ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
“IMPLEMENTACIÓN DE UN SISTEMA DE
COMUNICACIÓN INALÁMBRICA
PARA UN ROBOT”
TESIS
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTAN:
ROBERTO CASTELLANOS VANEGAS
PEDRO ADAIR MENDIZÁBAL ROJAS
ILZE VELÁZQUEZ CALZONCIT
ASESORES:
M en C. Alberto Luviano Juárez
M. en C. Pedro Gustavo Magaña del Río
Dedicatorias
A mis padres Esther y Amaro
, gracias por llenarme de valores, consejos, paciencia y
cariño, parte que prometo sembrar en el corazón de mis seres queridos.
A mis hermanos
, gracias por sacrificar parte de su vida, por mostrarme la fuerza y las caras
que tiene la vida, porque de todos y cada uno de ustedes tome una virtud.
A mi familia, amigos y novia
, gracias por haberme abrigado con su ánimo, alegrías y
apoyo, momentos que siempre llevaré en el corazón.
A Daniel
, que aunque no estás con nosotros, te llevamos en el corazón.
Dedicatorias
A madre María Leticia
y a mi abuelita Hipólita porque con
su comprensión, apoyo y ayuda en momentos buenos y malos me
enseñaron a encarar las adversidades sin perder nunca la dignidad
ni fallecer en el intento. Me han dado todo lo que soy como persona,
mis valores, mis principios, mi perseverancia y mi empeño, y todo ello
con gran amor.
Mamá Lety y Mamá Pola…
las amo
¡Muchas Gracias!
A Anahí, mi hermana
que ha sido siempre un gran
apoyo como amiga y que como hermana es la mejor.
Porque fuiste un gran apoyo durante mi formación
profesional y humana; porque tus consejos y largas pláticas me
ayudaron en momentos muy difíciles. Gracias Anahí por
tu tiempo y tolerancia. Hermana te quiero mucho. ¡Gracias
por ser la mejor!.
Dedicatorias
A Alma y Pedro
mis padres. Gracias por ser seres
maravillosos, por el apoyo, cariño y comprensión. Agradezco los
sabios consejos que en el momento exacto han sabido darme para no
dejarme caer y enfrentar los momentos difíciles, por guiar mi camino
y estar siempre junto a mí, sus palabras y consejos son lecciones que me
acompañarán toda la vida y sobre todo por el amor tan grande que
me dan.
Gracias
por confiar en mí y darme la oportunidad de
culminar esta etapa de mi vida.
Los amo
A mis hermanos
Yesica, Gabriela y Alejandro
porque
con su amor me han enseñado a salir adelante, gracias por
apoyarme en todo momento, este logro también es suyo, me siento
muy orgulloso de tenerlos como hermanos. Gracias por creer en
mí y también compartir este momento tan importante en mi vida.
Los quiero
A tí,
por permitirme formar parte de tu vida gracias por tu amor y por ser el ser humano con los mejores
sentimientos que he conocido, por tu compresión, por estar conmigo en los malos y buenos momentos.
Gracias por acompañarme todo este tiempo
.
Agradecimientos
Las palabras que se presentan son la suma de las luchas que las han moldeado, consecuencia de sus consejos,
resultado de su confianza y amor regalado; todos ustedes me presentaron la entrada hacia un camino el
cual juntos cruzamos, me ayudaron, me levantaron e iluminaron cuando yo no veía.
Gracias, porque ahora soy más fuerte, porque permanezco anclado al mundo del conocimiento, porque que
su respeto e intelecto compartido formo la integridad de esta persona.
A mis profesores y compañeros
de la carrera, gracias por compartir su conocimiento, conocimiento que
perseveraré por multiplicarlo.
A mis asesores Dr. Alberto Luviano Juárez y M. en C. Pedro Gustavo Magaña
del Río
, gracias por la orientación, seguimiento, supervisión y colaboración en el contenido del presente
trabajo, ayuda y motivación invaluable.
A mis compañeros de proyecto
Pedro Adair e Ilze
, gracias por soportar la presión que juntos
compartimos, por haber permanecido hasta llegar a la victoria.
A todos ustedes, les estaré siempre inmensamente agradecido.
Agradecimientos
Son muchas las personas especiales a las que me gustaría agradecer su amor, amistad, apoyo, ánimo y
compañía en las diferentes etapas de mi vida. Algunas están aquí conmigo y otras están en mis recuerdos,
quiero darle las gracias por formar parte de mí, por todo lo que me han brindado y por todas sus bendiciones.
A mis amigos
porque nos apoyamos mutuamente en
nuestra formación profesional y que hasta ahora siguen y
seguirán siendo mis amigos:
Paola
Vázquez,
Diana
Nava,
Jonathan
Ledesma,
Elizabeth
Sánchez,
Roberto
Castellanos,
Irving
Bustos,
Eduardo
Kejel y
Marco
Ortega por ser los mejores compañeros que
uno puede esperar y porque lo difícil se transformó en sencillo
gracias a su compañía.
Un especial agradecimiento a personas que admiro por su
inteligencia, sus conocimientos y su gran humildad, Dr. Alberto
Luviano Juárez y al M. en C. Pedro GustavoMagaña del
Río por la paciencia, los consejos, el apoyo y la dirección de este
trabajo, a quien les debo que este trabajo haya sido posible realizarlo.
Gracias por ayudarme a alcanzar este sueño.
A tí
porque me has brindado todo tu cariño, apoyo y comprensión en los momentos buenos y malos,
todo esto sin esperar nada a cambio.
Gracias
por todos tus consejos e infinita paciencia y por permitirme
estar a tu lado formando parte de tu vida y de tu familia.
Agradecimientos
Me gustaría que estas líneas sirvieran para expresar mi más profundo y sincero
agradecimiento a
todas
aquellas personas que me han guiado y acompañado a lo largo de mi carrera.
,
A mis asesores,
Dr. Alberto Luviano Juárez, M. en C. Pedro Gustavo Magaña del Río,
A mis compañeros de proyecto,
Ilze Velázquez Calzoncit y Roberto Castellanos Vanegas
,
porque con su ayuda han colaborado en la realización del presente trabajo, a mis amigos
Irving,
Eduardo
y a mi primo
Christian
sin ustedes no hubiera sido posible.
Gracias
“
IMPLEMENTACIÓN
DE UN SISTEMA DE
COMUNICACIÓN
INALAMBRICA
O B J E T I V O
INDÍCE
INTRODUCCIÓN
. ... XIIIANTECEDENTES. ... XV
CAPÍTULO 1
PANORAMA DE LAS COMUNICACIONES INALÁMBRICAS. ... 18
1.- Introducción. ... 19
1.1 Automatización ... 19
1.2 Robots autónomos. ... 20
1.3 Bluetooth. ... 21
1.3.1 Funcionamiento. ... 23
1.3.2 Protocolos Bluetooth. ... 28
1.4 WPAN... 29
1.5 Estructura del robot BoeBot. ... 29
1.6 ¿Qué es MATLAB? ... 31
CAPÍTULO 2 ESTABLECIENDO LA COMUNICACIÓN CON EL ROBOT BoeBot ... 32
Preliminares ... 33
2.1 Conexión de la tarjeta de educación con la eb500 ... 34
2.2 Programación de recepción en el microcontrolador ... 35
2.3 Asignación de puertos COM. ... 40
2.4 Plataforma de transmisión en MATLAB. ... 43
2.5 Diagrama a bloques de la comunicación. ... 47
CAPÍTULO 3 INTERFAZ GRAFICA ... 48
Introducción. ... 49
3.1 GUIDE. ... 49
3.1.1 Propiedades de GUIDE. ... 52
3.1.2 Propiedades de los elementos. ... 52
3.2 GUI del prototipo. ... 55
3.2.1 Elementos de Texto Estático (Static Text). ... 56
3.2.2 Inserción de imágenes (Axes). ... 56
3.2.3 Elementos tipo Push Button. ... 57
3.3 Estructura final del prototipo ... 60
CAPÍTULO 4
PRUEBAS Y RESULTADOS ... 62
Introducción. ... 63
4.1 Alcance Promedio del Robot BoeBot. ... 63
4.2 Eficiencia de comunicación en distintos entornos de ... 64
operación... 64
4.3 Eficiencia de la comunicación con dispositivos celulares ... 69
operando a la misma frecuencia. ... 69
CAPÍTULO 5 APLICACIÓN ... 71
Introducción. ... 72
5.1 Aplicación del prototipo. ... 72
5.2 GUI de la aplicación. ... 73
CONCLUSIÓNES ... 77
RECOMENDACIONES ... 79
ANEXOS ... 81
GLOSARIO ... 88
Introducción.
