INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
“DISEÑO DE UNA PLATAFORMA GIRATORIA EN
ASIENTO DE AUTOMÓVIL PARA PERSONAS
DISCAPACITADAS”
TESIS
QUE PARA OBTENER EL GRADO DE:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN:
CHACÓN SANTIAGO YAN CARLO
HERRERA HERNÁNDEZ MIGUEL ÁNGEL
RODRÍGUEZ CASTELÁN OCTAVIO CESAR
ASESORES:
M. EN C. PEDRO FCO. HUERTA GONZÁLEZ
DR. JAIME JOSÉ RODRÍGUEZ RIVAS
2
1.1 OBJETIVO GENERAL………....4
1.2 OBJETIVOS ESPECÍFICOS……….………...4
1.3JUSTIFICACIÓN……….....4
1.4ANTECEDENTES DEL TRABAJO A DESARROLLAR………..……...5
1.5 APORTACIONES DEL TRABAJO………....……….7
1.6 CONTENIDO DEL TRABAJO………...8
CAPITULO 2 DESARROLLO DEL SISTEMA MECÁNICO 2.1 DESCRIPCIÓN DE LA PLATAFORMA………....9
2.2 DISEÑO DE LA PLATAFORMA……….....10
2.3 SELECCIÓN DE LOS ENGRANES……….......…...20
2.3.1 ENGRANES RECTOS……….…...20
2.3.1.1 NÚMERO DE DIENTES………..………..20
2.3.1.2 MÓDULO………..……....21
2.3.1.3 DIÁMETRO PRIMITIVO………....……….22
2.3.1.4 PASO CIRCULAR……….……….22
2.3.1.5 ESPESOR DE DIENTES………22
2.3.1.6 DIÁMETRO EXTERIOR……….……….....22
2.3.1.7 DIÁMETRO INTERIOR………...…23
2.3.1.8 PIE DE DIENTE……….....23
2.3.1.9 ALTURA DE DIENTE……….….……….....23
2.3.1.10 DIÁMETRO PITCH………..………...23
2.3.2 MECANISMO PIÑÓN-CREMALLERA…………....24
2.3.2.1 VELOCIDAD DE UNA CREMALLERA….....25
2.3.3 TORNILLO SIN FIN………....25
2.4 DISEÑO DE LOS ENGRANES EN SOLID WORKS………...27
2.5 SELECCIÓN DE LOS MOTORES………28
2.5.1 POTENCIA MECÁNICA………..………..….29
2.5.2 PAR………...……….………..30
2.5.3 MOTORES DEL PROYECTO……….31
2.6 INTEGRACION DEL SISTEMA MECÁNICO………...………33
2.6.1 SIMULACIÓN DEL FUNCIONAMIENTO DE LA PLATAFORMA……….. ...35
3
3.2 OPERACIÓN DEL CIRCUITO AL MOTOR………...…...39
3.3 CONTROL DE INVERSIÓN DE GIRO DE LOS MOTORES……...40
3.4 SELECCIÓN DE LOS INTERRUPTORES DE LÍMITE………....41
3.5 SELECCIÓN DEL RELEVADOR LÓGICO………43
3.5.1 CONEXIÓN DEL RELEVADOR LÓGICO………...43
3.6 PROGRAMACIÓN………...44
CAPITULO 4 RELACIÓN DE COSTOS DEL PROYECTO 4.1 ESTUDIO DE PRE FACTIBILIDAD……….……...….47
4.1.1 ESTUDIO TECNOLÓGICO……….……...47
4.1.2 SUMINISTROS………....…..47
4.1.3 ESTUDIO FINANCIERO……….……..….48
CAPITULO 5 CONCLUSIONES………..…………51
GLOSARIO………...52
BIBLIOGRAFÍA……….54
4
Capítulo 1 CAPÍTULO 1INTRODUCCIÓN
En este capítulo se describen los objetivos principales del proyecto realizado, se muestra una justificación de los motivos por el cual el enfoque al mismo, los antecedentes históricos, que datan de los avances existentes a la fecha, de los sistemas y tecnología que hay actualmente en base al proyecto realizado y las aportaciones al trabajo terminal.
1.1 OBJETIVO GENERAL
Diseño de una plataforma giratoria que permita posicionar un asiento de automóvil para que pueda facilitar el ascenso y descenso de personas discapacidad.
1.2 OBJETIVOS ESPECÍFICOS
Facilitar el traslado en automóvil de personas con algún tipo de discapacidad.
Evitar lastimar y agravar más la lesión de la persona discapacitada.
Evitar lesiones a personas encargadas de cuidar y trasladar a dichas personas.
Hacer un sistema de control que esté al alcance de toda persona que le es difícil entrar y salir de un vehículo.
Implementar una base giratoria accionada por un motor de CD
Controlar el asiento para que dé un giro de 90° a la derecha y 90° a la izquierda
Adaptar el proyecto en un automóvil económico que esté al alcance de personas de bajos recursos.
1.3 JUSTIFICACIÓN
5
Capítulo 1 Después de que el gobierno ha hecho implementaciones para personas con discapacidad en el transporté público estos han fallado por la falta de cultura en nuestro país y la discriminación hacia estas personas, se pensó en hacer un medio de transporte en el cual las personas discapacitadas contaran con un transporte cómodo donde no corran en riesgo como agravar más su problema o sufrir alguna lesión, por este motivo se investigó como se trasladaban las personas discapacitadas y que sector estaba más descubierto, la investigación dio como resultado que el sector más descubierto es la clase baja, el siguiente paso fue investigar qué tipo de vehículo era el más económico y utilizado por este grupo de gente, y el automóvil que arrojo dicha investigación fue el tipo sedán, por ello nos enfocaremos en el modelo Tsuru por ser uno de los más comunes y económicos en el mercado. [1]1.4 ANTECEDENTES DEL TRABAJO A DESARROLLAR
La silla de ruedas fue creada especialmente para personas minusválidas. La primera patente sobre una silla de ruedas data de 1869, como se indica en la fig. 1.1. Se trataba de un modelo bianual impulsado por ruedas traseras. Al poco tiempo surgieron nuevos modelos de tres ruedas, cuatro ruedas, eléctricas, esta se fue adaptando según la necesidad de las personas [2]
6
Capítulo 1 esto se hizo para que las personas minusválidas giraran sobre él para desplazarse fuera del vehículo.Fig. 1.2 Sillón de transferencia implementado en camioneta
La rampa sencilla para camioneta es utilizada para poder subir la silla de ruedas sin tener que bajar a la persona discapacitada de la misma, en la fig. 1.3 se muestra el diseño.
Fig. 1.3 Rampa sencilla para camioneta
La plataforma de doble brazo tiene la misma finalidad que la fig. 1.3, la diferencia entre ambos diseños es que la fig. 1.4 tiene implementado un sistema mecánico.
7
Capítulo 1 Transporte público para discapacitados. Se implementó una rampa de doble brazo que le ayudara a personas discapacitadas a utilizar el transporte público como se muestra en la fig. 1.5, este sistema no fue de mucha utilidad ya que no dio el resultado esperado.Fig. 1.5 Transporte publico
Grúa elevadora de sillas de ruedas. Fue implementado solo en camionetas su costo es muy elevado, tiene como finalidad guardar la silla de ruedas una vez que la persona discapacitada se introduzca en el vehículo como se muestra en la fig. 1.6.
Fig. 1.6 Grúa elevadora de silla de ruedas
1.5 APORTACIONES DEL TRABAJO
8
Capítulo 1 1.6 CONTENIDO DEL TRABAJOSe implementa a un automóvil tipo sedán (TSURU), en él se modifica el asiento del copiloto, y opere de la siguiente forme: El asiento se montara en una plataforma que nos permita girar 90° a la derecha y 90° a la izquierda, esto se hará por medio de un motor reductor y un relevador electrónico programado es controlado como se desea, para que el asiento salga del vehículo el operador oprime un botón de seguridad o desbloqueo , el usuario discapacitado abre la puerta y el asiento sale, el cinturón tiene que ser abrochado para que el asiento se guarde, para poder salir el cinturón deberá estar desabrochado de esta forma el usuario hará un esfuerzo menor para entrar al automóvil.
