INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
CONTROL DIFUSO DE pH EN UN REACTOR QUÍMICO POR LOTES
TESIS
QUE PARA OBTENER EL GRADO DE:
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
PRESENTA:
GARCÍA RESÉNDIZ EDUARDO GIBRAIN 2008301925
MÉNDEZ LÓPEZ OSCAR 2008301978
RODRÍGUEZ RAMÍREZ ERIK CHRISTIAN 2008302192
DIRECTORES DE TESIS
M. en C. ANTONIO OBREGON TENORIO
ING. EDGAR MAYA PÉREZ
M. en C. MIRIAM GÓMEZ ÁLVAREZ
iii
Resumen
Este trabajo tiene como propósito desarrollar un prototipo a nivel laboratorio de un
control de pH en un reactor químico por lotes, por medio de la utilización de
Laboratory Virtual Instrument Engineering Workbech (LabVIEW) y de Tarjetas de
Adquisicion de Datos (DAQ), componentes de hardware y software de
National
Instruments® (NI), como parte del prototipo, fue un componente importante la
utilización de una técnica de control moderna, que es la aplicación de un algoritmo
difuso como ley de control. Una parte medular en el desarrollo del siguiente trabajo,
es el de mostrar la selección de los instrumentos, materiales, equipo y dispositivos
electrónicos utilizados en el prototipo realizado. Las consideraciones tomadas en
cuenta para la selección de estos elementos antes mencionados, son los recursos
con las que cuenta el Instituto y este equipo de trabajo que fueron destinados para
este prototipo.
Inicialmente en este trabajo se abordan los conceptos básicos para lo que fue el
desarrollo del prototipo, esto es el marco teórico, el cual contempla desde sistemas
de control, el sistema químico de la reacción de Neutralización y los sistemas
informáticos, como también los sistemas de adquisición de datos, siendo así un
panorama teórico que introduce al proyecto.
Posteriormente se contempla la justificación del proyecto tomando en cuenta, que el
prototipo es un apoyo en prácticas de laboratorio para los estudiantes de Escuela
Superior de Ingeniería Mecánica y Eléctrica (ESIME) Zacatenco de la carrera de Ing.
en Control y Automatización, también otro aspecto que se muestra, son el de las
aplicaciones existentes en el control del pH, tanto en el área científica como en las
industrias que lo requieren.
Para la siguiente sección, esta fue dividida en dos etapas, que contemplan el
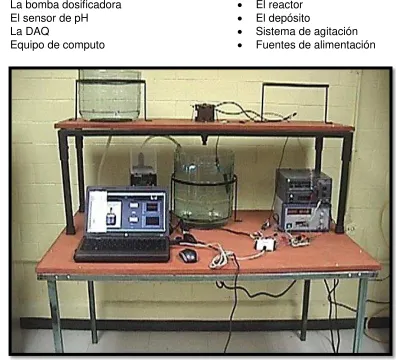
desarrollo del presente trabajo, la primera se muestra las partes físicas que
componen el diseño del prototipo, como lo es la bomba de dosificación, el sensor de
pH, el sistema de agitación y la tarjeta de adquisición de datos. Para la segunda
parte, se llevaron acabo las pruebas de cada uno de los dispositivos de manera
independiente para corroborar su desempeño y su correcto funcionamiento en el
prototipo, posteriormente se llevo acabo el diseño del algoritmo de control difuso con
la técnica de Mamdani en LabVIEW para concluir en una interfaz grafica de la
simulación del sistema de control de pH que lleva acabo el proceso de neutralización
de una solución.
iv
Dedicatorias
A mis padres:
Sabiendo que jamás existirá una forma de agradecer en esta vida de lucha y superación constante, quiero expresarles que mis ideales, esfuerzos y logros son también suyos y constituyen el legado más grande que pudiera recibir.
Agradezco a esta gran institución educativa que es el Instituto Politécnico Nacional, en especial a la Escuela Superior de Ingeniera Mecánica y Eléctrica, Unidad Zacatenco, por formarnos como profesionistas en sus aulas y permitirnos realizar este sueño.
A la M. en C. Miriam Gomez Alvarez, el M. en C. Antonio Obregón Tenorio y el Ingeniero d r Pere or e r sesor rnos en re i i n de es esis ro or ion rnos sus o ser iones re is s er de nues ro r o r s oder me or r o e r o o de me or orm
posible.
Y al Ingeniero Eduardo Gibrain García Resendiz por su dedicación y esfuerzo en la realización de este trabajo.
Con cariño admiración y respeto Oscar Méndez López
El presente trabajo realizado con los esfuerzos de muchas personas, comenzado por profesores y alumnos, junto con personal de la ESIME Zacatenco del IPN y por supuesto del apoyo de familiares y amigos destinamos este proyecto para el empleo en el desarrollo y formacion de nuevas generaciones de Ingenieros de la querida y honorable Carrera de Ing. en Control y Automatizacion, porque finalmente, lo que un hombre busca en esta vida, es la manera de trascender y que mejor manera de hacerlo que por medio del conocimiento y tecnica plasmadas en este proyecto, que esperamos y sean de gran utilidad para el desarrollo de nuevos prototipos y trabajos de investigacion.
Este proyecto es dedicado a los alumnos del Instiuto Politecnico Nacional, para que se sirvan de un mejor Mexico.
v
Agradecimientos
Agradecer es estar en un estado de plenitud, porque nos permite estar satisfechos y bien con uno mismo y con nuestro entorno, por ello quiero brindarles honores y respeto a todos aquellos que son parte de esto, comenzado por mis Padres, y mi Abuela, también de dos mujeres que en este camino han sido como mi Madre, mi Tía y mi Hermana, aquellos Amigos de la carrera a los cuales aprecio demasiado, a los Amigos del lugar en donde viví y por supuesto a esta amada alma mater el IPN y a la ESIME Zacatenco en conjunto de todos los Profesores que me brindaron su conocimiento y me guiaron para concluir con mis estudios, a todos y todas porque es un cumulo de esfuerzos y este logro es de todos, mis más sinceras gracias por todo.
Y finalmente trabajare duro día a día para que en compañía de ustedes ya sea en presencia o en la distancia podamos cosechar más triunfo.
