“Excursiones en la Topolog´ıa Algebraica y algunas
aplicaciones”
T E S I S
PARA OBTENER EL T´ITULO DE:
LICENCIADO EN MATEM ´ATICAS APLICADAS
PRESENTA:
ISABEL FRANCO JIM´ENEZ
DIRECTOR DE TESIS:
JOS´E L. CARRASCO PACHECO
Agradecimientos
Agradezco a mi asesor de tesis Jos´e Lu´ıs Carrasco Pacheco por su comprensi´on, tiempo, paciencia y apoyo.
A mis sinodales: Adolfo Maceda M´endez, Jes´us Fernando Tenorio Arvide y Vulfra-no Tochihuitl BueVulfra-no, por las observaciones que hicieron de este un mejor trabajo y por el tiempo que invirtieron en la revisi´on de esta tesis.
Gracias a todos los maestros que tuve en el transcurso de la carrera, pues sin ellos esto no hubiera sido posible, en especial a la maestra Norma Edith Alamilla L´opez. Tambi´en le agradezco a mi amiga Erandy por estar conmigo en las buenas y en las malas.
Dedicatoria
A mis padres, Isabel y Augusto:
Por su infinita paciencia, amor y el apoyo incondicional que me han brindado, principalmente en aquellos momentos tan dif´ıciles de mi vida, los amo.
A mi hijo, Augusto:
Introducci´
on
En topolog´ıa, determinar si alg´un espacio topol´ogico se puede deformar mediante una aplicaci´on continua en otro, no es una tarea sencilla, es a partir de este proble-ma que surge lo que en la actualidad conocemos como Topolog´ıa Algebraica. Las teor´ıas de homotop´ıa y homolog´ıa singular de espacios topol´ogicos, son parte de la topolog´ıa algebraica, que entre otras cosas sirven algunas veces para solucionar el problema en cuesti´on, ya que trasladan un problema topol´ogico a uno algebraico. La metodolog´ıa que siguen estas teor´ıas para determinar si dos espacios topol´ogicos no son homeomorfos es la siguiente: dado un espacio topol´ogicoX se le asigna un grupo π(X), de modo tal, que si Y es otro espacio topol´ogico homeomorfo a X, entoncesπ(Y) es isomorfo aπ(X). Aπse le denomina invariante topol´ogico. Ahora bien, si π(Y) no es isomorfo a π(X), entonces X no puede ser homeomorfo a Y y el problema en este caso est´a resuelto. De aqu´ı que uno de nuestros objetivos es encontrar estos invariantes topol´ogicos. El primer paso que debemos de seguir para encontrar estos invariantes topol´ogicos es establecer una conexi´on,π, llamada funtor entre la clase de todos los espacios topol´ogicos y la clase de todos los grupos, de tal forma que si f : X → Y es una funci´on continua de espacios topol´ogicos, entoncesπ(f) :π(X)→π(Y) es un morfismo de grupos.
En la actualidad, la Topolog´ıa Algebraica no s´olo sirve para atacar el problema que se plante´o anteriormente, sino que se ha convertido en una herramienta poderosa en la matem´atica, tanto pura como aplicada.
Por ejemplo, en el campo de la matem´atica aplicada, la teor´ıa de homotop´ıa y de homolog´ıa singular tienen aplicaciones en: f´ısica (vea [3], p´ag. 19), qu´ımica (vea [5], p´ag. 2) y rob´otica (vea [20], p´ag. 95), por mencionar algunas.
algunas aplicaciones que del estudio de estas se desprendan.
Es sabido que 1896, Poincar´e con el art´ıculo “Analysis Situs”(vea [23], p´ag. 83) introdujo los grupos de homolog´ıa, adem´as de que ya contaba con conocimientos del grupo fundamental o tambi´en conocido como el primer grupo de homotop´ıa. En 1945, Eilenberg y Steenrod desarrollaron un enfoque axiom´atico de la teor´ıa de homolog´ıa. Un desarrollo paralelo ten´ıa lugar en la teor´ıa de homotop´ıa, y es as´ı como en 1935, Hurewicz define los grupos de homotop´ıa de orden superior, A partir de aqu´ı las propiedades de los grupos de homotop´ıa de orden superior comenzaron a ser investigadas.
En la actualidad, uno de los problemas m´as importantes y que a´un contin´ua abier-to, es el c´alculo de los grupos de homotop´ıa de lan-esfera,Sn.
El contenido del trabajo es el siguiente. En el Cap´ıtulo 1, se presentan conceptos b´asicos de teor´ıa de categor´ıas y funtores, pues nos ayudan a construir y definir los invariantes topol´ogicos en la teor´ıa de homotop´ıa y homolog´ıa singular. Poste-riormente definimos lo indispensable de grupos libres, productos libres y espacios conectables por trayectorias.
de aqu´ı que nos vemos en la necesidad de introducir otro invariante topol´ogico, para el cual el grupo asociado no sea tan dif´ıcil calcular.
El contenido del Cap´ıtulo 3 inicia con la definici´on de n-simplejo singular. De ah´ı partimos para definir los grupos abelianos libres generadosSn(X), donde Xes
un espacio topol´ogico yn≥0. Estos grupos son de gran importancia, pues de ellos surge la definici´on de los grupos de homolog´ıa singular,Hn(X) los cuales siempre
son abelianos a diferencia de los de grupos de homotop´ıa. Despu´es de definir los grupos de homolog´ıa singular, demostramos que el funtorHn, que toma un espacio
topol´ogico y le asocia su grupo de homolog´ıa singular es un invariante topol´ogico. En este cap´ıtulo tambi´en se define la categor´ıa Comp, donde vamos a ver una definici´on de homolog´ıa puramente algebraica. El objetivo es desarrollar resulta-dos para Comp que despu´es se trasladan a los grupos de homolog´ıa singular. Continuamos nuestro estudio con las sucesiones exactas, las cuales son de gran utilidad para c´alculos de grupos de homolog´ıa singular. Cabe mencionar que la mayor´ıa de los resultados que se enuncian en esta parte, son necesarios para la prueba del teorema de Mayer-Vietoris y las aplicaciones de la homolog´ıa singular. Otros conceptos que tambi´en se tratan son el de homolog´ıa reducida y los grupos de homolog´ıa relativa. Por ´ultimo se introducen los axiomas de escisi´on y el teo-rema de Mayer-Vietoris, que tiene la misma importancia para homolog´ıa singular, como la tiene el teorema de Seifert-Van Kampen para homotop´ıa, pues establece una relaci´on entre la homolog´ıa singular de un espacio topol´ogico y la homolog´ıa singular de sus subespacios, de tal forma que si la uni´on abierta de estos subespa-cios es todo el espacio topol´ogico y la intersecci´on es no vac´ıa, entonces es f´acil determinar la homolog´ıa de algunos espacios en t´erminos de la homolog´ıa singular de sus subespacios.
