Instituto Politécnico Nacional
Escuela Superior de Ingeniería Mecánica y Eléctrica
Sección de Estudios de Posgrado e Investigación
DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE
CONTROL PARA LA ORIENTACIÓN DE UN
CONCENTRADOR SOLAR
CILINDRO-PARABÓLICO ESTE-OESTE
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
PRESENTA:
ING. LIZBETH SALGADO CONRADO
DIRIGIDA POR:
M. EN C. CÁNDIDO PALACIOS MONTÚFAR
RESUMEN
En este trabajo se propone el diseño y la implementación de un sistema para el control de la orientación de un concentrador solar cilindro-parabólico. El control de orientación permite enfocar la superficie reflectora perpendicular a los rayos del Sol, para captar la mayor cantidad de energía y aumentar la captación del concentrador.
El concentrador solar cilindro-parabólico es un mecanismo de un grado de libertad constituido a base de perfiles tubulares de diferentes calibres. Se encuentra apoyado y soportado sobre dos chumaceras en cada extremo, separadas 6.50 m y los ejes de ambas chumaceras son coaxiales, éstas a su vez están fijas en torres de soporte a una altura de 2.5 m.
El perfil parabólico se construyó también, colocando lámina de acero inoxidable del tipo 304 con acabado espejo sobre perfiles de PTR, con forma de parábola previamente establecida. La línea focal de esta parábola coincide con el eje de giro del concentrador solar. Es importante mencionar que se tienen 3 módulos solares con una superficie de 24 m2 cada uno, por lo cual se tiene una superficie total de calentadores de 72 m2.
El control de orientación del ángulo azimutal de este sistema mecánico se lleva a cabo con ayuda de un seguidor solar comercial. El sensor de este instrumento manda la señal al PLC (S7-200 Siemens), el PLC a su vez manda una señal al mecanismo ejecutor del movimiento, donde una electroválvula activa al sistema de orientación por desplazamiento de agua, que hace girar a todo el concentrador solar el ángulo deseado.
Este mecanismo ejecutor, cuya patente está en trámite, consiste de dos recipientes de agua de 60 litros con una capacidad de llenado al 50% y un motor en cada uno de ellos, se bombea agua de un recipiente a otro dependiendo de la necesidad de orientación.
Con el objeto de caracterizar el sistema, se estableció un modelo dinámico, el cual balancea las fuerzas y momentos generados por el peso del agua, el peso del concentrador solar, el momento de inercia del concentrador, considerando a este sistema mecánico como un péndulo.
Se ha realizado el control para un módulo, ya que los otros concentradores solares han sido conectados en paralelo para emplear la misma señal de orientación.
ABSTRACT
This paper proposes the design and the implementation of a system for the control and orientation of a cylinder-parabolic solar concentrator. The turning control allows focusing on the reflective surface perpendicular to the sun´s rays, to capture more energy and increase the uptake of the concentrator.
The cylinder-parabolic solar concentrator is a mechanism of one degree of freedom, which was built with tubular profiles of different caliber. This is supported on two bearings at each end separated 6.50m and the axes of both bearing are coaxial, these in turn are fixed to support towers to a height of 2.5m.
The parabolic profile built by placing the stainless steel sheet type 304 with mirror end on profiles of flawing PTR with form of parable previously established. The focal line of the parable coincides with the axis of rotation of the solar concentrator. It is important to mention that there are three solar modules with a superface of 24 m2 each one, thus having a superface of 72m2.
The control of orientation of the azimuth angle of this mechanical system, is carried out using a commercial solar tracker. The sensor of this instrument sends a signal to the PLC (S7-200 Siemens), turn the PLC sends another signal at the executing mechanism of movement, where a solenoid actives the system of turning by water displacement turns around the solar concentrator a desired angle.
This executing mechanism, which patent is in process, consists of two containers of water of 60 liters, with a capacity of filling of 50% with one motor in each one of them; the water is pumped of a container to another depending on the need for turning.
In order to characterize more deeply the system, it was established a dynamic model, that balances the forces and moments generated by the weight of water, the weight of solar concentrator, the inertial moment of it, considering the mechanical system as a pendulum.
The control was made by a solar module, as the other solar concentrators have been connected in parallel to use the same turning signal.
TABLA DE CONTENIDO
Pág.
Resumen………... i
Abstract………. iii
Tabla de contenido………... v
Índice de figuras………... vii
Índice de tablas………. x
Índice de gráficas……….. xi
Simbología……… xii
Objetivo General……….. xv
Justificación………... xvi
Definición del problema……… xvii
CAPÍTULO I ESTADO DEL ARTE 1.1 Concentradores solares……….… 2
1.1.1 Ventajas del empleo de concentradores solares……….... 3
1.1.2 Desventajas del empleo de concentradores solares………... 3
1.2 Antecedentes históricos……….... 4
1.3 Tipos de seguidores solares……….. 10
1.3.1 Seguidores de un eje……….. 10
1.3.2 Seguidores de dos ejes……….…. 11
CAPÍTULO II MODELO DINÁMICO DE UN CONCENTRADOR SOLAR CILINDRO-PARÁBOLICO 2.1 Parámetros geométricos……….... 14
2.2 Componentes del concentrador solar cilindro-parabólico………..…... 18
2.2.1 Perfiles parabólicos……….... 19
2.2.2 Marcos del concentrador……….….. 23
2.2.3 Soleras del concentrador solar………..…. 25
2.2.4 Lámina……….….. 29
2.2.5 Base del tensor del concentrador……….…. 31
2.2.6 Base de los porrones……….…. 34
2.2.7 Porrones o contenedores de agua……….……. 39
2.2.8 Bomba de agua de los porrones………..…... 40
2.2.9 Ejes……….…... 41
2.2.10 Soportes del concentrador……….….. 42
2.2.11 Tensores………..……. 43
2.2.12 Tubos absorbentes……….…….. 43
2.2.13 Contenedores de agua fría……….……. 45
2.2.14 Contenedores de agua caliente………..….. 45
2.3 Momentos de inercia total del concentrador solar cilindro-parabólico………... 46
CAPÍTULO III
DISEÑO Y CONSTRUCCIÓN DE UN SITEMA DE CONTROL POR DESPLAZAMIENTO DE AGUA
3.1 Descripción general del sistema de calentamiento de agua en el concentrador solar……... 60
3.2 Orientación del concentrador solar………... 65
3.3 Componentes del sistema de control para la orientación del concentrador solar por desplazamiento de agua……….. 67
3.3.1 Sensor solar……….... 67
3.3.2 PLC……….. 75
3.3.2.1 CPU 222………. 76
3.3.2.2 Entradas analógicas EM231……… 79
3.3.2.3 Contactor LC1D12BD……… 81
3.3.2.4 Visualizador de textos TD 200………... 84
3.3.2.5 Configuración del TD 200 EN STEP7 MICRO/WIN………... 85
3.4 Programa de orientación en el PLC y conexiones………....90
CAPÍTULO IV ANÁLISIS DE RESULTADOS 4.1 Condiciones de operación del concentrador solar……… 94
4.2 Análisis de los resultados obtenidos ………. 95
4.3 Consideraciones geométricas del foco de los concentradores solares cilindro-parabólicos 128 4.4 Aspectos económicos del concentrador solar cilindro-parabólico………130
Conclusiones……… 131
Trabajos futuros……….. 132
Apéndice A Código del programa en Matlab………. 133
Apéndice B Detalle de piezas del concentrador solar……… 159
Apéndice C Teoría de los PLC‟s………. 174
Apéndice D Diagramas eléctricos del controlador del sensor solar……… 200
Apéndice E Diagramas de control en Matlab………. 204
ÍNDICE DE FIGURAS
Pág.
