Diseño e Implementación del Módulo para Adquisición de Imágenes en el Espectro Visible para el Proyecto Cubesat UD Colombia II
142
0
0
Texto completo
(2) DISEÑO E IMPLEMENTACION DEL MÓDULO PARA ADQUISICIÓN DE IMÁGENES EN EL ESPECTRO VISIBLE PARA EL PROYECTO CUBESAT-UD COLOMBIA II. DANILO ANDRES GARCIA HANSEN. Trabajo de grado para optar por el título de Magíster en Ciencias de la Información y las Comunicaciones Director: Ing. Leonardo Plazas Nossa, MSc. Grupo de Investigación GITEM. UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE INGENIERÍA MAESTRÍA EN CIENCIAS DE LA INFORMACIÓN Y LAS COMUNICACIONES BOGOTÁ D.C. 2016 2.
(3) Nota de aceptación. ________________________. ________________________. ________________________. ________________________ Presidente del Jurado. ________________________ Jurado. ________________________ Jurado. 3.
(4) AGRADECIMIENTOS A Dios y a mi familia, porque una vez más me han demostrado que todo está dado. A Darío A. Segura T., por ser un gran compañero y amigo que me motivó y ayudó en todos los momentos de este proyecto. A Rubén Javier Medina: profesor, coordinador y amigo.. 4.
(5) TABLA DE CONTENIDO RESUMEN.................................................................................................................................. 12 INTRODUCCION ........................................................................................................................ 12 1. GENERALIDADES DEL TRABAJO DE GRADO ...................................................................... 13 1.1. Formulación del problema ....................................................................................... 13. 1.2. Hipótesis ................................................................................................................... 14. 1.3. Justificación .............................................................................................................. 14. 1.4. Objetivos ................................................................................................................... 15. 1.4.1. Objetivo General ............................................................................................... 15. 1.4.2. Objetivos específicos ........................................................................................ 15. 1.5 2. Alcance y limitaciones .............................................................................................. 15. MARCO TEORICO Y REQUERIMIENTOS............................................................................. 16 2.1. Proyecto Pico satélite CubeSat ................................................................................. 16. 2.1.1. Los Pioneros ...................................................................................................... 16. 2.1.2. Que es el proyecto CubeSat.............................................................................. 17. 2.1.3. Como es un CubeSat ......................................................................................... 18. 2.1.4. Lanzamientos relevantes de proyectos CubeSat .............................................. 21. 2.1.5. Presente del CubeSat (NASA, s.f.)..................................................................... 23. 2.2. ¿Por qué espectro visible? ........................................................................................ 24. 2.2.1. Espectro electromagnético: .............................................................................. 25. 2.2.2. Lo que se puede obtener del espectro visible .................................................. 25. 2.2.3. Usos de las imágenes en espectro visible ......................................................... 28. 2.2.4 ¿Es posible trabajar con solo una banda del espectro visible? (Azul, Roja o Verde). 29 2.3. 3. Caracterización de la imagen .................................................................................... 30. 2.3.1. Resolución Espectral (RE) .................................................................................. 30. 2.3.2. Resolución Espacial (RE) .................................................................................... 31. 2.3.3. Resolución Temporal (RT) ................................................................................. 31. 2.3.4. Resolución Radiométrica (RR) ........................................................................... 32. 2.3.5. Tamaño De La Imagen ...................................................................................... 32. ANALISIS DEL SISTEMA Y GENERACION DEL MODELO ..................................................... 32 3.1. Modelo general del sistema ..................................................................................... 32. 5.
(6) 3.2 Modelo general del CubeSat UD – Colombia II: Módulo de captura de imágenes y componentes relacionados con los que se interactúa directamente .................................. 34 3.3. Modelo general del módulo de captura de imágenes en espectro visible .............. 36. 3.4. Realización del modelo del módulo de captura ....................................................... 37. 3.5 Interfaces necesarias para la interacción del módulo de captura con el resto del sistema .................................................................................................................................. 39 3.6. Formación de la imagen: .......................................................................................... 39. 3.6.1. Área de cobertura de la imagen ....................................................................... 40. 3.6.2. Área por pixel (de la imagen)............................................................................ 41. 3.6.3. Defectos en las imágenes: ................................................................................ 42. 3.7. Sensor ....................................................................................................................... 43. 3.7.1 3.8. Tipos de sensor ................................................................................................. 43. Elección del sensor ................................................................................................... 44. 3.8.1. Modo de conexión y formas de operación de la cámara RaspBerry Pi ............ 47. 3.8.2. Potencia ............................................................................................................ 48. 3.8.3. Sensibilidad ....................................................................................................... 48. 3.8.4. Tamaño Pixel..................................................................................................... 48. 3.8.5. Diagrama funcional de bloques ........................................................................ 48. 3.9. Almacenamiento de la imagen ................................................................................. 49. 3.10. Transmisión de la imagen ........................................................................................ 51. 3.10.1. Tiempo de vista................................................................................................. 51. 3.10.2. Cantidad de datos a transmitir ......................................................................... 51. 3.10.3 2013). Número de enlaces necesarios para transmitir una imagen (Segura Torres, 52. 3.10.4. Dispositivo de almacenamiento en el CUBESAT ............................................... 53. 3.11. Módulo de procesamiento RaspBerry Pi .................................................................. 54. 3.11.1. Características................................................................................................... 55. 3.11.2. Sistemas embebidos ......................................................................................... 58. 3.11.3. Almacenamiento............................................................................................... 58. 3.12. Lenguajes de programación en la RaspBerry ........................................................... 58. 3.12.1. Compilación en lenguaje C de manera “Sistema Remoto” .............................. 58. 3.12.2. Lenguaje C en IDE Geany .................................................................................. 59. 3.12.3. Python Lenguaje de programación interpretado ............................................. 60. 6.
(7) 3.13. 4. ¿Cómo se cumplen los requerimientos de tierra en el CUBESAT? ........................... 61. 3.13.1. Base de datos para imágenes (estación terrena) ............................................. 62. 3.13.2. Base de datos relacional ................................................................................... 62. 3.13.3. Sistema de archivos .......................................................................................... 63. 3.13.4. FTP .................................................................................................................... 65. 3.13.5. Servicios WEB ................................................................................................... 65. VALIDACIÓN DE RESULTADOS .......................................................................................... 65 4.1. Modelo se emulación utilizado................................................................................. 66. 4.2. Como extraer información de la imagen (Algoritmos) ............................................. 67. 4.2.1 4.3. Corrección de la perspectiva ............................................................................ 67. Algoritmo de reordenamiento en imagen RGB ........................................................ 70. 4.3.1. División de la imagen ........................................................................................ 70. 4.3.2. Orden de la información ................................................................................... 72. 4.3.3. Ejemplo de segmentación y recuperación de imagen en el espectro visible (RGB) 76. 4.4 Análisis y validación de las tramas propuestas en (Segura Torres, 2013) para el espectro visible ..................................................................................................................... 80 4.4.1. Los campos PAR y CHECK .................................................................................. 81. 4.4.2. Experimento de validación de comunicaciones: .............................................. 83. 4.5. Experimento para caracterizar el lente y sensor de la cámara utilizada .................. 86. 4.5.1 4.6. Características de la imagen capturada (Distancia corta) ................................ 86. Envió de las imágenes a la tierra .............................................................................. 90. 4.6.1. Módulo de comunicaciones.............................................................................. 90. 4.6.2. Emulación del modelo (Módulos de comunicaciones RF) ................................ 91. 4.6.3. Implementación en el modelo “emulado” ....................................................... 93. 4.6.4. SOFTWARE PC ESTACION TERRENA .................................................................. 96. 4.7. Extracción de Información de la imagen usando el software ERDAS ....................... 96. 4.7.1. Procedimiento: ................................................................................................. 98. 4.7.2 Conclusión y análisis de resultados de la comparación de las imágenes originales y simuladas para el proyecto .......................................................................................... 110 5. CONCLUSIONES FINALES y APORTES .............................................................................. 116 5.1. Conclusiones ........................................................................................................... 116. 5.2. Aportes ................................................................................................................... 119. 7.
