Escuela Superior de Ingeniería Mecánica y Eléctrica
Ingeniería en Control y Automatización
Construcción de dos robots
manipuladores para su aplicación en
sistemas multirobot.
TESIS
QUE PARA OBTENER EL GRADO DE
INGENIERO EN CONTROL Y
AUTOMATIZACIÓN
PRESENTAN:
GEOVANNI FLORES CABALLERO
CÉSAR ANDRÉS ROSALES TORRES
DIRIGIDA POR:
M. EN C. RICARDO TAPIA HERRERA
DR. JUAN JOSÉ MUÑOZ CÉSAR
Escti ELA SlJ
l'EllIOI{
OE ING ENI
ERíA [\1 EC'¡A.;\
I('A V r L fHGᄋイャセica@lJNII)AIJ
piセHIfesiHInO|l@ セセェ|uHIlイHI@t()PEZ
ェ|QaGイeHIsセG@QUE PARA OBTENER EL TITULO DE INGENIERO EN CONTROL Y AUTOMATIZACION POR LA OPCIÓN DE TITULACIÓN TESIS COLECTIVA y EXAMEN ORAL INDIVIDUAL DEBERA(N) DESARROLLAR C.GEOVANNIFLQRESCABALLERO
C. CESAR ANDRES ROSALES TORRES
"CONSTRUCCIÓN DE DOS ROBOTS MANIPULADORES PARA SU APLICACIÓN EN SISTEMAS MULTIROBOT"
CONSTRUIR DOS ROBOTS MANIPULADORES EMPLEANDO TRANSMISIÓN POR ESLABONAMIENTO DE CUATRO BARRAS PARA SU APLICACIÓN EN SISTEMAS COOPERATIVOS
セ@ CALCULAR LAS DIMENSIONES DE LAS BARRAS DEL MANIPULADOR A PARTIR DE LAS ECUACIONES DE ÁNGULO DE TR<\.NSMISIÓN y PUNTOS CRÍTICOS.
セ@ ESTABLECER LAS ECUACIONES DE CINEMÁTICA INVERSA y DIRECTA.
セ@ RELACIONAR LA INTERFAZ CON EL MANIPULADOR MEDIANTE UNA TARJETA DE ADQUISICIÓN DE DATOS (ARDUINO).
セ@ DESARROLLAR UNA INTERFAZ HMI EN LABVIEW PARA EL CONTROL DEL SISTEMA COOPERA TIVO.
MÉXICO D. F., A 30 DE SEPTIEMBRE DE 2013.
Me gustaría que estas líneas sirvieran para expresar mi más sincero y profundo
agradecimiento para todas aquellas personas que con su ayuda y comprensión hicieron
posible este proyecto:
A Dios por acompañarme todos los días.
A mi madre, por brindarme todo su cariño, comprensión y apoyo durante
las etapas más importantes de mi vida, por forjar en mí un hábito de
responsabilidad y rectitud incomparables, sin ti, este logro jamás hubiese
sido posible. Lo que tanto anhelaste ahora es una realidad que nos
pertenece, te quiero mamá.
A mi padre, por ser un amigo incondicional que siempre está conmigo en
momentos buenos y difíciles, por todos sus consejos y atenciones
prestadas, por ser mi gran ejemplo a seguir y por todos sus sacrificios
para que yo pudiera terminar mis estudios, te quiero papá.
A mi hermano, por su paciencia y ánimos brindados y porque
de forma incondicional comprende mis ausencias y mis malos
momentos, simplemente eres el mejor.
A mi tía Rosa Caballero García, por todo su gran apoyo en
momentos difíciles, por mostrarme el valor de la familia y por
recordarme que la vida es un gran reto que se toma a diario con
la mejor actitud. Te quiero tía.
A mis asesores: M. en C. Ricardo Tapia Herrera y el Dr.
Juan José Muñoz César, por su amistad y colaboración para
llevar a cabo el desarrollo esta tesis.
Agradecimientos
A Dios por brindarme la oportunidad de terminar una etapa más en vida.
Al Instituto Politécnico Nacional, a todos mis profesores y a mis directores de tesis, M. en
C. Ricardo Tapia Herrera y Dr. Juan José Muños Cesar por la formación académica y los
conocimientos proporcionados para la elaboración de esta tesis.
A mi familia, mis primas, mi tía Belinda, mi hermana María de los Ángeles, , sobre todo a
mi tío Armando por ser una fuente de inspiración que tanto necesite para este logro y en
especial a mis padres Balbina Torres Benítez y Leonardo Rosales Barriga por apoyarme
siempre incondicionalmente durante toda mi formación académica.
A mis compañeros y amigos que siempre me apoyaron y brindaron sus consejos, en especial
al ing. Flores Caballero Geovanni en quien encontré además de un compañero de tesis una
gran amistad.
I
Este trabajo presenta el diseño de un sistema cooperativo de dos manipuladores robóticos de cinco grados de libertad con articulaciones de revolución, a partir de las ecuaciones de cinemática inversa y cinemática directa. El control se basa en la aplicación directa entre la tarjeta Arduino y el software de LabView, tomando en consideración la flexibilidad que se pueda tener cuando se utilice la reconfiguración para diferentes tareas asignadas. Se presentan las ecuaciones para sintetizar mecanismos de las dimensiones especificadas, siendo un aspecto importante dentro del establecimiento de los diferentes parámetros para el movimiento de cada una de las mismas. Para el movimiento de cada servomotor se aplica una señal PWM (pulse width modulation) que sirve para posicionar en diferentes ángulos a los diferentes eslabones del mecanismo.
Para ubicar al efector final del manipulador en un punto específico se utiliza la cinemática inversa, dentro del conjunto de segmentos rígidos conectados mediante articulaciones, los múltiples ángulos que pueden adoptar estas articulaciones permiten un número indefinido de configuraciones o posiciones del efector final, así, mediante la solución al problema cinemático inverso se encuentran los valores de las coordenadas articulares del robot para que su extremo se posicione y oriente de acuerdo a la configuración deseada.
II
This thesis presents the design of a cooperative system of two robotic manipulators with five degrees of freedom with joints of revolution, from the equations of inverse kinematics and forward kinematics. The control is based on the direct application between Arduino board and LabView software, considering the adaptability that can get to have when using the reconfiguration for different tasks at one time.
Equations are presented for the synthesis of mechanisms bar dimensions, being an important aspect in the establishment of different motion parameters for each of them. However, for the movement of each actuator a PWM signal is used in order to position at different angles the different links of the mechanism.
To locate the end effector of the manipulator at a specific point using inverse kinematics, within our set of rigid segments connected by joints, multiple angles that allow these joints can take any number of configurations or positions end effector and, by solving the inverse kinematics problem are the values to be taken by the robot joint coordinates to its end position and orient according to a particular desired configuration.
III
Índice general
Resumen
………
I
Abstract
……….………..…II
Índice general
……….. ………...………….III
Índice de figuras
……….………..…VII
Índice de tablas
……….………
.XI
Introducción
……….………..
XII
Objetivo
………..………….…..XIII
Objetivos particulares
……….……XIII
Justificación
………...…………..XIX
Capítulo 1 Estado del Arte...
