ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA
Y ELECTRICA
“
BRAZO ROBOTICO”
TESIS PROFESIONAL
Para obtener el título de
INGENIERO EN COMUNICACIONES Y
ELECTRÒNICA
PRESENTAN
DANIEL PINEDA MENDEZ
HECTOR ZEPEDA PEREZ
OSCAR MARTINES JUAREZ
ASESORES DE TESIS
ING.ERASMO VALVERDE TRUJILLO
DR. CARLOS VAZQUEZ AGUILERA
UNIDAD PROFESIONAL "ADOLFO LOPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN COMUNICACIONES Y ELECTRÓNICA POR LA OPCION DE TITULACION TESIS COLECTIVA y EXAMEN ORAL INDIVIDUAL
DEBERA(N) DESARROLLAR C. HECTOR MIGUEL ZEPEDA PEREZ
C. DANIEL PINEDA MENDEZ C. OSCAR MARTINEZ JUAREZ
"BRAZO ROBOTICO CONTROLADO A DISTANCIA"
DESARROLLO DE
• FUNDAMENTOS E I.:,A ROBOTICA
• CINEMATICA DE ROBOTS MANIPULADORES • DESARROLLO
• POSIBLES MEJORAS AL MANIPULADOR
MÉXICO D.F. A 24 DE JUNIO DE 2011.
ASESORES
」セ
({r--(/.
ING. ERA" DR. C VAZQUEZ AGUILERA
A.
セ
'\ャiャIエjNセ
セT
+<1:,セ ... ..¡)'::- セO ('!
セ GNLNᄀセ セ
セN {...'"<:" l ' セ
el " . .,.. •.
]]セ セLN[NNNセ
.e; d ... -:-;...
d.. ..,1 . • . ,... '"'" 0,1#.
M. EN C. SALVADOR CA NE' G,.ONZÁLEZ JEFE DEL DEPARTAMEN acadeQセヲャcVdeG セ INGENIERÍA EN COMUNICACI ES Y EL IUJM. A
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
Agradecimiento:
A mi familia:
A mis padres porque me han apoyado en todo para alcanzar mis objetivos, cuyo espíritu y actitud de
independencia y superación me han servido de ejemplo para ser cada día mejor.
A mis hermanos porque son parte fundamental de mí alrededor y me sirven de inspiración para seguir adelante.
A mis compañeros y amigos:
A las personas que conocí durante el curso de la carrera y que incontables veces me facilitaron su ayuda para y apoyaron para cumplir con mis metas.
A mis profesores:
Que son un pilar de mi formación no solo académica, sino también personal, ayudándome a corregir mis errores y guiándome en sendero del conocimiento.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
Agradecimiento:
A mi familia:
A mis padres, ya que gracias a su apoyo incondicional en todo
momento, eh logrado cumplir mis objetivos y metas. Y que gracias a sus consejos me han dado la fuerza para seguir adelante día con día, y ser con ello una mejor persona.
A mi hermana que gracias a su ejemplo me motivo a seguir adelante en mis estudios y concluirlos satisfactoriamente, además de ser una parte muy importante dentro de mi.
A mis compañeros y amigos:
Que durante estos 4 años y medio estuvieron con migo en las buenas y en las malas, apoyándome para salir adelante, y no dejarme caer. Dándome consejos cuando los necesitaba y a sus enseñanzas que fueron herramientas de gran utilidad.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
Agradecimiento:
En el desarrollo de este trabajo es necesario hacer mención que esto no hubiese sido posible sin la intervención de un cierto número bien definido de personas, las cuales, a lo largo de la carrera fueron la base de mi motivación académica, de las ganas por la superación constante de cada día.
A mi familia.
Primeramente a mis padres, quienes fueron mi soporte fundamental, gracias a su apoyo moral y económico durante mi estancia en ESIME y por todo lo que continúe, gracias a su esfuerzo y preocupación porque yo lograra terminar esta carrera, ya que sin su apoyo esto no sería posible. A mi hermano, por ser mi compañero y amigo mas cercano en este camino, que no fue nada fácil de seguir y poder llegar al final.
A mis profesores.
Entrando ya en materia académica quedan ya solo 2 grupos de personas, el primero, al grupo de profesores con los cuales tome clases y de algunos no, pero que afortunadamente conocí de otra forma, gracias a todos ellos que me compartieron mucho o poco de los conocimientos con los que cuentan para así poder míos esos conocimientos y agregarles más y mejor información cada vez. Gracias a la preocupación real de algunos por el hecho de saber que realmente estábamos aprendiendo. De igual forma a los que permitieron que el trato de alumno – profesor no se quedara solo eso sino más bien un trato como de amigos, claro está sin perder el respeto. A las veces que después de reprobar un examen molestarlos varios días más para asesorías, a los que me dieron las bases para ponerme a nivel de los demás en los primeros semestres dado que yo no provengo de vocacional, a todos ellos muchas gracias.
A mis compañeros y amigos.
Y el último grupo que me queda por agradecer es al grupo de compañeros y amigos que me acompañaron y estuvieron con migo en las buenas y en las malas a lo largo de estos 9 semestres, a ellos que no me abandonaron al saber que no logre pasar alguna materia, o al saber que alguna practica de laboratorio no quedaba, a los que tuvieron que darme todo un curso intensivo de alguna materia porque yo no entendía nada, gracias también a los que hicieron que viera que mi nivel estaba muy bajo cuando yo creía lo contrario, a los que me corrigieron cuando algo estaba haciendo mal. A las veces que mi equipo de trabajo me llamo la atención al ver que o no trabajaba, llegaba tarde o no entregaba trabajos o tareas, gracias a todos ellos es que es posible también, hoy estar terminando y presentando este trabajo. Muchas gracias a todos ellos.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
INDICE
CAPITULO I FUNDAMENTOS DE ROBÓ
TICA……….1
1.1 INTRODUCCIÓN A LA ROBÓTICA…..……… 1
1.2 ANTECEDENTES HISTÓRICOS DE LA ROBÓTICA....…………...………....2
1.3 SIGINIFICADO DE ROBOT…...………...….………..….4
1.4 CLASIFICACIÓN DE ROBOTS MANIPULADORES…..……… 6
1.4.1 SISTEMA COMUN DE CINEMÁTICA DE MANIPULADORES………..…..8
1.4.1.1 Manipulador articulado (RRR)………..… 8
1.4.1.2 Manipulador esférico (RRP)………....9
1.4.1.3 Manipulador SCARA (RRP)………...10
1.4.1.4 Manipulador cilíndrico (RPP)………....11
1.4.1.5 Manipulador cartesiano………..12
1.4.1.6 Manipulador paralelo………13
1.5 ROBÓTICA INDUSTRIAL………..……….….13
1.5.1 DEFINICIONES DE ROBOTICA INDUSTRIAL ………...14
1.5.1.1 Definición del RIA………...14
1.5.1.2 Definición de la organización internacional de estándares (ISO)…..…..15
1.5.2 OBJETIVOS DE LA ROBÓTICA INDUSTRIAL………15
1.6ESTRUCUTA DE UN ROBOT INDUSTRIAL………16
1.6.1 ESLABONES Y ARTICULACIONES………..………16
1.6.2 REDUCTORES………...17
1.6.3 ACTUADORES………...………...17
1.6.4 SISTEMA SENSORIAL……….………22
1.6.5 SISTEMA DE CONTROL………..………...22
1.6.6 ELEMENTOS TERMINALES……….….………23
CAPITULO II CINEMÁTICA DE ROBOTS MANIPULADORE
S…..24
