimental
P teorica (C·Rem)
P teorica (Otis)
30 31 32 33 34 35 36 37 38
P
re
si
on
[b
ar
]
Carrera [cm]
Fig. 107: Comparación de la presión en función de la carrera para la suspensión de doble cámara obtenida a partir del modelo de predicción utilizando el método de Otis y a partir del método indirecto frente al registro de presión experimental en función de la carrera para una excitación de 0.1 Hz.
26 27 28 29 30 31 32
31 32 33 34 35 36
P experimental
P teorica (C·Rem)
P teorica (Otis)
31 32 33 34 35 36
P
re
si
on
[b
ar
]
Carrera [cm]
[image:25.595.145.463.458.691.2]El método de Otis, según lo visto en los gráficos anteriores (Fig. 105 a Fig. 108), no será tan preciso como la expresión obtenida a partir de la regresión multivariable de los resultados del modelo de diagnosis. Una conclusión que no debería sorprender, puesto que el método de Otis es una técnica desarrollada para acumuladores oleohidráulicos, aunque algunos autores lo hayan aplicado a suspensiones hidroneumáticas.
8.4 Conclusiones
Finalmente, una vez ha sido demostrada la fiabilidad del modelo de predicción, se está en disposición de realizar un estudio detallado sobre el comportamiento tanto de la suspensión neumática de una única cámara como de la de doble cámara.
El objetivo es comprobar de qué manera influyen en el comportamiento de la suspensión tanto las distintas variables de perturbación, como la propia morfología de la unidad experimental. Es importante recordar como afectan las hipótesis de gas real e ideal en la respuesta de la suspensión neumática a unas determinadas condiciones. Finalmente interesará comparar ambas configuraciones de la suspensión, es decir, de qué forma actuarán las suspensiones de doble cámara y monocámara ante una perturbación concreta.
En primer lugar parece interesante comparar el comportamiento de la suspensión para unas condiciones determinadas frente a los procesos adiabático e isotérmico de referencia. Para ello se muestran dos esquemas representativos de la suspensión neumática simple (Fig. 109 y Fig. 110), donde podrán interpretarse los datos de los análisis realizados.
Espesor (Etw) Espesor (Etw0)
ρw, CVw
L0
D0 D
L
Fig. 110: Datos geométricos suspensión neumática y propiedades térmicas del material (acero).
Tabla 11: Datos según Fig. 109 y Fig. 110 para las gráficas de la Fig. 111 a la Fig. 129.
D 8 [cm]
L 40 [cm]
L0 5.5 [cm]
D0 4 [cm]
Dext 9.5 [cm]
Etw 2 [cm]
Et0w 2 [cm] ρw 7870 [kg/m3]
cvw 447 [J/kg/K]
dmin 0 [cm]
de 15 [cm]
dmax 30 [cm]
pcarga 25 [bar]
Tcarga 300 [K]
20 40 60 80 100 120
0 50 100 150 200 250 300
p
p isentropica
p isotermica
P
re
si
on
[b
ar
]
Carrera [mm]
Observando la figura anterior (Fig. 111), puede deducirse que para una compresión/expansión isentrópica la suspensión se comportará de una forma más rígida que en el caso de la isoterma. En ambos procesos de referencia la disipación de energía es nula, no es así para la respuesta de la suspensión a 1 Hz, cuya constante de rigidez se encuentra comprendida entre ambos procesos de referencia, tal y como se ha visto en la figura anterior (Fig. 111).
A continuación se muestra el mismo análisis pero para una frecuencia de 10 Hz (Fig. 112), en el primer caso y para una de 0.001 Hz en el segundo (Fig. 113).
20 40 60 80 100 120
0 50 100 150 200 250 300
p
p isentropica
p isotermica
P
re
si
on
[b
ar
]
[image:28.595.154.454.502.724.2]Carrera [mm]
Fig. 112: Evolución de la presión en función de la carrera, para el N2 como gas ideal. Nota: Frecuencia de excitación = 10 Hz.
20 40 60 80 100 120
0 50 100 150 200 250 300
p
p isentropica
p isotermica
P
re
si
on
[b
ar
]
Carrera [mm]
Viendo las figuras anteriores (Fig. 112 y Fig. 113), es posible afirmar que a mayor frecuencia de excitación más adiabático será el proceso, y a menor frecuencia de excitación más isotérmico. Esta afirmación no hace más que confirmar una de las características de la suspensión neumática, la cuál se comporta de una forma más rígida a frecuencias de excitación elevadas, mientras que para frecuencias bajas su constante de rigidez es más suave.