Figura 1.1 Concentradores solares A) CCP, B) CRS, C) DP………... 3
Figura 1.2 Esquema general del colector solar……….... 6
Figura 1.2 A) Ubicación del seguidor solar en la estructura del concentrador, B) Vista lateral del sensor del seguidor y principio de funcionamiento………... 6
Figura 1.3 Montaje experimental para la prueba con tira bimetálica………... 7
Figura 1.4 A) Sistema de seguimiento solar para el cual se diseñó el circuito de control, B) Sistema experimental usado para la calibración del circuito electrónico……… 8
Figura 1.5 Mecanismos planos usados en la orientación de paneles solares………... 9
Figura 1.6 Sistema de seguimiento milimétrico de la trayectoria solar……… 10
Figura 2.1 Fotografía del concentrador solar cilindro-parabólico……… 13
Figura 2.2 Componentes del concentrador CCP……….. 14
Figura 2.3 Concentradores solares instalados en una superficie de 150m2……….. 15
Figura 2.4 Parábola del concentrador solar………16
Figura 2.5 Eje de giro del concentrador……… 18
Figura 2.6 Ejes paralelos……….. 19
Figura 2.7 A) Configuración de los seis perfiles parabólicos en vista isométrica realizado en el paquete Mechanical Desktop 6 Power Pack ® demo, B) Fotografía de los perfiles parabólicos del concentrador solar en construcción...………..20
Figura 2.8 A) Vista frontal, B) Vista inferior, C) Medidas de un perfil parabólico……… 21
Figura 2.9 Cilindro parabólico sólido……….. 22
Figura 2.10 Marcos del concentrador solar……….. 23
Figura 2.11 Fotografía de los marcos del concentrador solar……….. 23
Figura 2.12 Referencias de medidas de los marcos 1 y 2 para los momentos de inercia……… 24
Figura 2.13 Referencias de medidas de los marcos 3 y 4 para los momentos de inercia……… 24
Figura 2.14 A) Vista isométrica del concentrador solar y B) Vista superior (soleras enumeradas)………..26
Figura 2.15 Fotografía de las soleras del concentrador solar……… 27
Figura 2.16 A) Medidas de soleras de la 1 a la 5 y de la 21 a la 25, B) Medidas de soleras de la 5 a la 20……… 28
Figura 2.17 Fotografía de la lámina de acero inoxidable del concentrador solar cilindro-parabólico……….29
Figura 2.18 Representación de la lámina de acero inoxidable #304 en Mechanical Desktop® 2004 demo………30
Figura 2.19 Medidas de la lámina de acero inoxidable #304 acabado espejo……….. 31
Figura 2.20 Fotografía de la base del tensor y el cable tensor del concentrador solar lado derecho………. 32
Figura 2.21 Base del tensor……….. 32
Figura 2.22 Base del tensor izquierdo y derecho……….. 33
Figura 2.23 Fotografía de la base de los porrones para el concentrador solar lado izquierdo…. 34 Figura 2.24 Base de los porrones para el concentrador solar lado izquierdo y derecho…………34
Figura 2.25 Piezas que integran la base del porrón……….. 35
Figura 2.26 Fotografía del porrón lado izquierdo………. 39
Figura 2.27 Bomba de agua del porrón………. 41
Figura 2.28 Fotografía del eje del concentrador solar cilindro-parabólico………41
Figura 2.29 Eje frontal y posterior del concentrador solar cilindro-parabólico……… 41
Figura 2.30 Fotografía de los soportes del concentrador solar………. 43
Figura 2.32 Fotografía de los tubos absorbentes del concentrador solar………... 44
Figura 2.33 Fotografía de los tubos absorbentes del concentrador solar en los tres módulos….. 44
Figura 2.34 Fotografía de los contenedores de agua fría……….. 45
Figura 2.35 Fotografía de los contenedores de agua caliente……… 45
Figura 2.36 A) Péndulo simple en reposo, B) Concentrador solar en reposo, C) Péndulo simple desplazado un ángulo y D) Concentrador solar orientado a un ángulo ………… 47
Figura 2.37 Diagrama del péndulo a) posición de equilibrio estable, b) Péndulo con un ángulo ………. 48
Figura 2.38 Diagrama de cuerpo libre del concentrador solar………... 48
Figura 2.39 Modelo dinámico del concentrador solar con en la posición inicial de 30°.. 49
Figura 2.40 Comportamiento del concentrador solar con en la posición inicial de 30°.. 50
Figura 2.41 Control proporcional………... 51
Figura 2.42 Comportamiento del concentrador solar utilizando un controlador Proporcional. 51 Figura 2.43 Comportamiento del torque con un controlador Proporcional……….. 52
Figura 2.44 Comportamiento del error con un controlador Proporcional………. 52
Figura 2.45 Control proporcional derivativo………. 53
Figura 2.46 Posición y Velocidad angular del concentrador con un controlador Proporcional Derivativo……….53
Figura 2.47 Gráfica del error para un controlador PD……….. 54
Figura 2.48 Control proporcional integral derivativo……… 54
Figura 2.49 Gráfica de la posición y velocidad angular del concentrador solar con un control PID………... 55
Figura 2.50 Gráfica del error con un control Proporcional Integral Derivativo………. 55
Figura 2.51 Torque aplicado al concentrador solar cilindro-parabólico para una posición de 0° a 60°………... 56
Figura 2.52 Fotografía de los porrones del concentrador solar………. 56
Figura 2.53 Control de nivel de fluido en el porrón derecho……….57
Figura 3.1 Esquema general de la instalación de los concentradores solares………61
Figura 3.2 Esquema del flujo de agua que se desea calentar a 60°c para uso doméstico………. 62
Figura 3.3 Esquema del flujo de agua de la alberca que se desea calentar ……….. 63
Figura 3.4 Esquema de los detalles de la tubería del concentrador solar……….. 64
Figura 3.5 Fotografía del concentrador solar cilindro-parabólico………. 65
Figura 3.6 Diagrama del concentrador solar cilindro-parabólico……….. 65
Figura 3.7 Flujo de agua del porrón izquierdo al porrón derecho………. 66
Figura 3.8 Flujo de agua del porrón derecho al porrón izquierdo………. 66
Figura 3.9 Sensor solar………. 67
Figura 3.10 Esquema del sensor solar ……….. 68
Figura 3.11 Fotografía del controlador de seguimiento……….69
Figura 3.12 Diagrama de ubicación de los componentes del controlador de seguimiento………70
Figura 3.13 Pines de conexión de la compuerta LM2901D……….. 72
Figura 3.14 Circuito que controla la latitud hacia arriba UP………. 73
Figura 3.15 Circuito que controla la latitud hacia abajo (DOWN)………74
Figura 3.16 Estructura interna del PLC ………... 75
Figura 3.17 Partes del CPU 222……….76
Figura 3.18 Conexiones generales de voltaje de la CPU 222………77
Figura 3.19 Fotografía del cable de conexión PC/PPI………...78
Figura 3.20 Selector del PLC Siemens S7-200………..78
Figura 3.21 Módulo de expansión de salidas analógicas EM231………..79
Figura 3.22 Conexiones del módulo de expansión de entradas analógicas EM231 ……… 80
Figura 3.25 Interruptor sencillo de un solo polo (SPST)……….. 81
Figura 3.26 Interruptor doble de un solo polo (SPDT)……….82
Figura 3.27 Interruptor sencillo de polo doble (DPST)………. 82
Figura 3.28 Interruptor doble de polo doble (DPST)……….83
Figura 3.29 Principales componentes del TD 200………. 84
Figura 3.30 Configuración punto a punto………..85
Figura 3.31 Abrir el asistente del visualizador de textos en Micro/WIN SP5 V4.0 STEP 7 demo……… 85
Figura 3.32 Introducción del asistente del TD 200………86
Figura 3.33 Modelo y versión del TD 200……….86
Figura 3.34 Idioma y juego de caracteres……….. 87
Figura 3.35 Botones del teclado del TD 200………. 87
Figura3.36 Asignación de la memoria……….. 88
Figura 3.37 Menú personalizado………89
Figura 3.38 Mensaje del TD 200 al inicio del proceso………. 89
Figura 3.39 Mensaje al finalizar el proceso de orientación de los concentradores solares………90
Figura 3.40 Conexiones del PLC……….. 92
Figura 4.1 Concentradores solares C1,C2 y C3……….94
Figura 4.2 Fotografía de la colocación del Sensor Solar en el Concentrador Solar……….. 94
Figura 4.3 Medición del ángulo en el concentrador solar……… 107
Figura 4.4 Posicionamiento de los porrones con respecto al Este-Oeste……….. 107
Figura 4.5 Trayectoria solar ………. 124
Figura 4.6 Cálculo del foco producido por el haz luminoso que llega a la superficie del concentrador cilindro-parabólico……… 128
ÍNDICE DE TABLAS
Pág.
