UNIVERSIDAD TÉCNICA PARTICULAR DE LOJA
La Universidad Católica de Loja
ÁREA TÉCNICA
TITULACIÓN DE INGENIERÍA CIVIL
“E
stablecimiento y materialización de una red topográfica de alta precisión en
la UTPL”
TRABAJO DE FIN DE TITULACIÓN
AUTOR
:
Jaramillo Quito, Mercedes Gabriela
DIRECTOR: Zárate Torres, Belizario Amador, M. Sc
ii
APROBACIÓN DEL DIRECTOR DEL TRABAJO DE FIN DE TITULACIÓN
Máster.
Belizario Amador Zárate Torres
DOCENTE DE LA TITULACIÓN
De mi consideración:
El presente trabajo de fin de titulación:
“E
stablecimiento y materialización de una
red topográf
ica de alta precisión en la UTPL”
realizado por Jaramillo Quito
Mercedes Gabriela, ha sido orientado y revisado durante su ejecución, por cuanto se
aprueba la presentación del mismo
Loja, diciembre de 2014
iii
DECLARACIÓN DE AUTORÍA Y CESIÓN DE DERECHOS
“Yo
Mercedes Gabriela Jaramillo Quito
declaro ser autor del presente trabajo de fin
de titulación:
“Establecimiento y materialización de una red topográfica de alta
precisión en la UTPL"
de la Titulación de Ingeniería Civil, siendo Belizario Amador
Zárate Torres director del presente trabajo; y eximo expresamente a la Universidad
Técnica Particular de Loja y a sus representantes legales de posibles reclamos o
acciones legales.
Además certifico que las ideas, conceptos, procedimientos y
resultados vertidos en el presente trabajo investigativo, son de mi exclusiva
responsabilidad.
Adicionalmente declaro conocer y aceptar la disposición del Art. 67 del Estatuto
Orgánico de la Universidad Técnica Particular de Loja que en su parte pertinente
textualmente dice: “Forman parte del patrimonio de la Universid
ad la propiedad
intelectual de investigaciones, trabajos científicos o técnicos y tesis de grado que se
realicen a través, o con el apoyo financiero, académico o institucional (operativo) de
la Universidad”
iv
DEDICATORIA
Primero a Dios porque ha estado conmigo en cada paso que doy, guiándome y dándome fortaleza para continuar. Sin él en mi vida, nada sería posible.
A mis padres, ellos son los pilares fundamentales en mi vida, siempre han velado por mi bienestar, inculcándome principios y valores, apoyándome en todo momento, guiándome con su ejemplo y poniendo toda su confianza en mí. Por todo el amor, entrega y sacrificio que han hecho, es gracias a ellos que he alcanzado este logro.
v
AGRADECIMIENTO
Debo mis agradecimientos a varias personas que directa o indirectamente han contribuido con sus opiniones, correcciones, ánimos, paciencia y compañía.
De manera especial, agradezco al Ing. Belizario Zárate, por la dirección de este trabajo, por depositar su confianza en mí y por toda la paciencia, conocimientos y apoyo que me ha brindado.
Al Ing. Julio González cotutor de este proyecto, por su colaboración y tiempo dedicado, de la misma manera a mis compañeros de gestión productiva, gracias por su ayuda.
vi
ÍNDICE DE CONTENIDOS
APROBACIÓN DEL DIRECTOR DEL TRABAJO DE FIN DE TITULACIÓN ... II DECLARACIÓN DE AUTORÍA Y CESIÓN DE DERECHOS ... III AGRADECIMIENTO ... V ÍNDICE DE CONTENIDOS ... VI ÍNDICE DE FIGURAS ... IX ÍNDICE DE TABLAS ... X
RESUMEN ... 11
ABSTRACT ... 12
1 INTRODUCCIÓN ... 13
1.1 INTRODUCCIÓN... 14
1.2 OBJETIVOS ... 15
1.2.1 Objetivo General ... 15
1.2.2 Objetivos Específicos ... 15
2 MARCO TEÓRICO ... 16
2.1 ASPECTOS BÁSICOS ... 17
2.1.1 Generalidades de la Geodesia ... 17
2.1.2 Redes Geodésicas ... 18
2.2 SISTEMAS DE COORDENADAS Y MARCO DE REFERENCIA TERRESTRE ... 19
2.2.1 Sistema de referencia terrestre geocéntrico convencional ... 20
2.2.2 Sistemas de coordenadas ... 20
2.2.2.1 Coordenadas cartesianas ... 20
2.2.2.2 Coordenadas esféricas ... 21
2.2.2.3 Sistema de coordenadas geográficas ... 22
2.2.2.4 Sistema de coordenadas geodésicas y geocéntricas. ... 23
2.2.2.5 Sistema de coordenadas astronómicas. ... 24
2.2.3 Marcos de referencia ... 25
2.2.3.1 Definición de Datum... 25
2.2.3.2 El World Geodetic System 1984 (WGS84) ... 25
2.2.3.3 Sistema de referencia terrestre Internacional (ITRF) ... 27
2.3 RED GEODÉSICA LOCAL ... 28
2.3.1 Antecedentes ... 28
2.3.2 Red Nacional GPS del Ecuador – RENAGE ... 29
2.3.3 Red GNSS de monitoreo continuo del Ecuador - REGME ... 30
vii
2.4.1 Generalidades sobre los satélites y evolución de las aplicaciones Geodésicas del GPS ... 32
2.4.2 Sistema de Posicionamiento Global GPS ... 33
2.4.3 Señales del GPS ... 37
2.4.4 Determinación de Posiciones del GPS ... 38
2.5 TEORÍA DE ERRORES RELACIONADOS CON OBSERVACIONES TOPOGRÁFICAS ... 38
2.5.1 Error observacional como variable aleatoria ... 38
2.5.2 Medidas redundantes en topografía y su ajuste ... 39
2.6 AJUSTE DE REDES USANDO EL MÉTODO DE LOS MÍNIMOS CUADRADOS ... 39
2.6.1 Condición fundamental de los mínimos cuadrados ... 40
2.6.2 Principio de los mínimos cuadrados... 41
2.6.2.1 Para observaciones de igual precisión ... 41
2.6.2.2 Observaciones de distinta precisión. ... 42
2.6.3 Solución matricial para el ajuste, por medio de ecuaciones de observación, para mediciones de igual precisión. Modelo lineal. ... 43
2.6.4 Solución matricial al ajuste por ecuaciones de observación, para mediciones de distinta precisión. Modelo lineal. ... 45
2.6.5 Ecuaciones no lineales ... 46
2.6.6 Solución matricial al ajuste por ecuaciones de observación para mediciones de igual precisión. Modelo no lineal. ... 48
2.6.7 Solución matricial para el ajuste mediante ecuaciones de observación para mediciones de distinta precisión. Modelo no lineal. ... 49
2.6.8 Ajuste de mínimos cuadrados de los vectores de línea base para el GPS ... 49
2.7 ESTÁNDARES DE PRECISIÓN ... 50
3 METODOLOGÍA ... 51
3.1 INVENTARIO DE LA ANTIGUA RED TIPOGRÁFICA UTPL ... 52
3.2 SELECCIÓN DE LOS SITIOS Y AMOJONAMIENTO ... 52
3.2.1 Reconocimiento de campo y selección de los sitios ... 52
3.2.2 Amojonamiento ... 53
3.3 EQUIPO RECEPTOR ... 55
3.4 FASE DE OBSERVACIÓN CON EL RECEPTOR ... 55
4 RESULTADOS ... 57
4.1 PROCESAMIENTO DE LA INFORMACIÓN ... 58
4.2 COORDENADAS OBTENIDAS ... 58
4.3 COMPARACIÓN DE RESULTADOS CON LOS DE LA ANTIGUA RED ... 62
5 CONCLUSIONES Y RECOMENDACIONES ... 64
ix
ÍNDICE DE FIGURAS
FIGURA 1. MODELO DE REPRESENTACIÓN DE LA TIERRA: GEOIDE, ELIPSOIDE Y
TOPOGRAFÍA ... 17
FIGURA 2. SISTEMA DE COORDENADAS CARTESIANAS ... 21
FIGURA 3: SISTEMA DE COORDENADAS ESFÉRICAS. ... 21
FIGURA 4. SISTEMA DE COORDENADAS GEOGRÁFICAS ... 22
FIGURA 5. COORDENADAS GEODÉSICAS Y GEOCÉNTRICAS ... 23
FIGURA 6. COORDENADAS ASTRONÓMICAS ... 24
FIGURA 7. DEFINICIÓN DE WGS84 ... 26
FIGURA 8. RED ITRF. ... 28
FIGURA 9. RED GNSS DEL ECUADOR ... 31
FIGURA 10. COMPONENTES DEL SISTEMA DE POSICIONAMIENTO GLOBAL ... 34
FIGURA 11. SISTEMA NAVSTAR ... 35
FIGURA 13. ILUSTRACIÓN DEL SEGMENTO DE USUARIO, RECEPTOR Y CONTROLADOR ... 36
FIGURA 14. DISTRIBUCIÓN NORMAL N ... 41
FIGURA 15. PLACA DE ALUMINIO A UTILIZADA PARA LA SEÑALIZACIÓN ... 53
FIGURA 16. PERFORACIÓN DEL TERRENO ... 54
FIGURA 17. COLOCACIÓN DE PEGAMENTO EPÓXICO ... 54
FIGURA 18. PLACA FIJADA EN EL TERRENO ... 54
x
ÍNDICE DE TABLAS
TABLA 1. PRECISIÓN DE ACUERDO AL TIEMPO DE OBSERVACIÓN ... 50
TABLA 2. INVENTARIO DE LA ANTIGUA RED DE CONTROL GEODÉSICO DE LA UTPL ... 52
TABLA 3. ESPECIFICACIONES DE POSICIONAMIENTO DEL EQUIPO ... 55
TABLA 4. RESULTADOS OBTENIDOS EN CADA PUNTO ... 58
TABLA 5. COORDENADAS DE LA ANTIGUA RED UTPL ... 62
TABLA 6. COORDENADAS DE LA ESTACIÓN IGM ... 62
TABLA 7. COMPARACIÓN DE RESULTADOS: ANTIGUA Y NUEVA RED ... 63
TABLA 8. RESEÑA TOPOGRÁFICA: ESTACIÓN 1 ... 71
TABLA 9. RESEÑA TOPOGRÁFICA: ESTACIÓN 2 ... 72
TABLA 10. RESEÑA TOPOGRÁFICA: ESTACIÓN 3 ... 73
TABLA 11. RESEÑA TOPOGRÁFICA: PUNTO 4 ... 74
TABLA 12. RESEÑA TOPOGRÁFICA: PUNTO 5 ... 75
11 RESUMEN
Las Redes Geodésicas se ocupan de la materialización de sistemas de referencia en el Tierra y contribuyen como base para múltiples trabajos en el área civil.
