I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
CONTROL VECTORIAL DE LA VELOCIDAD DE
UN MOTOR DE INDUCCIÓN UTILIZANDO LA
TARJETA DS1103 DE dSPACE
T E S I S
QUE PARA OBTENER EL GRADO DE:MAESTRO EN CIENCIAS CON ESPECIALIDAD EN INGENIERÍA
ELÉCTRICA
PRESENTA
ING.
ANTONIO
OBREGÓN
TENORIO
DEDICATORIA
:
A mi familia por su apoyo incondicional y en forma muy especial a Melisa Alejandra
por ser mi principal fuente de motivación, gracias por estar conmigo
AGRADECIMIENTOS
Al Instituto Politécnico Nacional, en especial a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica por su apoyo.
Al Dr. Jaime José Rodríguez Rivas por sus consejos, sugerencias y asesoría durante la realización de este trabajo de tesis.
A los Dres.: Tadeusz Niewierowicz Swiecicka, Leszek Kawecki Zlotkowska, Raúl Ángel Cortés Mateos, Daniel Ruiz Vega y Domitilo Libreros, por las sugerencias realizadas durante la revisión de la tesis.
A los profesores de la SEPI – ESIME - ZACATENCO por sus conocimientos transmitidos.
RESUMEN
En este trabajo se presenta la simulación e implementación del control vectorial de velocidad de un motor de inducción, empleando el método indirecto con orientación del campo magnético del rotor, utilizando la tarjeta DS1103 de dSPACE®.
En la etapa de simulación del control vectorial, las ecuaciones descritas son vectoriales, lo que simplifica la simulación al obtener un modelo más compacto. Se emplea el programa Simulink®de MATLAB para realizar las simulaciones. ®
Una vez que se obtienen resultados aceptables de la simulación, se modifica el diagrama a
bloques del modelo realizado con Simulink® de MATLAB para incluir los bloques
correspondientes a
®
la tarjeta DS1103 de dSPACE® y de esta forma realizar el control en tiempo real.
Para la implementación se emplean sensores de efecto Hall en conjunto con la tarjeta DS1103 de dSPACE® en la medición de las corrientes terminales. Para la medición de la velocidad se emplea un encoder incremental y la interfaz que para este propósito tiene la tarjeta DS1103 de dSPACE®.
Los voltajes de alimentación para el motor de inducción se generan utilizando la modulación del ancho de los pulsos con vectores espaciales.
ABSTRACT
This thesis presents the simulation and implementation of vector control speed of an induction motor, using the indirect method with orientation of the magnetic field of the rotor, using the card DS1103 of dSPACE®.
In the simulation stage of vector control, the described equations are vectorial, what simplifies the simulation on having obtained a more compact model. The program Simulink® of MATLAB® is used to perform the simulations.
Once acceptable results of the simulation are obtained, the model made with Simulink® of
MATLAB® is modified to include the blocks corresponding to card DS1103 of dSPACE®
and this form to make the control in real time.
For the implementation Hall effect sensors are used altogether with card DS1103 of dSPACE® in the measurement of the terminal currents. For the measurement of the speed there is used an incremental encoder and the interface that for this purpose has the card
DS1103 of dSPACE®.
The supply voltages for the induction motor are generated using space vector pulse width modulation.
CONTENIDO
RESUMEN ...i
ABSTRACT ...ii
CONTENIDO ...iii
LISTA DE FIGURAS...vi
LISTA DE TABLAS... x
GLOSARIO DE TÉRMINOS ...xi
CAPITULO 1 ... 1
INTRODUCCIÓN... 1
1.1 OBJETIVOS... 1
1.2 JUSTIFICACIÓN... 2
1.3 ESTADO DEL ARTE ... 2
1.4 TRABAJOS PREVIOS REALIZADOS EN LA SEPI-ESIME ... 6
1.5 APORTACIONES... 7
1.6 ESTRUCTURA DE LA TESIS... 7
CAPITULO 2 ... 9
MODELADO Y SIMULACIÓN DEL SISTEMA DE CONTROL... 9
2.1 INTRODUCCIÓN... 9
2.2 REPRESENTACIÓN DE LOS DEVANADOS dq... 10
2.2.1 Representación de los devanados dq del estator... 10
2.2.2 Representación de los devanados del rotor sobre los mismos ejes dq del estator13 2.2.3 Inductancia mutua entre los devanados dq en el estator y el rotor ... 14
2.3 RELACIONES MATEMÁTICAS DE LOS DEVANADOS dq (A UNA VELOCIDAD ARBITRARIA ωd)... 15
2.3.1 Relación de las variables de los devanados dq con las variables de los devanados trifásicos ... 17
2.3.2 Flujos de los devanados dq en términos de sus corrientes ... 18
2.3.3 Voltajes de los devanados dq... 19
2.3.4 Obtención de flujos teniendo corrientes y voltajes como entradas ... 20
2.4 ELECCIÓN DEL VALOR DE LA VELOCIDAD ωd DE LOS DEVANADOS dq21 2.5 PAR ELECTROMAGNÉTICO ... 22
2.6 ELECTRODINÁMICA... 23
2.7 CIRCUITOS EQUIVALENTES DE LOS EJES dq... 23
2.8 MODELO DEL MOTOR CON λr ALINEADO CON EL EJE d... 24
2.8.1 Cálculo de ωdA... 25
2.8.2 Cálculo de Tem ... 25
2.8.3 Dinámica del flujo del rotor sobre el eje d... 26
2.8.4 Modelo del motor ... 27
2.9 CONTROL VECTORIAL... 28
2.9.1 Lazo de control de velocidad... 29
2.9.2 Cálculo de los voltajes del estator ... 30
2.10 SIMULACIÓN COMPUTACIONAL ... 32
2.10.1 Cálculo de condiciones iniciales... 34
2.11 SIMULACION DEL CONVERTIDOR DE CD A CA EMPLEANDO SV-PWM.. 37
2.12 CURVAS DE PAR Y VELOCIDAD CON UN CONVERTIDOR DE CD A CA IDEAL ... 42
2.13 CURVAS DE PAR Y VELOCIDAD CON UN CONVERTIDOR DE CD A CA NO IDEAL ... 43
CAPITULO 3 ... 44
DESCRIPCIÓN DEL HARDWARE... 44
3.1 INTRODUCCIÓN... 44
3.2 TARJETA DS1103... 46
3.3 MEDICIÓN DE CORRIENTES TERMINALES... 48
3.4 MEDICÓN DE VELOCIDAD... 52
3.5 CONVERTIDOR DE CD A CA... 55
3.6 MOTOR DE INDUCCIÓN ... 57
3.7 TARJETA DE CONTROL BC200 PARA EL ACCCIONAMIENTO Y CONTROL DE LA MÁQUINA DE CD... 58
CAPITULO 4 ... 61
PROGRAMACIÓN DE LA TARJETA DS1103... 61
4.1 INTRODUCCIÓN... 61
4.2 IMPLEMENTACIÓN DEL CONTROL DE VELOCIDAD ... 63
4.2.1 Procesamiento de las señales de los sensores de corriente... 63
4.2.2 Procesamiento de la señal del encoder ... 65
4.2.3 Lazo de control de la corriente
i
sd ... 674.2.4 Lazo de control de la corriente
i
sq ... 704.2.5 Lazo de control de la velocidad
ω
mech... 724.2.6 Generación de las señales SV-PWM... 74
4.3 CARGA DEL PROGRAMA EN LA TARJETA DS1103... 76
4.4 PROCESAMIENTO DE LAS SEÑALES DE HABILITACIÓN Y FALLA ... 79
4.5 INTERFAZ GRÁFICA HOMBRE MÁQUINA DE dSPACE®... 82
CAPITULO 5 ... 85
RESULTADOS EXPERIMENTALES ... 85
5.1 INTRODUCCIÓN... 85
5.2 VOLTAJES DE CONTROL PARA EL SV-PWM... 86
5.3 CORRIENTES DE FASE ... 88
5.4 VOLTAJES DE FASE ... 90
5.5 VARIACIÓN DE VELOCIDAD ... 90
5.5.1 Variación de velocidad en sentido contrario a las manecillas del reloj... 91
5.5.2 Variación de velocidad en sentido de las manecillas del reloj ... 92
5.6 INVERSIÓN DEL SENTIDO DE GIRO DE LA FLECHA DEL MOTOR ... 94
5.7 VARIACIÓN DEL PAR DE CARGA... 96
CAPITULO 6 ... 98
CONCLUSIONES Y RECOMENDACIONES ... 98
6.1 INTRODUCCIÓN... 98
6.3 APORTACIONES DE LA TESIS ... 99
6.4 RECOMENDACIONES PARA TRABAJOS FUTUROS ... 100
REFERENCIAS ... 101
ANEXO A... 105
