1
ON THE STABILITY OF THE MOTION FOR A NEO-HOOKEAN
SYSTEM
Nicolae–Doru Stănescu
University of Piteşti, Department of Applied Mechanics, Piteşti, Romania
Abstract
It is well known that the vibrations are a major cause for the instability in the mechanical systems and major source of noises. In this paper we propose a simple system with two degrees of freedom based on a non-linear elastic element. For this system, it is proved in the present paper that the motion is stable, but not asymptotically stable. A comparison between the non-linear case and the linear case is performed, and for the both cases the eigenpulsations are also determined. All theoretical results are validated by numerical simulation.
Keywords: neo-Hookean, motion, stability, numerical validation.
1. Introduction
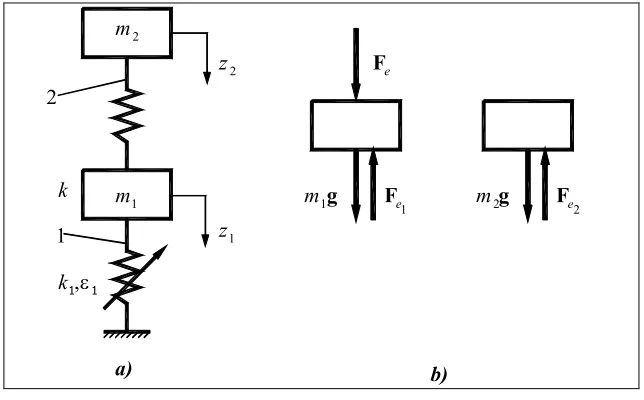
The system purposed for the study is described in figure 1, a. It consists of the masses m1 and m2
linked one to another by the linear spring of stiffness k . The mass m1 can be considered to be the foundation of the machine-tool, and the mass m2 the machine-tool itself. The mass m2 is linked to the ground by the non-linear spring 1 for which the elastic force writes
2 1 1
x x k
F= − ε , (1)
where x is the elongation of the spring. The fundamental working hypothesis is that
0
1>
ε . (2)
The system has two degrees of freedom, that is the displacements z1 and z2 of the two masses in the vertical direction.
2. The equations of motion
2
b) a)
2
e
F
m2g g
1
m
1 Fe
e
F
1 2
2
z
1
z k
2
m
1
m
ε1
, 1
[image:2.595.137.459.98.298.2]k
Figure 1 – The mathematical model
(
z z)
mgk z z k z
m 2 2 1 1
1 1 1 1 1
1 + − +
ε + − =
&
& ,
(
)
1 2 2
2
2z m g k z z
m && = − − , (3)
where g is the gravitational acceleration. Denoting
1
1=z
ξ , ξ2 =z2, ξ3 =z&1,
2 4 =z&
ξ , (4)
the relations (3) transform in a system of four first order non-linear differential equations,
3
1 =ξ
ξ&
, ξ&2 =ξ4,
(
)
+ ξ − ξ + ξ ε + ξ − =
ξ k k mg
m 12 2 1 1
1 1 1 1 3
1
&
,
[
2(
2 1)
]
2 4
1
ξ − ξ − =
ξ m g k
m &
. (5)
3. The equilibrium positions
These positions found at the intersections of the nullclines, so that one obtains the system
0
3 =
ξ , ξ4 =0,
(
2 1)
1 02 1 1 1
1 ξ + ξ −ξ + =
ε + ξ
−k k mg , m2g−k
(
ξ2−ξ1)
=0. (6)Summing the last two relations (6), it results
(
1 2)
02 1 1 1
1 ξ + + =
ε + ξ
−k m m g , (7)
wherefrom
(
1 2)
12 1 0 31
1ξ − m +m gξ −ε =
k . (8)
3
(
1 2)
12 1 0 31
1ξ + m +m gξ +ε =
k (9)
for which there exists no variation of sigh in the sequence of the coefficients so that the Descartes theorem assures us that we have no negative real root for the equation (8). In conclusion, the equation (8) has exactly one positive real root, name it ξ1.
