INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL ADOLFO LOPEZ MATEOS
DEPARTAMENTO DE INGENIERIA ELÉCTRICA
DESARROLLO Y SIMULACIÓN DE UN MODELO DE
RELEVADOR DE SOBRECORRIENTE UTILIZANDO UN
PROGRAMA DE TRANSITORIOS ELECTROMAGNETICOS
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENIERO ELECTRICISTA
PRESENTA
EDGAR ADRIÁN MORALES GARCÍA
ASESORES
Dr. GERMAN ROSAS ORTIZ
M. en C. JUAN ABUGABER FRANCIS
DEDICATORIA
Con admiración y respeto…
A mis padres, las personas que han realizado todo en la vida para que yo pudiera lograr mis sueños, por motivarme, aconsejarme y ayudarme en todo momento, a ustedes por siempre mi corazón y mi agradecimiento. A mi hermana, por ser una motivación
en mi vida, recuerda que no hay sueños ni metas imposibles.
El aprendizaje se logra en base a muchas preguntas y de una que otra respuesta, de búsqueda más que de descubrimientos, de dudas más que
AGRADECIMIENTOS
Durante todos estos años he tenido el apoyo incondicional de muchas personas tanto en lo académico como en lo personal, a todos quiero agradecer su tiempo, sus palabras, y su apoyo, para mi fueron de gran utilidad y motivación.
Gracias a mi profesor y asesor técnico el Dr. German Rosas Ortiz, por su apoyo y por brindarme las herramientas para realizar este trabajo. Gracias por su tiempo y sus consejos para hacer de este trabajo lo mejor posible.
Gracias al profesor y asesor M. en C. Juan Abugaber Francis, por el apoyo y consejos brindados para la mejora y la estructura de este trabajo.
Al profesor y miembro del jurado, M. en C. Evaristo Velázquez Cazarez, por la gran enseñanza impartida en el aula de clases, por sus conocimientos compartidos y por su constancia con todos sus alumnos.
A la profesora y miembro del jurado Isabel Albarran Carmona, por los comentarios y sugerencias realizadas para la mejora de este trabajo.
Índice
ÍNDICE
Relación de figuras
Relación de tablas
Nomenclatura Resumen Introducción i vi vii ix x
CAPITULO 1 PROTECCIÓN DE SISTEMAS ELÉCTRICOS
1.1
1.2
Elementos de un sistema de protección.
1.1.1 Relevadores. 1.1.2 Interruptores. 4
1.1.3 Banco de baterías (alimentación de CC).
1.1.4 Transformadores de instrumento. 1.1.4.1 Transformadores de corriente (TC’s) 1.1.4.2 Transformadores de potencial (TP’s).
Principios de operación de los relevadores. 1.2.1 Detección de fallas.
1.2.1.1 Detección de nivel de ajuste.
1.2.1.2 Comparación de magnitud. 1.2.1.3 Comparación diferencial.
1.2.1.4 Comparación de ángulo de fase. 1.2.1.5 Medición de distancia.
1.2.1.6 Contenido armónico.
1.2.2 Funcionamiento de los relevadores de protección. 1.2.2.1 Operación correcta. 1.2.2.2 Operación incorrecta.
CAPITULO 2 MODELO DEL RELEVADOR DE PROTECCION
2.1
2.2
Relevadores numéricos. 2.1.1 Subsistema de entrada analógica. 2.1.1.1 Aislamiento y escalado. 15 2.1.1.2 Filtrado antialiasing. 15
2.1.1.3 Muestra y retención.
2.1.1.4 Convertidor analógico a digital. 2.1.2 Procesamiento digital de señales.
2.1.2.1 Transformada discreta de Fourier.
17 2.1.2.2 Filtro mimic. Relevadores de sobrecorriente. 2.2.1 Relevadores de sobrecorriente de tiempo inverso.
2.2.1.1 Ajuste de disparo y tiempo de retardo. 2.2.1.2 Características de la curva de operación. 2.2.1.3 Ecuación de tiempo-corriente. 2.2.2 Relevador de sobrecorriente direccional.
14 15 16 17 22 24 25 26 27 28
CAPITULO 3 DESARROLLO Y SIMULACION DEL MODELO DE RELEVADOR
3.1 3.2
3.3
3.4
Descripción del software PSCAD.
Desarrollo del relevador de sobrecorriente en PSCAD. 3.2.1 Conversión de las señales analógicas.
3.2.2 Relevador de sobrecorriente instantáneo.
3.2.3 Relevador de sobrecorriente de tiempo inverso. 3.2.4 Relevador de sobrecorriente direccional. 3.2.5 Condiciones de disparo para el relevador.
Descripción de la red eléctrica.
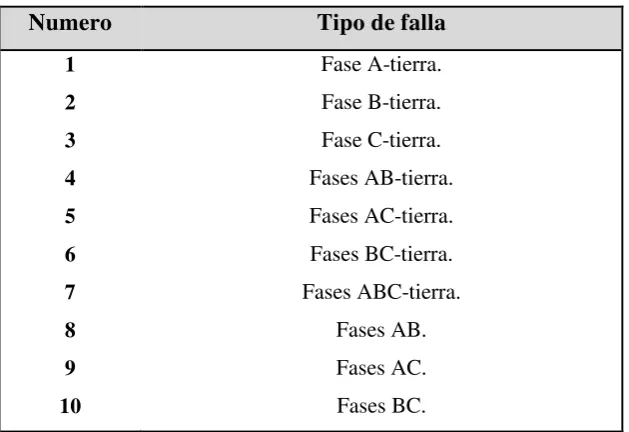
3.3.1 Características de la red eléctrica. 1 3.3.2 Fallas aplicadas a la red.
3.3.3 Conexión de TP`s y TC`s.
Pruebas de operación al relevador de sobrecorriente.
Índice
3.4.2 Obtención de valores fasoriales, magnitud y ángulo. 3.4.3 Prueba del relevador instantáneo y de tiempo inverso. 3.4.4 Prueba del relevador de sobrecorriente direccional.
49 53 55
CAPITULO 4 PRUEBAS Y ANALISIS DE RESULTADOS
4.1
4.2 4.3
Coordinación de relevadores. 4.1.1 Parámetros de la red eléctrica en estado estable. 4.1.2 Niveles de fallas en la red eléctrica. 4.1.3 Ajustes de relevadores. 4.1.4 Operación de los relevadores ante fallas aplicadas a la red. 4.1.4.1 Falla frente al relevador 1. 4.1.4.2 Falla a 10km del relevador 1. 4.1.4.3 Falla a 50km del relevador 1. 4.1.4.4 Falla a 90km del relevador 1. 4.1.4.5 Falla a 100km del relevador 1. Resultados de la coordinación del relevador en la red. Análisis entre los tiempos de operación del relevador en PSCAD con
los establecidos en la norma IEEE C37.112-1996. 56 57 58 60 62 63 65 67 68 71 72
Conclusiones
Bibliografía
Apéndice A
i
RELACIÓN DE FIGURAS
Capítulo 1
FIGURA TITULO PAGINA
Figura 1.1 Figura 1.2 Figura 1.3 Figura 1.4 Figura 1.5
Elementos de un sistema de protección.
Característica de un relevador de sobrecorriente de tiempo definido y tiempo inverso [2].
Comparación de magnitud en dos líneas de transmisión paralelas [2].
Principio de comparación diferencial aplicado al devanado de un generador [2].
Comparación del ángulo de fase en una línea de transmisión [2]. 2 8 9 10 11 Capítulo 2 Figura 2.1 Figura 2.2 Figura 2.3 Figura 2.4 Figura 2.5 Figura 2.6 Figura 2.7
Bloques funcionales de un relevador digital.
Señal seno muestreada a una frecuencia de 720Hz.
Señal coseno muestreada a una frecuencia de 720Hz.
Magnitud del fasor tomando 12 muestras [10].