Índice de contenido
Resumen
iii
Dedicatorias
iv
Agradecimientos
v
Objetivo General
vi
Objetivos Particulares
vi
Justificación
vi
Capítulo I Marco Teórico 1
1.1 Estructura 2
1.2 Lenguajes de Programación 2
1.3 Historia 3
1.4 Generaciones de lenguajes de programación 2
1.5 Tipos de Lenguajes de Programación 3
1.6 Tipos de Programas 5
1.7 Desarrollo en sistemas de adquisición de datos 5
1.8 Reacción química 6
1.9 Concepto de ácido y base 7
1.10 Potencial de Hidrogeno (pH) 7
1.11 Neutralización 8
1.11.1 Historia de la Neutralización 8
1.12 Grado de avance de la reacción y afinidad 9
1.13 Rendimiento de una reacción 9
1.14 Principios históricos de sistemas de control 10
1.15 Control clásico vs control moderno 12
1.16 Teoría de control clásico 12
1.17 Teoría de control moderno 12
1.18 Controladores inteligentes 12
1.18.1 Redes neuronales 13
1.18.2 Algoritmos genéticos 13
1.18.3 Lógica difusa 13
1.19 Conjuntos difusos 13
1.20 Estructura de un controlador difuso 14
1.21.1 Función de saturación 16
1.21.2 Función hombro o saturación a la derecha 16
1.21.3 Función triangular 17
1.21.4 Función trapecio o PI 17
1.21.5 Fun i n si moid o “S” 18
1.22 Inferencia o base de conocimientos 19
1.23 Defuzificacion 19
1.23.1 Método del centro máximo 19
1.23.2 Método de medio máximo 19
1.23.3 Método de centro de área o gravedad 19
1.24 Análisis de sistemas de control 21
1.25 La computadora en el control de procesos industriales 21
Capítulo II Planteamiento del Problema 22
2.1 Planteamiento del problema 23
2.2 Análisis de equipos 24
2.3 Características de módulos Armfield PCT 16 24
2.4 Comparación de equipos 26
2.5 Artículos de control de pH 27
2.6 Importancia del pH en las industrias 29
2.7 Importancia del pH en aguas residuales 29
2.8 Tratamiento de aguas para entrada a calderas 30
2.9 Riego tecnificado y fertilizantes 31
2.10 Importancia del pH en la industria alimentaria 31
2.10.1 Industria cervecera 32
2.10.2 Industria lechera 32
2.10.3 Industria de las bebidas gasificadas 33
2.10.4 Industria azucarera 33
2.11 Control de pH en la Industria del etanol 34
Capítulo III Desarrollo del Prototipo para el Control de pH 35
3.1 Desarrollo del Prototipo de pH 36
3.2 Mesa de Trabajo 36
3.3 Tipos de bombas dosificación 38
3.3.1 Bomba peristáltica 38
3.4 Selección de Bomba 40
3.5 Características de la bomba 40
3.6 Tanque Agitado 42
3.6.1 Tipos de reactores químicos 42
3.7 Reactor batch 43
3.7.1 Características y principales del reactor químico tipo batch 43
3.8 Sistemas de Mezclado 44
3.9 Agitado de líquidos 45
3.10 Equipo utilizado en la agitación 45
3.11 Impulsores 46
3.11.1 Tipos de impulsor 46
3.11.2 Propelas 46
3.11.3 Paletas 47
3.11.4 Turbinas 48
3.12 Prevención de vortices y remolinos 49
3.13 Selección del reactor químico tipo batch 51
3.14 Selección del sistema de agitación 53
3.15 Motor 53
3.16 Propela 54
3.17 Depósitos 55
3.18 La variable analítica de pH 57
3.19 Métodos de Medición del pH 58
3.20 Sistema de transistor de efecto de campos electivo de iones (ISFET) 61
3.21 Selección del elemento sensor de pH 61
3.22 Características del sensor de pH ASP200-2-1M-BNC 62
3.23 Adaptador (CAS) pH/ORP 63
3.24 Adquisición de Datos 64
3.25 Tarjetas de adquisición de datos NI 65
3.26 Software para DAQ 65
3.27 Selección de DAQ 66
3.28 Características principales de NI USB-6008 66
3.29 Prototipo 67
Capítulo IV Control de pH 68
4.1.1 Conceptos 69
4.1.2 Clasificación de ácidos y bases 69
4.1.3 Propiedades de los ácidos y bases 70
4.1.4 Sales de bases fuertes solubles y ácidos fuertes 70
4.1.5 Sales de bases fuertes y ácidos débiles 70
4.1.6 Sales de bases débiles y ácidos fuertes 71
4.1.7 Sales de bases débiles y ácidos débiles 71
4.2 Reactivos 71
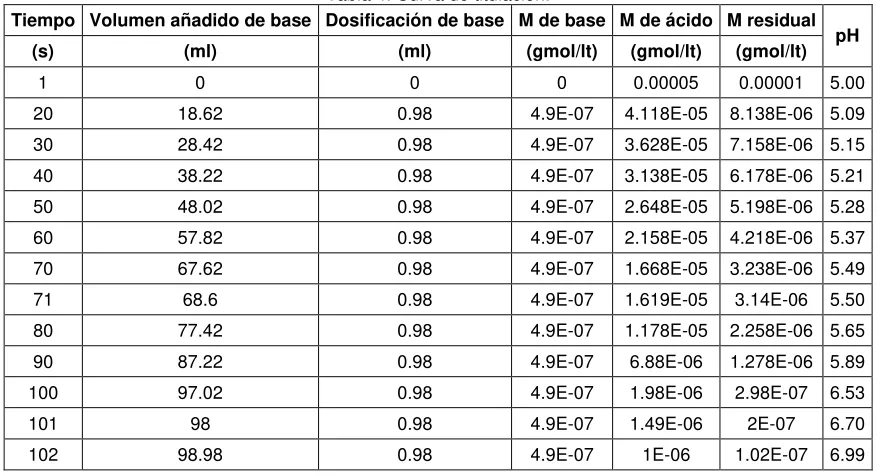
4.3 Curvas de titulación 72
4.4 Características del proceso de neutralización 73
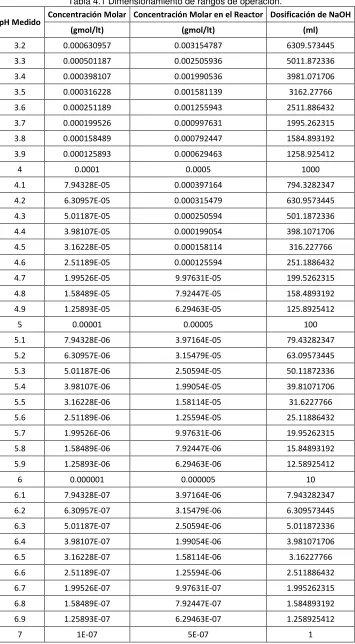
4.4 Rangos de operación 75
4.5 Modelado de la planta 77
4.5 Pruebas de dispositivos 79
4.5.1 Sensor de pH 79
4.8 Bomba dosificadora 82
4.9 Prueba de dosificación 82
4.10 Sistema de agitación por propela de dos aspas 84
4.10.1 Realización del circuito de potencia 85
4.11 VI de bloques con conexión con la tarjeta USB 6008 85
4.11.1 VI en panel frontal 86
4.12 Diseño del controlador 86
4.13 Fuzificacion 87
4.14 Base de conocimientos 91
4.15 Inferencia 92
4.16 Defuzificacion 93
4.17 Creación de la simulación 93
4.18 Diagrama de bloques 95
4.19 Panel Frontal 99
Capítulo V Implementación 103
5.1 Control de pH 104
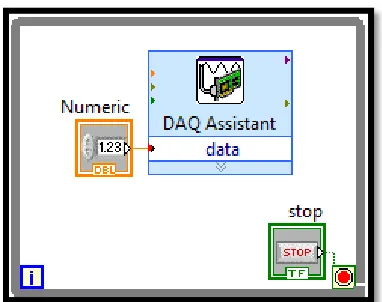
5.2 DAQ Assistant 106
5.2.1 DAQ Assitant del sensor de pH 112
5.2.2 Conexión a la USB 6008 112
5.2.4 DAQ Assitant del control de la bomba dosificadora 114
5.3 Conexión física 114
5.4 Resultados de la implementación 117
Capítulo VI Análisis de resultados 119
6.1 Conclusión 120
Referencias bibliográficas
vii
Índice de figuras
Figura 1.1 Lenguajes de Programación. 3
Figura 1.2 Código Fortran en una tarjeta perforada. 3
Figura 1.3 Programación en Lenguaje Grafico. 4
Figura 1.4 Tarjetas de Adquisición de Datos de NI. 6
Figura 1.5 Sistema de control de nivel. 10
Figura 1.7 Función de membresía. 15
Figura 1.8 Función hombro o de saturación a la izquierda. 16
Figura 1.9 Función hombro o saturación a la derecha. 16
Figura 1.10 Función triangular. 17
Figura 1.11 Función trapecio. 18
Figura 1.12 Función sigmoidal. 18
Figura 1.13 Funciones de membresía seccionadas. 20
Figura 2.1 Esquema de Armfield PCT 16 Control de pH. 25
Figura 2.2 DTI de Armfield PCT 16 Control de pH. 25
Figura 2.3 Armfield PCT 16 Control de pH. 26
Figura 2.4 Tratamiento de aguas residuales. 30
Figura 2.5 Riego tecnificado. 31
Figura 2.6 Industria Cervecera. 32
Figura 2.7 Industria Refresquera. 33
Figura 3.1 Mesa de trabajo. 36
Figura 3.2 Vista de mesa de trabajo frontal. 37
Figura 3.3 Mesa de trabajo real. 38
Figura 3.4 Bomba peristáltica. 39
Figura 3.5 Principio de funcionamiento de una bomba de membrana. 39
