INSTITUTO POLITECNICO NACIONAL
Escuela superior
de ingeniería
Mecánica y eléctrica
SIMULACIÓN DE REGULADORES DIFUSOS DE
VELOCIDAD PARA MOTORES DE C.D. CON
EXCITACIÓN SEPARADA.
TESIS
QUE PARA OBTENER EL TITULO DE LICENCIATURA
EN INGENIERÍA ELÉCTRICA
PRESENTA:
SINHUÉ LÓPEZ VITE
.
AGRADECI M I EN TOS
A m is Padres:
Quienes m e han brindado todo incondicionalm ent e, ust edes que siem pre están y no m e abandonan, no tengo com o pagarles lo que han hecho por m í, ¡est o es producto de ust edes tam bién!
A m is Herm anos:
Mi herm ano m enor, sé lo m ucho que crees en m í, t e am o. A m is herm anos en Cristo, la iglesia de Necáxa, los que están y los que se han ido, m i fam ilia que no pierde la fe y sus ganas de orar por m í.
Mis com pañeros y am igos:
Ellos que han sido m i fam ilia durant e m i form ación y crecim ient o profesional, aquellos que han llegado para quedarse, los que m e aconsej aron, ayudaron, enseñaron, apoyaron y soportaron durante t odo est e t iem po, por los buenos m om entos, los que vivim os y los que vendrán…
A m i Fam ilia:
Los que sin necesidad se acercaron para ext ender su apoyo sin pedir nada a cam bio, confiando, brindando su tiem po, paciencia y esperanza, m is tíos y prim os, a m is abuelos; por la bendición de tener una fam ilia con la que puedo contar…
A m is Profesores:
Por el apoyo, el tiem po, la paciencia, su confianza, su cariño y los conocim ient os que m e ot orgaron, dent ro y fuera de un salón de clases, tienen un lugar especial.
SI M ULACI ÓN DE REGULADORES DI FUSOS DE VELOCI DAD PARA MOTORES DE C.D. CON
EXCI TACI ÓN SEPARADA.
RESUMEN
SI MULATI ON OF FUZZY REGULATORS OF SPEED FOR EN GI N ES OF D.C. W I TH SEPARATED EXCI TATI ON .
ABSTRACT
Í N DI CE
RESUM EN I
ABSTRACT I I
Í N DI CE I I I
Í N DI CE DE FI GURAS VI I
Í N DI CE DE TABLAS XI I I
GLOSARI O XI V
CAPI TULO 1 : I N TRODUCCI ÓN . 1
1.1. GENERALI DADES. 1
1.2. ANTECEDENTES. 2
1.3. JUSTI FI CACI ÓN. 6
1.4. OBJETI VOS. 6
1.4.1. OBJETI VO GENERAL. 6
1.4.2.OBJETI VOS PARTI CULARES. 6
1.5. ESTRUCTURA DE LA TESI S. 7
1.6. APORTACI ONES DE LA TESI S. 8
CAPI TULO 2 : MOTOR DE C.D. CON EXCI TACI ON SEPARADA. 9
2.1. I NTRODUCCI ÓN A LA MÁQUI NA DE C.D. 9
2.2. TI POS DE MOTORES DE C.D. 10
2.2.1 MOTORES DE C.D. CON EXCI TACI ÓN SEPARADA. 10
2.2.2. MOTORES DE C.D. CON DEVANADOS DERI VADOS ( SHUNT) . 11
2.2.3. MOTOR DE C.D. CON DEVANADO EN SERI E. 12
2.2.4. MOTOR DE C.D. CON DEVANADO MI XTO. 14
2.3. MODELADO MATEMÁTI CO DEL MOTOR DE C.D. CON EXCI TACI ÓN
SEPARADA. 16
CAPI TULO 3 : LÓGI CA DI FUSA. 21
3.1. TEORÍ A BÁSI CA DE MÉTODOS DEL CONTROL CLÁSI CO. 21
3.1.1. CONTROLADOR. 21
3.1.3. CONTROL PROPORCI ONAL - DERI VATI VO ( PD) . 23
3.1.4. CONTROL PROPORCI ONAL - I NTEGRAL ( PI ) . 24
3.1.5. CONTROLADOR PROPORCI ONAL- I NTEGRAL-
DERI VATI VO ( PI D) . 25
3.2. I NTRODUCCI ON A LA LÓGI CA DI FUSA. 26
3.3. CONJUNTOS DI FUSOS. 27
3.4. CÁLCULO PROPOSI CI ONAL DI FUSO. 29
3.5. DEFI NI CI ONES BÁSI CAS DE LA LÓGI CA DI FUSA. 30
3.6. ALGORI TMOS DI FUSOS DE TAKAGI - SUGENO Y MAMDANI . 33
3.7. DESCRI PCI ÓN DEL ALGORI TMO DE MAMDANI . 34
3.7.1. GENERACI ÓN DE VALORES DI FUSOS. 34
3.7.2. EVALUACI ÓN DE REGLAS. 34
3.7.3. GENERACI ÓN DE VALORES REALES. 36
3.8. DESCRI PCI ÓN MÉTODO DE TAKAGI - SUGENO. 39
CAPI TULO 4 : APLI CACI ÓN DE LOS ALGORI TM OS DE
TAKAGI - SUGEN O Y MAMDAN I AL CON TROL DE VELOCI DAD
DE UN M OTOR DE C.D. 41
4.1. DI SEÑO DEL CONTROL DE VELOCI DAD TI PO TAKAGI - SUGENO. 41 4.2. DESCRI PCI ÓN DE LOS BLOQUES DEL PROGRAMA QUE EMPLEA EL
CONTROL DE VELOCI DAD TI PO TAKAGI – SUGENO. 44
4.2.1. BLOQUE DENOMI NADO “ CARGA DATOS.” 46
4.2.2. DESCRI PCI ÓN DEL BLOQUE “ MOTOR DE CD” . 46
4.2.3. DESCRI PCI ÓN DE LOS BLOQUES Ke Y Kt QUE CONTI ENEN LAS
CONSTANTES DE PROPORCI ONALI DAD. 51
4.2.4. DESCRI PCI ÓN DE LOS BLOQUES QUE SI MULAN EL ARRANQUE
TI PO RAMPA. 52
4.2.5. BLOQUE “ Sum 5” y “ vref” . 53
4.2.7. BLOQUES PARA VI SUALI ZAR Y REALI ZAR GRÁFI CAS
PARA CADA SI MULACI ÓN. 59
4.3. DI SEÑO DEL CONTROL DE VELOCI DAD DI FUSO TI PO MAMDANI . 60
4.4. DESCRI PCI ÓN DE LOS BLOQUES DEL PROGRAMA QUE EMPLEA EL
CONTROL DE VELOCI DAD TI PO MAMDANI . 63
4.4.1 BLOQUE PARA GENERAR EL ERROR Y EL CAMBI O DE ERROR. 65
4.4.2. BLOQUE DEL REGULADOR DI FUSO TI PO MAMDANI . 66
4.4.3. OBTENCI ÓN DE LAS REGLAS. 67
4.4.4. GENERACI ÓN DE VALORES REALES. 68
CAPI TULO 5 : PRUEBAS Y RESULTADOS. 69
5.1. I NTRODUCCI ÓN. 69
5.1.1. I NTRODUCCI ÓN A LOS MODELOS A Y B EMPLEADOS EN LA
SI MULACI ÓN. 70
5.1.2. PROGRAMA A BLOQUES Y GRÁFI CAS DE VELOCI DAD Y
CORRI ENTE DEL MODELO A. 70
5.1.3. PROGRAMA A BLOQUES Y GRÁFI CAS DE VELOCI DAD Y
CORRI ENTE DEL MODELO B. 74
5.2. PRUEBAS, GRÁFI CAS Y RESULTADOS DE LA SI MULACI ÓN APLI CANDO UN CONTROL TI PO TAKAGI – SUGENO PARA LOS
MODELOS A Y B RESPECTI VAMENTE. 79
5.2.1. MODELO A. 79
5.2.2. MODELO B. 83
5.3. PRUEBAS, GRÁFI CAS Y RESULTADOS DE LA SI MULACI ÓN
APLI CANDO UN CONTROL TI PO MAMDANI PARA LOS MODELOS A Y B
RESPECTI VAMENTE. 87
5.3.1. MODELO A. 87
5.3.2. MODELO B. 90
5.4. COMPARACI ÓN DE LOS ALGORI TMOS DE TAKAGI - SUGENO
5.4.1. COMPARACI ÓN DE LOS ALGORI TMOS DE
TAKAGI - SUGENO Y MAMDANI APLI CADOS EN EL MODELO A. 95 5.4.2. COMPARACI ÓN DE LOS ALGORI TMOS DE TAKAGI - SUGENO Y
MAMDANI APLI CADOS EN EL MODELO B. 96
CAPI TULO 6 : CON CLUSI ON ES, APORTACI ON ES
Y TRABAJOS FUTUROS. 99
CONCLUSI ONES. 99
APORTACI ONES. 101
TRABAJOS FUTUROS. 101
APÉN DI CE A. ARCH I VOS CON EXTEN SI ÓN .m EM PLEADOS
EN SI M ULACI ÓN 103
APÉN DI CE B. ¿QUÉ ES EL TOOLBOX DE LÓGI CA DI FUSA? 110
APÉN DI CE C. GEN ERACI ÓN DE VALORES DI FUSOS ( EJEM PLOS) 123
APÉN DI CE D. REGLAS PARA UN CON TROL DI FUSO POR M EDI O DEL VOLTAJE DE ARM ADURA BASADAS EN CI N CO FUN CI ON ES
DE MEMBRESÍ A. 128