Las comunicaciones desde sus inicios han sido pilar fundamental en el desarrollo político, económico y social de un país; el avance que éstas presentan, combinando diferentes ciencias como lo es la electrónica, la robótica, el control y automatización, la computación, entre otras, ha permitido alcanzar esquemas que antes solo podían ser parte de nuestra imaginación. Se ha traspasado una barrera que nos ha permitido tener un mejor estilo de vida y, sobre todo ha creado nuevas ideas sobre posibles soluciones a los problemas que día a día se presentan en la vida cotidiana. La transformación de la tecnología analógica a la digital y la reducción de los sistemas a diminutos tamaños, es muestra clave de las grandes posibilidades que el hombre tiene para modificar a su beneficio el entorno donde se encuentra.
Con el desarrollo de las tecnologías inalámbricas, se ha conseguido tener mejores expectativas sobre la autonomía de los sistemas a grandes distancias, y con esto, eliminado un cableado que bien podría ser una carga económica en los sistemas de comunicaciones. Sin dejar de mencionar los apoyos cibernéticos y tecnológicos que han dejado al libre albedrío su uso y aplicación para cada una de las mentes inquietas, así como para aquellos que quieran más que solo un servicio o información. Así pues, las comunicaciones inalámbricas, a cualquier escala, han dejado un campo que se puede ampliar en muchas más aplicaciones y a muchas más tareas.
Por otra parte, actualmente dentro de las comunicaciones inalámbricas, la de mayor fuerza es la telefonía celular, es lo que mueve las inquietudes de la gente, de la que se espera tener un poco más cada día, la que poco a poco se introduce en diferentes campos y de la que se han generado muchas más tecnologías para que sean parte de este tipo de comunicación. Es de aquí de donde se parte, de la búsqueda de dispositivos de los que aun se considera no se han explotado todas sus características y así poder sacar más provecho en algunas otras aplicaciones.
Antecedentes.
La comunicación siempre ha sido campo de estudio e innovación en la vida de todos los seres humanos, pues siempre se tiene la necesidad de comunicar o de obtener algún tipo de información, ésta puede ser de un lugar, de una persona o de alguna otra fuente que nos provoque la necesidad de comunicarnos. Es así como diferentes sistemas de comunicación y tecnologías han sido diseñados para facilitar este intercambio de datos, pues forma parte de un desarrollo tecnológico actual el conseguir información a cantidades mayores, con una mejor calidad y una mayor velocidad.
Con este avance tecnológico en el que se tienen a la mano todos los recursos para poder ser utilizados, surgen nuevas inquietudes, nuevos problemas que sobrepasan la simple necesidad de información que se tenia, por una investigación más detallada sobre los espacios y los ecosistemas a los que el hombre no puede acceder con gran facilidad. Este nuevo desarrollo permite además, que unas disciplinas funcionen como soportes para otras disciplinas, y así poder hacer más completa esta nueva tecnología.
Estos nuevos sistemas de comunicación más completos, actúan en diferentes campos y aplicaciones como un detonante para crear nuevas cuestiones, pues el usuario siempre demanda un poco mas de calidad en el servicio; lo que ha generado nuevos medios de comunicación que permiten transmitir una mayor cantidad de información a una mejor velocidad y con un buen grado de confiabilidad, usando medios de comunicación como la fibra óptica y los sistemas inalámbricos, destacando de esta última, la flexibilidad en su movilidad, su bajo costo y la facilidad que se tiene para acceder a su servicio.
La transformación que se presenta de comunicaciones alámbricas a comunicaciones inalámbricas, provoca que los usuarios quieran un control a distancia sobre sus componentes electrónicos, genera una eliminación a la dependencia del cableado, que en ocasiones limita al usuario a trabajar a una cierta área o a un solo alcance, sin dejar de contemplar la economía que representa ante sus ingresos el utilizar otro tipo de tecnología.
Estas dificultades de dependencia a un cableado que tienen algunos sistemas de comunicación representan, además, una dificultad para que puedan realizar un completo funcionamiento, es por eso que surge la idea de generar una plataforma inalámbrica que pueda ser utilizada por algún componente que represente utilidad, en este caso un robot móvil, estableciendo así un nuevo camino en el que empiecen a ser utilizadas este tipo de tecnologías sobre diferentes equipos electrónicos.
C
APÍTULO 1
|
“
PANORAMA DE LAS
COMUNICACIONES
1.- Introducción.
A lo largo del tiempo, las redes de comunicaciones se han clasificado según su extensión en LAN, MAN, GAN, BAN, SAN, WAN Y PAN. Las primeras aplicaciones de las redes de radio se restringen a entornos WAN en los que se empleaba un enlace radio electrónico para interconectar dos o más puntos entre si. Sin embargo conforme avanzó la tecnología y a medida que los usuarios fueron demandando servicios más interactivos se fue poniendo en manifiesto la necesidad de nuevas redes con mayor ancho de banda y mejor capacidad bidireccional. Es de aquí de donde salen las redes de telefonía móvil, que en primer momento, ofrecían comunicaciones de voz (GSM) y, tras la explosión de Internet, también permiten las
comunicaciones móviles de datos (UMTS). Las numerosas ventajas de las
comunicaciones inalámbricas pronto hicieron que se planteara su utilización en entornos corporativos reducidos, pues ya existían aplicaciones para empresas como las redes VSAT sobre satélite o el acceso a Internet a trabes de un enlace LMDS. Se trataba de conjugar aspectos como el gran ancho de banda de las redes locales, la libertad de movimientos y la flexibilidad típica e las redes móviles. Pronto se obtuvo una respuesta: las WLAN.
El estándar IEEE 802.11b, mas conocido como WiFi, al principio no tuvo demasiado éxito debido a aspectos económicos y a algunas cuestiones técnicas que quedaban por resolver. Sin embargo, con el tiempo, ha formado parte de la cotidianidad de los usuarios y ha alcanzado una expansión que aun no tiene límites.
Pero las comunicaciones sin hilos también tienen aplicación a distancias más cortas, dando lugar a las redes WPAN (wireless PAN). Nacieron con el propósito de
conseguir un puesto de trabajo o escritorio en el que no existieran cables, es decir, la conexión de periféricos a través de pequeños enlaces vía radio. Sin embargo, hoy en día existen aplicaciones realmente sorprendentes. El mayor exponente de las redes WPAN es la tecnología Bluetooth, aunque existen otras, como son IrDA, Homero o WiMedia. También Zigbee se utiliza en estos entornos, aunque está más orientada a aplicaciones de menor tasa binaria (banda estrecha).
Las redes inalámbricas se clasifican dependiendo de las particularidades que cada una tiene, pues es lo que define su uso en un entorno determinado. Actualmente existen versiones muy potentes de cada una de las diferentes tecnologías inalámbricas, además de algunas otras que empiezan aparecer en el mercado como lo es LTE y WIMAX.
1.1 Automatización
El grado de automatización de un sistema es extremadamente variable según la naturaleza del proceso, la complejidad que requiera y los objetivos asignados al proyecto.
