I
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
“ESTUDIO DE LOS ESQUEMAS D
E MODULACIÓN Y
CODIFICACIÓN DE CANAL
APLICADOS A LTE”
TRABAJO DE TESIS
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTAN:
Carlos Alejandro Solis Ornelas
Nidia Cerecedo Torres
Oswaldo Estrada Arrenchú
ASESORES:
II
AGRADECIMIENTOS
A mi familia, que siempre me ha brindado su apoyo incondicional. Por su constante preocupación por mi bienestar y depositar toda su confianza en mí. Por aquellos domingos estresantes. Todos cooperaron en muchos aspectos para que este proyecto de cinco años se materializara. Los grandes y pequeños detalles jamás los olvidaré. Los quiero.
OswaldoEstrada Arrenchú
A mis padres, por ser mi principal motivación para concluir una de mis grandes metas y con ello agradecer el apoyo, educación y todas las comodidades brindadas que han hecho posible todo lo que he logrado.
A mi hermano, por ser mi ejemplo e inculcar en mí un concepto de superación constante sin importar las circunstancias, por siempre estar ahí y brindarme el mejor de los consejos.
Nidia Cerecedo Torres
A mis padres y hermanos:
Por ser la causa de mi motivación durante mi estancia en la institución, por reanimarme cuando las cosas parecían ponerse difíciles, por confiar en mí, por esperar este día tanto como yo lo he esperado y porque sé que ellos serán siempre mi fortaleza y mis energías para seguir adelante en los proyectos futuros.
A Dios:
Porque sin Él nada de lo que he logrado lo tendría, porque he aprendido tanto de Él que no encuentro las palabras para agradecerle este momento y porque es mi escudo y protección ante las situaciones difíciles.
A mis compañeros y profesores:
Porque han hecho de mi estancia en la institución un lugar más agradable, porque me han brindado su confianza y apoyo, lo que ha hecho de mí una mejor persona; gracias a ellos he encontrado en mi la persona que tanto buscaba y la misma que me ha demostrado de lo que soy capaz.
Carlos Alejandro Solis Ornelas.
III TABLA DE CONTENIDO
ÍNDICE DE TABLAS... VIII LISTA DE ACRÓNIMOS ... IX OBJETIVO GENERAL ... XII JUSTIFICACIÓN ... XIII INTRODUCCIÓN ... XIV CAPÍTULO I. GENERALIDADES DE LOS SISTEMAS DE COMUNICACIONES
DIGITALES ... 1
1.1.- Elementos básicos de un sistema de comunicaciones digitales ... 2
1.2.- Propagación de la información en medios guiados y medios no guiados ... 4
1.2.1.- Medios guiados ... 4
1.2.2.-Medios no guiados ... 4
1.2.2.1.- Bandas de frecuencia usadas en las comunicaciones inalámbricas ... 6
1.3.- Características de la propagación inalámbrica ... 7
1.3.1 Fenómenos de la propagación inalámbrica ... 7
1.3.1.1.- Reflexión ... 7
1.3.1.2.- Refracción ... 8
1.3.1.3.- Difracción ... 9
1.3.1.4.- Efectos multitrayectoria ... 10
1.3.2.- Desvanecimientos ... 11
1.3.2.1.- Desvanecimientos lentos ... 11
1.3.2.2.- Desvanecimientos rápidos ... 12
1.3.2.3.- Desvanecimientos planos ... 12
1.3.2.4.- Desvanecimientos selectivos ... 13
1.4.- Ruido e interferencias ... 14
1.4.1.- Ruido AWGN ... 14
1.4.2.- Ruido térmico ... 15
1.4.3.- Interferencias ... 16
1.4.4.- Relación señal a ruido (SNR) ... 16
IV
1.4.6.- Relación señal a ruido-interferencia (SNIR) ... 17
1.4.7.- Tasa de bit erróneo (BER) ... 18
1.4.8.- Tasa de error de Símbolo (SER) ... 18
CAPÍTULO 2. MODULACIÓN DIGITAL Y CODIFICACIÓN DE CANAL ... 19
2.1- Modelos de canal ... 22
2.1.1- Canal binario simétrico ... 22
2.1.2.- Canal AWGN continuo en tiempo ... 23
2.1.3.- Canal AWGN discreto en tiempo ... 24
2.2.- Modulación digital ... 25
2.2.1.- Phase Shift Keying (PSK) ... 28
2.2.2. Frequency Shift Keying (FSK)... 31
2.2.3.- Amplitude Shift Keying (ASK)... 32
2.2.4-. Esquemas en cuadratura ... 33
2.3.- Tipos de códigos para la corrección de errores ... 35
2.3.1.- Códigos Bloque ... 35
2.3.2.- Códigos Cíclicos ... 38
2.3.3.- Reed-Solomon ... 40
2.3.4.- Convolucionales ... 42
2.3.4.1.- Diagrama de Trellis ... 44
2.3.4.2.- Algoritmo de Viterbi ... 48
2.3.4.3.- RSC (Convolucional Sistemático Recursivo) ... 51
2.4.- Turbo Códigos ... 53
2.4.1.- Entrelazadores ... 57
2.4.2.- Decodificación en los Turbo códigos ... 61
2.5.- LDPC ... 66
CAPÍTULO 3. LTE ... 68
3.1.- Arquitectura de LTE ... 71
3.2.- Canales en LTE ... 74
3.2.1.- Características del canal compartido del enlace de bajada ... 78
3.2.1.1.- Operación con distintos esquemas de modulación ... 79
V
3.3.1. QPSK, 16-QAM, 64-QAM ... 80
3.4.- Modulación y codificación adaptiva en LTE ... 83
CAPÍTULO 4. SIMULACIONES Y RESULTADOS ... 84
4.1.- Parámetros y condiciones del ambiente de simulación ... 85
4.2.- Resultados ... 91
4.3.- Conclusiones ... 97
VI
ÍNDICE DE FIGURAS
CAPÍTULO 1
Figura 1. Diagrama simplificado de un sistema de comunicación digital.. ... 2
Figura 2. Trayectorias usadas en la trasmisión de ondas electromagnéticas. ... 5
Figura 3. Esquema básico del fenómeno de reflexión. ... 8
Figura 4. Esquema del fenómeno de refracción. ... 9
Figura 5. Esquema del fenómeno de difracción. ... 10
Figura 6. Ejemplo del fenómeno multitrayectoria. ... 10
Figura 7. El canal es plano si su ancho de banda es mayor al de la señal. ... 13
Figura 8. El canal es selectivo si su ancho de banda es menor al de la señal. ... 14
CAPÍTULO 2 Figura 9. Diagrama de eficiencia del ancho de banda de un sistema ideal. ... 21
Figura 10. Canal Simétrico Binario. ... 22
Figura 11. Representación gráfica de un canal AWGN de tiempo discreto. ... 24
Figura 13. Espectro de la magnitud de una señal banda base. ... 26
Figura 14.Espectro de la magnitud de una señal modulada de doble banda lateral. ... 26
Figura 15. Rotación de un vector de t2 a t1. ... 28
Figura 16. Ejemplo de PSK ... 29
Figura 17. Regiones de decisión. ... 30
Figura 18. Cambios de frecuencia por cada transmisión de símbolo. ... 32
Figura 19. Correspondencia entre un estado de máxima amplitud y un punto en el origen. ... 32
Figura 23. Estructura de la palabra código sistemática... 35
Figura 24. Codificador convolucional. ... 43
Figura 25. Circuito convolucional. ... 45
Figura 26. Diagrama de estados de un circuito convolucional. ... 46