A continuación se pretende estudiar la respuesta de la suspensión de la Fig. 109, bajo diferentes perturbaciones senoidales de diferentes características. En primer lugar, se verá como responde la suspensión bajo diferentes amplitudes de excitación y en segundo lugar bajo diferentes frecuencias. Es importante señalar que se han representado únicamente los valores referentes al primer ciclo.
0 50 100 150 200
0 100 200 300 400
dmax = 200 mm
d
max = 300 mm
dmax = 400 mm
F
ue
rz
a
[k
N
]
Carrera [mm]
200 250 300 350 400 450 500 550 600
0 100 200 300 400
dmax = 200 mm
d
max = 300 mm
dmax = 400 mm
T
em
pe
ra
tu
ra
[K
]
Carrera [mm]
Fig. 115: Evolución de la temperatura en función de la carrera, para el N2 como gas ideal. Nota: dmin = 0 cm, frecuencia de excitación = 1 Hz.
-1 104
-8000 -6000 -4000 -2000 0 2000
0 100 200 300 400
dmax = 200 mm
d
max = 300 mm
dmax = 400 mm
C
al
or
t
ra
ns
fe
rid
o
[J
]
Carrera [mm]
0 10 20 30 40 50 60
0 50 100 150 200 250 300
0.001 Hz
0.1 Hz
1 Hz
5 Hz
10 Hz
F
ue
rz
a
[k
N
]
Carrera [mm]
Fig. 117: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2 como gas ideal.
Según los gráficos observados a mayor amplitud, más pérdida de calor, mayor presión y mayor temperatura, debido a que la carrera efectiva de compresión es mayor. En el caso de la expansión es justo al contrario, a mayor carrera efectiva, más bajas serán la temperatura y la presión y en consecuencia también disminuirá el calor, como es evidente.
Con una perturbación de amplitud mayor, la constante elástica aumentará su rigidez y también lo hará la energía.
Para el análisis de la frecuencia de excitación, se corrobora lo visto anteriormente en los casos de comportamiento adiabático e isotérmico. Al aumentar la frecuencia de excitación aumenta la rigidez de la suspensión, en cambio la suspensión se comporta de una forma más suave en el caso de disminuir la frecuencia.
10 15 20 25 30
0 50 100 150 200
1 ciclo
5 ciclos
15 ciclos
40 ciclos
F
ue
rz
a
[k
N
]
Carrera [mm]
Fig. 118: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2 como gas ideal. Nota: dmin = 0 cm, de = 10 cm, dmax = 20 cm, pcar = 50 bar, frecuencia de excitación = 1 Hz.
260 280 300 320 340 360 380
0 50 100 150 200
1 ciclo
5 ciclos
15 ciclos
40 ciclos
T
em
pe
ra
tu
ra
[K
]
Carrera [mm]
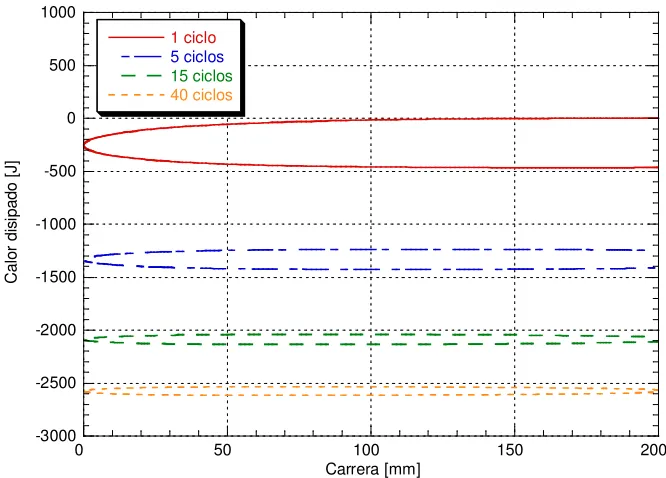
-3000 -2500 -2000 -1500 -1000 -500 0 500 1000
0 50 100 150 200
1 ciclo
5 ciclos
15 ciclos
40 ciclos
C
al
or
d
is
ip
ad
o
[J
]
Carrera [mm]
Fig. 120: Evolución del calor intercambiado por el gas en función de la carrera, para el N2 como gas ideal. Nota: dmin = 0 cm, de = 10 cm, dmax = 20 cm, pcar = 50 bar, frecuencia de excitación = 1 Hz.
