ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
“DESARROLLO Y ANÁLISIS CINÉMÁTICO DE UN BRAZO
ROBÓTICO PARA LA SELECCIÓN DE PIEZAS”
PROYECTO DE INVESTIGACIÓN
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN
MAYA SANTOS MANUEL
FONSECA MUCIÑO RAÚL
ASESORES
DR ALEJANDRO TONATIU VELÁZQUEZ SÁNCHEZ
M. EN C. MARTÍN ENRÍQUEZ SOBERANES
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
REPORTE TÉCNICO
INGENIERO EN CONTROL Y AUTOMATIZACIÓN QUE PARA OBTENER EL TITULO DE
POR LA OPCiÓN DE TITULACIÓN PROYECTO DE INVESTIGACIÓN REG. SIP20091185
DEBERA(N) DESARROLLAR C. MANUEL MAYA SANTOS
C. RAÚL FONSECA MUCIÑO
"DESARROLLO Y ANÁLISIS CINEMATICO DE UN BRAZO ROBOTICO PARA LA SELECCIÓN DE PIEZAS"
DESARROLLAR UN BRAZO ROBÓTICO y LA PROPUESTA DE UN ARREGLO DE SENSORES PARA
MANIPULAR OBJETOS PREVIAMENTE PROGRAMADOS, ADEMAS DE REALIZAR EL CÓDIGO FUENTE DE UN PROGRAMA, QUE NOS PERMITA OBTENER EL RESULTADO DE LA CINEMÁTICA DIRECTA, LA CINEMÁTICA INVERSA Y LA GENERACIÓN DE TRAYECTORIAS PARA UN ROBOT MANIPULADOR DE 5 GDL.
セ PROPONER UN ARREGLO DE SENSORES QUE AYUDARÁN A LA MANIPULACIÓN DE PIEZAS EN EL EFECTOR FINAL DEL BRAZO ROBÓTICO.
セ PROGRAMACIÓN DEL BRAZO ROBÓTICO y LOS SENSORES DEL EFECTOR FINAL, MEDIANTE EL USO DE SISTEMAS EMBEBIDOS, PARA LA MANIPULACIÓN DE PIEZAS ESPECÍFICAS.
セ DESARROLLO DEL CÓDIGO FUENTE DE UN PROGRAMA EN EL SOFTWARE MATLAB QUE REALICE EL CÁLCULO DE LA CINEMÁTICO DIRECTA E INVERSA Y LA
GENERACIÓN DE TRAYECTORIAS.
MÉXICO D.F., 26 DE FEBRERO 2010.
セエuゥieAゥᄀ[ ,
DR. ALEJANDRO T VELÁZQUEZ snセセセセ[セセHZP_N
セZLN_G HLヲZサセエェ[ヲ[GセセGセセ
Q NセL "\ (" セ .... , "".' u.." C> -e
|セセゥセWᄃヲAAj
ING. JOSÉ L M JÍA DOMÍNGUEZ I Pi\!
Fonseca Muciño Raúl I
DESARROLLO Y
ANÁLISIS CINEMATICO
DE UN BRAZO
OBJETIVOS.
Objetivo general: Desarrollar un brazo robótico y la propuesta de un arreglo de sensores para manipular objetos previamente programados, además de realizar el código fuente de un programa, que nos permita obtener el resultado de la cinemática directa, la cinemática inversa y la generación de trayectorias para un robot manipulador de 5 GDL
Objetivos específicos:
Proponer un arreglo de sensores que ayudaran a la manipulación de piezas en el efector final del brazo robótico.
Programación del brazo robótico y los sensores del efector final, mediante el uso de sistema embebidos, para la manipulación de piezas específicas.
Fonseca Muciño Raúl III
JUSTIFICACIÓN:
En el campo de la robótica son muchas las aplicaciones que precisan de un sistema sensorial integrado en la herramienta del manipulador, como se presenta durante el agarre de objetos grandes o de piezas de diferentes dimensiones, el ensamble de piezas industriales, agarre localizado para procesos de soldadura en el sector automotriz, sistemas que evaden obstáculos y sistemas de inspección, entre muchos otros.
Los procesos antes mencionados necesitan sistemas y leyes de control que les permitan llevar acabo de manera precisa las funciones para las que fueron programados, el diseño de leyes de control para robots manipuladores de grados de libertad requiere el conocimiento previo de su modelo, a su vez, es necesario un algoritmo de generación de trayectorias el cual requiere el conocimiento de los modelos cinemáticos del robot, estos son pues indispensables en el desarrollo de un sistema de control para robots manipuladores.
Por lo antes mencionado, debemos tomar en cuenta, que nunca existirá una solución única para un problema especifico, por lo que se debe elegir la solución de una gama de posibilidades que mejor responda a las necesidades, tanto de rapidez, exactitud, seguridad y economía; sin caer en la exageración utilizando sistemas que sobrepasen nuestras especificaciones, ya que esto provoca gastos innecesarios en el futuro.
ALCANCE.
Fonseca Muciño Raúl V
PLANTEAMIENTO DEL PROBLEMA.
Desde siempre el ser humano a intentado medir y analizar en forma confiable la cantidad y calidad de las cosas que lo rodean, que son importantes para mejorar la vida, por ello han creado mecanismos semejantes a sus extremidades superiores llamados manipuladores; que lo pueden reemplazar en trabajos tediosos y donde se requiere mejorar la cantidad y calidad de la producción.
HIPÓTESIS
Fonseca Muciño Raúl VII
CONTENIDO
Objetivos………II Justificación..………III Alcance……….IV Planteamiento del problema………...V Hipótesis………...VI Contenido……….VII
CAPITULO I ESTADO DEL ARTE
1.1 Antecedentes históricos……….……….2
1.2 Evolución de la robótica………....……….6
1.2.1 Tipos de configuraciones en los robots…….………...………8
1.2.2 Aplicaciones y configuraciones de los robots...………..…...………12
1.2.3 Avances de la robótica en otras áreas………..………..15
1.3 La robótica en México y en el mundo……….………..……..16
CAPITULO II MARCO TEÓRICO 2.1 Robótica industrial………..….21
2.2 Esquema general del sistema de un robot industrial……….………..………….21
2.3 Robots manipuladores……….….22
2.3.1 Sistema básico de un robot manipulador………..………...……..23
2.3.2 Sensores y sistemas de control………..……….……23
2.4 Cinemática de los robots manipuladores……….……….24
2.4.1 Cinemática directa………....….…….26
2.4.1.1 Algoritmo de Denavit- Hartenberg para la obtención del modelo……...……30
2.4.2 Cinemática inversa………..………...31
2.5 Generación de trayectorias……….…. 34
2.5.1 Generación de trayectorias para manipuladores……..……..……….………36
2.5.2 Trayectorias articulares para manipuladores robóticos…………..…..………….38
2.6 Sensores táctiles……….…………..38
2.6.3 Aplicación a la robótica de agarre con sensores resistivos……...……….39
2.7 Sistemas embebidos……….………39
2.7.1 Componentes de un sistema embebido………..…..………….……….40
2.7.2 Microcontroladores dentro de los sistemas embebidos………..…….….………..40
2.8 Control de motores de corriente continua (motores de CC)……….……….….…….41
2.8.1 Motores CC (motores de corriente continua)………..……….…….….41
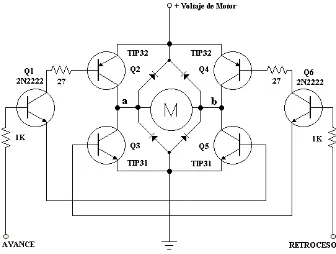
2.8.2 Circuitos electrónicos para el control de sentido de giro para motores de corriente continúa……..……….……….…..42
2.8.3 Modulador de ancho de pulso “PWM”………..………43
2.9.1 Composición del servomotor……….45
2.9.2 Funcionamiento del servomotor……….46
CAPITULO III CINEMÁTICA Y DESARROLLO DEL BRAZO ROBÓTICO 3.1 Estructura del brazo robótico………...………49
3.1.1 Espacio de trabajo del robot manipulador………..52
3.1.2 Movimiento de las articulaciones………...53
3.1.2.1 Movimiento de la cadera………..54
3.2 Análisis cinematico del robot manipulador………..55
3.2.1 Establecimiento de los parámetros de Denavit-Hartemberg………..55
3.2.2 Cinemática directa………..57
3.2.3 Cinemática inversa……….62
3.2.4 Generación de trayectorias……….70
CAPITULO IV IMPLEMENTACIÓN 4.1 Elemento final gripper………..75
4.2 Fuerzas que actúan en el gripper………..77
4.2.1 Las fuerzas de rozamiento……….78
4.3 Sujeción por forma y rozamiento……….80
4.3.1 Análisis de fuerzas para el gripper……….83
4.4 Sensores táctiles FSR………...84
4.4.1 Montaje de los FSR en el efector final………..86
4.4.2 Diagrama de flujo para la identificación de piezas………87
4.5 Desarrollo de la interfaz………88
CAPITULO V CONCLUSIONES 5.1 Conclusiones finales………..…90
Glosario……...………..91
Bibliografía…...……….96
Índice de figuras………97
Índice de tablas………..98
ANEXOS Anexo A Planos de las partes del brazo manipulador……….…99
Anexo B Código fuente de los programas en Matlab………...114
1.1
Antecedentes Históricos.
