Protocolo de colaboración entre robots autonomos
115
0
0
Texto completo
(2) INSTITUTO POLITECNICO NACIONAL SECRETARÍA DE INVESTIGACIÓN Y POSGRADO. CARTA DE CESIÓN DE DERECHOS. En la Ciudad de México, Distrito Federal el día 7 del mes de Enero del año 2013, el que suscribe Jesús Arturo Galicia Mejía alumno del Programa de Maestría en Ciencias en Ingeniería de Telecomunicaciones con número de registro B102130, adscrito a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco, manifiesta que es autor intelectual del presente Trabajo de Tesis bajo la dirección del Dr. Felipe Rolando Menchaca García y el M en C. Miguel Sánchez Meraz y cede los derechos del trabajo intitulado Protocolo de Colaboración entre Robots Autónomos, al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación. Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del autor y/o directores del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección [email protected]. Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.. Jesús Arturo Galicia Mejía.
(3) INSTITUTO POLITECNICO NACIONAL SECRETARÍA DE INVESTIGACIÓN Y POSGRADO. CARTA DE CESIÓN DE DERECHOS. En la Ciudad de México, Distrito Federal el día 7 del mes de Enero del año 2013, el que suscribe Jesús Arturo Galicia Mejía alumno del Programa de Maestría en Ciencias en Ingeniería de Telecomunicaciones con número de registro B102130, adscrito a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco, manifiesta que es autor intelectual del presente Trabajo de Tesis bajo la dirección del Dr. Felipe Rolando Menchaca García y el M en C. Miguel Sánchez Meraz y cede los derechos del trabajo intitulado Protocolo de Colaboración entre Robots Autónomos, al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación. Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del autor y/o directores del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección [email protected]. Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.. Jesús Arturo Galicia Mejía.
(4) Agradecimientos A dios por no permitir que suelte su mano. Con especial cariño a mi mamá por todo su amor incondicional y por vivir en mi corazón. A mi Papá por estar siempre conmigo. A mis hermanos y familia por ser parte del gran engranaje de mi vida..
(5) Quiero mencionar mi gran gratitud al Instituto Politécnico Nacional por cobijarme durante todo mi estancia como estudiante de maestría y formar parte importante del desarrollo del presente trabajo, así como al Dr. Felipe Rolando Menchaca García, quien sirvió de consejero y guía durante mi formación profesional, asi como también al M. en C. Miguel Sánchez Meraz por apoyar al desarrollo del presente trabajo..
(6) PROTOCOLO DE COLABORACIÓN ENTRE ROBOTS AUTÓNOMOS Tesis que presenta: Ing. JESÚS ARTURO GALICIA MEJÍA SEPI ESIME Unidad Profesional “Adolfo López Mateos”. Directores de Tesis: Dr. FELIPE ROLANDO MENCHACA GARCÍA SEPI ESIME Unidad Profesional “Adolfo López Mateos” MC. MIGUEL SÁNCHEZ MERAZ SEPI ESIME Unidad Profesional “Adolfo López Mateos”. INSTITUTO POLITÉCNICO NACIONAL MÉXICO MMXII.
(7) Contenido CAPÍTULO I ................................................................................................................................. 1 INTRODUCCIÓN..................................................................................................................... 1 1.1 MOTIVACIÓN.................................................................................................................... 2 1.2 ANTECEDENTES ............................................................................................................. 3 1.3 PLANTEAMIENTO DEL PROBLEMA ............................................................................. 5 1.4 OBJETIVOS ...................................................................................................................... 6 1.4.1 OBJETIVO GENERAL............................................................................................... 6 1.4.2 OBJETIVO ESPECIFICO .......................................................................................... 6 1.5 JUSTIFICACIÓN ............................................................................................................... 6 1.6 ALCANCES Y LÍMITES .................................................................................................... 7 1.7 CONTENIDO ..................................................................................................................... 7 CAPÍTULO II ................................................................................................................................ 9 MARCO TEÓRICO. ................................................................................................................ 9 INTRODUCCIÓN..................................................................................................................... 9 2.1. INTRODUCCIÓN A LOS ROBOTS AUTÓNOMOS.................................................... 10 2.2 ROBOTS .......................................................................................................................... 13 2.2.1 CLASIFICACIÓN DE LOS ROBOTS ..................................................................... 15 2.2.2 ROBÓTICA MÓVIL .................................................................................................. 17 2.3 AMBIENTES COLABORATIVOS .................................................................................. 18 2.3.1 AGENTES ROBÓTICOS COLABORATIVOS. ...................................................... 20 2.4. COMUNICACIONES INALÁMBRICAS ........................................................................ 23 2.4.1 Wi-Fi .......................................................................................................................... 23.
(8) 2.4.2. RED AD HOC .......................................................................................................... 25 2.5. INTELIGENCIA ARTIFICIAL......................................................................................... 26 2.6 DESCRIPCIÓN DE UNA ONTOLOGIA ........................................................................ 29 2.6.1 Conceptualización ontológica ................................................................................. 33 2.6.2 TIPOS DE ONTOLOGÍAS ....................................................................................... 35 2.6.3 Detalle de la intención de las ontologías ............................................................... 37 2.7 ESTADO DEL ARTE ...................................................................................................... 38 2.7.1 ROBOCUP................................................................................................................ 38 2.7.2 TORNEO MEXICANO DE ROBOTICA.................................................................. 43 CAPITULO III ............................................................................................................................. 47 BASES TEÓRICAS ............................................................................................................... 47 ANALISIS Y DISEÑO DEL PROTOCOLO .......................................................................... 47 Introducción ........................................................................................................................... 47 3.1 FUNDAMENTOS DEL MODELO .................................................................................. 48 3.2 FORMALIZACIÓN DEL PROTOCOLO ........................................................................ 49 3.3 ARQUITECTURA DEL SISTEMA ................................................................................. 55 3.3.1 EL COEFICIENTE DE CORRELACION ................................................................ 62 3.3.2. INTERPRETACIÓN DEL COEFICIENTE DE CORRELACIÓN ......................... 65 3.4 JUSTIFICAIÓN ................................................................................................................ 66 CAPITULO IV ............................................................................................................................ 68 DESARROLLO E IMPLEMENTACIÓN DEL SISTEMA ..................................................... 68 INTRODUCCIÓN................................................................................................................... 68 4.1 CONFIGURACIÓN DE LA RED .................................................................................... 69 4.1.1INTERCAMBIO DE DATOS ..................................................................................... 71.
(9) 4.3 DEFINICIÓN DEL SISTEMA DE CONTROL DEL HARDWARE EN EL ROBOT . ... 77 CAPITULO V ............................................................................................................................. 82 PRUEBAS Y RESULTADOS ............................................................................................... 82 5.1 PRUEBAS........................................................................................................................ 82 5.1.1COMUNICACIÓN...................................................................................................... 83 5.1.2 DESCRIPCIÓN SEMÁNTICA. ................................................................................ 85 5.3 OPERACIONES ROBÓTICAS. ..................................................................................... 87 CAITULO VI ............................................................................................................................... 90 CONCLUISIONES................................................................................................................. 90 6.1 CONLUSIONES .............................................................................................................. 90 6.2 TRABAJO FUTURO ....................................................................................................... 91 Anexo A...................................................................................................................................... 93 CONSTRUCCIÓN DE UN ROBOT TIPO ARAÑA. ............................................................ 93 7.1 DISEÑO ........................................................................................................................... 93 7.2 MOTOR............................................................................................................................ 93 7.3 LOCOMOCIÓN ............................................................................................................... 94 REFERENCIAS ......................................................................................................................... 98 Reconocimientos obtenidos en congresos nacionales e internacionales .......................... 100.