A partir de las gráficas anteriores (Fig. 118 y Fig. 120 ), puede deducirse que a medida que va aumentando el número de ciclos la suspensión neumática irá perdiendo rigidez y disipará menos. Este efecto es justo lo contrario de lo expuesto por Els et al. en [3]. La razón de esta discrepancia es el entorno que rodea al gas, mientras la suspensión hidroneumática de [3] sufre el efecto del calentamiento del aceite del amortiguador, en el caso que ocupa la suspensión está bajo la convección natural del aire ambiente, el cuál va enfriando la unidad experimental.
[image:33.595.130.463.94.333.2]-200 -100 0 100 200 300 400 500
0 5 10 15 20 25 30 35 40
Calorpared-gas
Calor
pared-ambiente
C
al
or
[
J]
[image:34.595.133.463.94.335.2]Nº ciclos
Fig. 121: Evolución del calor intercambiado entre el gas y la pared interior, y entre el ambiente y la pared exterior, en función del número de ciclos, para el N2 como gas ideal. Nota: dmin = 0 cm, de = 10 cm, dmax = 20 cm, pcar = 50 bar, frecuencia de excitación = 1 Hz.
300 300.2 300.4 300.6 300.8 301 301.2
0 5 10 15 20 25 30 35 40
T pared [K]
T
em
pe
ra
tu
ra
p
ar
ed
[K
]
Nº ciclos
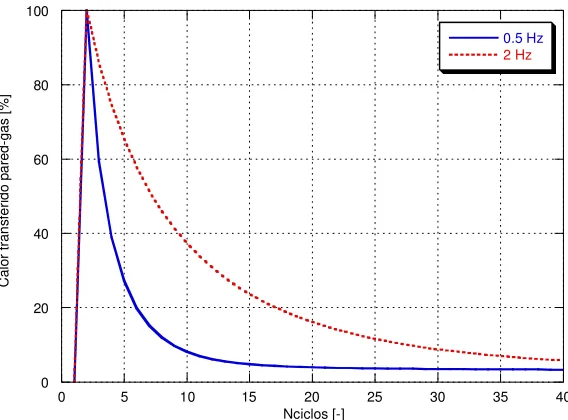
[image:34.595.133.462.435.674.2]Las gráficas anteriores (Fig. 121 y Fig. 122) sugieren la necesidad de conocer qué puede ocurrir al estudiar la evolución tanto de la temperatura de la pared como del calor transferido en función de la frecuencia de excitación. Este análisis se muestra a continuación en los gráficos de las Fig. 123 a Fig. 125.
0 500 1000 1500
0 5 10 15 20 25 30 35 40
0.5 Hz 1 Hz 2 Hz 5 Hz C al or tr an sf er id o pa re d-ga s [J] Nº ciclos
Fig. 123: Evolución del calor intercambiado entre el gas y la pared interior en función del número de ciclos, para el N2 como gas ideal. Nota: dmin = 0 cm, de = 10 cm, dmax = 20 cm, pcar = 50 bar.
Parece ser que en los primeros ciclos es cuando se transfiere todo el calor y en función de la frecuencia de excitación alcanzará antes o más tarde el valor de estabilización tal y como puede observarse en la siguiente gráfica (Fig. 124):
0 20 40 60 80 100
0 5 10 15 20 25 30 35 40
0.5 Hz 2 Hz C al or tr an sf er id o pa re d-ga s [% ] Nciclos [-]
[image:35.595.150.443.161.370.2] [image:35.595.157.441.494.704.2]300 300,5 301 301,5 302 302,5 303 303,5 304
0 5 10 15 20 25 30 35 40
0.1 Hz
0.5 Hz 1 Hz2 Hz 5 Hz
T
em
pe
ra
tu
ra
p
ar
ed
-g
as
[K
]
Nº ciclos
Fig. 125: Evolución de la temperatura de la pared en función del número de ciclos, para el N2 como gas ideal. Nota: dmin = 0 cm, de = 10 cm, dmax = 20 cm, pcar = 50 bar.