´Indice general
Agradecimientos II
Dedicatoria IV
Introducci´on V
1. Conceptos preliminares 2
1.1. Categor´ıas . . . 2
1.2. Grupos libres . . . 8
1.3. Producto libre de Grupos . . . 10
1.4. Conceptos b´asicos de espacios conectables por trayectorias . . . 13
2. Introducci´on a la homotop´ıa de espacios topol´ogicos 16 2.1. Homotop´ıa . . . 16
2.2. El funtor π0 . . . 24
2.3. El Grupo Fundamental . . . 25
2.3.1. C´alculo deπ1(S1) . . . 40
2.4. Teorema de Seifert y Van Kampen . . . 46
2.5. Homotop´ıa de dimensiones superiores . . . 55
2.5.1. Espacio de lazos . . . 56
2.5.2. H-espacio . . . . 58
3. Grupos de Homolog´ıa Singular 76
3.1. Complejos singulares y el funtor de homolog´ıa singular . . . 76
3.2. La categor´ıa Comp . . . 97
3.2.1. Homolog´ıa relativa . . . 106
3.2.2. Homolog´ıa Reducida . . . 112
3.3. Escisi´on y el Teorema de Mayer-Vietoris . . . 115
4. Aplicaciones 120 4.1. C´alculo del grupo fundamental de algunos espacios topol´ogicos . . 121
4.2. Aplicaciones del Teorema de Seifert y Van Kampen . . . 122
4.3. Aplicaciones de los grupos de Homotop´ıa de dimensiones superiores 129 4.4. Homolog´ıa de la esfera y algunas aplicaciones . . . 130
4.5. Aplicaciones sobre los espacios Euclideanos . . . 135
Conclusiones 155
Cap´ıtulo 1
Conceptos preliminares
Los preliminares en esta tesis nos dan una base te´orica necesaria, para la herra-mienta poderosa que utilizamos como es la Homotop´ıa y la Homolog´ıa Singular. Sobre categor´ıas y funtores que trataremos aqu´ı, s´olo mencionamos los aspectos que surgen de manera natural dentro del desarrollo de la tesis, al cual le damos sustento categ´orico, y a la inversa, tambi´en usamos aspectos categ´oricos para dar sustento a lo que se desarrolla.
La Homotop´ıa y la Homolog´ıa Singular surgen de caminos distintos: la primera se desarrolla a partir de una estructura algebraica intr´ınseca (grupo) del espacio, la segunda surge de una estructura algebraica que se le dota al espacio como es la de grupo libre para la cual utilizamos algunos resultados de la teor´ıa de grupos libres que se ve en este cap´ıtulo.
Por supuesto tambi´en utilizamos resultados topol´ogicos ya conocidos y que men-cionamos en estos preliminares.
1.1.
Categor´ıas
Definici´on 1.1 Una categor´ıa C consiste de una clase de objetos Obj C, un conjunto de morfismos u homomorfismos Hom(A, B) para cada par A, B∈Obj C y una composici´on◦:Hom(A, B)×Hom(B, C)−→Hom(A, C) tal que(f, g)7−→
g◦f.
Para cada par A, B∈Obj C se satisfacen los siguientes axiomas.
i) La familia deHom(A, B) son disjuntos a pares.
ii) La composici´on es asociativa siempre y cuando se defina.
iii) Para cada objeto A∈Obj C, existe una identidad1A∈Hom(A, A) que
satis-face 1A◦f = f, para cada f ∈ Hom(B, A) y todo B ∈ Obj C, y adem´as
g◦1A=g, para cada g∈Hom(A, C) y todoC∈ Obj C.
La asociatividad enii), dice que si (f◦g)◦h se define, entonces tambi´en se define f ◦(g◦h) y adem´as (f ◦g)◦h = f ◦(g◦h). A los elementos de Hom(A, B) se les llama morfismos de A en B y si f ∈ Hom(A, B) escribimos f : A → B, donde A es el dominio y B el codominio de f. Adem´as la composici´on f ◦g est´a definida si y s´olo si el codominio def es igual al dominio deg. Decimos queA esisomorfoaB si existenf ∈Hom(A, B) yg∈Hom(B, A) tales quef◦g= 1B
y g◦f = 1A. Si no hay confusi´on a f ∈Hom(A, B) se le llama funci´on, funci´on
continua, funci´on derivable, funci´on anal´ıtica, morfismo de grupo, morfismo de anillos, etc., dependiendo de la categor´ıa en que se est´e trabajando. C consta de Obj C pero no necesariamente es un conjunto, en tal caso decimosclase.
Por otro lado, de la Definici´on 1.1iii) el conjuntoHom(A, A)6=∅, para todaA∈ C. Las categor´ıas dependen estrictamente de los tres ingredientes, puede ser que sean los mismos objetos pero diferentes morfismos; en tal caso corresponden a categor´ıas distintas o cualquier otra variante de estas componentes deC pueden modificarla para dar otras categor´ıas. Los siguientes ejemplos se mencionan de manera natural y reflejan un sentido m´as amplio (categ´orico) de la matem´atica construida.
Ejemplo 1.1
1. La categor´ıa Sets de los conjuntos donde Obj C consta de la clase de todos los conjuntos,Hom(A, B) ={f :A→B |f es funci´on} y la composici´on es la composici´on usual de funciones.