(10) INTRODUCCIÓN. Uno de los grandes sueños del hombre se encuentra, en poseer una máquina capaz de reproducir los movimientos y, hasta cierto punto, el comportamiento, de los seres humanos o de los animales. La evolución tan acelerada de la tecnología hoy en día, acerca más y más a la realidad los sueños que por décadas han tenido en estudio la robótica. Dicha disciplina ha requerido de un nivel técnico y conceptual muy alto que ha retrasado el inicio de su desarrollo, pero actualmente se están logrando los primeros pasos de la revolución de esta disciplina que sin lugar a duda está creando el principio de una nueva era para la raza humana.. i.
(11) ABSTRACT. One of the great dreams of man lies in having a machine capable of reproducing the movements and, to some extent, the behavior of human beings or animals. The rapid evolution of technology as today, closer and closer to reality the dreams we have had for decades under study robotics. This discipline has required a technical and conceptual level high that has delayed the start of its development, but now are making the first steps of the revolution of the discipline that undoubtedly are creating the beginning of a new era human race.. ii.
(12) LISTA DE FIGURAS Y TABLAS CAPITULO 2 Figura 2.1 Robot Wheelbarrow Figura 2.2 Robot Sojourner Figura 2.3 Robot Asimo Figura 2.4 Clasificación de Robots con patas Figura 2.5 Logotipo Wi Fi Figura 2.6 Esquema de los Agentes Figura 2.7 Modelos pensados en un Lenguaje Figura 2.8 Tipos de ontologías Figura 2.9 Robots de la liga humanoide Figura 2.10 Escenario de la Robocup Rescue Figura 2.11 Escenario de la Robocup @home Figura 2.12 Escenario de la Robocup Junior Figura 2.13 Escenario de la Robocup Junior Dance Figura 2.14 Escenario de la Robocup LARC open Figura 2.15 Escenario de la Robocup exhibición. CAPITILO 3 Figura 3.1 Modelo del Protocolo de Colaboración en un Robot Figura 3.2 Esquema de una Red Ad-Hoc. iii.
(13) Figura 3.3 Estructura de un concepto visual de color Figura 3.4 Características de un Robot Figura 3.5 Procesamiento lingüístico en un sistema de interpretación semántico. Figura 3.6 Ontologías de tareas robot 1 Figura 3.7 Ontologías de tareas robot 2 Figura 3.8 Descripción de tareas Figura 3.9 Correlación positiva Figura 3.10 Correlación Negativa Figura 3.11 Interpretación de correlación muestral.. CAPITULO 4 Figura 4.1 Tabla de descripción de tareas Figura 4.3 Tarjeta Arduino Uno Figura 4.4 Imagen de interface de programación de la tarjeta Arduino Uno. Figura 4.4 Colaboración Robótica. CAPITULO 5 Figura 5.1 Escenario de pruebas Figura 5.2 Pantalla de terminal verificación de comunicación Figura 5.3 Pantalla de termino de ejecución de petición de usuario Figura 5.4 Ejecución de operaciones Robóticas. iv.
(14) Anexo A Figura A1 Servomotor Figura A2 Locomoción en cuatro patas Figura A3 Segmento de la pata de araña del robot Figura A4 Pata terminada Figura A5 Movimiento de la pata vista aérea Figura A6 Base de montaje de patas del Robot Figura A7 Robot terminado. Tabla 3.1 Descripción de tareas Tabla 4.1 Descripción de tareas Tabla 5.1 Vectores a comparar. v.
(15) vi.
(16) CAPÍTULO I INTRODUCCIÓN Hoy en día el crecimiento es mayor de nuevas líneas de investigación en la robótica móvil, dentro de las área de vehículos caminantes con seis patas llevan más de medio siglo de estudio. Sin embargo, en la actualidad no se ha logrado satisfacer del todo las respuestas asociadas a crear de forma segura y eficiente maquinas que caminen con seis patas. El desarrollo de la mayoría de estas máquinas caminantes ha concluido en máquinas muy grandes, pesadas y lentas, teniendo en cuenta estas características de peso y tamaño hacen que se presenten problemas en aplicaciones prácticas. Por el contrario también se han diseñado máquinas muy pequeñas, las cuales presentan el inconveniente de que la carga útil que pueden soportar es muy pequeña como los robots insectos diseñados por R. Brooks. También es posible encontrar máquinas de tamaño medio como el HAMLET desarrollado en la Universidad de Canterbury, Nueva Zelanda, los cuales pueden soportar una pequeña carga y no presentan el problema del tamaño. Una de las áreas de investigación en el desarrollo de los robots caminantes es el diseño mecánico, el cual interviene en el diseño de las patas y el diseño del cuerpo del robot. Para el caso del estudio que se reporta en este trabajo, se tomó como base para la. 1.
(17) determinación de las longitudes principales de las patas, y las dimensiones del cuerpo de robot, investigaciones de morfología de las hormigas obreras. Esto con el fin de adquirir algunas de sus características (capacidad de carga, y adaptabilidad de desplazamiento por terrenos irregulares). Los protocolos de comunicación dentro de los robots colaborativos hacen que puedan intercambiar una serie de información entre ellos para actuar de manera conjunta en el logro de distintas tareas planteadas. Esta comunicación permite que interactúen entre si , manteniendo sus características propias de funcionalidad , basando su comportamiento en reglas muy simples, al reaccionar solo ante situaciones locales o amenazas basadas en los estímulos sensoriales sin perder de vista la homogeneidad de los robots. Asegurando acciones más rápidas y eficientes al segmentar las tareas a realizar.. 1.1 MOTIVACIÓN Hoy en día los sistemas de telecomunicaciones son más robustos cada vez, partiendo del hecho de usar una o varias técnicas específicas para la transmisión de un mensaje de un punto a otro. Así cubriendo todas las formas de comunicación a distancia. Estas técnicas son la base de distintas aplicaciones que están revolucionando la tecnología en diferentes áreas como lo es: la medicina, la industria automotriz, la de servicios digitales, etc. Algunas de estas aplicaciones se pueden ver en los sistemas robóticos que asisten a dichas áreas. Estos sistemas robóticos en su mayoría basan su funcionamiento en protocolos de colaboración. Los protocolos de colaboración dentro de los robots hacen que puedan intercambiar una serie de información entre ellos para actuar de manera conjunta en el logro de distintas tareas planteadas. Esta comunicación permite que interactúen entre sí, manteniendo sus características propias de funcionalidad, basando su comportamiento en reglas muy. 2.
(18) simples, al reaccionar solo ante situaciones locales. Asegurando acciones más rápidas y eficientes al segmentar las tareas a realizar. Debido a la importancia que tienen los protocolos de colaboración dentro de los robots surge el interés de estudiar la creación de protocolos de comunicación, así como el de crear ambientes específicos para probar dichos protocolos.. 1.2 ANTECEDENTES La Robótica ha sido parte del éxito por formar parte de las líneas de producción clásicas que se realiza mediante robots estáticos, en una segunda parte se resuelven tareas que pueden realizarse con robots móviles trabajando en ambientes estructurados y ya conocidos a priori (p.ej. aquellos en los que se dispone de un mapa global del ambiente al inicio de la tarea). Las tareas que deben ser ejecutadas en ambientes reales, no estructurados, desconocidos a priori e incluso temporalmente cambiantes, dan origen a una serie de dificultades que han producido una desaceleración en el desarrollo de soluciones robóticas para el trabajo en estos entornos. En ambientes como el descrito existen numerosas aplicaciones en las que es necesaria, la cooperación de dos o más robots móviles. En este tema en particular existen algunas investigaciones. (Mataric, M, (1994). Reward functions for accelerated learning. En W.W. Cohen y H. Hirsh (eds.), Machine Learning: Proceedings of the Eleventh International Conference, 181-189. San Mateo, CA: Morgan Kaufmann; Parker, L. (1994). Alliance: An architecture for fault tolerant, cooperative control of heterogeneous mobile robots. Proceedings of he 1994 IEEE/RSJ International Conference on Intelligent Robots and Systems, 776-783). Estas investigaciones tienen resultados limitados a causa de los problemas de coordinación entre los robots y la complejidad combinatoria de vectores de entrada que el. 3.