Es importante resaltar el comportamiento de más isotérmico a más adiabático a medida que se va aumentando la frecuencia, tal y como ha podido comprobarse en la Fig. 125. Para concluir el análisis de la suspensión neumática de una sola cámara de manera independiente, es imprescindible observar la respuesta de la suspensión según las hipótesis de gas ideal y gas real. El análisis se realizará en función de la presión de carga, para 25 y 100 bar respectivamente.
10 15 20 25 30 35 40 45 50
0 50 100 150 200 250
Fuerza gas ideal
Fuerza gas real
F
ue
rza
[kN
]
[image:36.595.152.443.96.300.2]Carrera [cm]
[image:36.595.156.443.506.713.2]0 50 100 150 200 250
0 50 100 150 200 250
Fuerza gas ideal
Fuerza gas real
F
ue
rz
a
[k
N
]
[image:37.595.137.462.69.310.2]Carrera [cm]
Fig. 127: Constante de rigidez de la suspensión neumática, para el N2. Nota: dmin = 0 cm, de = 12.5 cm, dmax = 25 cm, pcar = 100 bar, frecuencia de excitación = 1 Hz.
Parece evidente que, bajo la hipótesis de gas real la suspensión neumática posee una constate elástica más rígida. No obstante, como puede observarse en los gráficos anteriores, a bajas presiones no existen apenas discrepancias entre ambas hipótesis. Aunque como se podrá comprobar a continuación (Fig. 128 y Fig. 129) las discrepancias en temperatura y calor transferido son más notables:
250 300 350 400 450
0 50 100 150 200 250 300
Temperatura gas ideal
Temperatura gas real
T
em
pe
ra
tu
ra
[K
]
Carrera [mm]
[image:37.595.135.463.485.723.2]-2500 -2000 -1500 -1000 -500 0
0 50 100 150 200 250 300
Calor gas ideal
Calor gas real
C
al
or
tr
an
sf
er
id
o
[J
]
[image:38.595.131.462.96.337.2]Carrera [mm]
Fig. 129: Evolución del calor transferido por el gas en función de la carrera, para el N2. Nota: dmin = 0 cm, de = 15 cm, dmax = 30 cm, pcar = 25 bar, frecuencia de excitación = 1 Hz.
El estudio independiente de la suspensión de doble cámara se realizará de forma análoga. De este modo, considerando la unidad experimental detallada en las Fig. 130 y Fig. 131, se procederá al estudio de la influencia del volumen de la cámara de volumen fijo (L1, D1), véase Fig. 130, en el comportamiento de la suspensión.
Espesor (Etw) Espesor (Etw0)
ρw, CVw
L0
D0 D
L
Espesor (Etw1)
L1 D1 dv
Fig. 131: Datos geométricos suspensión neumática y propiedades térmicas del material (acero)
Tabla 12: Datos según Fig. 130 y Fig. 131 para las gráficas de la Fig. 132 a la Fig. 139.
D 8 [cm]
L 40 [cm]
L0 5.5 [cm]
D0 4 [cm]
Dext 9.5 [cm]
D1 4 [cm]
L1 9 [cm]
D1ext 9.5 [cm]
Etw 2 [cm]
Et0w 2 [cm]
Et1w 2 [cm] ρw 7870 [kg/m3]
cvw 447 [J/kg/K]
dmin 0 [cm]
de 15 [cm]
dmax 30 [cm]
dv 0.2 [cm]
pcarga 25 [bar]
Tcarga 300 [K]
10 20 30 40 50 60
0 50 100 150 200 250 300
L1 = 2 cm
L1 = 9 cm
L1 = 15 cm
L1 = 25 cm
F
ue
rza
[kN
]
Carrera [mm]
[image:39.595.145.448.242.711.2]10 15 20 25 30 35 40 45 50
0 50 100 150 200 250 300
D1 = 4 cm
D1 = 10 cm
F
ue
rz
a
[k
N
]
Carrera [mm]
Fig. 133: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2 como gas ideal. Nota: CD = 1, frecuencia de excitación = 1 Hz.
Según el análisis realizado, el hecho de variar el diámetro en lugar de la longitud tiene el mismo efecto, puesto que se está variando de igual forma el volumen de la cámara auxiliar. El hecho de ir aumentando el volumen de la cámara auxiliar, provoca que la suspensión gane en suavidad. Las diferencias no son muy pronunciadas para el caso de la energía disipada, aunque será función del área de transferencia de calor, tal y como puede deducirse de la Fig. 133 donde la histéresis de ciclo es mayor, dado que el diámetro tiene más influencia en el tamaño del área mojada.