……….………1
Capítulo 2 Marco teórico
………..…………10
2.1 Eslabonamiento de cuatro barras………..….10
2.2 Descripción de vínculos……….. ……….11
2.3 Conceptos básicos de geometría espacial………...….…12
2.4 Incertidumbre cinemática……….. ….………12
2.4.1 Incertidumbre cinemática debido a la redundancia ……….…………..12
2.5 Teorema de Gruebler……….…..13
2.6 Marcos de coordenadas………..….15
2.7 Propiedades de un sistema cooperativo………..…….16
2.8 Cinemática………..……..18
2.8.1 Síntesis de tipo………..……18
IV
2.9.1 Posiciones críticas………..21
2.9.2 Análisis de rotabilidad……….…….22
2.10 Análisis de ventaja mecánica………..……25
2.11 Problema cinemático………..33
2.11.1Matriz de traslación………..33
2.11.2 Matriz de rotación……….34
2.12 Descripción de vínculos………....35
2.12.1 Descripción de la conexión de vínculos………..…36
2.13 Definición de matrices de elemento……….……...37
2.14 Cinemática directa………..38
2.15 Problema cinemático directo………..……….38
2.16 Cinemática inversa……….…….…….39
Capítulo 3. Solución de las ecuaciones cinemáticas y
dimensionales
……….
..40
3.1 Análisis de eslabonamiento………..………..41
3.2 Grados de libertad……….…..…..42
3.3 Parámetros básicos………..……….44
3.4 Análisis de movimiento………..46
3.4.1 Obtención de ecuación de lazo vectorial y ángulos de eslabón…………..46
3.5 Angulo de transmisión………53
V
3.8 Cinemática inversa……….…..……65
3.9 Espacio de trabajo cooperativo……….……..68
Capítulo 4. Interfaz en LabView y electrónica de potencia
……
71
4.1 Tarjeta de interfaz Arduino Mega 2560……….………72
4.2 Comunicación entre la computadora y la tarjeta Arduino Mega 2560……..….73
4.3 Circuito electrónico de potencia……….………77
4.4 Programación en LabVIEW………..……..81
4.5 Secuencia de programación ……….…………83
4.5.1 Entrada de coordenadas……….……..83
4.5.2 Código mathscrip ……….……….84
4.5.3 Compensación del ángulo……….……….85
4.5.4 Salida a servomotores………..……86
4.5.5 Pantalla HMI………87
Capítulo 5. Análisis de resultados
………..………….89
5.1 Análisis de trayectoria………..………..89
5.2 Análisis de velocidad………..…………92
VI
BIBLIOGRAFÍA………..98
Anexos……….…….99
Anexos A………..99
Anexos B………..103
VII
Figura 1.1 Sistema cooperativo de manipulación con diferentes puntos de contacto……3
Figura 2.1 Descripción de vínculos………....11
Figura 2.2 Tipos de sistemas coordenados………..12
Figura 2.3 Incertidumbre cinemática debida al contacto………....13
Figura 2.4 a) Izquierda: Trabajo cooperativo de los dedos sobre un objeto inmóvil b) Derecha: Cinemática, estática y la dinámica del sistema cooperativo.…16 Figura 2.5 Trayectoria nominal del centro de masa del objeto………..17
Figura 2.6 Dimensiones significativas (eslabón binario)………...…..19
Figura 2.7 Dimensiones significativas (eslabón ternario)………19
Figura 2.8 Configuración o posición inicial………..…..20
Figura 2.9 Posición límite en un mecanismo de cuatro barras………..22
Figura 2.10 Posición de puntos muertos en un mecanismo de cuatro barras……..….….22
Figura 2.11 Primera posición crítica en el eslabón de entrada……….…23
Figura 2.12 Primera posición de puntos muertos de la entrada……….………..24
Figura 2.13 Posición límite y de puntos muertos……….……24
Figura 2.14 Los centros instantáneos están en las juntas entre cada eslabón…………26
Figura 2.15 Centros instantáneos entre eslabones opuestos de un mecanismo de cuatro barras………..…27
Figura 2.17 Centro instantáneo común a la barra acoplada y transmisora……….…29
Figura 2.18 Centro instantáneo común a la barra acoplada y transmisora……….29
Figura 2.19 La base del sistema es un mecanismo en forma de paralelogramo………...30
Figura 2.20 Puntos fijos en A y paralelogramo formado por cuatro barras……….………30
Figura 2.21 Posición inicial del manipulador (vista frontal)………..….31
VIII
Figura 2.25 Representación de la traslación de un punto………....33
Figura 2.26 Articulaciones de vinculo……….….35
Figura 2.27 Representación de parámetros de Denavit-Hartenberg……….…36
Figura 3.1 Eslabones del manipulador de cuatro barras……….……41
Figura 3.2 Puntos de conexión de los eslabones………..42
Figura 3.3 Representación de las medidas de los eslabones………..……..44
Figura 3.4 Análisis de movimiento……….…….….47
Figura 3.5 Representación del ángulo del transmisión………54
Figura 3.6 Relación entre el ángulo de transmisión y el ángulo ………..………55
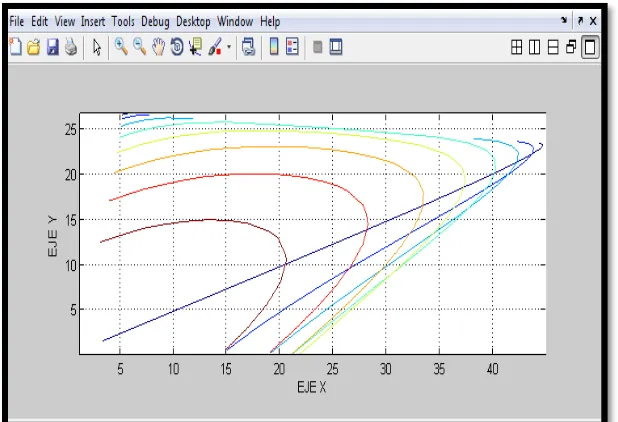
Figura 3.7 Representación del espacio de trabajo………57
Figura 3.8 Obtención del espacio de trabajo………..58
Figura 3.9 Representación del espacio de trabajo en los ejes X, Y………...…59
Figura 3.10 Representación del espacio de trabajo en los ejes Z, Y, X………...…59
Figura 3.11 Representación del espacio de trabajo en tres dimensiones……….60
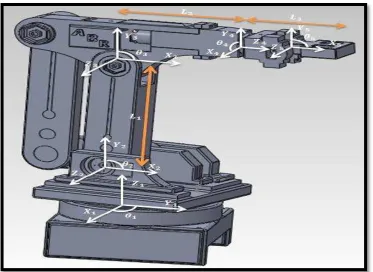
Figura 3.12. Parámetros de Denavit-Hartenberg………...61
Figura 3.13. Diagrama de análisis de cinemática inversa………65
Figura 3.14 Obtención del espacio de trabajo del sistema cooperativo………69
Figura 3.15 Espacio de trabajo sistema cooperativo………..….70
Figura 4.1. Descarga del programa para detectar la tarjeta en LabVIEW………..73
Figura 4.2. Conexión de la tarjeta con la computadora………....74
Figura 4.3.Toolkit de Arduino para LabVIEW………..……..74
Figura 4.4. Herramientas del Toolkit de Arduino para el panel frontal de LabVIEW………...75
Figura 4.5. Herramientas del Toolkit de Arduino para el área de bloques de LabVIEW……….…..75
IX
Figura 4.8. Etapa de acoplamiento de señal………..……..78
Figura 4.9.Circuito acoplador con transistor………..78
Figura 4.10. Circuito acoplador con salida al servo………..79
Figura 4.11. Circuito de potencia para un servo………...79
Figura 4.12. Secuencia de conexión para dos o más servos………..80
Figura 4.13. Izquierda. Bloque de inicialización. Derecha. Bloque de final………..81
Figura 4.14. Indicador de número de servos………..……81
Figura 4.15.Asignación del número de servo y su configuración del pin de salida en la tarjeta………....82
Figura 4.16.Escritura del ángulo del servo………...…….83
Figura 4.17. Entradas al bloque Mathscrip……….….84
Figura 4.18.Bloque de programación Mathscrip………..85
Figura 4.19. Bloque de compensación de ángulos de salida………..86
Figura 4.20. Salida de servomotores……….…………..86
Figura 4.21. Bloques de salidas a pantalla………...……..87
Figura 4.22.Panel principal de control en LabView……….………..88
Figura 5.1 Resultados en los puntos, X=0 Y= 15 Z=10 ………...……..90
Figura 5.2 Resultados en los puntos, X=0 Y= 5 Z=10 ………90
Figura 5.3 Resultados en los puntos, X=15 Y= 15 Z=15 ……….………..91
Figura 5.4 Incremento y decremento del pulso PWM de la posición inicial de 0° hasta la final de 50°……….…..93
Figura 5.5 Incremento y decremento del pulso PWM de la posición inicial de 10° hasta la final de 90° ………...93
X
Hasta la final de 156°………..94
Figura 5.8 Incremento y decremento del pulso PWM de la posición inicial de 0°
XI
Índice de tablas.