Figura 3.6 La bomba Pulsatron Serie MP. 41
Figura 3.7 Esquema del conjunto de accionamiento y el panel de control de la Serie MP. 41
Figura 3.8 Tanque Agitado. 42
Figura 3.9 Reactor Batch. 43
Figura 3.10 Disposición típica de un sistema de agitación. 45
Figura 3.11 Propelas. 47
Figura 3.12 Patrón de flujo formado por una propela en un tanque. 47
Figura 3.14 Diferentes tipos de turbinas. 49
Figura 3.15. Esquema de remolinos y vortices en un rector. 49
Figura 3.16 Primer método para evitar remolinos. 50
Figura 3.17 Método para tanques grandes. 50
Figura 3.18 Bafles en Reactor Grande. 51
Figura 3.19 Esquema de reactor químico tipo batch. 52
Figura 3.20 Reactor químico Batch. 53
Figura 3.21 Motor CA marca Jet Spray Corp. 54
Figura 3.22 Propela. 54
Figura 3.23 Sistema de agitación. 55
Figura 3.24 Esquema del deposito. 56
Figura 3.25 Deposito. 57
Figura 3.26 Escala del pH. 58
Figura 3.27 Sistema de electrodo de vidrio. 59
Figura 3.28 Analizador de dos electrodos. 60
Figura 3.29 Analizador de un electrodo 60
Figura 3.30 ISFET para medir PH. 61
Figura 3.31 Sensor de pH ASP200-2-1M-BNC. 63
Figura 3.32 Adaptador (CAS) pH/ORP. 63
Figura 3.33 Adquisición de datos. 64
Figura 3.34 Compatibilidad de DAQ con software. 65
Figura 3.35 NI USB-6008. 66
Figura 3.36 Prototipo 67
Figura 4.1 Curva de Titulación. 72
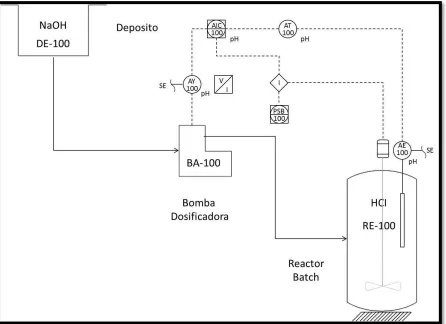
Figura 4.2 Diagrama de bloques del prototipo. 73
Figura 4.3 DTI 74
Figura 4.4 Respuesta del sistema. 79
Figura 4.5 soluciones buffer de pH=4 y pH=7. 80
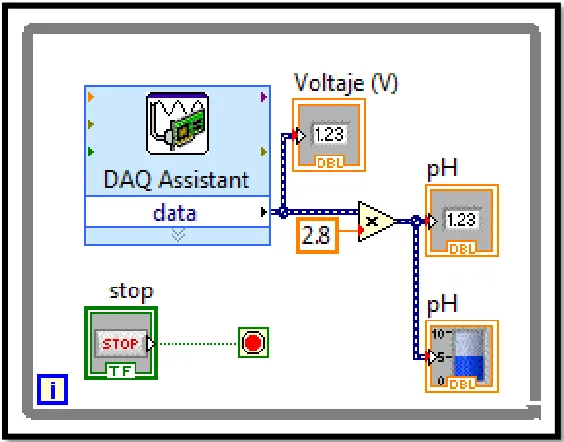
Figura 4.6 Diagrama VI de conexión a la USB 6008. 81
Figura 4.7 relación voltaje/pH 82
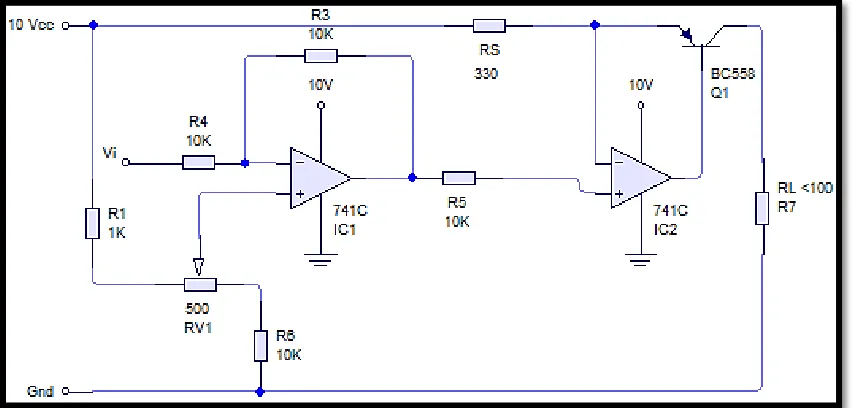
Figura 4.8 Convertidor de voltaje a corriente (fuente de corriente) con OPAM. 83
Figura 4.9 Fuente de voltaje con OPAM. 83
Figura 4.10 VI en diagrama de bloques. 84
Figura 4.12 Circuito de control del motos de CA. 85
Figura 4.13 Etapa de potencia para el motor. 85
Figura 4.14 VI del control on-off del motor en bloques. 86
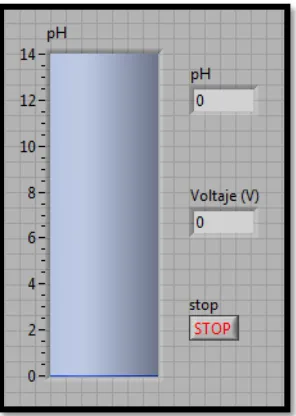
Figura 4.15 VI en panel frontal (on-off). 86
Figura 4.16 Conexión real. 86
Figura 4.17 Herramienta Fuzzy System Designer. 87
Figura 4.18 Declaración de las variables lingüísticas y funciones de membresía. 88
Figura 4.19 Respuesta del sistema. 89
Fi ur 4.20 De r i n de ri e in üís i “ rror” sus un iones de mem resí . 89 Fi ur 4.21 De r i n de ri e in üís i “De rror” sus m 90 Fi ur 4.22 De r i n de ri e in üís i “Vo e” sus un iones de mem resí . 90
Figura 4.23 Variables lingüísticas y funciones de membresía declaradas. 91
Figura 4.24 Declaración de reglas lingüísticas y método de inferencia. 91
Figura 4.25 Fuzzy System Designer. 93
Figura 4.26 LabVIEW 2010. 94
Figura 4.27 Componentes de un VI. 94
Figura 4.28 While Loop. 95
Figura 4.29 Arreglo para sistema difuso. 95
Figura 4.30 FL Fuzzy Controller. 96
Figura 4.31 Operaciones numéricas. 96
Figura 4.32 Tick Count. 97
Figura 4.33 Time Delay. 97
Figura 4.34 Repuesta del sistema. 98
Figura 4.35 Diagrama de bloques 98
Figura 4.36 Esquema de la planta. 99
Figura 4.37 Propiedades del indicador. 100
Figura 4.38 SP vs VC. 100
Figura 4.39 Bomba dosificadora. 101
Figura 4.40 Objetos. 101
Figura 4.41 Indicadores. 101
Figura 4.42 Interfaz grafica de simulación. 102
Figura 5.1 VI en diagrama de bloques de control de pH. 104
Figura 5.2 VI en panel frontal de control de pH. 105
Figura 5.4 Grafica de set point vs valor medido en unidad de tiempo. 106
Figura 5.5 Señal de voltaje de la bomba dosificadora por unidad de tiempo 106
Figura 5.6 Generación de un VI en blanco. 107
Figura 5.7 Ventanas de panel frontal y diagrama a bloques. 107
Figura 5.8 Como seleccionar el DAQ Assistant. 107
Figura 5.9 Selección de adquisición de señal. 108
Figura 5.10 Selección del puerto ao0 como entrada. 108
Figura 5.11 Rangos de operación de la entrada ao0. 109
Figura 5.12 Bloque DAQ Assistant. 109
Figura 5.13 Generación de un VI en blanco. 109
Figura 5.14 Ventanas de panel frontal y diagrama a bloques. 110
Figura 5.15 Como seleccionar el DAQ Assistant. 110
Figura 5.16 Selección de generación de señal. 110
Figura 5.17 Selección del puerto ao0 como entrada. 111
Figura 5.18 Rangos de operación de salida ao0. 111
Figura 5.19 Bloque DAQ Assistant. 111
Figura 5.20 DAQ Assistant del sensor de pH. 112
Figura 5.21 Selección de entrada analógica. 112
Figura 5.22 Conexión física de entrada en el puerto ai0. 113
Figura 5.23 DAQ Assistant de control on-off del agitador. 113
Figura 5.24 Selección de salida de 0-5 volts en el puerto ao0. 113
Figura 5.25 DAQ Assistant de control de dosificación. 114
Figura 5.26 Selección de salida regulada de 0-2.5v en el puerto ao1. 114
Figura 5.27 Prueba Sensor de pH. 115
Figura 5.28 Prueba del Agitador. 115
Figura 5.29 Prueba con la Bomba Dosificadora. 116
Figura 5.30 Prueba total con la tarjeta de adquisición de datos. 116
Figura 5.31 Vista frontal con elementos unidos. 117
Figura 5.33 Activación del flujo medio. 117
Figura 5.34 Activación de flujo mínimo. 118
Índice de tablas
Tabla 1.1 Tipos de Lenguajes de Programación. 4
Tabla 2.2 Tipos de reacción. 7
Tabla 2.1 Artículos de control difuso. 28
Tabla 3.1 Relaciones de pH. 58
Tabla 3.2 Características del sensor de pH ASP200-2-1M-BNC. 62
Tabla 3.3 Características del adaptador. 64
Tabla 3.4 Características del sensor de pH. 64
Tabla 3.5 Características del sensor de ORP. 64
Tabla 4.1 Dimensionamiento de rangos de operación. 76
Tabla 4. Curva de titulación. 78
Tabla 4.3 relación voltaje/pH. 81
vi
Objetivo General
Diseñar un prototipo de un reactor químico por lotes (Batch) a nivel laboratorio
empleando un sistema de control de pH con la utilización de
Tarjetas de
Adquisición de Datos (DAQ) y el lenguaje de programación grafica Laboratory
Virtual Instrument Engineering Workbech (LabVIEW) de
National Instruments
(NI) con fines didácticos en la carrera ICA de la ESIME.