A continuación se muestra una imagen que nos mostrara el tipo de discapacidad a que está enfocado el prototipo a implementar en el asiento del automóvil. [2]
Fig. 1.7 Pérdida o discapacidad Fig. 1.8 Pérdida o discapacidad Temporal de una extremidad inferior temporal inferior a la rodilla.
9
Capítulo 2 CAPÍTULO 2DESARROLLO DE SISTEMA MÉCANICO
Para el desarrollo del sistema mecánico, se diseñaron algunos mecanismos los cuales permiten el giro de la plataforma, cabe destacar que en algunos casos la selección implico algunos cálculos, los cuales se mencionan en el desarrollo del capítulo, así también se muestran las piezas de diseño en Solid Works para la simulación del proyecto.
2.1 DESCRIPCIÓN DE LA PLATAFORMA
La Fig 2.1 describe el funcionamiento de la plataforma, es decir la forma en la que esta opera para el ascenso de las personas.
ASCENSO
OPRIMIR BOTÓN DE SEGURIDAD O DESBLOQUEO
ABRIR LA PUERTA PARA QUE EL ASIENTO SALGA EL CINTURÓN TIENE QUE ESTAR DES-ABROCHADO
SENTAR A LA PERSONA Y ABROCHAR CINTURÓN DE SEGURIDAD
EL ASIENTO ENTRA Y SE PUEDE CERRAR LA PUERTA
10
Capítulo 2 DESCENSOABRIR LA PUERTA PARA QUE EL ASIENTO SALGA EL CINTURÓN TIENE QUE ESTAR DES-ABROCHADO
EL ASIENTO SALE Y LA PERSONA PUEDE SALIR DEL VEHÍCULO
2.2 Diagrama de bloques del funcionamiento de la plataforma para descenso
2.2 DISEÑO DE LA PLATAFORMA
El diseño se basó en el funcionamiento y diseño de algunos tornos, estas máquinas tienen una estructura hueca en donde se coloca su mecanismo, de tal modo que reduce el espacio que ocupa, este diseño fue el más viable para colocarse en el vehículo propuesto.
El diseño se simuló, utilizando los programas Auto Cad y Solid Works, en ellos se realizó pieza por pieza tomándose las medidas reales del automóvil acotadas en (mm).
11
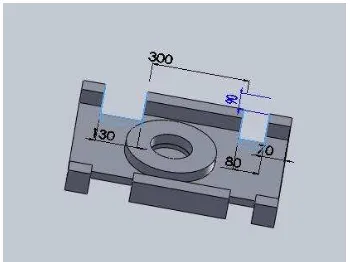
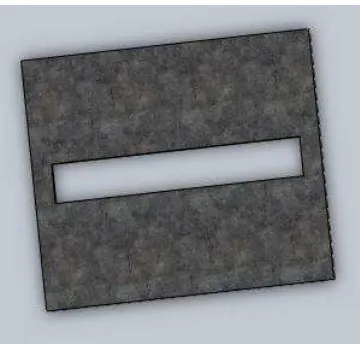
Capítulo 2 De la figura 2.3 a) hasta la figura 2.3 d) se describe como fue realizada la base de la plataforma en el programa Solid Works, la base está diseñada de acuerdo a la estructura que tiene el vehículo, el extruido que tiene se realizó con el fin de fijar la plataforma del mismo modo en que están los asientos, el extruido cilíndrico es la base de la flecha.
Fig. 2.3 a) Medidas laterales de la base Fig. 2.3 b) Cortes que permiten asegurar
[image:12.612.330.505.212.343.2] [image:12.612.95.265.213.351.2]
12
Capítulo 2 La figura 2.4 a) y la figura 2.4 b) muestran el diseño de la tapa, la cual va a ir entre la base cilíndrica y la flecha está hecha de un material que se le conoce como chapa de teflón, su función es impedir la fricción entre metales y por ende tiende a tener un mejor funcionamiento al momento del giro.
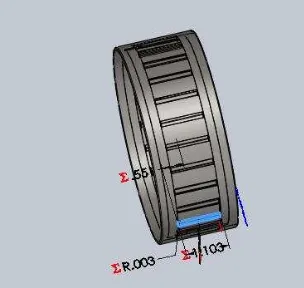
Fig. 2.4 a) Medidas de la tapa Fig.2.4 b) Pieza terminada en Solid Works De la figura 2.5 a) hasta la figura 2.5 d) se describe el valero que va dentro del cilindro de la base, este permitira que la flecha gire con mas facilidad y al mismo tiempo evita la friccion de los metales.
[image:13.612.329.495.186.350.2] [image:13.612.80.276.187.349.2] [image:13.612.341.513.469.635.2] [image:13.612.116.268.471.615.2]
13
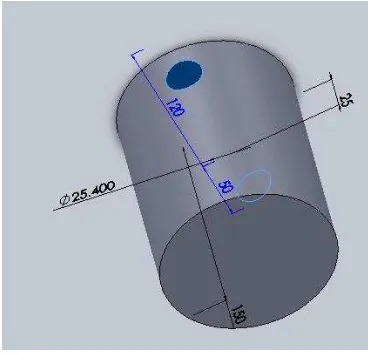
Capítulo 2Fig. 2.5 c) Radios y distancias Fig. 2.5 d) Pieza terminada en Solid Works De la figura 2.6 a) hasta la figura 2.6 c) se describe el diseño de la flecha, la cual va a servir como soporte de la tapa de la plataforma esta va a llevar una perforacion en la parte superior para asegurar con un perno la tapa y la flecha.
[image:14.612.340.524.385.562.2]
14
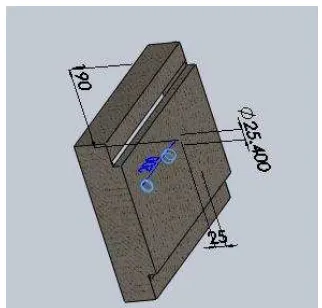
Capítulo 2 Fig. 2.6 c) Flecha terminada en Solid WorksDe la figura 2.7 a) hasta la figura 2.7 d) se describe la adaptacion que lleva el motor para colocar el sin fin con esto sea completa el mecanismo que hara el movimiento deseado de la plataforma.
15
Capítulo 2 Fig 2.7 c) Medidas de perforacion Fig 2.7 d) pieza terminada enDonde entra la flecha del motor Solid Works
De la figura 2.8 a) hasta la figura 2.8 d) se describe la tapa de la plataforma como ya se habia comentado se ensambla en la parte superior de la flecha, en la tapa se colocara los rieles del sillon y se coloca el segundo motor para hacer el segundo movimiento que realiza la plataforma.
Fig. 2.8 a) Medidas base de la Fig 2.8 b) Medidas del cilindro donde
16
Capítulo 2 Fig. 2.8 c. Medidas de la perforación Fig. 2.8 d) Pieza terminadade donde se asegura la base con la en Solid Works flecha
De la figura 2.9 a. hasta la figura 2.9 c. se describe una lamina que se coloca en la parte de baja del asiento, el motivo por el cual se pone dicha placa es con el fin de colocar en ella una cremallera que junto con el motor y el engrane haran el movimiento del asiento hacia atrás y hacia delante.
[image:17.612.100.261.101.255.2] [image:17.612.338.495.104.259.2]
17
Capítulo 2 Fig. 2.9 c) Pieza terminada en Solid Works2.3 SELECCIÓN DE LOS ENGRANES
Para la selección de los engranes de la plataforma se desarrollaron algunos cálculos como el numero de dientes el diámetro primitivo o el paso circular que se enuncian a continuación para los tres tipos de engranes usados en el proyecto.