3. La categor´ıa Top2 de los espacios topol´ogicos de parejas con Obj C consta de la clase de todas la parejas (X, A) donde X es un espacio topol´ogico y
A un subespacio de X, Hom((X, A),(Y, B)) = {f : (X, A) → (Y, B) | f es una funci´on continua de X en Y tal quef(A)⊆B } y la composici´on es la composici´on usual de funciones. Si en particularA={∗}, entonces tenemos C=Top∗ (la categor´ıa de los espacios topol´ogicos punteados).
4. La categor´ıaGrup de los grupos dondeObj C consta de la clase de todos los grupos, Hom(A, B) ={f :A→B |f es morfismo de grupos} y la composi-ci´on es la composicomposi-ci´on usual. Podemos tambi´en definir de manera semejante C=Ab,Ring,Ring1 yR−Mod,etc., la categor´ıa de los grupos abelianos, de anillos, de anillos con identidad, y de R-m´odulos, respectivamente, as´ı co-mo otras estructuras algebraicas con sus correspondientes co-morfisco-mos.
Notemos que en 1 y 2 del Ejemplo 1.1 ocurre lo siguiente:
i) Los objetos deTop1 son objetos deSets.
ii) Si Hom(A, B) est´a definido por Sets y Hom(A, B)0 por Top1 se tiene que
Hom(A, B)0 ⊆Hom(A, B) para todo A, B.
La observaci´on anterior nos motiva a la siguiente definici´on.
Sean C y A categor´ıas con Obj C ⊂ Obj A. Si A, B ∈ Obj C, denotan los dos conjuntos de homomorfismos Hom por HomC(A, B) y HomA(A, B) decimos que C es una subcategor´ıa de A si HomC(A, B) ⊂ HomA(A, B), para todo
A, B ∈ Obj C y si la composici´on en C es la misma composici´on en A, es de-cir, la funci´on HomC(A, B)×HomC(B, C) →HomC(A, C) es la restricci´on de la composici´on correspondiente en A. De la Definici´on 1.1, podemos construir sub-categor´ıas manteniendo fijoHom(A, B) para cadaA, By tomando una restricci´on de los objetos en la categor´ıa, o tambi´en mantener los objetos de la categor´ıa y que cumplan la condici´on HomC(A, B) ⊂ HomA(A, B) para todoA, B ∈Obj C.
Ilustramos esto en los siguientes ejemplos.
Ejemplo 1.2
1. En la categor´ıa de Top1 si restringimos sus objetos a espacios Euclideanos, espacios Hausdorff, etc. y los morfismos coinciden con los morfismos de
2. Top∗ es una subcategor´ıa deTop2. 3. Abes una subcategor´ıa de Grup. 4. Ring1 es una subcategor´ıa deRing.
Es importante ver algunos conceptos categ´oricos que nos permiten dar una visi´on m´as amplia sobre conceptos como producto, coproducto o propiedades univer-sales, los cuales son indispensables, en nuestro caso, en la categor´ıa de los espacios topol´ogicos, de pareja o punteados, as´ı como propiedades topol´ogicas que se deri-ven de estos.
Cuando se trata de construir otros espacios topol´ogicos se recurre de manera natu-ral a la construcci´on del producto y coproducto en la categor´ıa de los espacios topol´ogicos, de pareja o punteados y esta construcci´on categ´orica, no s´olo es ´util en nuestro trabajo, sino en general en toda la matem´atica.
Definici´on 1.2 Sean C una categor´ıa y {Ai |i∈I} una familia de objetos en C.
i) Un producto para la familia {Ai | i ∈ I} es un objeto P en C junto con la
familia de morfismos {πi : P → Ai | i ∈ I} tal que para un objeto B y una familia de morfismos {ϕi :B → Ai |i ∈I}, existe un ´unico morfismo
ϕ:B →P tal que πi◦ϕ=ϕi.
El dual se define como,
ii) Un coproducto (o suma ) para la familia {Ai | i ∈ I} es un objeto P en
C junto con la familia de morfismos {ιi : Ai → P | i∈ I} tal que para un
objeto B y una familia de morfismos {ϕi :Ai →B |i∈I}, existe un ´unico morfismo ϕ:P →B tal queϕ◦ιi =ϕi.
Una observaci´on interesante que podemos hacer notar es que tanto el producto como el coproducto son ´unicos salvo isomorfismos, de hecho esta observaci´on no es dif´ıcil de comprobar.
Las definiciones anteriores se pueden ilustrar como diagramas, los cuales nos per-miten entender de forma categ´orica estos conceptos como se muestra a continua-ci´on.
-@ @ @ @ @ @ @@R ?
P Ai
B
ϕi
ϕ
πi
πi◦ϕ=ϕi, i∈I
Producto -@ @ @ @ @ @ @ @ I 6
Ai P
B
ϕ ϕi
ιi
ϕ◦ιi =ϕi, i∈I
Coproducto
El producto de la familia {Ai | i ∈ I} se denota por
Y
i∈I
Ai y el coproducto por
a
i∈I
Ai. En particular si|I |= 2, entonces tanto el producto como el coproducto los
denotamos porA1×A2 yA1
`
A2, respectivamente.
Cabe mencionar que en las categor´ıasSets,Grup,Top1 entre otras, la Definici´on
1.2 de producto y coproducto coincide con la definiciones usuales de producto cartesiano y suma directa, respectivamente.
En caso de que la categor´ıa seaTop1 la topolog´ıa que corresponde a la definici´on
de producto es la topolog´ıa producto cartesiano (vea [10], p´ag. 98).
Definici´on 1.3 Si A y C son categor´ıas, un funtor (covariante) T :A → C es una asociaci´on de correspondencia que cumple:
i) Si A∈ Obj A, entoncesT(A)∈Obj C.
ii) Si f : A → A0 es un morfismo en A, entonces T(f) : T(A) → T(A0) es un morfismo enC.
iii) Si f y g son dos morfismos en A para el cual g ◦f est´a definido, entonces
T(g◦f) =T(g)◦T(f).
iv) T(1A) = 1T(A), para todoA∈Obj A.
Definici´on 1.4 Un funtor contravariantecumplei)yiv) de la Definici´on 1.3 y en lugar de ii)y iii) se cumple:
iii’) Sif, gson morfismos en Apara el cualg◦f est´a definido, entoncesT(g◦f) = T(f)◦T(g).
