“
PROPUESTA DE UN SISTEMA DE
MONITOREO GNSS PARA
MÉXICO
”
TESIS
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERÍA DE
TELECOMUNICACIONES
PRESENTA
ING. VÍCTOR JOSÉ GATICA ACEVEDO.
DIRECTOR DE TESIS
M. en C. MIGUEL SÁNCHEZ MERAZ
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓNRESUMEN
ABSTRACT
͞Nunca cedas el lugar ante un problema si no has hecho el intento si quiera por resolverlo͟
José Isabel Gatica Riachi
AGRADECIMIENTOS
Me permito la oportunidad de expresar mi más sincero agradecimiento a todas aquellas personas que me han apoyado en la culminación de este trabajo.
Primeramente al Instituto Politécnico Nacional, por su noble función social de abrir las puertas al conocimiento científico y tecnológico con el propósito de contribuir al desarrollo de nuestro magnífico país. Pertenecer a esta casa de estudios es un gran honor.
A los profesores e investigadores de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco y de la Sección de Estudios de Posgrado e Investigación, por brindarme su conocimiento y experiencias las cuales son un tesoro invaluable.
A mis grandes amistades que la vida me ha dado la oportunidad de conocer, las cuales me han acompañado y brindado su apoyo de manera incondicional.
A mi asesor el M. en C. Miguel Sánchez Meraz, por su apoyo y confianza depositada en mí para la realización de este trabajo y mi trayectoria dentro del programa de investigación.
A mis hermanas Miriam Janet, Isabel Rocío, Karen Christally y mi hermano Jesús Emmanuel. Forman pilares muy importantes en mi vida y siempre formarán parte de mis logros.
A mi papá José Isabel Gatica Riachi, tu siempre serás un gran ejemplo a seguir. Gracias por haberme enseñado el maravilloso camino a la superación mediante el esfuerzo y dedicación. Tu recuerdo es una gran luz que no se apaga fácilmente.
Contenido
Capítulo 1 - Sistemas Globales de Navegación Satélital ... 1
1.1 Introducción ... 1
1.2 Arquitectura de un GNSS ... 1
1.3 Determinación de la posición a traves de la medición de señales emitidas por los satélites ... 3
1.4 Fuentes de error ... 6
1.4.1. Seudorango y los efectos de las fuentes de error... 8
1.5 Geometría de los satélites- Dilución de la Precisión (DOP) ... 8
1.6 Técnicas diferenciales ... 10
1.6.1. WADGPS ... 11
Capítulo 2 - Sistemas de Navegación Aérea ... 13
2.1 Introducción ... 13
2.2 Requisitos de Desempeño de los Sistemas de Navegación ... 14
2.3 Sistemas CNS/ATM ... 15
2.3.1. Enfoque de la implantación ... 16
2.3.2. Ventajas de los sistemas CNS/ATM ... 16
2.4 Navegación de Area (RNAV) ... 17
2.5 Navegacion Basada en Desempeño (PBN) ... 18
2.6 Desempeño Requerido para Navegación (RNP) ... 19
2.6.1. Precision de navegacion ... 19
2.6.2. Aplicación y selección de los tipos de RNP ... 20
2.7 GNSS y su aplicación en la aeronáutica civil ... 21
Capítulo 3 - Sistemas de aumentación ... 22
3.1 Introducción ... 22
3.3 Operaciónes basadas en GNSS ... 23
3.4 Sistema de Aumentación Basados en Satelites (SBAS) ... 24
3.5 Sistemas de Aumentacion Basados en Tierra (GBAS) ... 26
3.5.1. Operaciones GBAS ... 27
3.6 Sistemas de Aumentación Basados en Aeronave (ABAS) ... 28
3.7 Modelado de un sistema de aumentación ... 29
3.8 Correcciones ionosféricas ... 30
3.9 Correcciones de error de efemérides/reloj de los satélites ... 35
3.10 Aspectos físicos en un sistema de aumentación ... 40
Capítulo 4 - Estudio de visibilidad GNSS sobre México ... 42
4.1 Introducción ... 42
4.2 Criterios para el establecimiento de estaciones de referencia para la verificación de la integridad del sistema GNSS ... 43
4.3 Criterios para el establecimiento de estaciones de referencia para la corrección de efemérides/reloj de satélites del GNSS ... 45
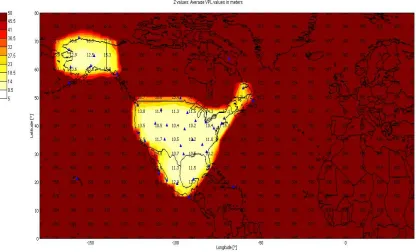
4.4 Estudios de visibilidad de los satélites GNSS sobre la república mexicana. ... 46
4.5 Simulación de visibilidad de constelaciones GNSS sobre el territorio de México ... 47
4.6 Estudios de dilucion de la precisión (DOP) sobre el territorio mexicano .. 51
4.7 Visibilidad del número máximo de satélites GPS monitoreados simultaneamente en por lo menos dos estaciones de referencia. ... 55
4.8 Pruebas realizadas con un receptor gps ... 57
Capítulo 5 - Diseño de la red de monitoreo gnss basado en los criterios del modelo de volumen de servicio ... 62
5.2 Análisis del desempeño en sistemas de aumentación basados en el
modelo de volumen de servicio ... 65
5.3 Análisis de la dilución de la precisión (DOP) ... 68
5.3.1. Resultados para la red de 26 estaciones de referencia ... 68
5.3.2. Resultados para la red de 21 estaciones de referencia ... 71
5.4 Análisis de exactitud... 73
5.4.1. Resultados para la red de 26 estaciones de referencia ... 74
5.4.2. Resultados para la red de 21 estaciones de referencia ... 76
5.5 Disponibilidad GNSS ... 78
5.5.1. Determinación de la disponibilidad GNSS ... 79
5.5.2. Resultados para la red de 26 estaciones de referencia ... 80
5.5.3. Resultados para la red de 21 estaciones de referencia ... 83
Conclusiones Generales ... 104
Trabajos Futuros ... 106
Apéndice A ... 107
Apéndice B ... 110
Apéndice C ... 114
Acrónimos ... 116
INDICE DE FIGURAS
Figura 1 Arquitectura de un GNSS ... 1
Figura 2 Configuración de usuario a satélite. ... 3
Figura 3 Relación de los tiempos de emisión y arribo de las señales entre un satélite GPS y un receptor en Tierra. ... 4
Figura 4 Dilución de la Precisión Geométrica... 9
Figura 5 Esquema de Funcionamiento de un sistema GPS Diferencial ... 11
Figura 6 Beneficios de las rutas RNP RNAV. ... 17
Figura 7 Concepto de RNP ... 20