La materialización del Sistema de Coordenadas en el terreno, es el Marco de Referencia y se encuentra conformado por una serie de puntos materializados, cuyas posiciones (coordenadas tridimensionales) son conocidas.
Este Proyecto tiene como objetivo, establecer una red topográfica en el campus UTPL con la mayor precisión posible, la que servirá como red de apoyo para posteriores trabajos de investigación así como para la ejecución de trabajos topográficos que se realicen en el campus universitario.
12 ABSTRACT
Las Redes Geodésicas se ocupan de la materialización de sistemas de referencia en el Tierra y contribuyen como base para múltiples trabajos en el campo civil.
La materialización del Sistema de Coordenadas en el terreno, es el Marco de Referencia y se encuentra conformado por una serie de puntos materializados, cuyas posiciones (coordenadas tridimensionales) son conocidas.
Este Proyecto tiene como objetivo, establecer una red topográfica en el campus UTPL con la mayor precisión posible, la que servirá como red de apoyo para posteriores trabajos de investigación así como para la ejecución de trabajos topográficos que se realicen en el campus universitario.
13
14 1.1 Introducción
La Universidad Técnica Particular de Loja, siendo uno de los destacados centros universitarios en el Ecuador, no contaba con una red topográfica funcional fijada mediante tecnologías GPS (Sistema de Posicionamiento Global), siendo este un importante recurso para satisfacer trabajos o proyectos que se ejecuten en el campus. Es por esta razón que este proyecto establece una red georreferenciada como una necesidad para la UTPL.
Este trabajo permite disponer de diversas bases topográficas establecidas y determinadas con gran precisión, y así lograr tener un marco de referencia fiable y oficial de los trabajos realizados en la cartografía de la UTPL, optimizando las pruebas posteriores que pudieran realizarse, ya que las bases de partida estarán medidas, calculadas y debidamente compensadas.
EL uso de la tecnología GPS, es aprovechado para el establecimiento del Marco de Referencia Terrestre Internacional (ITRF), cuya principal aplicación es unificar las referencias geométricas de los países a escala global con una exactitud centimétrica.
Por estos motivos, este proyecto consiste en la materialización de una red de bases topográficas ubicadas en diferentes sitios del campus UTPL.
Las mediciones respectivas se realizaron mediante el uso de un equipo GPS de doble frecuencia, siendo las sesiones de observación debidamente planificadas a fin de cumplir con las normas y especificaciones técnicas, lo cual servirá para el desarrollo de proyectos comprometidos con la generación y utilización de información cartográfica del campus universitario.
La Red Topográfica, proporcionará el control básico esencial para el desarrollo de proyectos de Ingeniería, Catastro, Cartografía, proyectos Forestales, Educativos, Demarcación de límites territoriales, Proyectos Científicos, entre otros.
15 1.2 Objetivos
1.2.1 Objetivo General
Establecer y materializar una red topográfica de alta precisión en la UTPL 1.2.2 Objetivos Específicos
Realizar el inventario de la red actual de referencia topográfica.
Establecer y materializar la nueva red topográfica en el campus de la UTPL.
Determinar las coordenadas de los puntos materializados mediante post-procesamiento de datos.
16
17 2.1 Aspectos básicos
2.1.1 Generalidades de la Geodesia
La Geodesia es una ciencia que tiene como objetivo el estudio de la tierra, determinación de su forma y dimensiones, su campo de gravedad, y sus variaciones en el tiempo; siendo un apartado esencial e importante, la determinación de posiciones de puntos de su superficie. Esta ciencia posee fundamentos fisicomatemáticos y aplicaciones en: topografía, cartografía, fotogrametría, navegación e ingenierías de todo tipo, además está vinculada a la astronomía y la geofísica.
El proceso de determinación de posiciones geodésicas, se encuentra ligado a la forma y dimensiones de la tierra, por esta razón, la determinación de la figura de la tierra tiene una proyección práctica en lo que se refiere al cálculo de coordenadas y solución de problemas geométricos sobre su superficie.
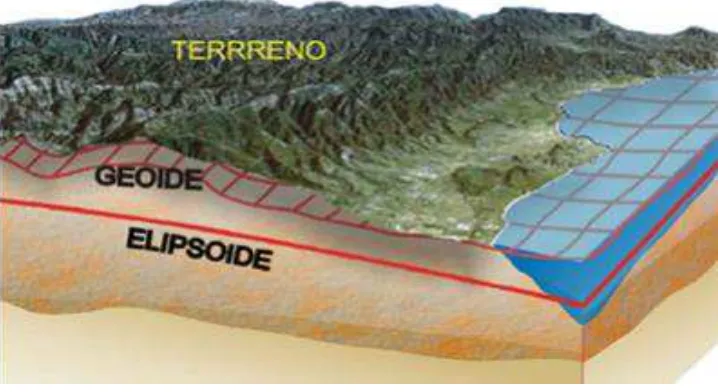
[image:17.595.151.510.441.637.2]La figura "natural" de la Tierra, excluyendo la topografía o forma externa, se asemeja a la definición de geoide, definida como una superficie de nivel equipotencial del campo gravitatorio terrestre.
Figura 1. Modelo de representación de la tierra: geoide, elipsoide y topografía
Fuente: http://www.inegi.org.mx/geo/contenidos/Geodesia/img/gds_geoide.jpg
18
Determinar el geoide es uno de los principales objetivos de la geodesia, además estudia las mareas terrestres, las acciones atractivas del sol y la luna sobre la tierra. Otra finalidad práctica de la geodesia, se la llama geodesia regional o utilitaria, en la que proporciona la infraestructura geométrica necesaria y realiza mediciones de distancias, ángulos, altitudes, coordenadas, observaciones a satélites, entre otros.
La teoría de redes geodésicas estudia la formulación matemática de las mismas, estas y otras necesidades civiles llevan a la creación de métodos precisos y se utilicen las técnicas clásicas así como los modernos satélites artificiales.
Desde el punto de vista práctico, la Geodesia se puede dividir en: Geodesia global, Geodesia regional y Topografía.
Como ya se mencionó anteriormente, la Geodesia global, se encarga de la determinación de la forma y tamaño de la tierra, su orientación en el espacio y su campo gravitatorio externo, para lo cual se establecen redes geodésicas globales.