2.3.1. ENGRANES RECTOS
[image:18.612.223.403.106.278.2]Los engranajes rectos son el tipo de engranaje más simple que existe, se utilizó generalmente para dar movimiento a la plataforma, sus características son las sig.
18
Capítulo 2 El número de dientes que se simboliza con la letra (Z). No debe estar por debajo de 18 dientes cuando el ángulo de presión es 20º ni por debajo de 12 dientes cuando el ángulo de presión es de 25º. Para el caso del proyecto se define mediante un estándar a 24 dientes en base a las características del tornillo sin fin, el ángulo de presión y las normas ANSI AGMA para el cálculo de engranes.[3]2.3.1.2 MÓDULO
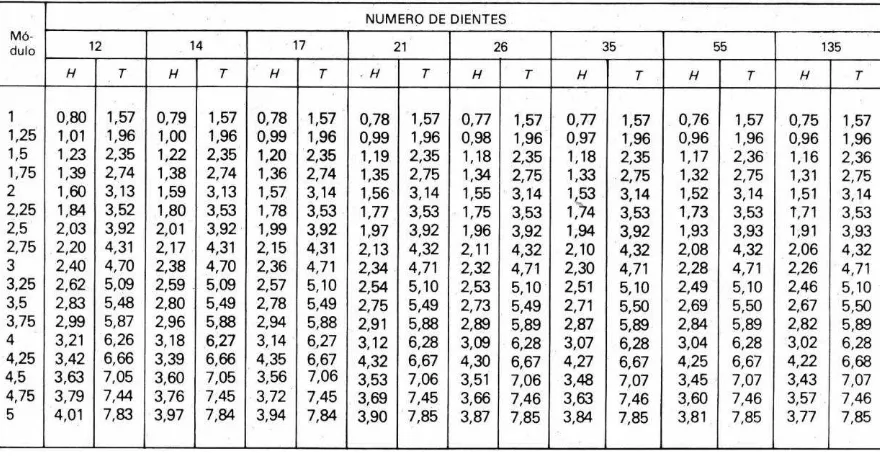
[image:19.612.87.527.338.569.2]El modulo (M) del engrane es la característica de magnitud, que se tiene en la relación entre la medida del diámetro primitivo, expresado en milímetros y el número de dientes del engrane. El valor del módulo se fija mediante cálculo de resistencia de materiales en virtud de la potencia a transmitir y en función de la relación de transmisión que se establece, esta normalizado en base a la siguiente tabla que relaciona el numero de dientes del engrane.[3]
Tabla 2.1 Relación entre el numero de dientes y el módulo de un engrane 2.3.1.3 DIÁMETRO PRIMITIVO
19
Capítulo 2 Diámetro primitivo: ……… (1)Con la cual se obtiene un diámetro primitivo igual a 9.6 cm donde (Z) es igual al número de dientes que son 24 y el módulo (M) es obtenido de la tabla 2.1 igual a 4, de tal manera que obtenemos.
2.3.1.4 PASO CIRCULAR
El paso circular (Pc) es la longitud de la circunferencia primitiva correspondiente a un diente y un vano consecutivos es a dimensional y viene dado en base a la siguiente formula. ………...………. (2)
De lo cual se obtiene
2.3.1.5 ESPESOR DEL DIENTE
El espesor de diente (S) es el grosor del diente en la zona de contacto, es decir la zona del diámetro primitivo que viene dado bajo la siguiente expresión.
Grueso del diente: ………..………...………... (3)
Donde y se obtiene
2.3.1.6 DIÁMETRO EXTERIOR
El diámetro exterior (Dc) es el diámetro de la circunferencia que limita la parte exterior del engranaje y está dado bajo la siguiente expresión.
……….………. (4)
20
Capítulo 2 2.3.1.7 DIÁMETRO INTERIOREl diámetro interior (Di) es el diámetro de la circunferencia que limita el pie del diente y está dado bajo la siguiente expresión.
……….…………. (5)
Donde ya es sabido que se obtiene
2.3.1.8 PIE DEL DIENTE
El pie de diente también es conocido con el nombre de dedendum y es la parte del diente comprendida entre la circunferencia interior y la circunferencia primitiva el cual estado bajo la siguiente expresión.
Pie del diente: ………..… (6)
Por lo tanto; el pie de diente será de 5
2.3.1.9 ALTURA DEL DIENTE
La altura del diente es la suma de la altura de la cabeza (adendum) más la altura del pie (dedendum) y es el producto del módulo y 2.25 unidades predefinidas.
Altura del diente: ……….… …… (7)
Y por lo tanto se obtiene Altura del diente =
2.3.1.10 DIÁMETRO PITCH
El diámetro pitch (Pt) para el engrane dado en el proyecto, es igual al número de dientes por pulgada en el diámetro primitivo.[4] La relación entre el diámetro Pitch y el módulo es;
………...………..……… (8)
21
Capítulo 2 2.4.1 MECANISMO PIÑÓN-CREMALLERAEl mecanismo piñón-cremallera tiene por finalidad la transformación de un movimiento de rotación o circular (piñón) en un movimiento rectilíneo (cremallera) o viceversa. Este mecanismo como su mismo nombre indica está formado por dos elementos componentes que son el piñón y la cremallera.
El piñón es una rueda dentada normalmente con forma cilíndrica que describe un movimiento de rotación alrededor de su eje.
La cremallera es una pieza dentada que describe un movimiento rectilíneo en uno u otro sentido según la rotación del piñón.
El mecanismo piñón-cremallera funciona como un engranaje simple, esto significa que tanto la cremallera como el piñón han de tener el mismo paso circular y, en consecuencia, el mismo módulo el siguiente mecanismo fue propuesto para el deslice de dicha plataforma adelante y atrás para el ajuste del asiento a la estatura del usuario.[3]
Fig. 2.11 Características del piñón y cremallera utilizadas en el proyecto 2.4.1.1 VELOCIDAD DE UNA CREMALLERA
22
Capítulo 2 DondeY se considera que el motor de la cremallera gira a 40 N-m y su potencia es de 181 watts especificado en el capítulo 2.4 y que se tiene una velocidad angular de.
A continuación se iguala la velocidad de la línea de paso del piñón con la velocidad lineal de la cremallera
2.5.1 TORNILLO SIN FIN
Es un mecanismo diseñado para transmitir grandes esfuerzos, que también se utiliza como reductor de velocidad aumentando la potencia de transmisión. Generalmente trabaja en ejes que se cruzan a 90º.
El número de entradas de un tornillo sin fin suele ser de una a ocho. Los datos de cálculo de estos engranajes están en prontuarios de mecanizado.
Normalmente el contacto entre los dientes del tornillo sin fin y los de la corona ocurre en un solo punto, es decir, en una superficie muy reducida de metal. Por tanto, cuando la fuerza a transmitir es elevada se genera una fuerte presión en el punto de contacto sus características vienen dados bajo las siguientes formulas y con las cuales obtenemos:[4]
Paso
……… (10)
23
Capítulo 2 Módulo……….……….………..