[image:40.595.139.464.90.328.2]10 15 20 25 30 35 40 45 50
0 50 100 150 200 250 300
dv = 0.5 mm
dv = 1 mm
dv = 2 mm
d
v = 5 mm
F
ue
rz
a
[k
N
]
Carrera [cm]
Fig. 134: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2 como gas ideal. Nota: Frecuencia de excitación = 0.5 Hz.
-3000 -2500 -2000 -1500 -1000 -500 0
0 50 100 150 200 250 300
dv = 0.5 mm
dv = 1 mm
dv = 2 mm
d
v = 5 mm
C
al
or
tr
an
sf
er
id
o
[ J
]
Carrera [cm]
Fig. 135: Evolución del calor transferido por el gas en la cámara de volumen variable en función de la carrera, para el N2 como gas ideal. Nota: Frecuencia de excitación = 0.5 Hz.
[image:41.595.135.464.88.327.2] [image:41.595.132.464.384.625.2]Como era de esperar, el efecto de la frecuencia de excitación vendrá considerablemente condicionado por el orificio ensayado, hecho que puede comprobarse en las figuras siguientes (Fig. 136 y Fig. 137):
10 20 30 40 50 60
0 50 100 150 200 250 300
0.5 Hz
2 Hz
F
ue
rz
a
[k
N
]
Carrera [cm]
0.5 [mm] d
[image:42.595.140.464.150.387.2]v
Fig. 136: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2 como gas ideal. Nota: pcar = 50 bar.
10 15 20 25 30 35 40 45 50
0 50 100 150 200 250 300
0.5 Hz
2 Hz
F
ue
rz
a
[k
N
]
Carrera [cm]
2 [mm] d
v
[image:42.595.140.464.452.694.2]Para concluir, resaltar que si se desea aumentar la rigidez de la suspensión con el aumento de la frecuencia, se ha visto que lo ideal es disminuir el diámetro del orificio de separación entre ambas cámaras
En el caso de la suspensión neumática de una sola cámara se analizó la influencia de las hipótesis de gas ideal y de gas real sobre el comportamiento de la suspensión. Parece lógico que se realice un estudio análogo para el caso de la suspensión neumática de doble cámara.
10 20 30 40 50 60
0 50 100 150 200 250 300
Fuerza gas ideal
Fuerza gas ideal
F
ue
rz
a
[k
N
]
Carrera [cm]
50 [bar]
[image:43.595.161.443.224.432.2]pcarga
Fig. 138: Evolución de la fuerza en función de la carrera (Característica de la suspensión), para el N2. Nota: Frecuencia de excitación = 0.5 Hz.
0 50 100 150 200 250 300 350
0 50 100 150 200 250 300
Fuerza
gas ideal
Fuerza
gas ideal
F
ue
rz
a
[k
N
]
Carrera [cm]
100 [bar] p
carga
[image:43.595.161.443.495.701.2]Viendo los gráficos de las Fig. 138 y Fig. 139, se observa una mayor discrepancia entre las hipótesis de gas ideal y de gas real que en el caso de la suspensión neumática de una sola cámara. Es lógico si se tiene en cuenta que a las diferencias existentes en un proceso de compresión/expansión se le añaden las discrepancias de un sistema abierto como el se ha estudiado en el capítulo 6.
Finalmente, una vez realizados los diferentes estudios parámetricos de forma independiente, para las dos configuraciones de la suspensión neumática estudiadas en este trabajo, restaría el estudio comparativo entre ambos tipos de suspensión. Para ello, se han analizado ambos comportamientos de forma conjunta en función de los dos únicos elementos diferenciales, es decir, la cámara auxiliar y el diámetro de la restricción que separa ambas cámaras.
Recordando los esquemas referentes a la suspensión de una única cámara (Fig. 109) y a la de doble cámara (Fig. 130), se mantendrá constante la siguiente condición:
[L0] 1C = [L0+L1] 2C
Para este primer análisis y según la condición anterior, conocido el volumen en el punto muerto superior de la suspensión neumática de una sola cámara, se conservará el mismo valor para la suspensión neumática de doble cámara. Considerando que en el volumen del punto muerto superior para la suspensión de una única cámara también se tiene en cuenta el correspondiente a la cámara auxiliar.