Figura 27. Diagrama de Trellis. ... 47
Figura 28. Uso del algoritmo de Viterbi en un estado actual y siguiente en el diagrama de Trellis. 49 Figura 29. Ejemplo de dos posibles inicios de trayectoria una con ningún error y la otra con dos errores. ... 50
Figura 30. Codificador Convolucional convencional con r=1/2. ... 51
Figura 31. Codificador RSC obtenido del convolucional convencional. ... 52
Figura 32. Terminación de Trellis en un RSC. ... 52
Figura 33. Codificador general de un turbo código ... 54
Figura 34. Turbo Codificador especificado por 3GPP ... 55
Figura 35. Primer codificador convolucional de un Turbo Codificador. ... 56
Figura 36. Segundo codificador convolucional... 57
Figura 37. Desplazamiento de las direcciones de los 4 procesadores. ... 60
Figura 38. Desintercalador de los Turbocódigos. ... 61
VII
Figura 40. Decodificador MAP. ... 63
Figura 41. Métrica del estado siguiente. ... 64
Figura 42. Métrica de estado reverso. ... 65
Figura 43. Diagrama a bloques de un algoritmo MAP. ... 65
Figura 44. Ejemplo de una matriz de un LDPC donde n=20, m=15, j=3 y k=4. ... 66
Figura 45. Gráfica de Tanner para un código LDPC con una matriz de 8x4. ... 67
CAPÍTULO 3 Figura 46. Evolución de la telefonía móvil. ... 69
Figura 47. Esquema de la red LTE ... 71
Figura 48. Interfaz de radio LTE. ... 72
Figura 49. Flujo de paquete en el plano de control de LTE. ... 73
Figura 50. Enlaces de canales descendentes lógico, de transporte y físico. ... 75
Figura 51. Especificaciones del canal de transporte. ... 77
Figura 52. Enlace de bajada del canal compartido. ... 79
Figura 20. Diagrama de constelación para QPSK. ... 80
Figura 21. Diagrama de constelación para 16-QAM. ... 81
Figura 22. Diagrama de constelación para 64QAM. ... 82
Figura 53. Diagrama a bloques del sistema AMC. ... 83
CAPÍTULO 4 Figura 54. Bloques de las operaciones que se llevarán a cabo en la simulación. ... 86
Figura 55. Turbo código LTE para 4 QAM ... 91
Figura 56. Turbo código LTE para 16-QAM. ... 92
Figura 57. Turbo código LTE para 64-QAM. ... 93
Figura 58. Turbo código vs Convolucional (4QAM). ... 94
Figura 59. Turbo código 1 iteraciones (16-QAM 64-QAM). ... 95
Figura 60. Turbo código 5 iteraciones (16-QAM 64-QAM) ... 96
VIII
ÍNDICE DE TABLAS
CAPÍTULO 1
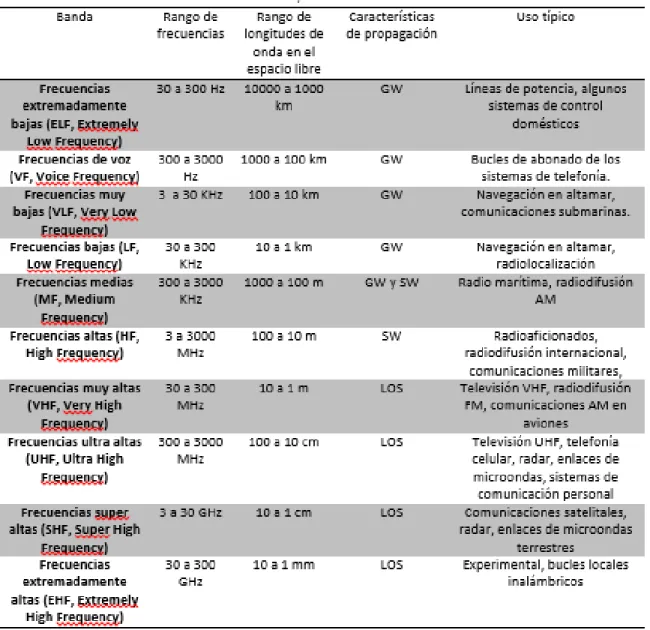
Tabla 1 Uso del espectro de radio. ... 6
CAPÍTULO 2 Tabla 2. Polinomios generadores crc ... 39
Tabla 3 Parámetros de los códigos BCH. ... 40
Tabla 4 Polinomios generadores de los códigos BCH. ... 40
Tabla 5 Parámetros que constituyen a los códigos Reed Solomon. ... 41
Tabla 6 Respuesta al impulso en la decodificación de los códigos Convolucionales. ... 44
Tabla 7 Intercalador QPP. ... 59
CAPÍTULO 3 Tabla 8 Velocidades de transmisión de diferentes estándares ... 70
IX
LISTA DE ACRÓNIMOS
3GPP - Third Generation Partnership Project
AMC - Adaptive Modulation Code
ARQ - Automatic Repeat reQuest
ASK - Amplitude Shift Keying
AWGN - Additive White Gaussian Noise
BCH - Broadcast CHannel
BER - Bit Error Rate
BPSK - Binary Phase Shift Keying
CAT5, CAT6, CAT7 - Categorias 5, 6 y 7
CCCH - Common Control CHannel
CDMA - Code Division Multiple Access
CQI - Channel Quality Indicator
CRC - Cyclic Redundancy Check
DC - Direct Current
DCCH - Dedicated Control CHannel
DCI - Downlink Control Information
DL-SCH - DownLink Shared CHannel
DTCH - Dedicated Traffic CHannel
EDGE - Enhanced Data Rates for GSM Evolution
EHF - Extremely High Frequency
ELF - Extremely Low Frequency
eNode-B - Evolved Node B
EPC - Evolved Packet Core
E-UTRAN - Evolved Universal Terrestrial Radio Access Network
FEC - Forward Error Correction
FSK - Frequency Shift Keying
GPRS - General Packet Radio Service
GSM - Global System for Mobile Communications
GW - Ground Wave
H-ARQ - Hybrid Automatic Repeat reQuest
HF - High Frequency
HSDPA - High-Speed Downlink Packet Access
HSPA - High Speed Packet Access
IP - Internet Protocol
LDPC - Low Density Parity Check
LED - Light Emission Diode
LF - Low Frequency
LLR - Log-Likelihood Ratio
LOS - Line of Sight
LTE - Long Term Evolution
MAC - Medium Access Control
X
MBSFN - Multicast-Broadcast Single-Frequency Network
MCH - Multicast Channel
MF - Medium Frequency
MIMO - Multiple Input Multiple Output
MM - Multi Mode
MME - Mobility Management Entity
MTCH - Multicast Traffic CHannel
OFDM - Orthogonal Frequency Division Multiplexing
PBCH - Physical Broadcast Channel
PCCH - Paging Control CHannel
PCFICH - Physical Control Format Indicator CHannel
PDCCH - Physical Downlink Control CHannel
PDCP - Packet Data Convergence Protocol
PDN GW - Packet Data Network Gateway
PDSCH - Physical Downlink Shared Channel
PHICH - Physical Hibrid Indicator Channel
PHY - Physical Layer
PMCH - Physical Multicast CHannel
PSK - Phase Shift Keying
QAM - Quadrature Amplitude Modulation
QoS - Quality of Service
QPP - Quadratic Permutation Polynomials
QPSK - Quadrature Phase Shift Keying
RLC -Radio Link Control
ROHC - RObust Header Compression
RRC - Radio Resource Control
RS - Reed-Solomon
RSC - Recursive Systematic Convolutional
SAP - Service Access Point
SER - Symbol Error Rate
Serving GW - Serving GateWay
SHF - Super High Frequency
SIR - Signal to Interference Ratio
SM - Single Mode
SNIR - Signal to Noise plus Interference Ratio
SNR - Signal to Noise Ratio
STP - Shield Twisted Pair
SW - Sky Wave
UE - User Equipment
UHF - Ultra High Frequency
UMTS - Universal Mobile Telecommunications System
UTP - Unshield Twisted Pair
VF - Voice Frequency
XI
VLF - Very Low Frequency
VTN - Voltage Termic Noise
WCDMA - Wideband Code Division Multiple Access
XII
OBJETIVO GENERAL
XIII
JUSTIFICACIÓN
Debido a la creciente demanda de altas tasas de transferencia de datos en la telefonía celular para servicios móviles tales como VoIP, motores de búsqueda web, redes sociales,
streaming de video y audio de alta calidad, se ha desarrollado LTE, tecnología de cuarta generación que permite una alta tasa de transferencia cuyas técnicas empleadas son OFDM, codificación de canal de alta eficiencia, modulación adaptiva y MIMO.