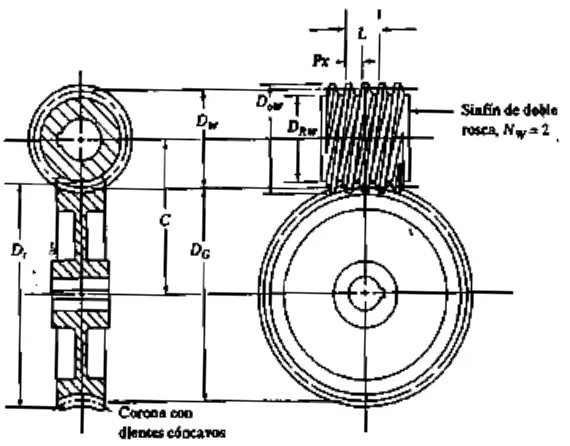
(11)El diámetro primitivo del sin fin es de 2”= 5.08 cm como medida predefinida en el diseño Diámetro exterior …….….…….….………..….… (12)
Diámetro interior ………...……….. (13)
[image:24.612.194.479.398.621.2]
La fig. 2.13 hace relación a las características del tornillo sin fin utilizado en el proyecto como su diámetro primitivo, Diámetro exterior y diámetro interior.
24
Capítulo 2 Una vez obtenidos los parámetros de los engranes, se usa el programa salid Works para diseñar los mecanismos y construirlos para la simulación del prototipo.Los engranes construidos en el programa se en listan a continuación.
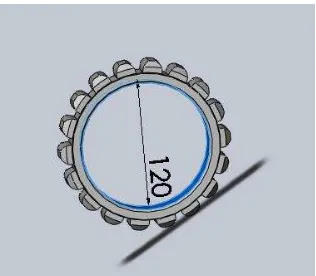
De la figura 2.13 a) hasta la figura 2.13 d) se describe el diseño del engrane, el cual va ir acoplado en la flecha, su funcion va a ser que la flecha gire con la ayuda de un sinfín y un motor.
Fig. 2.13 a) Diametro interno Fig 2.13 b) Diametro externo y grados del corte de dientes
[image:25.612.116.274.251.389.2]25
Capítulo 2 De la figura 2.14 a) y 2.14 b) describe el diseño del tornillo sin fin, este adapta al motor acoplando al engrane que haran mover la flecha.
Fig. 2.14 a) Largo del tornillo Fig. 2.14 b) Corte en espiral para la cuerda
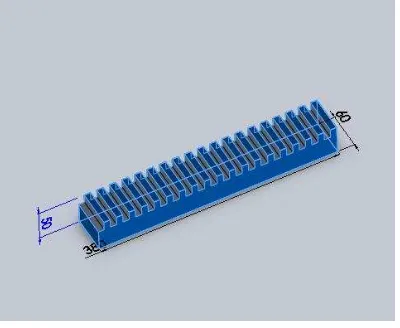
De la figura 2.15 a) hasta la figura 2.15 c) se describe el tipo de cremallera usada la cual se elaboro en el programa de solid works para poder hacer el ensamble de la plataforma.
Fig. 2.15 a) Largo, ancho y espesor Fig. 2.15 b) Numero de dientes y
[image:26.612.87.287.412.576.2]26
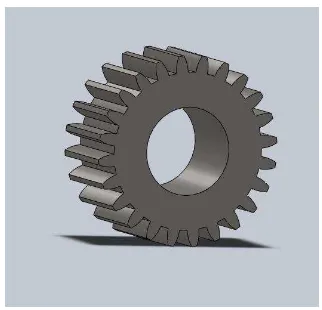
Capítulo 2 Fig.2.15 c) Pieza terminada en Solid WorksEn La fig. 2.16 se muestra el segundo engrane el cual va a trabajar junto con la cremallera.
Fig. 2.16 Engrane de la cremallera
2.5 SELECCIÓN DEL LOS MOTORES
[image:27.612.225.386.377.532.2]27
Capítulo 2 2.5.1 POTENCIA MECÁNICAEs la potencia transmitida mediante la acción de fuerzas de los elementos mecánicos, (engranajes. De acuerdo con la mecánica clásica, el trabajo neto realizado sobre la partícula es igual a la variación de su energía cinética (energía de movimiento), por lo que la potencia desarrollada por la fuerza es:[4]
………(14)
Donde:
P Es la masa de la partícula.
F Es la fuerza resultante que actúa sobre la partícula. V es la velocidad de la partícula.
La distancia que recorrerá el asiento en el giro es calculada en base a los datos obtenidos del anexo de la página 60.
El radio se obtiene del centro del asiento hacia la parte externa de la puerta H significa la distancia en metros que recorrerá el asiento en el giro y se obtuvo de la sig. Forma.
……….
..
………
(15)
En base a esto se puede determinar la velocidad del giro del asiento estimando un tiempo de 15 a 20 ser para el giro del asiento obtenemos
= 0.028 m/s
……… (16)
Y para el cálculo de la potencia del motor en kg m/s se tiene que 1 W equivale a 0.102 kgf m/s, el peso a soportar en el asiento es de 100 kg aprox. Si tenemos que P = F * V y F=M*g
28
Capítulo 2 La distancia de la cremallera es de 47.5 cm y se aproxima que esta corra en un tiempo aproximado de 2 a 3 seg por lo tanto la velocidad será de.En este caso la gravedad es despreciable para el eje x de tal forma que obtenemos lo siguiente:
2.5.2 PAR DEL MOTOR
El par del motor es definido como el momento de fuerza que ejerce sobre el eje de transmisión.
La potencia desarrollada por el par es proporcional a la velocidad angular del eje de viniendo dada por:
……….………. (17)
Donde: P = potencia en watts
M = Es el par del motor en N·m = velocidad angular en rad/s
Mediante esta fórmula tenemos que la velocidad angular en los motores es de
= para el primer motor
= para el segundo motor
29
Capítulo 2 2.5.3 MOTORES DEL PROYECTOYa realizados los cálculos se seleccionan los siguientes motores en base a los parámetros obtenidos.[7]
Fig. 2.17 Motor seleccionado para la plataforma En la tabla 2.2 se muestran los datos técnicos del motor de la plataforma.
DATOS TÉCNICOS
NÚM. DE PARTE 3 137 230 006
VOLTAJE NOMINAL VN 12 V
POTENCIA NOMINAL PN 274 WATTS
CORRIENTE NOMINAL IN 30 A
VELOCIDAD NOMINAL VN 2400 MIN-1
PAR T 105 N.M
ROTACIÓN ADELANTE-REVERSIBLE
PROTECCIÓN IP 03
Tabla 2.2 Datos tecnicos del motor
La fig 2.18 muestra las dimensiones del motor de la plataforma en milimetros.
La figura
30
Capítulo 2 La fig 2.19 Muestra el motor seleccionado para la cremallera.[7]Fig.2.19 Motor seleccionado para la cremallera La tabla 2.3 muestra los datos técnicos del motor de la cremallera
[image:31.612.259.357.145.253.2]Tabla 2.3 Datos técnicos del motor de la cremallera La fig 2.20 muestra las dimensiones del motor de la cremallera en milímetros
Fig. 2.20. Dimensiones del motor de la cremallera en milímetros DATOS TÉCNICOS
NÚM. DE PARTE 3 137 277 744
VOLTAJE NOMINAL VN 12 V
POTENCIA NOMINAL PN 181 WATTS
CORRIENTE NOMINAL IN 20 A
VELOCIDAD NOMINAL VN 2000 MIN-1
PAR T50 N.M
ROTACIÓN REVERSIBLE
31
Capítulo 2 2.6 INTEGRACION DEL SISTEMA MECÁNICOUna vez que se explico el diseño y funcionamiento de cada una de las piezas que integraran la plataforma, la integracion de dichas piezas se hara en el programa SolidWorks para tener un mejor ensamble.
[image:32.612.86.529.236.620.2]En la fig.2.22 se muestran todas las piezas a ensamblar, las cuales se elavoraron en el SolidWorks, se realizara llevando un orden.
32
Capítulo 2 En la figura 2.23 se observa el orden de ensamble que se llevo acabo, de esta forma de esta forma se aemara al momento de adaptarse al automovil, el orden va de abajo hacia arriba.Fig. 2.22 Orden de ensamble
De la figura 2.24 a) hasta la figura 2.24 d) se muestra como quedara la plataforma ya ensamblada.