Objetivos Particulares
Diseñar un prototipo de un reactor químico tipo Batch a nivel laboratorio.
Seleccionar la instrumentación y tarjeta de adquisición de datos adecuados
para el proceso.
Implementar un sistema de control de pH en el reactor químico.
Realizar una inducción al entorno de programación gráfica
LabVIEW para el
desarrollo de sistemas de control enfocados a cada una de las partes que
componen el sistema de control de pH.
Diseñar y analizar sistemas de control reales mediante su simulación con
Instrumentos Virtuales (VI) de LabVIEW.
vi
Justificación
Hoy en día en el Instituto Politécnico Nacional (IPN) enfrenta cada vez
mayores retos en la preparación de nuevos profesionistas, en un mundo
globalizado, por lo cual como parte del IPN la Escuela Superior de Ingeniería
Mecánica y Eléctrica (ESIME), forma profesionistas con una sólida formación
interdisciplinaria en ciencias aplicadas de la Ingeniería.
La ESIME en sus diferentes especialidades prepara Ingenieros en Control y
Automatización (ICA) orientada a la solución de problemas industriales en el
control de procesos, la automatización, la instrumentación, la aplicación de la
electrónica en sistemas analógicos y digitales.
Por estas razones es la importancia de utilizar herramientas de vanguardia
debido a un mundo industrializado en constante cambios tecnológicos. La
programación gráfica ha sido usada en universidades en todo el mundo para
el aprendizaje práctico, para mejorar las aplicaciones de investigación y para
impulsar la próxima generación de innovadores. Con la naturaleza intuitiva del
diseño de sistemas gráficos, los alumnos de la carrera en ICA de la ESIME
pueden diseñar, generar prototipos, desarrollar aplicaciones, simular y
controlar sistemas reales con lo cual se crea conocimiento teórico práctico.
Estas herramientas de programación gráfica consisten en un aprendizaje
dinámico y práctico con lo cual se reducen los tiempos, costos y la necesidad
de contar con equipos de instrumentación, control y electrónica que por su
complejidad no se cuentan en las instalaciones de ICA.
Para poder reunir los elementos de la programación grafica con el uso NI
LabVIEW y el de la Ingeniería en Control y Automatización se eligió el
procesos del control del potencial de hidrogeno (pH) el cual es un proceso
industrial importante para el control de los niveles del pH que presenten los
productos que son elaborados o las soluciones que serán utilizadas para
alguna parte de los procesos industriales.
1
En el siguiente capítulo, se muestra un panorama de conceptos,
métodos, términos y teorías relacionadas directamente con este
proyecto de ingeniería.
2
1.1 Estructura
Para el desarrollo del prototipo, es decir, el sistema de control de pH con tarjetas de adquisición de datos y programación en LabVIEW, es necesario un Marco Teórico el cual comprenda los aspectos conceptuales en los que se desenvuelve este proyecto de ingeniería. De manera general, en este capítulo se comprenden 3 secciones importantes que son dividas de la siguiente manera:
Sistema de Programación Sistema Químico
Sistema de Control
En cada una de estas etapas se explican los conceptos, métodos, términos y conocimientos necesarios para una buena compresión del tema. En el primer sistema, se verá los diferentes tipos de programación, así como también los tipos de leguajes, entre otros conceptos. Para la siguiente etapa, se define el concepto de pH, el tipo de reacciones y conceptos de ácido o base, entre otros. Finalmente en el tercer sistema se verá los conceptos relacionado con los sistemas de control. Estos serán presentados en el orden mencionado.
1.2 Lenguajes de Programación
Con la idea de facilitarnos las tareas que debemos de desempeñar los humanos han desarrollado diversas herramientas a lo largo de nuestra historia, que nos permiten tener una mejor calidad de vida.
Uno de estos inventos es el ordenador o computadora, el cual en sus tecnologías para su fabricación y explotación ha sufrido cambios drásticos a partir de la segunda mitad del siglo XX. Esta herramienta es decir la computadora conformada por cables y circuitos no es capaz por si sola de efectuar una tarea necesita recibir la instrucciones por parte de los humanos para desempeñar alguna tarea. Uno de los problemas es cómo vamos a poder hacer que un conjunto de circuitos desempeñen una determinada tarea y nos entreguen los resultados que nosotros esperamos, es decir, de qué manera se puede lograr la comunicación entre el hombre y el ordenador. [1]
La solución a este problema solo fue posible mediante un lenguaje de programación el cual es esta interfaz entre el usuario y la computadora la cual nos permite expresar las instrucciones que queremos que la computadora ejecute para realizar operaciones, tareas específicas, aplicaciones informáticas, software, entre otras. Estas funciones o procesos nos proveen de herramientas para el confort del ser humano; un ejemplo es el procesador de texto, que permite al usuario realizar todas las tareas concernientes a la edición de textos.
Los lenguajes de programación están compuestos principalmente por unas reglas de tipo semántico y sintáctico que lo definen como lenguaje informático. Pero esto no implica que un lenguaje de programación sea sinónimo de lenguaje informático. Sino que dentro del término lenguaje informático caben otros lenguajes que no son lenguajes de programación como es el caso del HyperText Markup Language (HTML).
3 actuaciones se deben tomar bajo unos determinados supuestos. Para lo cual los lenguajes de programación intentan estar lo más cercano posible al lenguaje humano o natural.
Los lenguajes de programación son programas escritos que pasan primero por un proceso de compilación. Compilar es traducir al lenguaje máquina. Este paso es necesario para que la computadora pueda entender nuestras peticiones. Después como segundo paso la computadora ejecuta y procesa los datos que le hemos dado teniendo el resultado deseado para el usuario. [2]
En la siguiente Figura 1.1 se muestran algunos de los lenguajes de programación más conocidos donde podemos citar a los siguientes:
Figura 1.1 Lenguajes de Programación.
ADA BASIC C Java
C++ Cobol Fortran LISP
Pascal PHP Perl
MATLAB
1.3 Historia
Para que la computadora entienda nuestras instrucciones debe usarse un lenguaje específico conocido como código máquina, el cual la máquina interpreta fácilmente, pero que lo hace excesivamente complicado para las personas. De hecho sólo consiste en cadenas extensas de números 0 y 1. En la siguiente Figura. 1.2 se muestra el código Fortran en una tarjeta perforada como leguaje o código maquina.
2 Para facilitar el trabajo, los primeros operadores de computadoras decidieron hacer un traductor para remplazar los 0 y 1 por palabras o abstracción de palabras y letras provenientes del inglés; éste se conoce como lenguaje ensamblador. Por ejemplo, para sumar se usa la letra A de la palabra inglesa add (sumar). El lenguaje ensamblador sigue la misma estructura del lenguaje máquina, pero las letras y palabras son más fáciles de recordar y entender que los números.
La necesidad de recordar secuencias de programación para las acciones usuales llevó a denominarlas con nombres fáciles de memorizar y asociar: ADD (sumar), SUB (restar), MUL (multiplicar), CALL (ejecutar subrutina), etc. A esta secuencia de posiciones se le denominó "instrucciones", y a este conjunto de instrucciones se le llamó lenguaje ensamblador. Posteriormente aparecieron diferentes lenguajes de programación, los cuales reciben su denominación porque tienen una estructura sintáctica similar a los lenguajes escritos por los humanos, denominados también lenguajes de alto nivel.
La primera programadora de computadora conocida fue Ada Lovelace, hija de Anabella Milbanke Byron y Lord Byron. Anabella introdujo en las matemáticas a Ada quien, después de conocer a Charles Babbage, tradujo y amplió una descripción de su máquina analítica. Incluso aunque Babbage nunca completó la construcción de cualquiera de sus máquinas, el trabajo que Ada realizó con éstas le hizo ganarse el título de primera programadora de computadoras del mundo. El nombre del lenguaje de programación Ada fue escogido como homenaje a esta programadora.
A finales de 1953, John Backus sometió una propuesta a sus superiores en IBM para desarrollar una alternativa más práctica al lenguaje ensamblador para programar la computadora central IBM 704. El histórico equipo Fortran de Backus consistió en los programadores Richard Goldberg, Sheldon F. Best, HarlanHerrick, Peter Sheridan, Roy Nutt, Robert Nelson, Irving Ziller, LoisHaibt y David Sayre. [3]
El primer manual para el lenguaje Fortran apareció en octubre de 1956, con el primer compilador Fortran entregado en abril de 1957. Esto era un compilador optimizado, porque los clientes eran reacios a usar un lenguaje de alto nivel a menos que su compilador pudiera generar código cuyo desempeño fuera comparable al de un código hecho a mano en lenguaje ensamblador.