The last relation (6) becomes now a linear equation in the unknown ξ2 and therefore it has only one solution,
1 2
2 = +ξ
ξ
k g m
. (10)
We proved in this way that the system has only one equilibrium position
(
ξ1,ξ2,0,0)
. Let us denote by f( )
ξ1 the function f :R→R,( )
(
)
2 11 2 1 3 1 1
1 = ξ − + ξ −ε
ξ k m m g
f (11)
for which the derivative is
( )
(
1 2)
12 1 1
1 =3 ξ −2 + ξ
ξ
′ k m m g
f . (12)
The equation f′
( )
ξ1 =0 has the solutions( )1 0
1 =
ξ , ( )
(
)
1 2 1 2
1
3 2
k g m
m +
=
ξ , (13)
( )1 1
ξ being a point of maximum, and ξ1( )2 a point of minimum. In addition,
( )
0 =−ε1<0f . (14)
ε1
O
ξ1 ξ1
1
ξ
(2)
f ( )
[image:3.595.122.530.246.684.2]ξ1
Figure 2 – The graphic of the function f
( )
ξ1 .Graphically, the situation is presented in figure 2. It follows from here that
(
)
1 2 1 1
3 2
k g m
m +
>
4
4. The stability of the equilibrium
Let us denote by fk, k =1,4 the right-hand terms of the relations (5) and by jkl the partial derivatives
l k kl
f j
ξ ∂ ∂
= , k =1,4, l=1 ,4. (16)
We have
0
11=
j , j12=0, j13=1, j14 =0, (17)
0
21=
j , j22=0, j23=0, j24 =1, (18)
ξ ε − − −
= 3
1 1 1
1 31
2 1
k k m
j ,
1 32
m k
j = , j33=0, j34 =0, (19)
2 41
m k
j = ,
2 42
m k
j =− , j43 =0, j44=0. (20)
The characteristic equation
(
)
0det J−λI = (21)
in which J is the Jacobi matrix,
[ ]
4 , 14 , 1
= =
=
l k kl
j
J , and I is the fourth order unity matrix, reads
0
0 0 1 0 0
0 1 0
42 41
32 31
=
λ − λ − λ − λ −
j j
j
j . (22)
Multiplying the third column by λ and adding it to the first column, the fourth column by λ and adding it to the second column, results the equation
(
31 42)
2 31 42 32 41 04 − + λ + − =
λ j j j j j j . (23)
From the Routh–Hurwitz criterion we deduce that the equation has not all the roots with negative real part and therefore the equilibrium can not be asymptotically stable.
On the other hand, the roots of the equation (23) are
(
)
2
4 32 41 2
42 31 42
31 2 1
j j j
j j
j + ± − +
=
λ . (24)
Keeping into account the expressions (17)-(20), we have
0 2
2 1
3 1 1 1
42
31 − <
ξ ε + + − = +
m k m
k k
j
j , (25)
0 4 4
2 1
2
41
32 = >
m m
k j
5
(
j31− j42)
2 +4j32j41>0, (27) More,(
)
2 32 4142 31 42
31 j j j 4j j
j + > − + (28)
because it is equivalent to
41 32 42
31j j j
j > , (29)
that is
2 1
2
2 3 1 1
2 1
2
2 1
1 2
m m
k m
k m
m k m m
k k
> ξ
ε +
+ . (30)
The previous relations assure us that λ21<0, λ22 <0 so that the roots of the characteristic equation (23) are all pure imaginary. The equilibrium position
(
ξ1,ξ2,0,0)
is simply stable.5. The stability of the motion
Let
(
ξ1,ξ2,ξ3,ξ4)
a solution of the system (5) and(
u1,u2,u3,u4)
a deviation sufficiently small in its norm. We can write3 3 1
1+u =ξ +u
ξ& & ,
4 4 2
2+u =ξ +u
ξ& & ,
(
)
(
)
(
)
+ − + ξ − ξ + + ξ
ε + + ξ − = +
ξ k u u m g
u u
k m
u 2 1 2 1 1
2 1 1
1 1
1 1 1 3 3
1
&
& ,
(
)
[
2 2 1 2 1]
2 4 4
1
u u k
g m m
u = − ξ −ξ + −
+
ξ& & .