XIV
INTRODUCCIÓN
Los recientes avances tecnológicos en los sistemas inalámbricos de comunicación ofrecen cada vez mayor portabilidad, movilidad y accesibilidad. Aunque la comunicación alámbrica brinda más estabilidad, mejor funcionamiento y mayor confiabilidad, tiene el inconveniente de estar limitada por el entorno geográfico. En el caso de las comunicaciones alámbricas las características y calidad de la transmisión están determinadas tanto por el tipo de señal como por las especificaciones del medio, que en sí mismo es lo que más limitaciones impone a la transmisión. Lógicamente, las personas eligen libertad en lugar de confinamiento. Por tal motivo la industria de la telefonía celular ha crecido enormemente en los últimos diez años. Sin embargo, las comunicaciones móviles tienen condiciones muy exigentes para establecer un enlace, por lo que el medio de comunicación obliga al uso de técnicas robustas y modernas de codificación.
En todo sistema de comunicación inalámbrica se requiere que a los bits de información a transmitir sean agregados bits de redundancia con la finalidad de corregir posibles bits erróneos en el receptor. Algunos esquemas de codificación de canal están desarrollados para recuperar el valor correcto de cada bit de la información enviada; de acuerdo al tipo de aplicación al que esté destinado el sistema de comunicación se elige un determinado esquema de codificación que satisfaga las necesidades de canal. Los algoritmos que más atención han tenido en los últimos años han sido los LDPC y los Turbo Códigos. Son algoritmos concebidos hace muchos años pero debido a su complejidad no se habían implementado. Ambos algoritmos presentan correcciones de errores sorprendentes, sin embargo los LDPC implican más tiempo de decodificación, por lo cual que se optó por usar Turbo Códigos en LTE.
El objetivo de LTE es proporcionar altas tasas de transmisión, baja latencia, adaptabilidad en el ancho de banda e interoperabilidad. Todo esto lo logra aunando tecnologías emergentes y ya desarrolladas, las cuales son empleadas por las redes 3G. En este trabajo se considerarán la codificación de canal y la modulación usados en la tecnología LTE. Se crearán programas en MATLAB para estudiar los efectos producidos en los distintos esquemas de modulación con respecto a la tasa de bit erróneo, considerando un modelo de canal AWGN.
XV En el segundo capítulo se estudiarán en forma general las distintas técnicas de modulación digital y de codificación de canal. En este capítulo se pone especial interés al estudio de los Turbo Códigos que son la técnica de codificación de canal principal propuesta para LTE.
El tercer capítulo es una semblanza general de las funcionalidades y ventajas de LTE, así como un estudio de los distintos canales que lo componen, dándole mayor importancia a los canales donde la modulación y codificación de canal se desarrollan. En la parte final del capítulo tres se escribe, de manera específica, las técnicas de modulación y codificación empleadas en LTE, y la forma en que estas operan al considerar las condiciones del canal de comunicaciones.
1
CAPÍTULO I. GENERALIDADES DE LOS SISTEMAS
2
1.1.- Elementos básicos de un sistema de comunicaciones digitales
En los últimos años la demanda de acceso a la información digital ha crecido significativamente. En nuestra vida diaria las telecomunicaciones se han vuelto imprescindibles para nuestro desarrollo personal, social y profesional. Aunque todos los sistemas de comunicación como telefonía, televisión, radio, internet, etc., parezcan diferentes a simple vista, todos tienen un objetivo en común: Transmitir información de un punto a otro.
De la forma más general en un sistema de comunicación, se consideran tres elementos fundamentales: transmisor, canal y receptor. El transmisor se encarga de transformar la señal de información a una forma adecuada para ser transportada en algún medio de trasmisión (canal) como cable, aire, fibra óptica o el espacio exterior. El receptor tiene la tarea principal de actuar sobre la señal recibida de manera que pueda reconstruir una forma reconocible de la señal del mensaje original, considerando que la señal recibida está atenuada y distorsionada debido a la naturaleza ruidosa del canal.
Para que cada uno de los tres elementos fundamentales de la comunicación logre sus respectivos objetivos se debe considerar una serie de procesos tal y como se puede observar en la Figura 1 donde se muestra un diagrama de bloques general de un sistema de comunicación.
Figura 1. Diagrama simplificado de un sistema de comunicación digital.
Fuente
3 como un flujo de valores aleatorios gobernados por alguna función de distribución de probabilidad. Cada fuente tiene una medida de la información que representa, la cual puede ser cuantificada en términos de entropía.
Codificador de fuente
El promedio de información generada o transmitida por la fuente se define como entropía, expresada matemáticamente por la ecuación (1.1).
= ∑ log
≤
=
.
Por lo tanto la entropía proporciona el mínimo número de bits necesarios de información a transmitir, si la tasa de transmisión de la fuente es mayor a la entropía de la fuente entonces el codificador de fuente mapea los símbolos generados por la fuente a palabras código para después mediante el empleo de un codificador en específico sea removida la redundancia. Dicho de otro modo, la codificación de canal lleva a cabo la compresión de información removiendo redundancia.
Codificador de canal
Es el primer paso en el proceso de corrección o detección de errores.
La codificación de canal agrega redundancia al flujo de símbolos entrantes al sistema con la finalidad de corregir los errores introducidos por el canal.
Parece incoherente remover redundancia con el codificador de fuente y posteriormente agregar redundancia en el codificador de canal. Sin embargo, la redundancia en la fuente depende de ésta de una forma no estructurada y puede no proporcionar protección uniforme a la información, no hay forma de que indique cómo ocurren los errores o el cómo corregirlos. Por el otro lado, la redundancia debido a la codificación de canal es introducida de una manera estructurada, precisamente para tener control de errores.
Debido a la redundancia introducida por el codificador de canal, hay más símbolos en la salida que en la entrada del codificador. Generalmente, un codificador de canal acepta un bloque de entrada de k símbolos y genera un bloque de salida de n símbolos, con n>k. La tasa de un codificador de canal es: R=k/n. Por lo tanto R<1.
Modulador
4 onda bandabase. Sin embargo para una aplicación que involucra transmisión RF, como en el caso de LTE, también se requiere de una modulación pasabanda. Para estos casos el medio requiere de una forma de onda pasabanda sit , do de i= ,….,M. El término
pasabanda es usado para indicar que la frecuencia de la onda en bandabase gi(t) es trasladada por una onda portadora a una frecuencia mucho mayor del contenido espectral de gi(t). Como Si(t) se propaga sobre el canal, ésta señal es impactada por las características
del canal, las cuales pueden ser descritas en términos de la respuesta al impulso del canal hc(t). También, a lo largo de la trayectoria de la comunicación la señal es distorsionada por
el ruido. Por lo que la señal recibida r(t) es una versión corrompida de si(t).
1.2.- Propagación de la información en medios guiados y medios no
guiados
Para que se establezca una comunicación es necesario un medio para que la información viaje a través de este. De acuerdo a sus características físicas los medios de transmisión se clasifican en medios guiados y no guiados.
1.2.1.- Medios guiados
Son todos aquellos constituidos por un medio conductor que confina la señal de información, la cual puede viajar como un flujo de electrones o en forma de una señal luminosa.
1.2.2.-Medios no guiados
5 Ionosfera
Tierra
Antena Receptora Antena Transmisora A) Propagacion Superficial (debajo de los 2 MHz)
Tierra
Antena Receptora Antena Transmisora
Tierra
Antena Receptora Antena Transmisora
Señal
Señal
B) Propagacion Aerea (de 2 MHz a 30 MHz)
C) Propagacion de trayectoria visual (arriba de 30 MHz)
Señal
Figura 2. Trayectorias usadas en la trasmisión de ondas electromagnéticas.