La imagen del robot como máquina a semejanza con el ser humano ha prevalecido en las culturas desde hace muchos siglos, el afán por fabricar máquinas capaces de realizar tareas independientes ha sido una constante en la historia, a través de la que se han descrito infinidad de ingenios, antecesores directos de los actuales robots.
Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses, estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses; los griegos construyeron estatuas que operaban con sistemas hidráulicos los cuales se utilizaban para fascinar a los adoradores de los templos.
La palabra robot es de origen eslavo, en ruso “robota” significa trabajo, en checo significa trabajo forzado, en 1921 el escritor checo Karol Capek escribió Rossums Universal Robots, una obra teatral que obtuvo gran éxito en Broadway, en esta obra unos androides trabajan
más del doble que un ser humano.
Entre los escritores de ciencia ficción, Isaac Asimov contribuyó con varias narraciones relativas a robots, comenzó en 1939, a él se atribuye el acuñamiento del término robótica, la imagen de robot que aparece en su obra es el de una máquina bien diseñada y con una seguridad garantizada que actúa de acuerdo con tres principios.
Estos principios fueron denominados por Asimov las Tres Leyes de la Robótica, y son: 1. Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser
humano sufra daños.
2. Un robot debe de obedecer las órdenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.
3. Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las dos primeras leyes.
[image:12.612.236.376.540.701.2]En 1495, Leonardo Da Vinci había imaginado el concepto de robot; un autómatacreado a
partir de una armadura medieval ítalo-germana de caballero, las notas de diseño fueron encontradas en 1950, pero no se sabe si Leonardo alguna vez intentó construir el prototipo, gracias a los planos, se cree que el robot sería capaz de realizar movimientos humanos; podría haberse sentado, mover los brazos, cuellos y la quijada.
Fue diseñado cuando Leonardo da Vinci era joven, en su estancia en Milán y para recreo en fiestas de la alta alcurnia, Leonardo Da Vinci, creyó poder representar de forma mecánica el cuerpo humano, disponiendo un conjunto de poleas y cuerdas que harían de esqueleto y músculos y que se moverían de forma autómata.
Fig. 1.2 Automata creado por Leonardo Da Vinci
El inicio de la robótica actual puede fijarse en la industria textil del siglo XVIII, cuando Joseph Jacquard inventa en 1801 una máquina textil programable mediante tarjetas perforadas, en la cual, esencialmente se trataba de robots mecánicos diseñados para un propósito específico y la diversión.
En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos, una serie de levas se utilizaban como “el programa” para el dispositivo en el proceso de escribir y dibujar, estas creaciones mecánicas de forma humana deben considerarse como inversiones aisladas que reflejan el genio de hombres que se anticiparon a su época.
La revolución industrial impulsó el desarrollo de estos agentes mecánicos, entre los cuales se destacaron el torno mecánico motorizado de Babbitt (1892) y el mecanismo programable para pintar con spray de Pollard y Roselund (1939).
El primer brazo articulado (o “manipulador”) fue construido por Harold Roselund de la compañía Debilvis, ahora desaparecida, en 1938; se usaba para pintar con spray, está por demás decir que en aquella época no existían computadoras digitales por lo que la programación de una tarea era altamente engorrosa por lo cual este manipulador no tuvo éxito.
Inicialmente, se definía un robot como un manipulador reprogramable y multifuncional diseñado para trasladar materiales, piezas, herramientas o aparatos a través de una serie de movimientos programados para llevar a cabo una variedad de tareas.
El desarrollo en la tecnología, donde se incluyen las poderosas computadoras electrónicas, los actuadores de control retroalimentados, transmisión de potencia a través de engranes, y
la tecnología en sensores han contribuido a flexibilizar los mecanismos autómatas para desempeñar tareas dentro de la industria.
Son varios los factores que intervienen para que se desarrollaran los primeros robots en la década de los 50's, la investigación en inteligencia artificial desarrolló maneras de emular el procesamiento de información humana con computadoras electrónicas e inventó una variedad de mecanismos para probar sus teorías.
Las primeras patentes aparecieron en 1946 con los muy primitivos robots para traslado de maquinaria de Devol, también en ese año aparecen las primeras computadoras. J. Presper Eckert y John Maulchy construyeron la ENAC en la Universidad de Pensilvania y la primera máquina digital de propósito general se desarrolla en el MIT.
El primer robot móvil de la historia pese a sus muy limitadas capacidades, fue ELSIE (Electro-Light-Sensitive Internal-External), construido en Inglaterra en 1953, ELSIE se limitaba a seguir una fuente de luz utilizando un sistema mecánico realimentado sin incorporar inteligencia adicional.
En 1954, Devol diseña el primer robot programable y acuña el término "autómata universal", que posteriormente recorta a Unimation, así llamaría Engleberger a la primera compañía de robótica, la comercialización de robots comenzaría en 1959, con el primer modelo de la Planet Corporation que estaba controlado por interruptores de fin de carrera. En 1968, apareció SHACKEY del SRI (Standford Research Institute), que estaba provisto de una diversidad de sensores así como una cámara de visión y sensores táctiles y podía desplazarse por el suelo, el proceso se llevaba en dos computadores conectados por radio, uno a bordo encargado de controlar los motores y otro remoto para el procesamiento de imágenes.
A partir de 1965 varios centros importantes de investigación tales como MIT, SRI, etc. empezaron la investigación en robótica y áreas asociadas, en 1970 se construyo en el SRI un manipulador con 6 grados de libertad controlado por computador y con control de movimiento por bucle cerrado PID con servomotores de corriente continua; hasta entonces todos los robots manipuladores tenían actuadores hidráulicos.
El primer robot controlado por microcomputador fue producido por Cincinnati milacron en 1973, en 1978 Unimation Desarrollo el PUMA (iníciales de Programmable Universal Macine for Assembling).
En los ochenta aparece el CART del SRI que trabaja con procesado de imagen estéreo, más una cámara adicional acoplada en su parte superior, también en la década de los ochenta, el CMU-ROVER de la Universidad Carnegie Mellon incorporaba por primera vez una rueda timón, lo que permite cualquier posición y orientación del plano.