2.1 DESCRIPCIONES ESPACIALES Y TRANSFORMACIONES...…………...…..…...25
2.1.1 FORMULACIÓN MATRICIAL DE LAS TRANSFORMACIONES…..……..25
2.1.1.1 Matriz de traslación……….26
2.1.1.2 Matriz de rotación………..…..27
2.2 CINEMÁTICA DIRECTA………...………..………..…..29
2.2.1 RESOLUCIÓN DE LA CINEMÁTICA DIRECTA A TRAVÉS DE MATRICES DE TRANSFORMACIÓN HOMÓGENEAS……….30
2.2.2 ALGORITMO DE DENAVIT-HATENBERG PARA LA OBTENCIÓN DEL MODEO CINEMÁTICO DIRECTO………31
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
2.3 CINEMÁTICA INVERSA……….………34
CAPITULO III FUNDMENTOS DE CONTRO
L………..35
3.1 INTRODUCCIÓN AL CONTROL………..……....35
3.2 DEFINICIONES………...………...……....35
3.2.1 PROCESOS………...35
3.2.2 PLANTAS……….…..35
3.2.3 SISTEMAS………...….…...35
3.2.4 PERTURBACIONES……….…….…36
3.2.5 CONTROL REALIMENTADO……….……...36
3.2.6 SISTEMAS DE CONTROL REALIMENTADO………...………...36
3.3 CONTROL A LAZO CERRADO Y LAZO ABIERTO………..36
3.3.1 SISTEMAS DE CONTROL DE LAZO CERRADO………36
3.3.2 SISTEMAS DE CONTROL EN LAZO ABIERTO………..………37
3.4 MODELOS MATEMATICOS DE SISTEMAS FISICOS………38
3.4.1 MODELOS MATEMÁTICOS………....38
3.4.2 SISTEMAS LINEALES……….…...…...38
3.4.3 SISTEMAS NO LINEALES………39
3.5 CONTROL EN MANIPULADORES ROBOTICOS………...40
3.5.1 SISTEMAS DE CONTROL ADAPTATIVO……….40
3.5.2 CONTROL POR APRENDIZAJE………..43
CAPITULO IV DESARROLL
O……….44
4.1DISEÑO Y CONSTRUCCIÓN DE UN MANIPULADOR ROBÓTICO…….……….44
4.1.1 ELECCIÓN DEL MANIPULADOR ROBÓTICO………..…...44
4.1.1.1Tipos principales de articulaciones……….44
4.1.1.2Elección en cuanto al torque……….………45
4.1.2 DISEÑO………...……47
4.1.2.1Dimensiones del diseño………47
4.1.2.2Diseño de la base………47
4.1.2.3Diseño del hombro……….…48
4.1.2.4Diseño del eslabón 0………..48
4.1.2.5Diseño del eslabón 1………..49
4.1.2.6Diseño de la pinza………..49
4.1.3 CONSTRUCCIÓN………..49
4.1.3.1Materiales necesarios para la construcción……….……49
4.1.3.2Herramienta necesaria para la construcción………..50
4.1.3.3Construcción de la base……….…50
4.1.3.4Construcción del hombro………..52
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
4.1.3.6Construcción del eslabón 1……….…..54
4.1.3.7Construcción de la pinza………..….55
4.1.4 ENSAMBLE………...57
4.1.4.1Base-Hombro………...57
4.1.4.2Hombro-Eslabón 0……….….58
4.1.4.3Eslabón 0-Eslabón 1………....60
4.1.4.4Eslabón 1-Pinza………...61
4.1.5 PRESENTACIÓN DEL MANIPULADOR ROBÓTICO TERMINADO…….62
4.2MODELO CINEMÁTICO DEL MANIPULADOR ROBÓTICO………..62
4.2.1 HERRAMIENTA DE MATLAB/SIMULINK ―HEMERO‖……….…....63
4.2.2 PLANTEAMIENTO DEL PROBLEMA………..63
4.2.3 OBTENCIÓN DE LA CINEMÁTICA DIRECTA………...64
4.2.4 OBTENCIÓN DE LA CINEMÁTICA INVERSA………..73
4.2.5 SEGUIMIENTO DE TRAYECTORIAS………...81
2.5.2.1 Circulo……….81
2.5.2.2 Elipse………...87
2.5.2.3 Curva uniforme………. 93
4.3 CONTROL SOBRE LAS ARTICULACIONES………...99
4.3.1 PLANTEAMIENTO DEL CONTROL………...99
4.3.2 PLANTEAMIENTO DEL USO DE LAS TRAYECTORIAS………....99
4.3.3ANÁLISIS PARA LA OBTENCIÓN DEL FACTOR DE CONVERSIÓN… 100
4.3.3.1 Teta 1 Articulación Base – Hombro………...100
4.3.3.2 Teta 2 Articulación Hombro – Eslabón 0………..101
4.3.3.3 Teta 3 Articulación Eslabón 0 – Eslabón 1………102
4.3.4 CONVERSIÓN EN MATLAB………...102
4.3.4.1 Trayectoria 1: Circulo………..103
4.3.4.2 Trayectoria 2: Elipse………104
4.3.4.3 Trayectoria 3: Curva uniforme………...106
4.3.5 ADQUISICIÓN DE DATOS………..107
4.4 COMUNICACIÓN………107
CAPITULO V
POSIBLES MEJORAS AL MANIPULADOR………
108
5.1 SEÑAL DE CONTROL (PWM) EN MATLAB……….…108
5.2 PROPUESTA DE COMUNICACIÓN PARA EL MANIPULADOR……….…110
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
INDICE DE FIGURAS
FIGURA 1.1 Robot IRB1400 ABB……….……....8
FIGURA 1.2 Estructura del Manipulador Codo……….…...8
FIGURA 1.3 Área de trabajo del Manipulador Codo………....9
FIGURA 1.4 Manipulador Esférico………..9
FIGURA 1.5 Área de trabajo del Manipulador Esférico……….10
FIGURA 1.6 SCARA (Selective Compliant Articulated Robot for Assembly)…10 FIGURA 1.7 Robot SCARA Epson E2L653S……….10
FIGURA 1.8 Área de trabajo SCARA………..……..….11
FIGURA 1.9 Manipulador Cilíndrico……….…...11
FIGURA 1.10 Robot Seiko RT3300………....11
FIGURA 1.11 Área de trabajo del Manipulador Cilíndrico………..….12
FIGURA 1.12 Manipulador Cartesiano………...12
FIGURA 1.13 Manipulador Cartesiano Epson Seiko………...12
FIGURA 1.14 Área de trabajo del Manipulador Cartesiano……….13
FIGURA 1.15 ABB IRB 940……….….13
FIGURA 1.16 Estructura de un robot industrial………..16
FIGURA 1.17 Distintos tipos de articulaciones para robot……….…..17
FIGURA 1.18 Motor paso a paso………...19
FIGURA 1.19 Estructura del servomotor……….....20
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
FIGURA 1.21 Conexión externa del servomotor……….22
FIGURA 1.22Dispositivos de agarre y sujeción para manipuladores industriales…23 FIGURA 2.1 Cinemática directa y cinemática inversa……….25
FIGURA 2.2 Ejes que representan un sólido rígido que se traslada de una posición a otra……….…27
FIGURA 2.3 Rotación de un sólido rígido en un espacio tridimensional…………29
FIGURA 2.4Parametros Denavit-Haterbeg para una articulación prismática…….33
FIGURA 2.5 Parámetros Denavit-Haterbeg para una articulación rotatoria………33
FIGURA 3.1 Diagrama de bloques de un sistema de control realimentado……….37
FIGURA 3.2 Diagrama de bloques de un sistema de control en lazo abierto……..37
FIGURA 3.3 Sistema de control adaptativo………...41
FIGURA 4.1 Articulación prismática……….…44
FIGURA 4.2 Articulación rotacional………...44
FIGURA 4.3 Motor montado sobre eje de giro……….…45
FIGURA 4.4 Sistema de engranes………...46
FIGURA 4.5 Poleas y bandas dentadas……….….46
FIGURA 4.6 Articulación con brazo de palanca………...46
FIGURA 4.7 Piezas correspondientes a la Base………....47
FIGURA 4.8 Piezas correspondientes al Hombro………....48
FIGURA 4.9 Piezas correspondientes al Eslabón 0………..…48
FIGURA 4.10 Piezas correspondientes al Eslabón 1………....49
FIGURA 4.11 Piezas correspondientes a la Pinza………....49
FIGURA 4.12 Perforaciones sobre el ángulo para la base………...51
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
FIGURA 4.14 Perforaciones sobre el ángulo para el hombro………...52
FIGURA 4.15 Hombro armado………53
FIGURA 4.16 Eslabón 0 armado………..54
FIGURA 4.17 Eslabón 1 armado………..…55
FIGURA 4.18 Perforaciones sobre la pieza de madera para la pinza…………....56
FIGURA 4.19 Medidas y dobleces para el cinturón sujetador………...56
FIGURA 4.20 Pinza armada………..…57
FIGURA 4.21 Ensamble Base – hombro………..58
FIGURA 4.22 Ensamble Hombro – Eslabón 0………....59
FIGURA 4.23 Ensamble Eslabón 0 –Eslabón 1………......61