Aplicación del filtro mimic.
Curvas características de operación del relevador de sobrecorriente de tiempo inverso. Sistema de protección con fuentes en ambos extremos. 14 20 20 21 23 26 28 Capítulo 3 Figura 3.1 Figura 3.2 Figura 3.3 Figura 3.4 Figura 3.5
Modulo del relevador de sobrecorriente creado en PSCAD.
Componentes de comunicación de entrada y salida.
Bloque de la Transformada rápida de Fourier.
Componentes para la simulación del filtro mimic.
Modulo del filtro mimic.
Relación de figuras ii Figura 3.6 Figura 3.7 Figura 3.8 Figura 3.9 Figura 3.10 Figura 3.11 Figura 3.12 Figura 3.13 Figura 3.14 Figura 3.15 Figura 3.16 Figura 3.17 Figura 3.18 Figura 3.19 Figura 3.20 Figura 3.21 Figura 3.22 Figura 3.23 Figura 3.24 Figura 3.25 Figura 3.26 Figura 3.27 Figura 3.28 Figura 3.29 Figura 3.30
A) Comparador, B) Selector y C) Monoestable.
Bloques para la función del relevador instantáneo.
Modulo para el relevador de sobrecorriente instantáneo.
Componentes para la simulación de la ecuación 2.7.
Componentes de retraso de tiempo y disparo.
Modulo del relevador de tiempo inverso.
Componentes para el relevador direccional.
Modulo del relevador direccional.
Falla, atrás y adelante.
Fasores en el sistema.
Detección del ángulo de desfasamiento
Zonas de operación.
Operadores lógicos para condicionar el disparo del relevador.
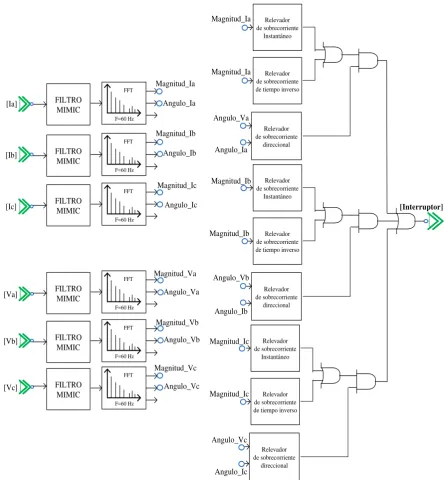
Elementos del relevador de sobrecorriente.
Red eléctrica de prueba.
Panel de control de fallas.
Transformadores de corriente y tensión.
Señal en la entrada del filtro.
Señal de salida del filtro.
Señal de corriente en el lado secundario del TC.
Grafico de fasores de la fase A del relevador de sobrecorriente.
Tiempo de respuesta del relevador a 10km.
Tiempo de respuesta del relevador a 80km.
Tiempo de respuesta del relevador a 90km.
iii Capítulo 4 Figura 4.1 Figura 4.2 Figura 4.3 Figura 4.4 Figura 4.5 Figura 4.6 Figura 4.7 Figura 4.8 Figura 4.9 Figura 4.10 Figura 4.11 Figura 4.12 Figura 4.13 Figura 4.14 Figura 4.15 Figura 4.16 Figura 4.17
Figura 4.18
Red eléctrica y relevadores.
Diagrama de protección de los relevadores.
Localización de las fallas.
Tiempo de operación del relevador 1 para la falla 1 (F1).
Tiempo de operación del relevador 3 para la falla 1 (F1).
Tiempo de operación del relevador 1 para la falla 2 (F2).
Tiempo de operación del relevador 3 para la falla 2 (F2).
Tiempo de operación del relevador 1 para la falla 3 (F3).
Tiempo de operación del relevador 3 para la falla 3 (F3).
Tiempo de operación del relevador 4 para la falla 3 (F3).
Tiempo de operación del relevador 1 para la falla 4 (F4).
Tiempo de operación del relevador 3 para la falla 4 (F4).
Tiempo de operación del relevador 1 para la falla 5 (F5).
Tiempo de operación del relevador 3 para la falla 5 (F5).
Tiempo de operación del relevador 4 para la falla 5 (F5).
Tiempo de operación del relevador 2 para la falla 5 (F5).
Curva extremadamente inversa.
Curva muy inversa. 56 58 61 62 63 64 64 65 65 66 67 67 68 69 69 70 72 73 APÉNDICE A Figura A.1 Figura A.2 Figura A.3 Figura A.4
Área de trabajo en PSCAD.
Ventana para creación de un nuevo componente.
Ventana para agregar entradas y salidas al componente.
Relevador de sobrecorriente.
78
79
79
Relación de figuras iv Figura A.5 Figura A.6 Figura A.7 Figura A.8 Figura A.9 Figura A.10 Figura A.11 Figura A.12 Figura A.13 Figura A.14 Figura A.15 Figura A.16 Figura A.17 Figura A.18 Figura A.19 Figura A.20
Figura A.21
Barra de menú, opción componentes.
Componentes para obtener una grafico
TC`s del relevador 1. Creación del grafico. Panel de gráficos.
Componentes para observar fasores.
Conexión y fasores.
Tensiones en el BUS 1. Corrientes en el BUS 1.
Tensiones en el BUS 2.
Corrientes en el BUS 2.
Tensiones en el BUS 3. Corrientes en el BUS 3.
Falla en el bus 1, vista por el relevador 3.
Falla en el bus 3, vista por los relevadores 1 y 2.
Falla en el bus 2 vista por el relevador 4.
vi
RELACIÓN DE TABLAS
Capítulo 1 y 2
TABLA TITULO PAG
1.1
2.1
Relaciones de corrientes del transformadores (MR es la relación del TC´s).
Constantes para definir las curvas características de tiempo-corriente [7]. 5 27 Capítulo 3 3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9
Parámetros de generadores y líneas de transmisión.
Tipos de fallas.
Ajustes de transformador de corriente.
Ajustes del transformador de tensión.
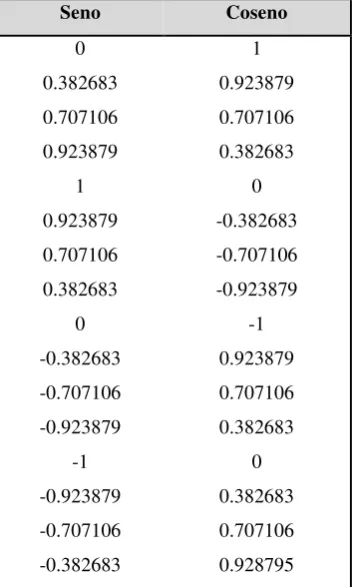
Señales de referencia muestreadas. Valores discretos.
Valores seno y coseno.
Valor real, imaginario y magnitud del fasor.
Niveles de cortocircuito trifásico. 44 46 47 47 49 50 51 52 53 Capítulo 4 4.1 4.2 4.3 4.4 4.5 4.6
Tensiones y corrientes nominales en la red eléctrica.
Fallas trifásica detectadas por los relevadores.
Ajustes de los relevadores.
Datos de la simulación.
Tiempos de operación.
Relación entre corriente de entrada y de ajuste (M).
Nomenclatura
vii
NOMENCLATURA
A
A, B, y p
BRK CA CD DFT EMTDC FACTS Fs Hz I1a_sec Icc Iop IEEE K M M.TAP N PSCAD RMS RTC RTP
Unidad de corriente eléctrica [Amperes].
Constantes proporcionadas por la IEEE para caracterizar la curva de tiempo inverso.
Interruptor.
Corriente alterna.
Corriente directa.
Transformada discreta de Fourier.
Transitorios electromagnéticos con corriente directa.
Sistemas flexibles de transmisión de corriente alterna.
Frecuencia de muestreo.
Unidad de frecuencia [Hertz].
Corriente del ampermetro 1 y de la fase a, tomada del lado secundario del TC´s.