Tabla 1 Coordenadas de la parábola con vértice en el origen………... 17
Tabla 2 Características generales de un perfil parabólico………... 21
Tabla 3 Momentos de inercia de los 6 perfiles parabólicos de la lámina……… 22
Tabla 4 Características de cada marco del concentrador solar……… 24
Tabla 5 Momentos de inercia de cada marco……….. 25
Tabla 6 Características de las soleras del concentrador solar………. 27
Tabla 7 Momentos de inercia de las soleras del concentrador solar………... 28
Tabla 8 Características de la lámina de acero inoxidable #304 acabado espejo………. 30
Tabla 9 Momentos de inercia de la lámina de acero inoxidable #304 acabado espejo……….. 31
Tabla 10 Características de la base de los tensores del concentrador………. 32
Tabla 11 Momentos de inercia de la base de los tensores del concentrador………... 33
Tabla 12 Características generales de la base del porrón………... 35
Tabla 13 Características y momentos de inercia de las partes de la base del porrón…………. 36
Tabla 14 Características y momentos de inercia de un porrón……… 40
Tabla 15 Características y momentos de inercia de un eje……….. 42
Tabla 16 Momentos de inercia con respecto al eje de giro………. 46
Tabla 17 Características del sensor solar……… 68
Tabla 18 Especificaciones del controlador de seguimiento……… 69
Tabla 19 Características de los elementos del controlador de seguimiento……… 70
Tabla 20 Direccionamiento de entradas y salidas……….. 77
Tabla 21 Rango de escalas de la configuración del EM231……… 80
Tabla 22 Ajustar el bloque de parámetros del TD 200……… 88
Tabla 23 Calentamiento del agua de la alberca del 8 de Octubre del 2010……… 95
Tabla 24 Datos para obtener el rendimiento del concentrador solar……….. 97
Tabla 25 Inclinación, velocidad y aceleración del concentrador solar del 8 de Octubre del 2010……….. 103
Tabla 26 Calentamiento del agua de la alberca del 14 de Octubre del 2010……… 108
Tabla 27 Inclinación, velocidad y aceleración del concentrador solar del 14 de Octubre del 2010……….. 113
Tabla 28 Calentamiento del agua de uso doméstico del 15 de Octubre del 2010………. 117
ÍNDICE DE GRÁFICAS
Pág.
Gráfica 1 Lecturas de las temperaturas del calentamiento del agua de la alberca del 8 de Octubre de 2010 de 10 hrs. a 15:30 hrs……….. 99
Gráfica 2 Lecturas de las temperaturas del foco del 8 de Octubre de 2010 de 10 hrs. a 15:30 hrs.. 100
Gráfica 3 Lecturas de la radiación solar del 8 de Octubre de 2010 de 10 hrs. a 15:30 hrs………… 101
Gráfica 4 Rapidez de cambio de la temperatura de salida con respecto a la entrada del día 8 de Octubre de 2010 de 10 hrs. a 15:30 hrs………. 102
Gráfica 5 Lecturas de inclinación de los concentradores solares del día 8 de Octubre de 2010 de 10
hrs. a 15:30 hrs……….. 104
Gráfica 6 Lecturas de la velocidad de los concentradores solares del día 8 de Octubre de 2010 de
10 hrs. a 15:30 hrs………. 105
Gráfica 7 Lecturas de la aceleración de los concentradores solares del día 8 de Octubre de 2010 de
10 hrs. a 15:30 hrs………. 106
Gráfica 8 Lectura de las temperaturas del calentamiento del agua de la alberca del 14 de Octubre de 2010 de 10 hrs. a 15:30 hrs……… 109
Gráfica 9 Lectura de las temperaturas del foco del 14 de Octubre de 2010 de 10 hrs. a 15:30 hrs.. 110
Gráfica 10 Lecturas de la radiación solar del 14 de Octubre de 2010 de 10 hrs. a 15:30 hrs……… 111
Gráfica 11 Lecturas de la rapidez de cambio de la temperatura de salida con respecto a la entrada del día 14 de Octubre de 2010 de 10 hrs. a 15:30 hrs………... 112
Gráfica 12 Lecturas de la inclinación de los concentradores solares del día 14 de Octubre de 2010
de 10 hrs. a 15:30 hrs……… 114
Gráfica 13 Lecturas de la velocidad de los concentradores solares del día 14 de Octubre de 2010 de
10 hrs. a 15:30 hrs………. 115
Gráfica 14 Lecturas de la aceleración de los concentradores solares del día 14 de Octubre de 2010 de 10 hrs. a 15:30 hrs……… 116
Gráfica 15 Lecturas de las temperaturas del calentamiento del agua de uso doméstico del 15 de Octubre de 2010 de 10 hrs. a 13:15 hrs……… 119
Gráfica 16 Lecturas de las temperaturas del foco del 15 de Octubre de 2010 de 10 hrs. a 13:15 hrs 120
Gráfica 17 Lecturas de la radiación solar del 15 de Octubre de 2010 de 10 hrs. a 13:15 hrs……… 121
Gráfica 18 Lectura de rapidez de cambio de la temperatura de salida con respecto a la entrada del día 15 de Octubre de 2010 de 10 hrs. a 13:15 hrs……… 122
Gráfica 19 Lecturas de la inclinación de los concentradores solares del día 15 de Octubre de 2010
de 10 hrs. a 13:15 hrs………. 125
Gráfica 20 Lecturas de la velocidad de los concentradores solares del día 15 de Octubre de 2010 de
10 hrs. a 15:15 hrs……… 126
Gráfica 21 Lecturas de la aceleración de los concentradores solares del día 15 de Octubre de 2010
SIMBOLOGÍA
Área, Ampere
La mitad de lo ancho de la parábola
A/D Analógico/Digital
AWL Lenguaje por lista de instrucciones
Distancia del foco al vértice
b Fricción
C Contadores
C1 Concentrador solar 1
C2 Concentrador solar 2
C3 Concentrador solar 3
CPC Concentrador parabólico compuesto
CPU Unidad Central de Proceso
CRS Concentrador de receptor solar
Distancia perpendicular entre los ejes paralelos Largo de perfil parabólico
DC Corriente Directa
D.I.M. Monitor directo de la insolación
DP Discos parabólicos o paraboloides de revolución
Error
EM231 Módulo de expansión de entradas analógicas
E/S Entradas/Salidas
E-W Este-Oeste
Foco
1
F Fuerza del porrón 1, N
2
F Fuerza del porrón 2, N
FUP Plano de funciones lógicas
G Centro de masas
°C Grados Centígrados
Gravedad
GRAFCET Gráfico de Orden Etapa-Transición
Coordenada del vértice en el eje x Altura inicial del agua de los porrones Altura final del agua del porrón 1
Hz Herz
I Entrada digital del PLC
Momento de Inercia
Radiación incidente sobre el captador,
Momento de inercia con respecto al eje de giro Coordenada del vértice en el eje y
kg Kilogramos
Constante proporcional Constante derivativa Constante integrativa
l Litros
l Longitud,
LDR Resistor dependiente de la luz
Masas
M Área de marcas
Metros
m Mili
N Newton
O Origen
p Coordenada del Foco en el eje x
PC Computadora
PC/PPI Cable de conexión del PLC a la PC
PLC Controlador Lógico Programable
Q Salida digital del PLC
Flujo del agua, Calor útil
r brazo de palanca,
RUN Ejecutar el programa del PLC
Sensores
SM Marcas especiales
STOP Parar el programa del PLC
S7-200 Línea de fabricación del PLC
SW Switch
T Temporizadores
Tiempo
Temperatura de salida Temperatura de entrada
TD 200 Visualizador de textos del PLC
TERM Terminar el programa del PLC
V Vértice
V Volt
Voltaje de salida del amplificador Voltaje inicial para el amplificador Voltaje final para el amplificador Volumen,
VCA Voltaje de corriente alterna
VDC Voltaje de corriente directa
Coordenada en x
x,y,z Centroide del sistema
'
x , y', z' Ejes paralelos Coordenada en z
mn Eje menor de la elipse del foco ACDBGE Superficie de la elipse
Suma de momento con respecto al eje de giro Densidad,
Angulo de giro del sistema Velocidad angular del sistema Aceleración angular del sistema Ángulo deseado
Microameperes
Rendimiento de los concentradores solares Torque
Subíndices Coordenada en x
Coordenada en y Coordenada en z Centroide en el eje x Centroide en el eje y Centroide en el eje z
per Perfil parabólico
mar Marco
sol Solera del concentrador
bas Base del porrón
sole Solera de la base del porrón
por Porrón
O
BJETIVOG
ENERALDiseñar y construir un sistema de control para la orientación de un concentrador solar cilíndrico-parabólico Este-Oeste.