Figura 8 Esquema de integración de un Sistema de Aumentación Basado en Satélite ... 25
Figura 9 Diagrama esquemático de un Sistema de Aumentación Basado en Tierra ... 27
Figura 10 Entornos de aplicación de SBAS y GBAS. ... 28
Figura 11 Malla de puntos IGP sobre el área de operación de WAAS ... 31
Figura 12 Punto de Penetración Ionosférica ... 32
Figura 13 Error de Efemérides ... 36
Figura 14 Diagrama de flujo para el cálculo de correcciones de efemérides, correcciones de reloj y cálculo del UDRE. ... 37
Figura 15 Radio de cobertura de una estación sobre la Tierra para el monitoreo de un satélite GPS. ... 44
Figura 16 Efecto de Arqueamiento ... 45
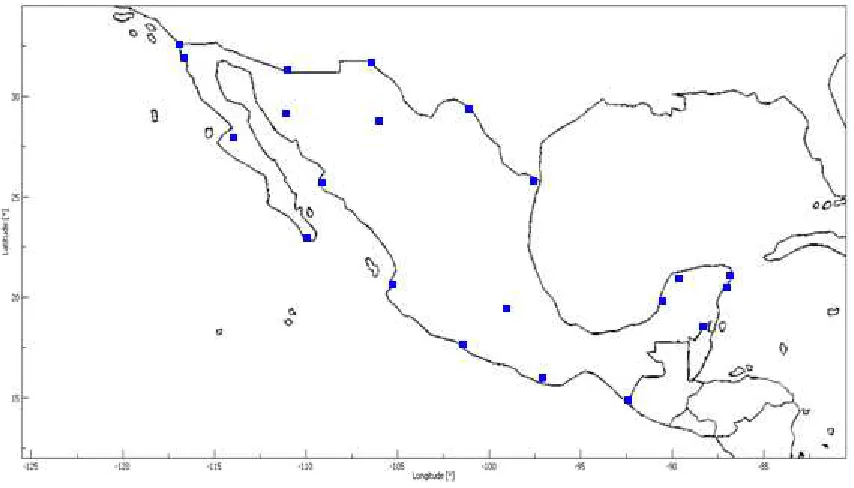
Figura 17 Red de estaciones monitoras diseñada en base a la visibilidad de satélites GPS y recomendaciones de la FAA respecto a un sistema WAAS... 49
Figura 18 Error Máximo en la Posición Horizontal para la red 26 Estaciones de referencia ... 52
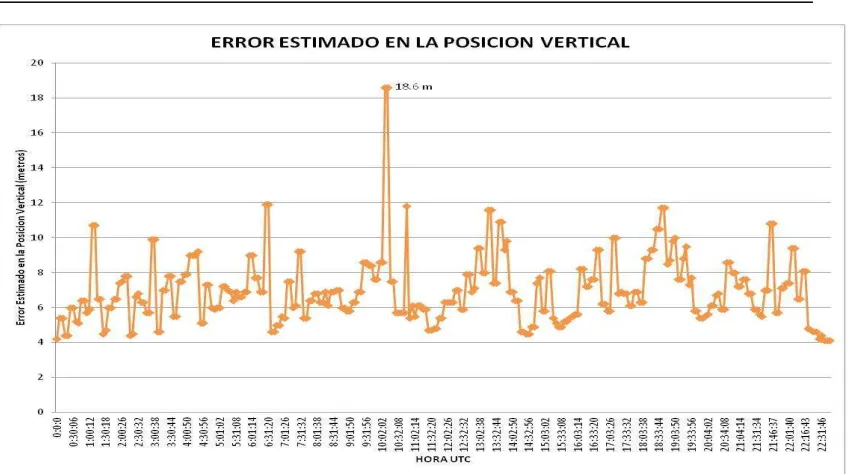
Figura 19. Error Máximo en la Posición Vertical para la red 26 Estaciones de referencia ... 52
Figura 41 Disponibilidad del HPL para operaciones tipo APV-I con la red de 21
Estaciones de Referencia ... 83
Figura 42 Disponibilidad del VPL para operaciones tipo APV-I con la red de 21 Estaciones de Referencia ... 84
Figura 43 Disponibilidad del HPL para operaciones tipo APV-II con la red de 21 Estaciones de Referencia ... 85
Figura 44 Disponibilidad del VPL para operaciones tipo APV-II con la red de 21 Estaciones de Referencia ... 85
Figura 45 Modelo de Klobuchar ... 91
Figura 46 Panel de control de SBAS Simulator ... 94
Figura 47 Resultados gráficos que proporciona el SBAS Simulator ... 95
INDICE DE TABLAS
Tabla 1 Definición de los parámetros de tiempos de emisión y llegada de la señal
GPS y un receptor. ... 4
Tabla 2 Valores promedio de DOP para la constelación GPS. ... 10
Tabla 3 Elementos del sistema CNS/ATM. ... 16
Tabla 4 Tipos de RNP definidos por la OACI ... 20
Tabla 5 Exactitud del Servicio de Posicionamiento estándar ofrecido por los GNSS ... 23
Tabla 6 Significado de los parámetros de la ecuación 3.1 ... 33
Tabla 7 Significado de los parámetros de la ecuación 3.5 ... 38
Tabla 8 Significado de los parámetros de la ecuación 3.7 ... 38
Tabla 9 Número de satélites GPS visibles en los principales Aeropuertos de la República Mexicana ... 48
Tabla 10 Número de satélites GLONASS visibles para la red de 26 estaciones de referencia. ... 50
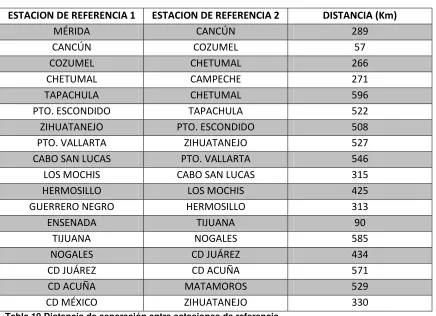
Tabla 11 Distancia de separación entre estaciones de referencia ... 51
Tabla 12 Valores de HDOP y VDOP obtenidos por el SBAS-Simulator ... 53
Tabla 13 Valores de HDOP y VDOP obtenidos reportados por el Centro Técnico William J. Hughes ... 53
Tabla 14 Estadísticas del comportamiento de la HDOP y VDOP ... 54
Tabla 15 Comparación de visibilidad de satélites a partir de mediciones y de simulación. ... 57
Tabla 16 Requisitos de la Señal en el Espacio para operaciones utilizando GBAS. ... 63
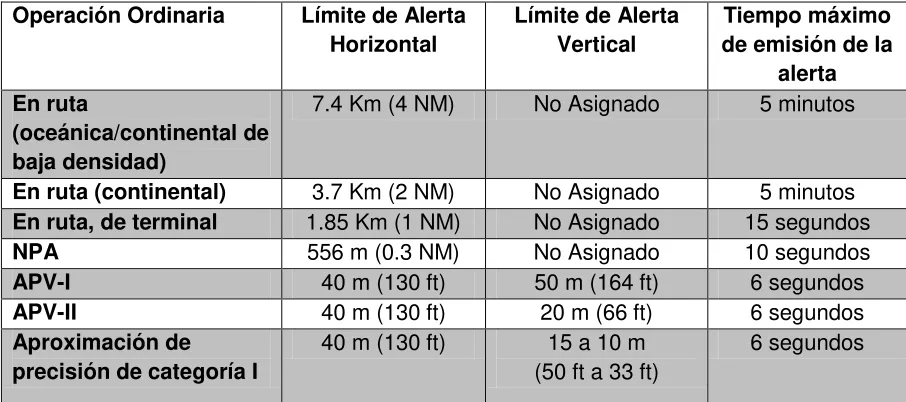
Tabla 17 Valores límite de Alerta para medir la Integridad del GNSS ... 64
Tabla 18 Estaciones de referencia que componen la red de 21 estaciones ... 67
Tabla 19 Distancia de separación entre estaciones de referencia ... 68
Tabla 20 Porcentaje de DOP para la red de 26 estaciones de referencia ... 69
Tabla 21 Porcentaje de DOP para la red de 21 estaciones de referencia ... 71
INTRODUCCIÓN
Los sistemas de aumentación proporcionan correcciones diferenciales a los usuarios de GNSS en una región extensa. Las estaciones de referencia son los elementos componentes de los sistemas de aumentación los cuales miden las distancias hacia los satélites GNSS.
Las correcciones diferenciales son básicamente de dos tipos:
Correcciones de Efemérides/Reloj de los Satélites.
Correcciones de Retardo Ionosféricos.
Estos dos tipos de correcciones imponen ciertos requisitos para el posicionamiento y la cantidad de estaciones de referencia.
La precisión conseguida a través de las correcciones diferenciales que se toma en cuenta para el posicionamiento óptimo de las estaciones de referencia se encuentra en función de las siguientes condiciones:
El ángulo de visibilidad entre la estación de referencia y el satélite
Consideración de la actividad solar y su impacto en la ionosfera para efecto de realizar cálculos de los retardos ionosféricos en las señales GNSS.
Utilización de algoritmos dinámicos para el cálculo de las correcciones de las efemérides/reloj de los satélites y de retardos ionosféricos.
Este trabajo, se orienta en las directrices aplicadas en sistemas de aumentación desplegados en otras partes del planeta y los cuales se encuentran como Normas y Recomendaciones de Organismos Internacionales rectores en la materia, para la realizar la propuesta de una red de estaciones de referencia en el despliegue de un sistema de monitoreo GNSS para la República mexicana.
Una primera etapa del despliegue de un sistema de aumentación sería la instalación de un sistema de monitoreo, ya que la primera tarea para el posible uso de los GNSS en tareas de navegación, sería evaluar el desempeño de las constelaciones GNSS. Este sistema de monitoreo GNSS sería la base para la posterior implementación de un sistema de aumentación.
A continuación se presenta una breve descripción del contenido de este trabajo de tesis.
El capítulo 2 aborda el tema referente a los sistemas de navegación aérea y los requerimientos marcados por la Organización Internacional de Aviación Civil para el uso de los GNSS en la navegación aérea.
El capítulo 3 toca el tema referente a los sistemas de aumentación.