Corriente de cortocircuito.
Nivel de corriente a la que opera el relevador.
Instituto de ingenieros electricistas y electrónicos.
Constante utilizada para el método de eliminación de corriente directa (filtro mimic).
Relación entre la corriente del sistema y la corriente de ajuste.
Múltiplo de TAP.
Numero de muestras tomadas de una señal analógica.
Diseño asistido por computadora de sistemas eléctricos de potencia.
Valor eficaz o medio cuadrático.
Relación de trasformación de corriente.
viii
SEP
TC´s
TP´s
TPCC´s
V
Ω
1
Sistema eléctrico de potencia.
Transformadores de corriente.
Transformadores de potencial.
Transformadores de potencial con conjunto de capacitores.
Unidad de tensión [Volt].
Unidad de resistencia eléctrica [Ohm].
Resumen
ix
RESUMEN
En este trabajo se desarrolla el modelo de un relevador de sobrecorriente direccional con caracteristicas de disparo instantaneo, y de retardo de tiempo, utilizando bloques de logica del software de simulación de transitorios electromagneticos EMTDC-PSCAD.
La operación del relevador se basa en la logica empleada en relevadores numericos. Se tiene un modulo incial en el cual se procesa las señales de entrada como son tension o corriente y se transforman a señales discretas, las cuales son utilizadas en el siguiente bloque que contiene los algoritmos para la obtencion de fasores. En este trabajo el algoritmo para la extraccion de fasores es la trasformada discreta de Fourier (DFT). El ultimo bloque incluye la logica de operación del relevador de sobrecorriente direccional en la cual el relevador mediante una logica detecta condiciones anormales en la red electrica de prueba según sus ajustes.
Con un modelo base del relevador de sobrecorriente direccional creado en PSCAD, se crean copias de este modelo dentro de una red electrica de prueba simulada en el mismo software para llevar a cabo las pruebas al aplicar fallas trifásicas en distintos puntos de la red para observar la operación coordinada de los relevadores. Se observaron los tiempos a los que operó cada uno de los relevadores según la posicion de la falla en la red y se compararon con tiempos establecidos en la norma IEEE C37.112-1996.
x
INTRODUCCIÓN
El sistema eléctrico de potencia está compuesto por generadores, transformadores, líneas de transmisión y distribución entre otros elementos. El propósito de estos elementos en conjunto es generar y suministrar energía eléctrica a consumidores de forma ininterrumpida, segura y confiable. Sin embargo todos los elementos están expuestos a fallas de cortocircuito.
Una falla de cortocircuito en cualquier elemento del sistema eléctrico de potencia, debe ser aislada lo más rápido posible para evitar interrupciones de energía al usuario y de esta manera minimizar sus efectos sobre el resto del sistema eléctrico. Por esta razón se cuenta con los dispositivos de protección que permiten detectar las fallas y que actúan de forma rápida cuando dichas anomalías se presentan.
Los relevadores de protección son los encargados de detectar estas fallas e iniciar una acción para desconectar y poner fuera de servicio al elemento en condiciones de falla del resto del sistema eléctrico. Para observar cómo operan los relevadores de protección en condiciones de falla se utilizan herramientas como software de simulación ya que resulta complicado contar con relevadores físicos solo para entender su funcionamiento ante condiciones de falla.
Los programas de simulación que actualmente se utilizan para observar el comportamiento de los relevadores de protección ante una falla cumplen con su función teniendo diferentes tipos de protecciones pero limitan al usuario únicamente a realizar algunos ajustes según las necesidades de protección sin poder acceder a la lógica principal de la protección para fines académicos y de investigación.
Introducción
xi de operación, de tal forma que el usuario puede interactuar con las características básicas de un relevador de sobrecorriente, los principios de operación del relevador y también realizar los ajustes necesarios para obtener la coordinación de estos relevadores en una red eléctrica. De esta forma, el usuario entenderá mejor la lógica de funcionamiento del relevador de sobrecorriente al realizar simulaciones transitorias en la red eléctrica dentro del mismo ambiente de simulación.
Este trabajo se conforma de cuatro capítulos.
En el capítulo 1 se presentan los sistemas de protección utilizados en sistemas eléctricos de potencia, los elementos que componen un sistema de protección, y los métodos más comunes para detectar condiciones anormales en el sistema.
En el capítulo 2 se abordan los relevadores de protección numéricos, los métodos que utilizan para procesar las señales analógicas y transformarlas a señales discretas. Se muestra los principios operación de los relevadores de sobrecorriente instantáneos, de tiempo de retardo y direccionales, así como las ecuaciones que se utilizaron para la simulación del relevador.
En el capítulo 3 se describe el software utilizado para el desarrollo del relevador, se explica la construcción del relevador de sobrecorriente con los bloques de PSCAD, se describe la red eléctrica que se utilizó para la simulación del relevador y se realizan pruebas al relevador para comprobar su operación ante fallas.
Página | 1
CAPÍTULO 1
PROTECCIÓN DE SISTEMAS ELECTRICOS
Los Sistemas Eléctricos de Potencia (SEP), experimentan fallas producidas por cortocircuito, operación anormal de equipos, apertura o cierre de interruptores, perturbaciones atmosféricas, entre otras. La presencia de una falla puede causar daño físico a los equipos además de caídas en la tensión eléctrica. De lo anterior, la función principal de un relevador de protección es aislar al elemento fallado al sacarlo de servicio lo más rápido posible para minimizar daño al equipo y mantener en la medida de lo posible la operación normal del resto del sistema. De esta forma el relevador monitorea continuamente al elemento del sistema de potencia que está protegiendo y en caso de detectar una falla y determinar mediante su lógica de protección que la falla toma lugar en dicho elemento, el relevador manda una señal de apertura al interruptor correspondiente para aislar al elemento fallado [1].
Los interruptores están generalmente localizados en cada elemento principal del sistema de potencia, es decir en cada transformador, generador, línea de transmisión, entre otros; de tal forma que en caso de falla estos elementos puedan ser desconectados completamente del resto del sistema. Los interruptores deben tener la capacidad suficiente para soportar momentáneamente la corriente de cortocircuito máxima que puede fluir por ellos. La filosofía principal en el diseño de un esquema de protección es liberar una falla rápida y selectivamente, con la finalidad de evitar inestabilidades en el sistema de potencia y apagones generales en el servicio [1].
Capítulo 1 Protección de sistemas eléctricos.
Página | 2
1.1 Elementos de un sistema de protección.
La función de los sistemas de protección es remover del sistema eléctrico de potencia cualquier elemento que empiece a operar de de manera anormal tan rápido como sea posible para mantener la estabilidad del sistema. Es importante mencionar que los sistemas de protección no previenen fallas o daños a equipos, ellos solo operan después de que una condición anormal ha ocurrido, con suficiente magnitud para permitir su operación.Para la aplicación de los sistemas de protección se deben tomar en cuenta cinco aspectos importantes, estos son: confiabilidad, selectividad, velocidad, simplicidad, y economía [1].
Aunque algunas veces se entiende por sistema de protección un conjunto de relevadores, en realidad un sistema de protección consta de otros subsistemas que contribuyen a la detección y remoción de fallas. Los subsistemas principales de un sistema de protección son los transformadores de instrumento, relevadores, alimentación de CC e interruptores, los cuales tienen una determinada función en el sistema de protección. En la figura 1.1 se muestran los elementos de un sistema de protección [1].
Alimentación C.C.
Relevador
Interruptor. Transformador.
Página | 3
1.1.1 Relevadores.
Este es un dispositivo el cual puede ser activado o puede iniciar su operación al recibir una señal de entrada, ya sea de tensión, corriente o ambas. Cuando opera, aísla las condiciones anormales que se presentan en el sistema eléctrico. Este elemento consta básicamente de dos partes principales: la bobina que recibe la señal y los contactos, los cuales se activan al energizarse la bobina [4].