APÉN DI CE E. SI N TON I ZACI ÓN DE LOS ALGORI TMOS
DI FUSOS EMPLEADOS. 134
APÉN DI CE F. CON TROL CLÁSI CO COM O CON TROL DI FUSO 143
Í N DI CE DE FI GURAS
CAPI TULO 2
Figura 2.1. Conexión de una fuente de excitación separada a los
devanados de un m ot or de c.d. 11
Figura 2.2. Diagram a con Mot or en derivación Shunt. 12
Figura 2.3. Diagram a Motor Serie. 13
Figura 2.4. Diagram a del Motor con conexión com puesta. 14 Figura 2.5. Mot or de c.d. con excitación separada con corrient e
de cam po constant e. 16
Figura 2.6. Diagram a a bloques de un m ot or de c.d. con
excitación separada utilizado en la sim ulación. 19
CAPI TULO 3
Figura 3.1. Bloque del cont rolador proporcional. 22
Figura 3.2. Sist em a con controlador proporcional. 23
Figura 3.3. Sist em a con controlador PD. 24
Figura 3.4. Sistem a con controlador PI . 25
Figura 3.5. Sist em a con controlador PI D. 25
Figura 3.6. El grado de m em bresía μCD( x) con una
t em peratura x que pert enece por ej em plo al conj unt o de pacient es con “ fiebre alt a” puede ser expresado con
una función cont inua. 31
Figura 3.7. Funciones de m em bresía. a) Form a Triangular. b) Form a
t rapezoidal. c) Form a cam pana. 32
Figura 3.8. Com paración de los algoritm os de cont rol
difuso de Takagi- Sugeno y Mam dani. 33
Figura 3.9. Evaluación de reglas. 35
Figura 3.10. Mét odo de cent ro de gravedad. 37
Figura 3.11. Mét odo de cent ro de área o Singlet on. 38
Figura 3.12. Método del m edio m áxim o. 38
Figura 3.13. Mét odo de a) derecha m áxim o y
Figura 3.14. Evaluación de Reglas y obtención de Salidas Reales
para el m étodo de Takagi- Sugeno. 39
CAPI TULO 4
Figura 4.1. Funciones de m em bresía tipo t rapezoidal para
la variable de ent rada. 41
Figura 4.2. Diagram a a bloques del control de velocidad tipo
Takagi- Sugeno. 43
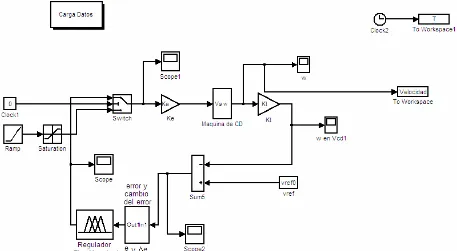
Figura 4.3. Program ación a bloques en Sim ulink para el control
difuso t ipo Takagi – Sugeno. 45
Figura 4.4. Bloque de Sim ulink “ Carga Dat os” . 46
Figura 4.5. Bloque de Sim ulink “ Motor de c.d.” 46
Figura 4.6. Const itución del bloque “ Motor de c.d.” 47
Figura 4.7. Bloques con valores de par de carga 47
Figura 4.8. Bloque sum ador. 48
Figura 4.9. Bloque “ Transfer Fcn” . 48
Figura 4.10. Bloque sum ador “ Sum 2” . 49
Figura 4.11. Bloque Transfer Fcn1. 49
Figura 4.12. Bloques que sim ulan osciloscopios. 50
Figura 4.13. Conj unto de bloques para la creación de gráficos. 50
Figura 4.14. Bloque “ Ke” . 51
Figura 4.15. Bloque “ Kt” . 51
Figura 4.16. Conj unt o de bloques para sim ular el arranque
t ipo ram pa. 52
Figura 4.17. Bloques de Sim ulink “ vref” y “ Sum 5” . 53
Figura 4.18. Bloque de Sim ulink “ sfuzsug” . 53
Figura 4.19. Subsistem a control difuso. 54
Figura 4.20. Bloque de Sim ulink “ Error alt o” . 55
Figura 4.21. Bloque de Sim ulink “ Error baj o” . 56
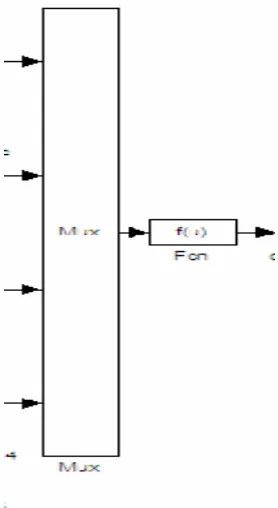
Figura 4.22. Bloques de Sim ulink “ Mux 3” y “ Fcn 3” . 57
Figura 4.23. Bloque de Sim ulink “ Mux 2” y “ Fcn 4” . 57
Figura 4.24. Bloques de Sim ulink correspondient e a la salida real. 58
Figura 4.25. Bloque de Sim ulink “ Osciloscopios” de sintonización y
Figura 4.26. Bloque de Sim ulink que enlazan valores al cam po
de trabaj o de Matlab para su m anipulación y uso. 60
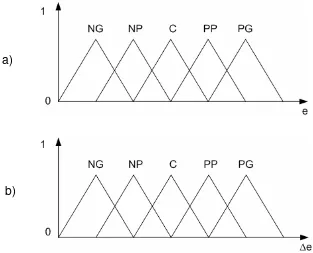
Figura 4.27. Funciones de Mem bresía de entrada para el regulador
de velocidad tipo Mam dani. a) error. b) Cam bio del error. 61
Figura 4.28. Funciones de Mem bresía de salida para el regulador de
velocidad t ipo Mam dani. 62
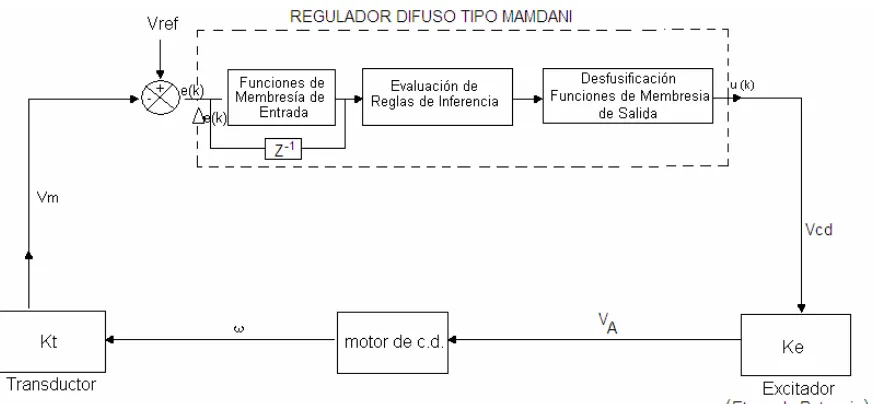
Figura 4.29. Diagram a a bloques para el cont rol de velocidad
difuso t ipo Mam dani. 63
Figura 4.30. Program a general a bloques del control de velocidad
difuso t ipo Mam dani. 64
Figura 4.31. Bloque para obtener los valores del error y
el cam bio de error. 65
Figura 4.32. Bloques del subsistem a que contiene los valores
de error y cam bio de error. 66
Figura 4.33. Bloque del cont rol difuso tipo Mam dani. 66
Figura 4.34. Función que llam a la FI S con la que va a t rabaj ar
el bloque de control difuso t ipo Mam dani. 67
CAPI TULO 5
Figura 5.1. Algoritm o para sim ular el m otor de c.d. con excit ación
separada em pleado en el Modelo A. 71
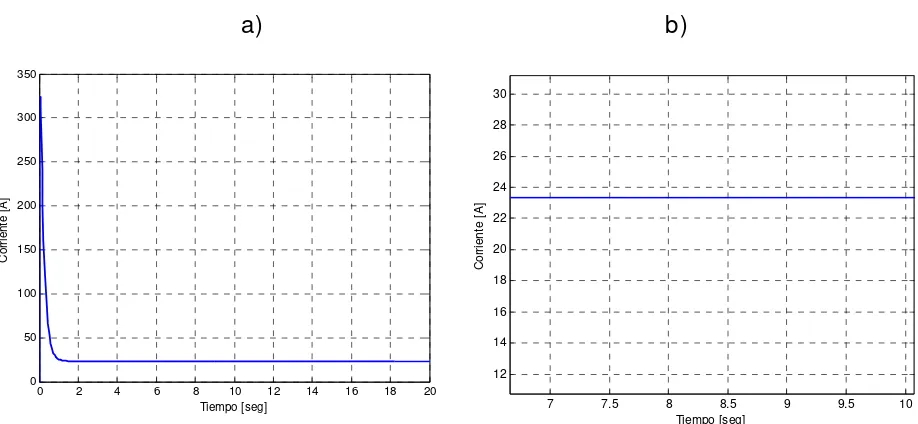
Figura 5.2. Gráficas Corrient e- Tiem po del m ot or en vacío. a) Gráfica
Corrient e- Tiem po. b) Acercam ient o de la gráfica Corrient e- Tiem po. 71
5.3. Gráficas Corrient e- Tiem po del m ot or a plena carga a) Gráfica
Corrient e- Tiem po. b) Acercam ient o de la gráfica Corrient e- t iem po. 72
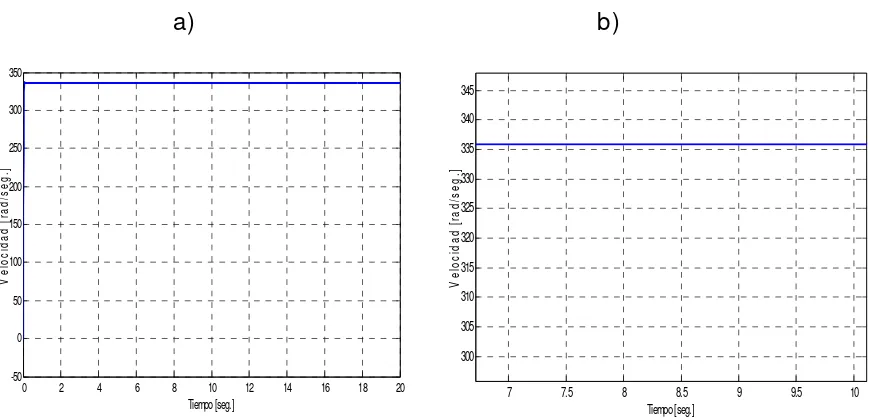
Figura 5.4. Gráficas Velocidad- Tiem po del m ot or. a) Gráfica
Velocidad- Tiem po. b) Acercam iento a la gráfica Velocidad- Tiem po. 73
Figura 5.5. Gráficas Velocidad- Tiem po del m otor a plena carga. a) Gráfica Velocidad- Tiem po. b) Acercam ient o a la gráfica
Velocidad- Tiem po. 74
Figura 5.6. Program a a bloques para sim ular el com port am ient o
del Modelo B. 75
Figura 5.7. Gráficas Corrient e- Tiem po del m ot or en vacío. a) Gráfica
Figura 5.8. Gráficas Corrient e- Tiem po del m otor a plena carga a) Gráfica Corrient e- Tiem po. b) Acercam iento de la gráfica
Corrient e- Tiem po. 76
Figura 5.9. Gráficas Velocidad- Tiem po del m ot or en vacío a) Gráfica Velocidad- Tiem po. b) Acercam iento de la gráfica Velocidad- Tiem po. 77 Figura 5.10. Gráficas Velocidad- Tiem po del m ot or a plena carga
a) Gráfica Velocidad- Tiem po. b) Acercam iento de la gráfica
Velocidad- Tiem po. 78
Figura 5.11. Velocidad – Tiem po aplicando un valor de par de
carga de 0.7 N- m . 79
Figura 5.12. Gráfica Velocidad – Tiem po aplicando valores de
par de carga. 80
Figura 5.13. Acercam ient o del m om ent o de aplicación del valor de