Otros desarrollos Importantes en la historia de la robótica son:
En 1960 se introdujo el primer robot "Unimate'', basada en la transferencia de artículos, programada de Devol, utilizan los principios de control numérico para el
control de manipulador y era un robot de transmisión hidráulica.
En 1961 se vendió a la General Motors el primer robot, un “Unimate”, que ya fue
retirado después de trabajar durante 50 años, (en años hombre equivalentes a 100,000 horas.
En 1964 se abren laboratorios de investigación en inteligencia artificial en el MIT, el SRI (Stanford Research Institute) y en la universidad de Edimburgo, poco después los japoneses que anteriormente importaban su tecnología robótica, se sitúan como pioneros del mercado.
En 1966 Trallfa, una firma noruega, construyó e instaló un robot de pintura por pulverización.
En 1971 El "Standford Arm'', un pequeño brazo de robot de accionamiento eléctrico, se desarrolló en la Standford University.
En 1973 Se desarrolló en SRI el primer lenguaje de programación de robots del
tipo de computadora para la investigación con la denominación WAVE, fue seguido por el lenguaje AL en 1974, los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Víctor Scheinman y Bruce Simano. En 1978 Se introdujo el robot PUMA (Programmable Universal Machine for Assambly) para tareas de montaje por Unimation, basándose en diseños obtenidos en un estudio de la General Motors.
1.2 Evolución de la Robótica.
Actualmente, el concepto de robótica ha evolucionado hacia los sistemas móviles autónomos, que son aquellos capaces de desenvolverse por sí mismos en entornos desconocidos y parcialmente cambiantes, sin necesidad de supervisión, para lograr esto la robótica utiliza sistemas de control mas exactos y avanzados.
Encontrar el control más eficiente para un manipulador es una de las tareas más importantes en la robótica moderna, a este tipo de robots generalmente se les demanda elevadas prestaciones de velocidad y precisión de movimiento, el control dinámico debe procurar que las trayectorias sean seguidas fielmente por el robot
El modelo dinámico de los manipuladores antropomórficos son fuertemente no lineales, multivariables, acoplados y de parámetros variables, lo que hace del diseño de control para este tipo de mecanismos sea muy complejo, en la práctica se realizan simplificaciones para facilitar el diseño de control, aunque limitando ciertas características de movimiento del robot, el uso de técnicas mas robusta puede mejorar este problema pero el costo computacional aumenta considerablemente.
En la actualidad existen técnicas de control convencional tanto lineales como no lineales, que pueden ser utilizadas para robots antropomórficos, en el caso del control lineal, el manipulador debe restringir su funcionamiento a rangos pequeños de movimiento donde se pueda suponer que el comportamiento del mismo es lineal, en el otro caso, el no se restringe el rango de movimiento del robot, pero son métodos mas costosos de utilizar y en ambos casos se comportan bien ante modelos dinámicos bien conocidos.
Existen técnicas de control adaptativo no inteligentes, entre las mas conocidas: control adaptativo por planificación de ganancias, que consiste en dividir el funcionamiento del robot en varios rangos de operación definidos por posición y carga del manipulador y para cada uno de estos rangos realizar un sistema de control convencional, este tipo de
controlador presenta como principal dificultad que pueden existir muchísimos puntos de
funcionamiento, complicando excesivamente el diseño del mismo. Control adaptativo con modelo de referencia (MRAC), este tipo de controlador de un modelo de referencia, que es muy difícil de elegir, que tiene un comportamiento ideal, el comportamiento instantáneo del modelo real y el modelo deseado son utilizados para adaptar el controlador.
Otra familia de controladores adaptativos son los controladores inteligentes el diseño de estos controladores tienen como ventaja principal que no es necesario conocer completamente la planta, incluso en algunos casos esta puede ser completamente desconocida, las técnicas de este tipo mas conocidas son lógica difusa, que requiere el
También están las técnicas híbridas, ANFIS, P-CMAC, PID difuso, H-infinito difuso, que combinan redes neuronales con lógica difusa o bien técnicas convencionales con lógica difusa.
Las redes neuronales se adaptan a los cambios de la planta, pero su costo computacional es generalmente grande, es por eso que los artículos que indican haber sido probados en sistemas reales, tales como robots antropomórficos, son relativamente nuevos.
Otro de los campos en los que debemos poner atención, es en la teleoperación, que es el conjunto de disciplinas que permiten a un operador manejar un dispositivo remoto mediante el uso de un dispositivo local, la teleoperación fue motivada por la industria nuclear, que debía tener a los operarios en lugares seguros de radiación en tanto se realizaba el trabajo. Ahora los sistemas teleoperados tienen reflexión de fuerza, para que el operario tenga una sensación de lo que ocurre en el ambiente remoto, este tipo de sistemas se llaman sistemas con realimentación bilateral, los distintos esquemas de realimentación bilateral son:
1. Posición - Posición: La posición del dispositivo esclavo es determinada a partir de la posición del dispositivo maestro.
2. Fuerza - Posición: La posición del dispositivo esclavo se determina a partir de la posición del dispositivo maestro, pero existe una reflexión de fuerza del dispositivo esclavo al maestro.
3. Fuerza - Fuerza: La posición de ambos dispositivos se determina por la lectura de los sensores fuerza de cada uno de ellos y existe también un control de posición para cada dispositivo.
4. Cuatro canales: Existe un intercambio de señales de posición y fuerza entre los dispositivos, es el esquema que más transparencia puede dar al operario.
Cuando los retardos de comunicación son muy grandes entre el dispositivo maestro y el esclavo en este tipo de sistemas, el sistema se vuelve inestable, una solución planteada es utilizar visualizadores predicativos, que consisten en que el operador trabaja sobre un ambiente virtual ubicado localmente sin retrasos, que simula lo que ocurre instantes de tiempo después con el dispositivo esclavo, cuando los retardos no son tan grandes, de unos pocos segundos es posible realizar un bucle de realimentación, aunque la el dispositivo esclavo debe tener cierto nivel de autonomía.
Otra tecnología que esta usando mucho la robótica para modernizar los manipuladores industriales, es el reconocimiento de objetos mediante visión artificial, es uno de los campos que tiene el futuro más prometedor dentro de la industria, las aplicaciones son muchas y van entrando poco a poco en las líneas de producción a medida que los sistemas y
algoritmos de visión van mejorando día a día tanto en su velocidad como en su eficacia.
La posibilidad de aplicar la visión computacional en la industria permite reemplazar al humano en las tareas más monótonas y alienantes del proceso productivo, generalmente en las tareas de inspección para control de calidad, selección, clasificación, etc. donde el cansancio y la monotonía del trabajo realizado hacen mella en su eficacia.
Las técnicas de visión y reconocimiento automático de objetos tienen una vinculación muy importante con la Robótica, pero son necesarios algoritmos rápidos y efectivos que permitan determinar la posición, distancia, dimensiones de múltiples objetos con los que va a interactuar el robot, como ejemplos tenemos: el posicionamiento de componentes en la industria de la electrónica, la perfecta posición de las obleas de silicio para realizar el corte en la industria de los semiconductores, la soldadura de determinados puntos en la industria del automóvil, etc.
Las soluciones de la visión computacional para cada aplicación, pueden ser más o menos complicadas dependiendo de múltiples factores, actualmente no existe, y probablemente no existirá, una solución única general para todo problema que se plantee, debido a que cada situación a resolver tiene sus propias dificultades que hay que solventar, la forma de llegar a conseguir un sistema práctico que solucione el problema planteado, consiste en aplicar aquellas técnicas de entre todas las conocidas, que mejor se adecuen tanto en efectividad del reconocimiento como en velocidad.