FIGURA 4.24 Ensamble Eslabón 1 – Pinza……….62
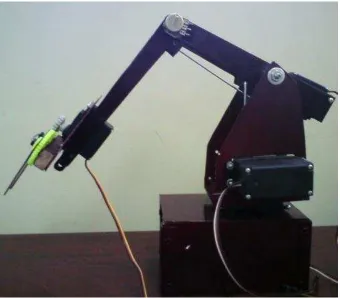
FIGURA 4.25 Manipulador robótico terminado………62
FIGURA 4.26 Longitudes entre articulaciones y grados de libertad del manipulador……….64
FIGURA 4.27 Tramas asociadas a las articulaciones……….65
FIGURA 4.28 Tabla de los parámetros D-H del manipulador robótico…………65
FIGURA 4.29 Manipulador Robótico con θ1=90º, θ2=-72.5º y θ3=40º (vista x, y, z)……….……….71
FIGURA 4.30 Manipulador Robótico con θ1=90º, θ2=-72.5º y θ3=40º (vista x, y)………..……72
FIGURA 4.31 Manipulador Robótico con θ1=90º, θ2=-72.5º y θ3=40º (vista x, z)…72 FIGURA 4.32 Manipulador Robótico con θ1=90º, θ2=-72.5º y θ3=40º (vista y, z)…73 FIGURA 4.33 Manipulador tipo codo en Z0, r……….74
FIGURA 4.34 Representación de la ley de cosenos……….74
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
FIGURA 4.36 Condiciones de ………....77
FIGURA 4.37 Manipulador Robótico con x=-6.6478, y=18.2354, z = 25.5279 (vista x, y, z)……….79
FIGURA 4.38 Manipulador Robótico con x=-6.6478, y=18.2354, z = 25.5279 (vista x, y)……….80
FIGURA 4.39 Manipulador Robótico con x=-6.6478, y=18.2354, z = 25.5279 (vista x, z)………..80
FIGURA 4.40 Manipulador Robótico con x=-6.6478, y=18.2354, z = 25.5279 (vista y, z)………..81
FIGURA 4.41 Manipulador Robótico posicionado en el primer grado de los 360 que conforman al círculo (vista x, y, z)……….…84
FIGURA 4.42 Manipulador Robótico posicionado en el primer grado de los 360 que conforman al círculo (vista x, y)………..84
FIGURA 4.43 Manipulador Robótico posicionado en el primer grado de los 360 que conforman al círculo (vista x, z)………..85
FIGURA 4.44 Manipulador Robótico posicionado en el primer grado de los 360 que conforman al círculo (vista y, z)………..85
FIGURA 4.45 Gráfica de formando el circulo………86
FIGURA 4.46 Gráfica de formando el circulo………86
FIGURA 4.47 Gráfica de formando el circulo………87
FIGURA 4.48 Manipulador Robótico posicionado en el primer grado de los 360 que conforman a la elipse (vista x, y, z)………..….90
FIGURA 4.49 Manipulador Robótico posicionado en el primer grado de los 360 que conforman a la elipse (vista x, y)………90
FIGURA 4.50 Manipulador Robótico posicionado en el primer grado de los 360 que conforman a la elipse (vista x, z)………91
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
FIGURA 4.52 Gráfica de formando la elipse……….92
FIGURA 4.53 Gráfica de formando la elipse………..92
FIGURA 4.54 Gráfica de formando la elipse………..93
FIGURA 4.55 Manipulador Robótico posicionado en el último grado de los 120 que conforman a la curva uniforme (vista x, y, z)……….96
FIGURA 4.56 Manipulador Robótico posicionado en el último grado de los 120 que conforman a la curva uniforme (vista x, y)……….96
FIGURA 4.57 Manipulador Robótico posicionado en el último grado de los 120 que conforman a la curva uniforme (vista x, z)……….97
FIGURA 4.58 Manipulador Robótico posicionado en el último grado de los 120 que conforman a la curva uniforme (vista y, z)……….97
FIGURA 4.59 Gráfica de formando la curva uniforme………...98
FIGURA 4.60 Gráfica de formando la curva uniforme………..98
FIGURA 4.61 Gráfica de formando la curva uniforme………...99
FIGURA 4.62 Gráfica grados vs ancho de pulso para ………..100
FIGURA 4.63 Gráfica grados vs ancho de pulso para ………..101
FIGURA 4.64 Gráfica grados vs ancho de pulso para ………..102
FIGURA 4.65 Tabla de valores correspondientes a la trayectoria 1………….…...104
FIGURA 4.66Tabla de valores correspondientes a la trayectoria 2………106
FIGURA 4.67 Tabla de valores correspondientes a la trayectoria 3………107
FIGURA 5.1 Diseño del PWM ……….……….………....109
FIGURA 5.2 Señal de referencia en grados………..109
FIGURA 5.3 PWM correspondiente a nuestra señal de referencia….………..110
FIGURA 5.4Cabecera del protocolo UDP………..………......111
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
FIGURA 5.6 Bloque de configuración para la transmisión de datos………..112
FIGURA 5.7 Bloque de recepción ………...…….112
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
INDICE DE ECUACIONES
EC. 2.1 Punto P agrupado en el vector X1(x,y,z)……….……….…26
EC. 2.2 Traslación de un vector……….………..…26
EC. 2.3 Traslación de un vector de forma desarrollada………..…26
EC. 2.4 Matriz de transformación de Traslación……….………….…26
EC. 2.5 Notación compacta de la Matriz de Traslación………..27
EC. 2.6 Coordenadas homogéneas……….………...27
EC. 2.7 Ecuaciones de rotación en dos dimensiones……….….28
EC. 2.8 Rotación en forma matricial utilizando coordenadas homogéneas……....28
EC. 2.9 Notación compacta de la Matriz de Rotación…...……….….28
EC. 2.10 Rotación alrededor del eje z………28
EC. 2.11 Rotación alrededor del eje y………28
EC. 2.12 Rotación alrededor del eje x………28
EC. 2.13 Rotación total de un vector………..29
EC. 2.14 (Cinemática directa) Posición del segundo eslabón respecto a la base…30 EC. 2.15 (Cinemática directa) Posición del tercer eslabón respecto a la base…...31
EC. 2.16 Transformación de Matrices para los algoritmos D-H………....32
EC. 2.17 Resultado del producto de matrices del algoritmo D-H………....32
EC. 2.18 Forma de la solución cerrada del problema cinemático inverso…….….34
EC. 3.1 Ejemplo de ecuación no lineal……….…....39
EC. 3.2 Ejemplo de ecuación no lineal………...39
EC. 3.3 Ejemplo de ecuación no lineal………...39
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
EC. 3.5 Ejemplo de ecuación diferencial no lineal……….…...….39
EC. 3.6 Ejemplo de ecuación diferencial no lineal……….………....39
EC. 4.1 Posición en X del manipulador robótico……….…...68
EC. 4.2 Posición en Y del manipulador robótico………...68
EC.4.3 Posición en Z del manipulador robótico………....68
EC. 4.4 Representación de la ley de cosenos………..74
EC. 4.5 Teorema de la resta del coseno………...75
EC. 4.6 Ecuación de θ3 en función de (x,y,z)………..…76
EC. 4.7 Ecuación de θ2 en función de (x,y,z)………..…76
EC. 4.8 Ecuación de θ1en función de (x,y,z)………..…77
EC. 4.9 Ecuación del factor de conversión para θ1 ……….…101
EC. 4.10 Ecuación del factor de conversión para θ2 ………...…101
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
RESUMEN
El presente prototipo tiene como objetivo el desarrollo del modelo
físico, diseño y el análisis cinemático de un brazo robótico, capaz de
seguir distintas trayectorias tomando como punto de partida la
necesidad en la actualidad de procesos automatizados, libres de
recurso humano con el fin de mejorar los procesos de producción y
manofactura.