Tabla 3.2 Valores Denavit-Hartenberg……….………..61
Tabla 5.1 Vectores de puntos deseados………89
Tabla 5.1 Ángulos calculados manipulador maestro………...…………91
XII
Introducción
Los sistemas cooperativos se presentan en muchos ámbitos de la industria, ya que es similar a trabajar en equipo, sólo que entre manipuladores robóticos industriales, esto por supuesto facilita la realización de la actividad industrial y garantiza un mejor desempeño, sin embargo, dependiendo del tipo de trabajo que se tenga que realizar se asigna cierto tipo de manipulador, es decir, estas tareas deben ser enfocadas y clasificadas con una amplia selección tanto en características del robot manipulador como de las propias tareas a ejecutar.
Existen diferentes tipos de software de programación para los manipuladores industriales, en este trabajo se presenta el uso de LabVIEW, que tiene una característica muy importante, el enlace y reconocimiento de diferentes paqueterías, tales como MatLab, Multisim, AutoCAD y para este caso en específico Arduino.
El prototipo que aquí se presenta está dirigido hacia las PyMES, ya que es una forma de introducir nuevos diseños a bajo costo y conservando la funcionalidad para las actividades que se desarrollen.
XIII
Objetivo
Desarrollar dos robots manipuladores empleando transmisión por eslabonamiento de mecanismos de cuatro barras para su aplicación en sistemas cooperativos.
Objetivos particulares
Sintetizar el mecanismo de transmisión de cuatro barras
Calcular las dimensiones de las barras del manipulador a partir de las ecuaciones de ángulo de transmisión y puntos críticos.
Establecer las ecuaciones de cinemática inversa y directa para sistemas cooperativos.
Relacionar la interfaz con el manipulador mediante una tarjeta de adquisición de datos (Arduino).
Resolver en LabVIEW la programación del sistema cooperativo.
XIV
En las grandes industrias se han implementado manipuladores robóticos de gran costo, que son viables para los trabajos que realizan, sin embargo, en ocasiones tareas como posicionar un tornillo o trasladar una pieza que esté a una temperatura elevada no requieren un manipulador de gran tamaño ni mucho menos de gran costo.
Los manipuladores robóticos deben estar diseñados de acuerdo a las necesidades de cada labor en la industria, ya que los métodos que se utilicen ahorran tiempo y dinero de manera exponencial, así, llevando dichos métodos a las pequeñas y medianas empresas en donde no hay muchas posibilidades de instalar manipuladores de gran tamaño, ya sea por falta de espacio o porque no es conveniente y en ocasiones por los elevados costos. En la actualidad en muchos lugares no se tiene el conocimiento de la existencia de manipuladores a bajo costo y que satisfagan las necesidades de las pequeñas y medianas empresas, es por esto que se pretende emplear un mecanismo de cuatro barras, que sea práctico y sencillo de operar para introducirlo en sectores en donde no haya una gran cantidad de presupuesto pero que al mismo tiempo las tareas que le sean asignadas las realice con eficiencia. Se pueden crear algunos manipuladores con programación básica que se enfoquen a tareas específicas sin tener que diseñar grandes prototipos, esto deja principalmente el campo de las pequeñas y medianas empresas en un amplio rango para introducir manipuladores robóticos que se encarguen de pequeñas tareas dentro de un gran campo laboral.
Capítulo 1 Estado del Arte.
El término “sistema cooperativo” es generalmente entendido como un conjunto de
participantes que simultáneamente ejecutan una tarea dada. En robótica, el termino sistema cooperativo es entendido como un sistema de manipulación; el cual interactúa con un objeto, rígido o elástico. El trabajo cooperativo abarca el trabajo conjunto de los cooperativistas, su coordinación en la ejecución de las tareas, el contacto con el entorno y el contacto directo entre los mismos. El trabajo conjunto se refiere a la suma de los trabajos de los cooperativistas individuales, donde el trabajo de cada uno de los participantes puede ser independiente en tiempo y espacio del trabajo de los otros participantes, es usualmente entendido que el trabajo cooperativo se realiza simultáneamente. [2]
Cooperación significa que cada robot manipulador del sistema realiza su propio trabajo, tomando en cuenta el estado de los otros participantes, por lo tanto, para cada estado diferente de los mismos corresponde un diferente estado del otro manipulador y por supuesto del objeto también, esto asume que cada uno de los robots cooperadores recibe y posee información acerca del estado de los otros participantes del sistema. [2]
Para cada uno de los robots cooperadores, el objeto y los otros cooperadores están en principio en un entorno dinámico con el cual interactúa cada uno. A parte de los participantes en la cooperación, cada cooperador está constantemente en contacto con el espacio de trabajo.
2
La manipulación de un objeto a través de sistemas cooperativos se hace con la intención de:
Transferir un objeto de un lugar a otro.
Rastrear una trayectoria dada de algún objeto para poder dar una orientación a lo largo de otra trayectoria.
Realizar alguna modificación a un objeto fijo o móvil.
Para explicar el modo y etapas del trabajo de un sistema cooperativo, es necesario observar varios objetos fijos que pudieran ser transferidos por algunos manipuladores, uno por uno, de un lugar a otro a lo largo de una trayectoria predeterminada, mientras no causen daño al objeto ni entre ellos mismos. En la etapa inicial el efector final del manipulador está a cierta distancia del objeto. Las etapas, el contenido del trabajo, y las características esenciales del trabajo del sistema cooperativo en el objeto a manipular son:
Planear un enfoque hacia el objeto
Enfoque al objeto
Agarrar el objeto
Sostener el objeto
Levantar el objeto
Transferir el objeto
Bajar el objeto
Liberar el objeto
Retirar el efector final del objeto
3
No todos los manipuladores necesariamente se acercan simultáneamente al objeto, si el tomar el objeto inicia sin la sincronización de los otros manipuladores podría conducirse a un desplazamiento incontrolado del objeto. Para prevenir esto es necesario asegurar el cumplimiento de la etapa de sujetar el objeto cuando los otros manipuladores estén en la etapa de enfoque del objeto.