A) En la propagación superficial la onda sigue la forma de la curvatura de la Tierra alcanzando distancias más allá de la línea del horizonte visual, sigue esta forma debido a dos factores, el primero es la difracción de la onda electromagnética, el segundo es la corriente que induce la onda electromagnética en la superficie terrestre que frena el frente de onda cerca de la superficie haciendo que éste se curve hacia abajo, adaptándose a la curvatura de la Tierra. Este efecto ocurre para frecuencias menores a 2MHz, un ejemplo de este tipo de propagación es la radiodifusión de AM. Estas ondas no pueden penetrar capas más altas que la atmosfera debido a que las ondas electromagnéticas a estas frecuencias son dispersadas por la atmosfera.
B) La propagación área de una onda electromagnética consiste en el desplazamiento de una serie de saltos de la onda entre la ionosfera y la superficie terrestre debido a la refracción de la onda. Esta propagación es propia para ondas con frecuencias de más de 2MHz y menores o iguales de 30Mhz usado para servicios de radio aficionados y en las emisiones internacionales de radio comercial.
6
1.2.2.1.- Bandas de frecuencia usadas en las comunicaciones inalámbricas
Las bandas de frecuencias usadas en las comunicaciones inalámbricas están estandarizadas dependiendo de su uso. Tabla 1 muestra el espectro de radio para sus diferentes aplicaciones en las comunicaciones inalámbricas.
7
1.3.- Características de la propagación inalámbrica
La propagación inalámbrica permite al usuario la transmisión de información por medio de ondas electromagnéticas. Esto es esencial para los sistemas de comunicaciones móviles donde, tanto el transmisor como el receptor pueden o no estar cambiando de posición durante el proceso de comunicación o en sistemas donde el uso de un medio guiado no es factible o prácticamente imposible, por ejemplo un sistema de comunicaciones satelital.
1.3.1 Fenómenos de la propagación inalámbrica
So a uellas afe ta io es ue suf e la señal al momento de viajar por el canal de transmisión, siendo estos los que modifican nuestra señal original y ocasionando distintos problemas inesperados al momento de que el receptor reciba la señal original.
1.3.1.1.- Reflexión
Cuando una onda electromagnética incide sobre una superficie, refleja parte de la onda como se puede ver en la Figura 3. El ángulo que se forma entre la superficie y una línea perpendicular imaginaria se le conoce como ángulo de incidencia (
α
1). La líneaperpendicular imaginaria se le conoce como normal, dicha línea solo sirve como una herramienta para la medición de los ángulos. El ángulo que se forma entre la onda reflejada y la normal se le conoce como ángulo de reflexión (
α
2). En la Ley de la Reflexión se establece8
Ángulo de incidencia Ángulo de reflexión
Onda incidente Onda reflejada Normal
Superficie reflectora
α1 α2
Figura 3. Esquema básico del fenómeno de reflexión.
1.3.1.2.- Refracción
Cuando una onda electromagnética toca el límite entre 2 superficies, parte de la onda es reflejada con el mismo ángulo de incidencia, la otra parte de la onda cruza el límite penetrando la segunda superficie (ver Figura 4).
Cuando la onda incide sobre la superficie con un ángulo de 90 grados, la onda penetra totalmente la superficie. Cuando la onda penetra en la superficie con un ángulo menor a 90 grados, onda no penetra la superficie, sino se desvía. A esta desviación de la onda se le conoce como refracción.
La ley de Snell (o ley de la refracción) dice que el producto del índice de refracción de la onda incidente por el seno del ángulo de la onda es igual al producto del índice de refracción de la superficie por el seno del ángulo de la onda refractada. Ecuación (1.2).
= (1.2)
El ángulo de refracción de la onda depende del índice de refracción de los materiales. Para el ángulo de refracción tenemos los siguientes 3 casos:
1. Si el índice de refracción del material (n1) de la onda incidente es menor al índice de refracción del material de la superficie (n2), la onda se refracta en dirección a la normal.
9 2. Si el índice de refracción del material de la onda incidente (n1) es mayor al índice de refracción del material de la superficie (n2), la ondea se refracta en dirección contraria a la normal
n1>n2
3. Si el índice de refracción del material de la onda incidente (n1) es igual al índice de refracción del material de la superficie (n2), entonces la onda viajará sobre el plano de separación entre ambas superficies. A este ángulo se le conoce como ángulo límite y es el ángulo máximo de incidencia que requiere la onda para que se presente refracción.
Para que la onda sea reflejada siempre y no presente fenómeno de refracción se debe cumplir n1>n2, además, el ángulo de incidencia debe ser mayor al ángulo límite.
Ángulo de incidencia Angulo de reflexión
Onda incidente Onda reflejada
Normal
Vidrio
Onda Refractada
α1 α2
αR
n1
n2
Figura 4. Esquema del fenómeno de refracción.
1.3.1.3.- Difracción
10 ondas electromagnéticas generando posible interferencia entre ellas afectando la señal final como se muestra en la Figura 5.
Figura 5. Esquema del fenómeno de difracción.
.
1.3.1.4.- Efectos multitrayectoria
Cuando la señal es enviada por un sistema donde el transmisor y el receptor están alineados directamente, siguiendo una trayectoria visual punto a punto, se puede decir que no hay obstáculos en el medio. Esto es habitual en sistemas satelitales y de microondas, sin embargo, en los sistemas de telefonía móvil, el envío de la señal desde el transmisor al receptor la señal puede sufrir reflexión por diversos obstáculos, siendo así que el receptor recibirá distintas versiones de la señal original pero con distintos retardos. Depende de las distancias de las que la señal sea reflejada o enviada directamente lo que determinará si la señal final recibida será mayor o menor a la señal original. El realce o cancelación del efecto multitrayectoria es de suma importancia dentro de las comunicaciones móviles. La Figura 6 muestra un ejemplo de este efecto debido a la reflexión de la señal en distintos obstáculos.
Señal Señal latente 1
Señal latente 2
11
1.3.2.- Desvanecimientos
El desvanecimiento de una señal se interpreta como variación aleatoria de energía de la señal debido a los efectos multitrayectoria y a la difracción de la señal que sufre al viajar por el medio de transmisión cuyo efecto se ve reflejado en la recepción de la señal.
Existen dos tipos de desvanecimiento de la señal, los desvanecimientos a gran escala y los desvanecimientos a pequeña escala, los primeros representan una variación de la energía de la señal debido a que existe una distancia grande entre transmisor y receptor, debido a bosques, cerros, grupos de edificios, etc. y cuya señal transmitida se ve afectada principalmente por la reflexión. En cuanto a los desvanecimientos a pequeña escala representan la variación de la energía de la señal transmitida debido a pequeños cambios en la distancia (tan pequeño como media longitud de onda) entre transmisor y receptor en donde la onda transmitida se ve afectada principalmente por la dispersión.
1.3.2.1.- Desvanecimientos lentos
Los desvanecimientos lentos son una subclase de los desvanecimientos a pequeña escala cuyo efecto se basa en los desvanecimientos Doppler que es una consecuencia del desplazamiento de la terminal móvil lo que va a producir un desplazamiento en las frecuencias espectrales de la señal emitida por el transmisor, esto se ve reflejado en una distorsión de la señal.
El tiempo de coherencia de un canal de comunicaciones se define como el intervalo de tiempo de la respuesta al impulso del canal que permanece sin cambio Tc, con el inverso del desplazamiento Doppler se puede obtener este Tc.
Considerando a Ts como la duración del símbolo, se tiene que para un canal con desvanecimientos lentos se cumple la desigualdad (1.3).
T s T c (1.3)
12
1.3.2.2.- Desvanecimientos rápidos
Los desvanecimientos rápidos al igual que los desvanecimientos lentos pertenecen a la subclase de desvanecimientos a pequeña escala, son ocasionados por las reflexiones a las que está expuesta la onda de la antena transmisora, por otro lado en la antena receptora la señal que recibe se va a determinar por la suma de todas las reflexiones estas son debido a los obstáculos interpuestos entre estación base y estación móvil. Estas ondas que llegan a la antena van a tener diferente amplitud y fase, la variación de estos parámetros va a ser menor si los obstáculos están próximos a la antena receptora, los retardos que tienen las ondas debido a las reflexiones junto con el tiempo de duración del símbolo ayudan a determinar la similitud que tienen las ondas al momento de ser recibidas así por ejemplo se tiene que para cada retardo si es mucho menor que el tiempo de duración del pulso las ondas no serán muy diferentes. Si se considera que la terminal móvil está en constante movimiento se asegura que se tendrá interferencia constructiva e interferencia destructiva es decir una suma de ondas que tienen la misma fase y suma de ondas con diferente fase respectivamente.