O
BJETIVOSP
ARTICULARES1. Obtener los parámetros físicos y mecánicos del concentrador solar. 2. Obtener el modelo dinámico del concentrador solar.
3. Implementar esquemas de control al concentrador solar.
4. Integración total del sistema de control a los concentradores, depuración de errores y puesta en marcha.
J
USTIFICACIÓNEl aumento del precio de los hidrocarburos (petróleo, gas, etc.) en los últimos años han llevado a varios países a reflexionar sobre la necesidad de crear alternativas de suministro energético distintas al petróleo. Por lo mismo, se han concentrado los esfuerzos en las energías alternativas también conocidas como energías renovables para evitar el calentamiento global. Esta energía se obtiene de fuentes naturales virtualmente inagotables, unas por la inmensa cantidad de energía que contienen, y otras porque son capaces de regenerarse por medios naturales.
En la actualidad se siguen buscando soluciones para resolver esta crisis inminente. La energía solar es un notable ejemplo de energías renovables, ésta se puede aprovechar de forma directa para la obtención de agua caliente o bien puede convertirse en energía eléctrica. En cualquier caso, la primera condición que debe reunir un sistema de aprovechamiento de energía solar es la de recoger la mayor cantidad posible de energía recibida en un determinado lugar. Esta condición exige que la superficie colectora sea, en todo momento, perpendicular a los rayos solares y, por tanto, una colección óptima sólo puede conseguirse si dicha superficie está dotada de un movimiento de seguimiento del Sol.
D
EFINICIÓN DEP
ROBLEMALa energía que envía el Sol a la tierra llega en diferentes ángulos, esto depende de la situación geográfica, hora del día y época del año, por esta razón la orientación de los concentradores solares es uno de los parámetros más importantes para el mayor aprovechamiento de la energía solar en los sistemas de calentamiento de agua, de manera que la superficie captadora se debe de encontrar en todo momento perpendicular a los rayos del Sol desde el Este en la alborada hasta el Oeste en la puesta.
CAPÍTULO I
C
APÍTULOI
E
STADO DELA
RTEEl mundo se enfrenta a un gran reto: cambiar de modelo energético, esto es, pasando del consumo basado en los combustibles fósiles a las energías renovables. Los combustibles fósiles son limitados y algún día se agotarán. El Sol, sin embargo, continuará brillando durante millones de años, ante esta idea, los ingenieros y científicos han desarrollado prototipos que permiten el aprovechamiento de la radiación solar, entre los que se encuentra el concentrador solar. Este tipo de sistemas de colectores solares necesitan tener un sistema de seguidor solar, que permita los rayos solares estén concentrados en un punto, en una línea o en una superficie en todo momento.
La necesidad de captar la mayor cantidad posible de la energía incidente en un determinado punto es una exigencia común en todos los sistemas de aprovechamiento de energía solar. La máxima captación se tiene si la superficie colectora se mantiene constantemente en la posición normal a los rayos del Sol, lo que puede conseguirse si dicha superficie está dotada de un movimiento de seguimiento del Sol, aunado a una construcción del calentador prácticamente perfecta.
1.1
C
ONCENTRADORESS
OLARESUn concentrador solar es un tipo de colector solar, capaz de concentrar la energía solar en un área reducida aumentando la intensidad energética (radiación solar concentrada). Entendiendo por radiación solar la energía radiante recibida del Sol en forma directa y difusa.
Los concentradores se pueden clasificar según las siguientes características:
Temperatura de operación
Tipo de seguimiento
Forma geométrica
Los concentradores menos complejos son los que no requieren seguimiento continuo del Sol; éstos están orientados Este-Oeste (E-W) a fin de obtener mejor aprovechamiento de los rayos del Sol, tienen un ángulo de aceptancia muy grande y concentración baja. El ángulo de aceptancia es la amplitud de la zona angular dentro de la cual la radiación es captada por el absorbedor de un concentrador. En caso de que el sistema de control falle, el concentrador sigue funcionando
Desde el punto de vista tecnológico, y atendiendo a las características de la parte solar, existen diversos concentradores, figura 1.1, entre los principales se tienen:
Discos parabólicos o paraboloides de revolución (DP)
Figura 1.1 Concentradores solares a) CCP, b) CRS, c) DP [1w]
1.1.1 Ventajas del empleo de concentradores solares
1. La cantidad de energía colectada sobre la superficie de absorción por unidad de área se aumenta, con lo cual se pueden alcanzar altas temperaturas aprovechables en algún ciclo termodinámico o en dispositivos termoiónicos, termoeléctricos u otros.
2. Reduciendo las pérdidas de calor al utilizar un absorbedor de menor área no sólo se mejoran las eficiencias térmicas sino que también se reducen efectos transitorios, ya que la masa térmica es mucho más pequeña que en colectores planos.
3. Los costos se reducen pues se reemplaza un absorbedor costoso por un área reflectora menos costosa y más duradera.
4. Se pueden obtener altas temperaturas incluso en invierno [1].
1.1.2 Desventajas del empleo de concentradores solares
1. Trabajan sólo con la componente directa de la radiación solar, quedando restringida su utilización a lugares de alta insolación
2. La calidad óptica de la superficie reflectora requiere mantenimiento y protección intensiva contra su exposición a la intemperie.
3. Cuanto más alta es la temperatura a la cual la energía va a ser entregada en un concentrador, mayor deberá ser la razón de concentración; para lograr esto, la geometría del concentrador necesita ser la más precisa posible, así como del sistema que permite seguir al Sol, lo que se ve reflejado en el costo del sistema termosolar [1].
absorbente Tubo
parabólico Espejo
Tuberias
Receptor
Heliostato
Receptor
1.2
A
NTECEDENTESH
ISTÓRICOSLa función más específica de un sistema de seguimiento es que el colector siga al Sol en su movimiento, manteniéndose apuntado hacia él en todo momento. Es por eso que se han creado varios sistemas de orientación para colectores solares como se muestra a continuación.
En [2] se presenta un sistema de seguimiento construido para controlar el panel solar fotovoltaico con lentes de Fresnel para concentrar la radiación solar directa sobre células solares de silicio, el cual posee una superficie de . El panel a control utiliza una configuración de seguimiento en dos ejes en un montaje azimut- elevación, quedando, por tanto, determinada su orientación por los ángulos azimutal y de elevación. El seguimiento del Sol en cada uno de estos ejes se consigue mediante un bucle de control, utilizando sistemas fotosensores situados en una pieza soldada al panel, para las condiciones de fuerte viento o granizo se genera una orden de posicionamiento de seguridad que controla el movimiento de los motores para colocar el panel en la posición adecuada; los autores vieron la posibilidad de producir un desenfoque momentáneo del panel para el caso en que se produzca una elevación indeseable de temperatura que pueda afectar al panel. En este artículo se presenta un esquema de los circuitos y el diagrama de bloque de un sistema de seguimiento.
El objetivo de [3] se relaciona con los montajes del colector solar y más
particularmente del seguidor solar, este último tiene un campo visual limitado que monitorea la presencia o ausencia de la luz directa del sol para reducir al mínimo los errores de orientación que se puedan ocasionar cuando existan nubes.
Otra aportación importante en esta invención es que se proporciona un D.I.M. (un monitor directo de la insolación), que indica la presencia o la ausencia de la insolación directa sin importar la posición del Sol mientras que éste se mueve a través del cielo y con ello poder tener un sistema de orientación predeterminado que no está basado en la posición del Sol. Como es descrito detalladamente, en el montaje del colector de energía solar se utilizan paneles para recolectar la energía solar, el panel tiene la trayectoria que sigue al Sol desde que amanece hasta la puesta del Sol. Este proyecto incluye un motor eléctrico u otros medios convenientes para mover al panel solar hacia adelante y hacia atrás a lo largo de la trayectoria del Sol.
énfasis en el diseño de un sistema de arrastre y control que mueva al concentrador o colector solar y lo mantenga continuamente apuntando al Sol. El autor de este artículo concluye con una comparación de las ventajas y desventajas que tiene un seguidor solar de coordenadas calculadas y uno guiado por fotosensores.