par de carga ( 0.7 N- m ) . 81
Figura 5.14. Gráfica Corrient e – Tiem po aplicando valores de
carga de 0.7 N- m . 82
Figura 5.15. Velocidad – Tiem po aplicando un valor de par de carga
de 29.2 N- m . 83
Figura 5.16. Velocidad – Tiem po aplicando un valor de 29.2 N- m
de par de carga. 84
Figura 5.17. Acercam ient o al com port am ient o de la velocidad
durante la aplicación de un valor de par de carga de 29.2 N- m 85
Figura 5.18. Gráfica Corrient e – Tiem po aplicando valores de carga
de 29.2 N- m . 86
Figura 5.19. Gráfica Velocidad – Tiem po de un cont rol t ipo
Mam dani con aplicaciones del valor de par de carga de 0.7 N- m . 87
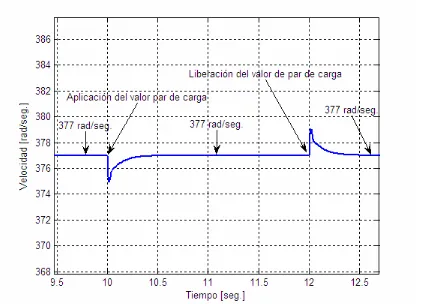
Figura 5.20. Velocidad – Tiem po al aplicar y liberar los valores
de par de carga. 88
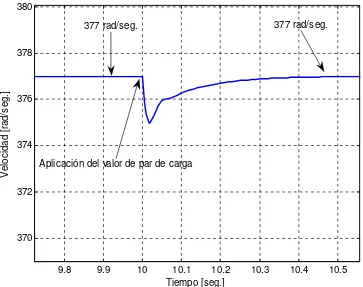
Figura 5.21. Acercam ient o al com port am ient o de la velocidad
durante la aplicación del par de carga de 0.7 N.m . 89
Figura 5.22. Gráfica Corrient e – Tiem po; com port am iento
de la corriente durant e la sim ulación. 90
Figura 5.23. Gráfica Velocidad – Tiem po de un cont rol t ipo
Figura 5.24. Velocidad – Tiem po al aplicar y liberar los valores
de 29.2 N- m del par de carga. 92
Figura 5.25. Acercam iento de la gráfica de velocidad durante
la aplicación del valor de par de carga. 93
Figura 5.26. Corrient e – Tiem po com port am ient o de la corrient e
durante la sim ulación. 94
Figura 5.27. Com paración entre los algoritm os de Takagi- Sugeno y
Mam dani em pleados en el m odelo A. 95
Figura 5.28. Com paración entre los algoritm os de Takagi- Sugeno y
Mam dani em pleados en el m odelo B. 97
APEN DI CE B
Figura B.1. Com ponentes del FI S. 112
Figura B.2. Form a en que int eractúan las part es propias de
un sist em a de inferencia. 113
Figura B.3. Descripción de los com ponentes del edit or FI S 114
Figura B.4. Nom bre asignado a la FI S. 115
Figura B.5. FI S con los nom bres de las variables de entrada. 116
Figura B.6. Cuadro descriptivo del Edit or de Funciones
de Mem bresía. 117
Figura B.7. Nom bram iento de las variables de salida. 118
Figura B.8. Cuadro descriptivo del Edit or de Reglas. 119
Figura B.9. Librería de Sim ulink. 121
APEN DI CE C
Figura C.1. Generación de valores difusos. 124
APEN DI CE D
Figura D.1. Funciones de m em bresía, rangos y parám etros de
la variable “ error” . 130
Figura D.2. Funciones de m em bresía, rangos y parám etros de
la variable “ Cam bioerror” . 131
Figura D.3. Funciones de m em bresía, rangos y parám etros de
Figura D.4. Funciones de m em bresía, rangos y parám etros de
la variable “ error” . 132
Figura D.5. Funciones de m em bresía, rangos y parám etros de
la variable “ cam bioerror” . 132
Figura D.6. Funciones de m em bresía, rangos y parám etros de
la variable “ Volt aj earm adura” . 133
APEN DI CE E
Figura E.1. Respuesta a un escalón con: Kpb= 2, Kib= 0.2, Kpa= 3,
Kpb= 0.2, p1= 0.5, p2= 1.5. 135
Figura E.2. Respuesta a un escalón con: Kpb= 2, Kib= 0.2, Kpa= 3,
Kpb= 0.2, p1= 0.3, p2= 0.9. 136
Figura E.3. Respuesta a un escalón con: Kpb= 2, Kib= 0.22, Kpa= 2.9,
Kpb= 0.25, p1= 0.3, p2= 0.9. 136
Figura E.4. Com paración de las figuras E.1., E2. y E.3. 137
Figura E.5. Con los siguient es parám etros de las variables: “ error” .- rango [ - 0.25, 0.25] , con funciones de m em bresía t ipo t riangular. “ cam bio del error” .- rango [ - 0.25, 0.25] , con funciones de m em bresía tipo t riangular. “ Voltaj e de arm adura” .- rango
[ 0.5, 11] , con funciones de m em bresía t ipo t riangular. 140
Figura E.6. Con los siguient es parám etros de las variables: “ error” .- rango [ - 0.5, 0.5] , con funciones de m em bresía tipo t riangular. “ cam bio del error” .- rango [ - 0.5, 0.5] , con funciones de m em bresía tipo t riangular. “ Voltaj e de arm adura” .- rango
[ 0, 10] , con funciones de m em bresía t ipo t riangular. 140
Figura E.7. Con los siguient es parám etros de las variables: “ error” .- rango [ - 0.3, 0.3] , con funciones de m em bresía tipo t riangular. “ cam bio del error” .- rango [ - 0.3, 0.3] , con funciones de m em bresía tipo t riangular. “ Voltaj e de arm adura” .- rango
[ 1, 12] , con funciones de m em bresía t ipo triangular. 141
Figura E.8. Com portam iento del regulador difuso, con el m étodo de sintonización a prueba y error, de las figuras E.5., E.6., y E.7., con un par de carga de 0.7 n- m aplicado al segundo
I N DI CE DE TABLAS
CAPI TULO 2
Tabla 2.1. Especificaciones y parám etros del m otor
de c.d. para la aplicación del m odelo A. 19
Tabla 2.2. Especificaciones y parám etros del m otor
de c.d. para la aplicación del m odelo B. 20
CAPI TULO 4
Tabla 4.1. Reglas para un cont rol difuso por m edio del
volt aj e de arm adura basadas en cinco funciones de m em bresía. 62
APÉN DI CE C
Tabla C.1. Definición de posibles et iquet as para un control de riego. 123
Tabla C.2. Definición de Reglas. 125
Tabla C.3. Mat riz de asociación difusa. 126
Tabla C.4. Operador Booleano “ Y” . 126
GLOSARI O
c.d.- Corriente Direct a. c.a.- Corriente Alt erna.
Matlab.- Software especializado para su uso en ingeniería.
Sim ulink.- Herram ienta com putacional del software de Matlab, usado, ent re ot ras aplicaciones, para sim ulaciones.
FAM.- Fuzzy Asociat ed Matriz. ( Matriz de Asociación Difusa). FI S.- Fuzzy I nference System . ( Sistem a de I nferencia Difuso).
ω.- Velocidad rotacional ó frecuencia angular. β.- Coeficient e de fricción viscosa.
L
β .- Coeficiente de fricción viscosa de la carga.
m
β .- Coeficient e de fricción viscosa del m ot or.
e.- Error. °
e .- Cam bio del error. μ.- Grado de m em bresía.
L
T .- Par ext erno de carga. J.- Mom ent o de inercia.
m
V .- Volt aj e Medido.
A
V .- Volt aj e de Arm adura.
ref
V .- Voltaj e de Referencia.