JUSTIFICACIÓN
El sector aeronáutico tiene un papel muy importante en los países en desarrollo, y por lo tanto es necesario implementar sistemas que garanticen la navegación segura en todas las fases de vuelo. Los sistemas de navegación basados en satélite representan una poderosa herramienta para su utilización en la aeronáutica civil. Desde hace ya más de 20 años se han venido realizando desarrollos en sistemas de mejoras aplicados a los sistemas mundiales de navegación satelital. Por mencionar un caso se encuentran las mejoras del servicio de posicionamiento del sistema GPS por medio de técnicas diferenciales. Para las aplicaciones de navegación aérea se requiere instalar una infraestructura compuesta por estaciones de referencia que se encarguen de monitorear el estado de operación de los sistema de navegación basados en satélites. Por medio de esa infraestructura también se tendrá la capacidad de realizar correcciones de posicionamiento y emitirlas para que las aeronaves las apliquen en sus fases de operación. Por lo tanto, es necesario ubicar de manera óptima a las estaciones de referencia dentro de la región de interés, así como la cantidad requerida de estaciones para realizar la tarea de monitoreo y emisión de correcciones.
En nuestro país ya se ha realizado la instalación de algunas estaciones de referencia, como parte de una extensión del sistema de aumentación de los Estados Unidos de América (WAAS) y reportado en [16].
OBJETIVO
Realizar la propuesta de ubicación de una red de estaciones de referencia GNSS para su aplicación en la navegación aérea sobre el territorio de la República Mexicana.
OBJETIVOS PARTICULARES
• Realizar un análisis mediante el uso de herramientas informáticas de visibilidad de satélites de constelaciones GNSS sobre el territorio de la República Mexicana para identificar las posibles ubicaciones de estaciones de referencia de este tipo de sistemas.
CAPITULO 1 -
SISTEMAS GLOBALES DE
NAVEGACIÓN SATÉLITAL
1.1 INTRODUCCIÓN
Los Sistemas Globales de Navegación Satelital (GNSS) son un conjunto de elementos desplegados en el espacio y en tierra los cuales operan entre sí para proporcionar a los usuarios servicio posicionamiento por medio de la medición de señales de radio emitidas desde satélites. A partir de la medición de estas señales y de los datos incluidos en las señales GNSS se extrae la información necesaria para que un usuario pueda determinar su posición en tierra. Este capítulo presenta una breve descripción de la composición de los GNSS, el cómo se realiza el cálculo de la posición y los factores que afectan el desempeño en el cálculo de la posición.
1.2 ARQUITECTURA DE UN GNSS
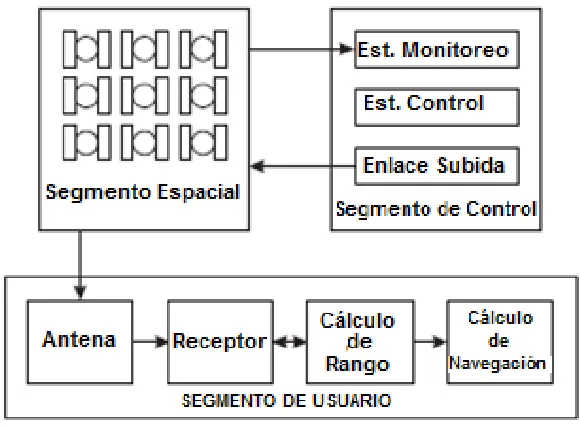
[image:19.612.163.453.404.617.2]Son tres los elementos que básicamente integran un GNSS: el segmento espacial, el segmento de control o segmento en tierra y el segmento de usuario. La Figura 1 proporciona una idea general de la arquitectura de los GNSS [5].
Figura 1 Arquitectura de un GNSS
entre 55° y 60° con referencia al ecuador terrestre, con lo cual se consigue una mayor cobertura en las cercanías de los polos de la Tierra.
La composición de las señales GNSS generalmente se encuentra integrada por una portadora, una secuencia codificada y mensajes con datos de navegación. Las portadoras utilizadas en los sistemas GNSS se encuentran en la banda L del espectro de frecuencia, cubierta desde los 1.17 GHz hasta los 1.6 GHz [5] .La secuencia codificada es un conjunto de bits que modulan a la portadora, es decir, es una palabra de código con un largo definido que permite a los usuarios receptores determinar el tiempo transcurrido a partir de la emisión de las señales por parte de los satélites. Los mensajes con datos de navegación contienen parámetros relacionados con las orbitas de los satélites y los cuales están modulados dentro de la secuencia de código. Esta información es actualizada por el segmento de control.
El segmento de control consiste en una red de estaciones de referencia en tierra, generalmente se encuentran integradas por un conjunto de estaciones instaladas alrededor de la Tierra y también algunas cuentan con estaciones de enlace de subida. La ubicación de las estaciones de referencia se selecciona de manera precisa y están equipadas con relojes de sincronización de un grado alto de precisión, permitiéndoles realizar mediciones con un mínimo error con la finalidad de determinar las orbitas de los satélites y con el propósito adicional de calibrar los relojes de los satélites. También utilizan mediciones de RADAR y dispositivos LASER para determinar las trayectorias.
Las estaciones de control miden los parámetros incluidos en los mensajes de navegación de los satélites de la constelación GNSS, y calculan las correcciones con el propósito de realizar las maniobras necesarias para corregir la trayectoria en la órbita de los satélites. Esto hace que los parámetros orbitales se actualicen y esta información se transmite al segmento espacial por medio de estaciones de enlace de subida. Las correcciones emitidas al segmento espacial son correcciones de baja magnitud, necesarias para mantener a los satélites en sus orbitas. Un cambio de gran escala ocurre cuando un satélite falla y es necesario removerlo de su órbita para integrar su reemplazo.
mensajes con datos de navegación para determinar la solución de posición, velocidad y tiempo del usuario en tierra.
1.3 DETERMINACIÓN DE LA POSICIÓN A TRAVES DE LA MEDICIÓN
DE SEÑALES EMITIDAS POR LOS SATÉLITES
Para hacer que un receptor en tierra pueda determinar su posición este debe apoyarse en la medición de la distancia de por lo menos cuatro satélites tomados como puntos de referencia y de los cuales se conoce con certeza su posición. La distancia se determina midiendo el tiempo de llegada de las señales electromagnéticas emitidas por los satélites hacia el receptor. El vector r se asocia
a esta distancia la cual se obtiene a partir de multiplicar el Tiempo de llegada de la Señal emitida por el satélite GNSS (TOA por sus siglas en inglés) por la constante de la velocidad de la luz c. La posición del satélite se define a partir del centro de la Tierra y se obtiene a partir de los parámetros orbitales contenidos en el mensaje de navegación. La posición del satélite está definida por el vector s mostrado en la Figura 2. Finalmente tenemos a u, el cual es el vector desconocido y el cual se
[image:21.612.107.435.369.617.2]requiere determinar para obtener solución de la posición del receptor [3][4].
Figura 2 Configuración de usuario a satélite.
Trasladando este problema al modo geométrico, tenemos que:
Dado que no existe una sincronización entre el tiempo del sistema GNSS, el reloj del satélite y el reloj del receptor, se ve afectada por la medición del tiempo de llegada de la señal al receptor. También se afecta la medida de la magnitud del vector r, es decir, el cálculo de la distancia entre el satélite y el receptor en tierra. Por esta razón, la magnitud del vector r se declarada como seudorango (). Es necesario tomar en cuenta este desajuste entre los diferentes tiempos del sistema. La Tabla 1 y la Figura 3 muestran la definición de estos parámetros [5].
PARAMETROS DEFINICION
tsat Proporciona información del tiempo en que es emitida desde el satélite
la señal de navegación(es el tiempo del sistema GPS).
trec Es el tiempo medido a la llegada en el receptor de la señal de
navegación emitida desde el satélite
Δ tsat Esta es la diferencia entre el tiempo de la señal de reloj del satélite y el
tiempo del sistema GPS.
Δ trec Esta es la diferencia entre el tiempo del sistema GPS y el reloj del
receptor
Tabla 1 Definición de los parámetros de tiempos de emisión y llegada de la señal GPS y un receptor.[5]
Figura 3 Relación de los tiempos de emisión y arribo de las señales entre un satélite GPS y un receptor en Tierra.
Trasladando a coordenadas cartesianas a la ecuación 1.2, la posición del usuario definido como
[
]
y la posición del i-ésimo satélite se define como[
]
.
La ecuación 1.3 expresa el rango geométrico entre el receptor y el i-ésimo satélite.√ (1.3)
Para obtener la solución de la posición de manera tridimensional se requiere tener por lo menos cuatro puntos de referencia, es decir, cuatro satélites ( ).