El aspecto de la velocidad es en este caso muy importante ya que, prácticamente en cualquier aplicación industrial, se requiere un sistema que funcione en tiempo real, para ello es necesario estudiar todos los métodos posibles y la forma de realizarlos con la menor carga computacional, es decir, el menor tiempo de procesado que nos permita acercarnos a una eficiencia óptima.
Actualmente la visión computacional, está en fase de crecimiento, dada la enorme complejidad de ésta se van solucionando por etapas problemas cada vez más complicados, actualmente las líneas de estudio e investigación se dividen en múltiples campos, desde la visión tridimensional, visión con moción, a la segmentación y agrupamiento de múltiples objetos diferentes en entornos no controlados, etc.
1.2.1Tipos de configuraciones en los robots.
La arquitectura, definida por el tipo de configuración general del robot, puede ser metamórfica, el concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la flexibilidad funcional de un robot a través del cambio de su configuración por el propio robot, el metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de efector final), hasta los más complejos como el cambio o
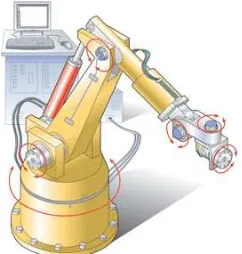
Poli Articulados.- Bajo este grupo están los robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad.
En este grupo se encuentran los manipuladores, los robots industriales, los robots cartesianos, algunos robots industriales y se emplean cuando es preciso abarcar una zona de trabajo relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o deducir el espacio ocupado en el suelo.
Fig. 1.3 Robot poli-articulado
Móviles.- Son robots con gran capacidad de desplazamiento, basados en carros o
plataformas y dotados de un sistema locomotor de tipo rodante, siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores.
Estos robots aseguran el transporte de piezas de un punto a otro de una cadena de fabricación, guiados mediante pistas materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
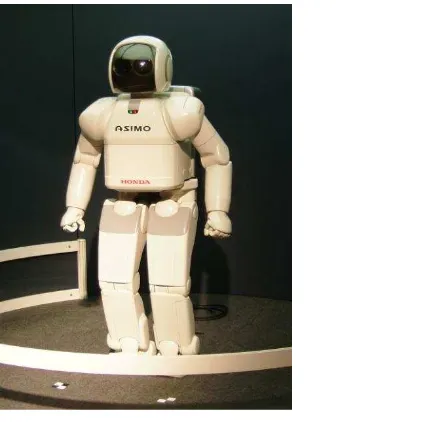
Androides.- Son robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemática del ser humano, actualmente los androides son todavía dispositivos muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación.
[image:20.612.237.448.207.418.2]Uno de los aspectos más complejos de estos robots y sobre el que se centra la mayoría de los trabajos, es el de la locomoción bípeda, en este caso, el principal problema es controlar dinámica y coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del robot.
Fig. 1.5 Androide Asimo
Zoomórficos.- Los robots zoomórficos, que considerados en sentido no restrictivo
podrían incluir también a los androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos, a pesar de la disparidad morfológica de sus posibles sistemas de locomoción es conveniente agrupar a los robots zoomórficos en dos categorías principales: caminadores y no caminadores.
Fig. 1.6 Robot zoomórfico. El perro AIBO diseñado por Sony
Híbridos.- Estos robots corresponden a aquellos de difícil clasificación cuya
estructura se sitúa en combinación con alguna de las anteriores ya expuestas, por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo uno de los atributos de los robots móviles y de los robots zoomórficos, de igual forma pueden considerarse híbridos algunos robots formados por la yuxtaposición
de un cuerpo formado por un carro móvil y de un brazo semejante al de los robots industriales, en parecida situación se encuentran algunos robots antropomorfos y que no pueden clasificarse ni como móviles ni como androides, tal es el caso de los robots personales.
Fig. 1.7 Robot hibrido
Robot Industrial (Robot Manipulador).- Son máquinas programables de uso
general que tiene algunas características antropomórficas o “humanoides”, las características humanoides más típicas de los robots actuales es la de sus brazos móviles, los que se desplazarán por medio de secuencias de movimientos que son programados para la ejecución de tareas de utilidad.
1.2.2 Aplicaciones y Configuraciones de los robots.
En la actualidad se ha generalizado el uso de robots manipuladores en muchas aplicaciones que requieren movimientos repetitivos sencillos, pero la industria automovilística, que fue en un principio la pionera en el uso de robots, continua siendo la que más los usa, siendo
los tipos principales de aplicación los siguientes: soldadura de puntos, pintura “spray”,
manipulación de partes de la carrocería, chasis y motor. En ninguna de estas aplicaciones es necesario el uso de un sistema de visión, siempre y cuando se organice el trabajo en forma tal que las partes a soldar, pintar, etc. se encuentren siempre en el lugar determinado en el momento preciso.
Tres aplicaciones mencionadas requieren distintas herramientas (efector final) y forma de programación:
a) Soldadura de puntos: en este caso la herramienta usada al extremo del brazo es una pinza de soldar por puntos, el robot se programa generalmente por medio de una
“caja de enseñanza” (teacher box) para que soldé siguiendo un camino determinado y actuando la pinza cada cierto número de centímetros, las partes a soldar deben estar en la posición correcta o el robot soldara en puntos desplazados.
La caja de enseñanza tiene un teclado con el cual pueden controlarse las articulaciones y actuar la herramienta de trabajo en la secuencia deseada por el operador, las señales producidas por el operador se van entrando en la memoria del microcomputador controlador del brazo y pueden ser después repetidas un numero cualquiera de veces.
b) Pintura “Spray”: la herramienta de trabajo es una pistola de pintar, el movimiento
no es de punto a punto, sino continúo, en este caso es mas practico tener una réplica de peso ligero y tamaño natural del robot, con los mismos sensores que este, un operario especializado mueve la pistola como si estuviera pintado y los movimientos van entrando, a través de los sensores, a la memoria del microprocesador.
Al terminar la tarea, el robot real se conecta al microprocesador de control y los movimientos son replicados fielmente, debido al método de programación descrito,
se usa el término “leading by the nose” en ingles, o sea “guiar por la nariz”.
Un manipulador tiene en general 5 o 6 grados de libertad, de los cuales tres corresponden
al brazo mismo y los otros a la “mano”, las configuraciones más usadas en la práctica son
cuatro: cartesiana, cilíndrica, angular y polar.
Configuración Cartesiana: Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z, los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales, interpolación, en este caso, significa el tipo de trayectoria que realiza el manipulador cuando se desplaza entre un punto y otro, a la trayectoria realizada en línea recta se le conoce como interpolación lineal y a la trayectoria hecha de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama interpolación por articulación.
Fig. 1.9 Configuración cartesiana para un Robot
Configuración cilíndrica: Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad, el robot de configuración cilíndrica está diseñado para ejecutar los movimientos conocidos como interpolación lineal e interpolación por articulación, la interpolación por articulación se lleva a cabo por medio de la primera articulación, ya que ésta puede realizar un movimiento rotacional.
Configuración polar: Tiene varias articulaciones, cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal; este robot utiliza la interpolación por articulación para moverse en sus dos primeras articulaciones y la interpolación lineal para la extensión y retracción.