En [5] se presenta un estudio teórico que se realizó en diferentes sistemas de
seguimiento solar. Este estudio se basó en el cálculo de la energía de radiación solar captada por los diferentes sistemas, utilizando la radiación global y difusa de una superficie horizontal que mide la radiación de haz. Los diseños de estos sistemas son un sistema fijo colocado en el Sur e inclinado grados de la vertical del eje donde se encuentra el seguidor, el otro se inclinó 6 grados con respecto del eje del seguidor. Los resultados teóricos fueron comparados con la energía solar práctica medidos desde los sistemas instalados en un campo de prueba. La precisión anual de los valores obtenidos del presente estudio son 5,36%, 9,07%, 7,92% y 5,98%, respectivamente. El análisis también demostró que este valor de precisión cambiado de mes a mes se acerca a las mediciones anuales que se realizaron.
El seguidor solar electrónico de [2w] se basa fundamentalmente en la utilización de un amplificador operacional 741 operando en modo diferencial, figura 1.2. El integrado recibe sendas señales de dos fotoresistores LDR (Resistor dependiente de la luz) que forman un divisor de tensión, estos al estar sometidos a la acción de los rayos solares, y estando separados por un tabique opaco, reciben en cierto momento distinta radiación, entregando de esta manera distintas señales ( y ) a cada entrada del amplificador. Dicho amplificador entonces al estar conectado en modo diferencial entrega una tensión de salida proporcional a la diferencia
La figura 1.2a muestra un esquema de la ubicación de los sensores del seguidor en la estructura del concentrador, y el movimiento de corrección que se logra en el sistema.
Figura 1.2 Esquema general del colector solar [6].
Figura 1.2 a) Ubicación del seguidor solar en la estructura del concentrador, b) Vista lateral del sensor del seguidor y principio de funcionamiento [6].
El seguimiento solar se utiliza en grandes plantas de energía fotovoltaicas de conexión a la red para maximizar la colección de la radiación solar y, por lo tanto, tienden a reducir el costo de entrega de electricidad. En particular, el seguimiento único con eje vertical, también llamado acimut seguimiento, permite ganar hasta un 40% de energía como se muestra en el artículo [6], en comparación con los arreglos de discos completamente
estáticos óptimamente inclinados. Los autores de este artículo examinan los aspectos teóricos relacionados con el diseño de seguimiento azimut, teniendo en cuenta el sombreado entre diferentes seguidores y las características de seguimiento.
En el artículo [7] los autores se concentran en la comparación de los colectores CPC
(concentrador parabólico compuesto) que no tienen seguidor solar con los colectores que tienen seguidor. Los primeros se montan en dirección Este-Oeste con un ángulo que depende de la latitud del lugar, las temperaturas máximas que se pueden alcanzar son hasta 200-250 °C. Mientras que el segundo tiene un mecanismo magnético que guía la posición
Batería Foco Solar Radiación Espejos Sensor seguidor Circuito Piñón Cadena Motor Eléctrica
Conexión Rodamiento Tripode
dentada Corona Eje Bastidor LDR sistema del Posición separador Tabique LDR fija angular Posisción
Foco Radiación delsistema
del concentrador solar parabólico, la temperatura que se genera es de 350°C, siendo ésta última más eficiente que la primera.
En [8] se propone un sistema seguidor solar a bajo costo el cual es activado por tiras bimetálicas de aluminio y acero, y a su vez controlado por un amortiguador viscoso, figura 1.3. Las tiras bimetálicas se colocaron en un marco de madera, de forma simétrica a ambos lados de un eje horizontal central y posicionadas de tal manera que la tira más lejos del Sol absorbe la radiación solar, mientras que la otra tira tiene sombra. En las pruebas experimentales se demostró que la tira de aluminio que está expuesta al sol se dobla más que la del acero debido a su coeficiente de expansión térmica. Esta deflexión produce una flexión máxima en el punto medio, lo que genera un momento y a su vez un movimiento que orienta el colector hacia el Sol. Cuando la temperatura es muy fría, se produce otra deflexión que provoca que el colector solar regrese a su posición inicial (mecanismo de retorno durante la noche). Con esta propuesta se obtiene un aumento de eficiencia del 23% con respecto a los seguidores solares comerciales.
Figura 1.3 Montaje experimental para la prueba con tira bimetálica [8].
Se presenta en [9] el diseño y construcción de un circuito electrónico para seguidores de sol, el cual puede ser usado para orientar de manera automática, paneles hacia la región de mayor incidencia de radiación, incrementando la eficiencia de éstos, en el proceso de conversión de energía solar- energía eléctrica. Una de las ventajas del circuito es que puede usarse en otros sistemas que requieran la propiedad de heliotropismo tales como colectores solares y medidores de radiación directa, figura 1.4.
El circuito diseñado, permite un seguimiento continuo y automático del sol alrededor de un eje. Éste, evalúa el nivel de radiación procedente de dos sensores ( y )y actúa sobre un motor DC, haciendo girar al sistema (en torno al eje H) hasta que las radiaciones detectadas por los sensores sean iguales, con esto se consigue mantener una plataforma siempre orientada hacia el Sol. Una barra es colocada entre ambos sensores para eliminar la radiación directa que incide sobre el sensor que está más alejado del Sol. El circuito posee además, dos sensores de carrera ( y ), los cuales le indican el inicio y la culminación del día.
termica Radiación
a) b)
Figura 1.4 a) Sistema de seguimiento solar para el cual se diseñó el circuito de control, b) Sistema experimental usado para la calibración del circuito electrónico [9].
Los autores de [3w] utilizan algoritmos genéticos como una técnica para optimizar
los seguidores solares en cuanto a su posición (localización gráfica y el tiempo), dicha técnica está basada en la teoría de Woolf que recibe la radiación solar máxima, de esta manera el sistema reduce errores computacionales de posición, errores mecánicos, de sistemas de control e instalación. Los algoritmos están basados en un sistema de soluciones estadísticas, con una condición inicial establecida, creando una salida de voltaje que el sensor recibe y ejecuta para su posicionamiento. Con este experimento se demuestra que el funcionamiento del sistema aumenta cerca del 7.084% de eficiencia.
En el artículo [10] se presenta un método de síntesis estructural de mecanismos planos usados en la orientación de sistemas de energía solar. El método puede aplicarse a mecanismos espaciales, levas o mecanismos de engranes. Mediante el uso de la teoría de cuerpos múltiples se obtuvieron gráficas que más tarde se analizaron y se transformaron en mecanismos que simulaban dicho movimiento. En este trabajo se muestran los movimientos que tiene el seguidor solar, las configuraciones, la estructura y los mecanismos utilizados para obtener una mejor precisión. Se concluye de acuerdo a los criterios que se obtuvieron los análisis cinemáticos y dinámicos de los sistemas mecánicos de orientación solar, las soluciones también presentan las ventajas relativas a la cuestion de control, la creación de prototipos y la aplicación, figura 1.5.
Paneles
Opaca Barrera
1
s
2
s
Soporte
Base
H Eje
I Eje
circuitos de Caja
radiación de Sensores
Motor
3
s
4
Figura 1.5 Mecanismos planos usados en la orientación de paneles solares [10].
En el artículo [11] se presenta el control de un seguidor solar con alta exactitud sin necesidad de un procedimiento exacto de instalación o de recalibración. Este sistema seguidor híbrido está basado en los movimientos solares (cadena abierta) y un regulador dinámico de regeneración para el movimiento (lazo cerrado). Los ahorros de energía en los motores que mueven al colector solar son considerables, puesto que, no se sigue al sol con la misma exactitud con la que se mueve, para prevenir el consumo excesivo de energía en los motores. Se exponen la simulación y los resultados experimentales obtenidos con gran detalle.
En el artículo [4w] la empresa española de Avilesina Asterfeito muestra en la figura
1.6 el desarrollo de un sistema de seguimiento solar milimétrico que permite un mayor aprovechamiento de la luz del Sol en las plantas de energía solar térmica. Con este sistema se facilita el movimiento de los paneles solares de tal forman que puedan hacer un seguimiento de la luz solar lo más preciso posible.
La tecnología de este sistema es una innovación en el campo de los sistemas hidráulicos usados para accionar los dispositivos mecánicos de la plantas de energía solar térmica.
Según la empresa, con la utilización de esta tecnología, se puede lograr un mayor rendimiento de los paneles solares y una rebaja del consumo eléctrico del 75 %, lo que implica una reducción de los gastos del autoconsumo de la planta.