(31)
Since u1 <<ξ1 we can approximate
(
)
3 11 1 2 1 1 2 1 1
1 2 u
u ξ
ε − ξ
ε ≈ + ξ
ε
. (32)
Keeping into account that
(
ξ1,ξ2,ξ3,ξ4)
is a solution of the system (5), from the relations (31) and (32) we obtain the system in deviations3
1 u
u& = ,
4
2 u
u& = ,
(
)
− + ξ ε − −
= 3 2 1
1 1 1 1 1 1 3
2 1
u u k u u
k m
u& ,
[
(
)
]
1 2 2 4
1
u u k m
u& = − − , (33)
wherefrom
(
2 1)
3 1 1 1 1 1 1 1
2
u u k u u
k u
m + −
ξ ε − − =
&
& ,
1 2 2
2u ku ku
m && =− + . (34)
6 2 2 2 1 u k u m
u = && + ,
( ) 2 2 2 1 u k u m u iv & & &
& = + , (35)
the first relation (34) offering now
( ) 2 0
2 2 1 3 1 1 1 2 2 2
1 + =
+ ξ ε + +
+ k k m u ku
k m u
k m
m iv &&
. (36)
The characteristic equation reads now
0 2 2 1 3 1 1 1 2 4 2
1 + =
+ ξ ε + +
+ k k m r k
k m r k m m
. (37)
The discriminate of this equation is
(
)
(
)
2(
)
2 04 2 3 1 1 1 2 1 2 2 1 2 2 1 2 2 1 2 1 3 1 1 1 2 > ξ ε + + + + + − = − + ξ ε + + = ∆ k k m m m k k k m m m m m m k k k m (38)
and, in addition,
2 1 3 1 1 1 2 2 + ξ ε + + <
∆ k k m
k m
. (39)
Keeping into account that
0 2 1 3 1 1 1
2 + >
ξ ε + +
= k k m
k m
a (40)
it immediately results that r12 <0, r22 <0 so that the roots of the characteristic equation (37) are all pure imaginary, the motion being stable, but not asymptotically stable.
The solution of the equation (36) is
ϕ + ∆ + + ϕ + ∆ − = 2 2 1 2 1 2 1 1
2 cos 2 cos 2 t
m m k a C t m m k a C
u . (41)
By twice derivation of the expression (41), we obtain
ϕ + ∆ + ∆ + − ϕ + ∆ − ∆ − − = 2 2 1 2 2 1 1 2 1 1 2 1
2 2 cos 2 2 cos 2 t
m m k a C m m k a t m m k a C m m k a
u&& (42)
7 ϕ + ∆ + + ∆ + − + ϕ + ∆ − + ∆ − − = 2 2 1 2 2 1 2 1 2 1 1 2 1 2
1 2 1 cos 2 2 1 cos 2 t
m m k a C m m k a k m t m m k a C m m k a k m
u . (43)
Everywhere C1, C2, ϕ1 and ϕ2 are constants of integration, which result from the initial conditions
( )
101 0 u
u = , u2
( )
0 =u20, u&1( )
0 =u&10,( )
20
2 0 u
u& = & .
The expressions (41) and (43) approximate the solution of the system in deviations (31).
6. The small oscillations around the equilibrium position
These can be obtained as a particular case of the previous paragraph for
1
1 =ξ
ξ . (44)
Result the eigenpulsations
2 1 2 1 2 1 3 1 1 1 2 1 3 1 1 1 2 1 2 4 2 2 m m k m m m k k k m m k k k m − + ξ ε + + − + ξ ε + + = ω , 2 1 2 1 2 1 3 1 1 1 2 1 3 1 1 1 2 2 2 4 2 2 m m k m m m k k k m m k k k m − + ξ ε + + + + ξ ε + + = ω (45)
7. Comparison with the linear case
The linear case is obtained for ε1=0. The equation (7) writes
(
1 2)
01
1ξ + + =
−k m m g , (46)
with the solution
( ) g
k m m l 1 2 1 1 + =
ξ . (47)
One observes that ξ1( )l <ξ1 for which holds true the relation (15). The relation (10) offers
( ) g
8 and therefore ξ2( )l <ξ2, too.