Actualmente se dispone de numerosas herramientas para realizar el órgano de mando de un sistema, que se agrupan habitualmente en dos categorías fundamentales: las soluciones cableadas y las soluciones programadas con mando a distancia. La electricidad y la electrónica normalmente utilizan las soluciones cableadas que debido a su estructura tienen un grado de complejidad mayor, aun considerando la reducción a circuitos integrados, estas son objeto de las inversiones e investigación de sistemas de mando, en el que se pretende que todos estos sistemas pertenezcan al campo informático que ofrece una alternativa tecnológica automatizada y le abre nuevas posibilidades al tratamiento y memorización de la información ( a las comunicaciones).
Este proceso por el cual pasan diferentes maquinas, conjunto de maquinas o equipo industrial, tiene la finalidad de competir siempre económicamente, pues a su vez impone a la industria, a la necesidad de producir en calidad y en cantidad para responder a la demanda de la sociedad. Pertenece además, a un desarrollo en el que es de gran importancia disminuir los costos, agilizar la producción y mejorar las condiciones y herramientas de trabajo.
1.2 Robots autónomos.
El auge que se presenta en el desarrollo de robots móviles, tiene su fundamento básico en el incremento de la autonomía, limitando al máximo la intervención humana.
Desde un punto de vista autónomo los robots tienen como precedentes los
dispositivos electro- mecánicos, tales como los “micro-mouse”, creados en los años
treinta, para desarrollar funciones inteligentes tales como descubrir caminos en laberintos, entre otro de los mas sobresalientes , esta la tortuga de Walter, presentada en 1948, que podía reaccionar ante presencia de obstáculos , subir pendientes y, cuando la alimentación comenzaba a ser insuficiente, dirigirse hacia una posición de recarga.
autonomía, pues aparece un desarrollo computacional y de nuevos censores, además de mecanismos y sistemas de control, los cuales permiten la fabricación de robots con una panorámica más amplia, tanto para interiores como para navegación exterior, cuya principal característica es que en estos se incluyen tareas de planificaron, percepción y de control. Es aquí, de donde se comienzan a crear robots, con sistemas más complejos y con un sin número de características practicas, geométricas, cinemáticas, dinámicas, todo terreno, de búsqueda, de mayor velocidad, de movimientos concretos, etc. Cuya principal finalidad es realizar tareas que implican una mayor precisión, seguridad de funcionamiento, inmunidad, y características que los hacen sistemas autónomos a grandes distancias.
Las mayores dificultades radican en las limitaciones del hombre, en la capacidad de procesamiento numérico y precisión y, sobre todo, en el acoplamiento y coordinación entre el hombre y el robot. En algunas aplicaciones, el retraso de transmisión de información juega un papel importante y su consideración resulta fundamental, en aplicaciones tales como las comunicaciones.
El diseño de una interfaz persona- maquina suele ser crítico, pues la investigación actual se dirige a hacer recaer en el operador únicamente las tareas que requieren toma de decisiones en función de información sensorial, no obstante, existen limitaciones por el ancho de banda de transmisión y, eventualmente, por la complejidad de la tarea del operador.
1.3 Bluetooth.
Bluetooth (estándar IEEE 802.15.1) considerado un enlace radio de corto enlace WPAN, sin necesidad de visión directa entre los dispositivos implicados, que opera en la banda libre ISM de los 2.4 Ghz.
Empieza a concebirse en Ericsson Mobile Communications AB (Suecia) en 1994 como el efecto colateral de un proyecto sobre enlaces inalámbricos para la interconexión entre teléfonos móviles y otros accesorios con el objetivo de eliminar cables entre aparatos, además de conseguir un bajo costo y consumo de energía (de 1mW a100 mW dependiendo del alcance). El estudio partía de un largo proyecto que investigaba sobre unos multi comunicadores conectados a una red celular, hasta que se llegó a un enlace de radio de corto alcance llamado “MC link”. Con el avance del proyecto quedó claro que este tipo de enlace podía ser utilizado en un gran número de aplicaciones, pues poseía como ventaja principal el hecho de basarse en un chip de radio relativamente económico.
le da el nombre de “Bluetooth” y aparece el grupo de interés en esta tecnología llamado SIG (Special Interest Group) en el que aparecían Ericsson, Toshiba, IBM e Intel como empresas promotoras de la tecnología; más tarde se sumaron otros promotores como 3Com, Lucent, Microsoft y Motorota generándose el consorcio Bluetooth.
La idea era lograr un conjunto adecuado de áreas de negocio, ya que se hallaban en el grupo dos líderes del mercado de las telecomunicaciones, dos del mercado de las PCs portátiles y un líder de la fabricación de chips.
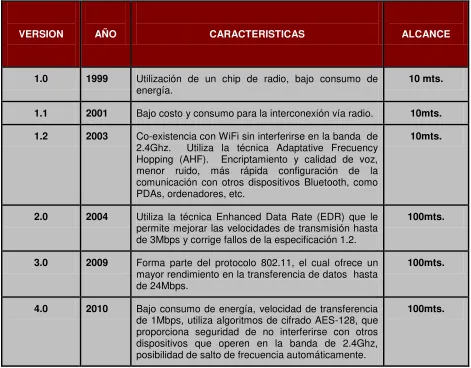
La tabla 1.1 resume la evolución de la tecnología Bluetooth, mostrando características y alcance de las diferentes versiones que aparecieron, desde la primera versión en el año 1999 hasta la última en el año 2010.
VERSION AÑO CARACTERISTICAS ALCANCE
1.0 1999 Utilización de un chip de radio, bajo consumo de energía.
10 mts.
1.1 2001 Bajo costo y consumo para la interconexión vía radio. 10mts. 1.2 2003 Co-existencia con WiFi sin interferirse en la banda de
2.4Ghz. Utiliza la técnica Adaptative Frecuency Hopping (AHF). Encriptamiento y calidad de voz, menor ruido, más rápida configuración de la comunicación con otros dispositivos Bluetooth, como PDAs, ordenadores, etc.
10mts.
2.0 2004 Utiliza la técnica Enhanced Data Rate (EDR) que le permite mejorar las velocidades de transmisión hasta de 3Mbps y corrige fallos de la especificación 1.2.
100mts.
3.0 2009 Forma parte del protocolo 802.11, el cual ofrece un mayor rendimiento en la transferencia de datos hasta de 24Mbps.
100mts.
4.0 2010 Bajo consumo de energía, velocidad de transferencia de 1Mbps, utiliza algoritmos de cifrado AES-128, que proporciona seguridad de no interferirse con otros dispositivos que operen en la banda de 2.4Ghz, posibilidad de salto de frecuencia automáticamente.
[image:22.612.78.549.307.675.2]100mts.
La versión 4.0 de Bluetooth, no sólo servirá para teléfonos móviles, sino que se puede incorporar a calculadoras, relojes, mandos a distancia e infinidad de otros dispositivos de bajo consumo. Sólo es necesario que funcionen con una pila de botón, cuya vida puede ser de varios años.
El iPhone 4S es el primero de una ola de nuevos teléfonos con Bluetooth v4.0 el cual
fue presentado en agosto del 2011. A finales de 2012, prácticamente todos los nuevos teléfonos inteligentes incluirán esta tecnología, lo que les permitirá conectarse con los miles de millones de dispositivos Bluetooth en el mercado con
una calidad muy mejorada.
1.3.1 Funcionamiento.
El funcionamiento básico de Bluetooth es una continuación de la tecnología básica
que ocupan las comunicaciones inalámbricas, conocida como “spread Spectrum”
[image:23.612.117.512.433.650.2](espectro disperso) y frecuency hopping (salto de frecuencia) o espectro ensanchado por salto en frecuencia. En la figura 1.1 se muestra el sistema de salto de frecuencia, en el cual, se divide la banda de frecuencia en varios canales de salto, donde los transceptores durante la conexión, van cambiando de un canal de salto a otro de manera pseudo-aleatoria buscando una parte no utilizada del espectro, así este sistema puede evitar las múltiples interferencias y se consigue que el ancho de banda instantáneo sea muy pequeño.