1.1.2 Interruptores.
El interruptor es un dispositivo de desconexión el cual, de acuerdo con las normas, está definido como un dispositivo capaz de conectar, conducir e interrumpir corrientes bajo condiciones normales y también conectar y conducir corrientes por tiempo determinado e interrumpirlas bajo condiciones anormales, tales como corrientes de corto circuito.
El conocimiento del interruptor y su operación es indispensable para entender la protección con relevadores. Ya que es la coordinación entre ambos la que da como resultado un exitoso aislamiento de falla ya que el interruptor aísla la falla, interrumpiendo la corriente [1].
1.1.3 Banco de baterías (Alimentación de C.C).
Las baterías son el equipo que, en un sistema de protección, tienen la función de proporcionar alimentación al circuito de disparo, enviando a través de los contactos de los relevadores la señal de disparo a la bobina de los interruptores.
Capítulo 1 Protección de sistemas eléctricos.
Página | 4 permanentemente mediante un sistema de recarga a la línea de corriente alterna de la subestación, y en condiciones normales, se apoyan en este cargador.
El cargador debe tener una capacidad suficiente para mantener todas las cargas que se alimentan por el banco de baterías. A su vez, los bancos se dimensionan para mantenerse en operación normal durante 8 a 12 horas después de un apagón total. Aunque los bancos de baterías son confiables, en ocasiones y en subestaciones importantes estos equipos se duplican para garantizar la operación correcta del sistema de protección.
1.1.4 Transformadores de instrumento.
Se denominan transformadores de instrumento o de medición, a los que se emplean para alimentar los dispositivos de protección, específicamente los relevadores, el uso de estos transformadores se hace necesario en las redes de alta tensión en donde se requiere reducir los valores de tensión y corriente de modo que puedan ser admisibles en los dispositivos de protección, por razones de seguridad y comodidad [1].
Los objetivos fundamentales que tienen los transformadores de instrumento son:
Aislar los dispositivos de protección del devanado primario o secundario, permitiendo así medir las tensiones altas y corrientes utilizando instrumentos de bajo alcance.
Proporcionar mayor seguridad al personal, ya que lo protege contra los valores altos de tensión.
Permitir la normalización de las características de operación de los instrumentos.
Existen dos tipos de transformadores de instrumento, los transformadores de
Página | 5
1.1.4.1Transformadores de corriente (TC’s).
Para que el transformador indique exactamente el valor de corriente que circula en el circuito primario, la relación de corriente (RTC) entre el primario y el secundario, se debe de mantener casi constante al variar la carga, con el fin de reducir al mínimo la corriente de magnetización, la relación analítica se muestra en la ecuación (1.1) [2].
P
s
I
RTC
I
(1.1)Donde:
Ip Corriente en el devanado primario, [A]. Is Corriente en el devanado secundario, [A].
Con el fin de facilitar los cálculos para determinar la corriente que circula en el circuito primario (para estimar en el ajuste de operación del relevador), se ha normalizado la corriente nominal secundaria en un valor de 5 A.
Los valores de corriente nominal deben ser un dato proporcionado en la placa del transformador, o en caso de usar un software se debe mostrar en los parámetros preestablecidos, y se expresa de la siguiente forma: 500/5 A, 200/5 A, 100/5 A, etc. El primer valor corresponde a la corriente en el primario, y la segunda al valor en el secundario.
Tabla 1.1 Relaciones de corrientes del transformadores (MR es la relación del TC´s) [2].
600:5 MR 1200:5 MR 2000:5 MR 3000:5 MR
Capítulo 1 Protección de sistemas eléctricos.
Página | 6
1.1.4.2 Transformadores de potencial (TP’s).
El transformador de potencial es un transformador de tensión donde el circuito primario se conecta en derivación (paralelo) con el circuito, para el cual se desea conocer la tensión. En el circuito secundario se conectan los relevadores o instrumentos de medición (vóltmetro). Debido a que estos transformadores deben detectar exactamente el valor de la tensión presente en el devanado primario, es necesario que la relación entre las tensiones primaria y secundaria se mantenga constante, esto es, que debe limitarse tanto como sea posible la caída de tensión en los dos devanados. La relación de transformación (PT relación) es [1]:
P
s
V
RTP
V
(1.2)Donde:
Vp Tensión primaria, [V]. Vs Tensión secundaria, [V].
Los TP‘s tienen devanados primarios que pueden ser conectados directamente al
sistema de potencia (TP‘s) o bien a través de la sección de un banco de capacitores conectado entre fase y tierra (TPCC‘s, Transformador de Potencial
con Conjunto de Capacitores).
Los TP‘s se usan con todos los valores de tensión existentes en el sistema de potencia y comúnmente se conectan al bus. En un valor aproximadamente de 115
kV, los TPCC‘s son más convenientes de utilizar ya que generalmente son más
económicos que los TP‘s para altos niveles de tensión.
Usualmente, los TPCC‘s se conectan a la línea, en lugar del bus, ya que el conjunto de capacitores puede ser usado como un conjunto de radio frecuencias
en la línea para el uso de protección piloto. Ambos tipos (TP‘s y TPCC‘s) tienen
Página | 7
1.2 Principios de operación de los relevadores.
Dado que el objetivo de un sistema de protección es detectar fallas o condiciones anormales de operación, los relevadores deben evaluar una gran variedad de parámetros para establecer la acción correctiva requerida. Generalmente, se utiliza la información de las corrientes y tensiones en las terminales del equipo protegido [2].
1.2.1 Detección de fallas.
Durante una falla, generalmente se observan aumentos en las magnitudes de intensidad de corriente y reducción en las tensiones. Además se pueden observar cambios en diferentes parámetros tales como ángulos de fase de los fasores de corrientes y tensiones, componentes armónicas de las mismas señales, potencias activas y reactivas, frecuencia del sistema, entre otras. El principio de operación de los relevadores se basa en la detección de estos cambios, e identificando los cambios con la posibilidad de que pueda existir una falla dentro de la zona de protección asignada a los relevadores. A continuación se presentan las principales técnicas utilizadas en esquemas de protección de sistemas eléctricos [2].
1.2.1.1 Detección de nivel de ajuste.
Normalmente ante una falla, se observan corrientes mayores que las normales. Cualquier corriente de magnitud superior a un cierto valor (valor de pick up) puede considerarse como condición de falla o una condición anormal dentro de la zona de protección de un relevador; a este se le llama nivel de ajuste de arranque del dispositivo [2].
Capítulo 1 Protección de sistemas eléctricos.
Página | 8 La característica de operación de un relevador de sobrecorriente se puede representar con una gráfica de tiempo de operación del relevador contra la corriente que mide dicho relevador. Para esto se normaliza la corriente como una relación de corriente real sobre la corriente de arranque. El tiempo de operación para corrientes normalizadas menores que 1.0 es infinito, mientras que para valores mayores que 1.0, el relevador debe operar. Una característica de operación de un relevador de sobrecorriente de tiempo definido ideal es similar a la mostrada en la figura 1.2 mediante una línea continua, y con línea punteada se muestra la característica de tiempo inverso [2].
1.0 Tiempo, [s].
Tiempo inverso. Tiempo definido.
Figura 1.2 Característica de un relevador de sobrecorriente de tiempo definido y tiempo
inverso [2].
1.2.1.2 Comparación de magnitud.
Este principio de operación se basa en la comparación de una o más cantidades operativas entre sí. Por ejemplo, un relevador de balance de corrientes puede comparar la corriente en un circuito con la corriente en otro, los cuales deberían ser iguales o proporcionales en magnitud para condiciones normales de operación [2].