[image:33.612.327.517.505.673.2]33
Capítulo 2 Fig. 2.24 c) Vista desde arriba Fig. 2.24 d) Vista desde abajo2.6.1 SIMULACIÓN DEL FUNCIONAMIENTO DE LA PLATAFORMA
La parte de la simulación consiste en hacer una representación paso a paso del funcionamiento que realizara la plataforma una vez implementada en el vehículo.
De la figura 2.25 a) hasta la figura 2.25 g) se muestra paso a paso el funcionamiento de la plataforma, el cual es de la siguiente forma: la plataforma estando en su posición normal da un giro de 90° a la derecha, una vez terminando de hacer el giro el asiento saldrá de 10 a 20 centímetros, después el asiento regresara a su lugar, una vez haciendo esto, la plataforma dará un giro de 90° ala izquierda hasta llegar a la posición inicial, de esta manera terminara el trayecto programado.
[image:34.612.312.479.112.279.2]34
Capítulo 2 Fig. 2.25 c) Fin del giro de 90° Fig. 2.25 d) El asiento sele de 10 a 20 cmFig. 2.25 e) El asiento regresa a Fig. 2.25 f) Giro de 90° ala izquierda la posición inicial
[image:35.612.326.495.86.257.2] [image:35.612.87.253.86.249.2] [image:35.612.336.494.314.456.2] [image:35.612.237.379.519.670.2]35
Capítulo 3 CAPÍTULO 3DESCRIPCIÓN DEL SISTEMA ELECTRÓNICO
Se maneja un motor de corriente directa, tiene dos entradas lógicas A y B, y dos salidas denominadas también A y B. Si la entrada A es alta, entonces la salida A también será alta y el motor gira en un sentido. Ahora, si la entrada B es alta, la salida B es alta y el motor gira en sentido contrario. Si las dos entradas son bajas, el motor no opera y no existe consumo de potencia alguno. Por el contrario, si las dos entradas son altas, el motor entra en corto pero no sufre daño alguno, ya que esto se hace para producir un efecto de frenado del motor. Esto solo se hace por un corto tiempo.[6]
[image:36.612.141.454.307.532.2]En la fig.3 se muestra el diagrama electrónico del convertidor de CD-CD.
Fig. 3.1 Diagrama electrónico.
La tabla 3.1 Muestra las nomenclaturas de los componentes del convertidor
NOMENCLATURA NOMBRE
B BOBINA
D DIODO
NC NORMALMENTE CERRADO
NA NORMALMENTE ABIERTO
TR TRANSISTOR
R RESISTENCIA
Q ALIMENTACIÓN DEL RELEVADOR LÓGICO
36
Capítulo 3 Tabla 3.1 Nomenclaturas y nombres de los componentes del convertidor CD-CD.3.1 CONVERTIDOR DE CD-CD
Su función depende de los pulsos que este reciba del relevador lógico, ya que al momento de energizar sus bobinas inicia la secuencia del motor, por medio de los contactos que tiene el relevador, esta es la forma en que trabaja el convertidor de CD-CD.[6]
3.1.1 EL TRABAJO DEL CONVERTIDOR DE CD-CD TRABAJA DE LA SIGUIENTE MANERA
Recibe una tensión de 12 volts del relevador lógico, el cual llega a una resistencia de 28.25 kΩ esta disminuye la tensión para polarizar la base de un transistor con una matrícula, BC-548, este transistor entra en saturación, su operación es la de un interruptor, ya que el colector del transistor es alimentado por 12 volts al trabajar. El transistor como interruptor envía por medio del emisor, una tensión de 11.6 volts al embobinado que tiene el relé, la bobina al momento se energiza creando un campo magnético con el cual se activan los contactos internos. Haciendo que el contacto, normalmente cerrado se abra y el normalmente abierto se cierre. Al momento de que el contacto se cierre este mantiene una tensión de 12 volts hacia uno de los polos del motor el cual comienza a girar ya sea hacia la derecha o la izquierda de acuerdo a la configuración del convertidor de CD-CD y a la lógica que este mandando el relevador lógico.
Los cálculos para hacer trabajar al transistor como interruptor se muestran a continuación:
Calculo de la corriente consumida por la bobina del relé.
Se escoge la β del transistor, en este caso se utiliza la más mínima ganancia, la cual es de 100 para que el transistor se sature. Con esto se calculó la Ib.
37
Capítulo 3 Otro de los componentes importantes es la resistencia de base la cual a continuación se calcula.La cual se obtiene de la siguiente forma.
La resistencia de base es de 28.2 KΩ, y el valor más próximo que existe es de 28.7 kΩ.
De esta forma se hizo trabajar al transistor, en su etapa de saturación la cual permite, que trabaje como interruptor.
3.2 OPERACIÓN DEL ASIENTO
En la tabla 3.2 se da la función de los dispositivos de entrada y salida que forman parte del asiento.
DIRECCIONAMIENTO NOMENCLATURA DESCRIPCIÓN
I1 S1 INICIO DE GIRO HACIA LA DERECHA
I2 S2 TERMINO DE GIRO HACIA LA DERECHA
I3 S3 INICIO DE GIRO HACIA LA IZQUIERDA
I4 S4 TERMINO DE GIRO HACIA LA IZQUIERDA
I5 S5 INICIO DE TRASLADO HACIA ADELANTE
I6 S6 INICIO DE TRASLADO HACIA ATRÁS
Q1 TR1 SALIDA HACIA EL CONVERTIDOR 1
Q2 TR2 SALIDA HACIA EL CONVERTIDOR 1
Q3 TR1 SALIDA HACIA EL CONVERTIDOR 2
Q4 TR2 SALIDA HACIA EL CONVERTIDOR 2
Tabla 3.2 Función de los dispositivos de entrada y salida
38
Capítulo 3 Fig. 3.2 Esquema simplificado del giro del primer motorSe explica brevemente como se activa, la operación del asiento.
Para que el asiento gire hacia la derecha deben estar energizados I1 e I2 para que estos manden un tensión de 12 Vcc a la salida Q1, la cual está configurada en el transistor TR1 que va en el convertidor de CD-CD 1.
Para realizar la inversión de giro se des energiza I2 e I1, y a su vez se energiza I3 e I4 las cuales mandan una tensión de 12 Vcc a la salida Q2, la cual se encarga de enviar un pulso al transistor TR2 que va al convertidor 1, con el cual se genera el giro hacia la izquierda, haciendo que el asiento regrese a su posición original.
En la siguiente fig. 3.2.1 se observa el esquema del segundo motor que realiza la función de mover el asiento hacia adelante y hacia atrás.
Fig. 3.3 Esquema simplificado del giro del segundo motor.
39
Capítulo 3 Para protección del usuario o mal funcionamiento del sistema se implementa un paro de emergencia, el cual va a detener la secuencia de la plataforma.3.3 CONTROL DE INVERSIÓN DE GIRO DE LOS MOTORES
Aquí se explica más a detalle el giro de los motores, tomando como referencia las figuras 3.2 y 3.3.
Paso 1- Giro hacia la derecha (sin persona a bordo):
Este se efectúa por medio de un micro interruptor S1, el cual manda un pulso al relevador electrónico, que a su vez envía otro pulso a una resistencia, para que energice la base de un transistor TR1 y energice la bobina del relevador (convertidor de CD-CD 1) y así se realice el giro, de 90° con el cual el asiento quedara con la parte frontal hacia afuera, para detener este ciclo se incorpora un interruptor conocido como final de carrera S2 el cual manda des energizar al relevador y por consecuencia al motor.
Paso 2-Giro hacia la izquierda (con persona a bordo):
Para este retroceso (giro inverso) se utiliza un micro interruptor S3 el cual es unipolar, este va a estar instalado en el cinturón de seguridad, para que al momento de cerrar el cinturón, se inicie el ciclo, mandando el pulso al relevador lógico para que alimente al TR2 convertidor 1.