La Geodesia regional, es aquella en la que se realizan todas las actividades relacionadas con la determinación de coordenadas y del campo gravitatorio en una región, lo que da paso a las redes nacionales y continentales.
En cuanto a los levantamientos topográficos, que es la parte de la Geodesia que se aplica en este proyecto, se determinan las coordenadas de puntos a partir de las redes nacionales, prescindiendo del campo gravitatorio.
2.1.2 Redes Geodésicas
“Una red geodésica en un conjunto de puntos perfectamente localizados en el terreno mediante señales adecuadas, entre los que se han efectuado observaciones de tipo geodésico, con el fin primordial de obtener las coordenadas, su precisión y fiabilidad en términos relativos y absolutos, respecto de un sistema de referencia establecido de antemano”
(Ferrer Torío R. 1991).
19
Las Redes georreferenciadas constituyen los cimientos de una gran cantidad de disciplinas tanto científicas como técnicas. Son fundamentales para el planteamiento, diseño y ejecución de cualquier tipo de infraestructura.
Hoy en día, la Geodesia ha superado en gran cantidad su base geométrica inicial y se desenvuelve en un marco de ambientes físicos-dinámicos fundamentales, y ha pasado del plano bidimensional al tridimensional gracias a los avances tecnológicos de nuestra época, con nuevos equipos de medición y análisis, lo que nos permite obtener resultados de gran exactitud.
Actualmente las técnicas de medición se desarrollan en un ámbito dinámico espacial que provee resultados muy precisos en lapsos pequeños en comparación a los métodos tradicionales, particularmente el Sistema de Posicionamiento Global (G.P.S), que ha servido logrado grandes cambios en lo que respecta a la medición geodésica, reemplazando así y con gran ventaja a los métodos de posicionamiento astronómico, triangulación, poligonáceo y Doppler, aplicados hasta la actualidad para determinación de posiciones.
Las redes geodésicas pueden ser: planimétricas, altimétricas o tridimensionales (Aguilera Ureña, 2001)
Redes planimétricas: tienen como objetivo establecer coordenadas, latitud y longitud (x, y). Las redes planimétricas son las de Primer Orden o Fundamentales, con lados entre 30 y 40 km, dependiendo de la orografía del terreno.
Redes altimétricas: su fin primordial, es determinar la tercera coordenada, la altura sobre la superficie del geoide. Estas redes son las redes de nivelación de alta precisión de primer orden, que son totalmente independientes de las planimétricas, tanto en ubicación, señalización y métodos de observación.
Redes tridimensionales: la planimetría y altimetría se determinan de manera conjunta. 2.2 Sistemas de Coordenadas y Marco de Referencia Terrestre
Primeramente es importante establecer la diferencia existente entre sistema de referencia, marco de referencia y sistema de coordenadas.
20
EL marco de referencia tiene por objetivo, la materialización de un sistema de referencia en el espacio mediante observaciones instrumentales, es decir, un grupo de puntos localizados en la superficie terrestre, con coordenadas conocidas.
Un sistema de coordenadas es aquel que determina los parámetros de las coordenadas de los puntos que conforman el marco de referencia.
2.2.1 Sistema de referencia terrestre geocéntrico convencional
Este sistema, es el que utiliza ejes de coordenadas fijos sobre la Tierra, es decir, que giren con ella, de forma que las coordenadas de un punto siempre serán las mismas.
Los componentes del sistema de referencia a convencional son (Furones, 2011):
Origen: Centro de masas terrestres o geocentro, incluyendo la atmósfera y los océanos.
Eje Z: coincide con el eje de rotación terrestre.
Plano meridiano: pasa por cualquier punto de la tierra y contiene al eje de rotación.
Plano ecuador: es perpendicular al eje de rotación y pasa por el geocentro.
Eje X: se sitúa en la dirección del plano meridiano que pasa por Greenwich y contenido en el plano ecuador.
Eje Y: contenido en el plano ecuador y perpendicular al eje X y su sentido será tal que los tres ejes formen una tripleta en el sentido de las agujas del reloj.
2.2.2 Sistemas de coordenadas
2.2.2.1 Coordenadas cartesianas
21
Figura 2. Sistema de coordenadas cartesianas
Fuente: (Furones, 2011)
2.2.2.2 Coordenadas esféricas
En este sistema, un punto se especifica como la intersección de las tres superficies (r,φ, ). El uso de coordenadas esféricas usualmente utilizado para establecer los parámetros de puntos sobre la Tierra. En la Figura 3, se puede observar sus componentes, en donde r es la distancia radial al geocentro, φ la latitud geocéntrica (ángulo entre r y el plano del ecuador) y la longitud geocéntrica (ángulo entre el plano meridano de Greenwich y el del punto de cálculo, medido en el plano del ecuador).
Figura 3: Sistema de coordenadas esféricas.
[image:21.595.182.405.471.670.2]22
Lo que define la relación entre las coordenadas esféricas y cartesianas, es el producto de matrices correspondiente a la parametrización regular de la esfera:
( ) = ( 𝜆𝜑 𝜑𝜆
𝜑 )
2.2.2.3 Sistema de coordenadas geográficas
En este sistema, se emplea una superficie esférica de tres dimensiones para establecer posiciones en la Tierra. Suele llamarse con frecuencia “datum” a estos sistemas, pero esto es incorrecto, pues un datum es solo una parte de un sistema de coordenadas geográficas. El sistema incluye una unidad angular de medida, un meridiano base y un datum (basado en un esferoide).
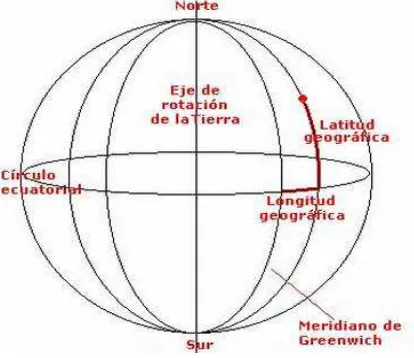
[image:22.595.208.415.516.695.2]Utilizando los valores de latitud y longitud, se hace referencia a un punto. La longitud y la latitud son ángulos medidos desde el centro de la Tierra hasta un punto de la superficie de la Tierra. Los ángulos se suelen medir en grados decimales o en grados, minutos y segundos. Los valores de latitud se miden respecto al ecuador y van desde -90° en el polo sur hasta +90° en el polo norte, por otro lado, los valores de longitud se miden respecto al meridiano base, estos van de -180° cuando se viaja hacia el oeste hasta 180° cuando se viaja hacia el este. Si el meridiano base está en Greenwich, Australia, que está al sur del ecuador y al este de Greenwich, tiene valores de longitud positivos y valores de latitud negativos.
Figura 4. Sistema de coordenadas geográficas
23
2.2.2.4 Sistema de coordenadas geodésicas y geocéntricas.
Teniendo en cuenta que en una aproximación de la Tierra, ésta es un elipsoide de revolución definido por su semieje mayor y su semieje menor o aplanamiento. El punto céntrico del elipsoide coincide con el centro del sistema de referencia o geo centro y el semieje menor coincide con el eje de rotación terrestre, de esta manera queda constituido el sistema de coordenadas geodésico.
En un punto de la superficie del elipsoide, la vertical geodésica coincide con la dirección del vector normal al elipsoide en dicho punto, entonces, no pasa por el centro del elipsoide. Así las coordenadas Geodésicas serán (Furones, 2011):
Latitud geodésica: es el ángulo que forma la vertical geodésica del punto con el plano ecuador geodésico.
Longitud geodésica: es el ángulo formado por el meridiano geodésico del punto de cálculo y el meridiano geodésico origen.
AL introducir las coordenadas geocéntricas sobre el elipsoide, estas no coincidirán con las geodésicas, en este caso la longitud geocéntrica igual que la longitud geodésica, pero la latitud
[image:23.595.154.461.493.674.2]geocéntrica (β), será el ángulo entre la línea que une el centro del elipsoide y un punto sobre el elipsoide y el ecuador geodésico. Figura 5.
Figura 5. Coordenadas Geodésicas y Geocéntricas
24 2.2.2.5 Sistema de coordenadas astronómicas.
Las observaciones astronómicas, tanto geodésicas como topográficas, se realizan sobre la superficie real de la tierra, en un momento determinado, de esta manera, el concepto de figura y forma de la tierra, pasan a la definición de geoide.