En 1960, se creó COBOL, uno de los lenguajes usados aún en 2010 en informática de gestión.
A medida que la complejidad de las tareas que realizaban las computadoras aumentaba, se hizo necesario disponer de un método más eficiente para programarlas. Entonces, se crearon los lenguajes de alto nivel, como lo fue BASIC en las versiones introducidas en los micrordenadores de la década de 1980. Mientras que una tarea tan sencilla como sumar dos números puede necesitar varias instrucciones en lenguaje ensamblador, en un lenguaje de alto nivel bastará una sola sentencia.
1.4 Generaciones de lenguajes de programación
3 generaciones no coincidieron exactamente en el tiempo con las de hardware, pero sí de forma aproximada, y son las siguientes:
Primera generación: Los primeros ordenadores se programaban directamente en código binario, que puede representarse mediante secuencias de ceros y unos sistema binario. Cada modelo de ordenador tiene su propio código, por esa razón se llama lenguaje de máquina.
Segunda generación: Los lenguajes simbólicos, así mismo propios de la máquina, simplifican la escritura de las instrucciones y las hacen legibles en comparación con la primera generación.
Tercera generación: Los lenguajes de alto nivel sustituyen las instrucciones simbólicas por códigos independientes de la máquina, parecidas al lenguaje humano o al de las Matemáticas.
Cuarta generación: se ha dado este nombre a ciertas herramientas que permiten construir aplicaciones sencillas combinando piezas prefabricadas. Hoy se piensa que estas herramientas no son, propiamente hablando, lenguajes. Algunos proponen reservar el nombre de cuarta generación para la programación orientada a objetos.
Quinta generación: se llama así a veces a los lenguajes de la inteligencia artificial, aunque con el fracaso del proyecto japonés de la quinta generación el nombre ha caído en desuso. [4]
1.5 Tipos de Lenguajes de Programación
Los lenguajes de programación generalmente se dividen en dos grupos principales en base al procesamiento de sus comandos:
Lenguajes imperativos
Lenguajes funcionales
Un Lenguaje Imperativo funciona mediante una serie de comandos, agrupados en bloques y compuestos de órdenes condicionales que permiten al programa retornar a un bloque de comandos si se cumple la condición. Estos fueron los primeros lenguajes de programación en uso y aún hoy muchos lenguajes modernos usan este principio. No obstante, los lenguajes imperativos estructurados carecen de flexibilidad debido a la secuencialidad de las instrucciones.
Un Lenguaje de Programación Funcional o lenguaje de procedimiento es un lenguaje que crea programas mediante funciones, devuelve un nuevo estado de resultado y recibe como entrada el resultado de otras funciones. Cuando una función se invoca a sí misma, hablamos de recursividad.
El tipo de lenguaje funcional puede dividirse en grandes rasgos en dos tipos de lenguaje:
Lenguajes interpretados
4 Lenguajes interpretados: Un programa escrito en un lenguaje interpretado requiere de un programa auxiliar (el intérprete), que traduce los comandos de los programas según sea necesario.
Lenguajes compilados: Al escribir en este tipo de lenguaje se necesita un programa anexo llamado compilador el cual se encarga de traducir el código escrito y a la vez crea un archivo independiente que no necesita de ningún otro programa para ejecutarse así mismo. Este archivo se llama ejecutable.
A continuación se muestra la Tabla 1.1 con los diferentes tipos de lenguaje de programación dividida en tres secciones Lenguaje, Principal are de aplicación y Compilación:
Tabla 1.1 Tipos de Lenguajes de Programación.
Lenguaje Principal área de aplicación Compilado/interpretado
ADA Tiempo real Lenguaje compilado
BASIC Programación para fines educativos Lenguaje interpretado
C Programación de sistema Lenguaje compilado
C++ Programación de sistema orientado a objeto Lenguaje compilado
Cobol Administración Lenguaje compilado
Fortran Cálculo Lenguaje compilado
Java Programación orientada a Internet Lenguaje intermediario
MATLAB Cálculos matemáticos Lenguaje interpretado
Cálculos matemáticos Cálculos matemáticos Lenguaje interpretado LISP Inteligencia artificial Lenguaje intermediario
Pascal Educación Lenguaje compilado
Inteligencia artificial Inteligencia artificial Lenguaje interpretado Perl Procesamiento de cadenas de caracteres Lenguaje interpretado
Fuente: Modern Programming Languages: A Practical Introduction. [5]
Lenguaje G: Este tipo de lenguaje se diferencia de los demás ya que no está basado en texto, es más gráfico y se trabaja por medio de diagramas. Este tipo de lenguaje de programación fue creada por National Instruments (1976) para maquinas MAC, y salió al mercado por primera vez en 1986. Actualmente disponible para plataformas Windows, UNIX, MAC y LinuxAntes se utilizaba en dos productos de NI, LabVIEW y BridgeVIEW, posteriormente BridgeVIEW se convirtió en un módulo de LabVIEW (DSC) y ahora es LabVIEW el único programa que utiliza Lenguaje G. En la Figura 1.3 se muestra el logo de LabVIEW. [2]
5
1.6 Tipos de Programas
Existen muchos tipos de programas, pero dependiendo de las necesidades o problemáticas que se tenga se dará el método o técnica para su solución.
La estructura del programa es parte fundamental, ya que si esta cuenta con una buena organización permitirá una buena documentación interna, una claridad de errores en la compilación y así aumentar la productividad del programa.
En lo general existen 5 tipos de programación:
Programación modular: Este tipo de programación consiste en dividir un programa en módulos o subprogramas, con la finalidad de hacerlo más legible y manejable. Programación orientada a objetos: La programación orientada en objetos o POO
(OOP según sus siglas en inglés) usa objetos y sus interacciones para diseñar aplicaciones y programas informáticos. Se basa en varias técnicas como son herencia, abstracción, polimorfismo (clases) y encapsulamiento.
Programación concurrente: Ejecuta múltiples tareas a la vez de diferentes usuarios, por lo cual se vuelve tediosa, extensa y con poca rapidez.
Programación fundamental: Llama y declara funciones dentro de otras funciones de tipo aritmético. Su característica principal es que no usa variables, no tiene iteraciones y no usa estructuras. Solo usa funciones recursivas y definiciones de funciones.
Programación lógica: Depende de diferentes variables, datos, circunstancias o acciones y con ellas el ordenador puede dar soluciones inteligentes. Este tipo de programación es la utilizada en la inteligencia artificial. Está basada en teoría y cálculos matemáticos los cuales ya establecidos en el ordenador, toman decisiones y anticipan acciones o movimientos. [6]
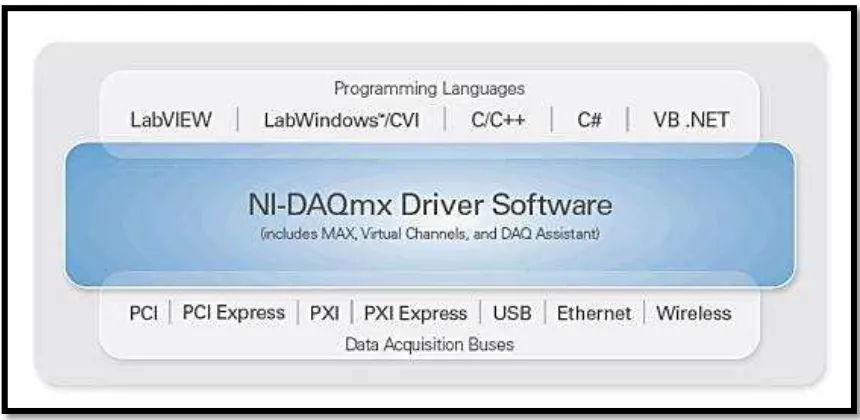
1.7 Desarrollo en sistemas de adquisición de datos
6
Figura 1.4 Tarjetas de Adquisición de Datos de NI.
1.8 Reacción química
Una reacción química o cambio químico es todo proceso químico en el cual dos o más sustancias (llamadas reactivos), por efecto de un factor energético, se transforman en otras sustancias llamadas productos. Esas sustancias pueden ser elementos o compuestos. Un ejemplo de reacción química es la formación de óxido de hierro producida al reaccionar el oxígeno del aire con el hierro. A la representación simbólica de las reacciones se les llama ecuaciones químicas. Los productos obtenidos a partir de ciertos tipos de reactivos dependen de las condiciones bajo las que se da la reacción química. No obstante, tras un estudio cuidadoso se comprueba que, aunque los productos pueden variar según cambien las condiciones, determinadas cantidades permanecen constantes en cualquier reacción química. Estas cantidades constantes, las magnitudes conservadas, incluyen el número de cada tipo de átomo presente, la carga eléctrica y la masa total. [7].