Fig. 1.11 Configuracion polar para un Robot
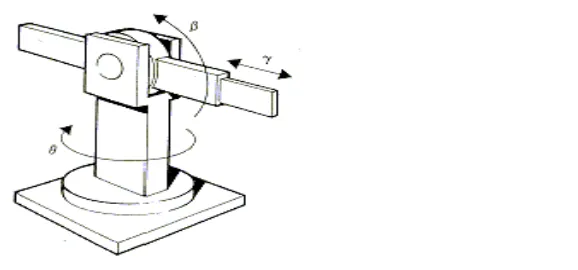
[image:24.612.234.523.139.274.2] Configuración angular (o de brazo articulado): Presenta una articulación con movimiento rotacional y dos angulares, aunque el brazo articulado puede realizar el movimiento llamado interpolación lineal (para lo cual requiere mover simultáneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolación por articulación, tanto rotacional como angular, además de las cuatro configuraciones clásicas mencionadas, existen otras configuraciones llamadas no clásicas.
Fig. 1.12 Configuracion angular de brazo articulado
Fig. 1.13 Configuración SCARA para un Robot
1.2.3 Avances de la robótica en otras áreas.
Existen robots manipuladores, como los brazos que brindan varios grados de libertad a los astronautas para hacer reparaciones y experimentos en el espacio, algunos imitan el comportamiento de los insectos, hay octópodos y hexápodos de varios materiales y robots que imitan a las serpientes, que se usan en exploraciones dentro de tuberías, también hay bípedos, monópodos y robots de busto, que pueden tener reconocimiento visual y de voz, y procesan información, pero tienen la limitación de estructura, el grupo que quizás sea el más conocido por su aspecto, que semeja la figura humana corresponde a los androides. La rama de la medicina es una de las más beneficiadas con la generación y mejoras de los robots, una de las cuales es el robot Da Vinci, lo último en tecnología médica, viene de la mano del robot cirujano al cual sus creadores han bautizado como Da Vinci. Da Vinci, tiene 800 “robots similares” repartidos en varias partes del mundo y han sido
fabricados por el Intuitive Surgical, quienes han dicho que hasta la fecha dicho robot ha realizado 500 mil operaciones de las cuales no se ha registrado ninguna muerte hasta el momento.
Da Vinci posee 7 grados de libertad de movimientos, es decir, puede realizar 117,649 movimientos, esto es el 0.019% del total de la capacidad del brazo del ser humano, esta cifra es muy superior comparada con los 3 grados de libertad y 729 movimientos que podemos realizar con los instrumentos de cirugía laperiscópica convencional, y que representa el 0.00012% del total de la capacidad del brazo humano y 0.61 % de la capacidad del robot Da Vinci.
Si el cirujano necesita un mayor grado de detalle de la zona a intervenir, el sistema puede aumentar hasta en 20 veces la imagen original o incluso, resaltar de forma automática una determinada zona, todo ello, sin una perceptible pérdida de nitidez además, este tercer brazo, permite al cirujano cambiar, mover y rotar fácilmente el campo visual del endoscopio, lo que representa una enorme ventaja para el médico, por último, la cuarta extremidad de la máquina, se dedica a la realización de las tareas propias de un asistente de quirófano, separando tejidos durante la operación, o suturando con enorme habilidad las heridas de las incisiones.
Fig.1.14 Robot cirujano Da Vinci
1.3 La Robótica en México y en el Mundo.
Los manipuladores son utilizados para diversas aplicaciones, entre las que se cuentan: la industria automotriz, como soldadoras y ensambladoras, la industria espacial, lugares donde la presencia humana se hace riesgosa, como manipulación de material nuclear y/o químico, desarrollo de tareas en sitios de difícil alcance, etc.
Las áreas de aplicación como porcentaje del total de la población de robots, según datos de RIA (Robotics Industries Association):
Soldadura por Puntos 29%
Actividades de Corte 20%
Soldadura por Arco Eléctrico 12%
Remoción de Material 06%
Ensamble 03%
Soldadura por Arco Eléctrico 38%
Soldadura por Puntos 22%
Manipulación y Transporte 15%
Tareas Menos Comunes 15%
Aplicación de Pintura 10%
Durante el período de 2005 a 2008, la Federación Internacional de Robots (IFR por sus siglas en inglés) opina, a través de varios de sus reportes publicados, que esta industria presenta importantes crecimientos, aunque la demanda para los robots dentro de la industria del automóvil en Europa, Norteamérica y Japón puede disminuir, todavía existe una demanda creciente en todos los mercados de manufactura en el mundo.
Como resultado de los progresos tecnológicos, crecerán por todo el mundo las instalaciones de robots en la industria en general, especialmente la industria de envase y embalaje, el sector alimenticio, la industria de maquinaria, la industria del caucho y plásticos.
Además, las mejoras en la tecnología de robots, tales como los nuevos sistemas de control y los sistemas de seguridad, que permiten operaciones interactivas más confiables entre el hombre y la máquina, y las mejoras en los sensores de visión, impulsarán el aumento del número de futuras instalaciones de robots, el mercado mundial de robots industriales ha proyectado un crecimiento de 95,400 unidades vendidas en 2004 a 121,000 en el año 2008, con un crecimiento promedio anual de 6.1%.
Para el mes de septiembre de ese año, únicamente las compañías norteamericanas solicitaron un total de 12,763 robots, valuados en $844,5 millones de dólares, lo cual representó un aumento del 33% en unidades y el 21% en valor respecto del mismo período en 2006, si se incluyen las órdenes de compra de empresas extranjeras, las ventas totales para las compañías norteamericanas fabricantes de robots sumaron 13,866 unidades valuadas en $905,6 millones de dólares, un salto del 34% en volumen y el 22% en valor.
Tanto la RIA como la IFR, coinciden en que actualmente en Estados Unidos están trabajando unos 180,000 robots, lo cual coloca a este país en segundo lugar después de Japón donde operan unos 355 mil, ambas instituciones, estiman que el número de robots industriales operando en todo el mundo aumentará de 848.000 unidades en el año 2004 a un millón en el 2008, representando un índice de crecimiento anual promedio de 5.3%.
No existen estudios previos al que aquí presentamos sobre el mercado de Robots y Automatización en México, sin embargo, en base a nuestras estadísticas, en el Instituto Mexicano del Plástico Industrial estimamos que para finales del 2009 habrá aproximadamente 12,000 unidades de robots industriales instalados en México, de los cuales más del 70% se encuentran en el sector automotriz.
[image:28.612.231.387.558.698.2]Asimismo, se calcula que alrededor de 600 empresas son las principales usuarias de robots de distintas formas, tamaños y modelos que hay en el país, generalmente se trata de empresas transnacionales que los integraron para mantener la competitividad de su planta o por decisión del corporativo para automatizar sus procesos.
Fig. 1.16 Robot manipulador de ABB (ABB México)
Debido a la rápida evolución hoy, los robots son demasiado exitosos y demasiado económicos para ignorarlos, y desde el punto de vista de competitividad, debemos esperar el desarrollo de nuevos productos cada vez más rápidos, y en la mayoría de los casos con calidad más alta y precios de venta inferiores, según muchos expertos, un robot está disponible hoy por el 20% del precio que tenía en los años 70´s, y tienen una capacidad en general mucho más extensa que la disponible hace 30 años.
Hoy en día ya son comunes los controladores para multi-robot, y algunas unidades se construyen con dos brazos sobre la misma base, la movilidad y la flexibilidad para acciones de elevación, desplazamiento, visión y otros movimientos, así como los dispositivos de sensor, permiten que los robots puedan utilizarse en equipos viejos de modos nuevos y diferentes.