En nuestro caso estudiamos los funtoresπnyHn, paran≥0. Estos funtores son el
n-´esimo grupo de Homotop´ıa y el n-´esimo grupo de Homolog´ıa (singular), donde π0 :Top1 →Sets,π
n:Top∗ →Grup yHn:Top1 →Grup.
El prop´osito de estudiar estos funtores es que nos permiten resolver problemas topol´ogicos pas´andolos a problemas algebraicos; como veremos en los siguientes cap´ıtulos de esta tesis, sobre todo en el de las aplicaciones.
A continuaci´on se muestran ejemplos de funtores covariantes.
Ejemplo 1.3 Consideremos el funtor c.p.t.(−) : Top1 → Sets ver Secci´on 1.4 definido por c.p.t.(X) como el conjunto de componentes por trayectorias de X y
c.p.t.(f)(C) = [f(C)], donde[f(C)]es la componente por trayectoria que contiene a f(C) para todo C en c.p.t.(X).
Ejemplo 1.4
Si C es una categor´ıa y X0 ∈ Obj C, entonces Hom(X0,−) : C → Sets tal que
X7→Hom(X0, X), es un funtor.
En efecto, veamos que se cumplen las propiedades de funtor.
i) De la definici´on deHom(X0, X), esta propiedad se cumple claramente.
ii) Seaf :X→Y un morfismo enC, yg∈Hom(X0, X). DefinimosHom(f)(g) = f◦g, el cual claramente es un morfismo en Sets.
iii) Seanf :X→Y y g:Y →Z morfismos enC, yh∈Hom(X0, X), entonces
Hom(g◦f)(h) = (g◦f)◦h = g◦(f ◦h) = Hom(g)◦(f ◦h)
= Hom(g)◦Hom(f)(h)
iv) Sea 1X : X → X el morfismo identidad en C, y h ∈ Hom(X0, X), entonces
Hom(1X)(h) = 1X ◦h=h= 1Hom(X0,X)(h).
Definici´on 1.5 Sean C y D dos categor´ıas y F, G : C → D dos funtores. Una
transformaci´on natural t de F a G,t:F →Ges una colecci´on de morfismos
tA:F(A)→ G(A) en D, uno para cada objeto A∈ Obj C tal que para cualquier
morfismo f :A→B enC el siguiente diagrama conmuta, es decir, G(f)◦(tA) =
tB◦(F(f)). Si esto sucede, decimos quetA:F(A)→G(A)es natural, en particu-lar si tA :F(A) → G(A) es un isomorfismo para cada A ∈ C, entonces decimos
que tes una equivalencia y,F y G son equivalentes en forma natural.
F(A) tA //
F(f)
²
²
G(A)
G(f)
²
²
F(B)
tB
/
/G(B).
1.2.
Grupos libres
En esta secci´on nos ocupamos de ilustrar algunas nociones de la teor´ıa de grupos, como lo son los grupos libres. En particular los grupos abelianos libres, pues en el Cap´ıtulo 3, la homolog´ıa singular se construye asociando a un espacio topol´ogico la estructura de grupo abeliano libre.
Recordemos que un homomorfismo o morfismo de grupos, es una funci´on f :G→H, dondeGyH son grupos, tal quef(ab) =f(a)f(b) para todoa, b∈G. Si f es sobreyectiva, entonces se llama epimorfismo y si f es inyectiva se dice quef es unisomorfismo de grupos. Diremos queGyH son isomorfos si existe un isomorfismo f :G→H y se denota porG∼=H.
Definici´on 1.6 Sean X un conjunto no vac´ıo y F un grupo. Se dice que F es
grupo libre en X cuando existe una funci´on inyectiva i : X → F tal que para toda funci´onf :X→G, donde G es un grupo, existe un ´unico morfismo de grupos
g:F →G que hace conmutativo el diagrama siguiente
X i //
fBBBBÃÃ B B B
B F
g
²
²
G.
Para todo conjunto no vac´ıo X, siempre existe un grupo libre F en X, que es ´
i:X →F, i0 :X →F0 y morfismos ´unicosϕ:F → F0 yψ :F0 → F que hacen
conmutativos los diagramas:
X i //
i0 Ã Ã A A A A A A A A F ϕ ² ² F0
X i //
i0 ! ! B B B B B B B B F ψ ² ²
F0.
As´ı,i0=ϕ◦i;i=ψ◦i0; y entoncesψ◦ϕhace conmutativo el diagrama
X i //
iAAAAÃÃ A A A A F ψ◦ϕ ² ² F.
El ´unico morfismo con tal propiedad es la identidad enF. Esto implica queψ◦ϕ es la identidad en F. De manera similar, ϕ◦ψ es la identidad en F0, por lo que
ϕ:F →F0 es un isomorfismo.
La existencia del grupo libreF enX se puede ver [16], p´ag. 39.
El siguiente teorema caracteriza a los grupos.
Teorema 1.1 Todo grupo es cociente de un grupo libre.
Demostraci´on. Si G es un grupo y A ⊆ G es tal que G = hAi, donde hAi es el grupo generado por A, entonces la inclusi´on j : A → G se puede extender de manera ´unica a un epimorfismo η:F →GconF grupo libre enA. SiR =ker η, entonces de los teoremas de isomorfismos de grupos (vea [11], p´ag. 108)F/R∼=G.
¤
Decimos queRes elgrupo de relacionesdeGy queAes unsistema de gene-radores de G, mientras que un conjunto B de generadores de R es un sistema de relacionesde G. La construcci´on anterior deGse llamapresentaci´on deG.
Ejemplo 1.5 El grupo libre con un generador es el grupo aditivoZ.
Si F es un grupo libre en X, entonces consideramos el grupo derivado R =
f :X → H, dondeH es un grupo abeliano, siempre existe un ´unico morfismo de gruposρ:G→H que hace conmutativo el siguiente diagrama:
X i //
fAAAAÃÃ
A A A A G ρ ² ² H
Esta propiedad la podemos usar para caracterizar al grupo abeliano libre enX o usarla como definici´on.
En todo caso, el grupo abeliano libre en un conjunto X resulta ser isomorfo al producto directo de copias del grupo aditivo Z, requiri´endose tantas copias de Z
como elementos tengaX.
1.3.