SINTONIZACIÓN DE LOS LAZOS DE CONTROL DE CORRIENTE Y VELOCIDAD... 105
A.1 INTRODUCCIÓN... 105
A.2 OBJETIVOS DEL CONTROLADOR PI... 105
A.3 DISEÑO DE LOS LAZOS DE CONTROL DE CORRIENTE... 107
A.3.1 Diseño de los lazos de control de corriente por eliminación de polos y ceros . 107 A.3.2 Diseño de los lazos de control de corriente por solución de sistema de ecuaciones... 109
A.4 DISEÑO DEL LAZO DE CONTROL DE VELOCIDAD ... 111
A.5 RESULTADOS DE LA SIMULACIÓN EN LA SIMULACIÓN... 113
ANEXO B ... 115
PROGRAMA PARA CARGAR LOS PARÁMETROS Y CALCULAR LAS CONDICIONES INICIALES DEL SISTEMA ... 115
ANEXO C... 120
DATOS DE LAS MÁQUINAS ELÉCTRICAS... 120
C.1 DATOS DEL MOTOR DE INDUCCIÓN ... 120
C.2 DATOS DEL MOTOR DE CD... 121
ANEXO D... 122
OPERACIÓN DEL CONVERTIDOR DE CD A CA... 122
D.1 CARACTERÍSTICAS GENERALES ... 122
D.2 CONECTORES DE LAS FUENTES DE ALIMENTACIÓN... 123
D.3 CONECTORES DE LAS SEÑALES DE CONTROL ... 125
D.4 COMPONENTES DE PRUEBA Y CALIBRACIÓN ... 128
D.5 INSTRUCCIONES DE OPERACIÓN DE LA TARJETA ... 128
ANEXO E ... 130
ESTIMACIÓN DE VOLTAJES TERMINALES ... 130
E.1 INTRODUCCIÓN ... 130
E.2 SIMULACIÓN DE LA ESTIMACIÓN DE VOLTAJES DE FASE ... 130
E.3 IMPLEMENTACIÓN PARA LA ESTIMACIÓN DE LOS VOLTAJES DE FASE ... 135
E.4 RESULTADOS... 138
ANEXO F ... 140
ESPECIFICACIONES TÉCNICAS DE LA TARJETA DS1103 ... 140
ANEXO G... 142
HOJAS DE DATOS DEL SENSOR DE VOLTAJE... 142
ANEXO H... 144
LISTA DE FIGURAS
Figura 1-1. Etapas de desarrollo del trabajo de tesis. ... 1
Figura 2-1. Etapas para desarrollar la simulación del sistema a implementar. ... 9
Figura 2-2. Representación de la fmm del estator mediante los devanados dq equivalentes. (a) Devanados trifásicos originales; (b) Devanados bifásicos equivalentes; (c) Componentes sobre los ejes dq... 11
Figura 2-3. Representación de la fmm del rotor mediante los devanados dq equivalentes. . 13
Figura 2-4. Representación del rotor y el estator mediante los devanados dq equivalentes.14 Figura 2-5. Transformación de coordenadas en Simulink® para las corrientes del estator... 16
→ abc dq Figura 2-6. Transformación de coordenadas en Simulink® para los voltajes del estator. ... 16
→ abc dq Figura 2-7. Transformación de coordenadas en Simulink® para las corrientes del estator... 17
dq → abc Figura 2-8. Transformación de coordenadas en Simulink® para los voltajes del estator. ... 18
dq → abc Figura 2-9. Diagrama a bloques en Sumulink® para representar la ecuación 2-27. ... 21
Figura 2-10. Diagrama a bloques en Sumulink® para representar la ecuación 2-34. ... 23
Figura 2-11. Circuitos equivalentes de los devanados dq. (a) Eje d; (b) Eje q... 24
Figura 2-12. Circuitos equivalentes de los devanados dq. ... 26
Figura 2-13. Diagrama a bloques en Simulink® del estimador de θda... 27
Figura 2-14. Esquema del control de velocidad por campo orientado del rotor. ... 28
Figura 2-15. Lazo de control de velocidad. ... 29
Figura 2-16. Lazos de control de corriente. (a) isd; (b) isq. ... 32
Figura 2-17. Diagrama en Simulink® del modelo del motor de inducción. ... 34
Figura 2-18. Convertidor de CD a CA con SV-PWM. ... 39
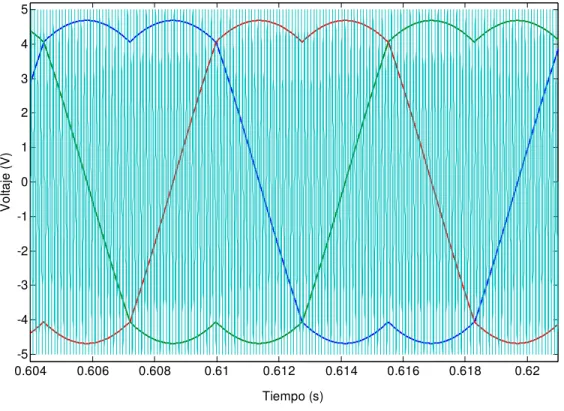
Figura 2-19. Señales de control SV-PWM comparadas con la señal triangular a la frecuencia de conmutación. ... 39
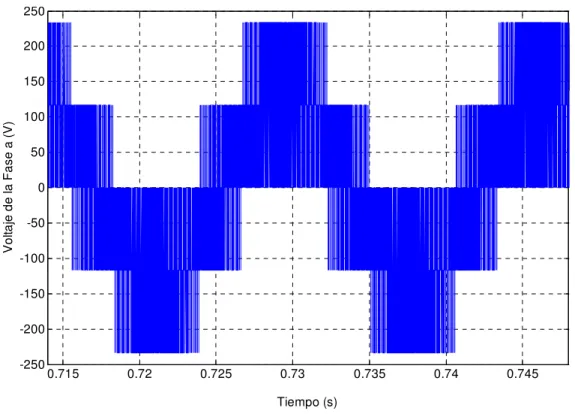
Figura 2-20. Voltaje de referencia para la fase ... 40 a Figura 2-21. Voltaje de la fase a generada en el convertidor de CD a CA... 40
Figura 2-22. Voltaje de la fase a generada en el convertidor de CD a CA después de ser filtrada... 41
Figura 2-23. Corriente simulada de la fase a... 42
Figura 2-24. Curvas de par y velocidad utilizando un convertidor de CD a CA ideal. ... 42
Figura 2-25. Curvas de par y velocidad utilizando un convertidor de CD a CA no ideal. .. 43
Figura 3-1. Aspecto físico del sistema implementado... 44
Figura 3-2. Diagrama a bloques del sistema implementado... 45
Figura 3-3. Tarjeta DS1103. ... 46
Figura 3-4. Diagrama a bloques de la tarjeta DS1103... 47
Figura 3-5. Diagrama a bloques del funcionamiento de la tarjeta DS1103... 48
Figura 3-6. Efecto Hall. ... 49
Figura 3-7. Sensores de corriente. ... 49
Figura 3-9. Circuito de conexión del sensor de corriente... 50
Figura 3-10. Señales entregadas por el sensor de corriente... 51
Figura 3-11. Adaptación de las señales de corriente. ... 52
Figura 3-12. Adaptación de las señales de corriente. ... 52
Figura 3-13. Encoder incremental. ... 53
Figura 3-14. Patrones de líneas y pulsos correspondientes del encoder incremental... 53
Figura 3-15. Aspecto físico de algunos encoders incrementales... 54
Figura 3-16. Adaptación de la señal del encoder... 54
Figura 3-17. Aspecto físico del convertidor de CD a CA... 55
Figura 3-18. Diagrama eléctrico del convertidor de CD a CA. ... 56
Figura 3-19. Aspecto físico externo e interno del motor de inducción. ... 58
Figura 3-20. Aspecto físico de la tarjeta de control BC200 y de la máquina de CD... 58
Figura 3-21. Configuración de la tarjeta de control BC200. ... 59
Figura 3-22. Curva característica de par y velocidad del motor de CD. ... 60
Figura 4-1. Ajustes para trabajar en tiempo real. ... 61
Figura 4-2. Diagrama a bloques para la implementación del control de velocidad. ... 62
Figura 4-3. Diagrama a bloques para la adaptación de las señales de los sensores de corriente. ... 63
Figura 4-4. Ajustes del bloque del canal analógico/digital. ... 64
Figura 4-5. Ajustes del bloque de filtrado. ... 64
Figura 4-6. Adquisición y adaptación de la señal del encoder. ... 65
Figura 4-7. Ajustes para el canal del encoder... 65
Figura 4-8. Ajustes para la lectura del encoder. ... 66
Figura 4-9. Lazo de control de isd modificado para la implementación... 67
Figura 4-10. Ventana de ajustes del interruptor Switch1. ... 68
Figura 4-11. Ventana de ajustes del interruptor Switch2. ... 68
Figura 4-12. Simulación del voltaje del estator sobre el eje d... 69
Figura 4-13. Ajustes del integrador del lazo de control de isd... 70
Figura 4-14. Lazo de control de isq modificado para la implementación... 71
Figura 4-15. Simulación del voltaje del estator sobre el eje q... 71
Figura 4-16. Ajustes del integrador del lazo de control de isq... 72
Figura 4-17. Lazo de control de ωmech modificado para la implementación. ... 73
Figura 4-18. Simulación de la corriente del estator sobre el eje q... 73
Figura 4-19. Ajustes del integrador del lazo de control de ωmech... 74
Figura 4-20. Generación de las señales SV-PWM. ... 75
Figura 4-21. Ventana de ajustes para el bloque DS1103SL_DSP_PWM3. ... 75
Figura 4-22. Ajustes para trabajar en tiempo real. ... 77
Figura 4-23. Ajustes del método numérico empleado en la implementación. ... 77
Figura 4-24. Comando Build. ... 78
Figura 4-25. Sección de procesamiento de señales de falla y habilitación... 80