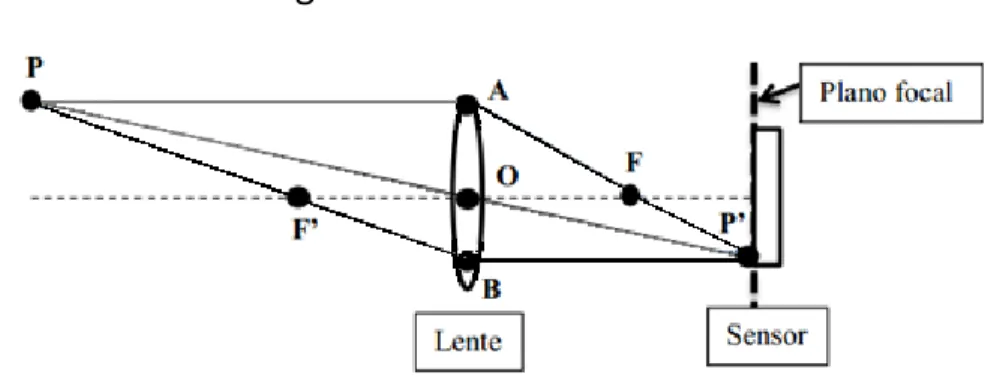
(8) 6. ANEXOS ........................................................................................................................... 120 6.1. Listado de software utilizado.................................................................................. 120. 6.2 Listado del programa (Firmware) contenido en la RaspBerry Pi 1 (B) descrito en Python 2.7. .......................................................................................................................... 121 6.3. Programas en el PC (Estación terrena) ................................................................... 126. 6.3.1. Principales funciones Estación terrena: Main() y ActualizaBD() ..................... 126. 6.3.2. Archivo principal C# de la aplicación WEB:..................................................... 131. Bibliografía .............................................................................................................................. 140. TABLA DE FIGURAS Figura 1 Concepto del Satélite SAPPHIRE 1994 [2] ................................................................... 16 Figura 2 Formas básicas del CubeSat (LEE, 2006) ..................................................................... 18 Figura 3 CubeSat forma 1U (CubeSat Kit, s.f.) .......................................................................... 19 Figura 4 Dibujo isométrico del CubeSat ................................................................................... 19 Figura 5 Dispositivo P-POD [1] .................................................................................................. 21 Figura 6 Detalle del interior del P-POD – Se observa el resorte. .............................................. 21 Figura 7 Micro Espectrómetro a bordo del Yamsat .................................................................. 23 Figura 8 Lanzamientos de proyectos CubeSat desde 2003 hasta 2015. (Autor) ...................... 24 Figura 9 Espectro electromagnético, énfasis en el espectro visible. (Tomado de: http://www.skepticalartist.com/wp-content/uploads/2013/06/Visible-spectrum.jpg) ......... 25 Figura 10 Efecto de las diferencias de iluminación a diferentes horas del día. A la izquierda 9:00AM, en el centro 12:00M y a la derecha 3:00PM. ............................................................. 27 Figura 11 Modelo general del sistema (Autor) ......................................................................... 33 Figura 12 Modelo de los componentes relacionados al sistema de captura de imágenes para el CubeSat – UD Colombia II (Autor) ............................................................................................ 35 Figura 13 Modelo del módulo de captura de imágenes en el espectro visible (Autor) ........... 37 Figura 14 Realización del modelo del sistema de captura de imágenes (Autor) ..................... 38 Figura 15 Modelo para el cálculo de la formación de la imagen, tomado de: (Segura Torres, 2013) Pág. 47 ............................................................................................................................ 39 Figura 16 Modelo para el cálculo de la imagen obtenida en el sensor (Autor)........................ 40 Figura 17 RaspBerry Pi Cámara. Versión 1.3 ............................................................................ 44 Figura 18 Diagrama funcional de bloques sensor CMOS OV5647 ............................................ 49 Figura 19 Sistema RaspBerry Pi 1 modelo B ............................................................................. 55 Figura 20 Principales componentes de la RaspBerry Pi modelo B. (Tomado de: www.raspberypi.org) ................................................................................................................ 56 Figura 21 Inclusión de parámetros en las opciones de compilación ........................................ 59 Figura 22 Entorno de desarrollo (IDE) Geany ........................................................................... 60. 8.
(9) Figura 23 Entorno de desarrollo (IDE) para Python denominado IDLE .................................... 61 Figura 24 Diagrama de la relación de la base de datos. ........................................................... 62 Figura 25 Estructura del sistema de archivos ........................................................................... 64 Figura 26 Modelo de simulación para los elementos del Pico Satélite (Autor) ....................... 66 Figura 27 Modelo para la corrección de la perspectiva tomado de (Segura Torres, 2013) ..... 67 Figura 28 Algoritmo para corrección de perspectiva ............................................................... 68 Figura 29 Función que separa la imagen RGB en sus tres bandas ........................................... 68 Figura 30 Programa de corrección de perspectiva en 3 bandas RGB. ...................................... 69 Figura 31 En la parte superior se observan las bandas separadas R, G y B y en la parte superior cada banda con la corrección de perspectiva hecha. ............................................................... 70 Figura 32 A) Imagen RGB original a corregir, B) Imagen RGB corregida .................................. 70 Figura 33 División de la imagen en 9 ventanas ........................................................................ 71 Figura 34 Imagen dividida y con cada pixel enumerado, parte superior de manera matricial, parte inferior de manera vectorial ........................................................................................... 72 Figura 35 Pixeles y su posición relativa en la ventana .............................................................. 73 Figura 36. Ejemplos en los que se ubican los pixeles y su posición relativa en la matriz para obtener la posición vectorial .................................................................................................... 73 Figura 37 Imagen con la mitad de los pixeles recibidos, se consideran en color amarillo los pixeles recibidos ....................................................................................................................... 74 Figura 38 Proceso de muestreo y comunicación de los pixeles de acuerdo a la segmentacion propuesta.................................................................................................................................. 74 Figura 39 Enumeración del muestreo clasificado por ventanas............................................... 75 Figura 40 Enumeración del orden de muestreo de los pixeles en la imagen completa ........... 76 Figura 41 División de la imagen multiespectral en 3 imágenes R, G y B .................................. 77 Figura 42 Imagen de prueba de 2499 pixeles de ancho por 1911 pixeles de alto ................... 78 Figura 43 Ideograma de la transmisión de la imagen en las tramas AX.25 .............................. 80 Figura 44 Campos de la información de la trama AX.25 .......................................................... 81 Figura 45 Campo TSTMP ........................................................................................................... 81 Figura 46 Campos de la información de la trama AX.25 y la longitud de cada uno. ................ 81 Figura 47 Distribución de la información en el campo INFO cuando la trama es de los metadatos de la imagen que se transmite ................................................................................................. 82 Figura 48 Montaje realizado para determinar características de la cámara utilizada. ............ 87 Figura 49 Mediciones con el sensor elegido (Distancia en cm vs número de pixeles en 0,5 cm) .................................................................................................................................................. 88 Figura 50 Capas del modelo de referencia OSI ......................................................................... 91 Figura 51 Módulos trans-receptores a 433MHz para emulación de comunicaciones ............. 92 Figura 52 Acople de niveles entre el módulo de comunicaciones y el RaspBerry ................... 93 Figura 53 Algoritmo general Cubesat Módulo de captura y envío de imágenes ..................... 94 Figura 54 Algoritmo de envío de archivos desde el punto de vista del CubeSat ..................... 95 Figura 55 Logo del software erdas............................................................................................ 96 Figura 56 Ventana para ordenar capas de una imagen ............................................................ 98 Figura 57 Imagen RGB obtenida ............................................................................................... 99 Figura 58 Menú para visualizar las propiedades de una imagen ............................................. 99 Figura 59 Ventana de Información de la imagen.................................................................... 100 9.