[image:21.612.98.516.304.539.2]En la etapa de sostener el objeto, las fuerzas correspondientes son establecidas entre el manipulador y el objeto, figura. 1.1 para no dañar el mismo durante su traslado. [1]
4
En las etapas de levantar, transferir y bajar el objeto, se asume el movimiento en un macro espacio, por lo cual el peso del objeto y todas las fuerzas producidas por el movimiento del objeto/manipulador son tomados por cada uno de los manipuladores, en estos movimientos las cargas inerciales son insignificantes.
En la etapa de retirar el objeto se asume una distancia segura del movimiento que realiza el manipulador y el lugar donde se dejó el objeto, después de esto un nuevo ciclo es planeado para el siguiente objeto, estas etapas del trabajo cooperativo asumen que el manipulador entra en contacto con el objeto. [2]
Por contacto se entiende el tacto mutuo de los manipuladores, tacto del manipulador y el objeto manipulado, o algunas de estas combinaciones, el sitio de interacción de los manipuladores y el objeto es llamado contacto, éste último representa el límite común de los materiales del cuerpo que entra en contacto. Una propiedad fundamental del contacto es la capacidad de transferir información a los participantes del sistema cooperativo; desde el punto de vista mecánico el transferir información es uno de los principales intereses, es decir, la información transferida se toma en cuenta para poder tomar decisiones sobre la estructura del manipulador que en el futuro entrará en contacto con el objeto, esto suele ser muy útil cuando hay variaciones de peso o de algún cambio físico por parte del siguiente objeto a manipular. [2]
Entender cómo funciona un mecanismo particular es bastante fácil, pero comprender como se originó y por qué se diseñó en esa forma específica, es más difícil. La tarea fundamental de conceptualizar los mecanismos sigue siendo una combinación de arte y ciencia. Existen actualmente muchos métodos sistemáticos para ayudar a crear mecanismos innovadores. Un movimiento cinemático deseado puede realizarse de muchas maneras diferentes, lo importante es diseñar un mecanismo apropiado.
5
Seleccionar el tipo apropiado de mecanismo, llamado tipo síntesis; escoger un tipo particular de eslabonamiento, por ejemplo un sistema de leva, un tren de engranes, un dispositivo de movimiento intermitente, como el mecanismo de ginebra o una combinación de ellos.
Determinar un conjunto de dimensiones apropiadas, o mejor aún, óptimas, para las diversas partes que comprenden el tipo de mecanismo escogido (llamado síntesis dimensional).
Está claro que el diseño de manipuladores no es un esfuerzo en una sola dirección y de un solo paso. A menudo, uno debe regresar sobre sus propios pasos, esto es, retroalimentación e iteraciones pueden ocurrir en cualquier etapa.
Muchos de los principios básicos del análisis y síntesis de mecanismos se conocen desde hace más de cien años, muchas de las técnicas empleadas tienden a ser de naturaleza gráfica, pueden hacerse más útiles al diseñador haciendo que la computadora lleve a cabo las porciones repetidas de las construcciones, con mucha mayor precisión que la que es posible alcanzar manualmente, entonces el diseñador puede concentrarse aún más en la etapa de síntesis abstrayendo el modelo analizable y experimentando con varios diseños en forma interactiva con la computadora. La aplicación de la computadora a los problemas de diseño ha tenido una historia relativamente corta. La evolución comenzó con los códigos de análisis en unidades centrales y ha progresado a métodos de diseño, amigables para el usuario, sobre computadoras personales o portátiles. [4]
6
En todos los otros casos hay un espacio real, por lo tanto se denomina no homogéneo para el primer caso y homogéneo para el segundo. Las propiedades del contacto son definidas con base en las características de la estructura del manipulador y también sobre los cuerpos en contacto, además de su mutua relación con el contacto durante la toma y desplazamiento del objeto.
Si el contacto envuelve dos cuerpos es posible tener tres combinaciones de los mismos, primero, un contacto rígido es formado entre dos participantes con estructuras rígidas, segunda, un contacto elástico es formado si las estructuras de ambos participantes son elásticas y tercera, si una de las caras de algún participante es elástica y se adjunta a una cara rígida, por lo tanto este último contacto es tratado como rígido. [2]
Durante el contacto, las superficies de contacto pueden ser traslacionales o rotacionales, fijas o móviles con respecto una de la otra. Los desplazamientos en el contacto son causados por un corrimiento o un macro movimiento rotacional de cada uno de los participantes.
En la rotación alrededor de un eje fijo, todas las partículas se mueven a lo largo de trayectorias circulares. Aquí todos los segmentos de línea en el cuerpo experimentan un desplazamiento angular, una velocidad angular y una aceleración angular iguales. Una vez que se conoce el movimiento angular del cuerpo, entonces puede obtenerse la velocidad de cualquier partícula situada a una distancia r del eje. [2]
La aceleración de cualquier partícula tiene dos componentes. La componente tangencial responde al cambio de la magnitud de la velocidad y el componente normal del cambio de la dirección de la velocidad.
7
Cada uno de estos objetos puede considerarse como una partícula, ya que el movimiento de cada uno se caracteriza por el movimiento de su centro de masa y se omite cualquier rotación del cuerpo. La cinemática de una partícula se caracteriza al especificar, en cualquier instante, su posición, velocidad y aceleración.
El método del centro instantáneo es un procedimiento muy útil que, a menudo, es más rápido para el análisis de eslabonamiento. Un centro instantáneo es un punto en el que no se tiene velocidad relativa entre dos eslabones de un mecanismo en ese instante. El punto en el que dos eslabones no tienen velocidad relativa es obviamente el punto neutro. De hecho para todas las posiciones en el movimiento de los dos eslabones el centro instantáneo está localizado en el punto neutro.
Si se conoce la velocidad absoluta de un punto, digamos un punto A de un eslabón, entonces con ayuda del centro instantáneo del eslabón y con respecto a tierra, se obtiene una simple ecuación que dará la velocidad absoluta de cualquier otro punto en el espacio de trabajo del eslabón.[3]
Debido a que se requieren dos cuerpos o eslabones para crear un centro instantáneo (CI), se puede predecir fácilmente la cantidad de centros instantáneos que se esperan de un conjunto de eslabones. Los centros instantáneos, algunas veces se denominan centros o polos.
Uno de los principales criterios de los que debe estar consiente un diseñador, es la capacidad de un mecanismo en particular para transmitir pares o fuerzas. Algunos mecanismos, como un tren de engranes, transmiten una razón de par constante entre la entrada y la salida porque tienen una razón de velocidad constante entre la entrada y la salida. Sin embargo, en un eslabonamiento de cuatro barras se tienen criterios de torque y velocidad para cada diseño, aunado a las diferentes formas de dimensionar una barra. [2]
8
entornos muy dinámicos en exteriores. Al mismo tiempo, para afrontar ciertas aplicaciones, la cooperación en grupos de varios robots se ha convertido en una necesidad. Una tendencia en la actualidad es la investigación en sistemas que consideren la colaboración entre robots y sensores presentes en el entorno para una gran cantidad de aplicaciones como robótica de servicio en entornos urbanos, o monitorización de desastres. La razón fundamental es que estas aplicaciones involucran entornos dinámicos, con condiciones cambiantes para la percepción. En la mayoría de las ocasiones, un único agente como un robot o una cámara, no permiten conseguir la robustez y eficacia necesarias, en estos casos, la cooperación entre diferentes robots y sensores en el entorno puede ser muy relevante.