Figura 4-26. Ajustes del bloque de entradas digitales. ... 81
Figura 4-27. Ajustes del bloque de salidas digitales. ... 81
Figura 4-28. Ventana de interfaz gráfica. ... 82
Figura 4-29. Botones interactivos de Control Desk®. ... 83
Figura 4-31. Ventana de graficación de Control Desk®. ... 84
Figura 4-32. Indicador numérico de la interfaz gráfica. ... 84
Figura 5-1.Diagrama general del sistema experimental. ... 85
Figura 5-2.Voltajes de control para generar el SV-PWM. ... 86
Figura 5-3. Señales SV-PWM adquiridas mediante el puerto de entradas digitales. ... 87
Figura 5-4. Señales de salida en condiciones normales... 87
Figura 5-5. Señales de salida en condición de falla o con el sistema desactivado. ... 88
Figura 5-6. Corriente de la fase a obtenida de la implementación. ... 89
Figura 5-7. Corrientes de fase obtenidas en la implementación... 89
Figura 5-8. Voltajes de fase obtenidos en la implementación... 90
Figura 5-9. Interfaz gráfica para el monitoreo del control de velocidad con = 168 / ωmech rad s. ... 91
Figura 5-10. Interfaz gráfica para el monitoreo del control de velocidad con = 46 / ωmech rad s. ... 92
Figura 5-11. Interfaz gráfica para el monitoreo del control de velocidad con = - 168 / ωmech rad s. ... 93
Figura 5-12. Interfaz gráfica para el monitoreo del control de velocidad con = - 61 / ωmech rad s. ... 93
Figura 5-13. La flecha del motor gira en sentido contrario a las manecillas del reloj. ... 94
Figura 5-14. La flecha del motor se detiene. ... 95
Figura 5-15. La flecha del motor gira en el sentido de las manecillas del reloj. ... 95
Figura 5-16. Variación del par de carga aplicado al motor de inducción... 96
Figura A-1. Representación simplificada del sistema de control ... 105
Figura A-2. Margen de fase... 106
Figura A-3. Lazo de control de isq ... 107
Figura A-4. Lazo de control de isd ... 109
Figura A-5. Lazo de control de ωmech ... 111
Figura A-6. Gráficas de par y velocidad por eliminación de polos y ceros ... 113
Figura A-7. Gráficas de par y velocidad por el método de solución del sistema de ecuaciones... 114
Figura B-1. Diagrama a bloques de los pasos para el cálculo de parámetros e inicialización del sistema. ... 115
Figura D-1. Convertidor de CD a CA. ... 123
Figura D-2. Conectores de alimentación. (a) 20 VDC. (b) 12 VDC. ... 124
Figura D-3. Conector VDC. ... 125
Figura D-4. Conector de las señales de control. ... 125
Figura D-5. Puente inversor trifásico. ... 127
Figura D-6. LED indicador de funcionamiento correcto de la sección de alto voltaje... 129
Figura E-1. Ubicación de los interruptores en el puente inversor. ... 130
Figura E-2. Generación de señales de prueba... 132
Figura E-3. Estados de conmutación simulados... 133
Figura E-4. Voltajes de fase recuperados. ... 133
Figura E-5. Voltajes de fase calculados. ... 135
Figura E-6. Sensor de voltaje. ... 136
Figura E-8. Generador de señales SV-PWM... 137
Figura E-9. Implementación para la estimación de los voltajes de fase... 137
Figura E-10. Estados de conmutación de la implementación... 138
Figura E-11. Voltajes resultantes de la implementación. ... 139
LISTA DE TABLAS
Tabla 4-1. Parámetros y condiciones iniciales. ... 76
Tabla C-1. Datos de placa del motor de inducción... 120
Tabla C-2. Parámetros del motor de inducción obtenidos experimentalmente. ... 121
Tabla C-3. Datos de placa del motor de CD... 121
Tabla D-1. Etiquetas del conector de las señales de control. ... 126
GLOSARIO DE TÉRMINOS
abc dq→ Transformación de variables de los devanados abc a los devanados dq
B Densidad de flujo magnético, [T]
BJT Transistor Bipolar de Unión (Bipolar Junction Transistor)
CD Corriente directa
CA Corriente alterna
d Espesor del elemento Hall, [m]
e Carga del electrón, [C]
dq abc→ Transformación de variables de los devanados dq a los devanados abc
c
f Frecuencia de cruce, [Hz]
a s
F Vector espacial fuerza magnetomotriz del estator referido al eje a del estator,
[A·vuelta]
A r
F Vector espacial fuerza magnetomotriz del rotor referido al eje A del rotor,
[A·vuelta]
fmm Fuerza magnetomotriz, [A·vuelta]
( )
cG s Función de transferencia del controlador en el dominio de Laplace
( )
CLG s Función de transferencia de lazo cerrado en el dominio de Laplace
,
I OL
G Función de transferencia de corriente de lazo abierto
( )
OLG s Función de transferencia de lazo abierto en el dominio de Laplace
( )
pG s Función de transferencia de la planta en el dominio de Laplace
,OL
GΩ Función de transferencia de velocidad de lazo abierto
a
i Corriente de la fase del estator, [A] a
b
i Corriente de la fase b del estator, [A]
c
i Corriente de la fase c del estator, [A]
I Corriente de CD, [A]
a
I Corriente de armadura [A]
IGBT Transistor bipolar de compuerta aislada (Insulated Gate Bipolar Transistor)
r
i Vector espacial corriente del rotor referido al eje d, [A]
A r
i Vector espacial corriente del rotor referido al eje A del estator, [A]
rd
i Componente de la corriente del rotor sobre el eje d, [A]
rq
i Componente de la corriente del rotor sobre el eje q, [A]
a s
i Vector espacial corriente del estator referido al eje a del estator, [A]
d s
i Vector espacial corriente del estator referido al eje d, [A]
s
i Vector espacial corriente del estator referido al eje d, [A]
sd
i Componente de la corriente del estator sobre el eje d, [A]
sq
eq
J Inercia combinada de la carga y el motor, [kg·m2]
i
kΩ Constante integral del lazo de velocidad
iI
k Constante integral de los lazos de corriente
p
k Ω Constante proporcional del lazo de velocidad
pI
k Constante proporcional de los lazos de corriente
kφ Constante de magnetización [V·s/rad]
LED Diodo emisor de luz (Light Emmiter Diode)
r
LA Inductancia de dispersión del rotor, [H]
s
LA Inductancia de dispersión del estator, [H]
m
L Inductancia de magnetización, [H]
r
L Inductancia del rotor, [H]
s
L Inductancia del estator, [H]
s
N Número de vueltas por fase en el estator
p Número de polos de la máquina
PC Computadora personal (Personal Computer)
PI Proporcional Integral
PID Proporcional Integral Derivativo
PM Margen de fase, [°, rad]
I
PM Margen de fase del lazo de corriente, [°, rad]
PMΩ Margen de fase del lazo de velocidad, [°, rad]
PWM Modulación por ancho de pulso (Pulse Width Modulation)
rev min Revoluciones por minuto
r
R Resistencia del rotor, [Ω]
s
R Resistencia del estator, [Ω]
s Deslizamiento
s Operador de Laplace
SV-PWM Modulación en ancho de pulso por vectores espaciales (Space Vector Pulse Width Modulation)
S-PWM Modulación en ancho de pulso senoidal (Sinusoidal Pulse Width Modulation)
em
T Par electromagnético, [N·m]
L
T Par de carga, [N·m]
S
T Tiempo de muestreo, [s]
TTL Lógica Transistor Transistor (Transistor Transistor Logic). Nivel alto:
. Nivel bajo: .