(10) Figura 60 Menú para re proyectar una imagen ...................................................................... 100 Figura 61 Ventana para re proyección ................................................................................... 101 Figura 62 Ventana de procesos .............................................................................................. 101 Figura 63 Creación de una nueva ventana de vista 2D .......................................................... 102 Figura 64 Características de la imagen cargada ..................................................................... 102 Figura 65 Creación de una nueva ventana de vista 2D .......................................................... 103 Figura 66 Imagen RGB sobre la cual se va a trabajar con el área de interés aumentada ...... 103 Figura 67 Creación de la capa área de interés AOI ................................................................. 104 Figura 68 Menú para activar el editor de Signatures ............................................................. 104 Figura 69 Ventana del editor de Signatures ........................................................................... 105 Figura 70 Selección de las herramientas de dibujo sobre la capa AOI ................................... 105 Figura 71 Selección de un poligono del area de interés ......................................................... 106 Figura 72 Apariencia final del editor de Signatures una vez se ha guardado y asociado a la imagen en edición................................................................................................................... 107 Figura 73 Menú para Clasificación Supervisada ..................................................................... 107 Figura 74 Caja de dialogo para la clasificación supervisada. .................................................. 108 Figura 75 Lista de procesos con el proceso al 100% finalizado .............................................. 108 Figura 76 Resultado de la clasificación de elementos en la imagen RGB............................... 108 Figura 77Menu de selección de Visualización de tabla de atributos de la imagen ................ 109 Figura 78 Elección de la columna que se agrega con la medida de la superficie de las texturas clasificadas .............................................................................................................................. 110 Figura 79 Tabla de resultados obtenidos de realizar una clasificación supervisada en ERDAS Imagine 2010. ......................................................................................................................... 110 Figura 80 Resultado de la clasificación de vegetación en la imagen original ......................... 111 Figura 81 Resultado de la clasificación de vegetación en la imagen simulada ...................... 111 Figura 82 Resultado de la clasificación de Nubes y agua en la imagen original ..................... 112 Figura 83 Resultado de la clasificación de Nubes y agua en la imagen simulada .................. 113 Figura 84 Resultado de la clasificación de Tierra Mar y Nubes en la imagen original............ 114 Figura 85 Resultado de la clasificación de Tierra Mar y Nubes en la imagen simulada ......... 114 Figura 86 Resultado de la clasificación de Ciudad-Vegetación y Nubes en la imagen original ................................................................................................................................................ 115 Figura 87 Resultado de la clasificación de Ciudad-Vegetación y Nubes en la imagen simulada ................................................................................................................................................ 116 Figura 88 Aspecto del montaje final de los componentes, placa base, RaspBerry Pi-Zero y cámara RaspBerryPi ................................................................................................................ 120 Figura 89 Listado de Firmware (1/5) ...................................................................................... 121 Figura 90 Listado de Firmware (2/5) ...................................................................................... 122 Figura 91 Listado de Firmware (3/5) ...................................................................................... 123 Figura 92 Listado de Firmware (4/5) ...................................................................................... 124 Figura 93 Listado de Firmware (5/5) ...................................................................................... 125. 10.
(11) TABLA DE ECUACIONES Ecuación 1 . Definición de IFOV como concepto de campo de visión instantáneo, donde d es el tamaño del terreno de cada pixel y H la altura de observación. ............................................. 31 Ecuación 2 Relación Distancia focal del lente, distancia al objeto y distancia al sensor .......... 40 Ecuación 3 Relación entre el tamaño de la imagen en el sensor y el objeto ........................... 41 Ecuación 4 Área del objeto en función del área de la imagen ................................................. 41 Ecuación 5 Resolución espacial aproximada en función de las características del sensor ...... 41 Ecuación 6 Expresión de la Resolución espacial en función de las características del pixel y de las distancias desde el lente ..................................................................................................... 41 Ecuación 7 Expresión para determinar la eficiencia del área ................................................... 41 Ecuación 8 La distancia focal es igual a la distancia del lente al sensor cuando el área del sensor es mucho menor que el área de la superficie capturada ......................................................... 42 Ecuación 9 Determinación de la resolución de una imagen..................................................... 49 Ecuación 10 Tamaño de la imagen ........................................................................................... 49 Ecuación 11 Tamaño de la imagen entregada por el sensor .................................................... 50 Ecuación 12 Tamaño de la imagen considerando la compresión............................................. 50 Ecuación 13 Cantidad de datos transmitidos en el tiempo t .................................................... 51 Ecuación 14 Tiempo de vista .................................................................................................... 51 Ecuación 15 Cantidad de datos a transmitir en el tiempo de vista .......................................... 51 Ecuación 16 Cantidad de datos a transmitir en el tiempo de vista .......................................... 52 Ecuación 17 Cantidad de datos a transmitir en varias tramas ................................................. 52 Ecuación 18 Tamaño de la imagen comprimida ....................................................................... 52 Ecuación 19 Número de tramas en un tiempo de vista ........................................................... 52 Ecuación 20 Número de enlaces para la transmisión de una imagen en función de las características de la imagen, velocidad del canal y datos útiles dentro del protocolo. ........... 52 Ecuación 21 Tiempo necesario para transmitir la imagen en términos de la información de la trama, el tamaño de la trama y de la velocidad de transmisión. ............................................. 53 Ecuación 22 Condición de equilibrio de información del sistema ............................................ 53 Ecuación 23 Relación entre el Área del objeto, la Resolución espacial y la Resolución del sensor .................................................................................................................................................. 53 Ecuación 24 Cantidad de memoria necesaria en función de las resoluciones espacial, radiométrica y espectral ........................................................................................................... 53 Ecuación 25 Memoria disponible en función de Memoria SD, Memoria del Sistema Operativo y Memoria de los programas .................................................................................................... 54 Ecuación 26 Criterio de escogencia del número de ventanas y su segmentación ................... 71 Ecuación 27 Relación entre la posición vectorial de una imagen y las coordenadas de la segmentación propuesta .......................................................................................................... 73 Ecuación 28 Cálculo del área de la superficie cubierta por el sensor a la distancia de 700 Km. .................................................................................................................................................. 89 Ecuación 29 Cálculo de la resolución espacial del sensor utilizado.......................................... 89. 11.