√ (1.4)
√ (1.5)
√ (1.6)
√ (1.7)
El sistema de ecuaciones puede resolverse utilizando diversas técnicas, algunas de estas técnicas pueden realizarse por medio de métodos iterativos basados en la linealización del sistema o utilizando el algoritmo del filtro de Kalman [1]. Uno de estos métodos comunes de linealización es el de Mínimos Cuadrados. El sistema de ecuaciones se expresa de la siguiente manera:
(1.8)
En donde la solución de la posición del receptor se encuentra en evaluar a .
(1.9) [
]; H=[ ] [
];
La matriz H contiene los vectores unitarios de línea de vista hacia el satélite que
1.4 FUENTES DE ERROR
La estimación de la posición se encuentra afectada por cierta clase de errores. Estos errores generalmente se dividen en tres categorías: Errores que dependen de los satélites, errores que dependen del receptor en tierra y los errores que dependen del medio de propagación de las señales. Dentro de esta clasificación se encuentran concretamente implícitos los siguientes errores:
Errores efemérides de los satélites
Errores de reloj de los satélites
Retardo Ionosférico
Retardo Troposférico
Error de reloj del receptor
Multitrayectoria
Los errores de efeméride y reloj del satélite, los errores ocasionados por la propagación en la Ionosfera y la Troposfera están relacionados con respecto a una hora y son parcialmente corregidos por el usuario. Los errores debidos a la multitrayectoria están relacionados a una duración muy corta (unos cuantos segundos) y solamente se puede aligerar la amplitud de su impacto utilizando diferentes técnicas que pueden ser consultadas en [5].
Errores de efemérides de los satélites
La órbita de los satélites GNSS se describe principalmente por medio los seis parámetros orbitales de Kepler (semieje mayor, excentricidad, ángulo de inclinación, ángulo del nodo ascendente, argumento del perigeo, anomalía media). La influencia de la Tierra sobre la órbita de estos satélites provoca perturbaciones sobre esta, inclusive el roce de la atmosfera alta terrestre causa disminución en la velocidad de los satélites GNSS. Además debemos considerar las perturbaciones sobre la órbita que provocan otros cuerpos celestes.
Errores de reloj de los satélites
Retardo Ionosférico
La ionosfera es una región de la atmosfera terrestre comprendida entre una altitud de 50 Km y 1000 Km, en donde se encuentran presentes electrones libres. Conforme la señal GNSS atraviesa esta región, existen un retardo de una las componentes de la señal (retardo del seudorango), mientras que la fase de la portadora de la señal viaja con mayor velocidad (se adelanta la fase de la portadora). El viaje de las señales GNSS sobre esta región impacta en gran medida en la precisión del posicionamiento [5].
Retardo Troposférico
La troposfera terrestre es la región comprendida hasta una altitud de 50 Km. El retardo troposférico varía de acuerdo a la temperatura, presión atmosférica y nivel de humedad. Para el caso particular del GPS, este implementa diferentes modelos atmosféricos con el propósito de estimar el retardo troposférico.
Error de reloj del receptor
El oscilador utilizado para generar una réplica de la señal GNSS en receptor para los propósitos de adquirir la señal es generalmente un oscilador de Cuarzo. Debido a la naturaleza del Cuarzo, este material presenta una mayor inestabilidad para mantener el tiempo de referencia del GNSS. Por lo tanto los errores provocados por el reloj del receptor son generalmente mayores que los provocados por el reloj del satélite.
Multitrayectoria
1.4.1. SEUDORANGO Y LOS EFECTOS DE LAS FUENTES DE ERROR
Conjuntando todas las fuentes de error mencionadas, tenemos como resultado una expresión que incluye los errores efemérides/reloj [ ], retardos Ionosféricos [ ] y los retardos Troposféricos [ ], así como el ruido en el receptor y efectos de multitrayectoria (ambos efectos considerados en [ ]. Como resultado, el cálculo del seudorango incluyendo estos efectos mencionados se expresa de la siguiente forma:
[ ] (1.10)
Por medio de diversas técnicas se ha logrado compensar los efectos ocasionados en las señales. Estas correcciones emplean modelos y parámetros transmitidos por el sector de control para compensar los errores, pero las técnicas diferenciales son las que han logrado compensar considerablemente estos efectos [3].
1.5 GEOMETRÍA DE LOS SATÉLITES- DILUCIÓN DE LA PRECISIÓN
(DOP)
Los factores mencionados en el párrafo anterior introducen un error considerable en la estimación de la posición, y la geometría que forman los satélites utilizados para el posicionamiento puede magnificar estos errores externos. En los sistemas de navegación uno de los puntos importantes es la separación que existe entre los puntos de referencia considerados para realizar la solución de posicionamiento. La geometría que forman los satélites visibles es un factor muy importante para conseguir altos grados de precisión [17]. Esta geometría de los satélites cambia con el tiempo de acuerdo a las órbitas de los satélites. La Dilución de la Precisión
Figura 4 Dilución de la Precisión Geométrica
La interpretación geométrica del DOP puede verse como el volumen del cuerpo formado por los satélites y el receptor. Si el volumen de este cuerpo es muy grande como consecuencia tendremos una muy buena geometría, obteniendo un valor de DOP muy bajo lo cual es ideal.
El valor de DOP se multiplica por la incertidumbre en la medición del seudorango (conocida también como Error de Rango de Usuario Equivalente UERE) o definida también como la desviación estándar del seudorango medido ( ), con la finalidad de obtener el valor de error final en el posicionamiento [5]. Por ejemplo, para el caso del Error en la Posición Horizontal (HPE) esto es
. (1.11)
Los valores de DOP utilizados son los siguientes:
HDOP: Dilución de la Precisión Horizontal
VDOP: Dilución de la Precisión Vertical
GDOP: Dilución de la Precisión en la Posición y en el estado de Reloj
PDOP: Dilución de la Precisión en la Posición
TDOP: Dilución de la Precisión en el Tiempo
Latitud=0° Latitud=30° Latitud=60° Latitud=90°
GDOP 1.78 1.92 1.84 2.09
PDOP 1.61 1.71 1.65 1.88
HDOP 0.80 0.93 0.88 0.75
VDOP 1.40 1.43 1.40 1.73
TDOP 0.76 0.88 0.80 0.90
Tabla 2 Valores promedio de DOP para la constelación GPS [5].
1.6 TECNICAS DIFERENCIALES
El objetivo de las técnicas diferenciales, como en el caso del GPS Diferencial (DGPS), es remover los errores entre dos o más receptores que tienen a la vista los mismos satélites GPS. Esto se logra realizar estableciendo a uno de los receptores como estación de referencia colocado en una posición fija y conocida. Las mediciones del seudorango que realiza la estación de referencia se comparan con la posición fija de la estación, la estación calcula las diferencias y las establece como las correcciones del seudorango. Estas correcciones son emitidas vía radio a la región circundante a la estación de referencia, en donde se encuentra el otro receptor, el cual toma estas correcciones del seudorango para ajustarlas a su cálculo de posicionamiento, y como resultado obtiene una mejora en la precisión en su posicionamiento. La Figura 5 muestra la configuración de esta técnica. A pesar de que este método ofrece una mayor precisión en el posicionamiento, no logra contrarrestar los efectos relacionados al ruido interno en los receptores o los efectos de multitrayectoria. Además, en el momento en el que el receptor circundante se aleja considerablemente de la estación de referencia, las correcciones del seudorango emitidas por la estación de referencia pierden validez debido a los errores ocasionados por condiciones atmosféricas y la diferencia de visibilidad de satélites entre la estación de referencia y el receptor móvil.
Esta separación espacial provoca diferencias entre las componentes de los errores determinados por la estación de referencia y los calculados por el usuario receptor, estas diferencias pueden calcularse utilizando algunas expresiones apropiadas o algunos modelos [2][4].
Figura 5 Esquema de Funcionamiento de un sistema GPS Diferencial
1.6.1. WADGPS
En aquellas regiones donde existe una separación espacial extensa puede mejorarse la precisión diseñando una red sofisticada de estaciones de referencia. Con este antecedente se hace el planteamiento de un sistema de DGPS de área amplia (WADGPS).
El sistema WADGPS está dirigido a mejorar el servicio de posicionamiento estándar proporcionado por GPS. Lo que realiza un WADGPS es proporcionar un vector de corrección de errores compuesto por un error de efemérides tridimensional y un desajuste de reloj para cada satélite, junto con parámetros de retardo ionosférico y retardo troposférico.
Las correcciones principales que realiza el sistema WADGPS son básicamente de dos tipos: correcciones de efemérides/reloj de los satélites y las correcciones de retardo ionosférico [2].