5 V
+ 0 V
a
V Fasor de voltaje de la fase a, [V]
a
v Voltaje en la fase del estator, [V] a
aN
v Voltaje de la fase del inversor con respecto a la terminal negativa de ,
[V]
b
v Voltaje en la fase b del estator, [V]
bN
v Voltaje de la fase b del inversor con respecto a la terminal negativa de ,
[V]
d V
c
v Voltaje en la fase del estator, [V] c
cN
v Voltaje de la fase del inversor con respecto a la terminal negativa de ,
[V]
c Vd
,
control a
v Voltaje de control para la fase a, [V]
,
control b
v Voltaje de control para la fase b, [V]
,
control c
v Voltaje de control para la fase c, [V]
d
V Voltaje del bus de CD , [V]
H
V Voltaje Hall, [V]
N
v Componente de secuencia cero del voltaje del estator, [V]
r
v Vector espacial voltaje del rotor referido al eje d, [V]
rd
v Componente del voltaje del rotor sobre el eje d, [V]
rq
v Componente del voltaje del rotor sobre el eje q, [V]
s
v Vector espacial voltaje del estator referido al eje d, [V]
a s
v Vector espacial voltaje del estator referido al eje a del estator, [V]
sd
v Componente del voltaje del estator sobre el eje d, [V]
sq
v Componente del voltaje del estator sobre el eje q, [V]
tri
v Señal triangular a la frecuencia de conmutación, [V]
( )
X s Salida del sistema en el dominio de Laplace
r
XA Reactancia de dispersión del rotor, [Ω]
s
XA Reactancia de dispersión del estator, [Ω]
m
X Reactancia de magnetización, [Ω]
θ
Δ Diferencia de posición medida por el encoder, [rad]
θ Posición medida por el encoder, [rad]
da
θ Ángulo del conjunto de ejes dq con respecto a la fase a del estator, [rad]
r
λ Flujo del rotor, [Wb]
rd
λ Componente del flujo del rotor sobre el eje d, [Wb]
rq
λ Componente del flujo del rotor sobre el eje q, [Wb]
s
λ Flujo del estator , [Wb]
sd
λ Componente del flujo del estator sobre el eje d, [Wb]
sq
λ Componente del flujo del estator sobre el eje q, [Wb]
ξ Variable de integración
σ Coeficiente de dispersión total
r
OL
φ Ángulo de fase de la función de transferencia de lazo abierto, [°, rad]
c
ω Frecuencia angular de cruce, [rad/s]
cI
ω Frecuencia angular de cruce para el lazo de corriente, [rad/s]
c
ω Ω Frecuencia angular de cruce para el lazo de velocidad, [rad/s]
d
ω Velocidad instantánea de los ejes dq en el entrehierro, [rad/s]
dA
ω Velocidad instantánea de los ejes dq en el entrehierro con respecto a la
velocidad del eje A del rotor (Velocidad de deslizamiento), [rad/s]
m
ω Velocidad del rotor en radianes eléctricos por segundo, [rad/s]
mech
ω Velocidad del rotor en radianes actuales, [rad/s]
*
Valores de referencia, por ejemplo: i*sd
Valor pico o máximo, por ejemplo: ˆ
CAPITULO 1
INTRODUCCIÓN
En este capítulo se presentan el objetivo, la justificación, el estado del arte, las aportaciones y la estructura del presente trabajo de tesis.
Figura 1-1. Etapas de desarrollo del trabajo de tesis.
El presente trabajo desarrolla la simulación e implementación del control vectorial de un motor de inducción con rotor tipo jaula de ardilla. Primero, como se muestra en el diagrama de la Fig. 1.1, se realiza la simulación del control vectorial de velocidad de un motor de inducción, empleando el método indirecto con orientación del campo magnético del rotor
utilizando el programa Simulink® de MATLAB®. Una vez que la simulación produce
resultados aceptables, se aprende el funcionamiento de la tarjeta DS1103 y se estudia la forma de utilizarla en conjunto con sensores de efecto Hall para la adquisición de las corrientes terminales de la máquina y con un encoder de tipo incremental para la medición de la velocidad y el sentido de giro del motor de inducción. Como última etapa en el desarrollo de la tesis, se realiza la implementación del control, para lo cual se modifica el diagrama a bloques utilizado en la etapa de simulación, sustituyendo el bloque que simula al motor para trabajar con las señales de corriente y velocidad medidas en el motor que se encuentra en el laboratorio.
1.1 OBJETIVOS
Mediante el desarrollo de este trabajo de tesis, se pretende lograr los objetivos presentados a continuación:
• Modelar, simular y analizar el comportamiento dinámico del control vectorial
ardilla con orientación del flujo del rotor, empleando el programa Simulink® de
MATLAB®.
• Asimilar el funcionamiento y programación de la tarjeta DS1103 de dSPACE®.
• Diseñar, montar y probar una tarjeta para la adquisición de las corrientes terminales de la máquina de inducción empleando sensores de corriente de efecto Hall.
• Aprender a utilizar el encoder incremental montado de fábrica en el motor de
inducción para la medición de su velocidad de giro.
• Implementar el control vectorial del motor de inducción en el laboratorio utilizando la tarjeta DS1103 de dSPACE®.
1.2 JUSTIFICACIÓN
En el presente trabajo se realiza la simulación e implementación en el laboratorio del control vectorial de un motor de inducción para controlar la velocidad utilizando la tarjeta
DS1103 de dSPACE®.
La medición de la velocidad se realizará mediante un encoder de tipo incremental. La medición de las corrientes en las terminales del motor se realizará mediante el empleo de sensores de efecto Hall. Considerando los trabajos previos de simulación que se han realizado en otros trabajos de tesis, así como el equipamiento del laboratorio y el hardware ya desarrollado anteriormente, se considera que existen las condiciones para proceder a la etapa de implementación de un sistema de este tipo.
Por otro lado, este trabajo está vinculado, en lo referente a la adquisición y procesamiento de señales con la tarjeta DS1103 de dSPACE®, al proyecto de investigación apoyado por la Secretaría de Investigación y Posgrado que lleva por título: “CONTROL DE VELOCIDAD DE UN MOTOR DE INDUCCIÓN SIN SENSOR UTILIZANDO EL EFECTO DE LA ANISOTROPÍA MAGNÉTICA DEL ROTOR”(clave SIP: 20082292).