Aunque el uso de seguidores solares no es esencial, su uso puede aumentar la energía recogida de 10% a 100% en diferentes periodos de tiempo y las condiciones geográficas. Sin embargo se ha encontrado que existen diferentes tipos de sistemas de seguimiento solar, en [12] se discuten las ventajas y desventajas de estos sistemas, los
Figura 1.6 Sistema de seguimiento milimétrico de la trayectoria solar [4w].
En [13] se ha propuesto un motor esférico, que tienen la habilidad de moverse lineal y circularmente en tres dimensiones, fueron usados para seguir al sol con gran exactitud. En este estudio, un motor esférico es controlado por un microcontrolador que se mueve en dos ejes. El funcionamiento de este seguidor solar sólo es aplicable en Turquía y Denizli, ya que fue cuidadosamente estudiado el clima de estas zonas.
La empresa TRAXLE ofrece al público seguidores solares construidos de aluminio o acero inoxidable. Los paneles solares que se les adapta a este seguidor solar están colocados Norte-Sur, con la finalidad de hacer frente al sol directamente todo el día. Se incorpora al panel solar un motor de corriente directa que es accionado por un módulo fotovoltaico pequeño unido a la parte inferior del panel solar. Este módulo se monta perpendicular hacia el sol y contiene las módulos fotovoltaicos para detectar los rayos solares. Las ventajas del seguidor solar que TRAXLE brinda, es obtener un 30% más de eficiencia de la captación solar y los perfiles de instalación son de fácil funcionamiento y no requieren de mucho mantenimiento [5w].
1.3
T
IPOS DES
EGUIDORESS
OLARESUn seguidor solar es un dispositivo mecánico capaz de orientar los módulos
fotovoltaicos o colectores solares de forma que éstos permanezcan perpendiculares a los
rayos solares. Siendo éste el primer requisito que se exige para el aprovechamiento de la energía solar. Se clasifican de la siguiente manera:
Existen diferentes tipos de seguidores solares según su rango de movimientos
1.3.1 Seguidores de un eje
1.3.2 Seguidores de dos ejes
Se trata de seguidores con dos grados de libertad, capaces de hacer un seguimiento solar más preciso, la superficie se mantiene siempre perpendicular al sol. Las ventajas que ofrece son: un seguimiento solar más preciso e incrementos en la eficiencia del 35%, sin embargo, tienen un elevado coste.
CAPÍTULO II
C
APÍTULOII
MODELO DINÁMICO DE UN CONCENTRADOR SOLAR CILINDRO-
PARABÓLICO ESTE-
OESTEEl concentrador solar cilíndrico-parabólico cuenta con un arreglo de espejos en forma de cilindro con generatriz parabólica. En el foco se coloca un tubo de cobre por donde pasa el agua y dependiendo de la longitud de exposición, el área de captación solar y la radiación la temperatura del agua aumenta.
Figura 2.1 Fotografía del concentrador solar cilindro-parabólico
2.1
P
ARÁMETROSGEOMÉTRICOSEl concentrador cilindro parabólico, denominado mediante las siglas CCP, debe su nombre a uno de sus componentes principales: la superficie reflectante cilindro parabólica refleja la radiación solar directa concentrándola sobre un tubo absorbente colocado en la línea focal de la parábola. Esta radiación concentrada sobre el tubo absorbente hace que el fluido que circula por su interior se caliente, transformando de esta forma la radiación solar en energía térmica, en forma de calor sensible o latente del fluido. En la figura 2.2 el agua fría sale de los tanques de plástico Rotoplas donde se encuentra almacenada, de aquí se dirige hacia los tanques de agua caliente; de los tanque de agua caliente el agua se envia a los concentradores solares por medio de una bomba de agua. El agua fluye por los concentradores a través de los tubos de cobre, donde éstos reciben la radiación solar como se muestra, el agua circula por los tres concentradores solares hasta obtener una temperatura de 60°C y se almacena en los tanques de agua caliente, para posteriormente ser usada.
Figura 2.2 Componentes del concentrador CCP
La conversión de energía solar en calor mediante concentradores solares es una tecnología bien conocida. La complejidad de los dispositivos de conversión depende de la temperatura que se desea alcanzar. Para que esto sea posible, cada elemento se debe de diseñar y ensamblar de forma correcta, evitando que exista alguna imperfección.
2 or Concentrad Soporte agua de Bomba fría agua de Tanques caliente agua de Tanques doméstico Uso caliente agua de tanques los a fría agua de Flujo paso de Llaves solar Radiación cobre de Tubos or d concentra al fría agua de n Circulació 3 or
Concentrad Concentrador 1
Para el diseño del concentrador se consideró que la abertura máxima de la parábola fuese de , esto se debe a que se instalaron tres concentradores solares en una
superficie de como se muestra en la figura 2.3.
Figura 2.3 Concentradores solares instalados en una superficie de
En la geometría del concentrador un parámetro importante es la parábola, ya que ésta refleja sobre el foco los rayos que recibe del sol. Una parábola es el lugar geométrico de un punto que se mueve en un plano de tal manera que su distancia de una recta fija, situada en el plano, es siempre igual a su distancia de un punto fijo del plano y que no pertenece a la recta [14]. En este caso la ecuación de la parábola se obtuvo a partir de:
xh
2 4p
yk
.El vértice V(h, k) se encentra en V (0,0.875), la ecuación [13] se puede escribir
como:
0.875
42
y p
Ahora bien, el Foco F(p,0) es F(0.875,0); por lo que la ecuación de la parábola que se obtiene es:
. 875 . 0 50 . 3
2
x
y
Al ejecutar el programa „ecuación parabóla.m‟ (véase apéndice A, pág. 135) en el Workspace de Matlab® 2010 demo los resultados obtenidos son:
La distancia del vértice al foco es de El ancho de la parábola es de
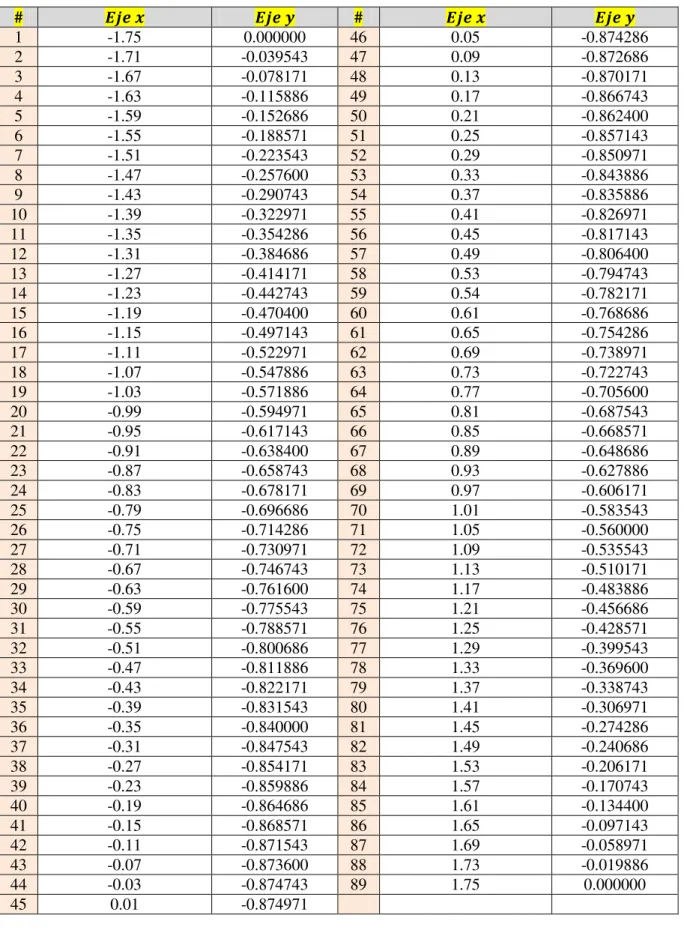
Basados en la ecuación y mediante el empleo del programa “ecuación
parabóla.m”, (véase apéndice A, pág. 135) desarrollado en Matlab® 2010 versión demo, se obtienen las siguientes coordenadas de la parábola necesarias para construir el perfil del concentrador solar, ver la figura 2.4 y la tabla 1.