[image:24.595.166.461.292.565.2]Como ya se ha dicho anteriormente, geoide se define como la superficie equipotencial respecto a la gravedad y normal a su dirección, siendo la normal, la de fuerza de gravedad que será la que sigue un rayo óptico de un instrumento topográfico cuando se estaciona, o la línea de la plomada. Debido a la forma achatada de los polos en la Tierra, y a la distribución no homogénea de masas en el interior, esta línea no coincidirá con la vertical geográfica ni con la geodésica o la geocéntrica. En la Figura 6, se puede apreciar esta descripción.
Figura 6. Coordenadas astronómicas
Fuente: (Furones, 2011)
Entonces, dado un punto P de la superficie topográfica, se denomina vertical astronómica instantánea de P, a la recta tangente en P a la línea de la plomada en ese punto.
Ahora, se define como plano ecuador astronómico instantáneo, al plano perpendicular al eje instantáneo de rotación que pasa por el centro de masas de la Tierra.
Se denomina plano meridiano astronómico instantáneo de P, al plano que contiene la vertical astronómica de P y al eje instantáneo de rotación terrestre.
25
Latitud astronómica de P es el ángulo F que forma la vertical astronómica de P, con el plano del ecuador astronómico instantáneo. Varía de 0o a 90º en el hemisferio
astronómico norte y de 0o a - 90º en el hemisferio astronómico sur.
Longitud astronómica de P, es el ángulo D, que forma el plano meridiano astronómico instantáneo de P con el plano meridiano astronómico instantáneo tomado como origen (Greenwich). Se considera de 0o a 365º.
2.2.3 Marcos de referencia
2.2.3.1 Definición de Datum
Se define como datum, a un conjunto de parámetros que determinan la superficie de referencia o el sistema de coordenadas de referencia utilizado para el cálculo de coordenadas de puntos sobre la tierra. En otras palabras, son los parámetros que establecen el origen teórico para las coordenadas terrestres: latitud y longitud.
Los datum horizontales son utilizados para describir un punto sobre la superficie terrestre y los datum verticales miden elevaciones o profundidades.
Si los datum son diferentes, tienen diferentes radios y puntos centrales, entonces, si un punto es medido con diferentes datum puede tener diferentes coordenadas.
Existen varios datum de referencia, los más comunes en las diferentes zonas geográficas son los siguientes:
América del Norte: NAD27, NAD83 y WGS84
Argentina: Campo Inchauspe
Brasil: SAD 69/IBGE
Sudamérica: SAD 56 y WGS84
España: ED50, desde el 2007 el ETRS89 en toda Europa.
2.2.3.2 El World Geodetic System 1984 (WGS84)
26
El WGS-84, lleva utilizándose desde el año 1987 y es un sistema de referencia terrestre único para referenciar las posiciones y vectores. Permite localizar cualquier punto de la Tierra sin necesitar otro de referencia, por medio de tres unidades dadas.
Este sistema se determinó realizando observaciones Doppler al sistema de satélites de navegación NNSS o Transit, de tal forma que se adaptara lo mejor posible a toda la Tierra. Las coordenadas que se obtienen de la constelación de satélites, pueden ser cartesianas en el espacio respecto al centro de masas de la Tierra (X,Y,Z) o geodésicas (λ,ω,h). El sistema de referencia tiene las siguientes características:
Origen: Centro de masas de la tierra
Eje Z: paralelo al polo medio
Eje X: Intersección del meridiano de Greenwich y el plano del ecuador
[image:26.595.120.502.361.554.2] Eje Y: Perpendicular a los ejes Z y X coincidente con ellos en el Centro de Masas terrestre
Figura 7. Definición de WGS84
Fuente: National Imagery and Mapping Agency
Los parámetros fundamentales del elipsoide de referencia son los siguientes (DMA, 1991):
Semieje mayor: a = 6378137 m
Aplanamiento: f = 0.00335281066474
27
2.2.3.3 Sistema de referencia terrestre Internacional (ITRF)
Este sistema fue establecido por el Servicio Internacional de Rotación Terrestre (IERS) en el año 1988. Cuenta con una red conformada por más de 200 estaciones definidas con una precisión absoluta de ± 1/3 cm.
Este sistema se materializa a través de las coordenadas de una serie de estaciones distribuidas por todo el mundo, constituyendo el ITRF (Internacional Terrestrial Reference Frame).
El ITRF se define como geocéntrico, su escala base la constituye el metro (en el sistema internacional y con orientación de sus ejes como ha establecido la BIH (Bureau International
de L’Heure) en 1984:
Eje Z: Polo medio determinado por la IERS y llamado IERS Reference Pole (IRP) o Convencional Terrestrial Pole (CTP).
Eje X: Meridiano de Greenwich Convencional determinado por la IERS y llamado IERS Reference Meridian (IRM) o Greenwich Mean Origin (GMO).
Eje Y: Formando una tripleta en el sentido de las ajugas del reloj, con los ejes X y Z sobre el plano del ecuador convencional.
El ITRF tuvo sus inicios en 1984 y a partir de ese momento se han obtenido soluciones que difieren unas de otras debido a la incorporación constante de nuevas estaciones, nuevas observaciones en las ya existentes, mejorando la precisión de las mismas o actualizando los métodos de procesamiento.
Actualmente, la Geodesia se sirve de un marco de referencia constituido por las coordenadas de las estaciones que utilizan técnicas de posicionamiento muy preciso (VLBI, SLR, GPS, DORIS). Este marco de referencia ITRF, es tan preciso que permite medir los movimientos tectónicos con errores de unos pocos milímetros por año (Perdomo, 2013).
Cada técnica de observación (VLBI, LLR, SLR, GPS o DORIS) genera su propio marco de referencia con coordenadas y velocidades conocidas para cada estación en cada época de observación, debido a esto, las soluciones técnicas deben combinarse para estimar las velocidades y posiciones en el marco ITRF.
28
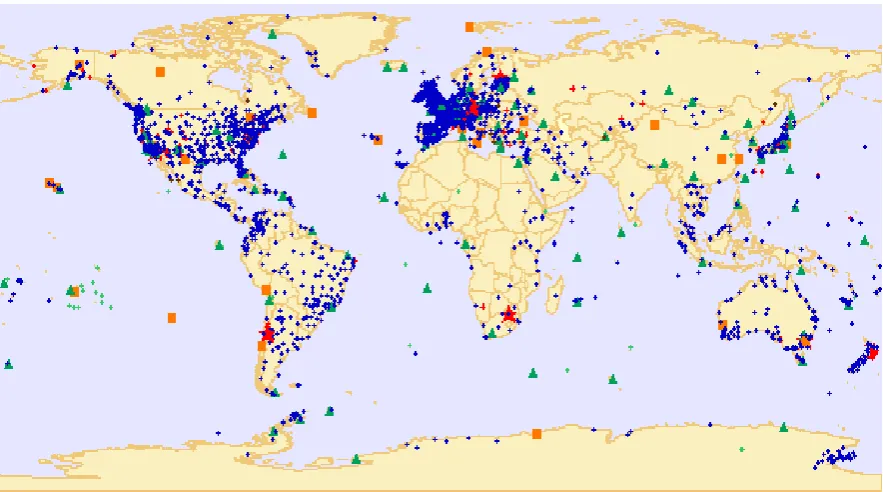
[image:28.595.88.530.107.353.2]En la Figura 8 se puede observar la red ITRF
Figura 8. Red ITRF.
Fuente: (ITRF, 2013)
2.3 Red Geodésica Local
2.3.1 Antecedentes
Durante el transcurso del tiempo, la prioridad de establecer y adoptar un Dátum Horizontal permanente para una nación y un continente, siempre ha sido un objetivo principal desarrollado por parte de las Agencias Cartográficas Nacionales.
Organismos internacionales de América Latina, con el propósito de tener una idea más exacta del Territorio y preservar las riquezas y recursos existentes, se pusieron como meta la obtención de una Cartografía de mayor precisión de la que poseían.
En Ecuador, en el año 1928, crea el SERVICIO GEOGRÁFICO MILITAR, el cual inicia los trabajos cartográficos a nivel nacional, tomando como base de partida el vértice de Riobamba, el que formaba parte de la Red triangular medida por la Misión Francesa en 1906.
29
A finales de la década de 1960, la ejecución de las campañas de campo dan paso a la Red Geodésica de Primer Orden, cuya Referencia Geodésica Nacional era el Datum Provisional de 1956 para América del Sur. De esta manera se adopta el PSAD56, como Datum oficial del Ecuador, a partir del 6 de agosto de 1960.