La teoría expuesta en este capítulo permitió obtener un panorama general del funcionamiento de los GNSS, en forma particular, como se realiza el posicionamiento por medio de la medición de señales emitidas desde satélites y los factores que disminuyen la calidad del posicionamiento. También se realizó la introducción de las técnicas utilizadas para disminuir los efectos negativos al posicionamiento.
En el capítulo 3 se abordarán los sistemas de mejora al GNSS que actualmente se encuentran en operación en varias regiones del planeta. Estos sistemas fueron desarrollados para su aplicación en la navegación aérea.
CAPITULO 2 -
SISTEMAS DE NAVEGACIÓN
AÉREA
2.1 INTRODUCCIÓN
Un sistema de navegación proporciona las funciones de estimación de posición, definición de trayectoria, dirección de trayectoria e indicaciones de situación y alertas a la tripulación de vuelo.
Los métodos de navegación se basan en el uso de equipos y sistemas que utilizan ondas de radio y técnicas electrónicas.
Existen tres tipos de sistemas de navegación; Sistemas emplazados en tierra, Sistemas de Navegación Satelitales y Sistemas de Navegación Inerciales [16]. Los sistemas de navegación aérea emplean el uso de conceptos propios al sector aeronáutico, los cuales se emplean para la evaluación de los sistemas que apoyan esta actividad en las diferentes fases de vuelo. Es necesario comprender estos conceptos para su posterior aplicación en la evaluación de operaciones de navegación bajo el uso de GNSS.
SISTEMAS EMPLAZADOS EN TIERRA
Basan su funcionamiento en estaciones emplazadas en tierra, las cuales emiten señales de radio que son captadas por sensores instalados en las aeronaves. Dentro de estos sistemas conocidos como Radioayudas para la Navegación (NAVAIDS por sus siglas en inglés) se encuentran:
NDB (Non Directional Beacon, Radiofaro no Direccional)
ILS (Instrument Landing System, Sistema de Aterrizaje por Instrumentos) VOR (VHF Omnidireccional Range, Radiofaro Omnidireccional en VHF) DME (Distance Measuring Equipment, Equipo de Medición de Distancia) LORAN (Long Range Navigation, Navegación de Largo Alcance)
Radiobalizas
SISTEMAS DE NAVEGACIÓN POR SATÉLITE
Basan su funcionamiento en la medición de señales emitidas por satélites que orbitan alrededor de la Tierra. Entre los más conocidos se encuentran:
Sistema de Posicionamiento Global (GPS)
Sistema Orbital de Navegación por Satélite (GLONASS)
Galileo (Sistema de Navegación Satelital impulsado por la Unión Europea)
SISTEMAS DE NAVEGACIÓN INERCIALES
Son sistemas instalados en las aeronaves los cuales basan su funcionamiento en las fuerzas de inercial proporcionando información de posición al avión y parámetros de dirección, velocidad del viento y demás parámetros adicionales. El aprovechamiento de estos sistemas se da cuando las aeronaves sobrevuelan el océano y no se dispone de la cobertura terrestre de las radioayudas. Aunque han sido mejorados con los avances tecnológicos estos siguen menos precisos en comparación a los sistemas de emplazados en tierra.
2.2 REQUISITOS DE DESEMPEÑO DE LOS SISTEMAS DE
NAVEGACIÓN
Entre los requerimientos que la Organización de Aviación Civil Internacional (OACI) exige a los sistemas de navegación se encuentran: la exactitud, la disponibilidad, la integridad y continuidad. Dependiendo de cuales o cuantos requerimientos cumpla un sistema de navegación podrá ser categorizado como: medio único, medio primario, medio suplementario.
La definición de estos requerimientos es la siguiente:
La exactitud significa el nivel de conformidad entre la posición estimada de una aeronave y su posición verdadera.
La disponibilidad es la porción de tiempo durante el cual el sistema cumple con los requisitos de desempeño bajo ciertas condiciones.
La integridad es la función de un sistema que advierte a los usuarios de una manera oportuna cuando no debe ser utilizado dicho sistema.
La continuidad es la probabilidad que un sistema seguirá disponiéndose durante una fase determinada.
Medio suplementario.- Sistema de navegación que debe utilizarse conjuntamente con un sistema certificado como medio único. Debe satisfacer los requisitos de exactitud y de integridad para una determinada operación o fase de vuelo, pero no es necesario satisfacer los requisitos de disponibilidad y continuidad.
Medio principal.- Sistema de navegación aprobado para determinada operación o fase de vuelo que debe satisfacer los requisitos de exactitud y de integridad pero no es necesario que satisfaga los requisitos de plena disponibilidad y continuidad del servicio. Se mantiene la seguridad limitando los vuelos a periodos específicos de tiempo, y mediante restricciones reglamentarias apropiadas.
Medio Único.- Sistema de navegación para determinada operación o fase de vuelo que debe posibilitar satisfacer, en dicha operación, los cuatro requisitos de desempeño.
Los sistemas GNSS se están desarrollando paso a paso para ser los medios primarios de navegación [12].
2.3 SISTEMAS CNS/ATM
Los esfuerzos por parte de la OACI para atender las necesidades de la industria de la aviación civil internacional se dirigen en coordinar los procesos de planificación mundial, en apoyo a los sistemas de Administración de Tráfico Aéreo (ATM) globales, como parte del proceso evolutivo del concepto de sistema de Comunicaciones, Navegación, Vigilancia/Administración del Tráfico Aéreo (CNS/ATM).
Los sistemas CNS/ATM (Comunicaciones, Navegación y Vigilancia/ Administración del Tránsito Aéreo) son sistemas de comunicaciones, navegación y vigilancia, que utilizan tecnologías digitales, entre ellas sistemas por satélites, junto con diversos niveles de automatización, en apoyo de un sistema mundial de gestión del tránsito aéreo.
El elemento de navegación de los sistemas CNS/ATM está destinado a suministrar una función de determinación de la posición precisa, fiable y continua en todo el mundo, mediante la introducción de la navegación aeronáutica por satélite.
Comunicaciones Navegación Vigilancia Gestión del Tránsito Aéreo
Datos VHF HF Modo S SATELITE ATN Voz
VHF SATELITE
GNSS GPS GLONASS Aumentación
ABAS GBAS SBAS
SSR
Modos A/C Modo S ADS
VHF HF Satélite ADS-B
ASM
RNP RNAV
Utilización del espacio aéreo ATS
Normas de separación Sistemas de
automatización ATFM
Planificación Coordinación Tabla 3 Elementos del sistema CNS/ATM.
2.3.1. ENFOQUE DE LA IMPLANTACIÓN
Existen tres enfoques básicos en relación con el establecimiento y gestión de los sistemas CNS/ATM. Estos pueden agruparse como sistemas nacionales, regionales y mundiales. Es posible optar por una combinación de estos enfoques, dependiendo de los distintos entornos.
En cada uno de los posibles enfoques para la implantación de sistemas CNS/ATM, se puede cumplir la función recurriendo a proveedores, sean éstos públicos o privados. Para cada categoría o sector, es requisito básico que el servicio proporcionado se ajuste a las normas y métodos recomendados por la OACI y otras disposiciones aplicables del derecho internacional; además, su funcionamiento debe ser coordinado con otras categorías y sectores [16].
2.3.2. VENTAJAS DE LOS SISTEMAS CNS/ATM
Comunicaciones: Mejorar la cobertura accesibilidad, capacidad, integridad, seguridad y rendimiento de los sistemas de comunicación aeronáutica de conformidad con los requisitos ATM.
Navegación: Mejorar la cobertura y permitir la capacidad de navegación en todo tiempo y en todos los espacios aéreos, incluyendo la aproximación y el aterrizaje, manteniendo a la vez los niveles de integridad adecuados y la precisión.
2.4 NAVEGACIÓN DE AREA (RNAV)
La navegación de aeronaves ha estado limitada por la ubicación de ayudas a la navegación basadas en tierra (NAVAIDs). Esto se ilustra en la Figura 6.
La Navegación de Área (Area Navigation, RNAV) es un método de navegación que permite que una aeronave se desplace en cualquier trayectoria deseada, sin la necesidad de pasar sobre puntos predefinidos por la existencia de radioayudas en tierra.
Figura 6 Beneficios de las rutas RNP RNAV.
Este tipo de operación se realizará dentro del área de cobertura de las radioayudas utilizadas como puntos de referencia o dentro de los límites de la capacidad de los sistemas de navegación autónomos (como los sistemas inerciales), o una combinación de ambos.