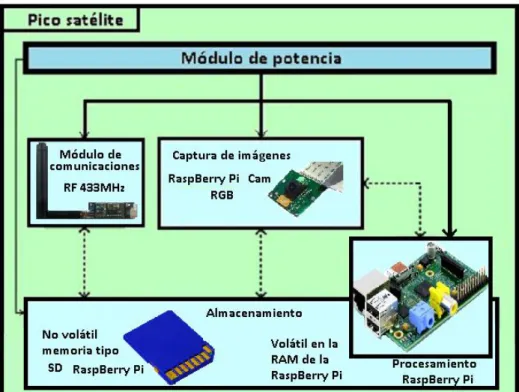
(12) RESUMEN Esta propuesta es parte integral del proyecto Cubesat–UD, el cual al ser un proyecto académico de la Universidad Distrital tiene como propósito desarrollar un pico satélite académico para circulación en órbita baja y con aplicaciones dedicadas a la adquisición de imágenes de la superficie terrestre. El proyecto que incorpora el módulo de adquisición de imágenes, en su segunda fase se denomina Cubesat-UD Colombia II. Partiendo de la plataforma desarrollada en la primera fase, en ésta segunda fase, se adiciona el módulo de adquisición de imágenes; éste a su vez se divide en dos: Adquisición de imágenes en el espectro visible y Adquisición de imágenes en el espectro infrarrojo. Una vez adquiridas las imágenes, éstas se almacenan para así descargarlas a una estación terrena; en la estación terrena se encuentra una base de datos en donde son almacenadas y clasificadas para posteriormente extraer de ellas características geo espaciales propias del tipo de imágenes que se poseen, distinguiéndolas acorde al espectro en que se encuentren. Esta propuesta es específica a imágenes en el espectro de luz visible y por ende se enfocó en la selección del sensor y los componentes adecuados para su incorporación en el diseño del módulo que interactúa entre éste sensor y los módulos de comunicaciones y de control del sistema. Para no interferir con los demás módulos existentes, se diseñó el modelo que implica desde la toma de la imagen hasta el momento en que se almacene en la estación terrena. El presente trabajo de grado parte de algunos de los enunciados expuestos por el ingeniero Darío Alejandro Segura en su trabajo denominado “MODELAMIENTO DEL SISTEMA DE ADQUISICIÓN DE IMÁGENES EN EL ESPECTRO INFRARROJO PARA EL PROYECTO CUBESAT UDCOLOMBIA II” (Segura Torres, 2013) finalizado en 2015 en la MCIC de la UD para adaptarlos al espectro visible y así comprobar la aplicabilidad que éstos tienen en el tratamiento de las imágenes pero ahora en un espectro diferente al infrarrojo.. INTRODUCCION El proyecto CubeSat, que comenzó en 1999 (CubeSat Kit, s.f.), proporciona una alternativa económica para proyectos de investigación, desarrollo y experimentación aeroespacial, presentando diferentes opciones de dispositivos estándar llamados pico-satélites. En este ámbito uno de los intereses más comunes es la adquisición de información de la superficie terrestre, para ello se cuenta con diferentes tecnologías en el área de los sensores, los cuales deben ser remotos a causa de las distancias entre el dispositivo y su objetivo, la tierra; pero estos dispositivos presentan algunas limitantes, en especial de espacio y potencia. Con cerca de 100 proyectos (INSTITUTO NACIONAL DE TECNICA AEROESPACIAL, s.f.) participando en el programa CubeSat los beneficios educativos son tremendos, los estudiantes desarrollan las habilidades necesarias a través del trabajo activo para iniciarse en la industria Aero espacial. El proyecto CubeSat provee a la comunidad con: . Un estándar físico externo con reglas de diseño claras.. 12.
(13) . Un sistema de lanzamiento estándar (P-POD) Coordinación de los documentos requeridos y las licencias de exportación. Integración y aceptación de facilidades de pruebas con horarios formales establecidos. Desplazamiento de los sistemas hacia el sitio del lanzamiento e integración con el vehículo de lanzamiento Confirmación del despliegue1 realizado y la información de la telemetría. En la Universidad Distrital el grupo GITEM se ha unido a esta iniciativa y ha trabajado en el proyecto CubeSat UD fase I y ahora se encuentra trabajando en el proyecto CubeSat UD fase II el cual incorpora como carga útil dispositivos de captura de imágenes las cuales son objeto de este trabajo de grado y en particular sobre la adquisición y almacenamiento de imágenes en el espectro visible.. Así, el trabajo se divide en 6 partes principales: 1. Generalidades del trabajo de grado en la cual se plantea el problema, la justificación de realizar este trabajo, los objetivos a alcanzar y las limitaciones que se obtienen. 2. Marco teórico y requerimientos en donde se precisan las bases o fundamentos en las que se sustentan teorías e inclusive un poco de historia para el desarrollo del contenido. 3. El análisis del sistema y modelado sobre el cual se hace el diseño de los diferentes componentes para así obtener las relaciones que se han propuesto plasmándolas en algoritmos y las definiciones planteadas. 4. Validación de resultados, es la parte fundamental del trabajo de grado en donde se prueban -con experimentos reales y simulados- las teorías propuestas en los diseños realizados, es aquí donde se demuestra la viabilidad y forma de hacer que el sistema como un todo se lleve a cabo. 5. Conclusiones finales y aportes es parte crucial del trabajo de grado porque aquí se pudo ver basado en los resultados obtenidos que aún hay más trabajo por realizar ya sea para perfeccionar el trabajo realizado o para innovar con tecnología que mejore desempeños, autonomías, resoluciones, etc…. 1 GENERALIDADES DEL TRABAJO DE GRADO 1.1 Formulación del problema En el ámbito académico y en particular en la Universidad Distrital se ha venido trabajando en el proyecto sobre satélites denominado Cubesat-UD el cual es basado en el kit para satélites académicos de la empresa Pumpkin Inc. Entre otras características el módulo básico es de. 1. Consiste en la puesta en el espacio del pico satélite. 13.
(14) dimensiones 10x10x10 centímetros y con un peso máximo de 1 Kg; ello lo clasifica dentro del rango de un pico satélite. Así que el diseño de este modelo por ende involucra un componente importante de hardware y para cumplir con la operatividad necesaria adicionalmente un componente de “Firmware”. Se entiende por Firmware un programa o software embebido o inmerso en un microchip. Por último, se hace necesario que una vez descargadas las imágenes a la estación terrena, estas sean almacenadas, se les pueda realizar la trazabilidad necesaria y llegando a procesarlas. Se aduce así, que el problema se divide en tres partes: El diseño de la parte Hardware complementándolo con el diseño de la programación necesaria que lleve a buen término la adquisición de la imagen y el almacenamiento y procesamiento que se haga a las imágenes. Puesto que en la segunda fase del pico satélite CubeSat UD la idea es diseñar un modelo para la adquisición de imágenes de la superficie terrestre, surge la pregunta: ¿Cómo adquirir imágenes en el espectro visible para el pico satélite Cubesat – UD?. 1.2 Hipótesis Para realizar la captura de imágenes en el espectro visible se modela un sistema integrado por una cámara a color, una unidad de almacenamiento, una unidad de procesamiento y un sistema de descarga interactuando estos de manera que cumplan los requerimientos específicos en cuanto a tamaño y consumo de potencia en el Pico satélite CubeSat-UD.. 1.3 Justificación Las imágenes obtenidas en el espectro visible brindan información importante sobre características propias de recursos naturales, si estas imágenes son tomadas desde una altura espacial también brindan esta información abarcando una mayor área lo que implica que se puedan tomar decisiones de mayor influencia comparadas con una foto aérea que cubre menor área. Actualmente la adquisición de imágenes es realizada por satélites extranjeros de tecnología ajena a Colombia, convirtiéndonos una vez más en consumidores de tecnología y dependientes de otros para la adquisición de información. Para poder tomar el control de este tipo de información y avanzar tecnológicamente es necesario estar en capacidad de generarla, no solo consumirla, y para ello es necesario que un país se apropie de los conocimientos del área y así conseguir un verdadero avance tecnológico. Por lo anterior es necesario, sin despreciar la experiencia extranjera, para poder avanzar en el área de las imágenes espaciales realizar experimentos propios en los cuales se obtengan resultados de la aplicación de las teorías y conocimientos locales a través de misiones propias como CubeSat UD y para logar una misión exitosa es necesario un modelo con el cual se. 14.