Su ciclo va a terminar también, con un interruptor de final de carrera S4, para cerrar el ciclo y la persona se encuentre dentro del vehiculó sin ningún problema.
Paso 3.-Giro hacia la derecha (persona a bordo):
Este es activado por medio del cinturón como ya que, al desactivar el cinturón el mini interruptor S1 realiza el inicio de ciclo, llegando al interruptor final de carrera S2 y se finaliza el ciclo.
Paso 4.-Giro hacia la izquierda (sin persona a bordo):
Como en el retroceso de la segunda parte, hace la misma secuencia, se activa el mini interruptor S3 para iniciar el ciclo hasta terminar el ciclo con el final de carrera S4 para así tener las 4 secuencias del asiento.
40
Capítulo 3 tiros, el cual es unipolar y será de forma manual, alimentando al relevador lógico para que este pulse al convertidor 2 y con esto el asiento se recorra hacia adelante por medio de S5 y hacia atrás Por medio de S6, en forma bidireccional.3.4 SELECCIÓN DE LOS INTERRUPTORES DE LÍMITE.
Un interruptor eléctrico es un dispositivo utilizado para desviar o interrumpir el curso de una corriente eléctrica. En el mundo moderno las aplicaciones son innumerables, van desde un simple interruptor que apaga o enciende un bombillo, hasta un complicado selector de transferencia automático de múltiples capas controlado por computadora.
Su expresión más sencilla consiste en dos contactos de metal inoxidable y el actuante. Los contactos, normalmente separados, se unen para permitir que la corriente circule. El actuante es la parte móvil que en una de sus posiciones hace presión sobre los contactos para mantenerlos unidos.
Ahora se muestra el min interruptor S1 y S3, que se va a utilizar, este es unipolar ya que es normalmente cerrado hacia un polo y normalmente abierto hacia el otro. Este se observa en la fig. 3.4.
Fig. 3.4 Mini interruptor unipolar normalmente cerrado u abierto
41
Capítulo 3 Fig. 3.5 interruptor final de carrera normalmente cerradoLa fig. 3.6 muestra un interruptor S5 y S6 que es de un polo tres tiros el cual se ocupa para realizar el adelanto y el atraso del asiento.
Fig. 3.6 Interruptor manual de un polo tres tiros
3.5 SELECCIÓN DEL RELEVADOR LÓGICO
La lógica de relé es un control electrónico con funciones como son, temporizador, contador y las funciones de interruptor de tiempo. También es un dispositivo de control y de entrada en uno. Con la lógica relé se pueden crear soluciones para los usos domésticos así como para las tareas en la construcción de máquinas e instalaciones. Los circuitos están conectados mediante diagramas de escalera, y cada elemento se introduce directamente a través de la pantalla LCD.
3.5.1 FUNCIONAMIENTO DEL RELEVADOR LÓGICO
42
Capítulo 3 compuertas internas (digitales) las cuales van a ser activadas por los, mini interruptores, interruptores de final de carrera y los interruptores manuales.[image:43.612.229.383.189.311.2]
En la fig. 3.7. Se observa el relevador.
Fig. 3.7. Vista física del relevador lógico 3.5.2 CONEXIÓN DEL RELEVADOR LÓGICO.
Se observa la configuración, con la cual se va a alimentar el relevador y también como se van a, energizar las entradas del mismo esto en base a los interruptores que se van, a utilizar.
El cableado que se utiliza para la conexión de los interruptores, es de un bajo calibre el cual es flexible para que no interrumpa las secuencias de giro, el interruptor que se va a conectar se instala en la parte interior del clip del cinturón de seguridad, los finales de
Carrera se instalan uno en la parte frontal de la plataforma y el otro en el lado derecho de la misma, esta configuración es para el giro del asiento.
Para el retroceso, el interruptor se instala en la parte lateral derecha de la plataforma.
43
Capítulo 3 Fig. 3.8 Alambrado del relevador lógico.Como se puede observar en la fig. 3.8 las conexiones de entrada están alimentadas por medio de interruptores normalmente abiertos y cerrados en cuestión de las salidas, van configuradas cada una dirigidas hacia un transistor con el cual van a realizar la secuencia de giro y de adelanto y atraso.
3.6 PROGRAMACIÓN.
El software que se utilizó es el CL logotrón.
44
Capítulo 3 del asiento y las dos restantes son para el adelanto y atraso del mismo.En la tabla 3.6 se explica la secuencia lógica con la que se programa el controlador de acuerdo a los pulsos uno y ceros enviados por los interruptores.
Cuando la secuencia en el relevador sea I3=1 e I4=1 el asiento girar hacia el lado derecho sin que la persona este a bordo.
Una vez que la persona esté en el asiento se activara con la configuración de I1=1 e I2=1.
Así mismo para que salga la persona del auto la secuencia será la misma que se utilizó cuando el asiento estaba desocupado, para hacer que el asiento vuelva a su estado original se usa la secuencia dos para que el giro sea hacia la izquierda y se muestra en la tabla 3.3
ESTADO I1 I2 I3 I4 Q FUNCIÓN
SIN PERSONA A
BORDO
0 0 1 1 1 GIRA 90°
HACIA LA DERECHA CON
PERSONA A BORDO
1 1 0 0 2 GIRA 90°
HACIA LA IZQUIERDA CON
PERSONA A BORDO
0 0 1 1 1 GIRA 90°
HACIA LA DERECHA SIN
PERSONA A BORDO
1 1 0 0 2 GIRA 90°
HACIA LA IZQUIERDA
Tabla 3.3 lógica de giro.
En la tabla 3.4 se describe la secuencia que realiza el deslizamiento del asiento hacia adelante y hacia atrás.
En esta tabla solo se hará una secuencia hacia adelante y hacia atrás de acuerdo a la siguiente configuración la cual es: I5=1 y I6=0 para que el asiento se deslice hacia el frente, I6=1 y I5=0 para que el asiento retroceda.
ESTADO I5 I6 Q FUNCIÓN
45
Capítulo 3CON O SIN PERSONA
0 1 4 DESLIZAMIENTO HACIA
[image:46.612.79.569.216.623.2]ATRÁS
Tabla 3.4 lógica de deslizamiento.
En la fig. 3.9 Se muestra la programación realizada por medio del software.
46
Capítulo 4 RELACIÓN DE COSTOS DEL PROYECTOAntes de iniciar con detalle la etapa de costos del proyecto es necesario realizar un estudio de pre factibilidad el cual consiste en una breve investigación sobre las diferentes técnicas de producir el bien o servicio bajo estudio y las posibilidades de adaptarlas a la sociedad. Además se debe analizar las disponibilidad de los principales insumos que requiere el proyecto y realizar un sondeo de mercado que refleje en forma aproximada las posibilidades del proyecto, en lo concerniente a su aceptación por parte de los futuros usuarios y su forma de distribución.
4.1 ESTUDIO DE PRE FACTIBILIDAD
Se lleva a cabo con el objetivo de contar con información sobre el proyecto a realizar, mostrando las alternativas que se tienen y las condiciones que rodean al proyecto. Este estudio de pre factibilidad se compone de:
Estudio tecnológico
Suministros
Estudio financiero
4.1.1 ESTUDIO TECNOLÓGICO.
Este estudio tiene por objeto proveer información para cuantificar el monto de las inversiones y los costos de operación pertinentes a esta área. Normalmente se estima que deben aplicarse los procedimientos y las tecnologías más modernas, solución que puede ser óptima de manera técnica, pero no desde una perspectiva financiera. Uno de los resultados de este estudio será definir la función de producción del bien o necesidades del capital, mano de obra y recursos materiales, tanto en la puesta en marcha como para la posterior operación del proyecto.