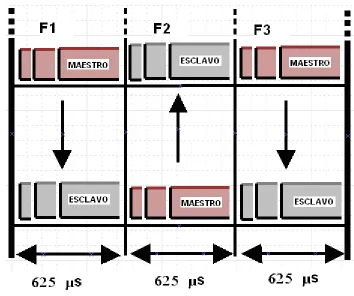
La figura 1.2 muestra como el canal queda dividido en intervalos de 625 µs,
llamados “slots”, donde cada salto en frecuencia es ocupado por un slot y tiene una
frecuencia de 1600 saltos por segundo. En el canal, la información se intercambia por medio de paquetes, un paquete puede ocupar un slot para la emisión y otro para la recepción, estos pueden ser usados alternativamente emulando una transmisión en forma full duplex, dando lugar a un esquema de tipo TDD (time division duplex).
[image:24.612.132.486.231.527.2].
Figura 1.2 Canal.
Por otro lado, la conmutación de paquetes puede ser asíncrona o síncrona. Tres canales de datos síncronos (voz), o un canal de datos síncrono y uno asíncrono, pueden ser soportados en un solo canal. Cada canal de voz puede soportar una tasa de transferencia de 64 kb/s en cada sentido, la cual es suficientemente adecuada para la transmisión de voz.
Un canal asíncrono puede transmitir como mucho 721 kb/s en una dirección y 56 kb/s en la dirección opuesta, sin embargo, para una conexión síncrona es posible soportar 432,6 kb/s en ambas direcciones si el enlace es simétrico.
Figura 1.3 Paquete.
Bluetooth soporta tanto comunicaciones punto a punto como punto a multipunto está basado en el concepto de piconet, un concepto genérico en las redes de área personal que se refiere a la capacidad de varios equipos para configurarse como una red; de una forma más estricta, la piconet se puede definir como la red de corto alcance con capacidad de hasta 8 dispositivos que comparten un canal, es decir, que funcionan de forma síncrona y siguiendo la misma frecuencia de hopping, es decir sincronizados en tiempo como en frecuencia.
Dentro de una piconet, existen diferentes medios de interacción entre los dispositivos Bluetooth. El modo más simple es la conexión punto a punto, mostrado en la figura 1.4, en la que únicamente hay dos extremos implicados; uno de ellos recibe el nombre de maestro y el otro el de esclavo. La otra variedad es la conexión punto a multipunto mostrado en la figura 1.5, donde múltiples dispositivos esclavos (hasta un máximo de 7) se conectan a un maestro.
genera entre las demás unidades, donde estas actúan como esclavas, enviando y recibiendo señales hacia el maestro
Figura 1.4 Punto a punto. Figura 1.5 Punto a multipunto.
En realidad, es posible que dentro de una misma piconet haya más de 7 esclavos conectados a un maestro, pero únicamente 7 de ellos podrán estar activos simultáneamente; el resto se dice que están aparcados (parked). Este tipo de
dispositivos permanece sincronizado, en todo momento, con el maestro, de manera que en cualquier momento pueda entrar en funcionamiento.
Figura 1.6 Picored.
A cada uno de los esclavos se le asigna un numero de 3 bits que recibe el nombre de
dirección es de 8 bits y se denomina PMA (parked member adress). Por tanto podrá
haber hasta 256 esclavos aparcados.
El solapamiento entre las áreas de cobertura de dos piconet cercanas da lugar a una
scatternet (ver figura 1.7). Cuando esto ocurre, los esclavos de una piconet pueden
actuar como maestros o como esclavos de la otra mediante un esquema TDM de multiplexaje por división en el tiempo. Cada una de las piconet opera con una secuencia de salto distinta.
Figura 1.7 Esquema de una scatternet.
En cuanto a interferencias con otros dispositivos, hay que tener cuidado con los que operan en la misma banda ya que se pueden interferir unos a otros.
1.3.2 Protocolos Bluetooth.
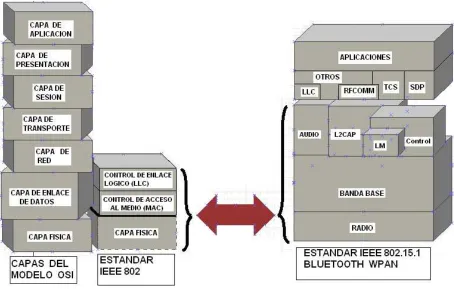
[image:28.612.87.541.225.514.2]La figura 1.8 muestra la pila de protocolos Bluetooth formada por una serie de niveles funcionales, que en comparación con el modelo OSI, ubican su trabajo en los dos primeras capas, la capa de enlace de datos y la capa física, cumpliendo con la referencia del estándar 802 publicado por la IEEE sobre redes de área local.
Figura 1.8 Protocolos OSI Y Bluetooth.
alguna estación asociada y la conversión de estas a una trama de bits que se transmite hacia la MAC, interacción entre capas adyacentes.
Sobre esta capa se sitúa el de la banda base (baseband), encargado de las tareas
de bajo nivel para lo que define un controlador de enlace (LC, link controller). Un
dispositivo Bluetooth genérico se compone de un modulo de radio, un modulo de control de enlace, y un modulo para la gestión de enlace y de la entrada salida.
1.4 WPAN
En el ámbito de redes residenciales compiten diferentes tecnologías, cada una de ellas adecuadas para un tipo determinado de red o de aplicación.
De todas estas tecnologías, las LAN son las que mayor distancia soportan, seguidas de las WLAN. En cuanto a ancho de banda, las de mejores prestaciones son las PAN. Las PAN y WPAN cubren distancias muy cortas y suelen complementar a las tecnologías LAN y WLAN. La conectividad en distancias muy cortas con tecnología radio o WPAN no compite en estos momentos, con el ámbito de las WLAN, pues cada una de ellas tiene claramente especificado su ámbito de aplicación y sus propias características. Las WPAN, al igual que las WLAN, funcionan en la banda de los 2.4 o 5 GHz.
Para el campo de redes WPAN, Bluetooth es la tecnología ideal por precio y prestaciones. También esta tecnología es una buena alternativa para controlar aplicaciones con el celular como mandos a distancia universales para todos los dispositivos del hogar e intercambiar datos entre dispositivos en forma rápida y sencilla.
1.5 Estructura del robot BoeBot.
BoeBot es un sistema robótico que funciona mediante programación amigable, la plataforma que ofrece será la base para poder tener control sobre sus características y funciones, que puede ofrecer diferentes utilidades, dependiendo de la aplicación en que se quiera utilizar.
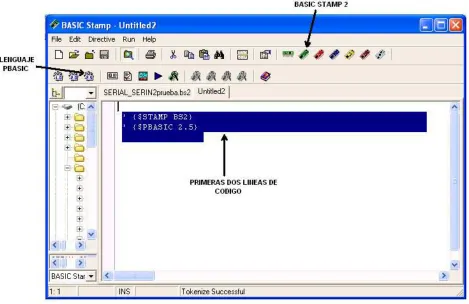
Este sistema está constituido por el microcontrolador “Basic Stamp 2”, el cual se presenta en la figura 1.9. Esta pequeña computadora va montada sobre una base
que se encuentra en lo que se llama “Board of Education”, a la cual debemos el
Figura 1.9 Microcontrolador Basic Stamp 2
El lenguaje de programación que utiliza es Pbasic, software libre, semejante al lenguaje C++, pero con características que lo diferencian y lo hacen un entorno ampliamente practico, ubicando al sistema en instrucciones muy necesarias y especificas.
Una de las características más sobresalientes en cuanto a la programación, es que este dispositivo cuenta con una arquitectura alámbrica, que limita su movilidad y flexibilidad, haciéndolo un dispositivo altamente dependiente al cableado.