Aquellos procesos convencionales de medición fueron compatibles en el pasado a través del uso de Sistemas de Referencia Locales; pero gracias al avance tecnológico y científico, se experimentó una gran evolución con la llegada del Sistema de Posicionamiento Global (GPS, a partir de 1980) y sus técnicas de medición.
En 1993 en Asunción, Paraguay; se comienza con el Sistema de Referencia Geocéntrico para las Américas SIRGAS, cuyo principal objetivo es homogeneizar el sistema de referencia oficial en toda América.
Nuestro país Ecuador, en común acuerdo con los demás países de Sudámerica, conforma el proyecto SIRGAS desde el año 1993, con el propósito de establecer la Red Nacional GPS, enlazada al Sistema de Referencia Terrestre Internacional ITRS, respaldado técnicamente por el Sistema de Rotación Terrestre Internacional IERS, lo que garantiza una actualización constante del Marco de Referencia Geodésico Nacional
Las actividades de SIRGAS a nivel nacional, inician en 1994 con la medición de tres puntos principales (Galápagos, Latacunga y Zamora); y concomitante a esto, se desarrolla la materialización de la Red Nacional GPS del Ecuador – RENAGE. La RENAGE es una red pasiva compuesta por 135 mojones de concreto distribuidos a nivel nacional, cuyas campañas de observación GPS se desarrollaron entre los años 1994, 1996 y 1998.
2.3.2 Red Nacional GPS del Ecuador – RENAGE
"La RENAGE, es el Marco Geocéntrico de Referencia Nacional materializado a través de estaciones Pasivas y el sustento técnico por el cual el Ecuador atravesó el umbral de la Geodesia Convencional a la era de los Sistemas Satelitales de Navegación Global". (Cisneros, 2012).
30
2.3.3 Red GNSS de monitoreo continuo del Ecuador - REGME
El Instituto Geográfico Militar, realiza sus actividades con el objetivo de mantener un Marco Geodésico de Referencia Nacional actualizado y acorde con las técnicas de posicionamiento disponibles en la actualidad, como son los sistemas satelitales de navegación global: GPS, GLONASS y en un futuro cercano GALILEO. Para lograr este propósito es necesario la instalación de una gran infraestructura física y técnica que permita la observación y disponibilidad de información GNSS en tiempo real, proporcionando así una plataforma nacional de georreferencia precisa, ágil y oportuna, la misma que llegue a satisfacer las necesidades de los usuarios de la comunidad GNSS nacional e internacional.
Toda esta infraestructura técnica, depende fundamentalmente de la disponibilidad de equipos geodésicos de última generación (como son las estaciones GNSS permanentes), canales de comunicación / transmisión de datos, políticas de seguridad e integridad; además de los protocolos de entrega y difusión de la información para el uso, provecho y desarrollo del país, en lo que respecta a ciencias de la Tierra.
Todos estos componentes, constituyen una gran infraestructura geoespacial denominada RED GNSS DE MONITOREO CONTINUO DEL ECUADOR – REGME, instalada y administrada por el IGM a nivel nacional.
Las estaciones permanentes se encuentran enlazadas a la Red Nacional GPS del Ecuador (RENAGE) y distribuidas a lo largo y ancho del territorio nacional. Estas captan datos GNSS (GPS+GLONASS) las 24 horas del día, los 7 días a la semana y los 365 días del año, proporcionando información necesaria para realizar el procesamiento diferencial de información GNSS.
31 Figura 9. Red GNSS del Ecuador
Fuente: (GeoPortal del Instituto Geográfico Militar-Ecuador, s.f.)
32
2.4 El Sistema de Posicionamiento Global GPS y sus aplicaciones en redes georreferenciadas
2.4.1 Generalidades sobre los satélites y evolución de las aplicaciones Geodésicas del GPS
El primero satélite lanzado por el hombre al espacio fue el SPUTNIK-1 en 1957, este marcó la utilización del espacio con los fines de: Teledetección, Satélites de Navegación y Comunicaciones, con espacios que van desde los 150 Km a los 36.000 Km.
La Fuerza Naval Americana y la Soviética introdujeron los sistemas TRANSIT y ZIKADE, respectivamente, los primeros sistemas de navegación, ambos con un orbitaje de 1000 Km. En esta época existía la necesidad de varias pasadas de los satélites para alcanzar una precisión elevada.
El sistema GLONASS de los soviéticos y el sistema NAVSTAR – GPS de los americanos lograban márgenes de precisión mucho más elevados en relación con sus predecesores. El orbitaje de 20.000 Km les permitía cubrir sobre el 30-35% de la superficie de la Tierra. En 1982 se realizan mediciones con el prototipo de GPS Macrometer revelando precisiones del orden de 1 a 2 ppm. Comenzaba el uso civil del GPS.
EL uso de este instrumento, se volvió aún más trascendental al ser capaz de reemplazar sistemas como el VLBI (Very Long Baseline Interferometry) o el SLR (Satellite Laser Ranging), que eran sistemas de medición de grandes distancias.
Posteriormente en Ottawa 1983 se utiliza el GPS para pequeñas redes geodésicas sobre los 50 Km de línea base y para grandes redes en el oeste de Canadá cerrando un triángulo con líneas base de 291, 471 y 544 Km.
Las aplicaciones en el campo de la georreferenciación con GPS ha indo aumentando, y a la vez el sistema ha ido mejorando en la velocidad y precisión en la determinación de la posición, aparte de esto la tecnología del receptor, tecnología de la antena y algoritmos de cálculo han visto el mismo cambio positivo.
33
El National Geodetic Survey, el Departamento de Transportes del Estado de Nueva York (NYSDoT) o el Instituto Geográfico Nacional en España son ejemplos de organizaciones que utilizan el GPS para obras de uso civil como el trazado de carreteras, control de la ejecución, control de mapas topográficos.
El GPS sustituye también a los trabajos geodésicos de precisión en el control de obras en donde son requeridas precisiones de 1 mm a 1 cm en distancias de pocos kilómetros.
La aplicación del GPS en altimetría ha presentado una seria incertidumbre debido a la diferencia que la planimetría presenta sobre esta.
Los primeros trabajos que se realizaron con aplicaciones de la técnica relativa para el GPS fueron para el cálculo de elevaciones a lo largo del rio Mississippi, con buenos resultados, a pesar de las prestaciones que ofrecía el cálculo a partir de nivelación.
Claramente se puede ver que el GPS es y seguirá siendo una solución efectiva ante muchos proyectos en los que intervenga la georreferenciación, pero al mismo tiempo seguirá siendo un motivo de investigación y mejoramiento ya que toda nueva herramienta necesita ser probada y perfeccionada, así como también es posible que de problemas
2.4.2 Sistema de Posicionamiento Global GPS
Como se ha mencionado, para la realización de levantamientos de alta precisión geodésico-topográficos es necesario utilizar equipos de medición con la tecnología más avanzada, tales como el GPS, con el cual es posible determinar las coordenadas que permiten ubicar puntos sobre la superficie de la Tierra.
El Sistema de Posicionamiento Global, es un Sistema de Navegación por Satélite que permite determinar la posición de un objeto, en cualquier parte del mundo, con una precisión tan alta que puede llegar hasta los centímetros, si bien lo habitual son unos pocos metros. El sistema fue desarrollado, instalado y operado por el Departamento de Defensa de los Estados Unidos, que suministra información sobre la posición y la velocidad de los objetos que lo usan 24 horas al día y con cobertura en todo el mundo, y consta de 24 satélites artificiales (21 regulares más 3 de respaldo) y sus respectivas estaciones en tierra.
34
En el campo de la Ingeniería Civil, el GPS se ha convertido en una herramienta fundamental para la determinación de posiciones y realización de levantamientos topográficos con rapidez y precisión
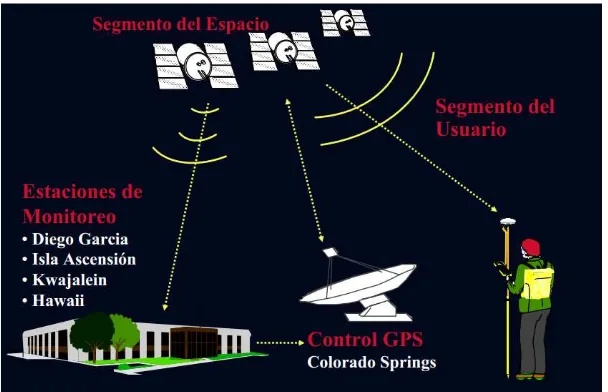
[image:34.595.161.465.191.387.2]El GPS está integrado por tres segmentos o componentes de un sistema, que se puede apreciar en la siguiente ilustración:
Figura 10. Componentes del Sistema de Posicionamiento Global
Fuente: (Introducción al Sistema de Posicionamiento Global, s.f.)