. .d c
V .- Voltaj e de Corriente Direct a.
sal
V .- Volt aj e de Salida
I N TRODUCCI ÓN .
1 .1 . GEN ERALI DADES
Los m ot ores de corrient e direct a ( c.d.) , son m áquinas que producen energía m ecánica a partir de energía eléct rica de c.d. Est os disposit ivos hast a hace algunos años, fueron indispensables en aplicaciones en donde se requerían am plias variaciones en la velocidad, sin em bargo con la m iniat urización de elem ent os en est ado sólido, los m ot ores de inducción con program as de accionam ient o se han hecho m ás com petitivos. Esto se debe a que los m otores de c.d. requieren m ayor m ant enim ient o debido a la exist encia del conm ut ador y las escobillas. A pesar de ello, los m ot ores de c.d. no se podrán dej ar de ut ilizar repent inam ent e ya que act ualm ent e se encuent ran funcionando en m uchas aplicaciones indust riales y una gran cant idad de ellos cuent an con una larga vida út il.
1 .2 . AN TECEDEN TES.
En 1965 L. A. Zadeh, profesor de teoría de sistem as de la Universidad de California en Berkeley publicó un art ículo llam ado conj untos difusos, que dio origen a innum erables artículos sobre lógica difusa, la cual perm it ió t ener una alternativa program able de control y proceso t ecnológico que trata con el t ipo de descripciones subj etivas o am biguas que son com únm ent e usadas en el m undo real.
Cuando Zadeh se dio cuent a que la nat uraleza de la lógica booleana, no t om aba en cuent a los dist int os grados de veracidad o falsedad de una proposición real, expandió la idea de un conj unt o clásico del álgebra de Boole, t om ando en cuent a las infinit as variaciones ent re verdad y falso al cual llam ó conj unto difuso. Una vez que la lógica difusa fue inventada en los Estados Unidos, no tuvo gran desenvolvim iento, ya que fue víct im a de m últ iples crít icas; fue hast a los 70´ s que en Europa se perfeccionó y t uvo sus prim eras aplicaciones. En el Queen Mary College en Londres, I nglaterra, Ebrahim Mam dani, uso los principios de la lógica difusa para aplicarlo a una m áquina de vapor la cuál no podía tener baj o control con las técnicas convencionales hasta esa época, este algorit m o de cont rol consist e de 3 pasos: Generación de Valores Difusos, Evaluación de Reglas y Generación de valores reales.
proceso de lim piado de agua y en un convert idor que se ut iliza en el proceso de hacer acero. En ese m ism o año se inventó el prim er circuito int egrado Difuso por dos j aponeses, Masaki Togai y Hiroyuki Wat anabe que provocó el interés de las em presas en est os circuitos para im plem entarlos en sus sistem as, este hecho llevó a Japón a ser el principal export ador de aparat os de la industria con aplicación directa con y hacia para la lógica Difusa. [ 27]
En los 90´ s surgieron varios trabaj os que han servido com o referencia para que est a tesis se lleve a cabo:
¾ Cort es Mat eos Raúl ( 1997) . En est e t rabaj o se describe el
análisis, diseño e im plem ent ación de un cont rol de excit ación para un generador síncrono por m edio de un cont rol difuso; present a las bases de la lógica Difusa y la operación de los m odelos de cont rol de Mam dani y Takagi – Sugeno aplicados al cont rol de la excit ación de un generador síncrono.
Realiza un algorit m o nuevo para la sint onización de los cont roles difusos basados en las relaciones entre los m odelos m atem áticos de Mam dani y Takagi – Sugeno y un cont rol PI de est ruct ura variable. Este proyecto se realizó de la m anera siguient e:
calcular el algoritm o de control. El prototipo fue probado en un generador de 5KVA, som et ido a cam bios de carga, así com o a pruebas de cort o circuito y liberación de éste [ 6] .
¾ H. M. Gerardo Celso ( 1997) Em pleando el algorit m o de Mam dani present a el análisis y diseño de un cont rol difuso de velocidad de un m ot or de c.d. con excit ación separada, dicho cont rol se realizó variando el volt aj e de arm adura y de cam po; haciendo un est udio de un determ inado núm ero de funciones de m em bresía con el que el control difuso obtiene m ej ores resultados. Este trabaj o no presentó im plem ent ación [ 7] .
¾ Díaz García Luis M. ( 1999) Basándose en el paquete FUDGE el desarrolla una t arj et a para el cont rol difuso de velocidad de un m otor de c.d. En este trabaj o se present a un sist em a de cont rol de velocidad difuso para un m ot or de c.d. im plem entado en un m icrocontrolador de Motorola 68HC11 em pleando la técnica de Mam dani; dicho program a det erm ina el ángulo de disparo de los tirist ores del sem iconvert idor m onofásico controlado por fase perm itiendo con ello variar la velocidad del m ot or por volt aj e de arm adura [ 8] .
Trabaj os de principios de siglo XXI ( 2 0 0 0 – 2 0 0 5 )
¾ Alt am irano González Manlio AL ( 2002) . En est e t rabaj o se
desarrolla una est rat egia para el diseño y análisis del aj uste aut om át ico de los parám et ros de las funciones de m em bresía de un cont rol difuso em pleando algorit m os genét icos. Est a est rat egia se aplica al cont rol de velocidad de un m otor de corriente directa con excit ación separada. El cont rol de la velocidad se lleva a cabo de dos form as, independient e una de la ot ra, por m edio de la variación del volt aj e de arm adura ó por m edio de la variación del volt aj e de cam po [ 25] .
¾ Herrera Espinosa Javier ( 2003) Describe el análisis, diseño y const rucción de un regulador de velocidad t ipo Takagi – Sugeno para un arreglo de m ot or de c.d. – alt ernador. El regulador difuso de velocidad se realiza a través de la variación del volt aj e de arm adura de c.d. con el fin de m antener la frecuencia de 60 Hz en el alt ernador suj et o a cam bios de carga y fallas de corto circuito. Se present a adem ás el algorit m o de sint onización para el regulador difuso, basado en las relaciones entre los m odelos m at em át icos de Mam dani, Takagi – Sugeno y un cont rol proporcional – int egral. Se im plem enta en la tarj eta basada en el procesador digital de señales ( DSP) TMS320F240 de Texas I nstrum ent. El program a desarrollado perm ite: a) arrancar el m otor de c.d. - alternador a t ensión reducida; b) m edir la velocidad del conj unt o del m ot or de c.d. – alt ernador; c) la com unicación con una com putadora personal y; d) cálculo del algorit m o de cont rol [ 27] .
de velocidad de un m ot or de c.d. de 1 H.P. em pleando la técnica de Mam dani e im plem ent ando en la tarj eta MC68HC12 para el cont rol de la velocidad de una m áquina t ribológica de abrasión seca [ 26] .
1 .3 . JUSTI FI CACI ÓN
Debido a la im port ancia en la aut om at ización de sist em as en la crecient e industria, y al em pleo de cont roles int eligent es, est e t rabaj o de t esis present a la aplicación y sim ulación de los algorit m os de cont rol difuso tipo Takagi- Sugeno y Mam dani en la regulación de velocidad de m ot ores de c.d., siendo la sim ulación de sist em as una herram ient a im port ant e en el control, previo a su im plem ent ación, pues perm ite su estudio, com prensión y m ej oram ient o. Así m ism o est e t rabaj o perm it e la com paración entre los algorit m os de cont rol int eligent es para decidir de alguna m anera, el uso de ést os.
1 .4 . OBJETI VOS
1 .4 .1 . OBJETI VO GEN ERAL
Realizar la sim ulación de cont roles difusos para la regulación de la velocidad en m otores de c.d. con excit ación separada.
1 .4 .2 . OBJETI VOS PARTI CULARES
2.-Analizar y obt ener las vent aj as y desvent aj as de los controles difusos ut ilizados en cada aplicación.
1 .5 . ESTRUCTURA DE LA TESI S
El Capit ulo 1 corresponde a la int roducción. En el se dan las generalidades, los ant ecedentes, la j ust ificación, los obj etivos y la est ruct ura de la t esis.
En el Capit ulo 2 se da una breve int roducción de la m áquina de c.d. Adem ás se describe cada uno de los t ipos de m ot ores de c.d. exist ent es. Tam bién se desarrolla el m odelo m at em át ico del m ot or, y se m uestran las tablas de valores nom inales de los Modelos A y B que se ocuparan en sim ulación.
El Capit ulo 3 cont iene las leyes que rigen el cont rol clásico, el concept o de teoría difusa, conj untos difusos, term inologías que se em plean en la lógica difusa, las operaciones fundam ent ales y la est ruct ura de los algorit m os de cont rol difuso de Takagi - Sugeno y Mam dani.
En el Capit ulo 5 se dan los resultados de las pruebas obtenidas con los algorit m os difusos, para los Modelos A y B, las pruebas que se realizaron fueron: en vacío y con carga. Se m uest ran adem ás las gráficas de Velocidad y Corrient e para cada sim ulación.
En el Capit ulo 6 se tienen las conclusiones del t rabaj o de tesis, los t rabaj os a fut uro, así com o algunas recom endaciones de ést e.
1 .6 . APORTACI ON ES DE LA TESI S.
Las aport aciones de la tesis son las siguientes:
¾ Se desarrollaron los algorit m os de cont rol difuso de Mam dani y Takagi – Sugeno para el control de velocidad para el m otor de c.d., Modelo A y B. Est e algorit m o perm it irá asent ar las bases para la didáct ica sobre los cont roles int eligent es aplicados a m ot ores de c.d. así com o la im plem ent ación para trabaj os futuros.
¾ Se desarrollaron los algorit m os de cont rol difuso de Mam dani y Takagi – Sugeno para el control de velocidad de un m ot or de c.d.