El estudio tecnológico debe servir para encontrar la mejor forma de lograr la producción del bien o servicio, e incluir la ingeniería básica y la ingeniería de detalle.
4.1.2 SUMINISTROS.
47
Capítulo 4 Es la sistematización de la información financiera consiste en identificar y ordenar todoslos ítems de inversiones, costos e ingresos que implique dicho proyecto, en esta etapa deben
definirse todos aquellos elementos que debe suministrar el propio estudio financiero. El
caso clásico es el cálculo del monto que debe invertirse en capital de trabajo o el valor de
desecho del proyecto.
En la siguiente tabla se muestran los costos del proyecto así como la inversión realizada en
la etapa de ingeniería.
CANTIDAD DISPOSITIVO COSTO
UNITARIO
TOTAL
10 TRANSISTOR NPN $ 50 $500
10 REGULADOR 7
VOLTS $ 25 $250
10 DIODOS $ 15 $150
8 RELÉ $ 30 $240
1 RELEVADOR
ELECTRÓNICO $2500 $2500
1 SOFTWARE $1500 $1500
1 CABLE DE DATOS $1500 $1500
6 INTERRUPTORES
DE FIN DE CARRERA
$ 15 $90
6 INTERRUPTORES
ON-OFF
$5 $30
1 LAMINA ACERO GALVANIZADO CAL
16 (4'X 8')
$175.00 $175.00
TORNILLERÍA $300 $300
1 CREMALLERA 50
CM $180 $180
1 ENGRANE CÓNICO
RECTO 4 PULGADAS DE DIÁMETRO
$192 $192
1 VARILLA ACERO
AL CARBONO 1 M $135 $135
1 MOTOR BOSH
BOSH GBM-M 12 VCD.
$275 $275
1 MOTOR BOSH
BOSH GBM-M
$270 $270
SUBTOTAL $8287.00
48
Capítulo 4 Tabla 4.2. Costos de personalCOSTOS DEL PERSONAL $ 42,340.00
COSTO DE LOS MATERIALES $ 8287.00
COSTO TOTAL DEL PROYECTO $ 50,627.00
Tabla 4.3. Costo total del proyecto.
Cabe mencionar que el costo total fue en base al proyecto el cual incluye la etapa de investigación y el desarrollo de un prototipo; una vez realizando la producción, dependiendo de la demanda el costo disminuirá.
TRABAJAR POR HORA FINAL
INGENIERO EN
CONTROL CONTROL A IMPLEMENTAR DISEÑAR SISTEMA DE 25 $ 500.00 $12,500.00
INGENIERO
MECÁNICO BOSQUEJO DEL PROTOTIPO 30 $ 500.00 $15,000.00
TÉCNICO EN ELECTRÓNICA
HACER DISEÑO ELECTRÓNICO
DEL SISTEMA 15 $ 300.00 $4500.00
TÉCNICO MÁQUINA Y HERRAMIENTAS
ENCARGADO DE ENSAMBLAR LAS PIEZAS Y ARMAR EL
SISTEMA 15 $ 300.00 $4500.00
SOLDADOR SOLDADOR CON SOPLETE O
ARCO ELÉCTRICO 5 $ 100.00 $500.00
. SUB TOTAL $ $36,500.00
POR GASTOS INDIRECTOS CONTEMPLANDO: INSTALACIÓN
HERRAMIENTA, ETC. +16%
CUARENTA Y DOS MIL TRECIENTOS CUARENTA PESOS. M.N. 00/100
TOTAL
49
Capítulo 5 CAPITULO 5CONCLUSIONES
La idea principal en el diseño de esta plataforma, es la de poder auxiliar a las personas discapacitadas, en el ingreso y descenso de su vehículo, También se logra disminuir los riesgos de lesiones tanto, para las personas con los siguientes problemas como son: falta de una extremidad inferior o incluso las dos, también en las extremidades superiores, sin pasar por alto a las de movilidad reducida y a los que van a auxiliarlos en el traslado.
Ya incorporada al automóvil se enfocó en el sistema de control este, está basado en las capacidades de cada persona, por la forma en la que se configura las conexiones es más accesible su funcionamiento, de acuerdo a lo establecido se diseñaron, las piezas una vez terminadas se realizó el ensamble, para realizar la implementación hacia el asiento del automóvil.
La configuración del giro del asiento por medio de las entradas y salidas de un relevador electrónico, con un diseño de circuito no muy robusta para que no interfiera con la operación del asiento y el usuario no corra algún riesgo al momento de ocuparlo.
También se logró realizar el diseño para poder, implementarlo en un automóvil de bajo costo esto, es para que lo integren en taxis, de preferencia el Tsuru ya que no es un automóvil muy caro y su consumo es bajo en forma general.
La forma para poder realizar este diseño fue, gracias a los diferentes software que ocuparon, tanto para el diseño y maquinado de piezas el programa utilizado fue el Solid Works, para poder realizar el diagrama del convertidor de CD-CD es el multisim con el cual se, diseño el circuito, y la lógica de control este fue diseñado con el programa, del relevador es el CL logotron.
También los cálculos realizados, para la obtención de las medidas y las características de los materiales por la parte del diseño, ya en la parte electrónica los cálculos para identificar el motor y el convertidor.
Con esto se logra cumplir con las expectativas para la realización de la plataforma del asiento de automóvil ayudando a una parte de la población con recursos limitados, para que puedan desarrollarse mejor en este mundo donde, hasta la fecha siguen siendo discriminados.
Implementaciones futuras
50
Capítulo 5 CONAPRED: Consejo nacional para prevenir la discriminación.Coplanariedad: Geométricamente se define como coplanares a los puntos que se encuentran en un mismo plano.
Esgrimen: Usar una cosa no material para atacar o defenderse o para lograr alguna cosa. Prontuarios: Resumen en que se anotan varias cosas a fin de tenerlas presentes cuando se necesiten.
Addendum: Es aquello que se adhiere o añade a algo. Si es una sola la adición es addendum, y si son varias, el mencionado plural es adenda.
Adimensional: Es un número que no tiene unidades físicas que lo definan y por lo tanto es un número puro. Los números adimensionales se definen como productos o cocientes de cantidades que sí tienen unidades de tal forma que todas éstas se simplifican. Dependiendo de su valor estos números tienen un significado físico que caracteriza unas determinadas propiedades para algunos sistemas.
Newton metro (N.m): es una unidad de medida de esfuerzo de torsión (también llamado "momento") en el sistema SI. La forma simbólica es N m o N·m,1 y a veces newton-metro.
Bipolar: Tipo de circuito integrado en donde los componentes son transistores bipolares y otros dispositivos siguiendo las propiedades de unión p-n de los semiconductores. Los circuitos bipolares presentan velocidad y operación superiores a los circuitos MOS, pero consumen más energía y su fabricación es más compleja.
Bobina: Conjunto de un número variable de espiras de material conductor arrolladas al aire o a un núcleo prismático o cilíndrico. Se utilizan principalmente en circuitos de corrientes alternas de alta tensión al aprovechar los fenómenos de inducción.
Conmutadores: Pieza de los aparatos eléctricos que cambia de conductor a una corriente eléctrica. Aparato que centraliza las llamadas telefónicas. Circuito que transforma una magnitud en otra distinta de la misma naturaleza eléctrica, manteniendo una relación de proporcionalidad con la primera. Es cualquier dispositivo que transforma una corriente mono o polifásica, de una determinada frecuencia, en otra corriente continua o bien alterna, de distinto número de fases o distinta frecuencia.
51
Capítulo 5 Corriente eléctrica: Es el flujo de carga por unidad de tiempo que recorre un material. Se debe a un movimiento de los electrones en el interior del material. En el Sistema Internacional de Unidades se expresa en C/s (culombios sobre segundo), unidad que se denomina amperio.Bianual: Lo que se realiza sistemáticamente cada dos años.