Cada segmento se describe a continuación: a). Segmento espacial
Lo forman el conjunto de satélites en órbita con las siguientes características:
Órbitas cuasi circulares de 26000km de radio.
6 planos orbitales con 4 satélites por plano.
El grado de inclinación respecto al ecuador es de 55º.
Su longitud de separación es de 60º.
El periodo orbital de medio día sideral es de 11h 58min.
35
Tres relojes atómicos, uno de Cesio y dos de Rubidio, lo que aumenta su fiabilidad y operatividad.
Sistema de paneles solares.
Conjunto de antenas para la emisión de señales GPS, la comunicación con las estaciones de tierra, y para la comunicación entre satélites.
[image:35.595.233.425.259.449.2] Un sistema de navegación autónomo (AutoNav), que les permite mantener su órbita y su reloj interno durante 180 días.
Figura 11. Sistema NAVSTAR
Fuente: (UStady, s.f.)
b). Segmento de Control
El responsable de este segmento es la fuerza aérea norteamericana (USAF), la cual se encarga de:
Planificar el sistema y lanzar nuevos satélites.
Realizar tareas de mantenimiento.
Medir las posiciones de los satélites y predecir sus órbitas.
Medir y ajustar los relojes atómicos.
Analizar las señales emitidas.
36
[image:36.595.87.552.165.363.2]Los satélites son seguidos desde cinco estaciones terrestres repartidas por todo el mundo: La Isla Ascensión, Diego García, Kwajalein, Hawaii y Colorado. Desde las tres primeras estaciones además del seguimiento, pueden también enviarse a los satélites, los datos que deben emitirse. Estas estaciones pueden apreciarse en la Figura 12.
Figura 12. Estaciones seguidas por el Sistema de Posicionamiento Global
Fuente: Earthmap: NASA, obtenido de: http://visibleearth.nasa.gov/
c). Segmento de usuario
Conformado por la antena de recepción y por el receptor/microprocesador GPS que se encarga de realizar los cálculos a partir de los mensajes de navegación recibidos de los satélites.
Figura 13. Ilustración del Segmento de usuario, receptor y controlador
[image:36.595.195.430.501.713.2]37 Sus funciones principales son las siguientes:
Captar las señales emitidas por los satélites
Decodificar los mensajes de navegación
Medir el retardo de la señal (desde el transmisor hasta el receptor) a partir de los cuales calculan la posición.
Presentar la información de la posición en la que se encuentra (en 3D o en 2D)
Ayuda a la navegación.
Almacenamiento de datos.
Prestaciones de los receptores civiles (c/A)
1ª posición 2D en menos de 2 minutos
1ª posición 3D en menos de 2.5 minutos
Actualizaciones de la posición de 0.5 a 1 segundos.
Precisión en torno a 15m.
Medida de la velocidad del usuario, precisión de 0.1m/s aproximadamente.
Referencia temporal, precisión de 100ns aproximadamente.
Estructura general del equipo de usuario
Diagrama de bloques del receptor GPS 2.4.3 Señales del GPS
38 2.4.4 Determinación de Posiciones del GPS
Las posiciones se obtienen mediante la determinación de las distancias a los satélites visibles. Este proceso se conoce como "trilateración". El momento de la transmisión de la señal en el satélite se compara con el momento de la recepción en el receptor. La diferencia de estos dos tiempos nos dice cuánto tiempo tomó para que la señal viajara desde el satélite al receptor. Si se multiplica el tiempo de viaje por la velocidad de la luz, podemos obtener el rango, o de distancia, con el satélite. La repetición del proceso desde tres satélites permite determinar una posición de dos dimensiones en la Tierra (es decir, la longitud y latitud). Un cuarto satélite es necesario para determinar la tercera dimensión, es decir la altura. Cuantos más satélites son visibles, más precisa es la posición del punto a determinar. Las órbitas de los satélites GPS están inclinadas respecto al ecuador de la Tierra en alrededor de 55°. La distribución espacial de la constelación de satélites permite al usuario disponer de 5 a 8 satélites visibles en cualquier momento. El sistema está diseñado para asegurar que al menos cuatro satélites estarán visibles con una recepción configurada de la señal de 15 ° sobre el horizonte en un momento dado, en cualquier parte del mundo.
Aunque el GPS puede dar posiciones muy precisas, aún hay fuentes de error. Estos incluyen los errores del reloj, los retrasos atmosféricos, sin saber exactamente dónde están los satélites en sus órbitas, las señales que se refleja de los objetos en la superficie de la Tierra, e incluso la degradación intencionada de la señal del satélite
2.5 Teoría de errores relacionados con observaciones topográficas
2.5.1 Error observacional como variable aleatoria
Las mediciones u observaciones, están sujetas a variaciones, las mismas que pueden ocurrir si es que no se considera alguno de los procesos operatorios que implica la medición.
39
Tomando como base la experiencia y el análisis de la gran cantidad de mediciones topográficas, se ha constatado que los errores aleatorios presentan características estadísticas que se pueden llegar a comprender.
Si un grupo de errores se produce bajo las mismas condiciones de medición, se ha observado que la media aritmética entre estos tiende a 0 cuando el número de observaciones tiende a infinito, además los errores positivos y negativos de la misma magnitud aparecen aproximadamente con la misma frecuencia.
Los errores de pequeña magnitud son más frecuentes que los de mayor magnitud, y bajo condiciones específicas de medición, la magnitud absoluta de los errores se mantiene dentro de unos límites.
2.5.2 Medidas redundantes en topografía y su ajuste
Para disminuir errores en las mediciones, principalmente en coordenadas cartesianas, es necesario optimizar las condiciones del proceso de observación, para ello es recomendable realizar el mayor número de mediciones necesarias para determinar unívocamente los parámetros topográficos necesarios. De esta manera se puede descubrir la existencia de errores y aumentar la precisión y fiabilidad de los resultados.
Si ocurre que existen errores en las mediciones y redundancia en las mismas, se producirá
inconsistencia o contradicción entre las medidas, lo que en topografía se conoce como “error de cierre”. Uno de los propósitos más importantes en los cálculos topográficos, es eliminar
estas inconsistencias entre las medidas, con criterios de estimación tal como el principio de los mínimos cuadrados. Estos criterios deben estar basados en las propiedades de los errores de las mediciones.
“El proceso por el cual se eliminan las inconsistencias entre las medidas y se obtienen los
mejores resultados posibles a partir de los datos disponibles de denomina ajuste”. (Abellán García, María, 2013)
2.6 Ajuste de Redes usando el método de los “Mínimos Cuadrados”
Posterior a la eliminación de errores sistemáticos, en topografía se presentan otros errores de cierre, y para corregirlos, se realizan ajustes para producir matemáticamente las condiciones geométricas perfectas.
40
Este método se usa para ajustar todo tipo de mediciones topográficas, y es esencial para el ajuste de las observaciones con el GPS, cabe mencionar también su amplio uso en el ajuste de datos fotogramétricos.
Los estándares más precisos de medición en topografía, incluyen el uso de cantidades estadísticas que resultan del ajuste con mínimos cuadrados, entonces para evaluar que cualquier levantamiento cumpla con dichos estándares, debe realizarse un ajuste con mínimos cuadrados.
Debido a que este método se basa en la teoría matemática de la probabilidad, es el más riguroso en comparación a otros métodos de ajuste, y cada observación puede ponderarse de acuerdo a su precisión estimada.
Los mínimos cuadrados permiten que se hagan análisis rigurosos de los resultados del ajuste, de esta manera se puede calcular la precisión de todas las cantidades ajustadas y además otros factores.
2.6.1 Condición fundamental de los mínimos cuadrados
En un grupo de observaciones distribuidas normalmente, existe la mayor posibilidad de que los errores pequeños ocurran en mayor cantidad que los grandes, además, se tiene la probabilidad específica de que exista un error residual dentro de un conjunto de errores. El método de los mínimos cuadrados se deriva de la ecuación para la curva de distribución normal. El método genera aquel conjunto único de residuos en un grupo de mediciones que tiene la mayor probabilidad de ocurrir.
Para un grupo de observaciones ponderadas, la condición fundamental impuesta por los mínimos cuadrados es que la suma de los cuadrados de los residuos debe ser un mínimo. Supongamos un grupo de m mediciones de igual peso, cuyos residuos sean v1, v2, v3,….,vm.