PRESENTACIÓN
La robótica cada vez esta mas presente en nuestras vidas y es un
componente imprescindible en la industria. Existe una gran variedad
de campos donde se pueden encontrar aplicaciones robóticas, como
pueden ser en el montaje de automóviles, robots soldadores y por
supuesto en tareas muy delicadas como lo pude ser la cirugía, entre
otras áreas más. Por esto el estudio de la robótica y las disciplinas
asociadas a ella se hace cada vez más grande e interesante, lo cual lleva
a contar con un complemento práctico de formación
que
puede
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 1
CAPITULO I
“
FUNDAMENTOS DE ROBÓTICA
”
1.1 INTRODUCCIÓN A LA ROBÓTICA
El termino robótica, el cual se refiere a una ciencia relacionada con la inteligencia artificial y con la ingeniería mecánica; fue utilizado por primera vez en 1942 por el bioquímico, escritor y divulgador científico norteamericano de origen ruso Isaac Asimov en su novela ―Runaround‖1.
La capacidad de las máquinas para comunicar y controlar procesos, dirigir operaciones y cumplir las órdenes, e incluso aprender, llevó al desarrollo de una nueva ciencia: a la cual se le denomino Cibernética, esta palabra fue fundada en la década de 1940 por el matemático norteamericano Norbert Wiener, y la define como la ciencia que estudia la comunicación entre el hombre y la máquina, y entre las propias máquinas.
De la mano de la Cibernética se desarrolló la Biónica, que es la ciencia que estudia todos los aspectos relativos a la simulación de actividades humanas y animales por
medio de máquinas2.
Básicamente el área de conocimiento en la que se enmarca la Robótica es la
Automática3. En la Automática se pueden diferenciar dos componentes claros que
son:
-Unidad de Control: Dirige las acciones a realizar, debe cumplir ciertos criterios u objetivos del control como la estabilización ante perturbaciones, o la evolución temporal y el comportamiento dinámico óptimo respecto a determinados parámetros de calidad.
1
EWING. D. R.; PIGAZZI. A.; WANG. Y. y cols.; ―Robots in the operating room—the history‖ .
Semin Laparosc Srg. 11: 63, 2004.
2
ANTONIO SANCHEZ;Principios básicos de la Robótica. DISA. UPV.
3
Automática: Disciplina que se ocupa de los métodos y procedimientos cuya finalidad es la
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 2
-Actuador: Este realiza las acciones programadas bajo la supervisión de la unidad
de control. Estos dispositivos pueden ir desde los casos más elementales, como accionadores hidráulicos, neumáticos o electromecánicos hasta máquinas más complejas como manipuladores.
La coordinación entre ambos componentes mediante el intercambio de información es lo que permite conseguir la realización correcta de las tareas a realizar.
1.2 ANTECDENTES HISTÓRICOS DE LA ROBÓTICA
La robótica tiene sus orígenes hace miles de años, en donde cual antes no era una
ciencia y los robots eran llamados autómatas4
.Desde el comienzo de la humanidad, el deseo del hombre por crear vida artificial que lo acompañe y realice sus tareas pesadas y repetitivas, causo el desarrollo de los primeros artefactos o simples maquinas.
Los materiales que se utilizaban para la construcción de los primeros autónomas, se encontraban al alcance de todo el mundo, ya que utilizaban maderas resistentes, metales como el cobre que son fácil de trabajar por si se requiriera de algún tipo de transformación para poder ser utilizado en su creación.
A continuación se mencionan algunos inventos los cuales fueron la pauta para la evolución de los robots:
*Herón de Alejandría (85 d.c)- Realizo mecanismos animados que se movían a través de dispositivos hidráulicos, poleas y palancas.
*Cultura árabe (siglos VIII a XV)- Difundió conocimientos griegos, dándoles una aplicación práctica, introduciéndolos en la vida cotidiana de la realeza.
*Durante los siglos XVII y XVIII- Se crearon ingenios mecánicos que tenían algunas características de los robots actuales. Estos dispositivos fueron creados en su gran mayoría por artesanos del gremio de la relojería.
4
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 3
*A finales del siglo XVIII y principios del XIX- Se desarrollaron ingeniosas invenciones mecánicas utilizadas generalmente en la industria textil, las mas destacadas:
*En 1961, J. F. Engelber y G. C. Devol, considerados los padres de la robótica industrial, construyen el primer robot industrial, Unimate-2000. Este robot se instala en fábricas de General Motors al año siguiente. En 1970 el Dr. Víctor Scheinman de la Universidad de Stanford diseña un brazo robot movido por motores eléctricos precursor de la serie de robots industriales Puma.
*En 1973 se funda ASEA (después llamada ABB) primea empresa europea que comercializo robots industriales. En 1978, Unimation desarrolla, con especificaciones de General Motors, el robot PUMA-Programable Universal Machine for Assembly.
*En 1982, el profesor Makino de la Universidad Yamanashi de Japon, desarrolla el concepto de robot SCARA-Selective Compliance Assembly Robot Arm, que busca un robot con número reducido de grados de libertad (3 o 4), un coste limitado y
una configuración orientada al ensamblado de piezas.5
-Hiladora mecánica de Crompton en 1779.
-Telar mecánico de Cartwright en 1785.
-Telar de Jacquard en 1801.
-Muñeca mecánica de H. Maillardet en 1805
-Manipuladores de control remoto en 1951
-Robot móvil ‗shakey‘ por Standford Research Institute en 1968.
-Robot para soldadura Kawasaki en 1974.
-Robot sigma de Olivetti en 1975.
-Desarrollo del robot tipo SCARA en 1979.
-Sistema robótico de captación de recipientes en 1980.
-Robot RS-1 para montaje por IBM en 1982.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 4
Desde este momento se empiezan a utilizar dispositivos automáticos en la producción dando paso con ello a la automatización. La cual se caracteriza por periodos de constantes innovaciones tecnológicas, los cuales se deben a que las técnicas de automatización están muy ligadas a los sucesos económicos mundiales.