La “Tarjeta de educación” se conforma por diferentes componentes, de los cuales solo se menciona la parte más importante.
La interfaz de voltaje, que permite conectar un grupo de tres baterías de 3 volts o una de 9v, y que suministra el voltaje necesario para todo el sistema, una interfaz cable serial, encargada del tráfico de los datos hacia la computadora y la que permite programar el microcontrolador Basic Stamp 2, este microcontrolador se coloca como se muestra en la figura 1.10, una tarjeta protoboard donde es posible realizar diversos circuitos para complementar algún proyecto especifico y por último un módulo de aplicación, que en nuestro caso es de suma importancia, pues será utilizado por una tarjeta de Bluetooth, modelo comercial eb500 fabricada por la
compañía “PARALLAX será utilizada para establecer el sistema de comunicación inalámbrico que será explicado en el capítulo 2.
Algunos otros componentes que conforman la estructura del robot BoeBot son los servomotores, que al igual que el protoboard y el modulo de aplicación, ya tiene puertos asignados para su aplicación.
[image:31.612.133.492.249.469.2]Es importante mencionar que este sistema robótico, fue diseñado para propósitos de corto alcance, al cual solamente se le pueden agregar nuevas características y buscar nuevas aplicaciones, pues ya está constituido en toda su estructura para solamente ser utilizado y adaptado a nuevos campos de acción, integrando este sistema a las nuevas tecnologías.
Figura 1.10 Tarjeta de educación.
1.6 ¿Qué es MATLAB?
MATLAB es el nombre abreviado de “MATrix LABoratory”. MATLAB es un programa
C
APÍTULO 2
|
“
ESTABLECIENDO LA
COMUNICACIÓN CON EL
Preliminares
Como se mencionó en el capítulo anterior, la plataforma de programación utilizada en el sistema robótico es Pbasic, parte fundamental en el sistema de comunicación, puesto que es la herramienta que permite configurar cada uno de los puertos en el microcontrolador, y así poder asociar estos puertos a una tarjeta de comunicación inalámbrica, que será un componente importante en el sistema de comunicación.
Debido a que el entorno de comunicación es de forma inalámbrica, es indispensable tomar apoyo de herramientas más sustentables que faciliten agregar aun más aplicaciones al sistema, además de que éstas respeten siempre la economía que tomamos como objetivo al principio de este fascículo.
Se utiliza Bluetooth, ya que es una de las tecnologías que permite explotar sus características, además del bajo costo y consumo de energía que esta tecnología requiere, creando así, una base sobre comunicación abierta para esta tecnología que pueda ser utilizada sobre cualquier otro tipo de sistema en una forma útil, fácil y económica. Además se toma la utilidad del entorno de programación MATLAB, ya que es uno de los programas más completos pues permite agregar más aplicaciones a futuro a nuestro sistema de comunicación, representando una magnífica herramienta para aplicaciones técnicas y aumentando significativamente la productividad de cualquier proyecto. La tarjeta Bluetooth eb500 mostrada en la figura 2.1, sirve poder establecer comunicación inalámbrica hasta alguna computadora, a numerosas velocidades y puede ser adaptada a diferentes microcontroladores, esta tarjeta puede ser programada en el microcontrolador Basic Stamp 2, asociándola a sus puertos y así poder transmitir datos seriales en formato carácter.
2.1 Conexión de la tarjeta de educación con la eb500
[image:34.612.221.414.240.434.2]La conexión entre la tarjeta de educación y la tarjeta Bluetooth eb500 se realiza como se muestra en la figura 2.2, configurando en la programación los puertos correspondientes para la transmisión a la tarjeta Bluetooth, en este caso como se explica en la parte de la programación, se utiliza el puerto cero para la transmisión.
Figura 2.2 Conexión de la eb500 sobre la tarjeta de educación.
Esta parte del ensamble en el sistema robótico, es la que nos permite establecer un control a distancia de todo el sistema, incluidos los motores que tiene agregados el robot para su movilidad. Es importante que la computadora que estemos utilizando tenga una interfaz Bluetooth, o en su defecto conectar un adaptador USB Bluetooth a ella, para poder establecer la comunicación. La importancia que representa el buen funcionamiento de todos estos elementos, desde la computadora hasta la eb500, es la base para poder establecer un buen sistema de comunicación entre el robot BoeBot y la computadora.
2.2 Programación de recepción en el microcontrolador
La programación que corresponde a la parte del microcontrolador, es la parte correspondiente al receptor y está conformada por una asociación de puertos con la tarjeta de Bluetooth. Para poder programar el microcontrolador, es necesario conectarlo por medio de un cable serial a la computadora. Una vez comprobada la correcta conexión del microcontrolador a la computadora, el procedimiento para programar las instrucciones de la comunicación en el microcontrolador Basic Stamp, es el siguiente:
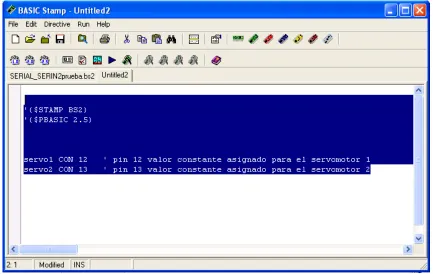
1.- La pantalla principal del programa Basic Stamp se muestra en la figura 2.3, a esta
[image:35.612.61.530.364.668.2]la componen un conjunto de barras de herramientas, en las que se encuentran las opciones para elegir el tipo de procesador que se está utilizando y la versión del lenguaje de programación, pues existen diferentes versiones y lenguajes del microcontrolador, en esta ocasión se utiliza la versión Basic Stamp 2 y el lenguaje de programación es Pbasic 2.5. Es importante realizar esta elección al comenzar cualquier programa.
2.- Como cada uno de los motores tiene un puerto asignado al microcontrolador, entonces es indispensable agregar dos variables de salida para estos elementos de tipo constante,
[image:36.612.110.543.186.460.2]pues aquí llega la información una vez recibida (ver figura 2.4).
Figura 2.4 Indicación de variables para los servomotores.
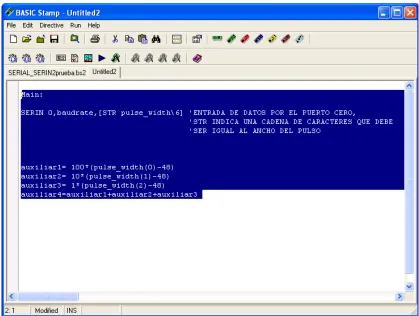
3.- En todo sistema de comunicación es necesario indicar la velocidad de transmisión a la que se quiere trabajar, para esto el microcontrolador puede enviar o recibir datos serial asíncrono a diferentes velocidades. Aquí se define una variable indicando la velocidad para recibir a 9600 bps, correspondiente al número 84 dentro de la configuración de formatos del microcontrolador, esta y otras variables que están agregadas, son elementos que se utilizan en la función “SERIN”, que permite aceptar datos en forma serial.
Además, se debe definir el tipo y tamaño de palabra con que se tiene que trabajar, para esto se definen conforme a la configuración que requiere cada motor, estos pueden trabajar a diferentes velocidades y direcciones, cada velocidad y dirección tienen un valor determinado, se necesita entonces de un tamaño de palabra de 6 caracteres, tres para
En este caso la variable para la velocidad de comunicación se define con la palabra
“baudrate“y es de tipo constante y la variable del tamaño de pulso queda definido con la
palabra “pulse_width”de tipo variable con formato de palabra Byte. En la figura 2.5 se
[image:37.612.115.536.184.453.2]observa este procedimiento.
Figura 2.5 Declaración de la velocidad de transmisión y del ancho del pulso.