En [4] se trata el tema de la cooperación entre robots móviles y su interacción con sensores de visión y obstáculos. Romeo es un móvil eléctrico que ha sido modificado con sensores, actuadores y procesadores para la navegación autónoma. Sus capacidades se han incrementado para poder navegar en entornos urbanos, de esta forma sincronizado con Romeo 2, que es su similar, se puede llevar a cabo un mapeo a distancia del terreno para que naveguen hacia un punto en particular y así poder realizar sus objetivos. Disponen de codificadores en las ruedas para la estimación de la velocidad, giróscopos y una unidad de medida inercial para estimar sus ángulos y velocidades angulares. Asimismo, disponen de cuatro sensores de distancia láser y una cámara para la navegación y la localización en su respectiva área de trabajo.
Una de las posibles aplicaciones de la robótica móvil en robótica de servicio es el guiado e incluso el transporte de personas y objetos en entornos urbanos. Por ejemplo, en zonas peatonales o zonas que se convierten en peatonales en las ciudades para mejorar la calidad de vida de las mismas.
9
enfrenta, para finalmente describir algunas de las metodologías que se han utilizado para su diseño. Los investigadores se han enfocado en extender las metodologías existentes, estas extensiones se han realizado principalmente en dos áreas: sobre las metodologías orientadas a objetos y sobre las de ingeniería de conocimiento, dentro de estas últimas se hace un gran estudio en los sistemas cooperativos tanto de manipuladores móviles como brazos robóticos, es decir, que los sistemas multi-robot son muy importantes cuando se determina que la interacción entre ellos pueden ser robusta, adaptable o flexible.
También se hace mención a la arquitectura dinámica configurable y su objetivo que es el de brindar a las comunidades robóticas más flexibilidad y capacidad de adaptación al medio, sin embargo, hay que tomar en cuenta que en cualquier área en la que se esté trabajando son importantes ciertos conceptos para los sistemas cooperativos:
Agente: Se concibe como una unidad funcional del sistema cooperativo, el cual es una entidad física o abstracta que puede interactuar con su ambiente, con capacidades de evaluar y tomar decisiones para un mejor desempeño de sus actividades.
Comunicación: Es la forma más común de interacción entre agentes ya que permite el establecimiento de señales o medios que se pueden interpretar por cualquiera de los integrantes del sistema cooperativo y que altera el estado de los mismos de tal forma que los robots trabajan en función de un objetivo relevante para el sistema.
Capítulo 2 Marco teórico.
2.1 Eslabonamiento de cuatro barras
Los mecanismos se usan en una gran variedad de máquinas y dispositivos. El eslabonamiento de lazo cerrado más simple es el de cuatro barras, que tiene tres eslabones móviles (más un eslabón fijo). El eslabón conectado a la fuente de potencia se llama eslabón de entrada, el eslabón seguidor conecta uno de los eslabones móviles y el eslabón acoplador o flotante conecta los dos eslabones móviles acoplando el eslabón de entrada con el eslabón de salida. [6]
Los puntos sobre el eslabón acoplador, llamados puntos trazadores de trayectorias, trazan en general curvas acopladoras algebraicas para el eslabonamiento de cuatro barras que es la cadena más básica de eslabones conectados por juntas que permite un movimiento relativo entre los eslabones, así de esta forma, tres eslabones articulados entre sí constituyen una estructura.
No obstante que se trata de un mecanismo simple, las cuatro barras forman un mecanismo muy versátil usado en muchas aplicaciones, y aunque éstas son muy diferentes, los eslabonamientos pueden clasificarse en tres tipos dependiendo de las tareas que realizan: generación de función, generación de trayectoria y generación de movimiento (o guía de cuerpo rígido). [7]
11
Un generador de función es un eslabonamiento en el que el movimiento (o fuerzas) entre eslabones conectados a tierra es de interés. En la generación de función, la tarea no requiere un punto trazador de trayectoria sobre el eslabón acoplador.
En la generación de trayectoria nos interesa solo la trayectoria de un punto trazador y no la rotación del eslabón acoplador. En la generación de movimiento es de interés el movimiento total del eslabón acoplador: las coordenadas x, y del punto trazador de trayectoria y la orientación angular del eslabón acoplador. [5]
2.2 Descripción de vínculos
Un manipulador puede considerarse como un conjunto de cuerpos conectados en una cadena mediante articulaciones. Estos cuerpos se llaman vínculos o segmentos. Las articulaciones forman una conexión entre un par adyacente de vínculos, figura. 2.1. El término par menor se utiliza para describir la conexión entre un par de cuerpos, cuando el movimiento relativo se caracteriza por dos superficies que se deslizan una sobre la otra. Las consideraciones de diseño mecánico recomiendan que los manipuladores se construyan generalmente de articulaciones que exhiban sólo un grado de libertad. La mayoría de los manipuladores tienen articulaciones angulares o articulaciones deslizantes llamadas articulaciones prismáticas. [3]
12 2.3 Conceptos básicos de geometría espacial
Un sistema de coordenadas es un sistema que utiliza uno o más números (coordenadas) para determinar la posición de un punto o de otro objeto geométrico. En la figura. 2.2 se pueden apreciar los diferentes tipos de sistemas que se tienen así como la orientación de los ejes.
2.4 Incertidumbre cinemática
La incertidumbre cinemática en la manipulación cooperativa surge como una consecuencia de la redundancia de los manipuladores y/o del contacto y sus características. [7]
2.4.1 Incertidumbre cinemática debido a la redundancia
La incertidumbre cinemática en la manipulación cooperativa surge en el caso de utilizar manipuladores redundantes cuyo índice de movilidad es mayor que el número de grados de libertad del efector final del manipulador. Esto se puede apreciar en la figura. 2.3, donde se tienen ángulos no especificados y aparte los requeridos, dando como resultado las posiciones y los ángulos en la redundancia y no redundancia. [7]
13
El contacto impone dos limitaciones, en las cuales dos cantidades dependen de tres cantidades, de acuerdo a la fig. 2.3.
Como en el caso anterior de incertidumbre cinemática, después de establecer el requisito sobre el objeto, aparece un número infinito de posiciones del manipulador para satisfacer ese requisito. La Incertidumbre cinemática, sin embargo, no es esencialmente un problema cooperativo. [2]
2.5 Teorema de Gruebler
Consideremos el ejemplo más simple del trabajo cooperativo de dos manipuladores con el que se puede explicar el problema de la restricción que impone el grado de libertad del mecanismo conforme a la estructura y los movimientos del mismo. Gruebler propone el uso de la ecuación 2.1 para la movilidad del mecanismo. [3]
14 Dónde:
Los manipuladores sostienen el objeto para que quede inmóvil. Se deja que el contacto entre los puntos y el objeto queden en el mismo plano vertical. Los manipuladores pueden tomar el peso del objeto y finalmente, el efector final del manipulador pueda pegarse al objeto, y así transferir una única fuerza a lo largo de la vertical. Entonces con el teorema de Grubler y la condición antes mencionada se determina el número de grados de libertad general que se utiliza el sistema. En primer lugar, se adopta el sistema de coordenadas de referencia y orientación de la posición de coordenadas, por ejemplo, de , hacia arriba. La orientación adoptada es positiva y está marcada por una flecha en la coordenada z. Las proyecciones de los vectores, cantidades, etc., en esta dirección se representan por la misma direccional. La aplicación de la convención de notación general en la descomposición del sistema en subsistemas y en la extracción de cada uno de sus elementos, es una forma de abordar el diseño del mecanismo.
15
resultado son las fuerzas de inercia, amortiguación y externas que actúan sobre todo el objeto.