(15) pueda garantizar el funcionamiento, impacto y utilidad de un sistema de captura de imágenes.. 1.4 Objetivos 1.4.1 Objetivo General Diseñar e implementar el modelo adecuado y funcional del módulo de adquisición de imágenes en el espectro visible para incorporarlo en el pico satélite Cubesat-UD Colombia II.. 1.4.2 Objetivos específicos Comprender el funcionamiento de los sensores de imágenes en el espectro de luz visible. Determinar el hardware que sirva de interfaz entre el sensor y el hardware de almacenamiento. Diseñar el firmware que realice las operaciones necesarias sobre la interfaz. Determinar el dispositivo de almacenamiento de las imágenes adquiridas. Analizar el protocolo de comunicaciones entre la interfaz y el módulo de comunicaciones existente. Determinar la base de datos para el almacenamiento de las imágenes en la estación terrena. Diseñar la aplicación de consulta y procesamiento de las imágenes almacenadas.. 1.5 Alcance y limitaciones El modelo matemático planteado relaciona: El área por pixel de la imagen obtenida de la superficie, distancia entre la superficie y el módulo de captura, potencia consumida por el módulo, el espacio de almacenamiento requerido por la imagen capturada y la velocidad de desplazamiento del pico satélite. Para el prototipo de validación del modelo del módulo se realizó el diseño electrónico en bloques, componentes y la integración de estos. Este prototipo queda diseñado para la integración con los demás módulos relacionados. Como algunos de los componentes con los que se debe interactuar no existían en el instante de la validación, se simularon por medio de programas de computadora y el hardware necesario. El almacenamiento en tierra de la imagen, para la aplicación prototipo se realizó en una base de datos relacional.. 15.
(16) 2. MARCO TEORICO Y REQUERIMIENTOS. 2.1 Proyecto Pico satélite CubeSat Los satélites artificiales se clasifican (T.R.I.O. CubeSat - Introducción (TRIY), s.f.) entre muchas otras clases por su peso y tamaño. Para que un satélite se clasifique dentro de los picosatélites debe pesar máximo 1 Kg. y no sobrepasar las medidas de 10 cm. X 10 cm x 10 cm. si es de forma cúbica (LEE, 2006). A nivel mundial el kit para pico satélite Cubesat® (CubeSat Kit, s.f.) se utiliza principalmente en instituciones educativas como Universidades por el propósito para el que fue diseñado: Investigación y educación.. 1.1.1.1 2.1.1 Los Pioneros El inicio del CubeSat ocurrió a comienzos del siglo XXI, pero de los primeros satélites de estudiantes fue el denominado SAPPHIRE en 1994, este fue desarrollado en la universidad de Stanford iniciando en el mes de abril, por ese entonces se empezó sin esperanza de ser lanzado, se esperaba que al final de su desarrollo ya hubiese una forma económica de lanzarlo. El concepto inicial se observa en la Figura 1.. Figura 1 Concepto del Satélite SAPPHIRE 1994 [2]. Inicialmente fue diseñado para un peso de 20Kg, estaba hecho de aluminio principalmente con forma hexagonal y 18 pulgadas de altura, contenía principalmente un par de experimentos de estudiantes, una cámara B&W marca Logitech y un sintetizador de voz, además unos sensores Infrarrojos del gobierno quién patrocinó el proyecto, de estos sensores es que realmente se derivó su nombre: Stanford Audio Phonic Photographic InfraRed Experiment. El proyecto se terminó de diseñar y construir en 1998 y en ese entonces se planeó para lanzarse en 2002 (Heidt, 2001). El segundo satélite de Stanford se denominó OPAL: Orbiting Automated Picosat Launcher; fue iniciado en abril de 1995, su principal objetivo era demostrar como un satélite mayor, en. 16.
(17) esta caso el OPAL (clasificado micro satélite por estar entre 10Kg y 100Kg), podía portar una serie de satélites más pequeños (pico satélites) en su interior, en 1998 se vio la primera oportunidad de lanzarlo patrocinado por DARPA en cooperación para lanzar los pico satélites del Aerospace Corporation, finalmente fue lanzado el 22 de enero de 2002 desde Vandenberg AFB CA. Fue operado inicialmente desde Stanford y una semana después pudo lanzar los picosatélites que albergaba interior, a su vez algunos de estos completaron sus misiones funcionando con baterías por varios días, otros nunca respondieron después del lanzamiento. Tan solo uno de estos picos satélites poseía como fuente de alimentación adicional algunas fotoceldas, este se denominó Stensat y fue construido por radioaficionados del área de Washington, este tampoco respondió nunca. Luego de las dos experiencias con SHAPPIRE y OPAL, fue que nació y se desarrolló la idea del CubeSat, aquí retomamos la época de principios del siglo XXI.. 2.1.2 Que es el proyecto CubeSat En el año 2000, la compañía Pumpkin Inc. asistía a estudiantes de la universidad de Stanford y de la universidad de Santa Clara en cómo utilizar el software embebido RTOS Salvo en microcontroladores destinado a misiones en micro satélites. Conforme pasó el tiempo el estándar CubeSat para pico satélites ganó aceptación, fueron persuadiendo a los grupos afines gradualmente para introducir en el mercado un kit de pico satélite el cual pudiera mejorar las posibilidades de cada misión para un lanzamiento a tiempo y una misión exitosa. Así, nació el Kit de CubeSat (CubeSat Kit, s.f.). Las principales metas del proyecto fueron: . Se debe cumplir completamente con la especificación CubeSat. Su estructura debe ser de alta resistencia a través de un cuidadoso diseño y la elección de los materiales. Debe ser fácil de programar. Por el bien de su carga, su volumen interior se debe maximizar y minimizar su masa. Se debe utilizar el menor número posible de elementos de fijación. Se debe exhibir el funcionamiento a una extremada baja potencia (<20 mW) con un solo chip RISC MCU. Debe estar constituido por módulos conectables. Los módulos deben conectarse entre sí sin necesidad de utilizar cables. Debe ser capaz de aceptar las tarjetas PC/104. Debe apoyar un transmisor-receptor inalámbrico integrado y una interfaz USB. Debe tener un circuito impreso eléctrico versátil. Debe tener excelentes atributos de protección eléctrica y térmica. Debe apoyar la escalabilidad para grandes (1.5U, 2U y 3U) y pequeños (0.5U) factores CubeSat formulario. Debe estar disponible fuera de la plataforma - a un precio asequible. Al optar por ofrecer una solución integrada de hardware y el ambiente de desarrollo de software como parte del kit, los usuarios podrían desarrollar los componentes. 17.
(18) específicos de la misión sin tener que trabajar dentro de las limitaciones de un CubeSat físico. Con el aporte de varios consejeros - entre ellos algunos del equipo de diseño original CubeSat - y después de cuatro revisiones de diseño importantes-, se entregaron los tres primeros kits de producción CubeSat a un cliente comercial por primera vez en el cuarto cuatrimestre de 2003. Como se lo propusieron originalmente, el kit CubeSat se ha convertido en un diseño muy potente y versátil que satisface las necesidades de una amplia gama de misiones pico satélite. Con un Kit CubeSat, diseñar, desarrollar y probar subsistemas modulares específicos de la misión y con el software incluido en el conjunto de Desarrollo, una vez que se complete el CubeSat en el laboratorio, sólo hay que desconectar los módulos del conjunto de Desarrollo y moverlos hacia el modelo de vuelo. A continuación, se descarga el software en el microcontrolador de vuelo, se ponen las celdas solares y la antena y ya está listo para que sea puesto en marcha!. 2.1.3 Como es un CubeSat 2.1.3.1. Forma y peso. Existen tres formas básicas a las que se les denomina 1U, 2U y 3U de acuerdo al tamaño de su cuerpo exterior. Ver la Figura 2.. Figura 2 Formas básicas del CubeSat (LEE, 2006). Estos son de base 10 cm x 10 cm, con alturas de 10 cm, 22,7 cm y 34,05 cm. Para los 1U, 2U y 3U respectivamente. Los pesos respectivos no deben exceder 1 Kg, 2 Kg y 3 Kg. Además su centro de masa debe estar dentro de los 2 cm de su centro geométrico (University, 2008). El más comúnmente usado en la mayoría de los proyectos ha sido el tipo 1U. Ver Figura 3.. 18.