The equilibrium remains again simply stable because the relations (25)-(30) still hold true. The motion is again simply stable and we have in addition
( )
(
)
2(
)
,4
1 2 1 2 2 1 2 2 1 2
2 1 2 1 2 1 2
k k m m m k
k m m
m
m m k
k m m m
l
+ + + − =
−
+ +
= ∆
(49)
( )
k k m m m
al = 2 + 1+ 2 1, (50)
with
( ) >0
∆l , ∆( )l <∆, a( )l >0, a( )l <a. (51)
The eigenpulsations are
( )
2 1
2 1 2 1 2 1 2 1
2 1 2
1 2
4
m m
k
m m k
k m m m k
k m m m
l
−
+ +
− + + =
ω ,
( )
2 1
2 1 2 1 2 1 2 1
2 1 2
2 2
4
m m
k
m m k
k m m m k
k m m m
l
−
+ +
+ +
+ =
ω .
(52)
8. Numerical application
Let us consider the case
kg 2000
1 =
m , m2 =1000kg, g=10m/s2, k1=106 N/m, ε1=700Nm2, k =105 N/m. (53)
The equation (8) leads us to
0 700 10
3000
106ξ13− × ξ12− = (54)
with the solution
m 1 . 0
1=
ξ . (55)
The relation (10) offers us
m 2 . 0 1 . 0 10
10 1000
5
2 + =
× =
ξ . (56)
9
(
)
m 02 . 0 10 3 10 1000 2000 2 m 1 . 0 6 = × × + ×> . (57)
The equations (17)-(20) lead us to
1250 1 . 0 700 2 10 10 2000 1 3 5 6
31 =−
× − − − × =
j , 50
2000 105
32 = =
j , 100
1000 105
41 = =
j ,
50 2000
105
42 =− =−
j ,
(58)
the roots of the characteristic equation (23) being (24)
(
)
2 100 50 4 50 1250 50 1250 2 2 1 × × + + − ± − − =λ , λ21 =−45.848, λ22 =−1254.152. (59)
The parameters a and ∆ are
27000 2000 1 . 0 700 2 10 10 10 1000 3 5 6
5 + =
+ + ×
=
a , (60)
721000000 1000 2000 4 2000 1 . 0 700 2 10 10 10 1000 2 3 5 6
5 − × × =
+ + + × =
∆ . (61)
The eigenpulsations read
1 -5
1 38.543s
1000 2000 10 2 721000000 27000 = × × − =
ω , 1 5 733.835s-1
1000 2000 10 2 721000000 27000 = × × + = ω (62)
In the linear case we have
( ) 10 0.03m
10 1000 2000
6
1 × =
+ =
ξl
, ( ) 10 0.13m
10 1000 2000 10 10 1000 6 5
2 × =
+ + × =
ξl
, (63)
( ) 13000
10 10 1000 2000 1000 5 6 = × + + = l
a , (64)
( ) 4 2000 1000 161000000
10 10 1000 2000 1000 2 5 6 = × × − × + + =
∆l , (65)
( ) 1
5
1 55.805s
1000 2000 10 2 161000000 13000 -l = × × − =
ω , ( )2 5 506.839s1
1000 2000 10 2 161000000 13000 -l = × × + = ω . (66)
One observes that
( )l
1
1 <ω
ω , ω2 >ω( )2l , (67)
10
0.08 0.1 0.12
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
1
[
m
]
0.19 0.2 0.21 0.22
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
2
[
m
]
-0.4 -0.2 0 0.2 0.4
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
3
[
m
/s
]
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
4
[
m
/s
[image:10.595.124.473.99.357.2]]
Figure 3 – The time history for the system with parameters (53) and the initial conditions (68).
0.04 0.06 0.08 0.1 0.12 0.14 0.16
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
1
[
m
]
0.1 0.15 0.2 0.25 0.3
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
2
[
m
]
-1.8 -1.2 -0.6 0 0.6 1.2 1.8
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
3
[
m
/s
]
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
4
[
m
/s
]
Figure 4 – The time history for the system with parameters (53) and the initial conditions (69).