“En esta época de altos costos de energía, desequilibrios comerciales y luchas vigorosas
para ganar participación de mercado, los robots son una de las pocas opciones que los países desarrollados y en vías de desarrollo, como México, tienen para ser competitivos
ante la competencia de las naciones emergentes manufactureras”, (según Alex Kramer)
De la mano de los robots no hay que temer el futuro, ya que “el futuro para la industria será más brillante en la medida en que más compañías comiencen a considerar el potencial de la
robótica y las tecnologías relacionadas con la automatización de sus operaciones”
Capítulo II
2.1 Robótica Industrial.
En la robótica industrial se trata fundamentalmente de dotar de flexibilidad a los procesos
manteniendo al mismo tiempo la productividad que se consigue con una máquina automática especializada; la robótica industrial, desde sus orígenes estuvo muy orientada a las funciones de manipulación, de hecho, suele considerarse que un robot industrial es esencialmente un robot manipulador.
Los robots industriales surgen de la convergencia de tecnologías del control, de la automatización, del control de máquinas herramientas, de los manipuladores tele-operados y de la aplicación de computadoras en tiempo real.
Mediante el control y la automatización de procesos se pretende concebir y realizar ingenios que permitan gobernar un proceso sin la intervención de agentes exteriores, especialmente humanos, en particular, se presenta el problema de seguimiento automático de señales de referencia mediante servosistemas; estos servosistemas generan automáticamente señales de control que tratan de anular la diferencia entre la señal de referencia y la señal medida en el proceso u objeto que se pretende controlar.
Tanto los servosistemas como los reguladores se basan en el principio de la retroalimentación, las señales de referencia se comparan con medidas de variables del proceso u objeto que se pretende controlar y su diferencia se emplea para generar acciones de control sobre el propio proceso u objeto en los sistemas de control automático esta cadena cerrada de acción-medida-acción se realiza sin intervención del hombre tradicionalmente, en la realización de sistemas de control automático se han empleado diversas tecnologías tales como la neumática, hidráulica y posteriormente, la eléctrica.
2.2 Esquema general del sistema de un Robot Industrial.
Desde el punto de vista del procesamiento de la información, en robótica se involucran funciones de control de movimientos, percepción y planificación, en un sentido amplio, el sistema de control involucra tantos bucles de retroalimentación de la información
suministrada por los sensores internos, como del entorno.
Los sensores internos miden el estado de la estructura mecánica y giros o desplazamientos relativos entre articulaciones, velocidades, fuerzas y pares, estos sensores permiten cerrar bucles o ciclos de control de las articulaciones de la estructura mecánica.
Los sensores externos permiten dotar de sentidos al robot, la información que suministran es utilizada por el sistema de percepción para aprehender la realidad del entorno, los sistemas de percepción sensorial hacen posible que un robot pueda adaptar automáticamente su comportamiento en función de las variaciones que se producen en su entorno, haciendo frente a situaciones imprevistas, para ello el sistema de control del robot incorpora bucles o ciclos de retroalimentación sensorial del entorno, generando automáticamente acciones en función de la comparación de dicha información sensorial con patrones de referencia.
El desarrollo de sistemas de percepción en robótica surge a partir de los progresos tecnológicos en sensores tales como los de visión, tacto e incluso de audición, pero la percepción involucra no solo la captación de la información sensorial, sino también su tratamiento e interpretación, por lo cual, es necesario realizar una abstracción a partir de un cierto conocimiento previo del entorno; es claro que la complejidad de la percepción artificial depende de lo estructurado que este dicho entorno.
2.3 Robots Manipuladores.
La mayor parte de los robots industriales actuales son esencialmente brazos articulados, según la definición del “Robot Institute of America”, un robot industrial es “Un
manipulador programable multifuncional diseñado para mover materiales, piezas, herramientas o dispositivos especiales, mediante movimientos variados, programados
para la ejecución de distintas tareas”.
Fig. 2.2 Robot Manipulador de ABB (ABB México).
2.3.1 Sistema básico de un robot manipulador.
Un robot manipulador operando individualmente necesita como mínimos los siguientes componentes:
a) El brazo (robot) consistente en un sistema de articulaciones mecánicas (eslabones,
engranajes, transmisión por cadena o correa), actuadores (motores eléctricos o hidráulicos) y sensores de posición usados en el sistema de control de bucle cerrado.
b) El controlador, generalmente basado en microcomputador, que recibe las señales
de los sensores de posición y envía comandos a la fuente de potencia controlada (o unidad conversora).
c) La unidad conversora de potencia que alimenta los motores que actúan las articulaciones.
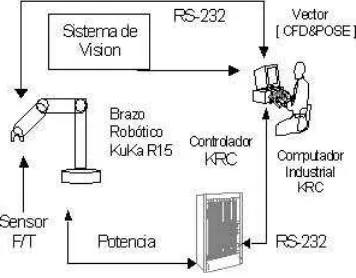
Dependiendo del tipo de aplicación, un robot puede contar también con sensores externos, de los cuales el más poderoso es un sistema de visión consistente en cámara de video, interfaz y microcomputadora procesadora de imágenes, la información obtenida por este sistema pasa al microcontrolador que controla el robot y es usado para dirigir el
[image:33.612.218.396.377.516.2]movimiento de este, sin embargo este sistema de visión en la industria no siempre resulta el mas adecuado, por su costo, complejidad, etc. Por lo que se toman en cuenta opciones más sencillas y económicas que cumplan con las necesidades del proceso, unas de estas opciones es el sistema de detección táctil a base de sensores.
Fig 2.3 Sistema Basico de un Robot Manipulador
2.3.2 Sensores y Sistemas de Control.
El segundo nivel de control se ocupa de la generación de trayectorias, entendiendo por tal la evolución del órgano terminal cuando se desplaza de una posición a otra, el generador de trayectorias debe suministrar a los servomecanismos las referencias apropiadas para conseguir la evolución deseada del órgano terminal a partir de la especificación del movimiento deseado en el espacio de la tarea, para obtener las referencias que corresponden a las articulaciones en un determinado punto del espacio de trabajo, es necesario resolver el modelo geométrico inverso que es no lineal.
Los niveles superiores se ocupan de la comunicación con el usuario, interpretación de los programas, percepción sensorial y planificación, en la robótica industrial se han integrado los progresos en el control por computadora, entre estos destacan los trabajos de Shannon y Minsky que, en 1958 propusieron un dispositivo al que denominaron “Sensor-Controlled
robot”, que consistía en un teleoperador equipado con distintos sensores conectados a una computadora que le suministraba información suficiente para decidir las acciones necesarias en orden a alcanzar un determinado objetivo, aunque el dispositivo no llego a realizarse motivo a otros investigadores tales como Ernest en 1961, que en su tesis doctoral en el MIT, construyo un robot con sensores de tacto en la mano, que podía ser programado para realizar tareas tales como la localización, agarre y transporte y descarga de pequeñas piezas en cajas, este robot puede ser considerado como el primero controlado mediante sensores externos, se programaba mediante instrucciones parecidas a las de un lenguaje ensamblador, incorporando órdenes relativas a la información de los sensores de tacto.
Se progresa en métodos de cálculo de trayectorias con generación de referencias a los servos de las articulaciones en lenguajes de programación de mayor nivel, que incorporan primitivas relaciones con sensores de percepción del entorno y especificación de movimientos en coordenadas cartesianas. Por lo que respecta a la planificación de caminos libres de obstáculos, el método típico se basa en construir una estructura de datos que represente la geometría del espacio de trabajo o las restricciones existentes.
Conviene poner de manifiesto las importantes demandas en teoría de control, sistemas de
percepción y aprendizaje, sistemas informáticos en tiempo real, y nuevos mecanismos, que se requieren para resolver los problemas planteados por el control de estructuras articuladas y la manipulación de objetos.
Se han aplicado también técnicas de control tales como las basadas en redes neuronales, y otras estructuras de control inteligente, que están permitiendo resolver problemas que son
de elevada complejidad con métodos tradicionales.