Se expondrán las evoluciones de la fuerza y del calor transferido para diferentes valores de L0 y L1 en el caso de la suspensión de doble cámara, con la condición de que la suma
de ambas siempre sea la L0 correspondiente a la suspensión de cámara simple.
Los valores escogidos son: para el caso L0 = L1 = 5 cm, para los otros dos casos se ha
escogido, respectivamente, 7 y 3 cm y viceversa.
Tabla 13: Datos según Fig. 109, Fig. 110, Fig. 130 y Fig. 131 para las gráficas de la Fig. 140 a la Fig. 129.
Suspensión 1 cámara Suspensión 2 cámaras
D 8 [cm] D 8 [cm]
L 40 [cm] L 40 [cm]
L0 10 [cm] D0 4 [cm]
D0 4 [cm] Dext 9.5 [cm]
Dext 9.5 [cm] D1 4 [cm]
Etw 2 [cm] D1ext 9.5 [cm]
Et0w 2 [cm] Etw 2 [cm]
ρw 7870 [kg/m3] Et0w 2 [cm]
cvw 447 [J/kg/K] Et1w 2 [cm]
dmin 0 [cm] ρw 7870 [kg/m3]
de 15 [cm] cvw 447 [J/kg/K]
dmax 30 [cm] dmin 0 [cm]
Tcarga 300 [K] de 15 [cm]
pcarga 25 [bar] dmax 30 [cm]
dv 0.1 [cm]
pcarga 25 [bar]
Tcarga 300 [K]
10 20 30 40 50 60 70
0 50 100 150 200 250 300
SN 1 camara
SN 2 camaras (L1=L0)
SN 2 camaras (L
1>L0)
SN 2 camaras (L1<L0)
F
ue
rz
a
[k
N
]
Carrera [mm]
[image:45.595.131.465.381.628.2]-2500 -2000 -1500 -1000 -500 0
0 50 100 150 200 250 300
SN 1 camara
SN 2 camaras (L1=L0)
SN 2 camaras (L
1>L0)
SN 2 camaras (L1<L0)
C
al
or
[J
]
Carrera [mm]
Fig. 141: Evolución del calor transferido por el gas en función de la carrera, para el N2 como gas real. Nota: Frecuencia de excitación = 1 Hz.
Parece evidente que la suspensión de doble cámara bajo las condiciones expuestas responde con una mayor suavidad a las perturbaciones externas cuanto menor es la longitud de la cámara auxiliar (L1) y mayor el espacio muerto (L0), características que la acercan al comportamiento de la suspensión neumática de una sola cámara. En cambio si se reduce el espacio muerto (L0), la suspensión se vuelve más rígida.
En segunda instancia y manteniendo la validez de la condición geométrica anterior (para [L1] 2C = 10 cm y [L0] 2C = 0 cm), se pretende estudiar el efecto del diámetro de la restricción,
10 20 30 40 50 60 70 80 90
0 50 100 150 200 250
SN 1 Camara
SN 2 Camaras (dv = 0.1 cm)
SN 2 Camaras (dv = 1 cm)
F
ue
rza
[kN
]
Carrera [mm]
[image:46.595.154.443.71.277.2] [image:46.595.159.443.510.716.2]-3000 -2500 -2000 -1500 -1000 -500 0
0 50 100 150 200 250
SN 1 Camara
SN 2 Camaras (dv = 0.1 cm)
SN 2 Camaras (dv = 1 cm)
C
al
or
[J
]
[image:47.595.132.463.88.327.2]Carrera [mm]
Fig. 143: Evolución del calor transferido por el gas en función de la carrera, para el N2 como gas real. Nota: dmin = 0 cm, de = 12.5 cm, dmax = 25 cm, frecuencia de excitación = 1 Hz.
A partir de las gráficas anteriores (Fig. 142 y Fig. 143), puede afirmarse que para las condiciones estudiadas, un diámetro menor del orificio supone un aumento de la rigidez y una disipación mayor durante el ciclo incluso frente a la suspensión de una sola cámara.
Observando los resultados mostrados en este apartado, se confirma el hecho de que cuanto mayor sea el orificio más se parecerán las evoluciones de la suspensión de doble cámara a la de una sola cámara, un fenómeno bastante obvio a priori.