2.5 NAVEGACION BASADA EN DESEMPEÑO (PBN)
El concepto de PBN especifica que los requisitos de desempeño del sistema de Navegación de Área (RNAV) de las aeronaves están definidos en función de la precisión, integridad, disponibilidad, continuidad y funcionalidad necesarias para las operaciones propuestas para el espacio aéreo, esto con el apoyo de la infraestructura de navegación adecuada. PBN representa un cambio de navegación basada en sensores a navegación basada en el desempeño. El concepto de Navegación Basada en Desempeño se funda en el uso de un sistema de navegación de área (RNAV).
La PBN ofrece varias ventajas:
Reduce la necesidad de mantener rutas y procedimientos en función de sensores específicos, y los costos conexos.
Evita tener que desarrollar operaciones en función de los sensores que evolucionan con los sistemas de navegación.
Permite un uso más eficiente del espacio aéreo
Facilita el proceso de aprobación operacional de los explotadores, proporcionando un conjunto limitado de especificaciones para la navegación previstas para uso mundial.
La PBN provee una base sencilla para el diseño e implantación de trayectorias de vuelo automatizadas y para el diseño del espacio aéreo, separación de aeronaves y libramiento de obstáculos. Adicionalmente, provee un medio directo para comunicar las capacidades operacionales y de desempeño necesarias para la utilización de tales trayectorias y espacio aéreo.
2.6 DESEMPEÑO REQUERIDO PARA NAVEGACIÓN (RNP)
El establecimiento de un conjunto de reglas para la navegación aérea implica, necesariamente, que las aeronaves que vuelan siguiendo estas reglas deben poseer un conjunto mínimo de prestacionespara ser capaces de cumplirlas.
El Desempeño Requerido para Navegación (RNP) se define como la exactitud de las prestaciones de navegación requeridas para poder operar dentro de un espacio aéreo determinado.
Para determinar estos requisitos en las prestaciones primero se define un objetivo de seguridad que se desea alcanzar. Este objetivo de seguridad puede interpretarse como una región de confinamiento dentro de la cual la aeronave debe ser capaz de mantenerse durante su vuelo. Hay diferentes tipos de RNP, definidos en función del tamaño de esta región de confinamiento [12].
2.6.1. PRECISION DE NAVEGACION
En el contexto de la RNP, la precisión del desempeño de navegación define la precisión total de navegación basándose en la combinación del error del sensor de navegación, del error del sensor de abordo, del error de presentación en pantalla y el error técnico de vuelo en el plano horizontal, es decir, la determinación de la posición lateral y longitudinal. La precisión se expresa como un parámetro único, el cual define la distancia desde las posiciones previstas dentro de las cuales los vuelos se encontrarían durante al menos 95% del tiempo total de vuelo, tal como se muestra en la Figura 7. Para fines de planificación del espacio aéreo, el área de retención puede ser considerada como la región confinada por líneas que marcan el límite (línea color amarillo en la Figura 7).
Figura 7 Concepto de RNP
2.6.2. APLICACIÓN Y SELECCIÓN DE LOS TIPOS DE RNP
Cuando corresponda, los tipos de RNP se prescribirán de conformidad con los acuerdos regionales de navegación aérea. La RNP puede aplicarse a una o más rutas de Servicio de Tráfico Aéreo (ATS) permanentes y publicadas, así como a las rutas contingentes, dentro de un espacio aéreo, y también podría aplicarse a un espacio aéreo definido, así como a aéreas designadas y publicadas que permiten operaciones con rutas aleatorias. Idealmente, se definiría un tipo de RNP específico para un espacio aéreo determinado. Sin embargo, también pueden combinarse diferentes tipos de RNP dentro de un espacio aéreo general. La Tabla 4 muestra la clasificación de los tipos de RNP definidos por la OACI.
Tipo de RNP Aplicación
1.0 MN Salida
0.5 MN Únicamente aproximación inicial, salida
0.3 MN Únicamente aproximación inicial,
intermedia y final, salida
<0.3 MN No aplicable
Tabla 4 Tipos de RNP definidos por la OACI [6].
El nivel requerido de desempeño de navegación será diferente en distintas áreas, dependiendo de factores tales como la densidad de tránsito y la complejidad de las estructura de las rutas.
2.7 GNSS Y SU APLICACIÓN EN LA AERONÁUTICA CIVIL
Los sistemas de navegación por satélite están considerados por la aviación civil como la solución más eficaz para hacer frente al aumento en el crecimiento del tráfico aéreo, al optimizar los recursos accesibles a las compañías aéreas y mejorar la calidad de servicio, en particular la puntualidad. Es importante sustituir las ayudas tradicionales (y en algunos casos obsoleta) instalada en tierra, simplificar las arquitecturas aviónicas y alcanzar ahorros de explotación del espacio aéreo.
En el ámbito de la aviación civil, los sistemas de navegación por satélite tomarán el relevo de los sistemas de radio ILS (Sistema de Aterrizaje por Instrumentos), utilizados en todo el mundo. Su utilización presenta muchas ventajas: mayor seguridad, gran disponibilidad y reducción de la distancia entre dos aviones en vuelo, lo que permite el aumento del tráfico aéreo. La optimización de los perfiles de vuelo permitirá ahorrar combustible, reducir el tiempo de vuelo y disminuir el ruido en las inmediaciones de los aeropuertos gracias a los acercamientos de trayectoria curva, imposibles con los sistemas tradicionales.
CAPITULO 3 -
SISTEMAS DE AUMENTACIÓN
3.1 INTRODUCCIÓN
Los sistemas GPS y GLONASS en forma independiente o en combinación no cumplen con la precisión, disponibilidad y continuidad indispensables para la navegación aérea segura. Como se presentó en el capítulo 1, los desarrollos en GPS Diferencial han logrado mejorar los aspectos de la señales GNSS buscando brindar la seguridad para las distintas operaciones de navegación aeronáutica. Esto ha traído como consecuencia el desarrollo de sistemas de aumentación, en especial los Sistemas de Aumentación Basados en Satélite (SBAS), los cuales forman parte del Sistema Mundial de Navegación por Satélite. El presente capítulo brinda un panorama general de los sistemas de aumentación que actualmente se encuentran desplegados. Algunos de estos sistemas son: Sistemas de Aumentación Basados en Tierra (GBAS), Sistemas de Aumentación Basados en Aeronave (ABAS) y Sistemas de Aumentación Basados en Satélites (SBAS). Este capítulo también aborda lo referente a las correcciones realizadas por los sistemas de aumentación con la finalidad de hacer segura la navegación con GNSS. Las correcciones de efeméride/reloj y las de retardo ionosférico son generadas por los sistemas de aumentación y estas ayudan a obtener los parámetros necesarios para determinar el desempeño de navegación requerido en operaciones bajo GNSS.
3.2 LIMITES ASOCIADOS AL GNSS
El GNSS ofrece beneficios importantes a la navegación, sin embargo esta tecnología presenta algunas limitaciones para los requerimientos de desempeño establecidos por la OACI. Los Estados que se están dirigiendo a la aprobación de operaciones bajo GNSS deben considerar todas las limitantes. Para ser eventualmente utilizados por la aviación civil, GPS y GLONASS presentan insuficiencias de tres tipos: exactitud, disponibilidad e integridad.
Exactitud de la posición normalizada para GPS (SPS) L1: La exactitud de la posición SPS del GPS no excederá los límites establecidos en la Tabla 5.
En cuestión de la integridad los sistemas GPS y GLONASS pueden verse afectados por averías en la señal de navegación siendo inutilizable por el usuario, lo que puede llevar a situaciones críticas, en particular en fase de aproximación y aterrizaje. Es necesario tomar en cuenta estos eventos y las posibles fuentes de interferencia que afecten a los GNSS [6].
Promedio mundial 95% del tiempo
Peor ubicación 95% del tiempo
Error de posición Horizontal GPS
13 metros 36 metros
Error de posición Vertical GPS
22 metros 77 metros
Error de posición Horizontal GLONASS
19 metros 44 metros
Error de posición Vertical GLONASS
29 metros 93 metros
Tabla 5 Exactitud del Servicio de Posicionamiento estándar ofrecido por los GNSS [6].
3.3 OPERACIÓNES BASADAS EN GNSS
Los GNSS al tener una orientación global ofrecen mayores ventajas respecto a las radioayudas tradicionales (NAVIADS). Esto podría eliminar la necesidad de tener instalado una extensa infraestructura en tierra y de equipamiento actualmente utilizado en las aeronaves para alcanzar los requerimientos necesarios para sus operaciones.
Los GNSS ofrecen servicio de posicionamiento en las regiones oceánicas, lo cual difícilmente se lograría con los NAVAIDS. También apoyan las operaciones de navegación aérea permitiendo a las aeronaves volar en trayectorias de vuelo con mayor eficiencia.