2.4 Cinemática de los Robots Manipuladores.
cuál es la posición y orientación del extremo final del robot con respecto a un sistema de coordenadas que se toma como referencia, conocidos los valores de las articulaciones y los parámetros geométricos de los elementos del robot; el segundo denominado problema cinemático inverso, resuelve la configuración que debe adoptar el robot para una posición y orientación del extremo conocidas. Denavit y Hartenberg propusieron un método sistemático para descubrir y representar la geometría espacial de los elementos de una cadena cinemática, y en particular de un robot, con respecto a un sistema de referencia fijo, este método utiliza una matriz de transformación homogénea para descubrir la relación espacial entre dos elementos rígidos adyacentes, reduciéndose el problema cinemático directo a encontrar una matriz de transformación homogénea 4 X 4 que relacione la localización espacial del robot con respecto al sistema de coordenadas de su base.
Por otra parte, la cinemática del robot trata también de encontrar las relaciones entre las velocidades del movimiento de las articulaciones y las del extremo, esta relación viene dada por el modelo diferencial expresado mediante la matriz Jacobiana.
Cinemática directa = = >
Valor de las coordenadas
Articulares (q0, q1, ... qn)
Posición y orientación del extremo del robot
(x, y, z, , ß, )
< = = Cinemática inversa
Tabla 2.1 Diagrama entre Cinemática Directa e Inversa.
El movimiento relativo en las articulaciones resulta en el movimiento de los elementos que posicionan la mano en una orientación deseada, en la mayoría de las aplicaciones de robótica, se esta interesado en la descripción espacial del efector final del manipulador con respecto a un sistema de coordenadas de referencia fija.
Para aumentar la destreza en las repeticiones de los robots se usan las coordenadas redundantes para definir tareas adicionales, el mando de configuración está surgiendo como una manera eficaz de controlar los movimientos de un robot que tiene más grados de libertad y en el cual es necesario definir la trayectoria del efector del extremo y / o el objeto para ser manipulado, pueden usarse los grados extras o redundantes de libertad para dar destreza de robot y versatilidad, en mando de configuración, la configuración del robot se representa matemáticamente por un juego de variables de configuración que son un vector de coordenadas generalizado y que es más pertinente a la tarea global que es el vector de coordenadas de la articulación, que aparecen en los acercamientos convencionales a controlar.
El vector de la coordenada generalizada consiste en las coordenadas del efector del extremo, en el espacio de la tarea, más varias funciones de cinemática que involucran grados redundantes de libertad, la tarea básica del sistema de control es hacer las coordenadas del efector del extremo seguir la trayectoria deseada, las funciones de la cinemática pueden seleccionarse para definir una tarea adicional por ejemplo, la anulación de obstáculos u optimización de la cinemática para reforzar la manipulación, en efecto la tarea adicional define la trayectoria en los grados redundantes de libertad, las variables de configuración pueden usarse en un esquema de control adaptable que no exige manipular el conocimiento del modelo matemático complicado de la dinámica del robot o los parámetros del objeto.
2.4.1 Cinemática Directa.
Se utiliza fundamentalmente el álgebra vectorial y matricial para representar y describir la localización de un objeto en el espacio tridimensional con respecto aun sistema de referencia fijo, dado que un robot se puede considerar como una cadena cinemática formada por objetos rígidos o eslabones unidos entre sí mediante articulaciones, se puede establecer un sistema de referencia fijo situado en la base del robot y describir la localización de cada uno de los eslabones con respecto a dicho sistema de referencia, de esta forma, el problema cinemático directo se reduce a encontrar una matriz de transformación homogéneaT que relacione la posición y orientación del extremo del robot
respecto del sistema de referencia fijo situado en la base del mismo, esta matriz T será función de las coordenadas articulares.
Un sistema de control de un robot causa a un manipulador remoto, seguir una trayectoria de referencia estrechamente en un marco de referencia cartesiano en el espacio de trabajo, sin el recurso a un modelo matemático intensivo de dinámica del robot y sin el conocimiento del robot y parámetros de carga; el sistema, derivado de la teoría lineal multivariable, utiliza a los manipuladores delanteros relativamente simples y controladores de retroalimentación con modelo adaptable de referencia del control.
El sistema requiere dimensiones de posición y velocidad del extremo del manipulador o efector, estos pueden obtenerse directamente de los sensores ópticos o por cálculo, que utiliza las relaciones de la cinemática conocidas entre el manipulador modelado y el extremo de la juntura de la posición del efector, derivando las ecuaciones de control las ecuaciones diferenciales no lineales acopladas a la dinámica del robot, expresan primero la forma general de la cinemática, entonces la liberalización por cálculo de perturbaciones sobre una especifica operación del punto en las coordenadas cartesianas del extremo del efector.
El modelo matemático resultante es un sistema multivariable lineal de orden de 2n (donde n = número de coordenadas espaciales independientes del manipulador) esto expresa la relación entre los incrementos del actuador de n voltajes de control (las entradas) y los incrementos de las coordenadas de n, la trayectoria de extremo del efector (los rendimientos), la trayectoria del efector incrementa la referencia, la trayectoria se incrementa: esto requiere la retroalimentación independiente y controladores de manipulación; para este propósito, le basta aplicar posición y retroalimentación de velocidad a través de la matriz de n x n posición y velocidad, la matriz de ganancia de retroalimentación.
La resolución de la cinemática directa consiste en encontrar las relaciones que permiten conocer la localización espacial del extremo del robot a partir de los valores de sus coordenadas articulares.
Así, si se han escogido coordenadas cartesianas y ángulos de Euler para representar la
posición y orientación del extremo de un robot de seis grados de libertad, la solución al problema cinemático directo vendrá dada por las relaciones:
x = Fx ( q1,q2,q3,q4,q5,q6 ) y = Fy ( q1,q2,q3,q4,q5,q6 )
z = Fz ( q1,q2,q3,q4,q5,q6 ) (2.1)
= F( q1,q2,q3,q4,q5,q6 ) ß = Fß ( q1,q2,q3,q4,q5,q6 )
= F( q1,q2,q3,q4,q5,q6 )
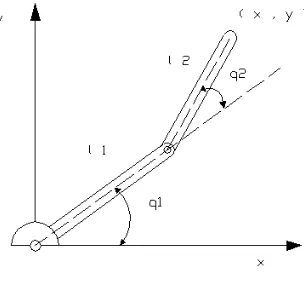
La obtención de estas relaciones no es en general complicada, siendo incluso en ciertos casos (robots de pocos grados de libertad) fácil de encontrar mediante simples consideraciones geométricas, por ejemplo, para el caso de un robot con 2 grados de libertad es fácil comprobar que:
X = I1 cosq1 + I2 cos( q1 + q2 )
Y = I1 cosq1 + I2 cos( q1 + q2 ) (2.2) Para robots de más grados de libertad puede plantearse un método sistemático basado en la utilización de las matrices de transformación homogénea, en general un robot de n grados de libertad está formado por “n” eslabones unidos por “n” articulaciones, de forma que
[image:38.612.235.387.447.588.2]cada par articulación-eslabón constituye un grado de libertad, a cada eslabón se le puede asociar un sistema de referencia solidario a el y utilizando las transformaciones homogéneas, es posible representar las rotaciones y traslaciones relativas entre los distintos eslabones que componen el robot.