Producto libre de Grupos
En esta secci´on se estudia el producto libre de grupos, ya que en la Secci´on 2.4 se hace referencia a definiciones y propiedades que a continuaci´on presentamos. SeanG1 yG2 grupos. Nos interesa definir un grupoG1∗G2 que cumpla:
a) G1∗G2 no abeliano.
b) G1 yG2 contenidos enG1∗G2 como subgrupos.
c) G1∗G2 generado por la uni´on G1∪G2.
d) G1∗G2 no satisface g1·g2=g2·g1 para todog1∈G1 yg2 ∈G2.
El coproducto G1`G2 en la categor´ıa Grup, cumple con las condiciones de a)
a d) y no la suma directa G1 ⊕G2 como podr´ıa pensarse, pues no cumple la
propiedad universal del coproducto. En efecto, supongamos quei1 :G1 →G1⊕G2
e i2 : G2 → G1⊕G2 son las inclusiones, H un grupo cualquiera, f1 : G1 → H, f2 : G2 → H morfismos de grupos y f : G1 ⊕G2 → H el ´unico morfismo de
grupos que satisface la propiedad universal del coproducto enGrup, definido por f(g, h) = f1(g)f2(h), para g∈ G1 yh ∈G2, que satisfacen el siguiente diagrama
conmutativo:
G1Â Ä i1 //
f1 IIII$$ I I I I I
I G1⊕G2 oo i2 ? _
f
²
²
Â
Â
 G2
Sean (g, h),(g0, h0) ∈ G
1 ⊕G2, entonces f((g, h)(g0, h0)) = f1(g)f1(g0)f2(h)f2(h0),
es decir, f no puede ser un morfismo de grupos a menos que H sea abeliano contradici´endose la propiedad universal. EntoncesG1
`
G2 6=G1⊕G2.
Definici´on 1.7 Sea {Gi | i ∈ J } una familia de grupos, el producto libre de grupos de la familia{Gi|i∈ J } denotado por ∗Gi, coni∈ J, se define como el
coproducto de {Gi |i∈ J }en la categor´ıa Grup.
En particular para G1 y G2 grupos, el producto libre de G1 y G2 se denota por
G1∗G2.
Teorema 1.2 Si {Gi |i∈ J } es una familia de grupos, entonces existe siempre
su producto libre.
Demostraci´on. Definimos como una palabra en los Gi a una sucesi´on finita
(x1, . . . , xn), donde cada xk pertenece a alguno de los grupos Gi, dos t´erminos
consecutivos en la sucesi´on pertenecen a distintos grupos, y no hay t´ermino (de la sucesi´on) que sea el neutro de alg´un Gi. El entero n se llama la longitud de
la palabra. Consideremos tambi´en la palabra vac´ıa, es decir, la ´unica palabra de longitud 0. Designemos porW el conjunto de todas estas palabras.
Para cada ´ındicei, definimos ahora una operaci´on (acci´on de grupos) por la izquier-da del grupo Gi sobre el conjunto W. Sea g ∈ Gi y (x1, . . . , xn) ∈ W, definimos
g(x1, . . . , xn) por
Caso 1 Sixi∈/ Gi, entonces
g(x1, . . . , xn) =
½
(g, x1, . . . , xn) sig6= 1
(x1, . . . , xn) sig= 1.
Definimos la acci´on deg sobre la palabra vac´ıa porg( ) = (g).
Caso 2 Sixi∈Gi, entonces
g(x1, . . . , xn) =
½
(gx1, x2, . . . , xn) sigx1 6= 1
(x2, . . . , xn) sigx1 = 1.
Notemos que si gx1 = 1 yn= 1, entonces g(x1) es la palabra vac´ıa.
Observemos que se cumple
1w = w
Es decir, la operaci´on por la izquierda del grupoGi sobre W es una acci´on.
Est´a claro que cada uno de los gruposGi act´uan efectivamente sobreW.
Seang, g−1∈Gi yφg, φg−1 :W →W, definido porφg(w) =gw,φg−1(w) =g−1w,
respectivamente. Comoφg−1◦φg =φg◦φg−1 = 1W, entoncesφg es un isomorfismo.
As´ı, cada elemento g de Gi se identifica como una permutaci´on del conjunto W
y Gi se considera como un subgrupo del grupo de todas las permutaciones de
W. Denotamos por G el subgrupo del grupo de todas las permutaciones de W generado por la uni´on de losGiy los elementos deGse expresan como un producto
finito de elementos de losGi, si dos factores consecutivos pertenecen al mismoGi.
Evidentemente pueden ser reemplazados por un s´olo factor. As´ı, todo elemento g 6= 1 de G se expresa como un producto finito de elementos de los Gi en forma
reducida, o sea, que no existen dos factores consecutivos que pertenezcan al mismo grupo, y ning´un factor es el elemento neutro. Adem´as,Gcontiene a cada Gi como
subgrupo, denotamos por
ιi :Gi →G
la correspondiente inclusi´on. Afirmamos ahora que la expresi´on de todo elemento g 6= 1 de G en forma reducida es ´unica. En efecto, sean g1g2. . . gm y h1h2. . . hn
dos representaciones reducidas deg6= 1.
Consideremos el efecto de las permutacionesg1g2. . . gmyh1h2. . . hnsobre la
pala-bra vac´ıa; resultan, entonces, las palapala-bras (g1, g2, . . . , gm) y (h1, h2, . . . , hn),
respec-tivamente. Puesto que estas dos palabras deben ser iguales, las dos expresiones anteriores son id´enticas. Por tanto,m=ny gi =hi para 1≤i≤m.
Seag1. . . gn la representaci´on reducida de g 6= 1 enG, entonces la representaci´on
reducida del inverso de ges g−1
n . . . g1−1.
Es f´acil comprobar queGes efectivamente el producto libre de losGirespecto losιi.
En efecto, seaHun grupo arbitrario yψi:Gi →H,i∈ J, una colecci´on arbitraria
de morfismos de grupos. Definimos un ´unico morfismo de grupos f :G→H por
f(g) = (ψi1g1)(ψi2g2). . .(ψimgm),
donde g = g1g2. . . gm, gk ∈ Gik, 1 ≤ k ≤ m y g 6= 1 est´a en forma reducida.