Este tipo de desvanecimiento se modela usando una función de distribución de probabilidad Rayleigh la cual sirve para el diseño de un sistema de comunicaciones en ambientes urbanos.
1.3.2.3.- Desvanecimientos planos
Este tipo de desvanecimiento al igual que el desvanecimiento selectivo forma parte del fenómeno retardo por propagación.
Un desvanecimiento es plano se presenta cuando el ancho de banda de la señal es menor al ancho de banda de coherencia del canal, es decir, f0>W ya que trata a todas la señales
13
Figura 7. El canal es plano si su ancho de banda es mayor al de la señal.
El ancho de banda de coherencia del canal se refiere a la gama de frecuencias por las cuales la
espuesta e f e ue ia del a al tie e u o po ta ie to o sta te u a espuesta de fase
lineal, de tal manera que las características espectrales de la señal transmitida a través del canal se preservan.
1.3.2.4.- Desvanecimientos selectivos
Los desvanecimientos selectivos son caracterizados por los fenómenos de pequeña escala denominado retardo de propagación, se caracterizan por hacer una suma de todas las dispersiones en el tiempo debidas a los retardos de la propagación multitrayectoria, está a su vez es causado por los fenómenos de la propagación inalámbrica, de modo que dicha suma va a tener como efecto un filtrado selectivo en frecuencia. Esta selección en frecuencia del canal también es denominado ancho de banda de coherencia del canal y cuya selección va depender de una comparación del ancho de banda de la señal y de la inversa del retardo de propagación es decir se va a tener una medida estadística del ancho de banda del canal dejando pasar las señales con una ganancia y una frecuencia semejantes.
Por lo tanto se tendrá un desvanecimiento selectivo si el ancho de banda de la señal W es mayor que el ancho de banda del canal f0 (Ver Figura 8), el canal no conserva las
14
Figura 8. El canal es selectivo si su ancho de banda es menor al de la señal.
1.4.- Ruido e interferencias
De forma natural cada vez que el transmisor envía datos, el receptor recibe una señal diferente a la que originalmente fue enviada. Esto es provocado por la atenuación, interferencias y el ruido.
El ruido se define como toda aquella señal sin información que perturba la transmisión y su procesamiento. Las fuentes de ruido pueden ser internas y/o externas al sistema de comunicación.
1.4.1.- Ruido AWGN
15
2
1 1
( ) e x p 2 2 P n
n
(1.4)Donde �2 es la varianza de n. La normalización de la función de densidad gaussiana de media
cero se obtiene considerando que � = . La señal aleatoria es representada por la suma de la variable aleatoria gaussiana y una señal de DC, así z=a+n, donde a es la componente de la señal de DC.
Así, el resultado será laecuación (1.5).
2
1 1
( ) e x p 2 2 P z
z
a
(1.5)1.4.2.- Ruido térmico
Se genera por el movimiento de los electrones en un conductor y como consecuencia produce calor. Por lo tanto, el ruido térmico son todas aquellas señales eléctricas indeseadas que están naturalmente presentes en todo sistema eléctrico.
En los sistemas de comunicaciones principalmente es producido entre la antena y el receptor debido al acoplamiento existente entre ellos. El ruido térmico es modelado como un proceso de ruido aditivo blanco gaussiano (AWGN).
El valor medio cuadrático del voltaje del ruido térmico VTN que se genera en las terminales del resistor (impedancia de acoplamiento) el cual está dado por la ecuación (1.6).
2 2
4
T N
E
V
k T RfV
(1.6)
Donde:
K ≡ Constante del Boltzman (k=1.38x10-23 J°K,)
T ≡ Temperatura absoluta en grados Kelvin
16
∆ ≡ Ancho de banda.
Bajo la condición de acoplamiento la potencia que se produce en la fuente se divide igualmente entre la resistencia de la fuente y la resistencia de la carga. Al aplicar el teorema de máxima transferencia de potencia, se encuentra que el resistor produce una potencia de ruido disponible igual a ∆ Watts.
1.4.3.- Interferencias
Resultan de la presencia de señales en bandas de frecuencias muy próximas a la frecuencia a la que se está operando, ocasionando una variación o en el peor de los casos destrucción de la señal que está siendo transmitida. Las interferencias son muy importantes en los medios no guiados aunque también se deben considerar como un problema en los medios guiados porque en estos las emisiones en cables muy cercanos pueden ocasionar interferencia entre ellos.
1.4.4.- Relación señal a ruido (SNR)
El ruido presente en los sistemas de comunicaciones puede alterar uno o más bits. Si la velocidad de transmisión es aumentada, el tiempo de bit se hace más corto, de forma tal que el ruido presente afectará a un mayor número de bits. Por lo tanto se dice que a mayor velocidad de transmisión, mayor es la tasa de error. Se considera que si se aumenta la energía de la señal, dado un específico nivel de ruido, se podrá mejorar la recepción de los datos. El parámetro para el desarrollo de esta idea es la relación señal a ruido, que se define como el cociente de la potencia promedio de la señal entre la potencia promedio del ruido presente en el medio de transmisión. Este cociente es importante en el receptor, pues es ahí donde se realizan los procesos para la eliminación del ruido. Debido a la facilidad matemática la relación señal a ruido (SNR) se expresa en dB (decibeles). Así, como se ve en la ecuación (1.7).
1 0
1 0
lo g
P R O M E D I O s e ñ a ld B
P R O M E D I O r u id o
P o te n c ia
S N R
P o te n c ia
(1.7)
17
1.4.5.- Relación señal interferencia (SIR)
La relación de fuente a interferencias (SIR), es un parámetro que determina la capacidad que tiene una fuente de exceder el nivel de interferencia, determinado por la ecuación (1.8).
2
2 1 0
1 0
i n t
lo g
d B
d e f
e r f
S S N R
e
(1.8)
Donde:
≡ Fuente definida
≡ Interferencia de las fuentes no deseadas
1.4.6.- Relación señal a ruido-interferencia (SNIR)
En una red con n transmisores/receptores para comunicación inalámbrica, Txi se supone debe transmitir a Rxi, debido a la interferencia, la señal de otros transmisores también está presente junto con el ruido respectivo. Para medir esto, se analiza con una señal SINR (Signal to Interference plus Noise Ratio) en cada receptor, por lo tanto la SINR es una función, como se puede observar en la ecuación (1.9), de potencia.
1, ...
i
i i
i
i n
S
I
(1.9)
18
1.4.7.- Tasa de bit erróneo (BER)
La tasa de bit erróneo (BER, por sus siglas en ingles), es la relación que existe entre la cantidad de bits detectados de manera errónea en el receptor con la cantidad de bits totales enviados. Es decir, es la probabilidad de recibir un bit erróneo.
1.4.8.- Tasa de error de Símbolo (SER)
19
CAPÍTULO 2. MODULACIÓN DIGITAL Y
20
Introducción
El objetivo fundamental en telecomunicaciones es enviar información desde un trasmisor hasta un receptor a través de un canal. Desgraciadamente, por la existencia inherente del ruido en el canal de comunicación, el mensaje (información) es corrompido y como consecuencia al llegar al receptor existen diferencias considerables entre las secuencias de datos que son enviadas y las que son recibidas. Para erradicar este problema, se realiza la codificación de canal, en términos generales consiste en introducir redundancia al mensaje para que sea posible recuperar la información original de la forma más fiable posible.
En el teorema de capacidad de canal Shannon define la máxima tasa de información mutua entre transmisor y receptor dado por la ecuación (2.1), la capacidad de canal considera el ruido presente en el canal permitiendo un cálculo más aproximado de esta tasa de información en un sistema de comunicación real.
= log + ⁄ / (2.1)
Donde:
W ≡ A ho de a da.
S ≡ Pote ia p o edio de la señal transmitida.