Página | 9 conectadas en sus extremos a los mismos nodos. Se puede utilizar un relevador de comparación de corrientes que compare las magnitudes de las dos corrientes de línea
I
A eI
B. SiI
A es mayor queI
B
, y la línea B no está abierta,entonces, el relevador reportará una falla en la línea A y la abriría, (ε es una
tolerancia determinada). Una lógica similar se puede utilizar para disparar la línea B si la corriente excede la de la línea A, cuando esta última no está abierta. Otro ejemplo, donde se puede aplicar este tipo de relevador es cuando los devanados de una máquina tienen dos subdevanados idénticos en paralelo por fase [2].
IA
IB
Relevador.
Figura 1.3 Comparación de magnitud en dos líneas de transmisión paralelas [2].
1.2.1.3 Comparación diferencial.
La comparación diferencial es uno de los métodos más susceptibles y efectivos para proporcionar protección contra fallas. El concepto de comparación diferencial es sencillo y se puede entender analizando el devanado de un generador como se muestra en la figura 1.4. El devanado es eléctricamente continúo y la corriente que entre en la terminal
I
1, debe igualar a la corrienteque sale por el otro extremo
I
2.Capítulo 1 Protección de sistemas eléctricos.
Página | 10 Cuando se presenta una falla en algún punto en el devanado, las corrientes
I
1 e2
I
serán diferentes. En forma alterna, se puede obtener la suma algebraica deestas dos corrientes entrando al devanado protegido (
I
1-I
2), y usar un relevador detector de nivel para identificar la presencia de una falla. En ambos casos, la protección es llamada protección diferencial. En general, el principio de operación de la protección diferencial es capaz de detectar magnitudes muy pequeñas de corrientes de falla. Este esquema de protección requiere corrientes de ambos extremos de la zona protegida, lo que restringe su aplicación a aparatos tales como transformadores, generadores, motores, barras, capacitores, reactores, etc. [2].Figura 1.4 Principio de comparación diferencial aplicado al devanado de un generador [2].
1.2.1.4 Comparación de ángulo de fase.
Página | 11 Cuando la corriente fluye en dirección opuesta al relevador, este ángulo φ estará entre 0 a -180 grados eléctricos. De manera similar, para una falla en la dirección hacia el relevador, el ángulo de fase de la corriente con respecto a la tensión estará entre 0 y 180 grados eléctricos. Donde φ es el ángulo de impedancia del circuito fallado y será de cerca de 90 grados eléctricos para líneas de transmisión en sistemas de potencia. En la figura 1.5 se muestra dos líneas de transmisión, que se utilizan para explicar la diferencia en las relaciones de fase creadas por una falla, y por la demanda de la carga conectada. Esta evaluación se realiza mediante relevadores que respondan a una diferencia entre dos cantidades de entrada, en este ejemplo, se usa la tensión y corriente de falla [2].
Icarga.
Icarga.
IF.
IF.
R
R
Φ IF
V
Icarga
Φ
IF
V
Icarga
Figura 1.5 Comparación del ángulo de fase en una línea de transmisión [2].
1.2.1.5 Medición de distancia.
El tipo de protección más segura y confiable es cuando se compara la corriente entrante al circuito con la corriente que sale de este. Sin embargo en líneas de transmisión, la longitud, tensiones y configuración de la línea pueden hacer de este método un principio antieconómico. En lugar de comparar la corriente local de la línea con la corriente final de la línea, el relevador compara la corriente local con la tensión local.
Capítulo 1 Protección de sistemas eléctricos.
Página | 12
1.2.1.6 Contenido armónico.
Las intensidades de corriente y tensiones en un sistema eléctrico de potencia usualmente tienen una onda sinusoidal de frecuencia fundamental. Sin embargo, existen derivaciones de la onda sinusoidal fundamental, tales como la tercera armónica de tensión y corriente producidos por generadores que están presentes durante la operación normal del sistema. Otros armónicos ocurren durante condiciones anormales en el sistema, tales como armónicas impares asociadas a la saturación de los transformadores o componentes transitorias causadas cuando de energizan los transformadores. Estas condiciones anormales pueden ser detectadas censando el contenido armónico a través de filtros en relevadores electromecánicos y de estado sólido o por cálculos en relevadores digitales. Cuando se determina que existe una condición anormal se puede tomar una decisión para desconectar el elemento fallado o tomar una acción de control [4].
1.2.2 Funcionamiento de los relevadores de protección.
Es difícil evaluar completamente el funcionamiento individual de cada uno de los relevadores de protección en un sistema, debido a que varios de estos elementos cercanos en un área con problemas podrían comenzar a operar por la presencia de una falla. Un buen funcionamiento ocurre solamente cuando los relevadores primarios operan para aislar la zona con problemas. Todos los demás relevadores alertados regresaran a su modo normal de reposo. El funcionamiento (operación del relevador) puede clasificarse de la siguiente manera [3]:
1.2.2.1 Operación correcta.
Una operación correcta indica que:
1. Al menos uno de los relevadores primarios operó correctamente,
2. Ninguno de los relevadores de respaldo operó para el disparo debido a la falla y,
Página | 13
1.2.2.2 Operación incorrecta.
Las operaciones incorrectas, resultan de una falla, un mal funcionamiento, una mala planeación del sistema de protección, por el aislamiento incorrecto de un área, o por un error para aislar una zona en problemas [3].
Las razones de una operación incorrecta puede ser una o la combinación de:
1. Una mala aplicación de los relevadores.
2. La colocación incorrecta de relevadores,
3. Errores del personal, y
4. Problemas o fallas del equipo (relevadores, interruptores, TC‘s, TP‘s,
banco de baterías, cableado, comunicación, auxiliares, entre otros).
Es imposible anticipar y proporcionar la protección para los numerosos problemas que se presentan en el sistema eléctrico de potencia. Aún con la mejor planeación y diseño siempre habrá alguna zona que podría no ser protegida, o un error no detectado [3].
1.2.2.3 Operación indefinida.
Capítulo 2 Modelo del Relevadores de protección.
Página | 14
CAPÍTULO 2
MODELO DEL RELEVADOR DE PROTECCIÓN
2.1 Relevadores numéricos.
En la actualidad, los relevadores de protección llevan a cabo un gran número de funciones junto a la protección principal. Las ventajas de los relevadores modernos basados en microprocesadores sobre su contraparte de relevadores tradicionales se encuentran en las ventajas incluyen entre otras la localización de fallas, la generación de reportes de eventos y la lógica programable que permite que muchas funciones sean incluidas en un solo dispositivo con lo que se ahorra espacio y costos de instalación. Estos dispositivos utilizan diferentes métodos computacionales para la estimación de fasores, como técnicas de ajustes de curvas, técnica basada en análisis de Fourier entiempo discreto denominada DFT (Transformada Discreta de Fourier) la cual es aun ampliamente usada [9].
El propósito general de un relevador de tipo digital es exactamente el mismo que el de un relevador convencional, en el sentido de que éste debe aceptar datos de entrada como tensión y corriente, procesar los datos y ejecutar una acción de control (en el caso más simple, mandar una señal de disparo al interruptor asociado) cuando sea requerido. Los principales bloques funcionales de un relevador digital se muestran en la figura 2.1 [9].
Transformadores de instrumento
Procesamiento de señales analógicas.
Conversión Analógica/
digital.
Procesamiento digital
de señales. Bloques de Salida. Disparo.
(Algoritmo digital)
Señales de entrada Analógicas.
Página | 15
2.1.1 Subsistema de entrada analógica.
Este subsistema consiste de bloques de aislamiento, escalado, filtrado y de adquisición de datos. Su principal uso es el de aislar al relevador del sistema de potencia, disminuir las señales de tensión y corriente, remover los componentes de alta frecuencia, el ruido, y muestrear estas señales analógicas para convertirlas a señales digitales, estos bloques se describen a continuación [8].
2.1.1.1 Aislamiento y escalado.
Las salidas de los transformadores de potencial y de corriente están dentro del alcance normalizado de entrada para los relevadores comerciales electromecánicos y estáticos. Sin embargo, el nivel de estas tensiones y corrientes no son apropiados para usarse en los circuitos de computadoras. Por lo tanto, se hace necesario usar una atenuación extra de estas señales antes de ser usados en los relevadores digitales. Esta atenuación o reducción extra de nivel debe realizarse sin alterar la forma de onda de tensiones y corrientes y proveer además aislamiento eléctrico [8].