Desde luego suponemos f(1) = 1 y hace conmutativos todos los diagramas del
1.4.
Conceptos b´
asicos de espacios conectables por
trayec-torias
En esta secci´on se presentan las propiedades de espacios conectables por trayecto-rias, que se utilizan en el desarrollo de la tesis.
Definici´on 1.8 SeaX un espacio topol´ogico. Unatrayectoria en Xes una fun-ci´on continua f :I → X, donde I = [0,1]. Si f(0) =a y f(1) =b decimos que f es una trayectoria de a a b.
Observemos que la trayectoria es la funci´onf y no la imagen,f([0,1]); a la imagen le llamamos curva enX. Notemos que g:I →X definida porg(t) =f(1−t), es una trayectoria deba a.
Definici´on 1.9 Sea X un espacio topol´ogico. Si p ∈ X, entonces ip : I → X
definida por ip(t) = p para todo t∈I se llama trayectoria constante en p. Si
f : I → X es una trayectoria, entonces su trayectoria inversa f−1 : I → X
est´a definida porf−1(t) =f(1−t), para cada t∈I.
Definici´on 1.10 Un espacio topol´ogico X, es conectable por trayectorias si para cualesquieraa, b∈X existe una trayectoria dea a b.
Ejemplo 1.6 Recordemos que un subespacio topol´ogico X en Rn se dice que es
convexo cuando, para todo par de puntos x, y ∈ X, el segmento de recta que une a x con y denotado por [x, y] = {(1−t)x+ty | 0 ≤ t ≤ 1} est´a contenido en X. De donde, todo subespacio topol´ogico convexo es un espacio conectable por trayectorias.
El siguiente lema es importante ya que a lo largo de la tesis se menciona con regularidad.
Lema 1.1 (Lema del pegado) Supongamos que un espacio topol´ogico X es la uni´on finita de subespacios cerrados Xi, es decir, X = Sni=1Xi. Si para alg´un espacio Y y para cada i = 1, . . . , n existe una funci´on continua fi : Xi → Y tal que
fi|Xi∩Xj=fj |Xi∩Xj i6=j, entonces existe una ´unica funci´on continuaf :X→Y
con f |Xi=fi para todo i.
Demostraci´on. Vea [15], p´ag. 15.
Bajo las hip´otesis del Lema 1.1. Si g:X→Y tal queg|Xi=fi, entoncesg=f y
Teorema 1.3 Sea X un espacio topol´ogico, la relaci´on,∼, enX definida pora∼b
si y s´olo si existe una trayectoria de aa b es una relaci´on de equivalencia.
Demostraci´on. Vea [14], p´ag. 160.
Definici´on 1.11 Las clases de equivalencia definidas por la relaci´on, ∼ de la hip´otesis del Teorema 1.3, se llaman componentes por trayectorias de X.
A las componentes por trayectorias de un espacio topol´ogicoX, las denotamos por c.p.t. X.
Para terminar este cap´ıtulo es necesario establecemos la siguiente notaci´on. De aqu´ı hasta el final de la tesis cuando digamos espacio nos referimos a un espacio topol´ogico. Denotamos al intervalo cerrado [0,1] por I. El producto cartesiano de r copias deI se denota por Ir. SiX yY son espacios topol´ogicos homeomorfos lo
denotamos porX ≈Y.
El conjuntoSn={x∈Rn+1 | kxk= 1}es lan-esferayDn={x∈Rn | kxk ≤1}
Cap´ıtulo 2
Introducci´
on a la homotop´ıa de
espacios topol´
ogicos
2.1.
Homotop´ıa
Seanαyβtrayectorias en un espacio topol´ogicoX. Siα,βtardan en ir de su punto inicial a su punto final un segundo,α(2t) yβ(2t−1) son trayectorias que hacen el mismo recorrido queαyβen la mitad de tiempo. Si el punto final deαes el punto inicial deβ, se define una trayectoria nueva que recorre en un segundo los caminos deαyβ, a saberα∗β. Esta es una manera de operar trayectorias y en este cap´ıtulo se busca encontrar las condiciones necesarias y suficientes, que asocie a un espacio topol´ogico un grupo, el grupo fundamental π1(X), y m´as general πn(X), n ≥1. Adem´as se verifica que esta asociaci´on es funtorial. Las condiciones necesarias se obtienen de introducir curvas homot´opicas y las condiciones de suficiencia de pedir que las trayectorias est´en basadas en un punto, con el mismo punto inicial y final.
Definici´on 2.1 Si X,Y son espacios y f0,f1 son funciones continuas de X en Y decimos que f0 es homot´opica a f1 (f0 ' f1), si existe una funci´on continua
H:X×I →Y tal que H(x,0) =f0(x) y H(x,1) =f1(x) para toda x∈X.
A la funci´onH se le llamahomotop´ıa.
Con H:f0 'f1 indicamos que f0 'f1 con homotop´ıaH. Una interpretaci´on de
f
00 0 b).
f
1X
a f
a). ´ ´
α
x 0
Deformacion Homotopica de una curva a un punto. Deformacion Homotopica de ff0 a f1.
Figura 2.1: Deformaci´on homot´opica.
conHt(x) =H(x, t) tal que deforma f0 a f1 al tiempo tcomo muestra la Figura
2.1a).
El siguiente ejemplo muestra la deformaci´on homot´opica de una trayectoria a una trayectoria constante.
Ejemplo 2.1 Consideremos un subespacio convexo X en R2, una trayectoria α
de X y un punto x0 ∈X como se muestra en la Figura 2.1b). Sea H :α'x0 la homotop´ıa dada porH(s, t) = (1−t)α(s) +x0t. La familia de curvasHtno tienen
diferencia alguna bajo este concepto de homotop´ıa, como veremos en el Teorema 2.1. N´otese que se puede generalizar la homotop´ıa para cualquier subespacio con-vexo enRn por H(x, t) =x(1−t) +x0tdonde H : 1X 'c
(con c : X → X denotamos la funci´on constante dada por c(x) = x0 para toda
x∈X).
Teorema 2.1 La relaci´on (') de homotop´ıa es una relaci´on de equivalencia sobre el conjunto de todas las funciones continuas= de X a Y.