Si las fuerzas de contacto son conocidas, el peso del objeto G está determinado. Sin embargo, si el peso se conoce, hay una número infinito de formas de distribución de la carga en los contactos, es decir, en el manipulador se establecerán consejos para ocupar el peso del objeto. Esta propiedad del sistema cooperativo se conoce como "el problema de la fuerza de incertidumbre”. Si el objeto es rígido y si no hay peligro de su rotura, el problema puede resolverse fácilmente permitiendo que las fuerzas de contacto de los manipuladores se ejerzan sobre el objeto sin problema alguno.
2.6 Marcos de coordenadas
Un ejemplo sencillo de un sistema cooperativo del tipo de manipulación es el que se presenta en la figura 2.4 (a). Tres dedos: el pulgar, el dedo índice y el dedo medio agarran un objeto, haciendo un contacto rígido, esta propiedad de un sistema tan sencillo se presenta sobre la base de la descripción de la cinemática, estática y la dinámica del sistema cooperativo aproximado como se muestra en la figura. 2.4 (b). Un sistema de aproximación cooperativo (en adelante, el sistema cooperativo) será la base de todos los análisis del trabajo cooperativo.
El análisis supone tales parámetros en los que el valor calculado asignado a una cantidad en el espacio también se puede obtener o confirmar por medición. La calidad de la adoptada aproximación determina la calidad de los resultados del análisis.
16 2.7 Propiedades de un sistema cooperativo
El problema de las propiedades nominales como la sujeción, levantamiento y presión sobre un objeto del sistema cooperativo es esencialmente lo que hace más complejo el sistema mediante la introducción de las características elásticas del sistema cooperativo. La solución a este problema es el movimiento de un sistema cooperativo, donde los sistemas principales se analizan utilizando los métodos de manipulación cooperativa, así como los movimientos macro y micro de los robots. El movimiento del sistema cooperativo, en el que el objeto en primer lugar se agarra y luego se transfiere, por lo que el movimiento del manipulador no se ve significativamente perturbado por las condiciones de agarre (es decir, la configuración geométrica que se dio cuenta al final de la fase de agarre no se cambia significativamente) se adopta como movimiento coordinado del sistema. [8]
Figura 2.4 a) Izquierda: Trabajo cooperativo de los dedos sobre un objeto inmóvil.
17
El movimiento coordinado del sistema de cooperativos está basado en un procedimiento de dos etapas, en el que las cargas de contacto con el sistema rígido se determinan aproximadamente. Sobre la base de los valores aproximados de contacto, fuerzas o pares de apriete, adoptados como nominales, los procedimientos se proponen para la aproximación de las demás cantidades nominales del sistema cooperativo en general.
Una trayectoria nominal es una trayectoria no perturbada que es realizada por el sistema cooperativo durante su movimiento nominal. La entrada nominal es el vector externo de acciones en que se realiza el movimiento nominal. [1]
La entrada a un sistema cooperativo está representada por el servomecanismo de conducción. Por el par nominal de un sistema cooperativo se entiende la entrada nominal y su correspondiente trayectoria nominal figura 2.5.
Las fases de aproximación y agarre en las que no es exacto pero sí hay una posición aproximada del objeto manipulado MC, durante la aproximación, un manipulador es lo primero que hace y establece contacto con el objeto, sin cambiar su posición.
18
Además, los otros manipuladores también forman contactos, y el agarre se lleva a cabo sin algún cambio significativo en la posición del objeto.
2.8 Cinemática
La cinemática es el estudio del movimiento de los mecanismos y de los métodos para crearlos. La primera parte de ésta definición se relaciona con el análisis cinemático. Dado cierto mecanismo, las características de movimiento de sus componentes se determinan por análisis cinemático. El enunciado de la tarea de análisis contiene las dimensiones del mecanismo más importante, las interconexiones de sus eslabonamientos y la especificación del movimiento de entrada o del método de accionamiento, ésta es la esencia de las cadenas cinemáticas para determinar el movimiento de un mecanismo dado. [3]
2.8.1 Síntesis de tipo
Dada la aplicación que se requiera, ¿qué tipo de mecanismo será adecuado? ¿Eslabonamientos? ¿Mecanismos de leva? ¿Trenes de engranes? Además ¿Cuántos eslabonamientos deberá tener el mecanismo? ¿Cuántos grados de libertad se requieren? ¿Qué configuración es deseable?, etc. Las deliberaciones relacionadas con el número de eslabonamientos y grados de libertad a veces se consideran dentro del ámbito de una subcategoría de la síntesis de tipo llamada síntesis de números. [12]
2.8.2 Síntesis dimensional
La mejor forma de describir la segunda categoría principal de la síntesis cinemática es expresando su objetivo: la síntesis dimensional busca determinar las dimensiones significativas y la posición inicial de un mecanismo de un tipo preconcebido para una tarea especificada y un rendimiento prescrito.
19
figura 2.6, ternarios figura 2.7, etc., al ángulo entre palancas de una manivela de campana, a las dimensiones de contorno de levas, diámetros de seguidores de leva, excentricidades, relaciones de engranes y demás.
Figura 2.6 Dimensiones significativas (eslabón binario)
20
La configuración o posición inicial suele especificarse mediante una posición angular de un eslabonamiento de entrada con respecto al eslabonamiento fijo o marco de referencia, o la distancia lineal de un bloque deslizante a partir de un punto en su eslabonamiento guía figura 2.8.
Un mecanismo de tipo preconcebido puede ser un eslabonamiento de cuatro barras o un eslabonamiento más complejo con cierta configuración definida topológica pero no dimensionalmente.
2.9 Cadenas cinemáticas
Los eslabones están interconectados en pares en puntos de contacto llamados juntas. Esa parte de la superficie de los eslabones, la cual hace contacto con otro eslabón es llamada un elemento par. [8]
21
La combinación de dos de estos elementos constituye un par cinemático. Una junta conectando dos eslabones constituye un par simple, pares dobles, pares triples o pares múltiples en general, ocurren en juntas donde tres, cuatro o más eslabones están conectados.
2.9.1 Posiciones críticas
Dependiendo de la capacidad de rotar de los eslabones motriz y conducido respecto a su eje de rotación, rotabilidad, los mecanismos de cuatro barras se clasifican en:
a) Doble oscilatorio: cuando ambos eslabones únicamente pueden oscilar menos de 360°
b) Rotatorio-Oscilatorio: Cuando uno de los eslabones motriz o conducido puede rotar, mientras que el otro solamente puede oscilar.
c) Doble rotatorio: Cuando ambos eslabones pueden rotar.
La rotabilidad de los eslabones de entrada y salida de un mecanismo, está íntimamente ligada a la aparición de ciertas posiciones conocidas como posiciones críticas, existen dos diferentes tipos de posiciones críticas.
1.- Posición límite: Una posición límite para el eslabón de salida, en un mecanismo de cuatro barras, ocurre cuando el ángulo interior entre el eslabón acoplador y el de salida es de 180° a 360°; es decir, las revolutas M, A, B están en línea como se muestra en la figura 2.9.
22
El principal motivo de este análisis consiste en determinar las relaciones que deben satisfacer las longitudes de los eslabones de un mecanismo plano de cuatro barras a fin de que el mecanismo tenga una mayor movilidad.
2.9.2 Análisis de rotabilidad
Las situaciones más comprometidas ocurren cuando los eslabones de entrada y salida se alinean con el eslabón fijo; es decir, cuando los eslabones de entrada y salida tratan de extenderse hacia el exterior.