Los tipos de reacciones inorgánicas son: ácido-base (neutralización), combustión, solubilización, reacción de reducción-oxidación (redox) y precipitación.
Desde un punto de vista de la física se pueden postular dos grandes modelos para las reacciones químicas: reacciones ácido-base (sin cambios en los estados de oxidación) y reacciones redox (con cambios en los estados de oxidación). Sin embargo, podemos clasificarlas de acuerdo al tipo de productos que resulta de la reacción. Sin embargo, en esta clasificación entran las reacciones de síntesis (combinación), descomposición, de sustitución simple, de sustitución doble, que se muestran en la tabla 2.2 como tipos de reacción. [7]
7
Tabla 2.2 Tipos de reacción.
Nombre Descripción Representación Ejemplo
Reacción de síntesis Elementos o compuestos sencillos que se unen para formar un
compuesto más complejo.
La siguiente es la forma general que presentan este tipo de
reacciones:
A+B → AB
Donde A y B representan cualquier sustancia química.
Un ejemplo de este tipo de reacción es la síntesis del cloruro
de sodio:
2Na(s) + Cl2( ) →
2NaCl(s)
Reacción de
descomposición Un compuesto se fragmenta en elementos o compuestos más sencillos. En este tipo de reacción
un solo reactivo se convierte en zonas o productos.
AB → A+B
Donde A y B representan cualquier sustancia química.
Un ejemplo de este tipo de reacción es la descomposición del
agua:
2H2O( ) →
2H2(g) +
O2(g)
Reacción de desplazamiento o simple sustitución
Un elemento remplaza a otro en
un compuesto. A + BC → AC + B
Donde A, B y C representan cualquier sustancia química.
Un ejemplo de este tipo de reacción se evidencia cuando el hierro(Fe) desplaza al cobre(Cu) en el sulfato de cobre (CuSO4):
Fe + CuSO4 →
FeSO4 +
Cu
Reacción de doble desplazamiento o doble sustitución
Los iones en un compuesto cambian lugares con los iones de
otro compuesto para formar dos sustancias diferentes.
AB + CD → AD + BC
Donde A, B, C y D representan cualquier sustancia química.
NaOH + HC → NaCl + H2O
Fuente: Análisis Químico Cuantitativo. [7]
1.9 Concepto de ácido y base
Según el químico sueco Svante Arrhenius los ácidos son sustancias capaces de ionizarse en agua para formar iones hidrógeno (H+) y las bases o sustancias alcalinas son sustancias capaces de ionizarse en agua para ceder iones hidroxilo (OH-).
1.10 Potencial de Hidrogeno (pH)
8 Aplicando una definición matemá i se ex res n os érminos on un e r ‘ ’ minús u que n e one sím o o omo ‘ o ri mo ne i o de sím o o’. De es m ner e H es e negativo del logaritmo de la concentración molar de iones hidrógeno.
Hay que tener en cuenta que se trabaja con pH en lugar de pH3O debido a que el ion H3O es representado por H+. De esta manera:
[ ] [ ] (1.1)
Este término fue acuñado por el químico danés Sørensen, quien lo definió como el logaritmo negativo en base 10 de la actividad de los iones hidrógeno.
1.11 Neutralización
Dentro del ámbito de las reacciones químicas, es decir, los cambios químicos que ocurren cuando dos o más sustancias, por efecto de una causa energética, se transforman en otros productos. Se encuentra las reacciones de ácido-base o también llamadas reacciones de neutralización debido a que se mezcla un ácido y una base para llegar al punto deseado de acuerdo a la escala de medición del pH.
Cuando en la reacción participan un ácido fuerte y una base fuerte se obtiene sal y agua. Mientras que si una de las especies es de naturaleza débil se obtiene su respectiva especie conjugada y agua. Así pues, se puede decir que la neutralización es la combinación de cationes hidrógeno y de aniones hidróxido para formar moléculas de agua. Durante este proceso se forma una sal.
Las reacciones de neutralización son generalmente exotérmicas, lo que significa que desprenden energía en forma de calor. Generalmente las reacciones de neutralización son de la siguiente forma:
(1.2)
En la actualidad existen también métodos para llevar acabo estos procesos de neutralización mediante métodos electroquímicos como el uso de un pHmetro o la conductimétria.
1.11.1 Historia de la Neutralización
Los conocimientos modernos de los ácidos, bases parten de 1834, cuando el físico ingles Michael Faraday descubrió que ácidos, bases y sales eran electrolitos por lo que, disueltos en agua se disocian en partículas con carga o iones que pueden conducir la corriente eléctrica. En 1884, el químico sueco Svante Arrhenius definió una base como una sustancia que disuelta en agua producía un exceso de iones hidroxilo, OH-, mas tarde el químico alemán Wilhelm Ostwald definio loa ácidos como sustancias químicas que contenían hidrogeno, y que disueltas en agua producían una concentración de iones hidrogeno o protones, mayor que la existente en el agua pura en estado liquido. Entonces, la reacción de neutralización seria:
9 La teoría de Arrhenius y Ostwald ha sido objeto de críticas. La primera se fundamenta en que, es que el concepto de ácidos se limita a especies químicas que contienen hidrogeno y el de base a las especies que contienen hidroxilo. Por otra parte, la segunda es que la teoría solo se refiere a disoluciones acuosas, cuando en realidad se conocen muchas reacciones ácido-base que tiene lugar en ausencia de agua parcialmente o total.
Como por ejemplo, el amoniaco líquido, que actúa como una base en una disolución acuosa, se comporta como un ácido en ausencia de agua cediendo un protón a una base y dando lugar al anión, ion negativo, amida:
(1.4)
Una teoría mas satisfactoria es la que formularon en 1923 el químico danés Johannes Bronsted y, al mismo tiempo, el químico británico Thomas Lowry. Esta teoría habla que los ácidos son sustancias capaces de ceder protones, iones hidrogeno H+ y las bases sustancias capaces de aceptarlas. Aun se contempla la presencia de hidrogeno en el ácido, pero ya no se necesita un medio acuoso.
1.12 Grado de avance de la reacción y afinidad
Desde el punto de vista de la física, representamos a la reacción como:
∑
[
]
(1.5)T que i son los coeficientes estequiométricos de la reacción, que pueden ser positivos (productos) o negativos (reactivos). La ecuación presenta dos formas posibles de estar químicamente la naturaleza (como suma de productos o como suma de reactivos).
Si dmi es la masa del producto que aparece, o del reactivo que desaparece, resulta que:
{
}
(1.6)
Constante . Mi serí m s mo e u r de om ues o orres ondien e se denomin grado de avance. Este concepto es importante pues es el único grado de libertad en la reacción.
Cuando existe un equilibrio en la reacción, la entalpía libre es un mínimo, por lo que:
∑
(1.7)
Nos lleva a que la afinidad química es nula.
1.13 Rendimiento de una reacción
10 reaccionen, la recuperación del 100% de la muestra es prácticamente imposible. El rendimiento de una reacción se calcula mediante la siguiente fórmula:
(1.8)
Cuando uno de los reactivos esté en exceso, el rendimiento deberá calcularse respecto al reactivo limitante. Y el rendimiento depende del calor que expone la reacción.
1.14 Principios históricos de sistemas de control
En este apartado se dará una descripción de la evolución histórica y la situación actual de la Ingeniería de control, y mostrara un pequeño repaso de la evolución histórica de la Ingeniería de control.Desde que el ser humano evoluciono al sedentarismo, tuvo la necesidad de crear instrumentos que le permitieran sobrevivir a las adversidades del ambiente en que se alojaba.
Esto ocasiono la creación de nuevos instrumentos que realizaran acciones propias a las necesidades por la cual fueron creadas, hasta llegar al punto en el que le dieran al ser humano, su creador, comodidades para las actividades que desempeñaba.
La evolución del ser humano y la innovación de los instrumentos nos dio la capacidad de convivir y entender el entorno que nos rodea, hasta el punto de poder darles una magnitud y una escala. Ejemplo de esto es el reloj de agua llamado Clepsydra creado en la Antigua Grecia por el mecánico Ktesibios en el siglo III antes de Cristo. El Clepsydra consistía en un mecanismo cuyo objetivo era que el nivel del depósito del agua subiera con una velocidad constante, por medio de un pequeño chorro de agua dentro de un recipiente que contenía un flotador que subía a medida que el tiempo transcurría. Este mecanismo tendía a fallar ya que no se tenía un control en el flujo de entrada.