N ≡ Pote ia p o edio del uido.
Esta máxima tasa transferencia de información es posible si se incrementa la longitud de código, es decir que a través de un incremento en la confiabilidad la tasa de error recibida es cercana a cero mientras no se tenga una tasa de transmisión mayor a la capacidad del canal de modo que para cualquier nivel de SNR que no sea nulo existe una tasa de transferencia en la que se establece una comunicación confiable. A esto se le conoce como teorema de codificación de canal, asegurando también que con poca energía de la señal transmitida se tiene una probabilidad de error mínima.
El desempeño de un sistema de comunicación codificado esta referenciado por el límite Shannon, dada la ecuación (2.2)se obtiene la ecuación (2.3).
=�� �
� (2.2)
21
� ≡ E e gía de it.
≡ De sidad espe t al de pote ia p o edio del uido.
≡ Tasa de t a s isió de los símbolos.
Despejando de la ecuación (2.2) �� el límite de Shannon esta expresado por la ecuación (2.3).
�� = �
� (2.3)
Figura 9. Diagrama de eficiencia del ancho de banda de un sistema ideal.
En la Figura 9 se puede observar la eficiencia del ancho de banda de un sistema ideal en donde la tasa de transmisión de los símbolos es igual a la capacidad de canal C para el cual es indicado con el límite de Shannon, donde se puede observar para este limite el valor es de -1.54 dB.
22 respectivamente en donde la decodificación dura se establece cuando el demodulador entrega al decodificador de canal la información tal y como es recibida sin efectuar corrección, de modo que el decodificador tiene que efectuar una operación para corregir los errores y el mensaje pueda ser recuperado con la mayor confiabilidad posible. En la decodificación suave el demodulador detecta el error y hace una estimación del símbolo más probable, para después ser intervenido por un decodificador de canal.
2.1- Modelos de canal
2.1.1- Canal binario simétrico
Co sta de u a a al de e t ada u a al de salida, do de solo se puede t a s iti u i a io. Es el ue o al e te se usa pa a si plifi a el estudio del a al de u sistema de comunicaciones digitales (véase Figura 10).
Con la let a p , se ep ese ta la p o a ilidad de ue ua do es e iado u it o estado o , se e i a u o espe ti a e te, ie t as ue ep ese ta la p o a ilidad de ue u it llegue de fo a i o e ta, esto es, ue u estado llegue al e epto o o u estado por ejemplo. Como los valores de probabilidad va de 0 a 1, se tiene que:
q=1-p
Figura 10. Canal Simétrico Binario.
23
( 0 1) (1 0 ) 1 (1 1) ( 0 0 )
P P p
P P p
(2.4)
La ecuación (2.4) expresa la probabilidad de transición del canal. Esto es, dado que un símbolo fue transmitido, la probabilidad de que este llegue correctamente es p y la probabilidad de que llegue erróneo es q (relacionado con la energía del símbolo). El decodificador actua tomando decisiones duras o suaves, que dependen de los elementos dis etos o , au ue el e pleo de de isio es du as i pli a u a pe dida i e e si le en la información.
El empleo de decisiones duras en el decodificar hace fácil de realizar las decodificaciones apoyándose de la estructura algebraica incorporada en el diseño del canal, mientras que las decisiones suaves utilizan un cuantizador multinivel a la salida del demodulador. La representación de los niveles del cuantizador, depende del nivel de la señal y de la varianza del ruido, aunque la desventaja de las decisiones suaves complica la puesta del decodificador.
De forma natural cada vez que el transmisor envía datos, el receptor recibe una señal diferente a la que originalmente fue enviada, esto es provocado por la atenuación, distorsión y el ruido.
2.1.2.- Canal AWGN continuo en tiempo
Es útil para modelar sistemas de comunicación el cual consiste en agregar ruido AWGN al canal por medio de una serie de números que como su nombre lo indica representan una función gaussiana y que a su vez son acorde a la energía de símbolo de la información que se desea transmitir. Visto desde el diagrama a bloques del canal de comunicación después de que a los bits de información se les agrega redundancia justo en el codificador de canal se considera la energía de símbolo, seguido por el modulador la señal es enviada por medio del canal de comunicación en este caso AWGN, en la ecuación (2.5) se muestra la salida resultante considerando únicamente el ruido AWGN
( ) ( ) ( )
r t s t n t (2.5)
Donde:
24 n(t)≡ I di a el uido la o gaussiano con una densidad espectral de potencia de ruido de
⁄ y media cero.
2.1.3.- Canal AWGN discreto en tiempo
Considerando un canal AWGN donde las entradas son valores discretos de la señal pero entrega una señal de salida continúa en tiempo. Este canal puede ser obtenido a partir de un canal continuo en tiempo AWGN considerando el modulador en el transmisor y un filtro demoludador en el receptor. La relación señal a ruido a la salida del filtro estará dado por la ecuación (2.6).
=� � =
� (2.6)
Donde � es la varianza de la señal y � es la varianza del ruido, y � es la energía de símbolo. En general, estamos interesados en la transmisión de bits. En la ecuación (2.6) , la relación señal a ruido (SNR) es independiente del ancho de banda del canal. Este resultado es válido sí y solo sí la señal está limitada en banda y puede pasar a través del canal sin sufrir distorsión. Un ejemplo grafico de este tipo de canal se muestra en la Figura 11, donde se observa que para los distintos niveles de amplitud (valores de 1 y de 0 correspondientes al código binario) se tiene un nivel de ruido agregado a la señal.
25
2.2.- Modulación digital
El proceso de modulación generalmente traslada el espectro de la señal a un nuevo rango de frecuencias que resulte más conveniente para la transmisión.
Una forma fácil de trasladar el espectro de una señal banda base, m(t), a una frecuencia más alta es multiplicar la señal banda base por una onda portadora, Xc(t)=cos(2πfct). La onda resultante y(t), es denominada señal modulada de doble banda lateral, ecuación (2.7).
= ∗ cos � (2.7)
El espectro de frecuencia de m(f) es desplazado a la frecuencia de la portadora, tal y como se muestra en la ecuación (2.8).
= [ − + + ] (2.8)
La magnitud del espectro |M(f)| de la señal banda base m(t), con un ancho de banda fm, y
la magnitud del espectro |Xc(f)| de la señal de doble banda lateral Xc(t) con un ancho de banda WDSB se muestra en la Figura 13 y Figura 14, respectivamente.
En la Figura 14, las componentes del espectro que aparecen en el rango de fc a (fc+fm) se
denomina banda lateral superior. Mientras que las componentes del espectro que aparecen en el rango de (fc-fm) a fc se denomina banda lateral inferior. Generalmente, la frecuencia
de la portadora es mucho más alta que la frecuencia de la señal banda base.
26
f 0
|X(f)|
-fm fm
Banda base Ancho de banda
Figura 12. Espectro de la magnitud de una señal banda base.
f -fc
|Y(f)|
-fc-fm
Doble banda lateral
fc
-fc+fm 0
USB LSB
LSB USB
fc-fm fc+fm
Figura 13.Espectro de la magnitud de una señal modulada de doble banda lateral.
La modulación pasa-banda, además de la reducción significativa del tamaño de la antena, tiene otros beneficios. Si más de una señal es transmitida en un solo canal, la modulación es usada para separar las diferentes señales, esta técnica se le conoce como multiplexaje por división de frecuencia, FDM. La modulación también se usa para minimizar los efectos de interferencia y para trasladar una señal a una banda de frecuencia de acuerdo a los requerimientos del sistema, en este caso las señales de RF son convertidas a una frecuencia intermedia (IF) en el receptor.
27 De este modo la modulación pasa-banda se define como el proceso donde la amplitud, frecuencia o fase de la portadora son variadas de acuerdo con la información a transmitir. La forma general de la onda portadora está dado por laecuación (2.9):
= cos[� + � ] (2.9)
Donde:
A(t) ≡ Amplitud.
� ≡ Frecuencia angular de la portadora.
� ≡ Fase.