4.- La parte que continua en la programación es una asignación de variables que podrán
ser vistas al final, en el apartado de anexos. Posterior a la asignación de
variables, ubicando el programa en la parte principal, se hace utilidad de la función
“SERIN”, que permite recibir datos hacia el microcontrolador indicando el puerto, en este
caso es asociado al puerto cero, esto es debido a la configuración asignada de pines en la tarjeta de Bluetooth eb500.
En la función SERIN, conforme a la estructura que esta requiere, se indica la entrada de los datos por el puerto cero, mientras que el STR indica una cadena de caracteres la cual debe ser igual al ancho del pulso.
En este caso el número 48 es el compatible al número cero en el lenguaje ASCII, entonces la diferencia del dato mandado desde la parte del emisor menos el número cero en ASCII, multiplicado este dato por las unidades, decenas y centenas proporciona números en formato decimal correspondiente al del microcontrolador, entonces la sumatoria de estos datos es igual al número necesario para la movilidad de los motores. La figura 2.6 muestra el código descrito anteriormente.
[image:38.612.116.535.226.542.2]
Figura 2.6 Conversión de los datos.
Entonces, si el microcontrolador recibe un dato desde el emisor en formato carácter de 850 para un motor, lo que hace es convertir primero el 8 en centenas, después el 5 en
decenas y por último el cero en unidades, y como se observa en la variable “auxiliar4” se
hace la sumatoria para obtener el numero 850 necesario para mover un motor.
[image:39.612.106.541.312.581.2]5.-Finalmente en la parte principal del programa para el microcontrolador, los datos convertidos en el paso anterior, son mandados como pulsos de salida a las variables que se asignaron en el paso 2 para los motores, es así como en la parte del receptor, el microcontrolador realiza una serie de operaciones para que el robot BoeBot pueda realizar movimientos sin ningún tipo de cableado (ver figura 2.7).
2.3 Asignación de puertos COM.
Para establecer la parte del emisor, es necesario saber el “puerto COM” del dispositivo
Bluetooth conectado a la computadora, este dato es indispensable pues será utilizado en la rutina de programación en MATLAB. El proceso para buscar la asignación de puertos se puede ver a continuación.
Como primer paso se conecta el dispositivo Bluetooth a la computadora, entonces se inicializa en pantalla el asistente para agregar nuevos dispositivos Bluetooth (ver figura 2.8), y para continuar se tiene que activar la casilla en donde menciona que el dispositivo está configurado para ser detectado.
Posteriormente se despliega una ventana de búsqueda, detectando todos los dispositivos disponibles para una posible conexión, en este caso, se puede observar en la figura 2.9 que la tarjeta eb500 se encuentra entre los dispositivos detectados.
Entonces, se selecciona para agregar como dispositivo nuevo, y para obtener un punto de acceso a este dispositivo se agrega una clave de paso que en este caso corresponde cuatro ceros.
[image:41.612.87.574.241.479.2].
Figura 2.9 Selección del dispositivo y asignación de clave de paso.
Una vez proporcionada la clave de paso para que el dispositivo eb500 pueda ser agregado, aparece una nueva ventana como la en la figura 2.8, en la que se indica que la clave ha sido habilitada y que el dispositivo ha sido agregado.
COM elegidos permanecen activos durante toda la comunicación y son utilizados para la programación.
Figura 2.8 Elección de puertos COM en la conexión Bluetooth.
[image:42.612.122.529.158.373.2]Finalmente se despliega la ventana de finalización del asistente mostrada en la figura 2.10, indicando los puertos y el dispositivo asignado para la transmisión de datos.
2.4 Plataforma de transmisión en MATLAB.
La parte correspondiente a la transmisión queda establecida en el lenguaje de programación MATLAB, pues es una herramienta que nos permite agregar más aplicaciones al proyecto conforme el usuario o la aplicación lo requiera.
Esta parte queda definida por la creación de un objeto, en donde de acuerdo a la sintaxis
de programación, es igualado a la función “instrfind” la cual sirve para encontrar objetos
del algún puerto serial con valores y propiedades especificado, en este caso estos valores indican el tipo de comunicación que se está utilizando la cual es de forma serial, el puerto
“COM” que fue asignado al dispositivo Bluetooth y el “TAG” , que se deja en blanco,
pues solo sirve como un identificador para el programa (ver figura 2.11).
Figura 2.11 Sintaxis del objeto
Es importante establecer este objeto, pues es el elemento del programa que se encarga de enlazar el puerto COM con los demás elementos en todo el programa.
La parte que continua es un ciclo “if / else “ mostrado en la figura 2.12, que utiliza la
función “isempty“ dentro de su estructura, esta es la encargada de devolver un 1 si el
objeto es un conjunto vacío y 0 en caso contrario. Esta función es aplicada al objeto, definiendo como igualdad el objeto y el puerto serial con su respectivo puerto COM, entonces cuando el objeto contiene un puerto COM habilitado se manda un cero hacia el puerto serial que se esté utilizando y se continua con el programa, en caso contrario se cierra el objeto y se manda un uno, puesto que no tiene puerto COM asignado.
Figura 2.12 Ciclo de comparación del objeto.
La figura 2.13 muestra el proceso para informar que la conexión ha sido establecida. Entonces como se ha encontrado un puerto COM habilitado, se manda una instrucción
para abrir el objeto y posteriormente desplegar un mensaje de alerta que informe: “se logro establecer la comunicación, vea si el Led está encendido” (el Led indicador está
Figura 2.13 Función objeto habilitada.
Para comprobar que se ha establecido la comunicación con el robot BoeBot, se verifica el Led indicador en la tarjeta eb500 montada en el robot,
[image:45.612.205.447.422.683.2]Para comprobar que la transmisión se realice correctamente, se mandan las primeras instrucciones al robot BoeBot, respetando el formato para los movimientos. Como
primera prueba con el robot se realizara un ciclo “for” por espacio de 20 veces en donde
se le indica que avance en retroceso con los valores 650 y 850 respectivamente, recordando que los primeros tres valores indican el movimiento de un servomotor y los otros tres al otro.
[image:46.612.99.548.226.455.2]
2.5 Diagrama a bloques de la comunicación.
Para entender un poco más lo que está pasando en la parte de la comunicación, se presenta un diagrama a bloques tanto en la parte del emisor, como en la parte del receptor.
a) Transmisión
B) Recepción
C
APÍTULO 3
|
Introducción.
Una interfaz grafica es una de las partes más importantes de cualquier programa ya que nos permite determinar que tan factible puede ser el desempeño del programa ante los comandos e instrucciones que el usuario quiera ejecutar. Es por eso que una interfaz grafica tiene una gran importancia para los usuarios ya que facilita la interacción con cualquier programa.
Para dar una idea de una interfaz grafica, existen como ejemplos las ventanas de Word, Excel, Internet, MATLAB, entre otras. Básicamente una interfaz grafica consiste de botones, menús, ventanas, etc., que ayudan a utilizar de manera muy simple programas realizados en entornos como Linux y Windows.
Es necesario diseñar una interfaz grafica, porque el usuario que desee controlar al robot BoeBot necesita de un programa con las características antes mencionadas para enviar los comandos adecuados.
Las interfaces graficas también se conocen como interfaces de usuario, el nombre en inglés de las interfaces graficas es Graphical User Interface y se denominan GUI. Existen diferentes lenguajes de programación que permiten la creación de GUIs como Visual C, Visual Basic, TK y MATLAB entre otros. Todos ellos permiten usar diferentes controles y tienen distintas maneras de programación.
De las plataformas antes mencionadas, la que se eligió para el diseño de la GUI del prototipo es MATLAB, debido a que la comunicación entre la PC y el robot está elaborada bajo este mismo lenguaje de programación, además de que permite realizar
GUIs de una manera fácil y rápida usando una herramienta llamada GUIDE (GUI
Development Environment).