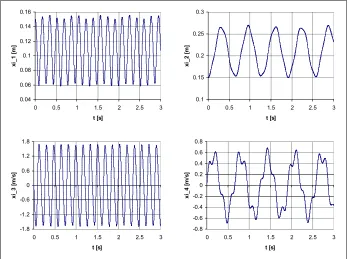
In figure 3 are represented the diagrams ξi
( )
t , i=1 ,4 for the parameters (53) the initial conditions beingm 11 . 0
10 =
[image:10.595.124.473.390.649.2]11
0.04 0.06 0.08 0.1 0.12 0.14 0.16
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
1
[
m
]
0.1 0.15 0.2 0.25 0.3
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
2
[
m
]
-1.8 -1.2 -0.6 0 0.6 1.2 1.8
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
3
[
m
/s
]
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
4
[
m
/s
[image:11.595.124.472.113.371.2]]
Figure 5 – The time history for the system with parameters (53) and the initial conditions (70).
-0.005 -0.0025 0 0.0025 0.005
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
1
[
m
]
-0.005 -0.0025 0 0.0025 0.005
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
2
[
m
]
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
3
[
m
/s
]
-0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04
0 0.5 1 1.5 2 2.5 3
t [s]
x
i_
4
[
m
/s
]
Figure 6 – The deviated motion between the systems captured in figures 4 and 5.
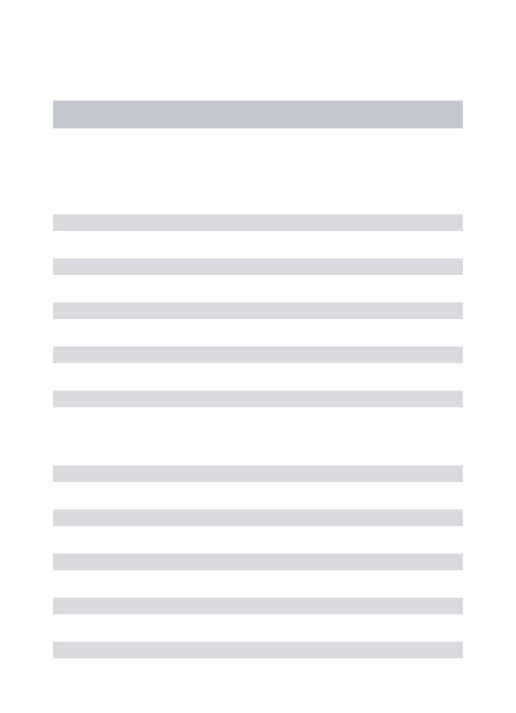
In figure 4 are represented the same diagrams for
m 15 . 0
10 =
[image:11.595.123.473.403.662.2]12 in figure 5 for
m 151 . 0
10 =
ξ , ξ20 =0.149m, ξ30 =0.1m/s, ξ40 =0.02m/s, (70)
and in the figure 6 the deviated motion between the two cases from figures 5 and 6.
9. Conclusions
In this paper we presented a study concerning the influence of the non-linear neo-Hookean elements on the stability of the system machine-tool-foundation. We proved that both the equilibrium and the motion are simply stable and the neo-Hookean element increases the safety domain where the resonance doesn’t appear.
References
[1] Stănescu, N.–D., Munteanu, L., Chiroiu, V., Pandrea, N., Dynamical systems. Theory and
applications, vol. 1, The Publishing House of the Romanian Academy, Bucharest (Romania),
2007.
[2] Stănescu, N.–D., Munteanu, L., Chiroiu, V., Pandrea, N., Dynamical systems. Theory and
applications, vol. 2, The Publishing House of the Romanian Academy, Bucharest (Romania), 2009
(in press).
[3] Pandrea, N., Stănescu, N.–D., Mechanics, Didactical and Pedagogical Publishing House, Bucharest (Romania), 2002.
[4] Stănescu, N.–D., Numerical methods, Didactical and Pedagogical Publishing House, Bucharest (Romania), 2007.
[5] Teodorescu, P.P., Stănescu, N.–D., Pandrea, N., Numerical analysis with applications to