Cuando el receptor conoce la fase de la portadora para demodular a las señales, el proceso se denomina detección coherente. En cambio, cuando el receptor no utiliza la fase como referencia, el proceso es denominado detección no coherente. En una detección coherente ideal, el receptor tiene a su disponibilidad prototipos de cada una de las posibles señales a recibir. Estos prototipos intentan duplicar la señal transmitida en cada aspecto, incluso en la fase de RF, el problema de la detección coherente es que las portadoras del transmisor y receptor deben estar sincronizadas en tiempo y fase. Algunos esquemas de modulación que utilizan detección coherente son: PSK, FSK, ASK e híbrida. Una forma especial de la modulación híbrida es la modulación en amplitud y cuadratura (M-aria QAM).
La detección no coherente consiste en emplear demoduladores que están diseñados para operar sin conocer la fase de la portadora, de este modo la estimación de la fase no es necesaria. La ventaja que presentan los sistemas no coherentes respecto a los coherentes es que reducen la complejidad, sin embargo tienen el inconveniente de que la probabilidad de error incrementa. Algunos esquemas de modulación que utilizan detección no coherente son: DPSK, ASK, FSK.
Una onda portadora sinusoide puede ser representada en su forma compleja, por el teorema de Euler:
� = � + � (2.10)
En la ecuación (2.10), � , contiene los dos componentes importantes de cualquier portadora sinusoidal, denominados en fase (parte real) y cuadratura (parte imaginaria) los cuales son ortogonales. Entonces, la onda portadora sin modular puede ser representada como un vector el cual va rotando a una frecuencia de � en el transcurso del tiempo. En la Figura 15 se ejemplifica de t0 a t1. Cuando la portadora se modula con la información, se
puede ver la modulación como una perturbación de la rotación del vector.
En un esquema de modulación M-aria, es posible representar M señales ,
, … , . El cual se determina como = , donde cada símbolo tiene un tiempo
28
= (2.11)
Donde:
n≡ número de bits por símbolo.
Tb≡ Duración de bit.
Imaginario (Cuadratura, Q)
Real (Fase, I)
exp(j
ω
0t
1)
ω
0exp(j
ω
0t
2)
Figura 14. Rotación de un vector de t2 a t1.
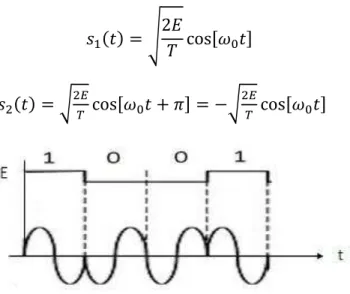
2.2.1.- Phase Shift Keying (PSK)
Este esquema de modulación es ampliamente usado en sistemas de comunicación militar y de uso comercial. La expresión analítica general está definida en la ecuación (2.12).
= √ �cos[� + � ] ≤ ≤ = , … , (2.12)
Donde la fase � tendrá M valores discretos, determinados por la ecuación (2.13)
� = � = , … , (2.13)
29
= √ �cos[� ]
= √ �cos[� + �] = −√ �cos[� ] (2.14)
Figura 15. Ejemplo de PSK
Un par de ondas sinusoidales que difieren 180° en fase, recibe el nombre de señales antipodales. En el caso de BPSK, sólo hay una función básica de energía unitaria, la cual se muestra en la ecuación (2.15).
� = √ cos[� ] ≤ ≤ (2.15)
Por lo que se puede expresar las señales transmitidas en términos de � como lo muestra la ecuación (2.16)
= √��
= −√�� (2.16)
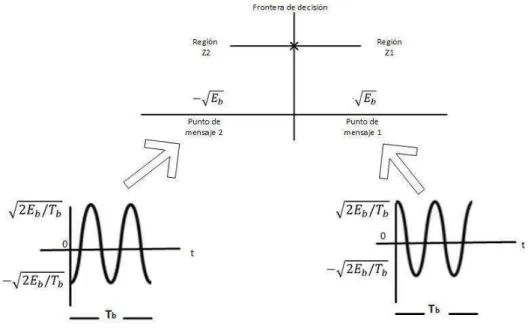
Un esquema de modulación BPSK se caracteriza por tener un espacio de señal unidimensional (N=1), con una constelación consistente en dos símbolos (M=2). Donde las coordenadas de los símbolos (en este caso 0 y 1) están determinadas por la ecuación (2.17).
= ∫ � = +√�
= ∫ � = −√� (2.17)
Los puntos en la constelación, por lo tanto, se localizan en = +√� y = −√�.
Desempeño de error
Para obtener una regla de decisión a favor del símbolo 0 ó el símbolo 1, el espacio de las señales de la figura es dividido en dos regiones:
30
Conjunto de puntos más cercanos al punto de mensaje 2 en −√�
En la Figura 17 estas regiones de decisión se identifican como Z1 y Z2.
La regla de decisión consiste en determinar que símbolo fue transmitido (es decir,
� ). Se decide que se transmitió si el punto de la señal recibida cae en la región Z1, mientas que se decide que fue si el punto de la señal recibida cae en la
región Z2. Sin embargo, se pudo haber transmitido el símbolo pero el ruido es tal que
el punto de la señal recibida cae dentro de la región Z2. O bien se pudo haber transmitido
y el punto de la señal recibida cae dentro de la región Z1.
Figura 16. Regiones de decisión.
La región de decisión asociada con el símbolo está descrita por Z1: 0<x1<∞
Donde el elemento X1 se relaciona con la señal recibida por medio de la ecuación (2.18)
= ∫ � (2.18)
Donde la función de densidad de probabilidad condicional de una variable X1, debido a que
fue transmitido el símbolo 0, se establece por la ecuación (2.19).
� | =√� exp [− − ] =√� exp [− ( + √�) ] (2.19)
La probabilidad condicional de que el receptor decida de forma incorrecta, dado que fue transmitido el símbolo 0, ecuación (2.20)
= ∫∞ � | = √� ∫ exp [− ( + √�) ]∞ (2.20)
31
=√ ( + √�) (2.21)
Y haciendo un cambio de variable de integración de a z. Sustituyendo en la ecuación anterior se obtiene la ecuación (2.22)
=√�∫√�/∞ exp − = √� (2.22)
Donde ferc() es la función de error complementaria.
Se puede observar en la figura 17 que el espacio de señales es simétrico con respecto al origen. Se concluye que , la probabilidad condicional de que el receptor decida en favor del símbolo 0, dado que fue transmitido el símbolo 1, tiene el mismo valor que la ecuación anterior.
De este modo, al promediar y , se tiene que la probabilidad promedio de error para BPSK se representa con la ecuación (2.23)
= √� (2.23)
Se puede observar de la ecuación 1.20 que si la energía de símbolo aumenta, para una densidad espectral de ruido específica, la probabilidad promedio de error disminuye.
2.2.2. Frequency Shift Keying (FSK)
La ecuación (2.24) expresa la modulación FSK.
= √ �cos[� + �] ≤ ≤ = , … , (2.24)
32
Figura 17. Cambios de frecuencia por cada transmisión de símbolo.
2.2.3.- Amplitude Shift Keying (ASK)
Laecuación (2.25) expresa la modulación ASK.
= √ �� cos[� + �] ≤ ≤ = , … , (2.25)
Donde la amplitud √ �� tendrá M valores discretos, y la fase � es una constantes
arbitraria. En la figura 19, se puede ver que M=2, lo cual representa las dos formas de onda diferentes que corresponderán al símbolo 1 y el símbolo 2. En una de las señales la amplitud
es de √ � y en la otra su amplitud es de cero. En la figura 19 se puede observar un vector
correspondiente con el estado de máxima amplitud, y un punto en el origen correspondiente al estado de amplitud cero. ASK fue usada en telegrafía por radio a principios del siglo XX. Hoy en día, ASK no es comúnmente usado en los sistemas de comunicaciones digitales.
33
2.2.4-. Esquemas en cuadratura
La modulación M-aria QAM implica dos funciones pasa-banda ortogonales, como se muestra a continuación en la ecuación (2.26).
� = √ cos[ � ] ≤ ≤
� = √ sen[ � ] ≤ ≤ (2.26)
Permitiendo la transmisión de = bits en un tiempo T en el mismo ancho de banda. QAM se puede entender como una combinación de ASK y PSK.