En conclusión, a lo largo de este extenso apartado se han analizado todos los parámetros que afectan de forma directa o indirecta a la rigidez de una suspensión neumática y en consecuencia al comportamiento de la suspensión en función de las perturbaciones externas a las que puede verse sometida según sean sus condiciones de trabajo en un instante determinado.
El análisis ha abarcado desde el tipo de excitación a la que es sometida y cómo le afecta, es decir, la influencia que puedan tener la frecuencia y la amplitud de la irregularidad encontrada sobre el terreno. Se ha estudiado la respuesta debida a la transferencia de calor en función del número de ciclos y la evolución seguida por la temperatura superficial de la pared hasta que llega a un valor constante.
7. MODELO DE TRANSFERENCIA DE CALOR
La transmisión de calor en una suspensión neumática es debida a la convección provocada por el flujo turbulento existente en el cilindro hacia las paredes de la cámara que contiene el gas, dependiendo por lo tanto de las condiciones locales instantáneas térmicas y del flujo en las proximidades de la pared y en ésta.
Una de las características que dificulta la formulación analítica y en consecuencia la solución del caso, radica en el carácter transitorio del proceso semi-estacionario de calentamiento o enfriamiento progresivo de las paredes de la cámara de trabajo por compresión y/o expansión del cilindro. Aparecen unas variaciones periódicas de temperatura superficial motivadas por la evolución del fluido. Por otra parte, la complejidad geométrica, las diferencias locales de espesor e incluso de materiales, la variación de la superficie expuesta al gas como consecuencia del movimiento del émbolo, así como la heterogeneidad del campo de temperaturas y velocidades, hacen que el problema únicamente sea abordable bajo unas hipótesis restrictivas más o menos acusadas. El establecimiento de estas hipótesis vendrá condicionado por la aplicación objeto de estudio.
La mayoría de metodologías que formulan el problema de la transferencia de calor suelen precisar de unas determinaciones experimentales que proporcionarán unos datos o unas condiciones de contorno a partir de las cuales se determinarán los flujos térmicos.
Para plantear el problema cabe distinguir entre tres dominios (ver Fig. 79):
• Gas,
• pared y
• medio refrigerante (ambiente, en el caso que ocupa).
Tpg
Tg
Tr GAS SOLIDO GAS
Tg
Conveccion
Conveccion Conduccion
Tpr
[image:49.595.214.380.569.718.2]e
En primera instancia, y con el fin de establecer los diferentes dominios y los mecanismos de transmisión de calor, considérense unas situaciones estacionarias extremas.
En estas regiones se analizarán las ecuaciones que rigen especialmente en la zona de gas (interior del cilindro) y en la pared. Con el fin de establecer la nomenclatura en las tres zonas materiales de análisis, para la situación estacionaria es posible establecer que:
(
)
g g pg
Qɺ = α A T −T (7.1)
(
)
s pg pr
Qɺ = λ A T −T e (7.2)
(
)
r pr r
Qɺ = α A T −T (7.3)
Como se ha comentado anteriormente, el tratamiento riguroso del problema es prácticamente inabordable dadas las limitaciones existentes en métodos que permitan la resolución espacial y temporal del campo de velocidades y temperaturas del fluido. Hasta que la mecánica de fluidos computacional permita una resolución con suficiente exactitud se requiere estimar el coeficiente de transmisión de calor a partir de correlaciones obtenidas de forma experimental.
Por esta razón, se utiliza el coeficiente α de transferencia global de calor para evaluar el flujo térmico, artificio a través del cuál se traslada el problema a una correcta estimación de α. El flujo térmico q a través de la interfase gas/pared puede ser expresado en función de la temperatura del gas fuera de la capa límite térmica y de la temperatura superficial de la pared mediante:
(
)
= α g − pg
q T T (7.4)
Siendo Tg la temperatura media de la zona en el instante considerado, y Tpg la
temperatura de la pared en contacto con dicha zona.
El coeficiente α en principio engloba todas las formas de transmisión de calor, y al igual que las temperaturas, variará tanto localmente como temporalmente, sin embargo, en muchas aplicaciones se considera promediado superficialmente.
El salto térmico deberá ser definido. En cuanto a Tpg no hay ambigüedad puesto que se
trata de la temperatura en una cota bien establecida, la de la superficie del sólido. Sin embargo la del gas variará con la distancia a la superficie. Si bien en la mayoría de aplicaciones se toma como temperatura de referencia del gas (Tg) la que tiene en la zona