¾ Se describe el m ét odo em pleado de Mam dani en la herram ient a fuzzy de Sim ulink con su I nt erfase Gráfica, sirviendo cóm o guía para trabaj os futuros.
MOTOR DE C.D. CON EXCI TACI ON SEPARADA.
2 .1 . I N TRODUCCI ÓN A LA MÁQUI N A DE C.D.
Un generador de c.d., en esencia, produce corriente libre de rizo y un volt aj e fij o de m anera m uy precisa a cualquier valor deseado desde cero hast a el valor m áxim o nom inal; est a es en realidad una corrient e eléct rica de c.d. que perm ite la m ej or conm ut ación posible en el m ot or, porque carece de las form as de ondas bruscas de energía de c.d. de los rectificadores. El generador tiene una respuest a excelent e y es part icularm ent e apropiado para el cont rol preciso de salida por reguladores de ret roalim ent ación de cont rol, adem ás de est ar bien adaptado para producir corriente de excitación de respuesta y controlada en form a precisa tanto para m áquinas de c.a. com o de c.d.
características básicas de los m otores de c.d. así com o sus diagram as de conexiones.
2 .2 . TI POS DE MOTORES DE C.D.
Los m ot ores de c.d. según su configuración se pueden clasificar en:
- Mot or de c.d. con excit ación separada. - Mot or de c.d. en derivado o Shunt . - Mot or de c.d. en serie
- Mot or de c.d. Com puesto o Com pound.
Cada t ipo de m ot or t iene caract eríst icas de operación m uy definidas, por lo que es necesario conocer los requerim ient os generales de la carga ant es de hacer la elección apropiada del m otor.
A continuación se describen las características generales de cada configuración:
2 .2 .1 MOTORES DE C.D. CON EXCI TACI ÓN SEPARADA.
En est os m ot ores la int ensidad del cam po no se afecta en form a apreciable por los cam bios en la carga, de m anera que se obt iene una velocidad relat ivam ent e const ant e. Est e t ipo de m ot ores se pueden usar para la operación de m áquinas que requieren una velocidad casi const ant e.
¾ Perm it e cam biar la velocidad m ediant e variaciones de volt aj e de arm adura y volt aj e de cam po.
¾ Perm ite variación de voltaj e de cam po y voltaj e de arm adura const ant e.
¾ Los m otores de c.d. con excit ación separada pueden alcanzar velocidades alt as peligrosas cuando se pierde la corrient e de cam po.
a) b)
Figura 2.1. Conexión de una fuente de excitación separada a los devanados de un m ot or de c.d.
2 .2 .2 . MOTORES DE C.D. CON DEVAN ADOS DERI VADOS ( SHUN T) .
devanado y t am bién la velocidad de rot ación. En la m edida que la velocidad aum ent a, el par se reduce en form a proporcional, resultando una potencia casi constante. Si se conecta una resistencia variable en el circuit o de la arm adura, se obt iene una regulación m ayor del 15% al 22% . La figura 2.2., m uest ra el diagram a de ést e m ot or así com o su conexión.
Figura 2.2. Diagram a con Motor en derivación Shunt.
Las caract erísticas básicas del m otor con devanados derivados son:
¾ La bobina de cam po cont iene un núm ero relativam ente grande de espiras, las cuales m inim izan la corriente requerida para producir un cam po fuert e en el est at or. Est á conectado a una fuente de c.d. separada.
¾ Una característica de este tipo de diseño es su excelente regulación de velocidad.
2 .2 .3 . MOTOR DE C.D. CON DEVAN ADO EN SERI E.
ent onces, la velocidad aum ent a con valores de carga m uy ligeros. La velocidad puede llegar a ser excesiva. Por la razón anterior, los m otores en conexión se conectan ó están acoplados direct am ente a la carga para prevenir la sobrevelocidad.
El increm ent o en la corrient e de arm adura con un aum ent o en la carga, produce una m ayor int ensidad en el par, de m odo que los m otores en conexión serie son particularm ente út iles para ciclos de trabaj o que requieran un par de arranque m ayor y en donde se pueden esperar sobrecargas severas.
La velocidad se puede aj ustar por m edio de una resistencia variable colocada en serie con el m otor, pero debido a la variación de la carga, la velocidad no se puede conservar en ningún valor const ant e. El uso de este m ot or está lim it ado a servicios de t racción y elevadores.
Figura 2.3. Diagram a Motor Serie.
Las caract erísticas básicas del m otor con devanados en serie son:
¾ La caract erística de este diseño es un m uy alto par de arranque.
¾ La regulación de velocidad es pobre con una velocidad m uy alt a de vacío.
2 .2 .4 . MOTOR DE C.D. CON DEVAN ADO MI XTO.
En estos m otores, la variación de velocidad se debe a los cam bios en la carga, la cuál es m ucho m enor que en los m ot ores con conexión serie, pero m ayor que con conexiones paralelo ó derivado ( Shunt) . Tiene t am bién un par de arranque m ayor que los m ot ores en conexión paralela y una capacidad para soportar cargas pesadas. Sin em bargo, operan con un rango m ás est recho de aj ust e de velocidad.
Estos m ot ores usan, tanto los devanados de cam po paralelo com o serie, y conj untan las características de am bos. Dependiendo de la m anera com o se conect an, se obt ienen 4 clases de m ot ores en conexión com puesta ( com pound) .
Figura 2.4. Diagram a del Mot or con conexión com puest a.
¾ Derivación largo acum ulat ivo.
¾ Paralelo largo diferencial.
¾ Paralelo cort o acum ulat ivo.
Los m ot ores con devanado com puest o se usan cuando el arranque de la carga es m uy pesado ó cuando los cam bios en la carga se dan en form a intem pest iva, cóm o es el caso de las bom bas reciprocas, las m áquinas de presión ó las m áquinas perforadoras.
Las caract erísticas básicas del m otor com puesto son:
¾ El m ot or de c.d. com puest o usa devanado serie y derivado, los cuales usualm ent e conect an sus cam pos en form a adit iva.
¾ Estas dos conexiones de los devanados producen características interm edias de los m otores con devanado serie ó derivado.
¾ La regulación de velocidad es m ej or que la regulación en los m otores t ipo serie.
¾ Estos m ot ores usan im anes perm anentes en lugar de devanados de cam po para producir el cam po m agnét ico del estator.
¾ Los m ot ores de im anes perm anentes proporcionan una int ensidad de cam po const ant e, con caract eríst icas sim ilares a los de un m ot or de c.d. de cam po derivado.
¾ Los m otores con im anes perm anent es se usan en aplicaciones de baj a pot encia, en part icular los operados por bat ería.
R1
V1
I1
L11
RA
LAA
R1
VA
Bm
TL
IA
Jm
JL BL
Te
w
+
-posibilidad de confirm ación con t rabajos previos. El m odelo m atem ático em pleado se describirá a cont inuación:
2 .3 . MODELADO MATEMÁTI CO DEL MOTOR DE C.D. CON EXCI TACI ÓN SEPARADA.
En la figura 2.5 que se m uestra a continuación, es representada esquem áticam ent e el m odelo de un m ot or de c.d. con excit ación separada, en donde se considera que la corriente de cam po es const ant e. Baj o condiciones dinám icas el par elect rom agnét ico del m ot or puede expresarse com o:
e A
B
T
Ldt
d
J
KI
T
=
=
ω
+
ω
+
( 2.1)Donde:
K = LA1I1 es una const ant e
J = Jm+ JL
B = Bm+ BL
Durant e el est ado dinám ico la ecuación de volt aj e del circuit o de arm adura del m otor de la figura 2.5. puede darse de la siguient e m anera: dt dI L I R KI V A AA A A A
A = + + ( 2.2)
Com o el m odelo es lineal, se puede em plear la técnica de la t ransform ada de Laplace para encontrar la dinám ica de este m otor. Dicha t écnica perm it e convert ir las ecuaciones diferenciales en un conj unt o de ecuaciones algebraicas en el dom inio de la frecuencia.
Aplicando la t ransform ada de Laplace a la ecuación 2.1 se t iene:
) 0 ( ) ( ) ( ) ( )
(s B sJ ω s T s jω
KIA = + + L − ( 2.3)
Donde IA(s),TL(s) y ω
( )
s son las transform adas de Laplace de IA, TL y ω respect ivam ent e, sim ilarm ent e la ecuación 2.2 puede expresarse en transform ada de Laplace cóm o:) 0 ( ) ( ) ( ) ( )
( A AA A A AA A
A s R sL I s KI s L I
V = + + − ( 2.4)
Después de una m anipulación algebraica ( ver referencia 18) de las ecuaciones 2.3 y 2.4 obt enem os:
2 ) )( ( ) )]( ( ) 0 ( [ )] 0 ( ) ( [ ) ( K sL R sJ B sL R s T J I L s V K s AA A AA A L A AA A + + + + − + + = ω
De form a sim ilar se obt iene la ecuación para la corrient e de arm adura: 2 ) )( ( ) )]( ( ) 0 ( [ )] ( ) 0 ( [ ) ( K sL R sJ B sL R s T J s T J K s I AA A AA A L L A + + + + − + − −
= ω ω ( 2.6)
Las ecuaciones 2.5 y 2.6 describen la dinám ica de un m otor de c.d. considerando la corrient e de cam po constante. Si se considera condiciones iniciales iguales a cero, la función de t ransferencia que relaciona la velocidad ω(s) con el volt aj e de arm adura VA (s) para un m otor de corriente directa con excitación separada considerando la corrient e de cam po const ant e es:
) ( ) ( ) ( ) ( ) ( 2 2 JL s R J BL R B K
s K s V s A AA A AA
A + + + +
= ω
( 2.7)
Por ot ra part e la función de t ransferencia que relaciona la velocidad del m ot or con el par de la carga, es la siguient e:
) ( ) ( ) ( ) ( ) ( ) ( 2 2 K B R BL J R s JL s sL R s T s A AA A AA AA A
L + + + +
+ − =
ω
( 2.8)
Figura 2.6. Diagram a a bloques de un m otor de c.d. con excitación separada ut ilizado en la sim ulación.