(19) robot puede percibir (considerando como parte de esos vectores la presencia y actividad de otros robots). El uso de sistemas multi-agente, compuestos por robots móviles capaces de actuar en un ambiente no estructurado, ofrece ventajas como: a) Robustez, entendida como resistencia al funcionamiento incorrecto de alguno de los robots. El fallo en algún robot no paraliza el trabajo del resto. b) Especialización, creando diversos tipos funcionales que se adapten a diferentes características requeridas en un mismo ambiente para la realización de una cierta tarea global. Un ejemplo de ello lo constituye la posibilidad de especializarse en la realización de sub-tareas. c) Emergencia de funciones que los robots por separado no poseen. Partiendo de robots simples, con poca capacidad de decisión, el trabajo colectivo puede alcanzar altas cotas de complejidad. d) Comunicación entre robots que lleva a un mejor conocimiento del ambiente. Si bien no es imprescindible que exista comunicación, la mayoría de sistemas multi-robot incluye esta capacidad en diferente medida. e) Fácil programación de los robots. Asumimos para esta programación se usara un equipo de robots simples, cuya potencia se halla en el trabajo conjunto. En la referencia científica existen recientes ejemplos de utilización de robots móviles integrados en sistemas multi-agente. Describimos a continuación algunas características relevantes de estos robots: Todos estos robots han sido diseñados para el trabajo en solitario y adaptados posteriormente al trabajo colectivo. Ello implica una serie de limitaciones en la comunicación entre los robots que hacen difícil su trabajo en entornos reales en los que la relación con ordenadores centrales controladores no sea posible.. 4.
(20) 1.3 PLANTEAMIENTO DEL PROBLEMA En la actualidad los ambientes de aplicación de la robótica han evolucionado en las últimas décadas, desde entornos muy simples y controlados a entornos muy dinámicos en exteriores. Al mismo tiempo, para afrontar ciertas tareas, la cooperación en grupos de varios robots o un par de ellos, se ha convertido en una necesidad. Una tendencia en la actualidad es la investigación en sistemas que consideren la colaboración entre robots para una serie de aplicaciones, como robótica de servicio en entornos urbanos, o monitorización de desastres. Por otro lado, hay un creciente interés en la robótica de servicio; cada vez son más frecuentes aplicaciones de robots en entornos urbanos, para tareas como el guiado y asistencia de personas, transporte de personas y objetos, etc. Por lo que surge la necesidad de desarrollar un protocolo de colaboración el cual sea capaz de que estos elementos pueden comunicarse entre sí de forma inalámbrica, y formar lo que se llama un sistema de robots en red (Network Robot System, NRS). La fusión de la información de los distintos elementos permite un seguimiento más preciso de las tareas asignadas. Al generar la necesidad de diseñar un protocolo de colaboración entre robots una gran parte recae en el procesamiento de tareas en las que un único comando expresado mediante una frase se pude traducir a una acción compleja que incluye varias tareas individuales. Una vez que se tenga una instrucción, palabra, tarea, etc., para un robot, este tendrá que interpretar la palabra en base a una ontología definida y llevar a cabo una tarea definida. Ya por ultimo al hablar de robots se tiene que resolver las necesidades de hardware y software a utilizar. Dicha resolución de necesidades debe estar basada en la tecnología actual para aprovechar al máximo los recursos disponibles y asegurar el desarrollo de robots como herramientas individuales.. 5.
(21) 1.4 OBJETIVOS En respuesta a la problemática planteada con anterioridad se surgen una serie de objetivos:. 1.4.1 OBJETIVO GENERAL Desarrollar un ambiente léxico , semántico y pragmático de comunicación que permita la interacción entre dos o más robots autónomos. 1.4.2 OBJETIVO ESPECIFICO . Diseñar un protocolo de comunicación de comandos entre robots autónomos.. . Implementar. ontologías. para la descripción del lenguaje usado dentro del. protocolo entre robots autónomos. . Implementar operaciones robóticas entre robots autónomos. Usando hardware y software abierto.. 1.5 JUSTIFICACIÓN En el área de la robótica autónoma colaborativa, ha tenido alcances que se ven medidos por la tecnología actual y su capacidad de análisis de información. El uso de sistemas de comunicación basados en arquitecturas de hardware cada vez más integradas, y la aplicación de lenguajes ontológicos para el análisis de información hace posible un progreso cada vez más considerable en la operación de tareas planteadas en los robots.. 6.
(22) 1.6 ALCANCES Y LÍMITES Alcances: . Proponer un protocolo de colaboración utilizando ontologías.. . Contribuir a la generación de estándares para futuros robots o aplicaciones.. . Utilizar el sistema operativo de código abierto.. . Utilizar interfaces comerciales de bajo costo.. . Proponer una construcción sencilla de robots tipo araña.. Límites: . Utilizar un pc para la parte de análisis de datos, la cual puede ser sustituida por algún hardware embebido y así poder montarlo sobre el robot.. . No incorporar sensores a los robots para que estos puedan conocer el escenario de colaboración.. . Usar escenarios ideales, que no cambian con el tiempo.. 1.7 CONTENIDO Esta tesis está estructurada de la siguiente forma. En el capítulo 2 se describen los conceptos básicos que tienen relación con los robots colaborativos. También se estudiaran algunos de los parámetros más importantes que intervienen en los ambientes colaborativos. En el capítulo 3 se estudiara el análisis y el diseño de la arquitectura del protocolo propuesto para la colaboración entre robots autónomos. En el capítulo 4 se ha dedicado a la implementación de la metodología descrita en el capítulo tres, así como la descripción más detallada del protocolo propuesto.. 7.
(23) En el capítulo 5 se presentaran las pruebas hechas al protocolo, así como el estudio de resultados de la interpretación semántica y algunas operaciones robóticas. Por ultimo en el capítulo 6 se presentan las conclusiones y líneas de trabajo a futuro.. 8.
(24) []. CAPÍTULO II MARCO TEÓRICO. INTRODUCCIÓN La historia de la humanidad se ha caracterizado siempre por la búsqueda constante de nuevos medios para mejorar sus condiciones de vida. Estos esfuerzos le han servido para reducir el trabajo en aquellas tareas en las que la fuerza juega un papel primordial. Esto ha marcado el camino a dirigir estos esfuerzos a otros campos, como por ejemplo, a la construcción de máquinas que ayuden a resolver estas tareas. Actualmente, la robótica se define como la ciencia y tecnología de los robots1. Se ocupa del diseño, manufactura y aplicaciones de éstos y combina diversas disciplinas como la mecánica, Electrónica, información, inteligencia artificial 2 e ingeniería de control. 1. La palabra "robot" proviene del escritor checoKarel Capek usada en una de sus obras en 1921, a partir de la palabra checa "robota", que significaba servidumbre o trabajo forzado. Posteriormente, sería Isaac Asimov quien utilizaría el término "robótica" la ciencia que estudia los robots. 2. Inteligencia Artificial (IA) Ciencia perteneciente a la rama de la Cibernética, que estudia el mecanismo de la inteligencia humana con el fin de crear máquinas inteligentes, capaces de realizar cálculos y de "pensar",( elaborar juicios y tomar decisiones).. 9.