El mensaje i-ésimo en el plano (� , � ) denotado por ( � � , � �
Donde:
≡ Distancia mínima entre cualquiera de los símbolos de la constelación.
so e te os, do de i= , ,…,M.
Considerando ( � )= √� , donde � es la energía de la señal con la amplitud más baja. La señal M-QAM que se transmite para el símbolo k, se define en la ecuación (2.27).
= √ � cos � − √ � sen � ≤ ≤ = , ± , ± , (2.27)
Se puede observar de la ecuación anterior, que la señal consta de dos portadoras en cuadratura y fase las cuales se modulan mediante un conjunto de amplitudes discretas. De acuerdo al número de símbolos M, las constelaciones se clasifican en cuadradas y cruzadas. Cuando M es par y cuando M es impar, respectivamente. En la tecnología LTE los tres esquemas de modulación usan constelaciones cuadradas: 4-QAM, 16-QAM y 64-QAM.
34
= √ (2.28)
Donde L es un entero positivo que representa el número de amplitudes. Con esto, una constelación cuadrada M-QAM se considera como el producto cartesiano de una constelación L-PAM consigo misma.
El producto cartesiano está conformado por el conjunto de todos los pares ordenados posibles de coordenadas con la primera coordenada de cada uno de ellos tomada del primer conjunto implicado en el producto y la segunda coordenada tomada del segundo conjunto en dicho producto.
Los pares ordenados de una constelación cuadrada QAM se muestran a continuación:
{ , } = [
− + , − − + , −
− + , − − + , − − , −− , −
− + , − + − + , − + − , − +
]
La probabilidad de bit erróneo para M-QAM se define en laecuación (2.29).
= − − [√ − ��] (2.29)
Donde Q(x) es la función de error complementario. Definida por la ecuación (2.30)
35
2.3.- Tipos de códigos para la corrección de errores
Existen dos técnicas para la corrección de errores:
ARQ (Automatic Repeat reQuest): El receptor solicita al emisor un reenvío del
bloque de datos cuando detecta un error.
FEC (Forward Error Correction): El receptor se encarga de corregir los errores
detectados gracias al uso de códigos autocorrectores. Por lo que no necesita de una retransmisión de los datos, siendo así muy eficaz en aplicaciones de tiempo real. Es posible corregir el mensaje corrompido en el receptor si se añade al mensaje original bits de redundancia.
Los principales códigos de codificación son: —Códigos bloque.
—Convolucionales.
2.3.1.- Códigos Bloque
Un código de bloques consiste en un conjunto de vectores de longitud fija llamados palabras código. Se dice que un código es lineal cuando es posible sumar dos palabras códigos para formar una tercer palabra código. Entonces consideremos un código de bloque lineal (n, k) donde k bits de los n bits del bloque son siempre idénticos. Los n – k bits son los bits de paridad agregados al código. Existen 2n posibles palabras código en un código binario de
longitud n. Un código de bloques sistemático es aquel donde las palabras código se dividen en 2 partes, una para representar los bits del mensaje y la parte restante serán los bits de paridad, en la Figura 23 se muestra la estructura de una palabra de código sistemática
b0, b1, b2, … , n-k-1 m0, m1, … , k-1
Para tener mejor profundizado esto, definimos el vector de información m como 1 por k, el
vector de paridad b como 1 por (n – k), y el vector de código c a 1 por n, de los cuales se obtienen las ecuaciones(2.33),(2.34),(2.35).
Bits de paridad Bits de mensaje
36
0 1 k 1
m m , m , , m (2.33)
0 1 2 n k 1
b b , b , b , , b (2.34)
0 1 n 1
c c , c , , c (2.35)
Definimos a la matriz P como la matriz de coeficientes de k por (n – k), que determinan los (n – k) bits de paridad para posteriormente poder definir la matriz generatriz que nos ayudara a codificar nuestro mensaje
=
[
p , p , … , p , − −
p , p , … , p , − −
p , p , … , p , − −
⁞ ⁞ ⁞
p − , , p − , , … , p − , − − ]
Donde p toma valores de 0 o 1.
La matriz identidad de k por k será nuestra segunda parte de nuestra matriz generatriz sistemática.
=
[
, , , … , , , , … , , , , … , ⁞ ⁞ ⁞ ⁞
, , … , ]
Para generalizar nuestra matriz generatriz sistemática, tenemos:
= [ ⁞ ]
Nótese que la matriz generatriz de forma sistemática genera un código de bloques lineal donde los primeros k bits de cada palabra código son idénticos a los bits de información transmitidos.
Una vez conociendo la matriz generatriz procede a multiplicar nuestros bits de mensaje m
por nuestra matriz generatriz G para generar nuestra palabra código y así poder enviarla mediante el canal de transmisión, donde debido a diversos factores de ruido los bits de cada palabra código se verán corrompidos, siendo la operación que resultara el vector código como se muestra en la ecuación (2.36).
c m G (2.36)
37
r c e (2.37)
Donde r es igual a la suma del vector código o palabra código transmitida más un vector de bits erróneos e o también llamado patrón de error debidos a las características del canal. El receptor es el encargado de recibir este vector r para después decodificarlo y recuperar el vector código c, esto se logra mediante un proceso inverso a la matriz generatriz. La
matriz de recuperación HT o también llamada matriz de verificación de paridad, denotado
por la ecuación (2.38).
:
[ n k T]
H I P (2.38)
Donde es la transpuesta de la matriz de bits de paridad.
Al realizar la operación de multiplicación de la matriz de verificación de paridad H por la
matriz generatriz transpuesta, tendremos una matriz nula donde todos los valores de la matriz corresponderán a un 0, por lo tanto
=
El vector del síndrome del error o llamado únicamente síndrome, nos ayudara a obtener el patrón de errores e mediante la multiplicación de nuestro vector recibido r por la transpuesta de nuestra matriz de paridad HT, esto se expresa con la ecuación (2.39)
T
s r H (2.39)
Donde s es denotado como el síndrome.
Para lo cual sustituimos la ecuación (2.38) en la ecuación (2.39) para obtener:
= +
= +
=
Donde = 0 debido a que el receptor debe tomar el patrón de errores con menor peso o mejor dicho con menor cantidad de bits erróneos (vector con menor cantidad de 1´s), que corresponde únicamente a s = eHT.
Para la decodificación por síndrome se deben cumplir estos 4 pasos:
1. Calcular el síndrome s.
2. Encontrar el patrón de error más probable que satisface eHT=s
3. Estimar la palabra código, ĉ = r – e
38
2.3.2.- Códigos Cíclicos
Es un código muy habitual y de fácil implementación que se usa para la detección de errores. Su principal funcionamiento es agregar bits de paridad a los bits de información a partir de una división entre un polinomio predeterminado, formando así una trama que será transmitida. En el receptor, la trama recibida será dividida entre el mismo polinomio que se usó en el transmisor, si el residuo es igual a cero se determina que no hubo errores.
Si consideramos como:
T: trama de tamaño de n bits.
M: mensaje con k bits de información.
FCS: bits de paridad, (n-k), de tamaño L.
P: El polinomio divisor.
A modo de ejemplo, para simplificar la explicación. Se supone que el número total de bits de la trama es de n=8. Mientras que el mensaje tiene un tamaño de k=6 con la siguiente información:
M=110110
L=8-6=2
Como aún no se conoce los valores de los bits redundantes, se agregan L ceros al mensaje. De este modo:
M=11011000
39 El residuo indica los valores de L bits de paridad, por lo que serán agregados en el mensaje M, para conformar así la Trama de bits que serán transmitidos. Por lo tanto T=11011001.
En el decodificador, la trama de bits T recibida es dividida por el mismo polinomio usado en el codificador, en este ejemplo se considera que la trama fue recibida sin ser corrompida. Entonces:
Podemos observar que el residuo es igual a cero, por lo que se llega a la conclusión que no ocurrió ningún error en la transmisión.
Algunos polinomios generadores más comunes se muestran en la Tabla 2.