1.2 SIGNIFICADO DE ROBOT
El término robot procede de la palabra checa robota, la cual significa ―trabajo obligatorio‖; fue empleado por primera vez en la obra teatral R.U.R. (Robots Universales de Rossum), por el novelista y dramaturgo checo Karel Capek. En su obra trata de la construcción seres al absoluto servicio del hombre, los cuales realizaban todas las tareas de los humanos, mientras se dedicaban al ocio permanente. Desde la antigüedad se conocen ingenios mecánicos con formas más o menos humanas cuyo propósito fue proveer diversión en las cortes, llamar la atención de la gente o para realizar diversos trabajos.6
Hoy en día un robot es una maquina controlada por un ordenador el cual es programado para moverse, manipular objetos y realizar trabajos a la vez que interacciona con su entorno. El objetivo principal es el de sustituir al ser humano en tareas repetitivas, difíciles, desagradables e incluso peligrosas de una forma más segura, rápida y precisa. En base a esto algunas definiciones aceptadas son las siguientes:
a) ―Dispositivo multifuncional reprogramable diseñado para manipular y/o
transportar material a través de movimientos programados para la realización de diversas tareas‖7.
b) ―Dispositivo automático que realiza funciones normalmente adscritas a humanos o maquinas que en algunas ocasiones se asemejan a la forma humana‖8.
Dependiendo de la definición adoptada, los robots exhiben tres elementos claves:
Programabilidad: Un robot dispone de capacidades computacionales y de
manipulación de símbolos.
6 MARK W. SPONG, SETHHUTCHINSON, M.VIDYASAGAR, Robot Modeling and Control;
Capitulo1; 1ª Edición; pag 1.
7
Robot Institute of America, 1979
8
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 5
Capacidad mecánica: Le permite realizar acciones en su entorno y con ello no ser
un procesador de datos.
Flexibilidad: Debido a que un robot puede operar según a un amplio rango de programas y a si manipular material de formas distintas.
Con todo lo anterior se puede considerar a un robot como una máquina complementada con un computador o como un computador con dispositivos de entrada y salida sofisticados. La idea más ampliamente aceptada de robot está asociada a la existencia de un dispositivo de control digital que, mediante la ejecución de un programa almacenado en memoria, va dirigiendo los movimientos de un brazo o sistema mecánico. El cambio de tarea a realizar de un robot se verifica ordenando el cambio de programa.
Un robot puede ser descompuesto en un conjunto de subsistemas funcionales como pueden ser: procesos, planeación, control, sensores, sistemas eléctricos, y sistemas mecánicos. El subsistema de Software es una parte implícita de los subsistemas de sensores, planeación, y control; que integra todos los subsistemas como un todo.
En la actualidad, muchas de las funciones llevadas a cabo por los subsistemas son realizadas manualmente, pero en un futuro las investigaciones en estos campos permitirán la automatización de dichas tareas.
Subsistema de procesos: Incluye las tareas que lleva acabo el robot y el medio donde es colocado. Antes de que un robot pueda realizar una tarea, ésta debe ser buscada dentro de una secuencia de pasos que el robot pueda ejecutar.
Subsistema de Planeación: Incluye los modelos de procesos inteligentes, percepción y planeación. En el modelo de procesos, los datos que se obtienen de una variedad de sensores, son fusionados con modelos matemáticos de las tareas para formar un modelo del mundo. Con ello el proceso de percepción selecciona la estrategia para ejecutar la tarea, y estas estrategias son convertidas dentro de los programas de control del robot durante el proceso de planeación.
Subsistema de Control: En este subsistema, los comandos de alto nivel son
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 6
Subsistema Eléctrico: Incluye todos los controles eléctricos de los actuadores, ya sean estos actuadores hidráulicos y neumáticos son usualmente manejados por electroválvulas controladas.
Subsistema Mecánico: Utiliza los actuadores para poder operar en cualquier medio ambiente, y así realizar una tarea determinada.
Subsistema de sensores: se encarga de monitorear las señales y parámetros dentro del robot, para verificar que las tareas se realizan correctamente, y para construir un modelo del mundo.
1.4 CLASIFICACION DE LOS ROBOTS MANIPULADORES
La potencia del software en el controlador determina la utilidad y flexibilidad del robot dentro de las limitantes del diseño mecánico y la capacidad de los sensores. Los robots han sido clasificados de acuerdo a su generación, a su nivel de inteligencia, a su nivel de control, y por su nivel de lenguaje de programación. La generación de un robot se determina por el orden histórico de desarrollos en la robótica.
Algunas clasificaciones que podemos tener son:
1.- Robots Play-back: Regeneran una secuencia de instrucciones grabadas, como un robot utilizado en recubrimiento por spray o soldadura por arco, comúnmente tienen un control de lazo abierto.
2.- Robots controlados por sensores: Tienen un control en lazo cerrado de movimientos manipulados, y trabajan mediante decisiones basadas en datos obtenidos por sensores.
3.- Robots controlados por visión: Manipulan un objeto, al utilizar información desde un sistema de visión.
4.- Robots controlados adaptablemente: Automáticamente reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 7
De acuerdo Asociación Francesa de Robótica Industrial (AFRI) tenemos la siguiente clasificación:
Tipo a: Manipulador con control manual o telemando.
Tipo b: Manipulador automático con ciclos pre ajustados.
Tipo c: Robot programable con trayectoria continúa punto a punto.
Tipo d: Robot de adquisición de datos.
También pueden ser clasificados mediante los programas en el controlador del robot, y por ello pueden ser agrupados de acuerdo al nivel de control que estos realizan como lo son:
1.-Nivel de inteligencia artificial: donde el programa aceptará un comando el cual lo descompone dentro de una secuencia de comandos de bajo nivel basados en un modelo estratégico de las tareas.
2.- Nivel de modo de control: Aquí los movimientos del sistema son modelados, para lo que se incluye la interacción dinámica entre los diferentes mecanismos, trayectorias planeadas, y los puntos de asignación seleccionados.
3.- Niveles de servosistemas: Los actuadores controlan los parámetros de los mecanismos mediante una retroalimentación interna de los datos obtenidos por los sensores.
4.- Niveles de lenguaje de programación: Al desarrollarse lenguajes de alto nivel, habrá una aplicación más efectiva de los robots para una amplia variedad de tareas.
Existen muchos sistemas de programación de robots, y caen dentro de tres clases:
1.- Sistemas guiados: El usuario conduce el robot a través de los movimientos a ser realizados.
2.- Sistemas de programación de nivel-robot: El usuario escribe un programa de computadora al especificar el movimiento y el sensado.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 8
1.4.1 SISTEMA COMÚN DE CINEMATICA DE MANIPULADORES
Existen diversas maneras de usar las articulaciones prismáticas y de revolución en la construcción de las cadenas cinemáticas, en la práctica solo unos pocos son de uso común. A continuación se describen brevemente algunos arreglos los cuales son los más típicos.
1.4.1.1 Manipulador Articulado (RRR)
El manipulador articulado también llamado de revolución, o manipulador de antropomorfas. El brazo articulado IRB1400 ABB se muestra en la Figura 1.1. y un conjunto de diseño de revolución común es la vinculación paralelogramo.
FIGURA 1.1 Robot IRB1400 ABB
En este tipo el eje de articulación z2 es paralela a z1 y estos ambos son perpendiculares a z0.Este tipo de manipulador que se conoce como un manipulador de codo. La estructura y terminología asociadas con el manipulador del codo se muestran en la Figura 1.2 y Su área de trabajo se muestra en la Figura 1.3.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 9
FIGURA 1.3 Área de trabajo del Manipulador Codo
El manipulador de revolución establece la libertad de movimiento relativamente grande en un espacio compacto. La vinculación paralelogramo, tiene varias ventajas que lo convierten en un diseño atractivo y popular. La característica más notable del manipulador de vinculación paralelogramo, es que el actuador para tres conjuntos se encuentra en un solo link. También su dinámica es más simple que la del manipulador de codo, por lo que es más fácil de controlar.