El diagram a a bloques de la figura anterior fue im plem entado en el program a SI MULI NK de Mat lab, que sirve para llevar a cabo las sim ulaciones y poder visualizar la dinám ica del m ot or de c.d. para cada aplicación.
Los valores nom inales de los m otores em pleados para estas sim ulaciones se m uestran en la tabla 2.1. y 2.2. :
Especificaciones
Potencia: 1.8 KW Voltaje de armadura VA=220V
Voltaje de campo V1=160V Corriente de armadura IA=10 A (0.7 A Vacío)
Corriente de Campo I1=0.68 A Velocidad ω=377 rad./seg.
Parámetros
Inductancia de armadura LAA=0.0204 H Resistencia de armadura RA=2.45Ω
Inductancia de campo L11=17.25H Resistencia de campo R1=228.2Ω
Momento de inercia del motor J=0.0036kg-m2 Inductancia mutua de velocidad LA1=0.8514H
Par nominal de carga TL= 4.77 N-m Coeficiente de fricción viscosa B=0.00107
kg-m2/seg
Especificaciones
Potencia = 5 HP Voltaje de armadura VA = 240V
Voltaje de campo V1= 240V Corriente de armadura IA = 39.58 A
Corriente de Campo I1=1.0A Velocidad ω=120.14 rad./seg.
Parámetros
Inductancia de armadura LAA=0.012H Resistencia de armadura RA = 0.6 Ω
Inductancia de campo L11=120 H Resistencia de campo R1=240 Ω
Momento de inercia del motor J = 1.2kg-m2 Inductancia mutua de velocidad LA1=1.8H
Par nominal de carga TL= 29.2 N-m Coeficiente de fricción viscosa B= 0.35
kg-m2/seg
LÓGI CA DI FUSA.
3 .1 . TEORÍ A BÁSI CA DE MÉTODOS DEL CON TROL CLÁSI CO.
A cont inuación se present a la t eoría básica del control clásico para com prender las bases de las cuáles se procede a los algoritm os de cont rol difuso, t eniendo en est e t rabaj o de t esis un cont rol t ipo Takagi-Sugeno que t iene bases en el cont rol PI , y así t am bién, el algorit m o de Mam dani. En el apéndice F se da una breve int roducción al cont rol clásico com o un cont rol difuso y se present an sus reglas lingüíst icas básicas
3 .1 .1 . CON TROLADOR.
a) Cont rol proporcional ( P)
b) Cont rol proporcional e int egral ( PI ) c) Control proporcional y derivativo ( PD)
d) Cont rol proporcional, int egral y derivat ivo ( PI D)
3 .1 .2 . CON TROL PROPORCI ON AL ( P) .
El cont rol proporcional no es m ás que un am plificador de ganancia aj ust able. Su obj et ivo es hacer m ás rápida la respuest a del sist em a y reducir el error de régim en, lo que se consigue al increm entar la ganancia del cont rolador. Sin em bargo, est e increm ent o en la ganancia puede provocar que el sist em a se haga cada vez m ás oscilatorio.
Figura 3.1. Bloque del cont rolador proporcional
Kp s E
s U
=
) (
) (
( 3.1)
Kp= sensibilidad proporcional ó ganancia.
Figura 3.2. Sistem a con cont rolador proporcional.
Donde R( s) es la señal de referencia y Tn( s) es una señal de pert urbación.
3 .1 .3 . CON TROL PROPORCI ON AL - DERI VATI VO ( PD) .
Figura 3.3. Sistem a con cont rolador PD.
El control PD es un control con alt a sensibilidad. Su desvent aj a radica en que am plifica señales de ruido y puede producir un efect o de sat uración en el acondicionador. Para obtener esta caract erística derivativa se deriva directam ente la señal de error y se le afect a por una const ant e a la que se denom ina const ant e derivat iva.
En la figura 3.3., se m uestra el diagram a a bloques del sist em a de cont rol con el cont rolador PD.
3 .1 .4 . CON TROL PROPORCI ON AL - I N TEGRAL ( PI ) .
Si la función de t ransferencia del proceso no contiene un
int egrador (
s
1 ) , ello im plicará que exist a un error de régim en SS
e en la
cuando el error e( t) es cero. Este cont rolador t iene la desvent aj a de que puede llegar a causar problem as de inest abilidad.
Para la obt ención de est e t ipo de acción se añade a la part e proporcional el resultado de integrar la señal de error habiendo afect ado a ést a por una ciert a const ant e a la que se denom ina const ant e de int egración. A cont inuación se m uest ra un diagram a a bloques del sistem a de control en lazo cerrado con un cont rolador PI .
Figura 3.4. Sistem a con cont rolador PI
3 .1 .5 . CON TROLADOR PROPORCI ON AL- I N TEGRAL- DERI VATI VO ( PI D) .
Est e cont rolador incorpora las ventaj as que proporcionan cada una de las t res acciones individuales descrit as ant eriorm ent e. A cont inuación se m uest ra el diagram a a bloques del sist em a con est e t ipo de controlador. [ 28]
Así pues, los algorit m os de cont rol em pleados en est e t rabaj o de tesis, t ienen una relación fundam ent al con los m étodos de control clásico, y es así com o el algorit m o de Takagi- Sugeno y Mam dani en su proceso se ident ifica una part e proporcional ( Kp) y una part e integral ( Ki) , siendo una opción a desarrollar en un t rabaj o a fut uro, la com paración ent re los m ét odos propuest os en est a t esis y un controlador PI clásico.
3 .2 . I N TRODUCCI ON A LA LÓGI CA DI FUSA.
que los valores de verdad utilizados tienen, por lo general, una connot ación de incert idum bre. Un vaso m edio lleno, independient em ente de que t am bién esté m edio vacío, no está lleno com plet am ent e ni est á vacío com plet am ent e. Qué t an lleno puede est ar es un elem ent o de incert idum bre, es decir, de difusidad, ent endida est a últ im a com o una propiedad de indet erm inism o. Ahora bien, los valores de verdad asum idos por enunciados aunque no son det erm inist as, no necesariam ent e son desconocidos. La lógica difusa ha tenido aplicaciones de sum a relevancia en el procesam iento electrónico de dat os. En det erm inadas áreas de conocim ient o, a sus enunciados se les asocia valores de verdad que son grados de veracidad o falsedad, m ucho m ás am plios que los m eros “ verdadero” y “ falso” . En un sist em a deduct ivo se dist ingue enunciados “ de entrada” y enunciados “ de salida” . El obj et ivo de t odo sist em a m anej ador de una lógica difusa es describir los grados de los enunciados de salida en t érm inos de los de entrada. Más aún, algunos sistem as son capaces de refinar los grados de veracidad de los enunciados de salida conform e se refinan los de los de ent rada. Por est as propiedades es que ciertos sistem as de lógica difusa aparent an una labor de aprendizaj e, y son excelent es m ecanism os de cont rol de procesos. Desde el punt o de vist a t ecnológico, la lógica difusa se encuadra en el área de la llam ada I nt eligencia Art ificial y ha dado origen a sist em as de t ipo difuso y a sistem as de control autom ático.
3 .3 . CON JUN TOS DI FUSOS.
para un obj et o cualquiera, en un universo dado, si acaso éste pertenece o no al conj unt o. La decisión, nat uralm ent e, es “sí pert enece” o bien “no
pert enece” . Por ej em plo, considerem os com o universo a la población
económ icam ent e act iva en México, es decir, al conj unto form ado por las
m ás cercano a 1 t anto m ás estará el elem ent o en el conj unt o y en t ant o el grado de pertenencia sea m ás cercano a 0 t ant o m enos estará el elem ent o en el conj unt o.
3 .4 . CÁLCULO PROPOSI CI ON AL DI FUSO.
Recordam os que Got t fried Wilhelm plant eó en el s. XVI I la necesidad de un calculus rat iocinat or que sería un sist em a con un propio form alism o que perm it iera la definición sim bólica de enunciados, en concordancia con las leyes de la lógica, para descubrir nuevas o bien para verificar com o verdaderas a tesis postuladas com o tales. Por lo m enos desde ent onces se reconoció la relevancia del m anej o ( procesam ient o) sim bólico de enunciados lógicos. George Boole y Got t lob Frege cont ribuyeron de m anera not abilísim a en el origen m ism o del razonam ient o aut om át ico. Más, desde la perspect iva de la lógica difusa, en los antecedentes es necesario m encionar a Jan Lukasiewicz. En su sist em a t rivaluado, si a los valores de verdad Falso, Desconocido y
Verdadero se les representa, respectivam ente, por los valores
num éricos 0, ½ y 1, entonces las nociones de com plem ent o n(x)=1−x,
conj unción c(x,y)=min(x,y) y disyunción d(x,y)=max(x,y), corresponden a la definición intuitiva de esos conectivos lógicos. Este sistem a t rivaluado ent raña, una noción de definición. En un cálculo proposicional difuso se t iene una definición de proposiciones prim itivas, o “ atóm icas” , una serie de conectivos lógicos y reglas definidas de “ buena definición” de proposiciones “ com puest as” a part ir de las at óm icas. Cada proposición puede asum ir un valor de verdad que puede ser Falso, o
Verdadero o alguno ot ro ” ent re” esos dos valores extrem os de verdad.
de verdad de la proposición result ant e de él en t érm inos de los valores de verdad de las proposiciones que com ponen a esa proposición result ant e. Result an ent onces problem as “ de deducción” ( dado que los valores de las proposiciones atóm icas quedan caracterizados, se ha de caracterizar los de proposiciones com puest as part iendo de ellas) y “ de inferencia” ( dado que los valores de las proposiciones com puest as han sido observados, se ha de form ular y adem ás probarlas, respect o a los valores de las proposiciones at óm icas involucradas que debieron dar origen a los valores observados) .