Los GNSS pueden mejorar las capacidades de uso de las terminales aéreas, esto sin la necesidad de utilizar un extenso número de radioayudas tradicionales. Mejoran la capacidad de algunas operaciones tales como las Aproximaciones con Guía Vertical (APV) en todas las pistas de aterrizaje.
Servicios de navegación existentes
Disponibilidad de criterios de diseño para operaciones con GNSS
Nivel de servicios de tráfico aéreo apoyados por operaciones GNSS
Infraestructura Aeroportuaria
Equipamiento de las Aeronaves
Regulaciones
Dependiendo de estos factores, los Estados pueden adoptar diferentes implementaciones estratégicas derivando en beneficios para las diferentes etapas de implementación.
La introducción de los sistemas de aumentación mejoran el servicio y reducen las limitantes que presentan los sistemas navegación tradicionales. Dependiendo del volumen de tráfico y de la infraestructura aeroespacial, los Estados pueden seleccionar el grado de participación para el desarrollo o implementación de los sistemas de aumentación. Estas implementaciones requieren altos niveles de cooperación entre varios Estados con el propósito de obtener las máximas ventajas operacionales para los operadores de tráfico aéreo [13].
3.4 SISTEMA DE AUMENTACIÓN BASADOS EN SATELITES (SBAS)
Es un sistema de seguridad de alto nivel de desempeño diseñado para aumentar la señal de servicio de los GNSS. Los SBAS mejoran estos servicios proporcionando:
Un punto de referencia adicional, el cual es un satélite geoestacionario, y como resultado proporciona una fuente de rango adicional al sistema GNSS, obteniendo una mejora de la disponibilidad y confiabilidad de las señales GNSS.
Correcciones de las señales GNSS, mejorando la precisión.
Monitoreo de la Integridad, mejorando la seguridad.
Por lo tanto, la misión primordial de los SBAS es la de proporcionar apoyo a los servicios de navegación aérea en todas las fases de vuelo. Las funciones principales de los SBAS se mencionan a continuación:
Determinación de las correcciones ionosféricas
Determinación de los errores en las órbitas satelitales
Determinación de las correcciones de reloj de los satélites
Determinación de la Integridad de los datos en los satélites
Verificación de datos
Un sistema SBAS consiste en un conjunto de estaciones de referencia instaladas en una región continental, una estación concentradora (estación maestra), un sistema de enlace ascendente y satélites geoestacionarios. Las estaciones de referencia captan las señales GNSS y cada observación se envía a la estación maestra. La estación maestra procesa los datos y determina la integridad de la señal, las correcciones de la señal y errores residuales para cada satélite monitoreado. Esta información se envía al sistema de enlace ascendente el cual transmite la información a los satélites geoestacionarios. Los satélites retransmiten esta información que contiene las correcciones y mensajes de integridad modulada en la misma banda de operación del GNSS (por ejemplo, L1 de GPS) sobre la región a la cual fue orientado el sistema de aumentación. El receptor recibe estos mensajes en conjunto con los mensajes recibidos por la constelación GNSS y por medio de comparaciones estos reducen el error en su posición y en tiempo. La Figura 8 muestra como está integrado un SBAS [1].
3.5 SISTEMAS DE AUMENTACION BASADOS EN TIERRA (GBAS)
Estos sistemas comenzaron a partir de buscar mejoras en el servicio de posicionamiento del GPS por medio de infraestructura instalada en tierra. Estos elementos instalados en tierra se denominan seudolitos, en referencia a que simulan un satélite GPS. Con los seudolitos ubicados en una posición conocida en tierra y generalmente instaladas en las proximidades de los aeropuertos, se consiguen mejoras de los precisión, integridad y disponibilidad del servicio, ya que las correcciones emitidas se hacen en la frecuencia de operación de GPS.
Un GBAS funciona de la siguiente manera: Un conjunto de tres o cuatro estaciones de referencia desplegadas en un área relativamente pequeña y generalmente en las proximidades de un aeropuerto. Estas estaciones monitorean las señales de navegación de los satélites y envían las mediciones de seudorango a la instalación de procesamiento central.
La central de procesamiento utiliza esas observaciones de seudorango provenientes de las estaciones de referencia y calcula las estimaciones de corrección del seudorango para cada señal proveniente de un satélite GNSS. La Central de Procesamiento también monitorea la integridad de la señal y calcula los parámetros de integridad para cada satélite con el propósito de que el usuario los utilice para determinar la disponibilidad de la señal. Las estaciones también monitorean la operación de los satélites SBAS, en donde la central de procesamiento también procesa el rango de estos satélites SBAS para realizar las correcciones. La Central de Procesamiento no toma en cuenta son los mensajes de integridad de los SBAS.
Figura 9 Diagrama esquemático de un Sistema de Aumentación Basado en Tierra.
3.5.1. OPERACIONES GBAS
Una instalación de GBAS proporcionará normalmente correcciones que apoyan aproximaciones a pistas múltiples en un aeropuerto único. En algunos casos, los datos pueden utilizarse también para aeropuertos y helipuertos cercanos. La infraestructura GBAS comprende equipo electrónico que puede instalarse en cualquier edificio adecuado del aeropuerto así como antenas para la radiodifusión de datos y recepción de señales de satélite. El emplazamiento de las antenas es independiente de la configuración de la pista pero exige una cuidadosa evaluación de las fuentes locales de interferencia, bloque de señales y multitrayectos. El emplazamiento de la antena de radiodifusión de datos VHF debería asegurar que la zona de cobertura es suficiente para las operaciones previstas.
La complejidad y redundancia de la instalación terrestre GBAS depende del servicio a proporcionar.
general de un Sistema de Aumentación de Área Local (LAAS). Una comparativa entre un SBAS-WAAS y un GBAS se presenta en la Figura 10, en donde se muestra las operaciones y capacidades de apoyo para cada sistema.
Figura 10 Entornos de aplicación de SBAS y GBAS.
3.6 SISTEMAS DE AUMENTACION BASADOS EN AERONAVE (ABAS)
La aumentación e integración de información por medio de un receptor GNSS y un conjunto de sensores instalados en las aeronaves nos conduce al concepto de Sistema de Aumentación Basado en Aeronave (ABAS). Un ejemplo de estos sistemas es el Receptor Autónomo de Monitoreo de la Integridad (RAIM), en el cual se integran los sistemas GNSS y los Sistemas de Navegación Inercial (INS). El desempeño de estos sistemas mejora al aplicar el concepto de Monitoreo de la Integridad Autónomo en la Aeronave (AAIM), en el cual se utiliza información provenientes de los satélites GNSS y de otras fuentes de información de navegación como lo pueden ser DME, VOR, LORAN-C, Omega, INS, relojes de precisión y de sensores aerodinámicos y termodinámicos. El RAIM solamente verifica si la información de los satélites GNSS que está recibiendo son confiables, en caso contrario, descarta ese satélite o al conjunto de satélites que está fallando emitiendo una alerta al operador de la aeronave que utilice otro sistema de apoyo a la navegación.
GNSS con un barómetro se incrementa la disponibilidad promedio del monitoreo de la integridad en un 100%.
La aplicación de estos sistemas se encuentra principalmente en las regiones donde no se cuenta con alguna radioayuda a la navegación o en las regiones cercanas a los polos terrestres donde difícilmente llega la cobertura de un satélite geoestacionario [1].
3.7 MODELADO DE UN SISTEMA DE AUMENTACIÓN
La disponibilidad evaluada dentro de una región de servicio depende de conjuntar todos los parámetros de desempeño requeridos para alcanzar las necesidades de navegación segura (Precisión, integridad, continuidad).
El Modelo de Volumen de Servicio (SVM) busca la capacidad de obtener un conjunto óptimo de requerimientos sobre el área de servicio planeada. Esto permite realizar un análisis de desempeño partiendo de análisis y mediciones de límites de protección definidos para operaciones bajo GNSS orientado a una operación de navegación aérea.
Uno de los usos inmediatos del SVM es realizar un análisis de desempeño buscando si la configuración actual proporciona la disponibilidad requerida para operaciones aeronáuticas En Ruta-Aproximación sin Precisión (ER-NPA) o las Aproximaciones con Precisión (PA).
El SVM se apoya en el modelado de la geometría y los aspectos de confiabilidad física de sistemas SBAS y GBAS. Un entendimiento de los modelos tiene un papel importante en la predicción de la disponibilidad de servicio dentro de un modelo de servicio deseado para un instante de tiempo.