Ktsibios resolvió este problema al diseñar una válvula flotante que consistía en un recipiente con un flotador que se colocaba entre el suministro del agua y el depósito. La función de esta válvula era que si aumentaba el suministro de agua, el flotador se elevaba restringiendo el caudal de agua a la entrada del depósito. Tiempo después esto fue mejorado por Arabia y su función fue para mantener constante el nivel de agua en los bebederos. En la siguiente Figura 1.5 se muestra un esquema del sistema de control de nivel de Kitsibios.
11 En el renacimiento se encontraron aplicaciones técnicas del vapor. En 1660 el Marqués de Worcester diseñó un "motor conducido por agua", la semilla de la máquina de vapor. Tiempo después, el francés Denis Papin diseñaba una máquina de vapor donde la presión atmosférica jugaba un papel decisivo.
Al mismo tiempo que Watt se dedicaba a perfeccionar un regulador de bolas, Laplace y Fourier desarrollaban los métodos de Transformación Matemática, tan utilizados y asumidos en la Ingeniería Eléctrica y por supuesto en la actual Ingeniería de Control.
Cauchy (1789-1857), con su teoría de la variable compleja, completo las bases matemáticas necesarias para la Ingeniería de Control. Pero hasta 75 años después de la muerte de Cauchy, no surgió lo que se podría denominar la Teoría de Control.
Entre los primeros científicos interesados en el tema, se puede señalar a G.B. Airy, el cual en 1840 y 1851 pública sus trabajos relativos a la regulación de velocidad de telescopios [Airy 1840]. Su interés se debió a la necesidad de mantener el telescopio girando lentamente a una velocidad uniforme durante las observaciones astronómicas. La principal aportación de sus trabajos el estudio de la influencia del amortiguamiento en la estabilidad.
El problema fue resuelto por Maxwell y por el ingeniero ruso Vischnegradsky. Este ingeniero publicó sus resultados en términos de una regla de diseño que relacionaba los parámetros de ingeniería del sistema con su estabilidad.
El análisis de Vischnegradsky demostraba que los cambios de diseño de la máquina que habían tenido lugar desde la época de Watt, habían disminuido el rozamiento entre sus componentes y esto conllevaba inevitablemente el fenómeno de oscilaciones en la regulación de la velocidad. Vischnegradsky también demostró la incapacidad de un regulador proporcional para establecer un correcto comportamiento de un sistema de tercer orden.
El trabajo que presenta Maxwell en 1868: "On Governors", puede considerarse como el origen de la Teoría de Control. En él presenta su criterio de estabilidad para sistemas lineales dinámicos e invariantes. En este trabajo Maxwell establece una diferenciación entre los conocidos actualmente como reguladores proporcionales y los reguladores con acción integral.
Maxwell plantea de esta forma el problema general de estudiar la estabilidad de un sistema dinámico en función de la localización de las raíces de su ecuación característica. Hermite había publicado un trabajo sobre el mismo problema unos años antes pero no era muy conocido.
En 1889, Liapunov presenta sus trabajos sobre estabilidad, los cuales servirán de base a la teoría moderna de control.
La importancia del control automático durante el final del siglo XIX y comienzos del XX se pone de manifiesto con la concesión en 1912 del Premio Nobel de Física al sueco Dalen por su desarrollo de reguladores automáticos que se utilizan conjuntamente con los acumuladores de gas para balizas luminosas.
12
1.15 Control clásico vs control moderno
La aplicación de control clásico en algún proceso se realiza con la finalidad de que su análisis resulte simple, de modo que se aplicaran a sistemas lineales o linealizables por medio de técnicas de análisis de estabilidad como son Diagramas de Nyquis, Lugar geométrico de la raíz, diagramas de bode entre otras.
El surgimiento de la llamada Teoría moderna de control permitió describir adecuadamente la dinámica del proceso a controlar, esto en base al análisis de sistemas en dominio de las variables de estado, es decir, de un conjunto mínimo de variables del proceso que permitan describir su dinámica.
La teoría moderna de control dio origen a nuevas técnicas como son: El control optimo, El control multivariable, Control de sistemas estocásticos, Control adaptivo, Control no lineal y Control robusto, métodos que permiten abordar sistemas de mayor complejidad, que pueden tener múltiples entradas y salidas. [9]
1.16 Teoría de control clásico
La teoría de control clásica utiliza el concepto de función de transferencia, para realizar el análisis y el diseño en el dominio de s y/o en el dominio de la frecuencia. Esto es bueno para sistemas de control de una entrada y una salida, sin embargo no puede mejorar sistemas de control de múltiples entradas y múltiples salidas ya que esto es un requisito fundamental en un sistema de control.
1.17 Teoría de control moderno
Esta basada en el concepto del espacio de estado, en esta técnica se emplea el Algebra lineal matricial, el análisis y el diseño en el dominio del tiempo.
1.18 Controladores inteligentes
13 El control inteligente es un campo dentro de la disciplina del control y su desarrollo se da en base a características importantes del ser humano como la adaptación y aprendizaje, acción bajo incertidumbre y control bajo gran cantidad de datos.
Un sistema de control inteligente debe ser autónomo, es decir que tenga las características para autogobernarse. Las áreas que comprenden un control inteligente son:
Redes Neuronales. Algoritmos Genéticos Control Difuso.
1.18.1 Redes neuronales
Las redes neuronales tratan de reproducir el proceso de solución de problemas del cerebro, esto imitando el proceso de aprendizaje del ser humano en base a los conocimientos ganados con la experiencia a nuevos problemas o situaciones. Una red neuronal toma como ejemplo un problema resuelto, para la construcción de un sistema que tome decisiones y realiza clasificaciones. A este proceso se le conoce como entrenamiento de la red neuronal y es adecuada cuando se requiere algoritmos extensos como lo es el reconocimiento de imágenes.
1.18.2 Algoritmos genéticos
En cuanto a los algoritmos genéticos son considerados como una técnica de búsqueda iterativa inspirada en los principios de selección natural. Los algoritmos genéticos o AG no buscan modelar la evolución biológica sino hallar estrategias de optimización. Muchos problemas tienen funciones objetivo complejas y la optimización tiende a hallar el máximo o mínimo que dará pie a la mejor solución.
1.18.3 Lógica difusa
La lógica difusa o permite trabajar a los sistemas con información que no es exacta o imprecisa y que es contrario a la lógica tradicional que trabaja con información definida y precisa.
1.19 Conjuntos difusos
Hoy en día una alternativa útil en la realización de control sobre un sistema es el control difuso. Esta alternativa permite, mediante el conocimiento experto de una o varias personas, generar una base de conocimientos que dará al sistema la capacidad de tomar decisiones sobre ciertas acciones que se presenten en su funcionamiento.
14 flexibilidad, que el control clásico no permite al requerir un alto grado de cálculos matemáticos. Así al desarrollar un control difuso es posible desentenderse de la rigidez matemática y transmitir el razonamiento humano hacia un sistema de control.
Un controlador difuso se da en base a la lógica difusa, la cual fue presentada alrededor de 1965 por Lofti Asker Zadeh, profesor de la Universidad de California en Berkley. Lofti Zadeh es famoso por introducir la teoría de conjuntos difusos o lógica difusa la cual sienta las bases de una nueva forma de lógica. Zadeh muestra que el ser humano tiene dificultad para tomar decisiones cuando se tiene información imprecisa. La lógica difusa es una herramienta flexible creada para emular la lógica humana y tomar decisiones acertadas a pesar de la información con la que se cuente. Un ejemplo de esto son las tareas que se realizan a diario en el entorno que nos rodea, caminar por la calle sin chocar contra personas y objetos o estacionar un automóvil, ya que no se manejan modelos matemáticos o información cuantitativa, sino un control altamente adaptivo.
La lógica difusa puede representar la lógica humana, por ejemplo en afirmaciones tales como “e dí es á mu uroso” o “e u om i mu rá ido”. s s irm iones nos indican que la temperatura y velocidad respectivamente son altas pero no se sabe que cantidad expresan exactamente.
La lógica difusa se fundamenta en principios matemáticos basados en el grado de membrecía o pertenencia, cuya función es modelar información en el rango de 0 a 1, al cual se le asocia con un determinado valor lingüístico que está definido por una etiqueta, palabra o adjetivo dentro de un conjunto difuso.
Un conjunto difuso se escribe con una tilde arriba del nombre del conjunto para diferenciarlo de un conjunto real como se muestra a continuación:
(1.9)
Donde (x) es la función de pertenencia y está en el intervalo entre 0 a 1 y determina el grado de pertenencia de la variable x y U es el universo en discurso.
Esta lógica se basa en reglas lingüísticas dictadas por expertos., por ejemplo la velocidad de un automóvil es una variable que puede tomar distintos valores in üís i os, omo “A ”, “ edi ”, “B ” es s ri es es rán re id s or re s que di r n s id de sistema.