3 .5 . DEFI N I CI ON ES BÁSI CAS DE LA LÓGI CA DI FUSA.
Grado de M em bresía. El grado de m em bresía puede ser represent ado por una función cont inúa, donde podem os decir, que el grado del valor de una figura sat isface el concept o lingüíst ico del térm ino de la variable lingüíst ica se le llam a grado de m em bresía. Para una variable continua este grado se expresa por una función m at em át ica llam ada función de m em bresía. La figura 3.6., m uestra algo sem ej ante a una función de m em bresía ; y puede notarse que una tem peratura de 39 0C es evaluada diferent e a una t em perat ura de 38.9 0C, j ust am ent e con un pedazo pequeño y no com o un um bral.
1
0
36 0C 37 0C 38 0C 39 0C 40 0C 41 0C 42 0C µcd(X)
Figura 3.6. El grado de m em bresía μCD( x) con una t em perat ura x que pert enece por ej em plo al conj unt o de pacient es con “ fiebre alt a” puede
ser expresado con una función cont inua.
c) ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎭ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎬ ⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎧ ≥ ≤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − ≤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − − ≤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − − ≤ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − ≤ = 4 4 3 2 2 4 2 3 2 2 2 4 2 2 1 2 2 1 2 2 4 3 2 1 x 0 x < x 2 x < x 2 1 x < x 2 1 x < x 2 x 0 ) , , , , ; ( μ μ μ μ μ μ μ μ μ μ μ π x x x x x x x x x x x x x x x x x
Figura 3.7. Funciones de m em bresía. a) Form a Triangular. b) Form a t rapezoidal. c) Form a cam pana.
Universo de discusión. Es el rango de t odos los posibles valores aplicables a una variable de un sist em a.
Ent rada Real. Son las ent radas provenient es del m undo ext erior hacia el sist em a difuso.
Et iquet a. Es el nom bre descript ivo usando para ident ificar una función de m em bresía.
3 .6 . ALGORI TMOS DI FUSOS DE TAKAGI - SUGEN O Y MAMDAN I .
Los algorit m os m as usados hast a nuest ros días son el algorit m o de Takagi - Sugeno y el algorit m o de Mam dani, la est ruct ura de cada uno de ellos se puede ver en la figura 3.8. [ 7,25] .
Algorit m o de Takagi- Sugeno. Algorit m o de Mam dani.
En los siguientes apartados se describirán con detalle y en form a general el algorit m o de Mam dani.
3 .7 . DESCRI PCI ÓN DEL ALGORI TM O DE MAMDAN I
3 .7 .1 . GEN ERACI ÓN DE VALORES DI FUSOS
El algorit m o de Mam dani const a de 3 etapas:
¾ Generación de valores difusos.
¾ Evaluación de reglas.
¾ Generación de valores reales.
A continuación se det alla cada et apa:
La Generación de Valores Difusos significa usar las funciones de m em bresía de las variables lingüíst icas ( variables lingüísticas de ent rada) , para evaluar el grado de validez o de m em bresía de cada t érm ino o et iquet a a un punt o específico de operación del proceso. El núm ero m ás com ún de et iquet as em pleadas para cada variable de un sistem a difuso es de 3, 5 y 7. El result ado de la generación de valores difusos es usado com o ent rada para la evaluación de reglas. [ 7]
Un ej em plo de la Generación de Valores Difusos es m ostrado en el [ apéndice C] .
3 .7 .2 . EVALUACI ÓN DE REGLAS.
acciones de las entradas difusas. Esto quiere decir, que cuando han sido convertido en variables a valores de variable lingüística, la evaluación de regla t am bién llam ada la inferencia difusa ident ifica la regla que se aplica la sit uación correcta, y evalúa los valores de las variables lingüísticas de salida.
Las evaluaciones de las reglas difusas son generadas por declaraciones “ SI - ENTONCES” , que describen las acciones a tom arse en respuest a de varias ent radas difusas.
Un ej em plo de Evaluación de Reglas y su obt ención es m ost rado en el [ apéndice C] .
El m ét odo usado aquí para la evaluación de las reglas se llam a inferencia “ MI N- MAX” , ya que tom a el m ínim o peso de los ant ecedent es para det erm inar el peso de las reglas, y el m áxim o peso de las reglas para det erm inar la salida difusa, las cuales son em pleadas en la ent rada del generador de valores Reales.
3 .7 .3 . GEN ERACI ÓN DE VALORES REALES.
El resultado producido de la evaluación de reglas es por supuest o difuso ( salidas difusas) , el cual es una expresión lingüíst ica que si la consideram os la salida de nuest ro cont rol, t endríam os el problem a de que nuest ro sist em a a controlar no pueda int erpret ar t al orden lingüíst ico, lo que hace necesario convertir estas salidas difusas en un valor real, a est o se le llam a Generación de Valores Reales. El cuál com bina todas las salidas difusas en un result ado específico para cada variable de salida, para est o se em plean diferent es m ét odos.
Los m étodos que m ás frecuentem ente se usan en la Generación de Valores Reales son los siguient es:
• Centro de Gravedad
• Cent ro de Gravedad por Singlet on
• Medio de Máxim o ( M o M )
• I zquierdo de Máxim o ( L o M )
• Derecho de m áxim o ( R o M )
A continuación se det alla cada uno de ellos.
∑
∑
= = ⋅ = b a x b a x x x x al Salida ) ( ) ( Re μ μ ( 3.2)Figura 3.10. Mét odo de cent ro de gravedad.
Mét odo de cent ro de área o cent ro de área por Singlet on.
Est e m ét odo es m uy parecido al utilizado por el m ét odo de cent ro de área solam ent e que es ut ilizado para funciones t ipo barra t am bién conocidas com o Singlet on.
∑
∑
= i i S S S ) ( ) ( 1 1 1 μ μ
Figura 3.11. Mét odo de cent ro de área o Singlet on.
Mét odo de m edio del m áxim o. En est e m ét odo la salida es el valor m edio del m áxim o.
Figura 3.12. Mét odo del m edio m áxim o.
a) b)
Figura 3.13. Método de a) derecha m áxim o y b) de izquierda m áxim o.
3 .8 . DESCRI PCI ÓN MÉTODO DE TAKAGI - SUGEN O.
Del diagram a a bloques del algorit m o de Takagi- Sugeno que se present ó en la figura 3.8., el bloque llam ado “ Ent rada Valores Reales” , “ Funciones de Mem bresía” , “ Generación de Valores Difusos” , “ Salidas Difusas” , sigue la m ism a secuencia que en el algorit m o de Mam dani, m ostradas en los apartados., 3.7.1., 3.7.2. La diferencia del m ét odo de Takagi- Sugeno radica en los bloques de “ Reglas” , “ Evaluación de Reglas” y “ Salidas Reales” t al y cóm o se m uest ra en la figura 3.14.
El bloque de evaluación de reglas, se hace m ediant e la siguient e ecuación [ 6] :
u(k)=u(k−1)+ae(k)−be(k−1) ( 3.4)
Con a = Kp+ Ki y b= Ki
Donde:
=
) (k
u Salida Real.
=
−1)
(k
u Salida Real Ant erior.
=
) (k
e Error Act ual
=
−1)
(k
e Error Ant erior.
Esta ecuación es conocida com o ecuación de diferencias. Tiene com o caract eríst ica principal que perm it e la sint onización por m ét odos convencionales, debido a que en ella se identifica claram ente una parte proporcional ( Kp ) y una part e int egral ( Ki ) .
Ot ra caract eríst ica de est a ecuación es que evaluándola se obt iene la salida real, sin necesidad de hacer la et apa de generación de valores reales com o en el caso del algorit m o de Mam dani. Cuando se t iene n funciones de m em bresía de ent rada, la salida es evaluada con la siguient e ecuación:
APLI CACI ÓN DE LOS ALGORI TMOS DE TAKAGI - SUGEN O Y MAMDAN I AL CON TROL DE VELOCI DAD DE UN MOTOR DE C.D.
4 .1 . DI SEÑ O DEL CON TROL DE VELOCI DAD TI PO TAKAGI -SUGEN O.
Debido al crecient e desarrollo de los algorit m os de cont rol de t ipo difuso y sus aplicaciones en diferent es aplicaciones de la indust ria, en este capitulo se describe la aplicación de los algorit m os de Takagi-Sugeno y Mam dani, así com o el diseño del control para sim ulación.
Para describir en est e apart ado com o se obtuvo el diseño, es necesario auxiliarnos de la figura 3.8., del capit ulo ant erior, en ella se puede ver que se necesit a una et apa de generación de valores difusos m ediant e funciones de m em bresía de entrada. Para la tesis se consideraran las funciones de m em bresía de t ipo t rapezoidal t al com o lo m uest ra la figura 4.1.
Las funciones de m em bresía que se m uest ran en la figura 4.1, fueron em pleadas y caract erizadas de la siguient e m anera:
¾ La abscisa corresponde al valor absoluto del error siendo este, el valor absolut o de la diferencia exist ent e ent re un valor de referencia real y un valor m edido real.
¾ La ordenada corresponde al grado de m em bresía del valor absolut o del error, siendo est e valor correspondiente a la salida difusa.
¾ “ BAJO” y “ ALTO” son las etiquetas de las funciones de m em bresía.