La disponibilidad del sistema de aumentación depende de la estimación de dos parámetros:
Rango de Error Diferencial de Usuario UDRE (User Differential Range Error)
Error Vertical de Mallado Ionosférico GIVE (Grid Ionospheric Vertical Error) El UDRE está orientado a limitar los errores calculados de las correcciones de efemérides y de reloj de los satélites.
El GIVE se encuentra orientado a limitar el error ocasionado por el retardo de la señal al atravesar la ionosfera.
analista puede seleccionar las constantes o los modelos utilizados en los valores de UDRE y GIVE, los cuales están basados en el conocimiento de los límites de error respectivos a lo largo del volumen de servicio. El modelo manejado en los algoritmos de estimación del UDRE y el GIVE, modela la distribución del error cercano a esos valores, y tienden a ser más confiables al desempeño que presente el sistema.
Un aspecto importante en el Modelo de Volumen de Servicio es que tiene la capacidad de predecir la disponibilidad del sistema tomando en cuenta la confiabilidad, sostenibilidad y disponibilidad de todos los elementos que constituyen al sistema.
Los SVM se implementan como herramientas informáticas con el propósito de evaluar el desempeño de los sistemas de aumentación.
3.8 CORRECCIONES IONOSFÉRICAS
La ionosfera es una de las principales fuentes de error que afecta a los sistemas de navegación basados en satélites. La ionosfera es una capa de electrones libres y átomos cargados eléctricamente que rodean a la Tierra, en una región conformada entre los 50 Km y los 1000 km. La existencia de esta capa se debe principalmente a la radiación ultravioleta proveniente del Sol.
Los electrones libres presentes en la ionosfera afectan la propagación de las ondas de radio. La velocidad de propagación de una onda de radio al ingresar a la ionosfera se determina por la densidad de electrones presentes en el punto de ingresó de la señal. La velocidad de una señal portadora se incrementa por la presencia de estos electrones, o sea que entre mayor cantidad de electrones libres se encuentren presentes mayor será la velocidad de la señal. El efecto neto sobre la onda de radio se obtiene al integrar la densidad de electrones a lo largo de la trayectoria de la señal, es decir del satélite hacia el receptor [15]. La ionosfera es un medio dispersivo, las señales moduladoras y la portadora se encuentran sujetas a diferentes cantidades de retardo. El retardo de grupo en las señales GNSS introduce un error dentro de las mediciones de rango. El margen de error resultante ocasionado por la ionosfera puede variar entre 1 metro hasta más allá de 100 metros existiendo cambios en el transcurso del día, dependiendo de la estación del año, de la localización del receptor sobre la superficie terrestre, dirección de vista y del estado del campo magnético terrestre [15].
En aplicaciones críticas como la navegación aérea, se emplean métodos con mayor sofisticación para las correcciones del retardo ionosférico. Estos algoritmos deben proporcionar en todo el tiempo y sobre la región de interés estimaciones del retardo vertical ionosférico y limitar los posibles errores de estas correcciones. El modelo generalmente utilizado para la estimación del retardo ionosférico se encuentra basado en un modelo ionosférico de capa delgada, pasando de un plano tridimensional de la ionosfera a un modelo bidimensional. La ionosfera se modela como una superficie que rodea a la Tierra, en donde se toma una altura generalmente de 350 Km en la cual se considera que la ionosfera tiene una mayor concentración [21]. Sobre este modelo bidimensional se proyectan puntos separados de forma regular (generalmente 5°x5°) formando una malla, en la que cada punto de esta malla contiene una estimación del retardo ionosférico. Estos puntos son llamados Puntos de Mallado Ionosférico (IGP).Un ejemplo de este tipo de mallado se muestra en Figura 11
,
donde se presenta el modelo de mallado ionosférico con el que opera el sistema WAAS en la región Norte del continente americano. Se observa que en la malla está compuesta por puntos separados cada 5°, excepto para las latitudes altas (cercano al Polo Norte) donde existe una separación mayor entre los puntos [23].En los sistemas de aumentación basados en satélite las correcciones del retardo ionosférico se realizan de la siguiente forma: Los datos contenidos en la señal GNSS se recolectan por la red de estaciones de referencia y son filtradas para su posterior envío a la estación maestra. Estos datos son respecto a la trayectoria inclinada con la que ingresa la señal desde el satélite hacia la estación de referencia. Al punto en la cual esta trayectoria inclinada toca a la malla ionosférica se le denomina Punto de Penetración Ionosférica (IPP por sus siglas en inglés) y esto se muestra en la Figura 12. La estación maestra toma esta información y realiza la conversión del retardo de la trayectoria de ingreso de la señal GNSS a retardo vertical ionosférico a partir de los puntos de penetración ionosféricos. Realizando esta tarea, las mediciones ionosféricas son independientes del ángulo de elevación, haciéndolas más convenientes para ser utilizadas [14].
Figura 12 Punto de Penetración Ionosférica
Con el retardo ionosférico vertical y junto con el modelo de malla ionosférica se realiza la estimación del retardo ionosférico ̂ para cada punto IGP.
PARAMETRO SIGNIFICADO
ωi Peso en el i-ésimo punto de medición IPP
IKlobuchar,G Retardo ionosférico vertical en el punto de
la malla utilizando los parámetros del modelo Klobuchar
Imedido,i Retardo ionosférico vertical medido en el
punto de penetración
IKlobuchar,i Retardo ionosférico vertical en el punto de
penetración utilizando los parámetros del modelo Klobuchar
Tabla 6 Significado de los parámetros de la ecuación 3.1.
El peso se calcula con la expresión 3.2.
(3.2)
Donde σi es la varianza del i-ésimo retardo vertical ionosférico medido. El parámetro es una función de correlación de distancia de la ionosfera.
Los sistemas de aumentación transmiten a los usuarios las correcciones del retardo ionosférico, en donde estos últimos emplean métodos de interpolación entre los retardos en los puntos IGP y sus puntos IPP.
Otro punto importante es el determinar el grado de error remanente en las correcciones del retardo ionosférico. Este grado de error se encuentra definido por el Error Vertical de Mallado Ionosférico (GIVE por sus siglas en inglés) y el cual es un valor real. El GIVE se calcula para cada punto IGP en donde el error remanente en las correcciones debe mantenerse por debajo de un umbral el 99.9% de los casos. El GIVE ayuda a determinar la integridad alcanzada del sistema de aumentación para su uso en la navegación. La forma de realizar su cálculo se define en la ecuación 3.3.
∑
(3.3)La estimación del retardo ionosférico es una de las partes más importantes en los sistemas de aumentación de área amplia del GNSS. Incrementos no detectados en los retardos ionosférico podrían conducir al segmento de usuarios a situaciones riesgosas.
La ionosfera terrestre se ve afectada por ráfagas de radiación electromagnética provenientes del Sol, las cuales energizan a las partículas presentes en la ionosfera. La radiación electromagnética de gran intensidad es causada principalmente por la actividad solar tales como son la aparición de manchas solares, llamaradas y eyecciones de masa de la corona solar. A mayor energía emitida por el Sol, mayores serán los retardos ionosféricos. La actividad solar de mayor intensidad se presenta generalmente en ciclos de 11 años.
La influencia de la actividad solar en los GNSS tiene mucha importancia ya que se espera un máximo solar en el año 2013 [22]. Si se presentan retardos ionosférico de gran magnitud entonces se presentarán mayores amenazas a la seguridad en el posicionamiento y en sistemas sincronizados atreves del GNSS. Para esto casos toma mayor importancia realizar la estimación del retardo ionosférico en tiempo real.
Además de la variabilidad en periodos grandes ocasionada por la actividad solar, la ionosfera también muestra variabilidad de periodos corto provocados principalmente por llamaradas solares, tormentas ionosféricas, centelleos y las Perturbaciones Ionosféricas Viajeras (TIDs por sus siglas en inglés). Dentro de estos factores de corto plazo las TIDs son las que se observan en la mayoría de las mediciones realizadas por los GNSS. Las TIDs son ocasionadas por ondas gravitacionales que modifican la densidad de electrones en la ionosfera. Las ondas gravitacionales son generadas por perturbaciones en la corriente aural y procesos relacionados con la convección de campos eléctricos [22]. Las TIDs muestran formas de ondas con amplitudes de gran magnitud. Se ha reportado que las TIDs de gran intensidad se presentan en periodos mayores a una hora, y TIDs de mediana intensidad tienen periodos muy cortos con longitudes de onda de 100 y 300 Km.Sin embargo, no se han realizado la modelización para la corrección de los efectos de las TIDs, un fenómeno que impacta limitando la distancia de servicio en las estaciones de referencia.