Ahora ¿Porque utilizar un control difuso?, si se quisiera automatizar un proceso que controla un trabajador se tendrá que emular a dicho trabajador, para esto se tendrá que tomar en cuenta que dicho trabajador toma decisiones en base a su criterio y experiencia y que estas de isiones se d n en orm in üís i omo “A o”, “Len o”, e . Se uede no r que un sistema de control clásico no permite este tipo de entradas, mientras que un sistema difuso si lo hace.
1.20 Estructura de un controlador difuso
15 en reglas que usan variables lingüísticas y en base a ellas se tomara la acción de control que será la salida del sistema. La estructura de un controlador difuso se muestra en la Figura 1.6.
Figura 1.6 Estructura de un controlador difuso.
1.21 Fuzificacion
La Figura 1.9 muestra un primer bloque llamado Fuzificacion, en el cual los datos de entrada realizaran un nexo entre variables reales y difusas para así ser mapeadas para calcular el grado de membresía que tendrán dentro del controlador. Un ejemplo de una función de membresía o pertenencia de un elemento X en un conjunto difuso es el propuesto en la Figura 1.7.
Figura 1.7 Función de membresía.
16
1.21.1 Función de saturación
Es la más sencilla de ellas, nos ayuda a describir situaciones en donde se alcanza un nivel máximo a partir de cierto punto. En la Figura 1.8 se muestra la grafica de la función de membresía que tiene un valor 0 en el punto -1 y después crece con pendiente constante hasta alcanzar el valor de 1 en el punto 0.
Figura 1.8 Función hombro o de saturación a la izquierda.
{
(1.10)
1.21.2 Función hombro o saturación a la derecha
Es la contraparte de la función de saturación. La Figura 1.9 muestra que se inicia en el valor 1 y desciende con una pendiente constante hasta alcanzar el valor de 0.
17
{
(1.11)
1.21.3 Función triangular
Como su nombre lo indica esta función de membresía consta de una pendiente positiva que se prolonga de manera constante hasta alcanzar el valor 1 y una vez que lo logra desciende de manera constante hasta el valor 0. En la Figura 1.10 muestra un ejemplo de esta función la cual tiene su inicio en el punto 5 y terminan en 15, teniendo su pico y valor unitario en el punto 10. Este tipo de funciones son adecuadas para definir situaciones en la que se tiene un valor óptimo, pero este aumenta o disminuye de manera rápida.
Figura 1.10 Función triangular.
{
(1.12)
1.21.4 Función trapecio o PI
18
Figura 1.11 Función trapecio.
{
(1.13)
1.21.5 Función sigmoidal o “S”
Por último, tenemos a la función sigmoidal la cual es similar a la de saturación, con la diferencia que su pendiente no crece de manera constante. En la Figura 1.12 se muestra la función sigmoidal.
Figura 1.12 Función sigmoidal.
{
19
1.22 Inferencia o base de conocimientos
Este bloque contiene toda la información registrada de situaciones que se pueden presentar dentro de un sistema o proceso a controlar así como las posibles acciones de control.
Consta de una base de datos y una base de reglas lingüísticas las cuales definen la manipulación de datos difusos y métodos de control que utilizan los expertos para llevar a cabo el control, empleando preposiciones.
Este bloque debe ser capaz de actuar en diferentes estados del proceso que se desee controlar. Por ejemplo supongamos el punto de operación de una grúa con la metodología siguiente:
“Si un rú h n do ur o e i o r no os i , nin un o en i se de e i r mo or”
Esto se puede formular como una producción de regla difusa.
(1.15)
Una vez que se han establecido un conjunto de reglas inequívocas, se puede definir un comportamiento más detallado de la grúa.
1.23 Defuzificacion
En este bloque se obtiene la acción de control real a partir de la acción de control difusa.
Algunos métodos empleados para encontrar el valor real a partir de valores difusos son los siguientes.
1.23.1 Método del centro máximo
Es un método sencillo. Se usa para la mayoría de las aplicaciones de la lógica difusa, debido a que se puede evaluar más de un término de salida.
1.23.2 Método de medio máximo
Este método calcula una salida del sistema solo para el término con el grado de validez resultante más alta. Si este máximo no es único, por ejemplo en una función de pertenencia tipo Pi o trapezoidal, se computa el término medio del máximo intervalo.
1.23.3 Método de centro de área o gravedad
20 Discreta:
∑
∑
(1.16)
O continúa:
∫
∫
(1.17)
Su metodología es sencilla, segmenta la función de membresía seleccionando puntos significativos de la superficie total obtenida, estos puntos representan a elementos del conjunto difuso de la variable lingüística de salida, se sobreponen todas estas áreas y se saca el centroide de la superposición, la cual nos dice la salida real del sistema.
Figura 1.13 Funciones de membresía seccionadas.
En la Figura 1.13 se muestra las funciones de membresía de un conjunto difuso el cual representa la velocidad de un motor.
Ahora calculando la centroide del área sombreada tomando los siguientes puntos significativos:
̃ ̃ ̃
̃ (1.18)
El centro de gravedad se obtiene de la siguiente manera, siendo los puntos a observar de manera discreta:
∑ ∑ (1.19)
Por lo tanto, el centroide está en 0.97 y su salida real será de:
21
1.24 Análisis de sistemas de control
Al análisis de un sistema de control se entiende como la investigación, bajo condiciones especificas, del comportamiento del sistema cuyo modelo matemático se conoce.
Este análisis debe de comenzar con una descripción matemática de cada componente, una vez elaborado este modelado, la forma en el que se analizara es depende de si es sistema físico es neumático, eléctrico, mecánico, etc.
El análisis en respuesta transitoria es la determinación de la respuesta de una planta a señales y perturbaciones de entrada.
El análisis de respuesta en estado estacionario es la determinación de la respuesta tras la desaparición de la respuesta transitoria.
1.25 La computadora en el control de procesos industriales
22
En el siguiente capítulo, se tocara los lineamientos del problema en
este proyecto de ingeniería, así como un enfoque con aplicaciones
industriales y las referencias científicas relacionadas con el prototipo
implementado.
Capítulo II
Planteamiento del
23
2.1 Planteamiento del problema
Siempre se ha sabido acerca de la importancia que tiene la educación para el progreso y el desarrollo de las naciones. Por experiencia se sabe que la educación superior es necesaria para el desarrollo pleno y sustentable del país. Es relevante para el desarrollo de una nación ya que las riquezas de un país se miden en el número de profesionista con los que cuenta.
La educación superior es uno de los pilares del desarrollo en sociedades como en el de procesos de transformación. El surgimiento de sociedades basadas en el conocimiento y la relevancia que adquiere la conformación de comunidades cada vez más educadas y formadas para enfrentar, las nuevas exigencias de un entorno mundial caracterizado por la polarización creciente entre países ricos y pobres, son factores que inducen al cambio en las formas de operar de las universidades y demás instituciones de educación superior. [11]
Hoy día el tema del financiamiento de la educación superior adquiere relevancia en los debates políticos sobre el futuro no sólo de nuestras universidades, institutos tecnológicos y centros de investigación, sino del país en su conjunto, dado el papel estratégico que éstos tienen en el desarrollo de la sociedad en todos sus campos. En todo el mundo los gobiernos nacionales, los organismos internacionales, las asociaciones de universidades, las instituciones de educación superior y las organizaciones políticas y sociales coinciden en que la educación terciaria es estratégica para el desarrollo de un país. También coinciden en que esta importancia debe reflejarse en la asignación de un financiamiento suficiente por parte de la sociedad. [12]
Dentro del presupuesto entra el problema de infraestructura física de las instituciones de estudios superiores ya que el presupuesto que se les da anualmente a estas casas de estudio los rectores no la usan para mejorar la deteriorada estructura de las instalaciones de las universidades públicas viéndose afectados los estudiantes ya que no pueden recibir clases en aulas con condiciones precarias, también las bibliotecas, los baños se ven afectados. La mayoría de nuestras universidades siguen laborando en las mismas es ru ur s desde su und i nν s ener iones os eriores se h n imi do “ in r rre r”, mu o o se h in er ido en m liación y reacondicionamientos.
El financiamiento a la educación superior, por tanto, no debe ser considerado como un gasto sino como una inversión. La mejor inversión de un país es aquella que se hace en su gente; es la que forma a las personas desde la educación inicial hasta la educación terciaria; es una inversión económica y social que debe protegerse de los embates de las crisis recurrentes que sufrimos como país.
Las instituciones de educación superior, en el momento actual, deben hacer frente a grandes desafíos como son mejorar la calidad y pertinencia de sus programas académicos, diversificar su oferta educativa y flexibilizar sus programas de estudio para dar respuesta a los requerimientos crecientes de la sociedad por una educación de mayor calidad y pertinencia.