Entonces en forma de ecuación, la condición fundamental de los mínimos cuadrados es (Ghilani, Paul R. Wolf - Charles D., 2009):
∑ 𝑣𝑖 = 𝑣 𝑖=
, + 𝑣 + 𝑣 + + 𝑣 → í 𝑖
41 2.6.2 Principio de los mínimos cuadrados
2.6.2.1 Para observaciones de igual precisión
Consideramos una variable aleatoria topográfica x, que sigue una distribución normal N ( , σ), siendo µ la media de la distribución y σ la desviación estándar, parámetros de la distribución, cuya función densidad de probabilidad es:
=
=
𝜎√ 𝜋 −𝜎 −𝜇 (1)Suponiendo que se realizan n mediciones independientes con la misma precisión y se obtienen los valores x1, x2 ,…, xn . Siendo m el valor más probable de esa magnitud, podemos definir los residuos como la diferencia entre las cantidades obtenidas en las mediciones y el valor más probable m.
=
−
(2)
=
−
[image:41.595.215.437.373.671.2]=
−
Figura 14. Distribución normal N
Fuente: (Abellán García, María, 2013)
42
minimizar la suma + + , es decir, se debe minimizar la suma de los cuadrados de los residuos.
∑ 𝑖 = + + … → 𝑖 𝑖 (3)
La condición de Legendre, expresa el principio fundamental de los mínimos cuadrados, ésta condición también se puede expresar de la siguiente forma:
∑ 𝑖 = − + − + + − = ∑ 𝑖− (4)
En donde:
= + + + 𝑛 (5)
Lo que indica que el valor más probable de una magnitud que ha sido medida varias veces independientemente, es la media aritmética.
2.6.2.2 Observaciones de distinta precisión.
Este es el caso más común del ajuste por mínimos cuadrados, que tiene en cuenta que las observaciones puedan tener diferente precisión, y por tanto, diferentes pesos.
Supongamos que una magnitud topográfica x que sigue una distribución normal, de la cual se han realizado un grupo de medidas de pesos relativos P1, P2,…Pn, y que han originado unos
residuos r1, r2,…,rn, respectivamente.
La condición del ajuste por mínimos cuadrados ponderados es:
∑ 𝑖 𝑖 = + + + → í 𝑖 (6)
Y sustituyendo en la ecuación anterior los valores de los residuos, tendremos:
∑ 𝑖 𝑖 = − + − + + − → í 𝑖 (7)
En donde:
=∑ 𝑝𝑖 𝑖∑ 𝑝𝑖 (8)
43
Entonces según el Principio de Legendre, que es la base del Método de los Mínimos Cuadrados como:
“dado un conjunto finito de medidas x1, del mismo peso (o de pesos Pi), de una magnitud X,
se considera como valor más probable de esta, a la cantidad que hace mínima la expresión
∑ 𝑖 (o la expresión ∑ 𝑖 𝑖) “ .
Entonces se puede definir el Ajuste de Mínimos Cuadrados como la resolución de un modelo matemático en donde tenemos mayor número de ecuaciones que incógnitas. Al que hay que aplicar la minimización cuadrática a los errores cometidos en el proceso de observación.
2.6.3 Solución matricial para el ajuste, por medio de ecuaciones de observación, para mediciones de igual precisión. Modelo lineal.
Partiendo de una serie de mediciones topográficas realizadas con el mismo instrumento y en las mismas condiciones, se puede plantear el siguiente sistema de ecuaciones lineales de observación, en su forma más general:
+ + + + = +
+ + + + = + (9)
+ + + + = +
Habiendo m ecuaciones con igual número de observaciones, n incógnitas, igual al número mínimo de observaciones necesarias para resolver el modelo, y m>n.
El sistema se expresa de forma matricial así:
𝐴 + = + (10)
𝐴 = ( ) ; = ( ) ; = ( )
44 En donde:
A: matriz de los coeficientes de las incógnitas. x: vector de incógnitas.
r: vector de residuos.
d, l: vectores del término independiente.
El método de mínimos cuadrados, minimiza la suma de los cuadrados de los residuos, ∑ 𝑖 →mínimo. Expresando esta condición en forma matricial.
𝑡 → mínimo (12)
Las ecuaciones normales que resultan de un conjunto de ecuaciones se expresan así: 𝐴𝑡𝐴 = 𝐴𝑡
𝑁 = (13)
Estas expresiones se conocen con el nombre de ecuaciones normales, debido a que se trata de un sistema de n ecuaciones con n incógnitas, siendo N la matriz de los coeficientes de las ecuaciones normales, matriz simétrica no singular.
Finalmente las expresiones siguientes, representan el vector solución al sistema de ecuaciones inicial
= 𝐴𝑡𝐴 − 𝐴𝑡
= 𝑁− (14)
Tras este cálculo, se puede determinar los residuos del ajuste mediante:
45 Considerando el sistema inicial reagrupado:
𝐴 = + − (16)
Podemos llamar
̂ = − (17)
Este vector contiene las observaciones ajustadas.
2.6.4 Solución matricial al ajuste por ecuaciones de observación, para mediciones de distinta precisión. Modelo lineal.
Como en el caso anterior, partiendo de una serie de mediciones topográficas, se propone el siguiente sistema de ecuaciones de observación.
+ + + + = +
+ + + + = + (18)
+ + + + = +
Las cantidades pi corresponden a los pesos de cada observación, existiendo m ecuaciones
de igual número de observaciones y n incógnitas con igual número mínimo de observaciones necesarias para resolver el modelo, y m >n.
Expresándolo en forma matricial
𝑃 𝐴 + = 𝑃 + (19)
Si decimos = + , el sistema queda de la forma:
𝑃 𝐴 + = 𝑃 (20)
46
Pmxm= Amxm =
xnx1= (21)
fmx1= ; rmx1 =
La solución mínimos cuadrados minimiza la suma de los productos de los pesos por los residuos al cuadrado, ∑ 𝑖 𝑖 →mínimo. En forma matricial sería 𝑡𝑃 → mínimo.
Y la expresión que determina la solución al sistema de ecuaciones inicial es: = 𝐴𝑡𝑃𝐴 − 𝐴𝑡𝑃
= 𝑁− (22)
Se puede determinar los residuos del ajuste mediante
= − 𝐴 (23)
Y el vector:
̂ = − (24)
De las mediciones ajustadas.
Suponiendo que todas las observaciones tienen igual peso, la matriz P se convierte en la matriz identidad I, cuya solución sería:
= 𝐴𝑡𝐴 − 𝐴𝑡 (25)
2.6.5 Ecuaciones no lineales
Para trabajos topográficos específicos se ejecutan mediciones que conducen a ecuaciones no lineales, es el caso de la medida de ángulos y distancias.
p1 0 … 0
0 p2 … 0
… … … …
0 0 … pm
a11 a12 … a1n
a21 a22 … a2n
… … … …
am1 am2 … amn
x1 x2
…
xn
d1 + l1
d2 + l2 … dm + lm
x1 x2
…
47
Para poder abordar el ajuste por mínimos cuadrados y solucionar sistemas de ecuaciones no lineales, se procede a su liberalización mediante el desarrollo en serie de Taylor de primer orden.
En la siguiente ecuación se relaciona un valor observado l con dos variables, x e y, mediante una función f no lineal.
= , (26)
Aplicando el teorema de Taylor, se puede aproximar la función f mediante su desarrollo en serie.
= , = + !([𝜕𝑓𝜕 ] + [𝜕𝜕𝑓] ) + !([𝜕 𝑓𝜕 ] + [𝜕𝜕 𝑓] +
2 [𝜕 𝑑𝜕 𝑓] ) + (27)
En donde son valores iniciales aproximados de x, y; es el valor de la función no lineal evaluada para esos valores iniciales y dx, dy son las correcciones a los valores iniciales aproximados tal que:
= +
= + (28)
Mientras mayor es el valor de n, mejor es la aproximación que se obtiene de la función, aunque la significación de estos términos va disminuyendo. Si despreciamos los términos correspondientes a las derivadas superiores al primer orden, se obtiene la siguiente expresión lineal que aproxima la función f.