1.4.1.2 Manipulador esférico (RRP)
Mediante la sustitución de la tercera articulación del codo en el manipulador de revolución por un conjunto prismático se obtiene el manipulador esférico el cual se muestra en la Figura 1.4. El término manipulador esférico se deriva del hecho de las coordenadas esféricas, la definición de la posición del efector final con respecto a un marco de un origen se encuentra en la intersección de los tres ejes z. y su area de trabajo la podemos observar en la Figura 1.5.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 10
FIGURA 1.5 Área de trabajo del Manipulador Esférico
1.4.1.3 Manipulador SCARA (RRP)
El brazo SCARA (Selective Compliant Articulated Robot for Assembly) el cual se muestra en la Figura 1.6. Es un manipulador popular, utilizado para las operaciones de montaje. Aunque el SCARA tiene una estructura PRR, es muy diferente de la del manipulador esférico, tanto en apariencia como en su gama de aplicaciones. A diferencia del diseño esférico, ya que tiene z0 perpendicular a z1 y así mismo z1 perpendicular a z2 , el SCARA tiene a z0 , z1 y z2 mutuamente paralelos. En la Figura 1.7 muestra la E2L653S Epson, un manipulador de este tipo. El espacio de trabajo manipulador SCARA se muestra en la Figura 1.8.
FIGURA 1.6 SCARA (Selective Compliant Articulated Robot for Assembly)
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 11
FIGURA 1.8 Área de trabajo SCARA
1.4.1.4 Manipulador cilíndrico (RPP)
En un manipulador de tipo cilíndrico, la primera articulación es de revolución y produce una rotación alrededor de la base, mientras que las articulaciones segunda y tercera son prismáticas. Como su nombre indica, las variables comunes son las coordenadas cilíndricas del efector final con respecto a la base. El manipulador cilíndrico se muestra en la Figura 1.9. El Seiko RT3300 es un tipo de robot cilíndrico y se muestra en la Figura 1.10 al igual que su área de trabajo lo podemos ver en la Figura 1.11.
FIGURA 1.9 Manipulador Cilíndrico
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 12
FIGURA 1.11 Área de trabajo del Manipulador Cilíndrico
1.4.1.5 Manipulador cartesiano (PPP)
Un manipulador cuyas primeros tres uniones son de tipo prismático se le conoce como un manipulador cartesiano, el cual se muestra en la Figura 1.12. Para el manipulador cartesiano las variables comunes son las coordenadas cartesianas del efector final con respecto a la base. Como era de esperar la descripción cinemática de este manipulador es el más simple de todos los manipuladores. Los manipuladores cartesianos son útiles para aplicaciones de montaje de mesa y como robots de pórtico, para la transferencia de material o de carga. Un ejemplo de un robot cartesiano es el Epson Seiko, que se muestra en la Figura 1.13. y el espacio de trabajo de un manipulador cartesiano se muestra en la Figura 1.14.
FIGURA 1.12 Manipulador Cartesiano
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 13
FIGURA 1.14 Área de trabajo del Manipulador Cartesiano
1.4.1.6 Manipulador paralelo
Un manipulador paralelo es aquel en el cual un subconjunto de enlaces forma una cadena cerrada. De manera más específica un manipulador paralelo tiene dos o más cadenas cinemáticas independientes para conectar la base al efector. La Figura 1.15 muestra el ABB IRB 940 Tricept robot, el cual es un manipulador paralelo. La cinemática de las cadenas cerradas de los robots paralelos pueden dar lugar a una mayor rigidez estructural, y por lo tanto una mayor precisión que los robots de cadena abierta. La descripción de la cinemática de los robots paralelos es fundamentalmente diferente a la de los robots de enlace serie y por lo tanto requiere diferentes métodos de análisis.
FIGURA 1.15 ABB IRB 940
1.5 ROBÓTICA INDUSTRIAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 14
posición fija o en movimiento. Básicamente está destinado a sustituir la actividad física del hombre en las tareas repetitivas, monótonas o peligrosas.
De igual forma parte del progresivo desarrollo de la automatización industrial, favorecido notablemente por el avance de las técnicas de control por computadora, y contribuye de manera decisiva a la automatización en los procesos de fabricación de series de mediana y pequeña escala.
Algunos tipos de automatización industrial son:
Automatización fija: Se utiliza cuando el volumen de producción es bastante, por lo cual se adecua para diseñar equipos especializados para procesar productosos componentes de éstos con alto rendimiento y elevadas tasas de producción.
Automatización Programable: Empleada cuando el volumen de producción es relativamente bajo y hay una diversidad de productos a obtener. En este caso, la producción se obtiene por lotes.
Automatización Flexible: Es una categoría situada entre las dos anteriores. Es más adecuada para el rango medio de producción. Con este tipo de automatización pueden obtenerse simultáneamente varios tipos de producto, en el mismo sistema de fabricación.
La definición anterior es un ejemplo de las muchas definiciones que podemos encontrar provenientes de diversas fuentes, básicamente todas las definiciones de robot industrial son parecidas, a continuación se verán un par de definiciones un poco más formales.
1.5.1 DEFINICIONES DE ROBÓTICA INDUSTRIAL
1.5.1.1 Definición del RIA
ROBOTICS INSTITUTE OF AMÉRICA lo define como un manipulador multifuncional y reprogramable diseñado para mover materiales, piezas, herramientas o dispositivos especializados a través de un programa de
movimientos que realiza una tarea de manufactura específica.9
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 15
1.5.1.2 Definición de la organización internacional de estándares (ISO)
Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas.
Por tanto, es un dispositivo mecánico controlado por elementos eléctricos y electrónicos capaz de desarrollar tareas industriales previamente programadas por el hombre en un leguaje computacional. La concepción de la robótica en su sentido más amplio abarca en la actualidad sistemas muy diversos que involucran:
sensores, actuadores, control automático computarizado e ―inteligentes‖ es decir
con capacidad de relación con entorno a través de retroalimentación sensorial, auto programación y toma de decisiones.
1.5.2 OBJETIVOS DE LA ROBOTICA INDUSTRIAL
Los procesos industriales de la producción masiva requieren aumentar y mejorar la calidad de los productos fabricados; ya que la repetitividad y la precisión son dos características fundamentales de la robótica, esta permite mejorar el nivel de competitividad y la productividad de las industrias y empresas manufactureras. Las causas que ocasionan la mejora de la productividad se pueden resumir como sigue:
Aumento de la velocidad de los procesos productivos. La repetición automática de los movimientos del robot, con optimización de la velocidad, representa una reducción en el ciclo parcial controlado por el manipulador, así como un incremento del rendimiento total en la línea de producción o montaje.
El elevado tiempo de funcionamiento sin fallos, que es previsible esperar de un robot industrial, repercute favorablemente en la consecución de un trabajo uniforme e ininterrumpido.
El robot permite trabajar a la máxima velocidad a las maquinas a las que atiende, así como operar con las características mas favorables de los equipos junto los que trabaja. Acoplamiento ideal para producciones de series cortas y medianas. La fácil programación, unida a la adaptabilidad de numerosas herramientas de trabajo, permite al robot construirse como una célula flexible de fabricación.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 16
mayor duración y, por otra parte, un decrecimiento en los desperdicios de material.10
1.6 ESTRUCTURA DE UN ROBOT INDUSTRIAL
Eslabones y articulaciones
Reductores
Actuadores
Sistema sensorial
Sistema de control
Elementos terminales
FIGURA 1.16 Estructura de un robot industrial11
1.6.1 ESLABONES Y ARTICULACIONES
Mecánicamente, un robot está formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. En la figura 1.16 se muestran los distintos tipos de articulaciones que disponen los sistemas brazo-robot.