1.3 ESTADO DEL ARTE
de potencia y los convertidores electrónicos de potencia. Las aplicaciones industriales de control de velocidad generalmente se clasifican en controles de velocidad constante y controles de velocidad variable. Tradicionalmente, las máquinas de CA con alimentación senoidal de frecuencia constante se han utilizado en aplicaciones de velocidad constante, mientras que las máquinas de CD se han preferido para aplicaciones de velocidad variable.
Las máquinas de CD tienen varias desventajas importantes como su mayor costo, mayor
inercia del rotor y problemas de mantenimiento por el conmutador y las escobillas. El conmutador y las escobillas además, limitan la velocidad de la máquina y la corriente máxima que se puede manejar, causan problemas de interferencia electromagnética y no se pueden operar en ambientes sucios o explosivos. Sin embargo, los convertidores y controles para máquinas de CD son más sencillos, y su respuesta al par es muy rápida. Las máquinas de CA no tienen las desventajas mencionadas anteriormente para las máquinas de CD. En las últimas dos o tres décadas, hemos visto una extensa investigación y desarrollo tecnológico en el campo del control de velocidad empleando máquinas de CA. Actualmente la mayoría de las aplicaciones de velocidad variable están sustituyendo el uso de máquinas de CD por máquinas de CA, debido al desarrollo alcanzado en la microelectrónica y en los dispositivos semiconductores de potencia como los IGBTs [4, 7, 15, 16, 17, 18].
De entre todos los tipos de máquinas eléctricas de corriente alterna (de inducción, síncronas y de reluctancia variable), la máquina de inducción, en especial la tipo jaula de ardilla es la que más se emplea en la industria. Estas máquinas son muy económicas, robustas y confiables, además de que están disponibles en rangos que van de fracciones de HP hasta capacidades de megawatts, sin embargo, su control es mucho más complejo debido a que son máquinas altamente acopladas, multivariables y no lineales [4, 5, 14]. Las máquinas de baja potencia pueden ser monofásicas, pero las máquinas polifásicas (en especial trifásicas), se emplean con mayor frecuencia en controles de velocidad variable.
Las tres principales opciones propuestas en la literatura para el control de máquinas de inducción con rotor tipo jaula de ardilla, son el control escalar, el control vectorial y el control directo del par.
El control escalar, como su nombre lo indica, se basa en la variación de la magnitud de las variables de control solamente, y desprecia el efecto del acoplamiento en la máquina [1]. Por ejemplo, se puede controlar el voltaje de una máquina para controlar el flujo, y se puede controlar la frecuencia para controlar el par. Sin embargo, el flujo y el par también varían en función de la frecuencia y el voltaje respectivamente. Los accionamientos con control escalar tienen un menor desempeño y el sistema es susceptible a la inestabilidad debido al efecto del alto orden del sistema (estos sistemas son de 5° orden), pero son fáciles de implementar.
compensación, el cual minimiza el efecto de la caída de tensión en la resistencia del estator, la cual es despreciable a altas velocidades.
Los problemas anteriores se resuelven en su mayor parte empleando control vectorial (también llamado control por campo orientado) [1]. La invención del control vectorial a principios de los setentas, y la demostración de que un motor de inducción se puede
controlar como un motor de CD de excitación separada, provocó un renacimiento del
control de alto desempeño de los accionamientos de motores de CA. Debido al desempeño de la máquina de inducción como máquina de CD, al control vectorial también se le conoce como desacoplado, transvectorial u ortogonal.
El control vectorial es aplicable tanto a accionamientos de motores de inducción, como síncronos. Indudablemente, el control vectorial y el correspondiente procesamiento de señales de retroalimentación son complejos y se requiere de auxiliares como la tarjeta empleada en este trabajo.
El motor de inducción es una máquina eléctrica compleja y altamente acoplada por naturaleza, debido a que los devanados equivalentes del rotor se mueven con respecto a los devanados del estator. En esencia, la máquina de inducción se puede ver como un transformador con un secundario móvil, donde los coeficientes de acoplamiento entre las fases del rotor y el estator cambian continuamente con el cambio de posición del rotor. El modelo de la máquina se puede describir mediante ecuaciones diferenciales con inductancias mutuas variantes en el tiempo, pero tal modelo es sumamente complejo. Una máquina trifásica se puede representar mediante una máquina equivalente bifásica, cuyos ejes se encuentran defasados 90°, estos son los llamados eje d o directo (direct) y eje q o en cuadratura (quadrature). Aunque se obtiene un cierto grado de simplificación del modelo de la máquina, aún se tiene el problema de los parámetros variables en el tiempo.
referenciando las variables del rotor y del estator a un marco de referencia común, el cual puede estar girando a una velocidad arbitraria.
En esencia hay dos métodos de control vectorial. Uno, llamado método directo (feedback), el cual fue inventado por Blaschke [20], y el otro conocido como método indirecto (feedforward), inventado por Hasse [48]. En el presente trabajo se emplea el método indirecto. La diferencia principal entre los dos métodos es la forma en que se genera el vector unitario para el control.
El nombre de control por campo orientado se refiere a que se puede orientar tanto el flujo del estator, como el flujo del rotor o el flujo en el entrehierro con el eje d, haciendo que la
componente de flujo correspondiente sobre el eje q sea cero, y logrando con esto el
desacoplamiento deseado [21]. Sin embargo, la orientación del flujo del rotor resulta en un control desacoplado por naturaleza (por ello es el que se emplea en el presente trabajo), mientras que la orientación del flujo del estator o del flujo en el entrehierro causa un efecto de acoplamiento que tiene que ser compensado mediante corrientes de desacoplamiento [23].
A mediados de los años ochenta, se desarrolló una técnica avanzada de control escalar conocida como control directo del par o autocontrol directo [22]. Esta técnica se aplica a inversores fuente de voltaje con control PWM. Este esquema de control, como su nombre lo indica, controla el par y el flujo del estator. Esto lo lleva a cabo mediante la selección, dentro de una tabla de valores, del vector espacial de voltaje que se necesita aplicar en cada instante.
Para obtener una variación en la velocidad de un motor, es necesario controlar el voltaje y la frecuencia aplicados a sus terminales. La forma más común de hacerlo es mediante el empleo de un inversor fuente de voltaje formado por dispositivos semiconductores de estado sólido como los IGBTs.
La estrategia más empleada para la obtención de una CA controlada (voltaje ó corriente, y frecuencia variables), a partir de una fuente de CD es la técnica PWM. Esta técnica consiste básicamente en variar el ciclo de trabajo de conmutación de los dispositivos semiconductores de potencia que forman el puente inversor a un alta frecuencia [1, 4, 7, 14-18, 24, 25]. De los distintos esquemas de PWM, la técnica de SV-PWM, propuesta por Pfaff, Weschta y Wick en 1982 y desarrollada por Van der Broek, Skudelny y Stanke es la que presenta las mayores ventajas, entre las que destacan, una mayor utilización del voltaje del bus de CD, una menor cantidad de armónicas y el hecho de que no existen moduladores separados para cada fase, en vez de ello, el vector de referencia es muestreado como uno solo [14, 24, 26].
1.4 TRABAJOS PREVIOS REALIZADOS EN LA SEPI-ESIME
Algunos de los trabajos realizados en la SEPI-ESIME relacionados con el control de motores de CA y que se revisaron para la realización del presente trabajo, se mencionan a continuación:
• 1998. Se realizó la simulación del control vectorial con el método indirecto de la velocidad de un motor de inducción, las simulaciones se realizaron en lenguaje C [34].
• 1999. Se implementó el control de un motor de inducción con una computadora,
donde la entrada y salida de datos se realizó mediante la utilización de una tarjeta de adquisición de datos PCLAB711B, se experimentó con diferentes técnicas de control del inversor, empleando lenguaje C para la programación [37].