3.1 GUIDE.
La forma de obtener una GUIDE con MATLAB, es mediante la creación de los objetos y definir la acciones que cada uno va a realizar. Al usar GUIDE para la creación de una GUI se obtienen dos archivos: un archivo FIG (contiene la descripción de los componentes de la GUI) y un archivo M (contiene las funciones y los controles de la GUI así como el callback). Un callback es la acción que lleva a cabo un objeto de la GUI cuando el usuario lo active.
Se puede comenzar a crear una GUI en MATLAB usando GUIDE de las siguientes dos formas:
- Ejecutar la siguiente instrucción en nuestra ventana de comandos.
>>>guide
- Hacer click en el ícono que muestra la figura:
Figura3.1 Icono de GUIDE.
Al ejecutar cualquiera de las dos instrucciones en MATLAB aparece una ventana con opciones para la creación de la interfaz gráfica o para abrir un proyecto ya existente (ver figura 3.2).
Para la creación de una nueva interfaz gráfica se debe seleccionar la opción “Black GUI
(Default), que muestra una ventana compuesta de los controles y área de diseño de GUIDE.
Figura 3.3 Ventana de diseño.
EL área de diseño es el espacio que se dispone para la creación de una interfaz gráfica.
3.1.1 Propiedades de GUIDE.
[image:52.612.167.486.209.500.2]A continuación se mencionan las partes más importantes que son necesarias para la creación de un proyecto en GUIDE. En la figura 3.4 se describen las funciones principales de los elementos de la ventana de diseño.
Tabla 3.4 Controles de GUIDE.
3.1.2 Propiedades de los elementos.
Los elementos cuentan con un conjunto de opciones que permiten cambiar algunas de las características.
Para poder para poder acceder a este conjunto de opciones se debe dar click derecho en el control como se muestra en la figura 3.4.
Icono Tipo Descripción
Push Button Invoca un evento inmediatamente. Radio Button Indica una opción que puede ser
seleccionada.
Edit Text Caja para editar texto.
Static Text Muestra un string de texto en una caja. Toggle Button Solo dos estados, “on” o “off”.
Axes Ejes.
Para cambiar características de los elementos como: el color, nombre, tag, valor, string, etc., se selecciona la opción Inspector de Propiedades. La figura 3.4 se muestra la ventana que aparece cuando se activa el Inspector de Propiedades.
[image:53.612.236.405.408.686.2]Figura 3.5 Inspector de Propiedades. Figura 3.4
Para poder asignar la acción que lleva a cabo un elemento de la interfaz gráfica cuando el usuario lo active es necesario ingresar al callback como se muestra en la figura 3.6
Figura 3.6 Acceso al Callback.
Al accesar al Callback del elemento se ingresa al archivo tipo M (ver figura 3.7). En el archivo tipo M es donde se agrega el código de programación correspondiente para que el elemento realice una función al ser invocado.
Las propiedades varían dependiendo del elemento, algunas de las más importantes son las siguientes:
BackgroundColor: Cambia el color del fondo de los elementos.
Callback: La propiedad más importante del control, ya que determina la función del control cuando se active.
Enable: Activa /desactiva un elemento.
String: Es el texto que se muestra en el elemento para el caso de Edit Text, Push Button, Static Text, etc.
Tag: También es una propiedad importante que sirve para regresar datos o identificar al
elemento.
3.2 GUI del prototipo.
Se espera que el usuario que va a operar al robot BoeBot pueda mandar instrucciones a través de elementos gráficos desde la PC de forma fácil y segura.
Para comenzar a diseñar la interfaz grafica se creó una nueva GUIDE y se agregaron los
siguientes elementos: dos “Axes”, tres “Static Text” y nueve “Push Button”, este proyecto
se guarda con el nombre de GUI_BOEBOT.fig. Al colocar todos los controles mencionados anteriormente se tendrá una estructura como la que se muestra en la figura 3.8.
[image:55.612.177.455.453.694.2]
3.2.1 Elementos de Texto Estático (Static Text).
[image:56.612.233.418.554.667.2]Con ayuda del Inspector de Propiedades se edita el primer Static Text cambiando el String a Instituto Politécnico Nacional, como se muestra en la figura 3.9.
Figura 3.9 Cambiando de la propiedad String a Instituto Politécnico Nacional.
En el siguiente orden se modifican las propiedades de String de cada Static Text de la siguiente manera:
String: Escuela Superior de Ingeniería Mecánica y Eléctrica
String: Ingeniería en Comunicaciones y Electrónica
3.2.2 Inserción de imágenes (Axes).
Los elementos Axes se utilizaron para la inserción de imágenes en la interfaz grafica, para el cual es necesario agregar código de programación en el archivo tipo M.
En la figura 3.10 se muestran los escudos del IPN y de la ESIME los cuales se utilizan como presentación en la parte superior de la GUI.
3.2.3 Elementos tipo Push Button.
Para los Push Button se modifica la propiedad BackgroundColor (ver figura 3.11). Esta propiedad permitirá cambiar el color de fondo de los elementos.
En la tabla 3.2 se asignan las funciones que realizara cada uno de los Push Button.
Tabla 3.2 Funciones de los controles.
ELEMENTOS FUNCIÓN
Push Button 1 Se encarga de iniciar el protocolo bluetooth.
Push Button 2 Se encarga de finalizar el protocolo bluetooth además de cerrar
la interfaz.
Push Button 3 El robot se desplaza hacia adelante.
Push Button 4 El robot se desplaza hacia atrás.
Push Button 5 El robot se desplaza hacia la izquierda.
Push Button 6 El robot se desplaza hacia la derecha.
Push Button 7 El robot gira hacia la izquierda.
Push Button 8 El robot gira hacia la derecha.
Push Button 9 Muestra un mensaje.
El siguiente paso es editar la propiedad Tag de cada Push Button como se muestra en la figura 3.12. El Tag es el nombre con que se va a identificar cada elemento de la interfaz gráfica, seleccionamos Tag en el inspector de propiedades y los modificamos.
Figura 3.12 Propiedad Tag modificada en el Push Button.
En la tabla 3.3 se muestra la manera en que se ha modificado el Tag de los Push Button.
Tabla 3.3 Tag de los Push Button.
Para definir la función que realiza cada Push Button se debe editar la propiedad Callback colocando la programación correspondiente en el archivo tipo M.
TAG NOMBRE
Push Button 1 Conectar.
Push Button 2 Salir.
Push Button 3 Adelante.
Push Button 4 Atrás.
Push Button 5 Izquierda.
Push Button 6 Derecha.
Push Button 7 Gira Izquierda.
Push Button 8 Gira Derecha
Los elementos de comunicación mostrados en la figura 3.13 permiten iniciar o terminar la comunicación mediante el protocolo Bluetooth entre la PC y el robot BOE BOT.
Figura 3.13 Controles de Comunicación
[image:59.612.178.461.332.597.2]Los elementos de Dirección mostrados en la figura 3.14 permiten controlar los movimientos del robot BoeBot.
Figura 3.14 Controles de Dirección.
Figura 3.15 Imágenes de dirección.
3.3 Estructura final del prototipo
En la figura 3.16 se muestra la estructura de la GUI final, que al ser ejecutada será capaz de realizar todas las funciones consideradas anteriormente.
3.4 Presentación de la GUI.
Figura 3.17 GUI del prototipo.
Ya obtenida la GUI del prototipo, como se muestra en la figura 3.17, se puede hacer uso de ella, primeramente estableciendo comunicación mediante el protocolo Bluetooth, para
realizar esta función se debe presionar el Push Button “Conectar” el cual mostrara un
mensaje que indica cuando se ha establecido la comunicación entre la PC y el robot BoeBot. A partir de ese momento, es posible utilizar los controles de dirección, que permiten al usuario mover y desplazar al robot BoeBot.
C
APÍTULO 4
|
“
PRUEBAS Y
Introducción.