10 ANGULO USATEGUI J., AVILÉS R.; Curso de Robotica; 1ra Edición; Pág. 19-20
11
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 17
FIGURA 1.17 Distintos tipos de articulaciones para robot
El movimiento de cada articulación puede ser de desplazamiento, de giro, o una combinación de ambos. De este modo son posibles seis tipos diferentes de articulaciones, aunque en la práctica, en los robots solo se emplean la de rotación y la prismática.
1.6.2 REDUCTORES
La misión de los reductores es adaptar par y velocidad de salida del actuador para el movimiento de los eslabones del robot y de esta forma dar altas prestaciones a las aplicaciones especificas de los robots.
Las características principales de los reductores son:
Bajo peso, tamaño y rozamiento
Capacidad de reducción elevada en un solo paso
Mínimo momento de inercia
Mínimo juego de Backslash
Alta rigidez torsional
1.6.3 ACTUADORES
Los actuadores son dispositivos finales que reciben la señal desde el micro controlador del robot o manipulador, permiten movimiento en los efectores finales del robot y pueden ser sistemas hidráulicos, eléctricos, neumáticos y electrónicos principalmente.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 18
continuación se muestran algunos tipos de motores más utilizados dentro de la robótica.
-Motores paso a paso de magnetización permanente: poseen una polarización magnética constante. El rotor gira para orientar sus polos respecto al estator.
-Motores paso a paso de reluctancia variable: el rotor está formado por un material ferro magnético dentado que tiende a orientarse con los polos bobinados del estator. Este motor sirve para realizar pasos ms pequeños que los que se pueden lograr con el motor de magnetización permanente. Además el rotor de este motor es de baja inercia lo que le permite tener mejor respuesta dinámica durante su funcionamiento. Una desventaja de este motor es que tiene un torque menor que el de magnetización permanente.
-Motores paso a paso híbridos: Combinan los dos anteriores.
La señal de control son los trenes de pulsos que van actuando rotativamente sobre una serie de electroimanes dispuestos en el estator, por cada pulso recibido el rotor del motor gira un número determinado de grados. Para conseguir el giro del motor a un número determinado de grados, las bobinas del estator deben ser excitadas secuencialmente a una frecuencia que determina la velocidad de giro.
Ventajas:
Funcionamiento simple y exacto.
Puede funcionar con velocidad variable.
Ligeros fiables y fáciles de controlar.
Inconvenientes:
El funcionamiento a bajas revoluciones es suave.
Sobrecalentamiento a velocidades elevadas.
Potencia nominal baja.
Motores de corriente alterna.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 19
No tienen escobillas
Usan convertidores estáticos que permiten variar la frecuencia con facilidad y precisión.
La velocidad de giro depende de la frecuencia de la tensión que alimenta el inducido, esta frecuencia se controla a través de un convertidor de frecuencia. Dispone de unos sensores de posición para evitar la pérdida de sincronismo, manteniendo en todo momento el ángulo entre rotor y estator (autopilatados).
Ventajas sobre los DC:
No presentan problemas de mantenimiento por no tener escobillas.
Tienen una gran evacuación del calor por estar el bobinado pegado a la carcasa desarrollan potencias mayores.
Inconvenientes:
Presentan una mayor dificultad de control que los motores DC.
FIGURA 1.18 Motor paso a paso
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 20
Un servo normal o Standard tiene 3kg por cm. de torque que es bastante fuerte para su tamaño. También potencia proporcional para cargas mecánicas. Un servo, por consiguiente, no consume mucha energía.
La corriente que requiere depende del tamaño del servo. Normalmente el fabricante indica cual es la corriente que consume. Eso no significa mucho si todos los servos van a estar moviéndose todo el tiempo. La corriente depende principalmente del par, y puede exceder un amperio si el servo está enclavado.
Hay tres tipos de servomotores:
-Servomotores de CC
-Servomotores de AC
-Servomotores de imanes permanentes o Brushless.
FIGURA 1.19 Estructura del servomotor
-Motor de corriente continúa
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 21
-Engranajes reductores
Se encargan de convertir gran parte de la velocidad de giro del motor de corriente continua en torque.
-Circuito de control
Este circuito es el encargado del control de la posición del motor. Recibe los pulsos de entrada y ubica al motor en su nueva posición dependiendo de los pulsos recibidos.
FIGURA 1.20 Circuito de control del servomotor
Tiene además de los circuitos de control un potenciómetro conectado al eje central del motor. Este potenciómetro permite a la circuitería de control, supervisar el ángulo actual del servo motor. Si el eje está en el ángulo correcto, entonces el motor está apagado. Si el circuito chequea que el ángulo no es correcto, el motor volverá a la dirección correcta, hasta llegar al ángulo que es correcto. El eje del servo es capaz de llegar alrededor de los 180 grados. Normalmente, en algunos llega a los 210 grados, pero varía según el fabricante.
Un servo normal se usa para controlar un movimiento angular de entre 0 y 180 grados. Un servo normal no es mecánicamente capaz de retornar a su lugar, si hay un mayor peso que el sugerido por las especificaciones del fabricante.
Los servomotores tienen 3 terminales:
Terminal positivo: Recibe la alimentación del motor (4 a 8 voltios)
Terminal negativo: Referencia tierra del motor (0 voltios)
Entrada de señal: Recibe la señal de control del motor
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 22
negro; y el del terminal de entrada de señal suele ser de color blanco, naranja o amarillo.
FIGURA 1.21 Conexión externa del servomotor
1.6.4 SISTEMA SENSORIAL
Es un conjunto e dispositivos electrónicos que permiten la interacción del robot con su entorno. Existen muchas formas de clasificar los sensores, a continuación se presentas algunas de ellas:
Directos/Indirectos
Activos (generadores)/Pasivos (moduladores)
Resistivos, capacitivos e inductivos
Termoeléctricos, piezoeléctricos y fotoeléctricos
Locales/Remotos
Con/Sin contacto
Continuos/Discretos
Analógicos/Digitales
1.6.5 SISTEMA DE CONTROL
El sistema de controlar debe ―controlar‖ el movimiento del mecanismo producido
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 23
Si, además se tiene en cuenta las propiedades dinámicas del manipulador y de los motores, aparece el denominado control dinámico. En el caso de considerar, también, la variación de los parámetros del robot con la posición, surge el control adaptativo.12
1.6.6 ELEMENTOS TERMINALES
Es la mano que le proporciona al robot varias posibilidades mas de movimiento, en esta pueden encontrarse herramientas de producción unas tenazas o garras.
Son dispositivos de agarre y sujeción-gripping mechanisms, los cuales poseen capacidad de sujetar, orientar y operar sobre las piezas manipuladas. En ocasiones se les coloca una herramienta de soldadura, pintura, corte, etc.
De acuerdo a la aplicación especifica de un robot industrial se dispone de manos o herramientas las cuales sirven para: recoger piezas, soldar, pintar, etc. La flexibilidad en el trabajo del robot se potencia con la variedad de garras o dispositivos que se pueden acoplar a su muñeca.
La capacidad de realizar un trabajo por las manos del robot está condicionada al número de grados de libertad del manipulador, condición que se define al diseñar el robot.
A continuación de presentan varios esquemas de mecanismos típicos empleados como efector final.
FIGURA 1.22 Dispositivos de agarre y sujeción para manipuladores industriales
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 24
CAPITULO II
“CINEMÁTICA DE ROBOTS
MANIPULADORES
”
La cinemática del robot estudia el movimiento con respecto a un sistema de referencia sin considerar las fuerzas que intervienen en él. Así, la cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función de tiempo, y en particular de las relaciones entre la posición y la orientación del extremo final de robot con los vectores que toman sus coordenadas articulares13.