Electroimán: Un electroimán es un tipo de imán en el que el campo magnético se produce mediante el flujo de una corriente eléctrica, desapareciendo en cuanto cesa dicha corriente. Es producido mediante el contacto de dos metales; uno en estado neutro y otro hecho por cables e inducido en electricidad.
Enclavamiento: Sistema que por medios mecánicos y/o eléctricos, relaciona la posición de los cambios con la indicación de los semáforos, de manera tal que se cumpla una relación.
Escobillas: En electricidad, frecuentemente es necesario establecer una conexión eléctrica entre una parte fija y una parte rotatoria en un dispositivo. Es el caso de los motores o generadores eléctricos, donde hay que establecer una conexión de la parte fija de la máquina con las bobinas del rotor.
Plataforma: Estructura construida sobre la explanación, que sustenta la vía y los elementos destinados al funcionamiento de los trenes.
Relevador: Este dispositivo electromagnético permite abrir o cerrar uno o varios
interruptores simultáneamente aplicándole una corriente débil que activa un electroimán y cambia el estado de los interruptores de abiertos a cerrados o viceversa.
Secuencia: Una secuencia es una concatenación de símbolos obtenidos a partir de una sucesión. Son semejantes a las sucesiones y se pueden derivar fácilmente de éstas.
52
Capítulo 5 [1] CONAPRED MEXICOhttp://www.conapred.org.mx/
[2] Ayuda técnica para personas con discapacidad - Clasificación y terminología ISO 9999:2002
http://www.iso.org/iso/catalogue_detail.htm?csnumber=33150
[3] Diseño de elementos de maquinas
Robert l. Mott p.e
Editorial M.C. Grall Hill
[4] Diseño en ing. Mecánica de shigley
Richard G. Budynas
Editorial Mc Graw hill
[5] Dispositivos Electrónicos
Thomas L. Floyd
Editorial Pearson Educación
[6] Teoría de circuitos y dispositivos electrónicos
Robert L. Boylestad
Editorial Pearson Educación
[7] Catálogo de motores Bosh Data sheet y características
53
Capítulo 5 ANEXOSCOMPONENTES DEL CONVERTIDOR DE CD-CD.
Elementos que conforman el convertidor de CD-CD.
FUNCIONAMIENTO DEL DIODO
El diodo es un componente básico de los circuitos electrónicos. Su funcionamiento se basa en la unión de dos materiales semiconductores, uno de tipo P y otro de tipo N. Recuerda que al terminal que sale del semiconductor de tipo P se le denomina ánodo; y al que sale del semiconductor de tipo N, cátodo.
El diodo se puede emplear para controlar el cual pasa de la corriente eléctrica por un circuito, a modo de interruptor.
Para el uso en la rectificación de uso general de fuentes de alimentación, inversores, convertidores y los diodos de rueda libre solicitud se observa en la fig. 1
Fig. 1 Vista física del diodo.
En la fig. 2 se observan las dimensiones del diodo en pulgadas y centímetros.
Fig. 2 Dimensiones del diodo En la tabla 1 se especifican los rangos máximos de operación.
54
Capítulo 5TENSIÓN MÁXIMA DE RMS VRMS 700 V
MÁXIMA TENSIÓN DE BLOQUEO DE LA DC VDC 1000 V
MÁXIMA CORRIENTE HACIA DELANTE RECTIFICADA
0.375” (9.5 MM) LONGITUD EN PLOMO TA= 75 °C IF (AV.) 1.O A
PICO HACIA DELANTE DE SOBRETENSIÓN 8.3 MS SOLO MEDIA ONDA SUPERPUESTA A LA CARGA NOMINAL.
I FSM 30 A
LA CARGA MÁXIMA TOTAL INVERSA PROMEDIO
ACTUAL, EL CICLO COMPLETO DE 0.375” (9.5 MM) DE
LONGITUD DE PLOMO TL= 75 °C.
IR(AV) 30 mA
FUNCIONAMIENTO DE CONEXIONES Y RANGO DE
TEMPERATURA DE ALMACENAMIENTO. TJ, TSJG -55ª+55 °C
Tabla 1 Rangos máximos de operación
FUNCIONAMIENTO DE UN TRANSISTOR
Los transistores son conmutadores electrónicos en miniatura. Muy similar a un simple interruptor de la luz, un transistor tiene dos posiciones, apagado y encendido. Esto permite el paso de electrones por un lado o por otros según la necesidad. Este pequeño es creado usando tres capas en lugar de dos como tiene el diodo. Para entender cómo funcionan los transistores, es necesario comprender como funciona un circuito electrónico conmutado. Los circuitos electrónicos consisten en varias partes. Una es el camino donde la corriente eléctrica fluye a través del cable. La otra parte es un conmutador que para o inicia el flujo eléctrico abriendo o cortando el recorrido del circuito. Los transistores no tienen partes móviles y se apagan y encienden por señales eléctricas. Estas conmutaciones facilitan el trabajo realizado por los microprocesadores.
El transistor que se va a utilizar es el BC-548 Este dispositivo está diseñado para su uso como amplificadores de propósito general y los interruptores que requieren las corrientes de colector de 300 mA. Se puede observar en la fig. 3
55
Capítulo 5 En la tabla 2 se muestran los máximos rangos absolutos.En esta tabla se observa las tensiones más importantes para saber cómo va a trabajar el transistor y bajo qué condiciones.
SÍMBOLO PARÁMETROS VALORES UNIDAD
VCEO TENSIÓN COLECTOR-EMISOR 30 V
VCES TENSIÓN COLECTOR-BASE 30 V
VEBO TENSIÓN BASE-EMISOR 5.0 V
IC CORRIENTE DE COLECTOR CONTINUA 400 mA
TJ,TSTG RANGO DE OPERACIÓN Y ALMACENAMIENTO
DE CONEXIÓN DE TEMPERATURA
-55 A +150 °C
Tabla 2 Máximos rangos absolutos
FUNCIONAMIENTO DEL RELÉ
El relé o relevador es un dispositivo electromecánico. Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctricos independientes.
Dado que el relé es capaz de controlar un circuito de salida de mayor potencia que el de entrada, puede considerarse, en un amplio sentido, como un amplificador eléctrico. Como tal se emplearon en telegrafía, haciendo la función de repetidores que generaban una nueva señal con corriente procedente de pilas locales a partir de la señal débil recibida por la línea. Se les llamaba "relevadores". De ahí "relé".
El relé que se va a utilizar es de la marca ABB. El cual permite el control de un dispositivo a distancia. No se necesita estar junto al dispositivo para hacerlo funcionar y es activado con poca corriente, sin embargo puede activar grandes máquinas que consumen gran cantidad de corriente el modelo es el CR-P012DC02 como se observa en la fig. 4
56
Capítulo 5 Fig. 5 Medidas del relé y configuración de pines.FUNCIONAMIENTO DE RESISTENCIA
Una resistencia es todo aquel elemento que intercalado en un circuito eléctrico produce un impedimento en el movimiento de los electrones. La resistencia puede ser reactiva o inductiva, es decir producida por impedimentos de tipo físico como impurezas o estrechamiento en el conductor (Reactiva) o por fenómenos electromagnéticos (Inductiva) como en el caso de la corriente alterna atravesando una bobina o inductancia. Según esto, cualquier elemento intercalado en el circuito puede ser considerado una resistencia, ya sea un transistor, un motor, una bombilla o una lavadora.
Esta nos va a permitir la disminución de la tensión y la corriente, para que active ya sea a un transistor. En la fig. 6 Se observa físicamente.
Fig. 6 Vista física de la resistencia.
La vista eléctrica de un componente es importante para poder identificarlo en un diagrama, en la fig. 7 Se observa la resistencia en forma electrónica.