(25) []. Mientras que la robótica, en principio, evoluciona la mecánica de los robots, la inteligencia artificial fundamentada en la teoría de la evolución se basa en los mecanismos de selección que utiliza la naturaleza, donde los individuos más fuertes de una población son los que sobreviven. La robótica móvil constituye actualmente uno de los tópicos de estudio que más ha suscitado interés en comunidades científicas que trabajan el área de la inteligencia artificial, en lo concerniente con el diseño de algoritmos de navegación, control, trazado de trayectorias y planificación de tareas en escenarios estructurados y no estructurados. Una de las tecnologías emergentes más prometedoras corresponde a la de Robots inteligentes que se aplica en las áreas de control de procesos industriales, comercio electrónico, aplicaciones médicas, educación y entretenimiento entre otras; que tienen una estrecha relación con el campo de la robótica móvil.. 2.1. INTRODUCCIÓN A LOS ROBOTS AUTÓNOMOS La robótica puede clasificarse en cinco generaciones en función de la división hecha por Michael Cancel, 1984 (director del Centro de Aplicaciones Robóticas de Science Application Inc.). Las dos primeras, ya alcanzadas en los ochenta, incluirán la gestión de tareas repetitivas con autonomía muy limitada. La tercera generación incluiría visión artificial, en lo cual se ha avanzado mucho en los años ochenta y noventa. La cuarta incluiría movilidad avanzada en exteriores e interiores y la quinta entraría en el dominio donde los robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas. Dentro de la robótica existen una serie de paradigmas principales los cuales responden a jerárquico, reactivo e híbrido. El paradigma jerárquico es el más antiguo (décadas de los 60 y 70), este paradigma se denomina también paradigma Percepción, Planificación, Acción. La denominación de jerárquico se debe a que las tres operaciones que acabamos de mencionar se llevan a cabo siempre secuencialmente. Para poder efectuar la planificación, las percepciones deberán haber sido pre-procesadas y transformadas en 10.
(26) []. una abstracción del entorno. Como respuesta al paradigma jerárquico, en los años ochenta se presenta el paradigma reactivo, se basa en correspondencias directas entre percepción y acción, se denomina también paradigma Percepción-Acción, de esta forma los robots se desarrollaron sobre una inteligencia más práctica, ligada a la acción directa a partir de las percepciones, sin un pre-procesamiento intensivo de las mismas. Teniendo que el robot consigue manejarse y es capaz de llevar a cabo tareas rudimentarias, una progresión natural es intentar conseguir comportamientos más complejos. El paradigma reactivo no permite conseguir esto. Por ello resulta necesario dar un paso más y buscar una manera de conseguir ese aumento de capacidades en los robots. El punto anterior hace que el razonamiento abstracto no es la prioridad en un robot autónomo, éste requiere contar con cierta inteligencia práctica que le permita sobrevivir y manejarse en su entorno. El paradigma hibrido es el llamado Planificación, Percepción, Acción. Surge como la unión de ambos paradigmas en la búsqueda de un compromiso entre las tareas deliberativas y las reactivas. En este caso el robot está compuesto, de una cadena deliberativa típica (Percepción Planificación Acción) y otra parte de un modelo reactivo (Percepción Acción). En el proceso deliberativo del robot, se lleva a cabo la planificación de alto nivel, reduciendo la abstracción de las percepciones del paradigma jerárquico, a través de la identificación de los comportamientos que adopta el robot, los cuales se realizarán a través de la cadena reactiva. Este modelo tiende a que el robot planificará cómo descomponer una tarea en sub-tareas y elegir la forma más adecuada para cumplir con esas tareas. En ese momento dichos comportamientos empiezan a ejecutarse a través del paradigma reactivo. En este punto las percepciones también se ponen a disposición del módulo de planificación.. La problemática de la robótica basada en comportamientos es el de generar mecanismos que relacionan sensores y actuadores para llegar a un nivel de coordinación capaz de. 11.
(27) []. generar comportamiento autónomo en el entorno real. En este orden se trabajan nuevas arquitecturas evolutivas, tras la búsqueda de soluciones que permitan un diseño automático de sistemas de robots autónomos, es decir esquemas que escapan de la intuición o competencia del diseñador humano, alejándonos del esquema puramente reactivo, a fin que los robots puedan sobrevivir en los entornos en los que se encuentran, siempre con la menor intervención humana posible. En la actualidad existen diferentes teorías de la mente, estas tienen como objetivo explicar el funcionamiento de la mente humana y del sentido común, y para ello subdivide la mente misma en un conjunto de agentes que cooperan entre sí. Esta teoría bien se puede llevar a la práctica y conducirnos a algo más cercano del objetivo, de lograr robots verdaderamente autónomos. Los robots autónomos deben aprender de su propio entorno esto es que deben aprender mientras se encuentran inmersos en dicho entorno.. El uso de la colaboración para facilitar el trabajo y la transmisión de información fue inicialmente propuesto por la National Science Foundation. 1. en 1989 después fue. promovido por el National Research Council 2 en 1993.. 1. National Science Foundation es una agencia del gobierno de Estados Unidos independiente que impulsa investigación y educación fundamental en todos los campos no médicos de la Ciencia y la Ingeniería 2. National Research Council es una agencia del Gobierno de Canadá que lleva a cabo la investigación científica y el desarrollo.. 12.
(28) []. 2.2 ROBOTS La robótica puede clasificarse en cinco generaciones en función de la división hecha por Michael Cancel, 1984 (director del Centro de Aplicaciones Robóticas de Science Application Inc.). Las dos primeras, ya alcanzadas en los ochenta, incluirán la gestión de tareas repetitivas con autonomía muy limitada. La tercera generación incluiría visión artificial, en lo cual se ha avanzado mucho en los años ochenta y noventa. La cuarta incluiría movilidad avanzada en exteriores e interiores y la quinta entraría en el dominio donde los robots utilizan las técnicas de inteligencia artificial para hacer sus propias decisiones y resolver problemas. Actualmente existen máquinas a control remoto que pueden considerarse robots por su estructura y complejidad de los programas de control. Se usan en lugares y situaciones peligrosas para los seres humanos como es la exploración de la plataforma submarina y la inspección de construcciones subacuáticas e instalaciones petroleras. Un ejemplo de esto es el robot “Consub” que puede descender a gran profundidad en el mar. Otra máquina a control remoto es “Mobot”, quien manipula productos químicos y radioactivos, nocivos para el ser humano, mientras que su operador permanece seguro en otro cuarto. Lleva cámaras de televisión y micrófonos y sus extremidades en forma de pinzas pueden manejar delicados recipientes de cristal. Así como también un robot que es propiedad del ejército británico llamado Wheelbarrow (Figura 2.8), es utilizado para buscar y manipular bomba colocadas en automóviles. Se controla a través de un cable eléctrico, tiene una cámara de televisión y otras herramientas. Desde una distancia segura el operador puede guiarlo a un automóvil sospechoso, hacer que rompa una ventana y coloque su cámara en el interior. Si detecta una bomba, el operador remotamente puede manipularla para tratar de desactivarla o de lo contrario hacerla explotar de forma controlada.. 13.
(29) []. Figura 2.1. Robot Wheelbarrow. En este grupo también se puede incluir el “Sojourner” (Figura 2.9) de la misión espacial “PathFinder”, un pequeño vehículo explorador enviado al planeta Marte para recoger muestras de la superficie. El robot cuenta con cámaras electrónicas para la transmisión de imágenes a la tierra a través de una antena de alto alcance que portaba la sonda que lo acompañaba.. Figura 2.2. Robot Sojourner. 14.
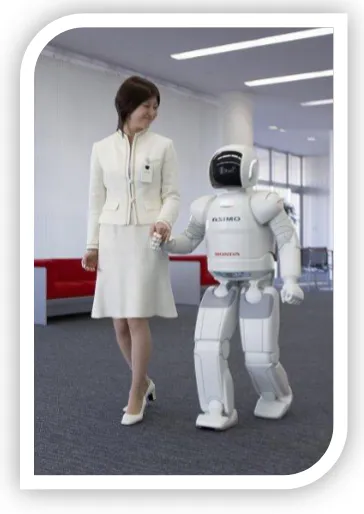
(30) []. El robot androide “Asimo”, desarrollado por Honda Motor Co. (Figura 2.10) es pequeño, liviano, y es capaz de caminar de una manera parecida a un humano. Un área básica de investigación de esta empresa en el campo de la robótica, pretende desarrollar robots que caminen autónomamente y que puedan ser útiles a los seres humanos y de uso práctico para la sociedad. La investigación y desarrollo de este proyecto comenzó en 1986.. Figura 2.3 Robot Asimo.. 2.2.1 CLASIFICACIÓN DE LOS ROBOTS Para poder clasificar los robots lo primero que se debe hacer es definir la terminología. Robot según la Enciclopedia Británica: Máquina operada automáticamente que sustituye el esfuerzo de los humanos, aunque no tiene por qué tener apariencia humana o desarrollar sus actividades a la manara de los humanos. Robot según el Diccionario Merrian Webster: Máquina que se asemeja a los humanos y desarrolla como ellos tareas complejas como andar o hablar. Un dispositivo que desarrolla. 15.