Fig. 2.7 Asociación de referencia
Del mismo modo, denominando 0Ak a las matrices resultantes del producto de las matrices (i-1)Ai con i desde 1 hasta k, se puede representar de forma total o parcial la cadena cinemática que forma el robot, así por ejemplo, la posición y orientación del sistema solidario con el segundo eslabón del robot con respecto al sistema de coordenadas de la base se puede expresar mediante la matriz 0A2:
0A2 = 0A1 ( 1A2 ) (2.3)
De manera análoga, la matriz 0A3 representa la localización del sistema del tercer eslabón: 0A3 = 0A1 ( 1A2 )( 2A3 ) (2.4)
Cuando se consideran todos los grados de libertad, a la matriz 0An se le suele denominar T, así dado un robot de seis grados de libertad, se tiene que la posición y orientación del eslabón final vendrá dada por la matriz T:
T = 0A6 = 0A1 ( 1A2 )( 2A3 )( 3A4 )( 4A5 )( 5A6 ) (2.5) Aunque para descubrir la relación que existe entre dos elementos contiguos se puede hacer uso de cualquier sistema de referencia ligado a cada elemento, la forma habitual que se suele utilizar en robótica es la representación de Denavit-Hartenberg.
Denavit-Hartenberg propusieron en 1955 un método matricial que permite establecer de manera sistemática un sistema de coordenadas (Si) ligado a cada eslabón i de una cadena articulada, pudiéndose determinar a continuación las ecuaciones cinemáticas de la cadena completa.
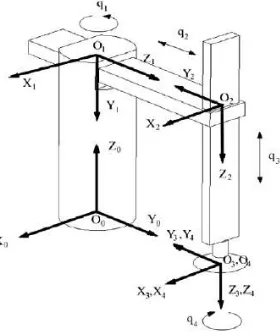
Fig. 2.8 Sistemas de Coordenadas de Denavit-Hartenberg
Según la representación D-H, escogiendo adecuadamente los sistemas de coordenadas asociados para cada eslabón, será posible pasar de uno al siguiente mediante 4 transformaciones básicas que dependen exclusivamente de las características geométricas del eslabón.
1 0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 0 0 1 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 0 0 i i i i i i i i i i c s s c a d c s s c 1 0 0 0
0 i i i
i i i i i i i i i i i i i i d c s s a c s c c s c a s s s c c
Las transformaciones en cuestión son las siguientes: 1) Rotación alrededor del eje Zi-1 un ángulo .
2) Traslación a lo largo de Zi-1 una distancia di; vector di ( 0,0,di ). 3) Traslación a lo largo de Xi una distancia ai; vector ai ( 0,0,ai ). 4) Rotación alrededor del eje Xi, un ángulo i.
Dado que el producto de matrices no es conmutativo, las transformaciones se han de realizar en el orden indicado. De este modo se tiene que:
( 1, ) ( 1, ) ( , ) ( , ) 1 i i i i i i i i i i x R a x D d z D z R
A
(2.6) Y realizando el producto de matrices:
(2.7)
(2.8)
Donde i, ai, di,i, son los parámetros D-H del eslabón i, de este modo, basta con
identificar los parámetros i, ai, di, i, para obtener matrices A y relacionar así todos y cada
uno de los eslabones del robot, como se ha indicado, para que la matriz i-1Ai, relacione los sistemas (Si) y (Si-1), es necesario que los sistemas se hayan escogido de acuerdo a unas determinadas normas, estas junto con la definición de los 4 parámetros de Denavit-Hartenberg, conforman el siguiente algoritmo para la resolución del problema cinemático directo.
2.4.1.1 Algoritmo de Denavit- Hartenberg para la obtención del modelo.
DH1.Numerar los eslabones comenzando con 1 (primer eslabón móvil de la cadena) y acabando con n (ultimo eslabón móvil), se numerara como eslabón 0 a la base fija del robot.
DH2.Numerar cada articulación comenzando por 1 (la correspondiente al primer grado de libertad y acabando en n).
DH4.Para ir de 0 a n-1, situar el eje Zi, sobre el eje de la articulación i+1.
DH5.Situar el origen del sistema de la base (S0) en cualquier punto del eje Z0, los
ejes X0 e Y0 se situaran dé modo que formen un sistema dextrógiro con Z0.
DH6.Para ir de 1 a n-1, situar el sistema (Si) (solidario al eslabón i) en la
intersección del eje Zi con la línea normal común a Zi-1 y Zi, si ambos ejes se
cortasen se situaría (Si) en el punto de corte, si fuesen paralelos (Si) se situaría en la
articulación i+1.
DH7.Situar Xi en la línea normal común a Zi-1 y Zi.
DH8.Situar Yi de modo que forme un sistema dextrógiro con Xi y Zi.
DH9.Situar el sistema (Sn) en el extremo del robot de modo que Zn coincida con la
dirección de Zn-1 y Xn sea normal a Zn-1 y Zn.
DH10.Obtener Өi como el ángulo que hay que girar en torno a Zi-1 para que Xi-1 y
Xi queden paralelos.
DH11.Obtener Di como la distancia, medida a lo largo de Zi-1, que habría que
desplazar (Si-1) para que Xi y Xi-1 quedasen alineados.
DH12.Obtener Ai como la distancia medida a lo largo de Xi (que ahora coincidiría
con Xi-1) que habría que desplazar el nuevo (Si-1) para que su origen coincidiese con
(Si).
DH13.Obtener ai como el ángulo que habría que girar entorno a Xi (que ahora
coincidiría con Xi-1), para que el nuevo (Si-1) coincidiese totalmente con (Si).
DH14.Obtener las matrices de transformación i-1Ai.
DH15.Obtener la matriz de transformación que relaciona el sistema de la base con
el del extremo del robot T = 0Ai, 1A2... n-1An.
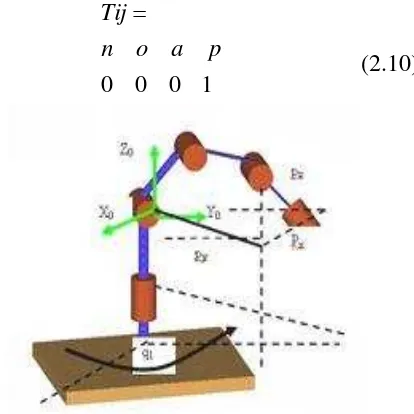
DH16.La matriz T define la orientación matriz de rotación) y posición
[image:41.612.238.378.437.605.2](sub-matriz de traslación) del extremo referido a la base en función de las n coordenadas articulares.
Fig. 2.9 Sistema de referencia según Denavit-Hartenberg.
2.4.2 Cinemática Inversa.
Así como es posible abordar el problema cinemático directo de una manera sistemática a partir de la utilización de matrices de transformación homogéneas, e independientemente de la configuración del robot, no ocurre lo mismo con el problema cinemático inverso, siendo el procedimiento de obtención de las ecuaciones fuertemente dependiente de la configuración del robot.
Fig. 2.10 Relaciones de Cinemática Inversa para encontrar los valores que deben adoptar las coordenadas articulares del robot
Se han desarrollado algunos procedimientos genéricos susceptibles de ser programados, de modo que una computadora pueda, a partir del conocimiento de la cinemática del robot (con sus parámetros de DH, por ejemplo) obtener el conjunto de valores articulares que posicionan y orientan su extremo, el inconveniente de estos procedimientos es que se trata de métodos numéricos iterativos, cuya velocidad de convergencia e incluso su convergencia
en si no está siempre garantizada.
A la hora de resolver el problema cinemático inverso es mucho más adecuado encontrar una solución cerrada. Esto es, encontrar una relación matemática explicita de la forma:
, , , , , (x y z Fk
qk K= 1…..n (grados de libertad). (2.9)
Este tipo de solución presenta, entre otras, las siguientes ventajas:
1) En muchas aplicaciones, el problema cinemático inverso ha de resolverse en tiempo real (por ejemplo, en el seguimiento de una determinada trayectoria), una solución de tipo iterativo no garantiza tener la solución en el momento adecuado.