Figura 2.4 Parábola del concentrador solar
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0
EJE X
E
J
E
Y
Tabla 1 Coordenadas de la parábola con vértice en el origen
# #
1 -1.75 0.000000 46 0.05 -0.874286
2 -1.71 -0.039543 47 0.09 -0.872686
3 -1.67 -0.078171 48 0.13 -0.870171
4 -1.63 -0.115886 49 0.17 -0.866743
5 -1.59 -0.152686 50 0.21 -0.862400
6 -1.55 -0.188571 51 0.25 -0.857143
7 -1.51 -0.223543 52 0.29 -0.850971
8 -1.47 -0.257600 53 0.33 -0.843886
9 -1.43 -0.290743 54 0.37 -0.835886
10 -1.39 -0.322971 55 0.41 -0.826971
11 -1.35 -0.354286 56 0.45 -0.817143
12 -1.31 -0.384686 57 0.49 -0.806400
13 -1.27 -0.414171 58 0.53 -0.794743
14 -1.23 -0.442743 59 0.54 -0.782171
15 -1.19 -0.470400 60 0.61 -0.768686
16 -1.15 -0.497143 61 0.65 -0.754286
17 -1.11 -0.522971 62 0.69 -0.738971
18 -1.07 -0.547886 63 0.73 -0.722743
19 -1.03 -0.571886 64 0.77 -0.705600
20 -0.99 -0.594971 65 0.81 -0.687543
21 -0.95 -0.617143 66 0.85 -0.668571
22 -0.91 -0.638400 67 0.89 -0.648686
23 -0.87 -0.658743 68 0.93 -0.627886
24 -0.83 -0.678171 69 0.97 -0.606171
25 -0.79 -0.696686 70 1.01 -0.583543
26 -0.75 -0.714286 71 1.05 -0.560000
27 -0.71 -0.730971 72 1.09 -0.535543
28 -0.67 -0.746743 73 1.13 -0.510171
29 -0.63 -0.761600 74 1.17 -0.483886
30 -0.59 -0.775543 75 1.21 -0.456686
31 -0.55 -0.788571 76 1.25 -0.428571
32 -0.51 -0.800686 77 1.29 -0.399543
33 -0.47 -0.811886 78 1.33 -0.369600
34 -0.43 -0.822171 79 1.37 -0.338743
35 -0.39 -0.831543 80 1.41 -0.306971
36 -0.35 -0.840000 81 1.45 -0.274286
37 -0.31 -0.847543 82 1.49 -0.240686
38 -0.27 -0.854171 83 1.53 -0.206171
39 -0.23 -0.859886 84 1.57 -0.170743
40 -0.19 -0.864686 85 1.61 -0.134400
41 -0.15 -0.868571 86 1.65 -0.097143
42 -0.11 -0.871543 87 1.69 -0.058971
43 -0.07 -0.873600 88 1.73 -0.019886
44 -0.03 -0.874743 89 1.75 0.000000
2.2
C
OMPONENTES DEL CONCENTRADOR SOLAR CILINDRO-PARABÓLICOEn los componentes que se controlarán se ha realizado una comparación de los momentos de inercia con respecto al centro de masas utilizando el paquete MSC.Visual Nastran® 4D 2004 demo con las ecuaciones obtenidas matemáticamente. El método matemático ha sido programado en el paquete de Matlab® 2010 versión demo. Posteriormente se obtiene el momento de inercia con respecto al eje de giro usando el teorema de Steiner o mejor conocido como teorema de ejes paralelos, siendo este el foco de la parábola como se señala en la figura 2.5.
Figura 2.5 Eje de giro del concentrador
El momento de inercia se define como una medida de la resistencia que ofrece el
sistema cuando se trata de ponerlo en movimiento, siendo este [15].
En [15] considera un cuerpo de masa , donde Oxyz es un sistema de coordenadas
rectangulares cuyo origen está localizado en el punto arbitrario
O
y que Gx'y'z' es un sistema de ejes centroidales paralelo, esto es, un sistema cuyo origen está en el centro de masasG
del cuerpo y cuyos ejesx
'
, y' y z' son paralelos a los ejesx
, y y z respectivamente (figura 2.6). Representado por x,y y z las coordenadas de G conrespecto de Oxyz, se describen las siguientes relaciones entre las coordenadas
x
, y y zdel elemento
dm
con respecto a Oxyz y las coordenadasx
'
, y' y z' de dicho elementocon respecto de los ejes centroidales Gx'y'z'.
Figura 2.6 Ejes paralelos
I I
y2 z2
M I d2M,x x x
x
I I
z2 x2
M I d2M,y y y
y
Iz Iz
x2y2
M Iz dz2M.Las ecuaciones , y constituyen el teorema de Steiner para
momentos de inercia. El cual establece que el momento de inercia de masa Ix, Iy ó Iz
respecto a un eje dado es igual a la suma del momento de masa respecto a un eje paralelo que pasa por el centro de gravedad del cuerpo Ix, Iy ó Iz y el producto de la masa
Mpor la distancia perpendicular entre los ejes bajo consideración
2d .
2.2.1
Perfiles parabólicosLos perfiles parabólicos sirven de apoyo para la lámina tipo espejo, dándole rigidez al concentrador, se encuentran soldados a los marcos y fueron rolados a mano para obtener una mayor precisión en la parábola, el rolado a mano siguió una matriz parabólica usando los valores de la tabla 1. Cada concentrador necesita seis perfiles parabólicos, los cuales son
de PTR calibre #14 Azul de pulgadas, que son equivalentes a 0.033 en el Sistema
Internacional, las medidas de un perfil de la parábola están detalladas en el Apéndice B, pág. 160. En la figura 2.7, se muestra la configuración de los seis perfiles en vista
x
y
z
'
x
'
y
'
z
z y
x B
G
dm
isométrica realizado en el paquete Mechanical Desktop 6 Power Pack ® demo y abajo la fotografía de la estructura del concentrador
Figura 2.7 A) Configuración de los seis perfiles en vista isométrica realizado en el paquete Mechanical Desktop 6 Power Pack ® demo, B) Fotografía de los perfiles parabólicos del concentrador solar en
construcción .
En la figura 2.8 se muestra un perfil parabólico con vista frontal e inferior en donde se señala el eje de giro y la localización de su centro de masas.
1 Perfil
2 Perfil
3 Perfil
4 Perfil
5 Perfil
6 Perfil z)
(eje Giro de Eje
A)
B)
1
Perfil Perfil 2
3 Perfil
4 Perfil
Figura 2.8 a) Vista frontal, b) Vista Inferior, c) Medidas de un perfil parabólico
Tabla 2 Características generales de un perfil parabólico Material
PTR calibre #14 Azul
Ecuación de la parábola
875 . 0 50 . 3
2
x
y
Masa del perfil de la parábola
Densidad de cada perfil parabólico
Área de la parábola Volumen de la parábola
Ecuación del momento de inercia de un
cilindro-parabólico sólido con respeto al centro de masas** Momento de inercia con respecto al eje de giro (Eje z)**
** Véase el desarrollo en el Apéndice A, pág. 135, “perfil parabólico.m”
ver en la figura 2.9
Inferior b)Vista
Frontal Vista
a)
masas de Centro
(z) giro de Eje
(z) giro de Eje
Medidas c)
3.5m
Figura 2.9 Cilindro parabólico sólido
De acuerdo a las características mencionadas anteriormente (tabla 1), el momento de inercia con respecto al centro de masas es el mismo para los seis perfiles parabólicos, puesto que todos tienen las mismas medidas y la misma altura del eje de giro (eje z). Al comparar el método matemático realizado por el autor de esta tesis (Matlab® 2010 versión demo) con el del programa de MSC.VisualNastran®4D2004 demo se obtienen:
Tabla 3 Momentos de Inercia de los 6 perfiles parabólicos de la lámina Momento de inercia con respecto al centro de masas
(Matlab® 2010 versión demo)
Momento de inercia con respecto al centro de masas (MSC.VisualNastran® 4D 2004 demo)
Momento de inercia con respecto al eje de giro (Eje z)
d
a
2.2.2
Marcos del concentradorEl concentrador está compuesto por cuatro marcos de PTR calibre #14 Azul de
, que son equivalentes a en el Sistema Internacional. Dos de
ellos tienen una longitud de 6.20m, mientras que los otros dos tienen una longitud de 3.50 m, como se muestra en la figura 2.10 y 2.11 (detalles en el Apéndice B, pág.161). Los marcos dan la rigidez al concentrador solar y van soldados los perfiles parabólicos.