Existen dos problemas fundamentales a resolver en la cinemática del robot; el primero se conoce como el problema cinemático directo o cinemática directa, y consiste en determinar cuál es la posición y orientación del extremo final del robot, con respecto a un sistema de coordenadas que se toma como referencia, conocidos los valores de las articulaciones y los parámetros geométricos e los elementos del robot; el segundo, denominado el problema cinemático inverso o cinemática inversa, resuelve la configuración angular que debe adoptar el robot para una posición y orientación del extremo conocidas.
Denavit-Hatenberg propusieron un método sistemático para describir y representar la geometría espacial de los elementos de una cadena cinemática, y en particular de un robot, con respecto a un sistema de referencia fijo. Este método utiliza una matriz de transformación homogénea para describir la relación espacial entre dos elementos rígidos adyacentes, reduciéndose el problema cinemático directo a encontrar una matriz de transformación homogénea 4x4 que relacione la localización espacial del extremo del robot con respecto al sistema de coordenadas de su base.
Por otra parte, la cinemática trata de también encontrar las relaciones entre las velocidades del movimiento de articulaciones y las del extremo. Esta relación viene
dada por el método diferencial expresado mediante la matriz jacobiana.14
13
BARRIENTOS A.; Fundamentos de Robótica; Mc Graw Hill; 2ª edición; pág. 119
14
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 25
FIGURA 2.1 Cinemática directa y cinemática inversa
2.1 DESCRIPCIONES ESPACIALES Y TRANSFORMACIONES
2.1.1 FORMULACIÓN MATRICIAL DE LAS TRANSFORMACIONES
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 26
2.1.1.1 Matriz de traslación
Sea un sólido rígido en un espacio tridimensional; un punto P del mismo vendrá definido por tres coordenadas (x,y,z), que agrupamos en un vector X1, tal que:
EC. 2.1
Una traslación vendrá definida por un vector D, de modo que, si se aplica a un sólido, el punto de posición X1 pasara a ocupar una nueva X2 definida por:
EC. 2.2
O de forma desarrollada:
EC. 2.3
De esta forma, la matriz de transformación de traslación se representa, de forma muy sencilla, como suma de dos vectores; sin embargo, no es posible encontrar una matriz de orden 3x3 que represente las traslación pero existe una matriz 4x4, de forma que:
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 27
La figura 2.2 muestra la traslación de un cuerpo rígido que representa la ecuación 2.4.
FIGURA 2.2 Ejes que representan un sólido rígido que se traslada de una posición a otra
O en notación compacta:
EC. 2.5
Donde [Td] es la ―matriz de transformación‖.
En la expresión anterior se ha añadido un cuarto elemento al vector de
coordenadas X. Este modo de representar un vector se denomina de ―coordenadas
homogéneas‖.
EC. 2.6
2.1.1.2 Matriz de rotación
Las ecuaciones de rotación en dos dimensiones se describen a continuación:
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 28
EC. 2.7
Que, en forma matricial utilizando coordenadas homogéneas es:
EC. 2.8
Que en notación compacta es representada por:
EC. 2.9
En el caso de tres dimensiones, el problema es más complejo; el procedimiento a seguir depende de la forma en que la rotación venga definida. Cuando esta está
determinada por tres rotaciones θ, φ, alrededor de los ejes z,y,x respectivamente, cada una de ellas representadas por matrices:
EC. 2.10
EC. 2.11
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 29
La rotación total se calcula mediante el producto matricial:
EC. 2.13
Es preciso observar que el producto de las tres matrices no tiene la propiedad conmutativa. Por tanto esta última ecuación permite encontrar la matriz rotación en tres dimensiones calculables. Un ejemplo de la rotación tridimensional de un cuerpo rígido o eslabón se muestra en la figura 2.9.
FIGURA 2.3 Rotación de un sólido rígido en un espacio tridimensional
2.2 CINEMÁTICA DIRECTA
La resolución de la cinemática directa permite conocer cuál es la posición y orientación que adopta el extremo del robot cuando cada una de las variables, que fijan la posición u orientación de sus articulaciones, toma valores determinados.
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 30
Dado que son las variables articulares las que pueden ser leídas directamente de los correspondientes sensores por la unidad de control del robot, el modelo cinemático directo será utilizado para representar al investigador información relativa a la localización del extremo del robot.
2.2.1 RESOLUCIÓN DE CINEMÁTICA DIRECTA A TRAVES DE MATRICES DE TRANSFORMACIÓN HOMOGÉNEAS
Utiliza fundamentalmente el algebra vectorial y matricial para representar y describir la localización de un objeto en el espacio tridimensional con respecto a un sistema de referencia fijo. Dado que un robot es considerado como una cadena cinemática formada por eslabones unidos entre sí por articulaciones, se puede establecer un sistema de referencia fijo situado en la base del robot y describir la localización de cada uno de los eslabones con respecto a dicho sistema de referencia.15
De esta forma, el problema cinemático directo se reduce a encontrar una matriz de transformación homogénea T que relacione la posición y la orientación del extremo del robot respecto del sistema de referencia fijo situado en la base del mismo.
La matriz de transformación homogénea que representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot se suele denominar matriz i-1Ai, así pues, 0A1 describe la posición y orientación del sistema de referencia solidario a la base, 1ª2 describe la posición y orientación del
segundo eslabón respecto al primero, etc. Del mismo modo, denominando 0Ak a las
matrices resultantes del producto de las matrices i-1ª1 con i desde 1 hasta k, se puede representa de forma total o parcial la cadena cinemática que forma el robot.16
Así, por ejemplo, la posición y orientación del sistema solidario con el segundo eslabón del robot con respecto al sistema de coordenadas de la base se puede expresar mediante la matriz 0A2:
0A2=0A11A2 EC. 2.14
15
BARRIENTOS A.; Fundamentos de Robótica; Mc Graw Hill; 2ª edición; pág. 76
16
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA Página 31
La ecuación 3.14 describe la posición y orientación del sistema solidario con el
segundo eslabón. De manera analógica, la matriz 0A3 representa la localización del
sistema del tercer eslabón.
0A3= 0A11A 22A3 EC. 2.15
La matriz de transformación homogénea resultante corresponde a la localización en la que se desea posicionar al robot. De esta igualdad se obtiene la solución al problema cinemático directo.
2.2.2 ALGORITMO DE DENAVIT-HATENBERG PARA LA OBTENCIÓN DEL MODEO CINEMÁTICO DIRECTO
En 1955 Denavit-Haterbeg proponen un método matricial que establece la localización que debe toma cada sistema de coordenadas {Si} ligado a cada eslabón i de una cadena articulada, para poder sistematizar la obtención de las ecuaciones
cinemáticas de la cadena completa.17
Aplicando esta metodología será posible pasar de un eslabón al siguiente mediante cuatro transformaciones básicas que depende exclusivamente de las características geométricas del eslabón.
Las cuatro transformaciones básicas consisten en una sucesión de rotaciones y traslaciones que permiten relacionar el sistema de referencia del elemento i-1 con el sistema del elemento i.
Es importante recordar que el paso del sistema {Si-1} al {Si} mediante estas 4 transformaciones está garantizado solo si los sistemas han sido definidos de a cuerdo a las siguientes normas:
1. El eje X es perpendicular al eje Z0 2. El eje X1 interseca al eje Z0
Las transformaciones en cuestión son las siguientes:
1. Rotación alrededor del eje Zi-1un ángulo θi.
2. Traslación a lo largo de Zi-1 una distancia di; vector di(0,0, di).
17