2.1.1.2 Filtrado antialiasing.
Capítulo 2 Modelo del Relevadores de protección.
Página | 16 señales de entrada. El efecto aliasing se produce cuando dos formas de onda continuas al muestrearse aparecen como una misma representación digital [8].
2.1.1.3 Muestra y retención.
El proceso por el cual las formas de onda continuas pueden ser representadas como valores discretos se conoce como muestreo y es llevado a cabo por un convertidor analógico a digital y un circuito de muestra y retención. La función básica de un circuito de muestra y retención en un sistema de entrada analógica es capturar una señal y mantenerla a ese valor constante durante el subsecuente ciclo de conversión analógica a digital.
El teorema del muestreo (teorema de Nyquist) establece que la frecuencia de muestreo debe ser más grande que el doble de la más alta frecuencia que se encuentre en la señal a ser muestreada. De la misma forma el alcance de frecuencias de interés en la señal a muestrear no debe ser mayor a ±fs/2, de donde este valor es conocido como valor Nyquist crítico o frecuencia de corte. Si esta regla no se sigue, entonces la representación digital única de la forma de onda de la señal original continua se pierde y un efecto de aliasing ocurre [10].
2.1.1.4 Convertidor analógico a digital
Para obtener información sobre el estado de un sistema de potencia, un relevador de tipo numérico toma muestras regularmente de las señales secundarias de tensiones y/o corrientes que entran a él. Este proceso se conoce como conversión analógica a digital y es llevada a cabo por hardware especial.
Página | 17
2.1.2 Procesamiento digital de señales.
Las señales de entrada a un relevador digital de protección deben ser apropiadamente convertidas a forma digital de forma tal que el microprocesador pueda manejarlas fácilmente. La medición fasorial es muy importante para monitorear y diagnosticar sistemas eléctricos de potencia ya que los fasores portan la amplitud y el ángulo fase de una señal senoidal en estado estable.
Los dispositivos de protección desarrollados antes de 1972 usaban técnicas de ajuste de curvas para obtener fasores de los valores instantáneos de tensiones y corrientes. Se utilizaban técnicas basadas en análisis de Fourier en tiempo discreto denominada DFT (Transformada Discreta de Fourier) la cual es aun ampliamente utilizada. Muchas otras técnicas para la estimación correcta de los fasores fueron utilizadas, empleando principios tales como algoritmos trigonométricos, ajustes por errores mínimos cuadrados, funciones de Walsh, filtros de Kalman, que sin embargo nunca se volvieron comerciales. Solo la técnica computacional DFT se mantiene como la base para el cálculo de fasores en la mayoría de los relevadores comercial actuales [8].
2.1.2.1 Transformada Discreta de Fourier
La Transformada Discreta de Fourier era conocida en teoría desde hace muchos años, pero solamente con la llegada de la computadora digital fue llevada a la práctica. Ni la Serie de Fourier, ni la Transformada de Fourier se prestan fácilmente para cálculos en computadoras digitales. Para vencer este impedimento se desarrolló la Transformada Discreta de Fourier (DFT) [10].
Capítulo 2 Modelo del Relevadores de protección.
Página | 18 Se dice que la señal de entrada se encuentra en el dominio del tiempo, es decir, muestras tomadas en un periodo de tiempo establecido, o señal discreta de la onda que será transformada. El término dominio de la frecuencia es utilizado para describir las amplitudes y fases de las frecuencias que componen la señal de entrada. El dominio de la frecuencia contiene exactamente la misma información que el dominio del tiempo, solo que en diferente forma. Si se conoce uno de los dominios se puede conocer el otro [10].
Si se cuenta con la señal en el dominio del tiempo, el proceso para conocer el dominio de la frecuencia es llamado descomposición o análisis de la Transformada Discreta de Fourier. Si se conoce el dominio de la frecuencia, el cálculo para obtener el dominio del tiempo se conoce como síntesis o Inversa de la Transformada Discreta de Fourier. El número de muestras en el dominio del tiempo se representa por la variable N, el cual puede tomar cualquier valor entero positivo, pero se eligen 128, 256, 512, etc., esto es debido a que los datos guardados digitalmente en una computadora usan direccionamiento binario y además, el algoritmo más eficiente para calcular la DFT conocido como transformada rápida de Fourier, opera con N muestras que son potencia de dos [10]. El dominio de la frecuencia consta de dos partes, la parte real de X[Real], que es el arreglo en donde se encuentran las amplitudes de las formas coseno; y la parte imaginaria de X[Imag], que son los valores de las formas seno [10].
Para la implementación del algoritmo se necesitan funciones ortogonales y las funciones que se utilizan son seno y coseno, para las cuales se muestra que son ortogonales con las siguientes ecuaciones:
2 / 2 /
2 / 0
0 0 0
1 1 1
( ) ( ) ( ) ( ) (2 ) . 2
2 2 2
T w w
w t
t t t
f t g t dt Sen wt Cos wt dt Sen wt dt Cos wt w
1 1. 2 2 (0) 1 1.
1 1 02 2w Cos w w Cos 2 2w
Página | 19 Una vez comprobado que estas funciones son ortogonales, se seleccionan la función seno y coseno a la mínima frecuencia de interés (frecuencia nominal, en este caso es de 60Hz) y después se muestrean las señales de referencia a la frecuencia de muestreo seleccionada y ahora se realizan los siguientes pasos:
Multiplicar la primera muestra de la ventana con el primer valor discreto de cada señal de referencia.
Se guardan los datos en tablas.
Se repiten las multiplicaciones y se guardan los resultados para todas las muestras subsecuentes hasta considerar todos los datos de la ventana.
Se suman los productos de las multiplicaciones con los productos previos.
Dividir los resultados de las sumas del paso anterior entre un medio del número de muestras de la ventana.
Para la estimación del fasor se calcula la magnitud y el ángulo con las siguientes ecuaciones.
2 2
Re Im
Magnitud al aginario (2.2)
tan (1 Im )
Re aginario Angulo
al
(2.3)
Lo primero que se debe definir es la frecuencia nominal y las muestras requeridas por ciclo. Para obtener la frecuencia de muestreo se utiliza la siguiente ecuación [10].
f
m
f
nominal*
N
m (2.4)Donde:
f
m Frecuencia de muestro.
f
nominal Frecuencia nominal del sistema.Capítulo 2 Modelo del Relevadores de protección.
Página | 20 Existen dos maneras para tomar las muestras:
Iniciar en el instante t=0 (muestras: 0°, 30°, 60°,…)
Integración de la regla trapezoidal.
Iniciar después de un retardo (muestras: 15°, 45°, 75°,…) Regla rectangular.
[image:37.595.159.436.263.480.2]En la figura 2.2 y 2.3 se observan las señales seno y coseno muestreadas a una frecuencia de muestreo de 720Hz, esto es a 12 muestras por ciclo.
Figura 2.2 Señal seno muestreada a una frecuencia de 720Hz.
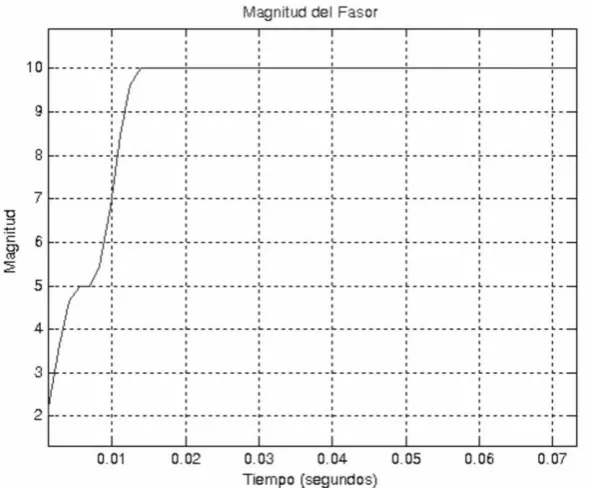
[image:37.595.168.426.532.736.2]Página | 21 El Fasor estimado en magnitud para el algoritmo de la DFT se muestra en la figura 2.4.