Una vez que se obt iene la salida difusa, se puede ver en la figura 3.8. que la siguient e et apa es la evaluación de reglas. Part iendo de la ecuación 3.4., del capít ulo anterior y considerando com o entrada el absoluto del error y dos funciones de m em bresía “ BAJO” y “ ALTO” se puede construir un cont rol difuso con el m odelo de Takagi- Sugeno com o sigue:
Si e(k) es baj o entonces
) 1 ( ) ( ) 1 ( )
( 1 1 1
1 k =u k− +ae k −be k−
u ( 4.1)
Si e(k) es alto entonces
) 1 ( ) ( ) 1 ( )
( 2 2 2
2 k =u k− +a e k −be k−
Para obt ener la salida real según la figura 3.8., del algorit m o de Takagi – Sugeno, se utiliza la ecuación 3.5., del capitulo 3 y se adapta para dos funciones de m em bresía alt o y baj o quedando:
) ( ) ( ) ( ) ( ) ( ) ( )
( 1 2
k k k k u k k u k u alto bajo alto bajo μ μ μ μ + +
= ( 4.3)
Con est e apart ado podem os const ruir el diagram a a bloques del regulador de frecuencia difuso t al y com o se m uest ra a cont inuación:
Figura 4.2. Diagram a a bloques del cont rol de velocidad t ipo Takagi-Sugeno.
¾ El bloque denom inado m ot or de c.d. cont iene las ecuaciones 2.2., 2.3., 2.5., 2.6., 2.7., 2.8., que definen la dinám ica del m ot or de c.d. con excit ación separada.
¾ El bloque denom inado Transduct or, cont iene el valor de Kt , que es una constante de proporcionalidad en donde se hace la conversión de un valor de velocidad ω de salida del bloque m ot or de c.d. y lo conviert e a un valor de voltaj e de c.d. ( conocido com o voltaj e m edido ( Vm ) , que es com parado con uno est ablecido llam ado Volt aj e de referencia ( Vref) .
¾ El bloque denom inado Regulador Difuso tipo Takagi- Sugeno
cont iene las ecuaciones 4.1, 4.2. y 4.3.
¾ El bloque denom inado Excit ador, cont iene el valor de la const ant e de proporcionalidad Ke que convierte un valor de salida del Regulador Difuso a un valor de pot encia de ent rada para el bloque del Mot or de c.d. El valor de Kt depende de las características del m odelo em pleado para el m ot or de c.d. con excit ación separada.
Con lo ant erior podem os decir que la figura 4.2. sirve com o plat aform a para la sim ulación e im plem entación del regulador de velocidad.
4 .2 . DESCRI PCI ÓN DE LOS BLOQUES DEL PROGRAM A QUE EMPLEA EL CON TROL DE VELOCI DAD TI PO TAKAGI – SUGEN O.
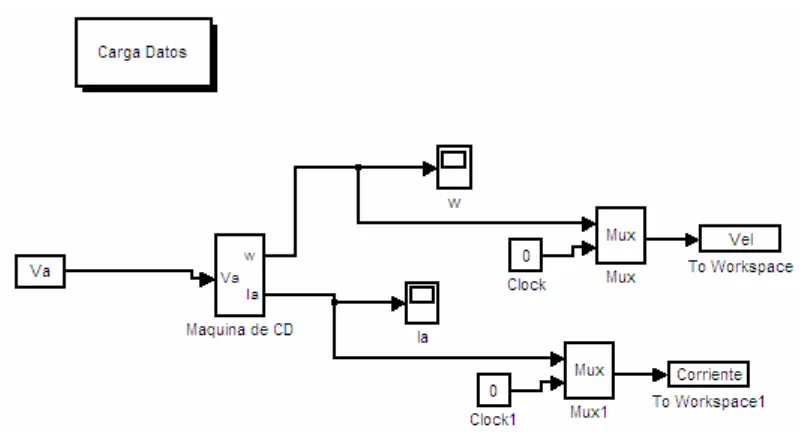
Sim ulink es una de las herram ient as m ás poderosas para sim ular sistem as dinám icos en el m undo académ ico e industrial. El program a se basa en la construcción de sistem as usando bloques funcionales, que pueden ser t om ados de las bibliot ecas del program a o creados por el usuario, en base a sus necesidades. Ut ilizando los bloques “ Scopes” y otros bloques de visualización, se puede ver la sim ulación m ientras ést a se está ej ecutando. Los resultados de la sim ulación pueden ser transferidos al espacio de trabaj o de Mat lab para su procesam ient o y visualización.
A continuación se m uestra y se describe el program a que em plea el algoritm o de control difuso de Takagi- Sugeno para regular la velocidad de un m ot or de c.d. con excit ación separada.
4 .2 .1 . BLOQUE DEN OMI N ADO “CARGA DATOS.”
Figura 4.4. Bloque de Sim ulink “ Carga Dat os” .
Est e bloque carga los dat os pre- det erm inados del sist em a, cóm o las característ icas del m ot or, de las funciones de m em bresía y los dist int os parám et ros est ablecidos para considerar en la m edición; enlaza a SI MULI NK con el archivo de dat os denom inado ini.m, hecho en el program a de Mat lab. Est e archivo cont iene t odas las variables que se utilizaran durante el proceso de sim ulación y, por necesidad tiene que ser cargado antes de cada sim ulación, [ Apéndice A] .
4 .2 .2 . DESCRI PCI ÓN DEL BLOQUE “MOTOR DE CD”.
Figura 4.5. bloque de Sim ulink “ Mot or de c.d.”
Est e bloque es una m áscara de un subsist em a; pues cont iene bloques int ernos que describen est e proceso, com o se m uestra en la figura 4.6.
Figura 4.6. Const itución del bloque “ Mot or de c.d.”
A continuación se detalla cada bloque:
Figura 4.7. Bloques con valores de par de carga
Figura 4.8. Bloque sum ador.
El bloque de la Figura 4.8., contiene un valor de ent rada del valor de volt aj e “ Va” ( + ) y la salida del bloque de la const ant e “ K” ( - ) que est á dada por la función La1* I 1. El valor a la salida del bloque sum ador “ Sum 1” es la ent rada al siguient e bloque: “ Transfer Fcn.”
Figura 4.9. Bloque “ Transfer Fcn” .
Est e bloque cont iene a la ent rada el valor proveniente del bloque “ Sum 1” , éste valor entra al bloque que contiene la función de
transferencia
Ra s Laa. +
1
, vinculada a la corrient e de arm adura, para una
Figura 4.10. Bloque sum ador “ Sum 2” .
Est e bloque en funcionam ient o es sim ilar al de la figura 4.8. con la ent rada del bloque de la función constante “ K” ( + ) y el valor del par de carga ( - ) , perm it e sim ular en un t iem po específico la entrada al sistem a de un valor de par de carga, la salida de est e bloque es un valor de ent rada para el siguient e bloque “ Transfer Fcn1” .
Figura 4.11. Bloque Transfer Fcn1.
El valor de ent rada de est e bloque, es la salida del bloque “ Sum 2” ,
est e bloque cont iene la función de t ransferencia
B s J. +
1
, vinculada a la
4.8., así m ism o es una salida de la m áscara del sist em a “ w” de la figura 4.5.
Los bloques para visualización se pueden ver en la figura 4.12. Estos bloques presentan las gráficas del com portam iento del sistem a sim ulando un osciloscopio.
Figura 4.12. Bloques que sim ulan osciloscopios.
Los bloques para realizar gráficos se pueden ver en la figura 4.13. El bloque “ Mux” obt iene un valor del sist em a a la ent rada y un valor de t iem po, sim ulando un m ult iplexor, ent rega a la salida la com binación de est os que ent ran al bloque “ current ” que envía los datos al wokspace del program a de Mat lab, donde son guardados en un archivo con ext ensión
.m y que son usados para crear gráficas del com port am ient o del
sistem a. Las gráficas de la sim ulación se m uest ran en el capit ulo 5.
4 .2 .3 . DESCRI PCI ÓN DE LOS BLOQUES Ke Y Kt QUE CON TI EN EN LAS CON STAN TES DE PROPORCI ON ALI DAD.
Figura 4.14. Bloque “ Ke” .
Ke: Est e bloque cont iene una const ante de proporcionalidad, que podría
ser por ej em plo, el equivalente al trabaj o que se realizaría en una et apa de pot encia, la cuál sería la encargada de producir los niveles de volt aj e y corriente necesarios para operar la velocidad del m ot or de c.d.
Est a const ant e va en función de la capacidad de la m áquina de c.d., la entrada del bloque es 0–5 volts y una salida de 0- 120 volts ó 0- 240 volt s, dependiendo del m otor que se esté usando ( Ver apéndice A) .
Para un ej em plo práct ico sírvase de las referencias [ 5, 7, 27] .
Figura 4.15. Bloque “ Kt ” .
Kt: Est e bloque cont iene una const ante de proporcionalidad. Para el
La entrada al bloque corresponde a la velocidad real del rotor. Su salida es un valor proporcional de volt aj e equivalent e a la velocidad real del rotor. Est e valor de salida se puede int roducir por ej em plo, a una tarj et a de aplicación con m icrocont rolador para ser m anipulada en una im plem ent ación.
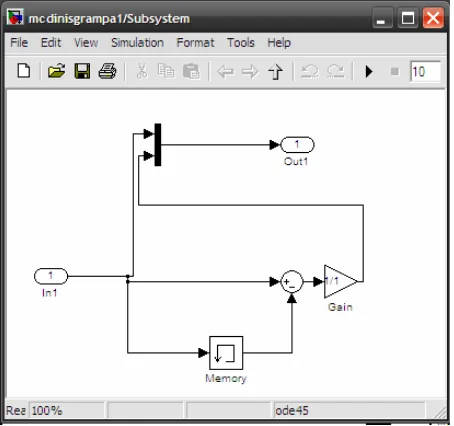
4 .2 .4 . DESCRI PCI ÓN DE LOS BLOQUES QUE SI MULAN EL ARRAN QUE TI PO RAMPA.
Figura 4.16. Conj unt o de bloques para sim ular el arranque t ipo ram pa.