≈ , ≈ + [𝜕𝑓𝜕 ] + [𝜕𝑓𝜕 ] (29)
48
2.6.6 Solución matricial al ajuste por ecuaciones de observación para mediciones de igual precisión. Modelo no lineal.
Como en los casos anteriores, si tenemos un proyecto topográfico con un conjunto de observaciones, en este caso el conjunto vincula incógnitas a calcular, mediante funciones no lineales, dando lugar al siguiente sistema:
𝐹 , , … , + = −
𝐹 , , … , + = −
(30)
𝐹 , , … , + = −
Usando el desarrollo en serie de Taylor hasta el primer orden, podemos convertir a lineal el sistema anterior, que matricialmente puede ser escrito de la siguiente manera:
𝐽 + =
= − (31)
J representa la matriz Jacobiana, que es la matriz de las derivadas parciales que contiene los coeficientes de las ecuaciones de observación linealizadas, siendo estas matrices:
49
El vector x de modificaciones, correspondiente a la solución por mínimos cuadrados de un sistema de ecuaciones de observaciones de igual precisión es:
= 𝐽𝑡𝐽 − 𝐽𝑡 = 𝑁− 𝐽𝑡 (33)
Siendo 𝑁 = 𝐽𝑡𝐽 la matriz de las ecuaciones normales.
2.6.7 Solución matricial para el ajuste mediante ecuaciones de observación para mediciones de distinta precisión. Modelo no lineal.
Para mediciones de diferente precisión, el sistema sigue la forma:
𝑃 𝐽 + = 𝑃 (34)
Y la solución es:
= 𝐽𝑡𝑃𝐽 − 𝐽𝑡𝑃 = 𝑁− 𝐽𝑡𝑃 (35)
P es la matriz diagonal de los pesos de las observaciones y 𝑁 = 𝐽𝑡𝑃𝐽 la matriz de las ecuaciones normales.
De la misma manera como en los casos anteriores, se puede determinar los residuos del ajuste mediante:
= − 𝐽 (36)
Y el vector:
̂ = − (37)
De las observaciones ajustadas.
2.6.8 Ajuste de mínimos cuadrados de los vectores de línea base para el GPS
50 2.7 Estándares de Precisión
Para poder obtener la precisión deseada, se deben examinar las mediciones del levantamiento, ser estricto en el manejo adecuado de los equipos, pero principalmente para obtener una buena precisión en las observaciones se debe colocar el equipo durante un tiempo aceptable estimado.
Las precisiones que se obtienen con los equipos GPS en post-proceso, puede ser del siguiente orden (Farjas, 2011):
Estático Relativo: 5mm ± 1ppm (partes por millón)
Estático Relativo Rápido: 5 a 10mm ± 1ppm (partes por millón)
RTK: 2cm ± 1ppm (partes por millón)
Las sesiones de observación se deben planificar dependiendo de la longitud de la línea base a medir, y el tipo de instrumento que se tenga. En la Tabla 1, considera valores de tiempos de observación:
Tabla 1. Precisión de acuerdo al tiempo de observación
Longitud de línea base
Monofrecuencia Estático
Doble Frecuencia Estático
Doble Frecuencia Estático Rápido (Fast Static) < 1km 20 – 40 min 20 – 40 min 5 – 10 min 1 – 10 km 30 – 60 min 30 – 60 min 5 – 10 min 10 – 30 km 45 – 120 min 45 – 90 min
> 30 km > 60 min
Fuente: (Farjas, 2011)
51
52 3.1 Inventario de la antigua red tipográfica UTPL
La Universidad Técnica Particular de Loja, cuenta con una red de control topográfica antigua determinada en diciembre de 2011. El proyecto tenía como finalidad establecer una Red georreferenciada con coordenadas UTM enmarcada en el Sistema Geodésico Mundial WGS84, utilizando para ello un equipo GPS doble frecuencia Leica 1200; sin embargo, se han detectado variaciones en dicha red por lo que actualmente no es adecuada utilizarla hasta efectuar nuevas mediciones para validarla.
Esta red está compuesta de 8 puntos alrededor del campus, dichos puntos se caracterizan por estar materializados por bases tipo tornillo de bronce con tapa enroscable.
Cabe Señalar que algunos de estos puntos han sido removidos, por las nuevas obras de ingeniería implementadas en esos lugares.
[image:52.595.105.524.393.652.2]Según la memoria del trabajo, la antigua red fue procesada en el programa Leica Geoffice 8.1. Los puntos que forman parte de la antigua red se presentan en el Tabla 2.
Tabla 2. Inventario de la antigua red de control geodésico de la UTPL
País: Ecuador Provincia: Loja
Cantón: Loja Sector: San Cayetano Alto
Punto Ubicación Estado actual
GPS 01 A 35m de la calle París, cerca de la garita de control de seguridad Se encuentra en condiciones estables.
GPS 02 Frente al edificio central, a 9m del redondel. Se encuentra en buenas condiciones.
GPS 03 A 30m de la cruz sentido Noreste. No existe GPS 04 En las canchas de la UTPL. No existe GPS 05 A 55m de la planta de lácteos de la UTPL No existe
GPS 06 A 10m de los Laboratorios de Química de la UTPL Se encuentra en buenas condiciones
GPS 07 Calle Marcelino Champagnat, a 30m de la intersección con la Av. Santiago de las Montañas
Se encuentra en buenas condiciones
GPS 08 Entre las residencias de los hermanos Identes No existe
Fuente: Jaramillo Quito Mercedes Gabriela, 2014
3.2 Selección de los sitios y Amojonamiento
3.2.1 Reconocimiento de campo y selección de los sitios
53
las nuevas estaciones que se añadirían a la antigua red, y que se manejaría como un nuevo proyecto. Para definir la ubicación de cada punto, se tomó en cuenta los siguientes criterios:
Al menos dos puntos deben ser intervisibles entre sí.
El lugar a colocar la estación sea de fácil acceso y que no provoque perturbaciones en las mediciones (líneas de transmisión eléctrica, campos magnéticos, etc.).
Evitar la existencia de superficies reflectantes a menos de 50 metros de la estación (como espejos de agua, techos planos metálicos o cubiertas de materiales reflectantes), también evitar paredes, muros, edificios, etc.
El terreno debe ser estable a fin de garantizar la permanencia de la placa o mojón a implantar y así evitar cambios en la posición.
De esta manera han quedado establecidos 6 puntos para la nueva red, incluyendo un punto monumentado correspondiente al IGM (Instituto Geográfico Militar), que se encuentra en los altos de la UTPL (La ubicación de cada punto se muestra en las reseñas respectivas como anexo a este trabajo) para validar el procedimiento.
3.2.2 Amojonamiento
Las marcas utilizadas para la representación de cada punto en el terreno, se caracterizan por ser placas de aluminio con base tipo tornillo. Estas fueron confeccionadas en aluminio fundido. Son placas circulares de 10 centímetros de diámetro, cada una de ellas con una inscripción como se puede observar en la siguiente Figura 15.
[image:53.595.130.417.482.607.2]
Figura 15. Placa de aluminio a utilizada para la señalización
Fuente: La autora
Para su instalación, se procedió de la siguiente manera:
54
Figura 16. Perforación del terreno
Fuente: Jaramillo Quito Mercedes Gabriela, 2014
[image:54.595.218.440.73.244.2] Una vez limpia la superficie y a fin de garantizar la estabilidad y permanencia de la placa se empleó un pegamento epóxico.
Figura 17. Colocación de pegamento epóxico
Fuente: Jaramillo Quito Mercedes Gabriela, 2014
Antes del secado del pegamento epóxico se procede a limpiar los bordes de la placa tratando en lo posible de sellar completamente cualquier abertura que existiese a fin de evitar la entrada de agua al soporte metálico de la placa.
Figura 18. Placa fijada en el terreno
[image:54.595.211.443.322.513.2]55 3.3 Equipo receptor
[image:55.595.156.458.163.304.2]Para la toma de datos de la posición de los puntos de la red topográfica se empleó un receptor GPS Trimble R6 de doble frecuencia (Figura 19) con su controladora de la misma casa fabricante.
Figura 19. Antena y Controlador del Equipo GPS R6
Fuente: Guía de usuario Trimble
Las especificaciones de precisión de posicionamiento del equipo se detallan a continuación en la Tabla 3.
Tabla 3. Especificaciones de posicionamiento del equipo
Fuente: (Trimble Navigation Limited, Engineering and construction group, 2009)
3.4 Fase de observación con el receptor
Previo al inicio de la fase de toma de datos se constató el estado del equipo así como de la memoria tanto de la antena como de la controladora.
Característica Especificaciones
Posicionamiento diferencial
Horizontal ±0.25m +1ppm
Vertical ±0.50m +1ppm
GPS Static y FastStatic
Horizontal ±5mm +0.5ppm
Vertical ±5mm +1ppm
Levantamiento cinemático
Horizontal ±10mm +1ppm
[image:55.595.144.480.435.641.2]56
57