• 2001. Se realizó la simulación del control de un motor de inducción utilizando el método de auto-control directo de flujo y par empleando el programa Simulink®de MATLAB® [30]. También se simuló el control vectorial con el método directo de un motor de inducción utilizando el filtro de Kalman como estimador de la
velocidad, en las simulaciones también se empleó el programa Simulink® de
MATLAB® [32]. En este mismo año se implementó el control de velocidad en lazo abierto de un motor de inducción empleando el DSP TMS320F240 de Texas Instruments®, en este mismo trabajo se utilizó la técnica SV-PWM para generar las señales de control del inversor [38]. Además, se implementó un control de la velocidad en lazo cerrado para un motor de inducción, empleando control directo del par, para la programación de los algoritmos se empleó Simulink®de MATLAB® y lenguaje C [39].
• 2002. Se llevaron a cabo estudios de los principios básicos y simulación del control directo del par empleando el programa Simulink®de MATLAB® [29].
• 2003. Se realizó un trabajo de simulación del control vectorial de velocidad con el método indirecto, donde se emplearon observadores de flujo para la estimación de la velocidad, en las simulaciones se utilizó el programa Simulink®de MATLAB® [35].
• 2004. Se llevó a cabo la simulación de una red neuro-difusa para el control directo del par y el flujo de un motor de inducción empleando lenguaje C [31]. Este mismo año se realizó la simulación del control vectorial con el método directo con orientación del flujo del estator de un motor de inducción a bajas velocidades empleando Simulink® de MATLAB® [33], donde también se estudiaron los principios del SV-PWM.
artificial, se utilizó el programa Simulink® de MATLAB® para realizar las simulaciones [36]. También se llevó a cabo el diseño y construcción de una interfaz de potencia para el accionamiento de un motor de inducción empleando la tarjeta DS1103 de dSPACE®, el control del motor se realizó en lazo abierto, se empleó
Simulink® de MATLAB® para generar las señales SV-PWM para el control del
inversor [9].
• 2006. Se realizó el diseño e implementación de una interfaz de potencia para
controlar un motor de inducción empleando un DSP [40]. En este mismo año se realizó la implementación de un programa de control escalar voltaje/frecuencia en lazo abierto para un motor de inducción utilizando un DSP [49].
1.5 APORTACIONES
Las principales aportaciones que presenta este trabajo son las que se mencionan a continuación:
• El control vectorial de la velocidad de un motor de inducción trifásico utilizando la tarjeta DS1103 de dSPACE®.
• La adquisición de las corrientes terminales de un motor de inducción trifásico
mediante sensores de efecto Hall, empleando la tarjeta DS1103 de dSPACE®.
• La medición de la velocidad de un motor de inducción trifásico mediante un
encoder incremental, utilizando la tarjeta DS1103 de dSPACE®.
• La estimación de los voltajes terminales de un motor de inducción trifásico, a partir de la medición del voltaje en el bus de CD mediante un sensor de efecto Hall y los estados de conmutación de los dispositivos semiconductores del puente inversor, empleando la tarjeta DS1103 de dSPACE®.
1.6 ESTRUCTURA DE LA TESIS
En el capítulo 2 se desarrolla la teoría de control vectorial que sirve de base al trabajo de simulación del control que se llevó a cabo. También se incluye la descripción de la simulación misma y los resultados que de ella se obtuvieron.
El capítulo 3 está dedicado a la descripción del hardware que incluye los sensores de corriente y voltaje, así como el encoder empleado en la medición de la velocidad.
En el capítulo 4 se describen los cambios realizados al diagrama a bloques del control empleado en la simulación, para llevar a cabo la implementación, generando y adquiriendo señales reales.
El capítulo 5 presenta los resultados experimentales obtenidos, a través de imágenes que muestran las señales y parámetros bajo estudio.
En el capítulo 6 se presentan las conclusiones y recomendaciones para trabajos futuros derivados del presente trabajo.
CAPITULO 2
MODELADO Y SIMULACIÓN DEL SISTEMA DE CONTROL
2.1 INTRODUCCIÓN
En este capítulo, como muestra el esquema de la Fig. 2-1, se desarrollan las ecuaciones para analizar la operación de la máquina de inducción bajo condiciones dinámicas. Se emplean vectores espaciales como intermediarios para transformar variables correspondientes a los devanados de las fases abc en variables referidas a los devanados dq equivalentes en un marco de referencia síncrono, las cuales serán utilizadas en el análisis dinámico [2].
Figura 2-1. Etapas para desarrollar la simulación del sistema a implementar.
En el control vectorial empleado en el presente trabajo, el eje está alineado con el flujo del rotor, de tal forma que la componente del flujo del rotor sobre el eje es cero. Considerando lo anterior, primero se desarrolla un modelo de la máquina de inducción donde la condición anterior siempre se cumple [2].
d
q
Después de tener el modelo mencionado anteriormente, se procede a desarrollar el control vectorial para el motor que se tiene en el laboratorio y cuyas especificaciones se presentan en el ANEXO D. Se emplea inicialmente un inversor con modulación de ancho de pulso controlado por corriente. Como último paso en este capítulo, se emplea un inversor con
modulación de ancho de pulso por vectores espaciales (SV-PWM en inglés por “Space
Vector Pulse Width Modulation”).
Se emplea el programa Simulink®de MATLAB para realizar las simulaciones [2, 6]. ®
Una vez que la simulación da resultados aceptables, se emplea el mismo diagrama a bloques con que se realiza la simulación para llevar a cabo la implementación, sólo se sustituyen los bloques que realizan la estimación de la velocidad y las corrientes terminales en la simulación por los bloques de interfaz de la tarjeta DS1103 de dSPACE para adquirir las señales reales, además se elimina el bloque que representa al motor y se emplea un bloque de interfaz de la misma tarjeta para enviar las señales de control
®
SV-PWM hacia el convertidor real de CD a CA el cual alimenta al motor de inducción del laboratorio. Esto se explica más ampliamente en el CAPÏTULO 4.
2.2 REPRESENTACIÓN DE LOS DEVANADOS dq
El flujo del rotor (λr) y el flujo del estator (λs), dependen del ángulo del rotor (θm), es decir, del ángulo que hay entre el eje de la fase a del estator y el eje de la fase A del rotor; debido a que las inductancias mutuas entre los devanados del rotor y del estator dependen de su posición mutua. La principal razón para el análisis de los ejes dq en máquinas eléctricas como las máquinas de inducción es para controlarlas apropiadamente, empleando los principios del control vectorial. En la mayor parte de los textos, este análisis se realiza empleando la Transformación de Park [1, 5, 13, 41]. En este caso se emplea un enfoque desde el punto de vista físico para la transformación, con lo que se llega a los mismos resultados [2].
2.2.1 Representación de los devanados dq del estator
En la Fig. 2-2a en el instante t, las corrientes de fase del estator , e se representan mediante
a
i ib ic a
s
i [2]. Un vector espacial colineal Fsaestá relacionado con isa mediante el factor
s N p:
0 2 3
= + +
a j j j
s a b c
i i e i e π i e 4π3 (2-1)
y
a s a
s s
N
F i
p
Para el análisis dinámico se necesita que el par y el flujo de la máquina se puedan controlar de forma independiente.
En cualquier instante de tiempo, la distribución de la fmm en el entrehierro producida por los devanados trifásicos de la máquina, también puede producirse mediante los dos devanados equivalentes como se muestra en la Fig. 2-2b [2], cada uno distribuido senoidalmente con 3 2 Ns vueltas: un devanado sobre el eje d, y otro sobre el eje . q
Los devanados equivalentes d y están desacoplados magnéticamente uno del otro
debido a su orientación ortogonal.
q
La razón para elegir 3 2 Ns vueltas para los devanados equivalentes es que de esta forma Lm, Rs y LAs son del mismo valor que las de los devanados trifásicos originales [2]. De hecho, si una máquina trifásica se convirtiera a una máquina bifásica empleando la misma carcaza (pero con los devanados diferentes), para entregar la misma potencia y velocidad de salida, se elegiría 3 2 Ns vueltas para cada uno de los dos devanados bifásicos.
Este conjunto de devanados dq puede estar a un ángulo arbitrario (θda) con respecto al eje de la fase a del estator.