Figura 2.4 Magnitud del fasor tomando 12 muestras [10].
La estimación del fasor se hace por cinco ciclos de la frecuencia fundamental por lo tanto tiene una duración de 83.33 ms (mili segundos). Sabiendo que el algoritmo toma todo un ciclo, lo que es igual a 12 muestras para estimar el fasor es posible notar en la figura 2.4 que el fasor tarda en estabilizarse 12 muestras, lo que es lo mismo a 0.0166 s.
Ventajas del algoritmo DFT.
Atenúa efectivamente el ruido, todas las armónicas y todas las componentes de alta frecuencia.
Desventaja del algoritmo.
Capítulo 2 Modelo del Relevadores de protección.
Página | 22
2.1.2.2 Filtro mimic.
Este es un filtro digital que se utiliza en sistemas de protección para eliminar la componente exponencialmente decayente de CD que se presenta cuando ocurren fallas en el sistema eléctrico de potencia [11].
En relevadores que protegen líneas de transmisión se llega a presentar un sobre alcance en el ajuste cuando se presenta una componente de decaimiento de DC en corrientes de falla. En algunas aplicaciones como protección de líneas o ubicación de fallas el componente de CD debe ser eliminado y esto se puede realizar con un filtro mimic [11].
Un filtro mimic consiste de una resistencia en serie con una inductancia de forma:
k(1 s )
1 (2.5)La suma de una ganancia y un circuito diferenciador se representa por la ecuación 2.5. El circuito diferenciador es representado con una transformada de Laplace, la cual puede ser simulada con el siguiente filtro FIR:
s 1 Z 1
(2.6)
Sustituyendo la ecuación (2.6) en (2.5) se obtiene:
K 1 1
1*Z1
(2.7)
En esta ecuación la ganancia K tiene que ser ajustada de tal manera que a una frecuencia nominal la ganancia del filtro sea 1. A 60Hz la ganancia se puede expresar como:
Ganancia(60Hz) K[(1 1) 1e jwT] 1
Página | 23
2
2 2
1 1 1
s s
1 K
2 *60 2 *60
(1 ) Cos Sin
F F
(2.9)Antes de pasar por el filtro de Fourier, la señal de corriente es procesada con el filtro mimic representado por la ecuación 2.7 [11].
En la figura 2.5 se muestra el efecto de la componente de decaimiento en la magnitud de salida en un filtro de DFT y en la figura b se aplica el filtro mimic el cual reduce sustancialmente sino es que elimina completamente el efecto de la componente de CD aplicándolo a un filtro de DFT [11].
0 Muestras . 0.2 0.4 0.6 0.8 1 1.2 Magnitud de la señal.
10 20 30 40 50 60
Muestras . 0.2 0.4 0.6 0.8 1 1.2
10 20 30 40 50 60
Respuesta del filtro sin la componente de CD. Respuesta del filtro con componente de CD.
Respuesta del filtro sin la componente de CD. Respuesta del filtro con componente de CD.
a)Obtención de magnitud con un filtro DFT.
b)Obtención de magnitud con un filtro DFT mas el filtro mimic. Magnitud
de la señal.
Capítulo 2 Modelo del Relevadores de protección.
Página | 24
2.2 Relevadores de sobrecorriente.
Los niveles elevados de corriente en el sistema eléctrico de potencia que usualmente son causados por fallas, se utilizan para determinar la presencia de las mismas y operar dispositivos de protección. Los valores anormales de corriente pueden ser provocados por sobrecargas en el sistema y por cortocircuito. Por lo tanto se necesita conocer las corrientes de carga máxima para determinar si la relación entre la corriente de falla mínima y la corriente de carga máxima es suficientemente alta como para permitir que operen correctamente los relevadores simples accionados por sobrecorriente. Estos niveles excesivos de corriente pueden provocar daño térmico o mecánico a los elementos del sistema, afectan la calidad del servicio eléctrico por caídas de tensión y en casos extremos, pueden afectar la estabilidad del sistema eléctrico de potencia [2].
Los relevadores son los dispositivos que sirven para censar o detectar las condiciones de operación de la red y ordenar el cierre o apertura de los interruptores. La señal que reciben es mediante transformadores de corriente (TC´s) alojados en las boquillas de los interruptores, con relaciones de transformación de 600:5, 1200:5, etc. Los relevadores de sobrecorriente instantáneo o inverso ofrecen la protección más simple y con menor costo. De acuerdo a su tiempo inverso de operación los relevadores se clasifican como: moderadamente inverso, muy inverso, y extremadamente inverso [2].
2.2.1 Relevadores de sobrecorriente de tiempo inverso.
Página | 25
2.2.1.1 Ajustes de disparo y tiempo de retardo.
El primer paso para la aplicación del relevador de sobrecorriente de tiempo inverso es elegir el ajuste de disparo del relevador de modo que opere para todas las sobrecorrientes presentes en la sección de línea a la cual proporciona protección, este es el ajuste principal y se debe establecer para operar siempre ante fallas en esa zona de protección [2].
Esto requerirá márgenes por encima de las corrientes normales de operación y por debajo de las corrientes mínimas de falla del sistema. Si es posible, este ajuste también deberá proporcionar un respaldo para una sección de línea adyacente o equipo contiguo. Sin embargo la función de respaldo es una consideración secundaria. La función primaria del relevador es proteger su sección de línea, y no necesariamente debe estar comprometida a proporcionar la característica de respaldo.
El disparo de un relevador es el valor mínimo de la corriente, voltaje u otra cantidad de entrada de operación la cual se alcanza por incrementos progresivos de los parámetros de operación que causaran que el relevador llegue a su estado de operación. El ajuste se considera calculando la carga máxima y las corrientes de falla mínimas del sistema, en términos de la corriente primaria, y usando la proporción del TC se calcula la corriente secundaria [2].
Capítulo 2 Modelo del Relevadores de protección.
Página | 26
2.2.1.2 Características de la curva de operación.
Todos los relevadores de este tipo tienen varios taps, de los cuales cada uno representa la corriente mínima (o tensión) en la cual la unidad empezará a operar. Este es el valor de disparo (pick up) mínimo, de esta manera, un ajuste del relevador de corriente sobre el tap 2, indica el comienzo de operación en 2.0 A, más o menos los valores nominales del fabricante, en este valor de corriente, el tiempo será muy largo y difícil de verificar. Por tanto cualquier cambio en el valor de corriente, provocará un cambio considerable en el tiempo de operación. Debido a esto, los fabricantes generalmente no muestran sus curvas de tiempo por debajo de 1.5 a 2 veces el valor de pickup mínimo [2].
En la figura 2.6, la abscisa de las curvas características muestran los múltiplos de tap o corriente de disparo (pickup). El espaciamiento que se observa entre las curvas es ajustable y marcado por una escala conocida como palanca de tiempo (time dial). Esto ofrece diferentes tiempos de operación para el mismo nivel de corriente, una familia de curvas se muestra en la siguiente figura [2].
Tiempo, [s]
.15 .20 .30 .50 1.0 2.0 3.0 5.0 10
1.5 3.0 5.0 10 15 30 50
Múltiplos del tap del relevador.
1/2 1 2 3 4 5 6 7
Palanca de tiempo (time dial).