Figura 2.10 Marcos del concentrador solar
Figura 2.11 Fotografía de los marcos del concentrador solar 1
Marco
4 Marco
3 Marco
2 Marco
(z) giro de Eje
3 Marco
4 Marco 1
Marco
2 Marco
m 3.5
Figura 2.12 Referencias de medidas de los marcos 1 y 2 para los momentos de inercia
Figura 2.13 Referencias de medidas de los marco 3 y 4 para los momentos de inercia
Tabla 4 Características de cada marco del concentrador solar
Marco 1 Marco 2 Marco 3 Marco 4
Medida [m] Medida [m]
Densidad
Material PTR calibre #14 Azul
Área
3.5m
cmar1,2
m 0.0381 fmar 1,2 m
0.1016 emar1,2
(z) giro de Eje
(z) giro de
Eje cmar3,4 0.0381m
m
1016 . 0
Tabla 4 Características de cada marco (continuación) Volumen
Masa [kg.]
Ecuación del momento de inercia de un prisma rectangular sólido (cada marco) con respeto al eje
de giro del concentrador
Ecuación del momento de inercia de un prisma rectangular sólido (cada marco) con respeto al centro
de masas
Tabla 5 Momentos de inercia de cada marco
MARCO 1 MARCO 2 MARCO 3 MARCO 4
Momento de inercia con respecto al centro de masas (Matlab® 2010 versión demo)
Momento de inercia con respecto al centro de masas (MSC.VisualNastran® 4D 2004 demo)
Momento de inercia con respecto al eje de giro (Matlab® 2010 versión demo)
** Véase el desarrollo en el Apéndice A , pág. 141,“marco.m”
ver en la figura 2.12 y 2.13
En la tabla 5 se muestran los momentos de inercia calculados matemáticamente usando el programa de Matlab® 2010 versión demo y comparando el momento de inercia con respecto al centro de masas con los obtenidos en el paquete de MSC.Visual Nastran® 4D 2004 demo.
2.2.3
Soleras del concentrador solarEl concentrador contiene 25 soleras de , que en el sistema
La función de las soleras es soportar y darle rigidez a la lámina de acero inoxidable con acabado espejo, para que no se deforme por los ventarrones que pudieran existir.
Isométrica a)Vista
Marcos s
parabólico Perfiles
Soleras (z)
giro de Eje
) enumeradas
(soleras Superior
b)Vista
1 2 3 4 5
6 7 8 9 10
11 12 13 14 15
16 17 18
21
19 20
22 23 24 25
Soleras Marcos
Figura 2.15 Fotografía de las soleras del concentrador solar
Tabla 6 Características de las soleras del concentrador solar
Soleras 1 a la 5 y 21 a la 25 Soleras de la 6 a la 20
Medida [m]
Masa
Área
Volumen
Densidad de cada solera
Ecuación del momento de inercia con respecto al
centro de masas** Momento de inercia con respecto al eje de giro (Eje z)**
** Véase el desarrollo en el Apéndice A, pág. 143, „soleras.m‟
ver en la figura 2.16 y 2.17 1 Solera 2
Solera
9
Solera Solera3
6 Solera
7 Solera 14
Solera 8
Solera
11
Solera Solera16
12 Solera
Solera19 13
Solera
18 Solera
Figura 2.16 A) Medidas de soleras de la 1 a la 5 y de la 21 a la 25
Figura 2.16 B) Medidas de soleras de la 5 a la 20
Tabla 7 Momentos de inercia de las soleras del concentrador solar
Momento de inercia con respecto al centro de masas (Matlab® 2010 versión demo) Soleras 1 a la 5 y 21 a la 25 Soleras de la 6 a la 20
Momento de inercia con respecto al centro de masas (MSC.VisualNastran® 4D 2004 demo) Soleras 1 a la 5 y 21 a la 25 Soleras de la 6 a la 20
Momento de inercia con respecto al eje de giro (Matlab® 2010 versión demo)
m i1.1695
m 0.0047625 h
m g0.0254
m 0.0047625 h
m g0.0254 m
i1.186
Tabla 7 Momentos de inercia de las soleras del concentrador solar (continuación)
Momento de inercia con respecto al eje de giro (Matlab® 2010 versión demo)
2.2.4
LáminaLa lámina de acero inoxidable # 304 con acabado espejo es el espejo del concentrador, a la cual se le ha dado la forma cilíndrico-parabólica, apoyado en el esqueleto del marco de PTR, los perfiles parabólicos y las soleras (figura 2.17 y 2.18).
Figura 2.17 Fotografía de la lámina de acero inoxidable del concentrador solar cilindro-parabólico 304
# inoxidable acero
de Lámina
Figura 2.18 Representación de la lámina de acero inoxidable #304 en Mechanical Desktop® 2004 demo
Tabla 8 Características de la lámina de acero inoxidable #304 acabado espejo Ecuación de la parábola
875 . 0 50 . 3
2
x
y
Material
Acero inoxidable # 304 con acabado espejo
Densidad Masa d
Área de la parábola Volumen
Ecuación del momento de inercia de un cilindro-parabólico sólido con respeto al centro de
masas**
Momento de inercia con respecto al foco de la parábola (eje de giro)
ver figura 2.9
** Véase el desarrollo en el Apéndice A, pág. 146, „lámina.m‟
304 # inoxidable acero
de Lámina (z)
En la figura 2.19 se muestran las medidas de la lámina de acero inoxidable # 304 para el concentrador solar cilindro-parabólico del presente tema de tesis.
Figura 2.19 Medidas de la lámina de acero inoxidable # 304 acabado espejo
Tabla 9 Momentos de inercia de la lámina de acero inoxidable #304 acabado espejo
Momento de inercia con respecto al centro de masas (MATLAB® 2010 demo)
Momento de inercia con respecto al centro de masas (MSC.visualNastran® 4D
2004 demo)
Momento de inercia con respecto al foco de la parábola (eje de giro) (Matlab® 2010 versión demo)
2.2.5
Base del tensor del concentradorLa base del tensor sirve para sujetar los extremos más largos del marco mientras que el cable de acero galvanizado corrige el pandeo del marco 3 y levantando la base del tensor.
La base del tensor es de PTR calibre #14 Azul de , se tienen uno en
cada extremo del concentrador, en total son dos. Sus características y medidas se muestran en la figura 2.20.
(z) giro de Eje
m
6.2 d
m
1.75 a
m
0.875 b
m
Figura 2.20 Fotografía de la base del tensor y el cable tensor del concentrador solar lado derecho
Tabla 10 Características de la base de los tensores del concentrador
Densidad Material PTR calibre #14 Azul
Masa Medidas
Área de la parábola Volumen de la parábola
Ecuación del momento de inercia de un prisma rectangular sólido con respeto al centro de masas
Momento de inercia con respecto al foco de la parábola (eje de giro)
ver figura 2.21
** Véase el desarrollo en el Apéndice A, pág. 148, „tensor.m‟
tensor del Base
Tensor
inoxidable
acero de Lámina parabólico
Perfil Solera
m
0.0254 c
m
0.0254 b
m
305 . 0 a
Tabla 11 Momento de inercia de la base de los tensores del concentrador
TENSOR DERECHO TENSOR IZQUIERDO
Momento de inercia con respecto al centro de masas (Matlab® 2010 versión demo)
Momento de inercia con respecto al centro de masas (MSC.visualNastran® 4D 2004 demo)
Momento de inercia con respecto al eje de giro (Matlab® 2010 versión demo)
Figura 2.22 Base del tensor izquierdo y derecho Derecho
Tensor del Base Izquierdo
Tensor del Base
Tensores los
de Base (z)
giro de Eje
![Figura 1.1 Concentradores solares a) CCP, b) CRS, c) DP [1w] 1.1.1 Ventajas del empleo de concentradores solares](https://thumb-us.123doks.com/thumbv2/123dok_es/4958074.75079/26.918.170.778.169.392/figura-concentradores-solares-ccp-ventajas-empleo-concentradores-solares.webp)
![Figura 1.2 a) Ubicación del seguidor solar en la estructura del concentrador, b) Vista lateral del sensor del seguidor y principio de funcionamiento [6]](https://thumb-us.123doks.com/thumbv2/123dok_es/4958074.75079/29.918.205.764.441.654/figura-ubicacion-seguidor-estructura-concentrador-seguidor-principio-funcionamiento.webp)