Sin embargo, isd e isq en estos dos devanados deben tener valores específicos, los cuales se pueden obtener igualando la fmm producida por los devanados dq (primer miembro de la ecuación 2-3), a la producida por los devanados trifásicos abc representados en el miembro derecho de la ecuación 2-3 mediante un único devanado con Ns vueltas.
(
)
3 2
d
s s
sd sq
N N
i ji
p + = p is (2-3)
La ecuación 2-3 se reduce a:
(
)
2
3
d
sd sq
i + ji = is (2-4)
lo cual muestra que las corrientes en los devanados dq son 2 3 las proyecciones de
s
i sobre los ejes d y q, como se muestra en la Fig. 3-1c:
2 3
sd
i = × proyección de is sobre el eje d. (2-5)
2 3
sq
i = × proyección de is sobre el eje q. (2-6)
2.2.2 Representación de los devanados del rotor sobre los mismos ejes dq
del estator
El vector espacial A r
F se produce mediante el efecto combinado de las corrientes en las
barras del rotor, o mediante los devanados equivalentes trifásicos, cada uno con Ns vueltas, como se muestra en la Fig. 2-3 (cortocircuitados en un rotor tipo jaula de ardilla).
Figura 2-3. Representación de la fmm del rotor mediante los devanados dq equivalentes.
Las corrientes de fase en estos devanados equivalentes del rotor se pueden representar mediante el vector espacial corriente del rotor:
0 2 3
= + +
A j j j
r A B C
4 3
e i e i e
i i π π (2-7)
donde
A
A r
r
s F i
N p
= (2-8)
En la Fig. 2-3 se muestra cómo se pueden producir FrA e irA mediante las componentes e i fluyendo a través de sus respectivos devanados.
rd i
rq
estator, cada uno de los devanados dq en el rotor tiene 3 2 Ns vueltas, y , que es la misma que la de los devanados dq del estator debido a que se eligió el mismo número de vueltas y a que se tienen las mismas trayectorias magnéticas para las líneas de flujo. Cada uno de estos devanados equivalentes del rotor, tiene una
m L
r
R y una del mismo valor que
los de los devanados trifásicos originales. La inductancia mutua entra estos dos devanados ortogonales es cero.
r LA
2.2.3 Inductancia mutua entre los devanados dq en el estator y el rotor
Los devanados equivalentes dq para el estator y el rotor se muestran en Fig. 2-4. La
inductancia mutua entre los devanados del rotor y el estator en el eje d es igual a , debida al flujo de magnetización a través del entrehierro.
m L
De forma similar, la inductancia mutua entre los devanados del rotor y el estator en el eje q
es Lm.
La inductancia mutua entre cualquier devanado sobre el eje d con cualquier devanado sobre el eje q es cero, debido a su orientación ortogonal, lo cual resulta en un acoplamiento magnético mutuo de flujo igual a cero.
2.3 RELACIONES MATEMÁTICAS DE LOS DEVANADOS dq (A UNA
VELOCIDAD ARBITRARIA ωd)
En la Fig. 2-4 se muestran las relaciones entre las cantidades del estator y las del rotor y sus
componentes en los devanados dq equivalentes, las cuales en combinación producen la
misma fmm que los devanados trifásicos originales.
Los vectores espaciales en un tiempo arbitrario t en la Fig. 2-4 se expresan sin el
superíndice “a” o “A”. La razón es que el eje de referencia sólo se necesita para expresarlos matemáticamente mediante números complejos.
En otras palabras, estos vectores espaciales en la Fig. 2-4 estarían en la misma posición, independientemente de la elección del eje de referencia. La posición relativa de is e se muestra arbitrariamente sólo para propósitos de definición, ya que en una máquina de inducción, el ángulo entre
r i
s
i e ir es muy grande, mayor a 145°.
De aquí en adelante se omitirá el superíndice “d” para los vectores espaciales que utilicen el eje d como referencia.
De la Fig. 2-4, se nota que en el tiempo t, el eje d se muestra a un ángulo θda . Por lo tanto,
= a j da
s s
i i e− θ (2-9)
Sustituyendo la ecuación 2-1 en la ecuación 2-9:
( 2 3) ( 4 3)
= jda + j da + j da
s a b c
i i e−θ i e− θ − π i e− θ − π (2-10)
Igualando las componentes real e imaginaria del lado derecho de la ecuación 2-10 con isd
e isq en la ecuación 2-4:
( )
( )
2 4
cos cos cos
3 3
2
3 2 4
sen sen sen
3 3
a
da da da
sd
b sq
da da da c
donde es la matriz de transformación para convertir las corrientes de los
devanados de las fases abc a las corrientes que corresponden a los devanados dq
equivalentes.
abc → dq
Este procedimiento de transformación se utiliza en el diagrama mostrado en la Fig. 2-5, y se emplea en la simulación del control vectorial mostrado en la Fig. 2-14.
1 is_dq
-sqrt(2/3)*(sin(u(4))*u(1)+sin(u(4)-2*pi/3)*u(2)+sin(u(4)-4*pi/3)*u(3)) sqrt(2/3)*(cos(u(4))*u(1)+cos(u(4)-2*pi/3)*u(2)+cos(u(4)-4*pi/3)*u(3))
4 theta_da
3 isc
2 isb
1 isa
Figura 2-5. Transformación de coordenadas abc → dq en Simulink® para las corrientes del estator.
La misma matriz de transformación relaciona los flujos y los voltajes del estator en los devanados trifásicos con los de los devanados equivalentes dq. En la Fig. 2-6 se muestra la transformación para los voltajes que se emplean en la simulación. Un procedimiento similar se sigue en el caso del rotor.
1 vs_dq
-sqrt(2/3)*(sin(u(4))*u(1)+sin(u(4)-2*pi/3)*u(2)+sin(u(4)-4*pi/3)*u(3)) sqrt(2/3)*(cos(u(4))*u(1)+cos(u(4)-2*pi/3)*u(2)+cos(u(4)-4*pi/3)*u(3))
4 theta_da
3 vsc
2 vsb
1 vsa
2.3.1 Relación de las variables de los devanados dq con las variables de los
devanados trifásicos
En el caso de un neutro aislado, donde todas las corrientes de fase suman cero en cualquier instante de tiempo, las variables de los devanados trifásicos abc se pueden calcular en términos de las variables de los devanados dq. En la ecuación 2-11 se puede agregar una fila en la parte inferior para representar la condición de que todas las corrientes de fase suman cero. Invirtiendo la matriz resultante y descartando la última columna cuya contribución es cero, se obtiene la relación deseada:
( )
( )
cos sen
2 4 4
cos + sen +
3 3 3
2 2
cos + sen +
3 3
da da
a
b da da
c da da dq abc i i i θ θ π π θ θ π π θ θ → ⎡ ⎤ ⎢ − ⎥ ⎢ ⎥ ⎡ ⎤ ⎢ ⎛ ⎞ ⎛ ⎞ ⎥ ⎢ ⎥ = ⎢ ⎜ ⎟ − ⎜ ⎟ ⎥ ⎢ ⎥ ⎝ ⎠ ⎝ ⎠ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎛ ⎞ ⎛ ⎞ ⎥ − ⎢ ⎜ ⎟ ⎜ ⎟ ⎥ ⎢ ⎝ ⎠ ⎝ ⎠ ⎥ ⎣ ⎦ sd sq i i ⎡ ⎤ ⎢ ⎥ ⎣ ⎦ (2-12)
donde es la matriz de transformación en dirección inversa (de dq a abc). Una
matriz similar de transformación se puede obtener para el caso del rotor, reemplazando
dq → abc
da
θ
con θdA.
3 isc 2 isb 1 isa sqrt(2/3)*(cos(u(3)+2*pi/3)*u(1)-sin(u(3)+2*pi/3)*u(2)) sqrt(2/3)*(cos(u(3)+4*pi/3)*u(1)-sin(u(3)+4*pi/3)*u(2)) sqrt(2/3)*(cos(u(3))*u(1)-sin(u(3))*u(2)) 3 theta_da 2 isq 1 isd
Figura 2-7. Transformación de coordenadas dq → abc en Simulink® para las corrientes del estator.