Demostraci´on.
ii) Sean f, g ∈ = tal que H : f ' g. Definimos G : X ×I → Y por G(x, t) = H(x,1−t). ClaramenteGes continua, pues la composici´on de funciones con-tinuas es continua. Adem´as G(x,0) =H(x,1) =g(x) yG(x,1) =H(x,0) = f(x). As´ı, G:g'f.
iii) Seanf, g, h∈ = tales queH :f 'gyG:g'h. DefinimosK :X×I →Y por
K(x, t) =
½
H(x,2t) si 0≤t≤ 12
G(x,2t−1) si 12 ≤t≤1.
Dado queK(x,1
2) = H(x,1) =G(x,0) =g(x), entonces por el Lema 1.1 se
tiene queK es una funci´on continua. Adem´as,K(x,0) =H(x,0) =f(x) y
K(x,1) =G(x,1) =h(x). As´ıK:f 'h. ¤
Sea f : X → Y una funci´on continua. Su clase de equivalencia definida por la relaci´on ', [f] = {g :X → Y continua | g ' f} se llama clase de homotop´ıa
y la familia de todas las clases de homotop´ıa se denota por [X, Y]. Ahora, bajo el concepto de homotop´ıa, toda la familia de funciones continuas Ht que deforman una en la otra son parte de la clase de homotop´ıa def.
SeanX yY espacios. Una funci´onf :X→Y esnulo homot´opicasi existe una funci´on constantec:X→Y,c(x) =y0, tal quef 'c. As´ı [c] consta de todas las funciones homot´opicas que se deforman a una constante. En particular, decimos queX escontra´ıble si 1X es nulo homot´opica, por tanto, todo conjunto convexo
es contra´ıble como se muestra en el Ejemplo 2.1.
Debemos observar que si α, β son dos trayectorias homot´opicas en un espacio topol´ogico X y sif :X → Y es continua, entonces las trayectorias f ◦α y f ◦β tambi´en se deforman una en la otra de manera continua enY; en otras palabras son homot´opicas. Equivalentemente,f#: [I, X]→[I, Y] dada por f#[α] = [f◦α]
est´a bien definida si y s´olo si f ◦α 'f ◦β, siempre que α ' β. El Teorema 2.2 que a continuaci´on presentamos generaliza esta observaci´on.
Teorema 2.2 Sean fi :X → Y y gi :Y → Z para i= 0,1 funciones continuas.
Si f0 'f1 y g0 'g1, entonces g0◦f0 'g1◦f1, es decir, [g0◦f0] = [g1◦f1].
Demostraci´on. Supongamos que F : f0 ' f1 y G : g0 ' g1 son homotop´ıas
y consid´erese la funci´on H : X ×I → Z definida por H(x, t) = G(f0(x), t).
se tiene que para cada x ∈ X, H(x,0) = G(f0(x),0) = g0(f0(x)) = g0◦f0(x) y
H(x,1) =G(f0(x),1) =g1(f0(x)) =g1◦f0(x) de aqu´ı queH:g0◦f0 'g1◦f0. Por
otro lado, seaK:X×I →Zdefinida porK(x, t) =g1◦F(x, t), entoncesK(x,0) =
g1(F(x,0)) = g1(f0(x)) = g1 ◦f0(x) y K(x,1) = g1(F(x,1)) = g1(f1(x)) = g1 ◦
f1(x). Es claro que K es una funci´on continua. As´ı, K : g1 ◦f0 ' g1 ◦f1. Con
esto, dado que la relaci´on 'es transitiva, se tiene queg0◦f0 'g1◦f1. Por tanto
[g0◦f0] = [g1◦f1] ¤
Corolario 2.1 Sea h :Y →Z continua. Entonces h#: [X, Y]→[X, Z] dada por
h#[f] = [h◦f] est´a bien definida.
Demostraci´on. Del Teorema 2.2, tomando h = g0 = g1 y f = f0, g = f1 se
cumple que si f 'g, entonces h◦f 'h◦g. De donde h#(f) = [h◦f] est´a bien
definida. ¤
El siguiente teorema caracteriza en t´erminos homot´opicos las funciones continuas nulo homot´opicas de lan−esfera, Sn, a un espacio topol´ogico.
Teorema 2.3 Sean Y espacio topol´ogico yf :Sn→Y una funci´on continua. Las siguientes condiciones son equivalentes:
i) f es nulo homot´opica.
ii) f se puede extender a una funci´on continua g:Dn+1 →Y.
iii) Si x0 ∈ Sn y k : Sn → Y es la funci´on constante f(x
0), entonces existe una homotop´ıa H:f 'k tal queH(x0, t) =f(x0) para toda t∈I.
Demostraci´on.
i→ ii) Supongamos que f es nulo homot´opica, es decir, existe H : f ' k donde k(x) =y0 para todax∈Sn yy0∈Y. Seag:Dn+1→Y definida por
g(x) =
½
y0 si 0≤ kxk ≤ 12
H( x
Si x ∈ Dn+1 y kxk = 1
2, tenemos que g(x) = y0 y por otro lado g(x) =
H(x
2,1) = k(x2) =y0. Del Lema 1.1 y dado que H es continua tenemos que
g es continua. Por ´ultimo, si x∈Sn, entonces g(x) =H(kxxk,0) = f(kxxk) = f(x), de aqu´ı que g|Sn =f para toda x∈Sn. Por tanto, g es una extensi´on
de f.
ii→ iii) Supongamos que g : Dn+1 → Y es una extensi´on continua de f. Sea H : Sn ×I → Y dada por H(x, t) = g((1−t)x+tx
0) con x, x0 ∈ Sn.