(31) []. de manera automática tareas complicadas, a menudo de manera repetitiva Un mecanismo guiado por control automático. Robot según el Diccionario de la Real Academia de la lengua Española: Máquina o ingenio electrónico programable, capaz de manipular objetos y realizar operaciones antes reservadas sólo a las personas. Una vez explicado el término robot existen una serie de clasificaciones: . Robot Industrial (Robotic Industries Association): Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas.. . Robots de servicio (Federación Internacional de Robótica): Un robot que opera de manera semi-autonoma o totalmente autónoma para realizar servicios útiles a los humanos y equipos, excluidas las operaciones de manufactura.. Dentro de la robótica de servicio podemos encontrar: . Robot doméstico: Aquel robot destinado a ser usado por humanos sin formación técnica específica, al objeto de servirle como ayudante o colaborador en sus quehaceres o actividades diarias.. . Robots teleoperados (NASA): Dispositivos robóticos con brazos manipuladores y sensores y cierto grado de movilidad, controlados remotamente por un operador humano de manera directa o a través de un ordenador.. . Robot Teleoperado (ISO): Un robot que puede ser controlado remotamente por un operador humano, extendiendo las capacidades sensoriales y motoras de éste a localizaciones remotas.. . Telerobot: cualquier robot cuya tarea pueda ser monitorizada y reprogramada a distancia por el humano.. . Cobot: Dispositivo robótico que manipula objetos en colaboración física directa con él. Robot móvil (ISO 8373): Robot que contiene todo lo necesario para su pilotaje y movimiento (potencia, control y sistema de navegación).. 16.
(32) []. 2.2.2 ROBÓTICA MÓVIL En la actualidad los robots móviles se sirven de diferentes mecanismos de locomoción, entre los que se pueden apreciar los siguientes: Enfoque biológico: busca concebir un sistema locomotor basado en características propias de organismos vivos, aprovechando las ventajas que estas puedan obtener de cada caso determinado. . Enfoque aplicativo: trata de encontrar una solución efectiva, tratando de optimizar algún aspecto del diseño. Este enfoque es más común en aplicaciones industriales y comerciales.. . Enfoque innovativo: Este enfoque está orientado a la investigación, trata de enriquecer. las. estrategias. de. locomoción. explorando. métodos. poco. convencionales. Como resultado de los diferentes enfoques, en la actualidad existe una gran cantidad de aplicaciones robóticas móviles, que pueden agruparse de acuerdo con el tipo de mecanismo de locomoción que utilizan: . Ruedas: La rueda es un método altamente probado, que presenta una gran cantidad de ventajas y es muy eficiente en superficies homogéneas poco inclinadas. Su aplicación en un robot es producto del enfoque aplicativo antes descrito.. . Patas: Estos son, evidentemente, mecanismos producto del enfoque biológico. Sus ventajas, entre otras, son la adaptabilidad al terreno y la posibilidad de omnidireccionalidad. Se encuentra una gran variedad de diseños y aplicaciones, comerciales (robot Aibo de Sony y el robot bípedo de Honda Asimo ), industriales (máquina caminante de Plustech ) exploratorias (Bares con el robot Dante II) entre otras. Debe ser destacado el robot Nao que será la nueva plataforma bípeda oficial de la RoboCup a partir del. 17.
(33) []. . Híbridos: Algunos métodos utilizan combinaciones entre ruedas y patas como lo que han resultado conveniente para algún tipo de terreno o alguna aplicación, como el robot saltador para exploración planetaria de Fiorini.. Robots Voladores: se trata de un tipo especial ya que suelen ser robots teleoperados más orientados a la aeronáutica que a la robótica. Según el número de patas. Según tipo de medio. Segun el tipo de actuador. Según grados de libertad. Según el tipo de control. 1 pata. Movimiento en el espacio. Eléctrico. 1 Grado. Por programa. 2 patas. Movimiento bajo el agua. Pneumático. 2 Grados. Semiautomatic o. 3 patas. Movimiento en el aire. Hidráulico. 3 Grados. Inteligente. Estructuras complejas. 4 patas. 5 patas. 6 patas. 7 patas. 8 patas. Figura 2.4 Clasificación de robots con patas.. 2.3 AMBIENTES COLABORATIVOS Los ambientes colaborativos se describen como un grupo de entidades trabajando conjuntamente en un mismo ambiente de trabajo propiciando la colaboración esto hace referencia al logro de un objetivo compartiendo tareas. . En un escenario colaborativo es necesario que se den tres elementos claves: Igual participación, responsabilidad individual e interdependencia positiva.. 18.
(34) []. La clasificación según su objetivo principal : . Centrado en el Individuo: El cual gestiona localmente el trabajo de cada individuo en el interior del grupo.. . Centrado en el Escenario: El cual se esmera por la gestión de las tareas encargadas en un determinado entorno, su enrutamiento, consulta, actualización, entre otras.. . Centrado en el Proceso: El cual controla la conclusión de actividades.. Un ambiente colaborativo también se puede describir como una sociedad organizada compuesta por agentes que interactúan entre sí, ya sea para colaborar en la solución de un conjunto de problemas o en la consecución de una serie de objetivos individuales o colectivos. Algunas características que deben de cubrir dichos ambientes son: - Organización Social: Es la manera como el grupos de agentes se organizan dentro del sistema de acuerdo con la función o rol que les corresponda, sus características, responsabilidades, necesidades y teniendo en cuenta el propósito de la comunicación con los demás agentes. - Cooperación: Es el resultado de compartir resultados intermedios para producir un avance en la solución de las metas particulares de otros agentes y a la vez, aportar al logro progresivo de las metas globales del sistema. - Coordinación: Es una propiedad de los sistemas de agentes que se encuentran realizando una actividad en un ambiente compartido. Por medio de la comunicación los agentes pueden coordinar sus acciones y comportamiento, con el consiguiente resultado de sistemas más coherentes, es decir, sistemas que se comportan bien como una unidad. En síntesis, el objetivo de la coordinación es evitar situaciones de conflictos entre los agentes.. 19.
(35) []. - Control: Es el mecanismo básico de apoyo para la implementación de los mecanismos de la coordinación en un SMA. Este puede ser considerado desde dos puntos de vista: control global y control local . - Comunicación: Los agentes pueden comunicarse con el fin de alcanzar sus metas o las de la sociedad o sistema en el cual habitan.. 2.3.1 AGENTES ROBÓTICOS COLABORATIVOS. En la robótica actual se está acentuando el uso de una de las áreas de la inteligencia artificial distribuida: los sistemas multi-agente. No existe una definición formal del término agente, sino que existen múltiples perspectivas de agente en función del dominio de aplicación: agente inteligente, agente móvil, agente de información, etc. Por tanto, existen muchos tipos de agentes, pero se deben resaltar los agentes colaborativos, por tener especial relación con el objetivo principal de este proyecto. Estos tipos de agentes destacan por su autonomía y cooperación con otros agentes para ejecutar tareas comunes. La filosofía de implementar un sistema con agentes colaborativos es la siguiente: crear un sistema que interconecte agentes colaborativos permite al conjunto funcionar más allá de las capacidades de cualquiera de sus miembros. La siguiente expresión denota esta filosofía: ∑ Donde V es la función de utilidad En resumen los agentes son entidades que actúan en representación de sus usuarios humanos o dueños para realizar tareas complejas, se comunican por medio del protocolo de paso de mensajes y realizando sus acciones concurrentemente; poseen propiedades como: autonomía, habilidad social, reactividad, pro actividad, movilidad, continuidad. 20.