(19) Figura 3 CubeSat forma 1U (CubeSat Kit, s.f.). 2.1.3.2. Requerimientos estructurales. La estructura debe ser compatible en gran porcentaje con el dispositivo de lanzamiento (PPOD) del cual se tratará en el siguiente apartado.. Figura 4 Dibujo isométrico del CubeSat. En la Figura 4 se observa la forma estandarizada a la que se ha llegado, incluyendo características muy particulares como la posición de los interruptores de despliegue, los puertos de acceso y la convención X, Y y Z utilizadas para referenciar sus lados respecto a los demás.. 2.1.3.3. Características eléctricas. Los sistemas electrónicos deben diseñarse ceñidos a ciertas reglas: La electrónica debe estar inactiva durante el lanzamiento para evitar interferencias. Si posee baterías deben estar desactivadas o descargadas. Deben poseer un interruptor de despliegue, o dos preferiblemente. Deben estar localizados en los puntos diseñados para ese propósito. Debe poseer un pin de remover antes del vuelo (RBF) para que el CubeSat sea desactivado durante el proceso de integración en el dispositivo de lanzamiento.. 19.
(20) 2.1.3.4. Requerimientos operacionales. Debe haber ciertas reglas pertinentes a la integración y operación que se acogen a obligaciones legales y a la seguridad de otros satélites. Los que posean baterías deben poderse desactivar desde un comando de Desactivación = SHUT DOWN. Las antenas deben desplegarse 15 minutos después de ser lanzados del dispositivo de lanzamiento (P-POD), de este se hablará más adelante. Elementos más grandes como paneles solares, deben desplegarse 30 minutos después, esto con el fin de evitar colisiones entre CubeSats. Los transmisores pueden entrar en bajo consumo 15 minutos después de la expulsión del dispositivo de lanzamiento (P-POD), pueden activarlos o entrar en potencia de transmisión 30 minutos después. Los operadores deben proveer las licencias de las frecuencias a utilizar.. 2.1.3.5. Requerimientos de pruebas. Para garantizar todos los requerimientos del ente que va a lanzar a este y otros Satélites se deben efectuar unas pruebas previas: . Pruebas de vibración Pruebas de horneado térmico para asegurar la salida de gases de los componentes Inspección visual y medición de las áreas críticas.. 1.1.1.2 2.1.3.6. Calificación. Se debe tener un resultado de todas las pruebas pasadas para el lanzamiento específico. A los CubeSats no puede desensamblarse ni tampoco agregársele nada luego de aprobada la inspección.. 2.1.3.7. Aceptación. Después de la entrega e integración del CubeSat, además de pruebas realizadas en estas fases, se deben realizar pruebas con el sistema integrado totalmente y acoplado al dispositivo de lanzamiento (P-POD). Adicionalmente podrían descubrirse algunas interacciones desconocidas o perjudiciales durante la prueba de aceptación, la universidad politécnica de California es la que coordina estas pruebas y las realizará sin costo adicional hasta que los requerimientos completos se cumplan (University, 2008).. 20.
(21) 2.1.3.8. Dispositivo de despliegue P-POD. Para poder realizar la expulsión de los pico satélites de la nave nodriza o que los alberga, la universidad Politécnica de California diseñó y estandarizo el dispositivo de despliegue denominado P-POD por sus siglas en inglés Poly Picosatellite Orbital Deployer[1]. Estos pueden albergar tres CubeSats 1U, unCubeSat 2U y uno 1U, o uno solo tipo 3U.. En la Figura 5 se observa la formaFigura particular del sistema para albergar los CubeSat 5 Dispositivo P-PODdiseñado [1] en la nave nodriza, internamente se posee un resorte que al abrir la tapa superior del P-POD los expulsa con la fuerza suficiente, ver la Figura 6 para detalles.. Figura 6 Detalle del interior del P-POD – Se observa el resorte.. 2.1.4 Lanzamientos relevantes de proyectos CubeSat Como se ha visto CubeSat lleva existiendo más de 10 años y a lo largo de este tiempo se ven algunas de las principales misiones y sus principales objetivos (Koritza, 2009).. 2.1.4.1. Canx-1 (Wells, 2002). Es el primer proyecto pico satélite de Canadá, fue desarrollado por estudiantes graduados para que estos aprendan sobre la tecnología espacial, hecho eminentemente para desarrollo y estudio. Está diseñado para probar algunas tecnologías en órbita (Puig-Suari, 2008), en particular se probaron cámaras CMOS a color y monocromáticas para observación de estrellas, el cielo y la tierra, se usaron los horizontes de la luna y las estrellas para realizar cálculos de. 21.
(22) posicionamiento. Además se probó un dispositivo GPS y un OBC (On Board Computer). Fue planeado para lanzarse en la primera mitad del año 2003.. 2.1.4.2. CubeSat Universidad de Tokyo (Tokyo, U.o., 2001). Fue propuesto desde el año 1998, está pensado para el estudio de la construcción de aeronaves espaciales, llevaba a bordo entre otros dispositivos una cámara, sensores de temperatura, etc. Fue lanzado por el cohete ruso “Dnepr” en nov. 2001.. 2.1.4.3. Cute del Tokyo Institute of Technology (Fujiwara, 2007). Fue desarrollado con propósitos académicos (Koritza, 2009) también, su primera versión el CUTE I, fue lanzado en junio de 2003, con este se demostró toda la planeación necesaria para desarrollar, construir y comandar el satélite, finalmente en febrero de 2007 se ha lanzado su séptima versión denominado el Cute 1.7. En esta se utilizaron dos PDAs (Iai, 2004) como sistema redundante, se utilizó un magneto de torque para control de posición y unos sensores de densidad de baja energía.. 2.1.4.4. Manejo de datos y comandos sobre un pico satélite - Misión con cámara (Fisker, 2003). Esta misión fue desarrollada en Dinamarca en el Departamento de sistemas electrónicos en la Universidad de Aalborg. La idea fue el almacenamiento, compresión y transmisión de grandes cantidades de datos provenientes de una cámara, el proyecto se inició en septiembre de 2001 con el ánimo de ser lanzado en Noviembre de 2002, desde entonces ha habido 3 lanzamientos.. 2.1.4.5. AAU Cubesat. Pertenece a la Universidad técnica Danesa de Aalborg, cuya labor en estos campos comenzó en 1999 cuando fue proyectado su primer satélite Ørested para el estudio de los campos magnéticos de la tierra. Luego desarrollaron un segundo CubeSat RØMER con el ánimo de la observación del espacio fuera del sistema solar; ambos desarrollados para experimentación académica y con el patrocinio de varias empresas locales.. 22.
(23) 2.1.4.6. Yamsat 1A, 1B & 1C (Joe, 2002). El Yamsat es el primer pico satélite en la oficina nacional del programa espacial de Taiwan, R.O.C. Fue planeado para lanzarse en el programa CubeSat en 2003.. Figura 7 Micro Espectrómetro a bordo del Yamsat. Su principal carga útil fue un Micro espectrómetro cuyo diagrama de bloques se observa en la Figura 7 El micro espectrómetro se utiliza entre otras cosas para medir la energía solar reflejada por la tierra (Albedo).. 2.1.5 Presente del CubeSat (NASA, s.f.) Durante los 5 años que van de la segunda década del siglo XXI han sido bastantes los lanzamientos que han contenido Pico-satélites CubeSat, la NASA inclusive se ha unido al programa y como parte de su programa piensa lanzar al espacio cerca de 50 Pico-satélites pertenecientes a 50 estados dentro de los EEUU. A continuación y como dato relevante se muestra en la Figura 8 relacionado por años el número de lanzamientos realizados hasta el año 2015 (Gunter Krebs, s.f.). 23.