Figura 2.9 Posición límite en un mecanismo de cuatro barras
23
Eslabón de entrada: La primera situación crítica para el eslabón de entrada se muestra en la figura 2.11.De la desigualdad del triángulo se tiene:
a1 + a2 < a3 + a4 (2.2)
Si se satisface esta condición, el eslabón 2 podrá tomar la posición
Si por el contrario se satisface que:
a1 + a2 > a3 + a4 (2.3)
Se presenta una posición de puntos muertos, un ejemplo de esta posición se muestra en el ejemplo de la figura 2.12.
El ángulo para el cual ocurre esta posición está dado por la ley de los cosenos:
24
(2.4)
Como puede verse las condiciones no son excluyentes y cuando se satisfacen ambas se obtiene que:
(2.5)
El eslabón de entrada puede tomar la posición , sin embargo presenta una posición de puntos muertos que al mismo tiempo constituye una posición límite, esta posibilidad se muestra en la figura 2.13.
Figura 2.12 Primera posición de puntos muertos de la entrada.
25
Dentro de los puntos muertos tenemos límites que presentan varias trayectorias que se pueden aplicar para diferentes movimientos, sin embargo sólo se toman aquellos que sean necesarios para un mejor funcionamiento de la tarea asignada.
2.10 Análisis de ventaja mecánica
Utilizamos la técnica de centros instantáneos para realizar un análisis de fuerzas, el cual es útil para determinar posibles mejoras al operador actual.
El eslabón de entrada y el eslabón de salida están relacionados con la potencia de ambos, es decir, si suponemos que las pérdidas de energía en un eslabonamiento durante su movimientos son pequeñas, entonces, la potencia que entra deberá ser igual a la potencia que sale.
Es decir,
Dónde:
W= velocidad angular (rad/seg) y T par motor (in/lbf)
En este caso:
O bien
26
Para tener una mejor comprensión de los eslabones usaremos la siguiente tabla de movimiento referido en mecanismos de eslabones. Por lo tanto como se ha mencionado anteriormente, un centro instantáneo es un punto en el que no se tiene velocidad relativa entre dos eslabones de un mecanismo en ese instante, el sistema de dos eslabones consiste en un eslabón dos y uno a tierra, que están unidos por A por una junta de revoluta tal y como se muestra en la figura 2.14.
27
Dentro de los centros instantáneos opuestos existen diferentes formas de representación separadas finitamente del eslabón acoplador del eslabonamiento de la figura 2.15, las dos posiciones separadas de los puntos A0 y B0 están
representadas por “a” y “b”, si se dibuja el bisector perpendicular B0 CI, cualquier
punto a lo largo de ésta línea podría servir como pivote a tierra que, conectado a B, servirá como centro de rotación, de A0 a B0. Este es el punto que si se conectara, rígidamente al eslabón acoplador AB podría girar de la posición uno a la posición dos. El movimiento del eslabón acoplador entre posiciones no se duplicaría, pero las dos posiciones extremas serían exactas. Por definición la ventaja mecánica (V.M.) es la razón de las magnitudes de la fuerza de salida y la fuerza de entrada:
28
Dónde:
Combinando las ecuaciones (2.7) y (2.8) y notando que el par es el producto de una fuerza por un radio,
Supóngase que el eslabón principal de cuatro barras va a usarse como mecanismo impulsor de la barra acopladora entonces tenemos que las dos barras forman parte de un mismo centro instantáneo como se muestra en la figura 2.17, ya que los dos puntos que se deben tratar son de gran interés para el análisis de la ventaja mecánica.
29
Figura 2.17 Centro instantáneo común a la barra acoplada y transmisora
30
La base del eslabonamiento del sistema de cuatro barras es un paralelogramo que trata de un caso especial, los eslabones cortos están separados por dos eslabones largos, los cuatro eslabonamientos son controlables a través de los puntos fijos de la base, es un mecanismo de cuatro barras capaz de producir un movimiento acoplador con la barra de transmisión de movimiento, formando trayectorias con arcos y medios círculos, dando una mayor estabilidad al sistema, esto se puede apreciar en las figuras 2.17 y 2.18 donde se hace una comparación entre la similitud del mecanismo.
Figura 2.19 La base del sistema es un mecanismo en forma de paralelogramo
31
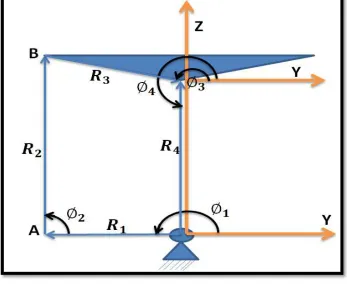
De acuerdo al mecanismo de cuatro barras tenemos una descripción de los cuatro puntos básicos dentro de la configuración establecida que lleva a la representación del paralelogramo en un diagrama básico pero que funciona como un descriptor de barras para el análisis en conjunto figuras 2.19 y 2.20.
En las figuras 2.21 y 2.22 tenemos una descripción de los movimientos básicos sin más antecedentes para introducirnos en las principales combinaciones de movimientos de los eslabones del manipulador.
Adoptar la posición inicial del manipulador es un paso muy importante para establecer los ejes coordenados a partir de los cuales se van a establecer los movimientos de los eslabones, sin embargo debemos conocer el esquema sobre el que se trabaja dentro del mecanismo de cuatro barras, para esto debemos establecer los ángulos a los que se tiene acceso con respecto al marco de referencia del manipulador, lo cual se puede ver gráficamente en la figura 2.23.
Figura 2.21 Posición inicial del manipulador (vista frontal)
32
[image:50.612.161.463.96.335.2]Para el estudio del manipulador tenemos el centro instantáneo en el punto A0 porque no se tiene una velocidad relativa entre los dos eslabones del mecanismo en ese instante, entonces el punto con respecto a tierra, es una simple construcción que dará la configuración del eslabón consecutivo en el ambiente de movimiento relacionado con el eslabón adjunto o adyacente, sin embargo tenemos que tomar en consideración la relación entre la magnitud y la distancia entre desde el centro instantáneo, para poder determinar el lugar de la ubicación del eslabón.
33 2.11 Problema cinemático
Es el estudio del movimiento del manipulador con respecto a un sistema de referencia.
2.11.1Matriz de traslación
Sea un sólido rígido en un espacio tridimensional; un punto P del mismo vendrá definido por tres coordenadas (X, Y, Z) que agrupamos en un vector { }, tal que:
Una traslación vendrá definida por un vector {d} figura 2.25 de modo que, si se aplica a un sólido, el punto de posición { } pasara a ocupar una nueva { } definida por:
34
De aquí se forma una matriz (4x4) de forma que:
O en notación compacta:
Donde es la matriz de traslación.
2.11.2 Matriz de rotación
En el caso de tres dimensiones; el procedimiento a seguir depende de la forma en la que la rotación venga definida, está determinada por tres rotaciones ,,
alrededor de los ejes x, y, z, respectivamente, cada una de ellas queda representada por las matrices:
La rotación total se calcula mediante el producto matricial:
35
La ecuación permite obtener, entonces, la matriz de rotación en tres dimensiones.
2.12 Descripción de vínculos
Un manipulador se considera como un conjunto de cuerpos conectados en una cadena mediante articulaciones, estos cuerpos se llaman vínculos o segmentos. El término par menor se utiliza para describir la conexión entre un par de cuerpos. [3]
En la figura 2.26 se muestran las seis posibles articulaciones de par menor.
Para numerar los vínculos se empieza numerando desde la base inmóvil del manipulador, la cual podemos llamar vinculo 0, el primer vinculo móvil es el número 1 y así sucesivamente. Cuando se desean obtener las ecuaciones cinemáticas del mecanismo, un vínculo se considera solamente como un cuerpo rígido que define la relación entre dos ejes de articulaciones adyacentes de un manipulador.