Este capítulo presenta pruebas que evalúan el desempeño del robot BoeBot, una vez implementados los requerimientos del sistema; se establecieron distintos casos para comprobar su funcionamiento en condiciones estables, también incluye resultados reales obtenidos del sistema, tablas de las pruebas realizadas y análisis complementarios. Todo esto, con el fin de mostrar los objetivos logrados, mediante este proyecto.
4.1 Alcance Promedio del Robot BoeBot.
Se obtuvo la distancia promedio realizando pruebas, éstas en condiciones estables en una zona cerrada donde no afectara a la comunicación inalámbrica las condiciones climatológicas, libre de ruido e interferencia. Los resultados obtenidos se muestran en la Tabla 4.1.
Tabla 4.1 Alcance promedio de la comunicación inalámbrica
Esta prueba nos da como resultado que el sistema de comunicación en condiciones estables tiene un alcance de 67m, trabajando al 100%de su eficiencia.
Pruebas realizadas Alcance de la comunicación(en metros ) Prueba numero 1 60m
Prueba numero 2 75m Prueba numero 3 75m Prueba numero 4 65m Prueba numero 5 60m
[image:63.612.178.478.325.611.2]4.2 Eficiencia de comunicación en distintos entornos de
operación.
El sistema de comunicación en condiciones estables tiene un alcance de 67m, trabajando con una eficiencia del 100%. Para comprobar si se siguen teniendo estas condiciones en diferentes entornos de operación, se realizaron pruebas seleccionado distintos obstáculos, como son:
a) Persona b) Vidrio c) Madera d) Concreto
e) Horno de Microondas
A continuación se describirá cada prueba realizada.
a) Persona
Esta prueba se realizo seleccionando al azar a una persona que se posiciono entre la PC y el robot BoeBot como se muestra en la figura 4.1.
La descripción del obstáculo, así como los resultados obtenidos de la prueba son mostrados en la Tabla 4.2.
Tabla 4.2 Resultados de la prueba con una persona como obstáculo.
Obstáculo físico Descripción del
obstáculo Físico Resultado obtenido en la prueba Comunicación Alcance de la
Persona Una persona cualquiera.
La Prueba realizada nos da como resultado que el sistema trabaja con una
Figura 4. I Persona como obstáculo.
b) Vidrio.
La figura 4.2 muestra la estructura de conexión de la prueba que se realizo tomando como obstáculo una puerta de vidrio; la descripción del obstáculo, así como los resultados obtenidos de la prueba se muestran en la Tabla 4.3.
Tabla 4.3 Resultados de la prueba con obstáculo de vidrio.
Obstáculo físico. Descripción del obstáculo.
Resultado obtenido en la prueba.
Alcance de la comunicación.
Vidrio
Puerta de vidrio de 2m de alto por 1.5m
de ancho.
La Prueba realizada nos da como resultado que el sistema trabaja con una
eficiencia de 59.70 %.
Figura 4.2 Vidrio como obstáculo.
c) Madera.
La figura 4.3 muestra la estructura de conexión de la prueba que se realizo tomando como obstáculo una puerta de madera; la descripción del obstáculo, así como los resultados obtenidos de la prueba son mostrados en la Tabla 4.4.
Tabla 4.4 Resultados de la prueba con obstáculo de madera.
Obstáculo físico Descripción del obstáculo Físico
Descripción de el resultado obtenido en la
prueba
Distancia recorrida por el Robot
BoeBot
Madera Puerta de madera de 1.90m de alto por 1.10m de ancho
La Prueba realizada nos da como resultado que el sistema trabaja con una
eficiencia de 52.23%.
Figura 4.3 Madera como Obstáculo.
d) Concreto
La prueba se realizo tomando como obstáculo una pared de concreto, las especificaciones del obstáculo así como los resultados obtenidos en la prueba son mostrados en la Tabla 4.5; la estructura de conexión se muestra en la Figura 4.4.
.
Tabla 4.5 Resultados de la prueba con obstáculo de concreto.
Obstáculo físico obstáculo Físico Descripción del Descripción del resultado obtenido en la prueba recorrida por el Distancia Robot BoeBot
Pared de concreto
La prueba se realizo a través de una pared de concreto con 18cm
de ancho por 2m de alto.
La Prueba realizada nos da como resultado que el sistema trabaja con una
eficiencia de 10.44% .
Figura 4.4 Concreto como Obstáculo.
e) Horno de Microondas.
La prueba se realizo colocando al Robot BoeBot dentro de un Horno de Microondas serrando la puerta de este, las especificaciones del obstáculo así como los resultados obtenidos de la prueban son mostrados en la Tabla 4.6; la estructura de conexión se muestra en la Figura 4.5.
Tabla 4.6 Resultados de la prueba con el Robot BoeBot dentro de un Horno de Microondas.
Obstáculo físico obstáculo Físico Descripción del Descripción del resultado obtenido en la prueba recorrida por el Distancia Robot BoeBot
Horno de Microondas
Horno de Microondas convencional, simulando una jaula
de Faraday.
La Prueba realizada nos da como resultado que el sistema trabaja con una
eficiencia de 1.49 %.
1m de distancia entre la PC y el Robot BoeBot dentro del horno
Figura 4.5 Robot BoeBot dentro de un Horno de Microondas.
4.3 Eficiencia de la comunicación con dispositivos celulares
operando a la misma frecuencia.
Se realizo un enlace de comunicación inalámbrica de la PC y el Robot BoeBot; rodeando a este ultimo de dispositivos celulares; el esquema de comunicación inalámbrica se muestra en la figura 4.6.
C
APÍTULO 5
|
Introducción.
La robótica es una disciplina, que tiene múltiples campos de acción. Inicialmente se diseñaron robots para uso industrial, pero con el paso del tiempo, se han ampliado sus campos de acción. Hoy en día, es común observar aplicaciones de robots en áreas como: la industrial, la exploración, la medicina y el entretenimiento, entre muchas otras.
5.1 Aplicación del prototipo.
Dentro de la robotica de exploracion se pueden destacar los prototipos desarrollados por la NASA, utilizados para la experimentacion del espacio exterior, los cuales permiten realizar tareas en lugares que pueden resultar hostiles para el ser humano debido al entorno que presentan como: lugares estrechos, radioactivos, de condiciones climatologicas extremas, etc, ademas el dispositivo debe tener la capacidad de brindar informacion del entorno en que se encuentra.
Es por eso que se eligio esta aplicación. El robot BoeBot puede utilizarse como un vehículo de exploración debido a las características que posee en las que se destacan las siguientes:
1. El robot BoeBot es capaz de recibir y ejecutar instrucciones de un usuario de forma eficiente.
2. Es capaz de introducirse en entornos hostiles para el ser humano de forma fácil y segura.
3. Se puede establecer una comunicación inalámbrica para mayor flexibilidad.
4. Puede determinar la situación del entorno y darla a conocer al usuario para una adecuada toma de decisiones.
5. Tiene un movimiento continuo y pueda cambiar de dirección en el momento que el usuario lo desee.
Se utilizo una aplicación llamada Mobiola Web Camera diseñada para teléfonos celulares que soporten versiones como Symbian, Windows Mobile o Blackberry.
[image:73.612.133.498.474.681.2]Este pequeño programa permite convertir la camara de un teléfono celular en una web cam con opcion de ser conectada a la PC por medio del protocolo bluetooth.
Figura 5.1 Telefono celular conectado a la PC por bluetooth.
5.2 GUI de la aplicación.
Es necesario que el usuario pueda adquirir información visual del entorno en que se encuentra el robot BoeBot, por lo cual se gregaron controles a la GUI que permitieran monitoriar el entorno de interes atraves de la camara del teléfono celular.
Primeramente se modifico la estructura de la GUI agregando ventanas, para la captura de vídeo e imagen como se muestra en la figura 6.1.
Figura 5.2 Venatanas de captura de vídeo e imagen. PC