(24) Figura 8 Lanzamientos de proyectos CubeSat desde 2003 hasta 2015. (Autor). La lista detallada y actualizada de lanzamientos pasados -e inclusive futuros lanzamientos- se puede consultar en: http://space.skyrocket.de/doc_sat/cubesat.htm (Gunter Krebs, s.f.). Es importante así, recalcar que el trabajo en este campo de la técnica espacial tiene futuro prometedor por lo cual todos los esfuerzos que se hagan en este sentido contribuyen y lo seguirán haciendo con la comunidad académica nacional e internacional.. 2.2 ¿Por qué espectro visible? Si bien es cierto que en el espectro infrarrojo se pueden detectar con bastante zonas de la superficie terrestre en las cuales existe humedad e inclusive porciones de agua como fue demostrado en (Segura Torres, 2013), se hace necesario el análisis de imágenes terrestres en el espectro visible las cuales se presentan en el espectro de radiación electromagnética que es visible para el ojo humano. Van desde una longitud de onda de 400 nm hasta 700 nm. Además, también se conocen con el nombre de espectro óptico de la luz. Ver Figura 9. La longitud de onda (la cual está relacionada a la frecuencia y la energía) de la luz es la que determina el color que percibimos. El rango de estos diferentes colores es bastante amplio y extenso, habiendo numerosos colores entre los que nos es posible distinguir. Algunos estudiosos y científicos no están de acuerdo entre sí sobre los diferentes rangos de las longitudes de onda, por lo que es difícil calcular con precisión en dónde comienza y en dónde acaba cada color. Esto se debe a que los límites de los colores se aproximan a medida que los mismos se van mezclando unos con los otros.. 24.
(25) 2.2.1 Espectro electromagnético:. Figura 9 Espectro electromagnético, énfasis en el espectro visible. (Tomado de: http://www.skepticalartist.com/wp-content/uploads/2013/06/Visible-spectrum.jpg). 2.2.2 Lo que se puede obtener del espectro visible El dominio óptico del espectro se denomina a aquel grupo de longitudes de onda directamente dependientes de la energía solar, es así, que las imágenes en el espectro visible no se pueden capturar en ausencia de la luz solar. La luz solar incide sobre los objetos de manera que su reflejo es lo que realmente se observa, el sol se encuentra a una temperatura radiante cercana a los 6000K, esto implica según la ley de Wien, que su máxima emitancia espectral se encuentra alrededor de los 0,48µm, este valor coincide con el color verde que aprecia el ojo humano. Las imágenes visibles captan la energía solar reflejada desde el sistema Tierra-Atmósfera entre las longitudes de onda 0.4 y 0.9 µm (Chuvieco, 1996). Se visualizan como una escala de grises desde el negro al blanco. Por ejemplo, si la resolución en el punto sub satélite es de 2,5 x 2,5 Km y si la estructura a identificar es más pequeña, el radiómetro integra la señal para todo el pixel apreciándose un único tono de gris. Los cuerpos aparecerán más o menos brillantes en la imagen dependiendo de su reflectividad, de la intensidad de la radiación solar y del ángulo de elevación del sol con respecto al horizonte terrestre.. La reflectividad es el factor principal. Un cuerpo aparecerá más brillante cuanto mayor sea su reflectividad y viceversa. En la Tabla 1 se muestra el albedo medio para diferentes superficies. Se observa cómo, en general, las nubes de gran desarrollo vertical son las mejores reflectoras. 25.
(26) Esto es debido a que la reflectividad en las nubes está fuertemente condicionada por su espesor. Así se observa en la tabla como a medida que las nubes van siendo menos espesas su reflectividad va disminuyendo. En menor medida, la reflectividad en las nubes depende también de la naturaleza y el tamaño de las partículas nubosas, reflejando mejor las gotas de agua que los cristales de hielo. Tabla 1 Albedo medio para diferentes superficies [17] Cumulonimbos (grandes y espesos). 92%. Cumulonimbos (pequeños hasta 6Km). 86%. Nieve Fresca. 80% - 85%. Agua (Sol cerca del horizonte) Cirroestratos (espesos, con nubes bajas) Cúmulos y estratocúmulos (más del 80% y sobre tierra) Estratocúmulos (más del 80% y sobre tierra) Estratos (espesos y sobre mar) Estratocúmulos (dentro de capas nubosas sobre mar) Nieve vieja. 50% - 80% 74%. Arena (Blancas, Nuevo Mexico, USA) Estratos (poco espesos sobre mar) Cirros (aislados sobre tierra) Cirroestratos (aislados sobre tierra) Cúmulos de buen tiempo (más de 80% y sobre tierra). 60% 42% 36% 32% 29%. 69%. Hierba. 20% - 25%. 68%. Tierras secas. 15% - 25%. 64%. Tierras húmedas. 10%. 60%. Bosques. 5% - 10%. 50% - 60%. Agua (sol cerca del cénit). 3% - 5%. En cuanto a la intensidad y el ángulo de elevación de la radiación solar habrá variaciones importantes dependiendo del lugar, hora y época del año. El caso extremo sería durante la noche, periodo en el que no existen las imágenes visibles al situarse el sol por debajo del horizonte. Es posible suavizar este efecto normalizando la imagen. Otro fenómeno relacionado es la aparición de "imágenes especulares": aunque las superficies de agua en condiciones normales son muy malas reflectoras, cuando se produce este fenómeno la cantidad de energía reflejada puede aumentar considerablemente. Suele darse en situaciones de viento muy lento, con la superficie del mar ligeramente rugosa; sobre esa superficie se produce una fuerte reflexión de los rayos solares, pero con suficiente “scattering”2 como para dispersar el efecto en un área de 100 o 200 Km.. 2. ldc.usb.ve/~alacruz/cursos/ci5321/Scattering/Informe.pdf : Scattering es un proceso físico en donde algunas formas de radiación, como el sonido, luz, o partículas en movimiento, son obligadas a desviarse desde una trayectoria recta por una o más no-uniformidades en el medio.. 26.
(27) 2.2.2.1. Efecto de las diferencias de iluminación en función de la hora del día.. En la Figura 10 se muestra la primera imagen (09:00 AM), de la secuencia de tres, en la que se aprecia el efecto de la inclinación de los rayos solares sobre la superficie de la Tierra y las nubes. Mientras que la mitad este aparece perfectamente iluminada, la mitad oeste está aún a oscuras.. 9:00AM. 12:00M. 3:00PM. Figura 10 Efecto de las diferencias de iluminación a diferentes horas del día. A la izquierda 9:00AM, en el centro 12:00M y a la derecha 3:00PM.. A pesar de que una acusada inclinación de los rayos solares parece un inconveniente en este canal, el hecho de que durante ese período se produzcan sombras puede ser una gran ventaja. Así es posible determinar la altura relativa de diferentes capas nubosas cuando las más altas "hacen sombra" sobre las que están más bajas. Es posible también observar donde se localizan los máximos desarrollos en un área de nubosidad convectiva ya que los "overshootings", al ser las partes más altas de la nube, son los primeros iluminados por el sol. De igual forma, las nubes de poco espesor y formadas por cristales de hielo, como es el caso de los cirros, que dan muy poca señal en este canal, a veces se pueden detectar gracias a la sombra que proyectan sobre la tierra (en concreto, cuando esta tiene un coeficiente de reflexión alto como es el caso de los desiertos). En las horas centrales del día (12:00M), cuando la inclinación de los rayos solares es prácticamente nula, el contraste entre el brillo de las diferentes estructuras es un aspecto fundamental que nos ayudará a identificarlas. En la imagen se observa, por ejemplo, el fuerte contraste que existe en general entre las nubes, la tierra y el mar, y cómo el contraste entre el mar y la tierra es mayor cuando la tierra es buena reflectora (costa norte de África) que cuando es mala reflectora (costa occidental de la mitad sur de África). Estas diferencias son debidas a las diferentes características del terreno, de la vegetación, etc. También es posible observar los distintos brillos dependiendo del tipo de suelo (mitad norte de África). Sin embargo aunque la diferencia de brillo es muy grande entre las nubes y la tierra, si por encima de ésta hay una capa de nieve o hielo el contraste puede llegar a ser nulo. Un caso extremo serían por ejemplo las nieblas de valle y la nieve, ambas con igual reflectividad e igual forma dendrítica. Para identificarlas por separado es necesario recurrir a una secuencia de imágenes, buscando señales de disipación o movimiento en las nieblas, frente a la nieve que permanecería completamente estática.. 27.