3 vsc
2 vsb
1 vsa
sqrt(2/3)*(cos(u(3)+2*pi/3)*u(1)-sin(u(3)+2*pi/3)*u(2)) sqrt(2/3)*(cos(u(3)+4*pi/3)*u(1)-sin(u(3)+4*pi/3)*u(2))
sqrt(2/3)*(cos(u(3))*u(1)-sin(u(3))*u(2))
3 theta_da
2 vsq
1 vsd
Figura 2-8. Transformación de coordenadas dq → abc en Simulink® para los voltajes del estator.
2.3.2 Flujos de los devanados dq en términos de sus corrientes
Se tiene un conjunto de cuatro devanados dq como se muestra en la Fig. 2-4. No hay
acoplamiento mutuo entre los devanados en el eje d y los del eje q. El flujo en cualquier devanado se debe al producido por su corriente propia y al flujo del otro devanado en el mismo eje.
En el devanado d del estator, por ejemplo, debido a isd , tanto el flujo de magnetización como el flujo disperso están presentes en este devanado. Sin embargo, debido a , sólo el flujo de magnetización está presente en este devanado (el flujo disperso no cruza el entrehierro). Empleando esta lógica, se obtienen las siguientes expresiones para el flujo en los cuatro devanados:
rd i
Para los devanados del estator:
sd L is sd L imrd
λ = + (2-13)
sq L is sq L im rq
λ = + (2-14)
donde Ls = LAs + Lm
rd L ir rd L im sd
λ = + (2-15)
rq L ir rq L im sq
λ = + (2-16)
donde Lr = LAr + Lm
2.3.3 Voltajes de los devanados dq
Las expresiones para los voltajes de los devanados dq, se toman de la referencia [2]
(ecuaciones 3-28 a 3-35 del texto). Para los devanados del estator:
sd s sd sd d sq
d
v R i
dtλ ω λ
= + − (2-17)
+
sq s sq sq d
d
v R i
dtλ ω λsd
= + (2-18)
donde d d
dt da
ω = θ . Las ecuaciones 2-17 y 2-18 se pueden expresar en forma vectorial de
la siguiente forma:
[ ] 0 1
+
1 0
sd sd sd
s d
sd
sq sq sq
Mr
v i d
R
v i dt sq
λ λ ω λ λ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ − ⎤⎡ ⎤ = + ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎥ (2-19)
Para los devanados del rotor:
rd r rd rd dA rq
d
v R i
dtλ ω λ
= + − (2-20)
+
rq r rq rq dA rd
d
v R i
dtλ ω λ
donde dA d dA
dt
ω = θ , es decir:
dA d m
ω = ω − ω (2-22)
m
ω se relaciona con ωmech, mediante la siguiente expresión:
(
)
2
m p mech
ω = ω (2-23)
Las ecuaciones 2-20 y 2-21 se pueden expresar en forma vectorial de la siguiente forma:
[ ] 0 1
+
1 0
rd rd rd rd
r dA
rq rq rq rq
Mr
v i d
R
v i dt
λ λ ω λ λ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ − ⎤⎡ ⎤ = + ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎥ ¨ (2-24)
2.3.4 Obtención de flujos teniendo corrientes y voltajes como entradas
Se pueden escribir las ecuaciones 2-19 y 2-24 en forma de ecuaciones de estado de la forma siguiente:
[ ] 0 1
1 0
sd sd sd
s d
sd
sq sq sq
Mr v i d R v i dt sq λ λ ω λ λ ⎡ ⎤ = ⎡ ⎤ − ⎡ ⎤ − ⎡ − ⎤⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎥ (2-25)
[ ] 0 1
1 0
rd rd rd rd
r dA
rq rq rq rq
Mr v i d R v i dt λ λ ω λ λ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ − ⎤⎡ ⎤ = − − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎣ ⎦
⎣ ⎦ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎥ (2-26)
[ ]
_ _ _ _
s dq s dq s s dq d s dq
d
v R i Mr
dt⎡⎣λ ⎤⎦ = ⎡⎣ ⎤⎦ − ⎣⎡ ⎤⎦ − ω ⎡⎣λ ⎤⎦ (2-27)
[ ]
_ _ _
r dq r dq r r dq dA r dq
d
v R i Mr
dt⎣⎡λ ⎤⎦ = ⎡⎣ ⎦⎤ − ⎣⎡ ⎤⎦ − ω ⎡⎣λ _ ⎤⎦ (2-28)
1
fl_s_dq [0 -1; 1 0]* u
1 s
Rs
3
Wd
2
is_dq 1
vs_dq
Figura 2-9. Diagrama a bloques en Sumulink® para representar la ecuación 2-27.
La ecuación 2-27 se emplea en la simulación del control mostrado en la Fig. 2-14 como parte de la representación del motor bajo la forma de diagrama de bloques como se muestra en la Fig. 2-9.
2.4 ELECCIÓN DEL VALOR DE LA VELOCIDAD ωd DE LOS DEVANADOS dq
2.5 PAR ELECTROMAGNÉTICO
En el devanado del rotor sobre el eje d, el par producido se debe al flujo producido por los devanados sobre el eje q [2]:
(
)
,
2 2
d rotor m sq r rq rd rq rd
rq p
T L i L i i
λ
λ
= + = p i (2-29)
En el devanado del rotor sobre el eje q, el par producido se debe al flujo producido por los devanados sobre el eje d [2]:
(
)
,
2 2
q rotor m sq r rq rq rd rq
rd p
T L i L i i
λ
λ
= − + = − p i
,
(2-30)
Por superposición, sumando el par actuando sobre el devanado del rotor en eje d al par actuando sobre el devanado del rotor en ele eje q, el par instantáneo está dado por la expresión:
,
em d rotor q rotor
T = T + T (2-31)
Sustituyendo las ecuaciones 2-29 y 2-30 en la ecuación 2-31 se obtiene que:
(
2
em rq rd rd rq
p
T = λ i − λ i
)
(2-32)Se puede expresar Tem en términos de inductancias como sigue:
(
2
em m sq rd sd rq
p
2.6 ELECTRODINÁMICA
La aceleración está determinada por la diferencia entre y (incluyendo la fricción), actuando sobre
em
T TL
eq
J . En términos de ωmech:
em L
mech
eq T d
dtω J
−
= T (2-34)
En el diagrama a bloques en la simulación del control mostrado en la Fig. 2-14 que corresponde a la ecuación 2-34 se muestra en la Fig. 2-10:
1
Wmech 1
s
Par de Carga 1/Jeq 1
Tem
Figura 2-10. Diagrama a bloques en Sumulink® para representar la ecuación 2-34.
2.7 CIRCUITOS EQUIVALENTES DE LOS EJES dq
Expresando las derivadas de los flujos en términos de inductancias, las ecuaciones 2-17 y 2-18 para los voltajes del estator quedan de la siguiente forma:
(
)
sd s sd d sq s sd m sd rd
d d
v R i L i L i i
dt dt
ω λ
= − + A + + (2-35)
(
+
)
sq s sq d sd s sq m sq r
d d
v R i L i L i i
dt dt
ω λ
= + A + + q (2-36)
(
0 = vrd R ir rd dA rq Lr d ird Lm d isd ird
dt dt
ω λ
= − + A + +
)
(2-37)(
0 = vrq R ir rq + dA rd Lr d irq Lm d isq irq
dt dt
ω λ
= + A + +
)
(2-38)Para cada eje, las ecuaciones para los devanados del estator y del rotor se combinan para
obtener los circuitos equivalentes dq, que se muestran en las Figs. 2-11a y 2-11b.
Empleando la ecuación 2-17 se pueden marcar los puntos a través de los cuales se presenta el voltaje dλsd dt en la Fig. 2-11a. De forma similar, empleando las ecuaciones 2-18, 2-20 y 2-21 respectivamente, se pueden marcar en las Figs. 2-11a y 2-11b los puntos a través de los cuales se presentan los voltajes dλsq dt, dλrd dt y dλrq dt.
Figura 2-11. Circuitos equivalentes de los devanados dq. (a) Eje d; (b) Eje q.
2.8 MODELO DEL MOTOR CON λr ALINEADO CON EL EJE d
Alineando el eje d (común tanto al estator como al rotor), con λr = λˆr ej0, de tal forma que:
= 0 rq
λ (2-39)