36
2.12.1 Descripción de la conexión de vínculos.
El vínculo y la línea mutuamente perpendicular es sobre la cual se mide la longitud del vínculo, , el segundo parámetro se llama torsión de vinculo, en un plano cuya normal sea la línea mutuamente perpendicular que se acaba de construir, podemos proyectar los ejes hasta el eje en sentido de la mano derecha, sobre , siendo así el vínculo, .
Los vínculos adyacentes tienen un eje de articulación común entre ellos. Uno de los parámetros de interconexión tiene que ver con la distancia a lo largo de este eje y hasta el siguiente y es el desplazamiento del vínculo llamado . El siguiente vínculo describe la cantidad de rotación sobre el eje en común entre un vínculo y su vínculo adyacente, por lo que es llamado ángulo de articulación .
Cualquier robot puede describirse en forma cinemática proporcionando los valores de cuatro cantidades para cada vínculo. Dos describen el vínculo entre sí, y los otros dos describen la conexión del vínculo con uno adyacente.
La definición de mecanismos por medio de estas cantidades es una convección que generalmente se le conoce como notación Denavit-Hartenberg figura 2.27.
37
2.13 Definición de matrices de elemento
Siguiendo la notación de Denavit-Hartenberg, cada elemento se encuentra definido por dos condiciones, a saber; la distancia entre los dos pares y el
ángulo que forman, medido en un plano perpendicular a esta distancia “ángulo de
torsión ”. De acuerdo con ello es la distancia entre los elementos y el ángulo.
El origen de coordenadas del sistema asociado al elemento (i) se coloca en el punto .
Una vez que se han definido los sistemas de coordenadas para todos los elementos, se puede plantear la relación entre los sistemas , de acuerdo con la secuencia siguiente:
1.- girar el ángulo alrededor de .
2.- trasladar la distancia a lo largo de .
3.- girar el ángulo alrededor de .
4.- trasladar la distancia a lo largo de .
Esta secuencia se produce mediante los productos matriciales:
38
Que operando resulta:
2.14 Cinemática directa
Para resolver la cinemática directa se hace uso de la matriz homogénea que define la posición y orientación del elemento (i) respecto del sistema global, se puede obtener mediante el producto de las sucesivas matrices de transformación. En cuanto a la posición de la mano con respecto al sistema de referencia del elemento (i), está definida mediante una siendo:
De donde se obtendrá una matriz:
2.15 Problema cinemático directo
39 2.16 Cinemática inversa
El problema cinemático inverso cosiste en la obtención de las posiciones posibles de todos los elementos del manipulador, cuando se conoce la posición y orientación de la mano de sujeción . [3]
Puede solucionarse sin que sea necesario recurrir a procedimientos iterativos de resolución de sistemas de ecuaciones no lineales.
Tales procedimientos requieren un número de operaciones tan grandes, que harían imposible el control eficaz del robot, el enfoque más adecuado para resolver el problema consiste en dividirlo en dos, en el primero se obtiene el
“vector de posición” de la muñeca y con el de los tres primeros pares cinemáticos.
Por lo que respecto a los pares 4, 5 y 6, se resuelven utilizando los valores de los tres primeros vectores y las submatrices de orientación correspondientes.
Por lo tanto el vector de posición {p} en el sistema de referencia global ( ) se obtiene como:
Dónde:
Capítulo 3. Solución de las ecuaciones
Cinemáticas y Dimensionales
En este capítulo se abordara el desarrollo del trabajo, empezando con la comprobación del mecanismo propuesto para el manipulador, tomando puntos específicos de análisis en los cuales los mecanismos presentan ciertas consideraciones que se deben tomar muy en cuenta.
En primera instancia se validara el diseño del mecanismo de cuarto barras, esto se logra a partir del análisis de los grados de libertad, puntos críticos, análisis de movimiento, validación de las dimensiones, ángulos de transmisión, ventaja mecánica, etc., para lo cual se apoyara de ciertos teoremas y criterios antes expuestos en el capítulo 2.
El eslabonamiento de cuatro barras no puede generar sin errores una trayectoria arbitraria y solo puede coincidir con ella en un número limitado de puntos de precisión, no obstante, se le utiliza ampliamente en la industria en aplicaciones en las que no es necesaria una alta precisión en muchos puntos, porque es fácil de construir y de mantener. El número de puntos en la trayectoria se emplea en la síntesis dimensional del eslabonamiento de cuatro barras para establecer entre dos y cinco puntos de acuerdo al verdadero valor del espacio de trabajo.
41
3.1 Análisis de eslabonamiento
A continuación se describen los eslabones del mecanismo de cuatro barras tomando en consideración que la forma de paralelogramo ayuda a transmitir mejor el movimiento al efector final.
A: Eslabón fijo
B: Eslabón transmisor de movimiento
C: Eslabón trasero
D: Eslabón acoplado
42
Cada eslabón se somete a un conjunto de los mismos para conocer una solución cinemática de conjunto de eslabones figura 3.1. Hay métodos para generar éstas soluciones exhaustivamente y para determinar a priori que valor debe tener la cuenta final para cualquier combinación de número de eslabones y grados de libertad.
La conexión de eslabones que constituye cada KLSS (Kinematic link set solution) se ensambla para formar figuras usando juntas de pasador en todos los puntos de conexión de eslabones, estas figuras definen la estructura topológica de los eslabonamientos formados figura 3.2.
3.2 Grados de libertad
El grado de libertad de un mecanismo impone restricciones a la estructura del mecanismo, así utilizando las siguientes ecuaciones para los grados de libertad tenemos:
43
Dónde:
F=número de grados de libertad del mecanismo.
l= número de eslabones del mecanismo (incluido el eslabón fijo: todos los eslabones se consideran como cuerpos rígidos que tienen por lo menos dos juntas).
j= número de juntas del mecanismo, se supone que todas las juntas son binarias, es decir, que conectan dos eslabones); si una junta conecta más de dos eslabones, el número de juntas j=N-1, donde N=el número de eslabones en la articulación común.
fi=grado de libertad de la i-ésima junta; esta es la libertad del movimiento relativo entre los eslabones conectados.
grado de libertad del espacio dentro del cual el mecanismo opera, para el movimiento plano y el movimiento en una superficie el valor es 3, y para movimientos espaciales es igual a 6.
44
3.3 Parámetros básicos
Definiendo las dimensiones de cada eslabón se puede encontrar la relación que existe entre los ángulos que se desplazan figura 3.3.
Por la forma de paralelogramo del mecanismo se puede clasificar como un mecanismo formado por pares inferiores (de rotabilidad), tomando en consideración el criterio de Grashof
Dónde:
45
Se deduce un mecanismo que no tiene movimiento relativo continuo y presenta restricciones, de acuerdo con las barras transmisora y acoplada.
Encontrando los valores de los ángulos , , :
De la ley de cosenos:
Dónde:
A=
B=
C=
46
Realizando las multiplicaciones se tiene:
Si:
Dónde:
= ventaja mecánica.
Resulta una negativa por lo que se tiene una rotación en sentido horario de , la cual es precisa para la acción de movimiento que se requiere realizar.
3.4 Análisis de movimiento
Al momento de diseñar un mecanismo es importante tener en cuenta ciertos criterios, los cuales nos ayudaran a comprobar si el diseño propuesto es el correcto.
3.4.1 Obtención de ecuación de lazo vectorial y ángulos de eslabón.
47
En notación de números polares.
De donde se obtienen los componentes reales e imaginarios
[image:65.612.132.479.81.383.2]