(36) []. temporal, adaptabilidad y aprendizaje. Habitan en ciertos ambientes dinámicos y complejos, realizando una serie de tareas o metas para las cuales fueron. . Autonomía. Es la característica por la cual los agentes operan por sí mismos sin la intervención del hombre u otros agentes, quienes no tienen control alguno en susfunciones y su estado interno.. . Habilidad Social. Por medio de la cual los agentes interactúan con otros agentes (o humanos) por medio de un lenguaje de comunicación preestablecido.. . Reactividad. Los agentes perciben el ambiente (del medio físico, por medio de unanterfaz gráfica, o por medio de otros agentes) y responden de manera oportunacambiando los sucesos.. . Pro-actividad. Los agentes no sólo actúan en respuesta a un evento, deben estar habilitados para tomar la iniciativa, con el fin de conseguir la meta propuesta.. De manera simple, un agente actuará basado en lo que cree del mundo, en lo que es capaz de hacer y en cómo sus acciones afectarán sus metas. De igual manera, las acciones de un agente son determinadas por sus decisiones, las cuales son limitadas por sus creencias. Dichas creencias hacen referencia al estado del mundo (pasado, presente o futuro), al estado mental de otros agentes y a las capacidades de él mismo y de otros agentes. En la actualidad los desarrollos más recientes en robótica móvil buscan obtener agentes robóticos dotados de percepción y cierto grado de inteligencia que realicen tareas útiles en su entorno de trabajo. Esto implica que el sistema sensorial del robot, le debe permitir ciertos niveles de detalle en la comprensión de su entorno. El trabajo con grupos de robots cooperativos ofrece una serie de ventajas:. 21.
(37) []. . Simplificación y distribución de tareas mediante la estrategia de solución de problemas, “divide y vencerás”.. . Sensórica e inteligencia distribuida que potencializa el paralelismo de tareas.. . Posibilita el diseño de mini-robots de bajo consumo de energía y de arquitectura más simple, haciendo que el sistema sea más confiable.. Estos puntos hacen que los sistemas robóticos dispongan de mayor capacidad de trabajo, más aún, cuando algunos de los robots se tornan especialistas en la ejecución de tareas específicas, esto da origen a un trabajo cooperativo más eficiente y adaptable. Esto no implica que se superen todos los problemas a la hora de implementar un sistema multiagente robóticos comparado con un sistema mono-agente; Estos problemas son: la coordinación entre agentes y toma de decisiones, la inteligencia y sensores distribuidos que deben de ser soportados por un sistema de comunicaciones robusto y confiable. Las acciones que lleva a cabo cada individuo del sistema multi-agente robótico durante el proceso de cooperación se relacionan con sus características en cuanto al sistema perceptual y los efectores con que cuenta cada agente, de allí los diferentes grados de especialización que puede lograr cada agente en el sistema. Los niveles de especialización que puede alcanzar cada individuo del sistema multiagente se relaciona con las especificidades a nivel de sistema perceptual, procesamiento y de los efectores con que cuenta cada uno. En ese sentido se establecen dos tipos de relaciones: de complementariedad (la suma de los esfuerzos individuales permite completar la tarea) y jerarquización (nivel de subordinación entre agentes) entre los robots en lo referente a los niveles de funcionalidad y de procesamiento de cada agente. Un sistema multi-agente es una sociedad organizada compuesta por agentes semiautónomos que interactúan entre sí, ya sea para colaborar en la solución de un conjunto de problemas o en la consecución de una serie de objetivos individuales o. 22.
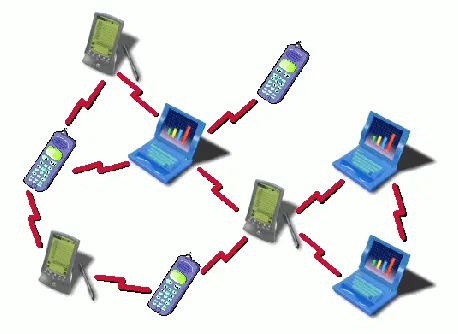
(38) []. colectivos. Estos agentes informáticos pueden ser homogéneos o heterogéneos y pueden tener metas comunes o no, pero siempre involucrarán algún grado de comunicación entre ellos (Lemaître 1998, Boissier & Demazeau 1991).. 2.4. COMUNICACIONES INALÁMBRICAS La comunicación inalámbrica o sin cables es aquella en la que extremos de la comunicación (emisor/receptor) no se encuentran unidos por un medio de propagación físico, sino que se utiliza la modulación de ondas electromagnéticas a través del espacio. En este sentido, los dispositivos físicos sólo están presentes en los emisores y receptores de la señal. A continuación se detallarán los principales protocolos de comunicación inalámbrica en el ámbito de la robótica.. 2.4.1 Wi-Fi Wi-Fi es un estándar para la conexión de dispositivos electrónicos mediante tecnología inalámbrica. Hoy en día, la mayor parte de los dispositivos que utilizamos incorporan esta tecnología (teléfonos, consolas, portátiles, etc.) con la que podemos conectarnos a una red (o Internet) sin la necesidad de utilizar cables. Para la conexión tenemos dos modos de acceso posibles: (AP) Access point: Permite al resto de dispositivos conectarse a una red inalámbrica, centralizando las conexiones en un único dispositivo. Normalmente está conectado a un encaminador (router) que se encarga de conectar la red inalámbrica con Internet. Ad-hoc: Permite el intercambio de información entre varios dispositivos de forma descentralizada, sin la necesidad de utilizar una infraestructura ajena para la conexión. Wi-Fi es una marca de la Wi-Fi Alliance, la organización comercial que adopta, prueba y certifica que los equipos cumplen los estándares 802.11 relacionados a redes. 23.
(39) []. inalámbricas de área local. El alcance de una red Wi-Fi está alrededor de los 100 metros al aire libre, reduciéndose esta distancia con la presencia de obstáculos como paredes. Los estándares de Wi-Fi IEEE 802.11b, IEEE 802.11g e IEEE 802.11n disfrutan de una aceptación internacional debido a que la banda de 2.4 universalmente, con una velocidad de hasta 11. GHz está disponible casi. Mbps , 54. Mbps y 300. Mbps,. respectivamente. En cuanto a los protocolos de seguridad que utiliza existen varias alternativas para garantizar la. seguridad de estas redes. Las más comunes son la. utilización de protocolos de cifrado de datos para los estándares Wi-Fi como el WEP, el WPA, o el WPA2 que se encargan de codificar la información transmitida para proteger su confidencialidad, proporcionados por los propios dispositivos inalámbricos. La mayoría de las formas son las siguientes: WEP, cifra los datos en su red de forma que sólo el destinatario deseado pueda acceder a ellos. Los cifrados de 64 y 128 bits son dos niveles de seguridad WEP. WEP codifica los datos mediante una “clave” de cifrado antes de enviarlo al aire. Este tipo de cifrado no está muy recomendado, debido a las grandes vulnerabilidades que presenta, ya que cualquier cracker puede conseguir sacar la clave. WPA: presenta mejoras como generación dinámica de la clave de acceso. Las claves se insertan como de dígitos alfanuméricos, sin restricción de longitud. Sin embargo, su uso esta más encaminado a la conectividad de dispositivos que buscan un largo alcance y gran ancho de banda, independientemente de otros factores tan importantes en los robots móviles como puede ser el consumo de las baterías.. Figura 2.5: Logotipo Wi-Fi. 24.