Figura 2.6 Curvas características de operación del relevador de sobrecorriente de tiempo
[image:43.595.168.429.437.725.2]Página | 27
2.2.1.3 Ecuación de tiempo-corriente.
Las ecuaciones 2.10 y 2.11 definen el tiempo de disparo y el tiempo de restablecimiento de una curva para un relevador de sobrecorriente de tiempo inverso. Mediante la aplicación de estas ecuaciones se puede definir con precisión una curva de tiempo inverso [7].
Para: 0 M 1 r 2 t t(I)
M 1
(2.10)
Para:
M 1
t(I) AP BM 1
(2.11)
Donde:
t( I ) En la ecuación 2.10 es el tiempo de restablecimiento. En la ecuación 2.11 es el tiempo de disparo.
M Es la relación entre Entrada disparo
I
I .
�� Es el tiempo de restablecimiento (M=0).
A,B, y p Constantes para proporcionar características de las curvas seleccionadas.
Las constantes y exponentes utilizadas en las ecuaciones 2.10 y 2.11 definen la curva característica tiempo-corriente, esta puede ser: moderadamente inversa, muy inversa o extremadamente inversa [7]. Estas constantes se muestran en la tabla 2.1.
Tabla 2.1. Constantes para definir las curvas características de tiempo-corriente [7].
CARACTERISTICA A B p ��
Moderadamente inversa. 0.0515 0.1140 0.0200 4.85
Muy inversa. 19.61 0.491 2.0000 21.6
Capítulo 2 Modelo del Relevadores de protección.
Página | 28
2.2.3 Relevadores de sobrecorriente direccional.
Cuando un sistema eléctrico de potencia no es radial o tiene fuentes de potencia activa inmersas a lo largo del alimentador, un relevador de sobrecorriente puede no ser capaz de proporcionar una protección adecuada [9].
Considerando una zona de protección para una línea con fuentes en sus dos terminales como se muestra en la figura 2.7, en este caso, dependiendo de la potencia de las fuentes para una falla en
F
1 (La cual está dentro de la zona deprotección) la corriente que fluye a través del relevador 2 en el bus B será menor que la corriente que fluye a través del mismo relevador (Pero en dirección contraria) para una falla en
F
2(la cual está fuera de la zona de protección). En talcaso, el relevador se ajusta para disparar ante una falla
F
1 pero también dispararacuando ocurra una falla en
F
2y el sistema operara de manera incorrecta [8].Esta situación se resuelve agregando un elemento direccional en el relevador del bus B, que restringe la operación del elemento de sobrecorriente cuando la falla este lejos de la zona de protección y operara cuando la falla se dirija de frente hacia el relevador en B [8].
1 2
F1 F2
A B
R1 R2
Página | 29 Los relevadores direccionales pueden usar el ángulo de fase entre la corriente de falla y alguna cantidad de referencia como la tensión para determinar la dirección de la falla.
Asumiendo que la falla del circuito se presenta en líneas de transmisión, la corriente se atrasa con respecto a la tensión 90°, suponiendo que la carga es puramente inductiva [8].
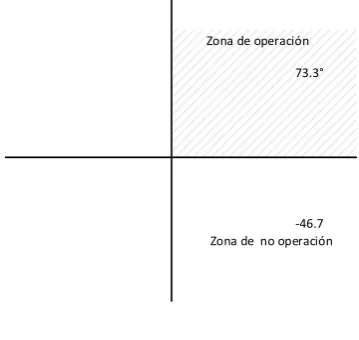
Si el ángulo entre el fasor de referencia y la corriente de falla es θ, entonces, su principio puede ser descrito por:
0 Zona de operación.
0 Zona de bloqueo.
Se debe notar que, aunque la región de operación y bloqueo ocupa el plano
entero, para una falla real, el ángulo θ estará alrededor de
2
, para una fallas
hacia adelante y
2
para fallas en reversa [8].
Capítulo 3 Desarrollo y simulación del modelo de relevador.
Página | 30
CAPÍTULO 3
DESARROLLO Y SIMULACIÓN DEL MODELO DE RELEVADOR
En el presente capitulo se describen algunas características del software EMTDC/PSCAD V45 versión educacional, la estructura, además de las funciones y los ajustes del relevador de sobrecorriente que se desarrolla. Se describe también la red eléctrica que se utiliza para la prueba del relevador y se presentan resultados obtenidos de las simulaciones.
3.1 Descripción del software EMTDC/PSCAD.
Los programas de simulación son herramientas que nos permiten entender el comportamiento de sistemas eléctricos de potencia complejos y ayudan a estudiar la respuesta de los sistemas cuando cambian sus parámetros o se someten a disturbios [14].
EMTDC es un programa de transitorios electromagnéticos que representa y resuelve ecuaciones diferenciales para sistemas electromagnéticos y electromecánicos en el dominio del tiempo y sus resultados son valores instantáneos en el tiempo los cuales se pueden convertir a magnitudes y ángulos fasoriales con la interfaz grafica PSCAD.
Página | 31 EMTDC/PSCAD es utilizado por ingenieros y científicos de empresas de manufactura, consultoras e instituciones académicas. Se utiliza para planeación, operación, diseño e investigaciones avanzadas [13].
Actualmente se pueden realizar los siguientes estudios en PSCAD, por mencionar algunos:
Estudios de contingencias en sistemas de AC que pueden constar de máquinas rotatorias, turbinas, trasformadores, líneas de trasmisión, cables y cargas.
Coordinación de protecciones.
Efectos de saturación en trasformadores.
Análisis de sobretensiones debido a fallas o apertura de interruptores.
Pruebas de impulso a transformadores.
Análisis de armónicos.
Diseño de sistemas de control y coordinación de FACTS y HVDC.
PSCAD cuenta con una librería completa de modelos de simulación de prueba, partiendo desde simples elementos pasivos y funciones de control, hasta modelos complejos como máquinas eléctricas, dispositivos FACTS, líneas de transmisión, trasformadores, fuentes de tensión, interruptores, diodos, tiristores, reguladores, etc.
Si se requiere un modelo que no existe en la librería de funciones, PSCAD proporciona los medios para construir modelos personalizados. Los modelos personalizados se pueden construir con los modelos existentes en la librería, formando un nuevo módulo.
Capítulo 3 Desarrollo y simulación del modelo de relevador.
Página | 32
3.2 Desarrollo del relevador de sobrecorriente en PSCAD.
Para el modelo de relevador de sobrecorriente se creó un nuevo modulo en PSCAD como se muestra en la figura 3.1. Este modulo cuenta con seis entradas en el lado izquierdo las cuales se alimentan por los lados secundarios de transformadores de tensión y corriente, y en el lado derecho cuenta con una salida la cual enviara un disparo al interruptor asociado. El procedimiento para crear componentes en PSCAD se explica en el apéndice A.1.
Relevador de Sobrecorriente. Ia
Ib
Ic
Va
Vb
Vc
Interruptor
Figura 3.1 Modulo del relevador de sobrecorriente creado en PSCAD.
El modulo tiene las siguientes características:
Contiene 3 entradas para tres fases de corriente.
Contiene tres entradas para tres fases de tensión.
La dimensión para cada entrada es 1.
Contiene 1 salida para el disparo a su interruptor asociado.
La dimensión para la salida es 1.
Página | 33
3.2.1 Conversión de las señales analógicas.
Dentro del módulo se obtienen las señales de entrada y se manda la señal de salida con los componentes que se muestran en la figura 3.2.
[Ia]
[Ib]
[Ic] [Vc]
[Vb] [Va]
[Interruptor]
Figura 3.2. Componentes de comunicación de entrada y salida.
Para la conversión de señales analógicas a valores fasoriales se utiliza el bloque de Transformada rápida de Fourier (FFT por sus siglas en ingles.), este bloque se localiza en la biblioteca de PSCAD y se muestra en la figura 3.3. La transformada rápida de Fourier determina la magnitud y ángulo de fase de la señal de entrada.
F=60 Hz
FFT Magnitud
Angulo
DC
Figura 3.3. Bloque de la Transformada rápida de Fourier.