(28) De igual forma para los cirros el contraste puede servirnos de gran ayuda. Estos se observan mejor cuando por debajo tienen la superficie del mar (muy mala reflectora en condiciones normales) y peor si tienen la superficie de la tierra (y dentro de esta el caso extremo serían superficies desérticas) u otro tipo de nubes. En general el contraste entre nube y nube suele ser bastante malo y es por ello que para su identificación es necesario ayudarse con el canal IR (Segura Torres, 2013) o bien recurrir a otro tipo de características como su forma, tamaño o textura. Es posible aplicar correcciones a la imagen visible para evitar la variación en la intensidad de iluminación produciendo una imagen "normalizada", en las cuales se supone que el sol tiene, para cada uno de los puntos de la imagen, la misma elevación. Esto se consigue modificando los valores de brillo de las distintas partes de la imagen en función del ángulo de elevación solar, de forma que los valores normalizados sean independientes del ángulo de elevación solar en imágenes sucesivas, y puedan así ser comparados y usados de forma cuantitativa.. 2.2.3 Usos de las imágenes en espectro visible La interpretación de las imágenes en el espectro visible de forma especial, la relación que puede inferirse entre lo que se observa en las imágenes (en sus diferentes canales) y los procesos dinámicos y termodinámicos que tienen lugar en la atmósfera terrestre, se ha convertido, desde el lanzamiento de los primeros satélites meteorológicos, en una herramienta fundamental de todos los centros dedicados a la predicción meteorológica. Conforme se ha ido avanzando en el análisis e interpretación de los datos de los satélites, su uso se ha ido extendiendo rápidamente, sobre todo por lo que respecta a las tareas de vigilancia, diagnosis, “nowcasting” y predicción a muy corto plazo. Esto se ha debido, básicamente, a que las imágenes de satélite proporcionan una ayuda inestimable en la identificación del estado de desarrollo de los distintos fenómenos meteorológicos. Otras aplicaciones de las imágenes en el espectro visible son (Fallas, 2004): . Creación de mapas de uso cobertura Actualización de cartografía Estimación de productividad en cultivos Mapeo de áreas afectadas por fenómenos naturales extremos como erupciones volcánicas o inundaciones. Monitoreo de cambio en la cobertura y uso del suelo Monitoreo de biomasa Mapeo geológico Mapeo de estrés en vegetación Monitoreo forestal Aplicaciones militares Mapeo de incendios forestales. 28.
(29) . Hidrología Irrigación Monitoreo marino y costero Estudios de vegetación marina y algas etc…. Tabla 2 Características de las imágenes en el espectro visible. Resumen de características de imágenes en el espectro visible Las imágenes del espectro visible se caracterizan porque representan la cantidad de luz que es reflejada hacia el espacio por las nubes y la superficie de la Tierra. El agua y la Tierra se ven oscuras. Es difícil en estas imágenes discernir entre nubes altas y bajas Las nubes espesas reflejan más la luz por lo que éstas son las que mejor se visualizan. El espacio se verá de color negro dada su falta de iluminación. No se pueden obtener con ausencia de luz solar.. 2.2.4 ¿Es posible trabajar con solo una banda del espectro visible? (Azul, Roja o Verde). Dentro de las inquietudes que se plantean en este estudio de trabajo de grado ha surgido la pregunta ¿es posible trabajar en una sola de las bandas del espectro visible? y considerando el tipo de estudio de las imágenes que se realiza, cabe la posibilidad, como ejemplo se citan en particular en el sensor LANDSAT TM3: Banda 1 (azul): Estudio de aguas, discriminación entre suelos y cuerpos de agua. Banda 2 (verde): Estudio de la Vegetación Banda 3 (rojo): Medición de absorción de clorofila, buena discriminación ente coberturas vegetales. De la combinación de algunas de estas bandas con las bandas infrarrojas cercanas o intermedias se pueden realizar otros estudios que no se traerán al caso en este trabajo.. 3. Landsat Thematic Mapper. 29.
(30) 2.3 Caracterización de la imagen Para la adquisición digital de imágenes se necesitan dos elementos esenciales (Medina Daza, 2004): 1. Un dispositivo físico sensible a una determinada banda del espectro de energía electromagnética y que produzca una señal de salida proporcional al nivel de energía detectado. 2. Un dispositivo denominado digitalizador el cual es un dispositivo para convertir la señal de salida del sistema sensible a forma digital. De la unión de estos dos elementos se obtiene lo que se denomina Imagen digital que es una F(x,y) que se ha discretizado tanto en coordenadas espaciales como en brillo. Se puede considerar como una matriz cuyas coordenadas en filas y columnas identifican un punto de la imagen y el valor que corresponde a dicho elemento representa el nivel de gris en ese punto. La resolución, en la instrumentación, se define como la división más pequeña que un instrumento puede medir (Adhami, 2005). La resolución de un sensor, o instrumento de medida, usualmente determina la calidad del dispositivo y de la información tomada. En el caso de una imagen de la tierra existen 4 tipos de resoluciones importantes: espectral, espacial, temporal y radiométrica. Cada una de ellas aporta información sobre la calidad de la imagen y caracterizándola desde diferentes puntos de vista.. 2.3.1 Resolución Espectral (RE) “Indica el número y anchura de las bandas espectrales que puede discriminar el sensor. (Chuvieco, 1996) (Gutiérrez, 2006)”, “es una medida que depende de la posibilidad de discriminar anchos de banda y de la sensibilidad del sensor para distinguir niveles de fases” ((A.G.E.)). Lo anterior define la sensibilidad del dispositivo ante una frecuencia del espectro electromagnético Independientemente de la escala de integración que se observe, desde el punto de vista de dispositivo electrónico o desde el punto de vista de dispositivo integrado, un sensor tiene mayor resolución espectral entre más longitudes de onda pueda diferenciar y entre más selectivo sea en cada una de ellas. Desde el punto de vista de componentes electrónicos esta propiedad depende del material de construcción del sensor, este material determina a cuales anchos de banda responde y su eficiencia en cada uno; desde un punto de vista de un dispositivo compuesto, bien sea una cámara o un satélite por ejemplo, tiene una resolución espectral dada por la cantidad de sensores internos que lo componen. Los sensores más comunes responden a tres longitudes de onda principales, rojo (entre 750 nm – 590nm), verde (entre 570nm y 495nm) y azul (entre 495nm y 450nm) que es el espectro. 30.
Figure



+7



Documento similar
If certification of devices under the MDR has not been finalised before expiry of the Directive’s certificate, and where the device does not present an unacceptable risk to health
In addition to the requirements set out in Chapter VII MDR, also other MDR requirements should apply to ‘legacy devices’, provided that those requirements
The notified body that issued the AIMDD or MDD certificate may confirm in writing (after having reviewed manufacturer’s description of the (proposed) change) that the
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
Esto viene a corroborar el hecho de que perviva aún hoy en el leonés occidental este diptongo, apesardel gran empuje sufrido porparte de /ue/ que empezó a desplazar a /uo/ a
En junio de 1980, el Departamento de Literatura Española de la Universi- dad de Sevilla, tras consultar con diversos estudiosos del poeta, decidió propo- ner al Claustro de la
[r]
El Programa de Mecenazgo organiza un concurso para "Amigos del IAC" en el cual podrán realizar una propuesta de observación para un telescopio robótico 1. Aquellas que