(40) []. 2.4.2. RED AD HOC Una red ad-hoc (Mobile Ad-hoc Network o Manet) es unconjunto de nodos o hosts que se comunican entre sí mediante enlaceswireless, sin la necesidad de una infraestructura de red fija. Cada nodo actúacomo router y va encaminando los distintos paquetes entre los diferentesterminales, sin la necesidad de que exista un alcance directo entre la fuente yel destino.Este tipo de red es autónoma entre terminales que pueden moverse libremente Los nodos de una manet utilizan tablas de encaminamiento para organizar lossaltos entre los nodos intermedios y así poder enviar los paquetes. Estas tablasde encaminamiento se deben actualizar con mucha frecuencia ya que la red esmóvil y van cambiando de posición constantemente.. 2.4.2.1 CARACTERÍSTICAS Ad Hoc Las principales características de las redes ad hoc son: • Los terminales autónomos. En este tipo de redes cada nodo es autónomo pudiendo funcionar como en caminador (router). • Funcionamiento distribuido. Una manet puede formarse sin la necesidad de infraestructura y al mismo tiempo conectarse a una para mejorar su capacidad. Por eso todos los terminales se encargan del control y la gestión de la red. . Encaminamiento multisalto. Los paquetes realizan uno o varios saltos para llegar de la fuente al destino.. . Topología de red dinámica. Todos los nodos de la red son terminales móviles que pueden moverse libremente cambiando constantemente su arquitectura de red. Esto introduce una cierta complejidad al realizar el encaminamiento.. 25.
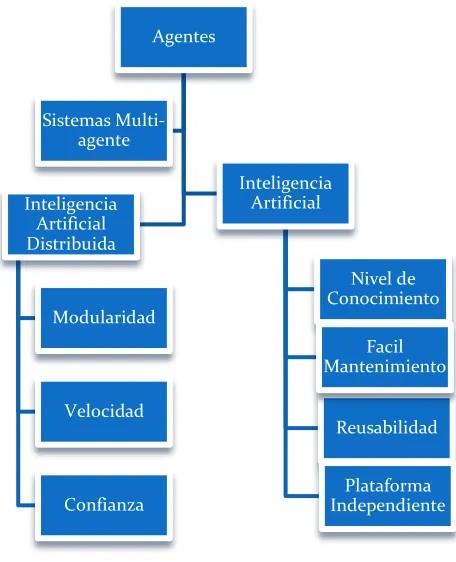
(41) []. . Enlace fluctuante. Al tratarse de conexiones inalámbricas utilizan como medio de transmisión el aire. Esto supone una alta tasa de errores al tener las limitaciones del ruido, atenuación, ancho de banda limitado.. . Terminales ligeros. La capacidad de los terminales acostumbra a ser baja al igual que el de las baterías.. 2.5. INTELIGENCIA ARTIFICIAL La inteligencia artificial es una disciplina en la cual se desarrollan algoritmos de comportamiento que emulan ciertas características de los organismos biológicos inteligentes. Otras definiciones son : “Un campo de estudio que se enfoca a la explicación y emulación de la conducta inteligente en función de procesos computacionales” “El arte de crear máquinas con la capacidad de ejecutar funciones que son realizadas por personas y requieren inteligencia” “El estudio de las capacidades mentales mediante el uso de modelos computacionales” La necesidad de distribuir las actividades y la inteligencia puede explicarse, según los siguientes aspectos (Figura 2.1):. 26.
(42) []. Agentes. Sistemas Multiagente. Inteligencia Artificial Distribuida. Inteligencia Artificial. Nivel de Conocimiento Modularidad Facil Mantenimiento Velocidad. Reusabilidad Plataforma Independiente. Confianza. Figura 2.6 Esquema de los agentes. i.. Los problemas complejos son físicamente distribuidos: Esto se simplifica, una red de transporte, por su naturaleza propia, es distribuida geográficamente, al igual que un sistema de control industrial, tales como los usados en las refinerías o en líneas de ensamblaje que tienen una distribución espacial. Lo anterior se aplica igualmente al manejo del tráfico vehicular y aéreo, cada automóvil o aeroplano es una entidad autónoma, la cual trata de alcanzar su destino final en las mejores condiciones posibles.. ii.. Los problemas son ampliamente distribuidos y heterogéneos en términos funcionales. El diseño de productos industriales así como la construcción de autos de carreras, una nave espacial o un lanzador de cohetes, requiere de la intervención de un gran número de especialistas, los cuales tienen únicamente un punto de vista muy local con respecto a todos los problemas que están envueltos en la creación de dicho sistema. Ninguno de ellos está suficientemente capacitado o posee todo el conocimiento para construirlo por sí mismo. Un auto de Fórmula 1, 27.
(43) []. por ejemplo, requiere de una gran cantidad de expertos para perfeccionar su diseño: especialistas en motores, chasis y ejes, el jefe de ingenieros, el conductor. Toda esta gente pone su conocimiento en común para tratar de hacer el mejor carro que exista. iii.. Las redes de información nos obligan a tener una visión distribuida. Nos encontramos en la edad de las redes de información intercontinental, en donde los datos y los procesos se encuentran distribuidos en una serie de sitios y servidores en todo el mundo. La red Internet por su parte, ya tiene decenas de miles de sitios Web donde acceder a la información. Debemos cambiar nuestra mentalidad de trabajo de sistemas cerrados y adaptarnos al enfoque de sistemas abiertos en donde cada computador es fijo o móvil, está conectado con otro computador en el planeta, a través de la gigantesca telaraña computacional que existe en el mundo.. iv.. La complejidad de las soluciones está relacionada con un punto de vista local. Cuando los problemas son demasiados extensos para ser analizados como un todo, las soluciones basadas en enfoques locales frecuentemente permiten llegar a soluciones más rápidamente. Así por ejemplo, el problema del tráfico aéreo es un problema global, complejo y difícil de resolver por el gran número de parámetros involucrados, al igual que la gran cantidad de restricciones que deben ser manejadas. Enfoques locales hacen posible la solución de este tipo de problemas en forma rápida, elegante y eficiente.. v.. Los sistemas deben ser capaces de adaptarse a los cambios en la estructura del ambiente. El diseño de entidades debe actualmente enfrentar los cambios en el contexto de las operaciones. Cambios por ejemplo en el ambiente, los sistemas operativos, en los manejadores de las bases de datos, en las interfaces gráficas, en la adición de nuevo hardware y software. En este contexto, los Sistemas MultiAgente, por su naturaleza distribuida y porque resuelven los razonamientos que ocurren localmente, pero sobre todo porque deciden de la existencia de agentes, incluso mientras el sistema está funcionando, son arquitecturas adecuadas para. 28.
(44) []. tomar en cuenta la capacidad de evolución y adaptación necesarias para el funcionamiento del sistema.. 2.6 DESCRIPCIÓN DE UNA ONTOLOGIA Una ontología es una especificación formal explícita de los términos de un dominio y de las relaciones entre ellos. La valoración de su empleo ha emergido de los laboratorios de la Inteligencia Artificial al ámbito del Web. Es posible considerar una versión de las ontologías como una representación de taxonomías de categorías de sitios en la Web como yahoo.com y las clasificaciones de productos con sus características tal y como se aplica en Amazon.com. De una forma más exacta, se puede decir que una ontología define un vocabulario común para usuarios quienes necesitan compartir información acerca de un dominio de conocimiento. Su contenido incluye definiciones que deben ser interpretadas a nivel “máquina” acerca de los conceptos básicos de las entidades pertenecientes al tema específico, a sus propiedades e interrelaciones con otros. Con base a esta definición, se pueden derivar los siguientes motivos que justifican el desarrollo de una ontología: • analizar el dominio de conocimiento • hacer explícitas asunciones de un dominio • habilitar el rehúso de los dominios de conocimiento • separar el dominio del conocimiento operacional de una aplicación • compartir un común entendimiento de la estructura de información entre usuarios y agentes. En un sentido filosófico la ontología se refiere a como un sistema particular de categorías registra un cierta visión del mundo, sin depender de un lenguaje particular. La ontología Aristotélica siempre es la misma independientemente del lenguaje usado para describirla,. 29.
(45) []. a esta postura se le denomina “conceptualización”. Desde el punto de vista de la Inteligencia Artificial, la ontología se refiere a un artefacto de ingeniería, compuesto por un vocabulario específico usado para describir una realidad, acompañado por suposiciones relacionadas con el significado de las palabras. Generalmente se utiliza la lógica de primer orden para representar las suposiciones, las palabras del vocabulario se editan como nombres de predicado unitarios o binarios (conceptos o relaciones, respectivamente). En su forma más simple, la ontología describe una jerarquía de conceptos asociados por relaciones subordinadas, mientras que en una forma más robusta, dispone de axiomas para expresar diversas relaciones entre conceptos y para condicionar la interpretación. Bajo estos enfoques, un par de ontologías pueden ser diferentes en el vocabulario empleado (una usa el español y la otra el ruso) pero pudieran compartir la misma conceptualización, por lo que la ontología puede ser definida como una especificación de la conceptualización, la cual resulta útil para definir cómo un agente estructura sus percepciones acerca del mundo basado en el vocabulario empleado para comunicar tales interpretaciones. De acuerdo con la postura fijada, dos agentes pueden compartir la misma conceptualización usando diferentes vocabularios. A la conceptualización no le concierne la acción de significado, solo le atañe la estructura formal de la realidad como es percibida y organizada por el agente independientemente del lenguaje usado para describirla, y la situación específica. Mientras que la ontología, es ante todo un vocabulario, al cual se le asocia significado que es aceptado por los agentes. Para clarificar el rol de la ontología, se considera un conjunto de axiomas lógicos diseñados para registrar el significado de un vocabulario. Dado un lenguaje L con K como compromiso ontológico, una ontología para L es un conjunto de axiomas diseñados en una forma que el conjunto de sus modelos se aproxime como el mejor del posible del conjunto de modelos intentados de L de acuerdo con K, (Figura 3.1), por lo que una. 30.
(46) []. ontología puede especificar una conceptualización solo en una forma indirecta, puesto que: . Sólo puede aproximar a un conjunto de modelos pensados.. . Dicho modelo sólo es una débil caracterización de conceptualizaciones.. Conceptualización. Lenguaje L. Ontologia. Modelos Pensados. Modelos M(L). Figura 2.7 Modelos pensados de un lenguaje.. Desde el punto de vista lógico, una ontología es una teoría lógica dedicada para el significado intentado de un vocabulario formal. Por ejemplo su compromiso ontológico a una conceptualización del mundo. Los modelos intentados de un lenguaje lógico usando tal vocabulario son condicionados por sus compromisos ontológicos. Una ontología refleja indirectamente su compromiso aproximándose a tales modelos intentados. Entre las principales inquietudes que aparecen durante de aplicación de las ontologías está la integración de información en la que si dos agentes adoptan el mismo vocabulario, no hay garantía que ellos logren un común acuerdo sobre cierta información a menos que ellos se comprometan a la misma conceptualización haciendo que sus respectivos modelos de conceptualización se traslapen. Área de traslape de los modelos intentados. 31.
(47) []. de lenguaje Modelo del Lenguaje M(L) Agente a, modelo intentado de lenguaje Ia(L) Agente b, modelo intentado de lenguaje Ib(L) Al suponer que los dos modelos intentados de lenguajes son aproximados por dos ontologías diferentes pudiera ser el caso que se traslaparan al tener algunos modelos en común, mientras que otros modelos intentados no. Esto significa que en un desarrollo ascendente la integración de sistemas basados en la conjugación de múltiples ontologías locales pudiera no funcionar, especialmente si solo están enfocadas sobre las relaciones conceptuales relevantes a contextos específicos y por lo tanto, ellas son representaciones a la medida de modelos intentados y por tanto son débiles. Por tal motivo, es preferible un desarrollo descendente en lugar que buscar un acuerdo basado en la intersección de diferentes ontologías, en el que los modelos de dos diferentes axiomatizaciones correspondientes a distintas ontologías pueden hacer intersección mientras que los modelos intentados no. Es importante recalcar que una ontología es un lenguaje dependiente, mientras una conceptualización es un lenguaje independiente. En resumen, se pueden concretar las siguientes definiciones: . Conceptualización.- Una estructura semántica intencional que codifica las reglas implícitas, restringiendo la estructura de una pieza de la realidad.. . Ontología Formal.- Es el desarrollo sistemático, formal y axiomático de la lógica de todas las formas y modos del ser.. . Compromiso ontológico.- Una cuenta semántica parcial de la conceptualización pensada de una teoría lógica.. . Ingeniería ontológica.- Es la rama de la ingeniería del conocimiento que explota los principios de Ontología formal para construir ontologías.. . Teoría ontológica.- Es un conjunto de fórmulas pensadas para ser siempre verdaderas, de acuerdo con una determinada conceptualización.. 32.
(48) []. . Ontología.- (Con “O” mayúscula) Es la rama de la filosofía que negocia con la naturaleza y la organización de la realidad.. . Ontología.- (Con “o” minúscula) es una teoría lógica que da una cuenta explícita y parcial de una conceptualización.. 2.6.1 Conceptualización ontológica El término de conceptualización requiere de una formalización más adecuada, puesto que ésta puede generar algunas confusiones. Este término es definido como una estructura , donde D es un dominio y R es un conjunto de relaciones relevantes sobre D. La mayor dificultad de la noción de conceptualización es que ésta se refiere a relaciones matemáticas ordinarias sobre D, es decir, relaciones extensionales. Estas relaciones reflejan un estado particular de eventos. Por ejemplo, en el mundo de los bloques, éstos pueden reflejar un arreglo particular de bloques sobre la mesa. Se necesita, en lugar de enfocarse en el significado de estas relaciones, independientemente de un estado de eventos. Por ejemplo: el significado de la relación “arriba” se sitúa en la forma que éste se refiere a determinados pares de bloques, de acuerdo con su arreglo espacial. Por lo tanto, es necesario definir relaciones intencionales, las cuales pueden llamarse relaciones conceptuales, reservando el término simple de “relación” a relaciones matemáticas ordinarias. Al representar intenciones, es tomar a estas como funciones de posibles mundos dentro de conjuntos. Mientras que las relaciones ordinarias son hechas sobre un cierto dominio, las relaciones conceptuales son definidas en un espacio de dominio, representadas por la estructura. donde D es un dominio y W es el conjunto de todos los estados. relevantes del dominio. Por ejemplo, en el caso típico de planeación de los “bloques sobre la mesa”, D puede ser el conjunto de bloques, mientras que W corresponde al conjunto de todos los posibles arreglos espaciales de los bloques sobre la mesa.. 33.
(49) []. Dado un espacio de dominio sobre. , se define una relación conceptual ρ n de aridad n. como una función total. desde W dentro del conjunto de. todas las n relaciones ordinarias sobre D. Para una relación conceptual genérica p, el conjunto. contendrá las. extensiones admisibles de p. Una conceptualización para D es definida como una cadena , en donde. es el conjunto de relaciones conceptuales sobre. .. Por tanto una conceptualización es un conjunto de relaciones conceptuales sobre un espacio de dominio. Al considerar la estructura. es referida a un mundo en particular, se puede. apreciar que la “estructura de mundo” establecida por la conceptualización es: , para cada posible mundo C es la estructura. , la correspondiente estructura de acuerdo con , donde. extensiones (relativas a w) de los elementos de. es el conjunto de , por lo que se denota Sc al conjunto. todas las estructuras del mundo intentadas para C. Al considerar un lenguaje lógico L, con un vocabulario V, se define un modelo para L como una estructura. en donde. es una estructura del mundo,. es una función que asigna elementos de D a símbolos constantes de V, y elementos de R a símbolos de predicados de V; ya que un modelo ofrece una interpretación de extensión particular del lenguaje. De la misma forma, se establece un interpretación intencional por medio de la estructura donde. es una conceptualización y. es una función. de asignación de elementos de D a símbolos constantes de V, y elementos de. a. símbolos predicados de V; la cual se conoce como una interpretación intencional de un compromiso ontológico para L. Si. es un compromiso ontológico para L, entonces L satisface a C por medio. de K, mientras que C es la conceptualización base de K1.. 34.
Figure

+7



Documento similar
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