Claramente H es continua. M´as a´un, se tiene que H(x,0) =g(x) =f(x) y H(x,1) =g(x0) =f(x0) =k(x). Adem´as, H(x0, t) = g(x0) = f(x0) = k(x)
para todat∈I.
iii→ i) Suponiendo la homotop´ıa H : f ' k, con k(x) = f(x0), f es nulo
ho-mot´opica, se tiene la conclusi´on. ¤
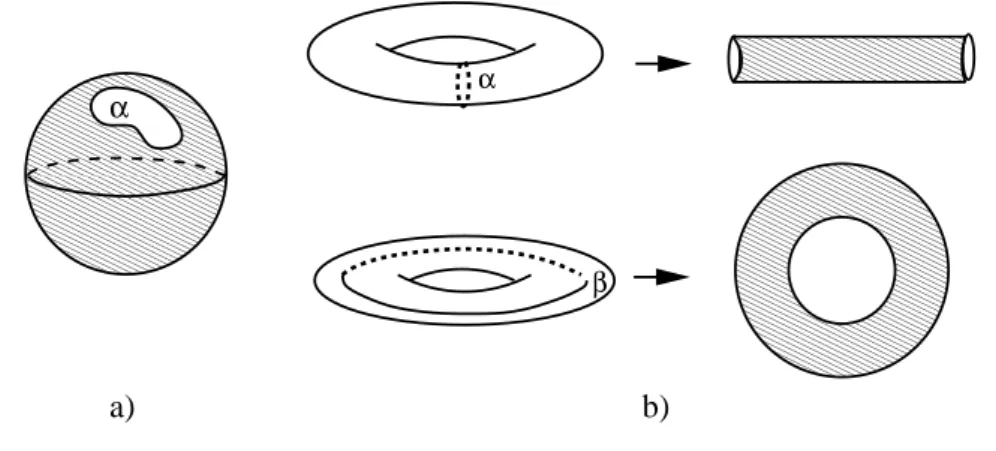
Que dos espacios sean del mismo tipo de homotop´ıa significa que uno de estos
b) a)
Figura 2.2: Espacios con el mismo tipo de homotop´ıa.
Para describir matem´aticamente esta idea verifiquemos i),ii) y iii) de la Defini-ci´on 1.1 de categor´ıa para htop, la categor´ıa de todos los espacios topol´ogicos homot´opicos, dondeObjhtopconsta de la clase de todos los espacios topol´ogicos, Hom(X, Y) = [X, Y] y la composici´on est´a definida por [f]•[g] = [g◦f]. Observe-mos que la composici´on est´a bien definida por el Teorema 2.2.
Verifiquemos que en efecto htop es una categor´ıa. Si [X, Y]∩[X0, Y0] 6= ∅, en-tonces [f] ∈ [X, Y]∩[X0, Y0] siempre y cuando X = X0 y Y = Y0, y por tanto [X, Y] = [X0, Y0]. En otras palabras [X, Y] y [X0, Y0] son disjuntos a pares. As´ıi)
se sigue. Paraii), observemos que ([f]•[g])•[h] = [(g◦f)]•[h] = [h◦(g◦f)] = [(h◦g)◦f] = [f]•[h◦g] = [f]•([g]•[h]) prueba ii). Finalmente 1X = [idX] es
identidad por la derecha como por la izquierda, entonces se sigue iii) y con todo
htopes una categor´ıa.
Por otro lado, en la categor´ıa Grup, decir que G y G0 son equivalentes significa
G∼=G0. En Top1,X yY son equivalentes si X ≈Y. En la categor´ıa htopdecir
queX yY son equivalentes significa que son del mismo tipo de homotop´ıa (es de-cir, se deformaX en Y de manera homot´opica). Esto es, existe [f]∈Hom(X, Y) y [g]∈Hom(Y, X) tal que [f]•[g] = [idX] y [g]•[f] = [idY], o equivalentemente
la Definici´on 2.2, como veremos m´as adelante.
Cabe mencionar que R2 y C se pueden ver topol´ogicamente iguales, pero
alge-braicamente diferentes.
La categor´ıahtop∗ es similar ahtop excepto queObj htop∗ es la clase de todos los espacios topol´ogicos punteados, Hom((X, x0),(Y, y0)) = [(X, x0),(Y, y0)] y la
composici´on est´a definida por [f]•[g] := [g◦f], donde ◦ es la composici´on de espacios punteados. Vea [22], p´ag. 12.
Definici´on 2.2 Sean X y Y espacios topol´ogicos. Una funci´on continuaf :X →
Y es una equivalencia homot´opica si existe g : Y → X continua, tal que
g◦f 'idX yf◦g'idY. Los espaciosXyY son delmismo tipo de homotop´ıa
si existe una equivalencia homot´opicaf :X→Y.
Durante toda la tesis denotamos a la funci´on identidad de un conjuntoX, por 1X.
Teorema 2.4 Un espacio X tiene el mismo tipo de homotop´ıa de un punto si y s´olo si X es contra´ıble.
Demostraci´on. Supongamos queXes del mismo tipo de homotop´ıa de Y ={a}. Entonces existen funciones continuas f :X → {a} y g:{a} →X cong(a) = x0,
tales queH:g◦f '1X yG:f◦g'1Y. M´as a´un,g◦f(x) =g(f(x)) =g(a) =x0,
dondex0 ∈X. De aqu´ı que H:x0'1X. Por lo tanto, X es contra´ıble.
Supongamos ahora queX es contra´ıble, es decir, existeH : 1X 'x0 con x0 ∈X. Definimos f : X → {x0} como la funci´on constante en x0 y g : {x0} → X por
g(x0) = x0. N´otese que f◦g = 1{x0} y que, por hip´otesis, g◦f =x0 '1X. De
aqu´ı queX yx0 tienen el mismo tipo de homotop´ıa. ¤
Teorema 2.5 Sean X yY espacios topol´ogicos. Si Y es contra´ıble, entonces cua-lesquiera dos funciones continuas deX enY son homot´opicas.
Demostraci´on.Dado queY es contra´ıble, entonces existeH:Y×I →Y continua tal queH : 1Y 'y0, para y0 ∈Y. Definimos f :X→ Y por f(x) =y0 para toda
x∈X. Seag:X→Y una funci´on continua arbitraria. Consideremos la siguiente funci´on G:X×I →Y dada por G(x, t) =H(g(x), t). As´ı pues,
G(x,0) =H(g(x),0) =g(x) y G(x,1) =H(g(x),1) =y0
de aqu´ı que G:g'y0. As´ıf 'g. Por la transitividad de la relaci´on'se sigue el
resultado. ¤
El Ejemplo 2.1 es muy importante para intuir conceptos que se puedan extender. Observemos que el subespacio {x0} ⊆ X es del mismo tipo de homotop´ıa de X.
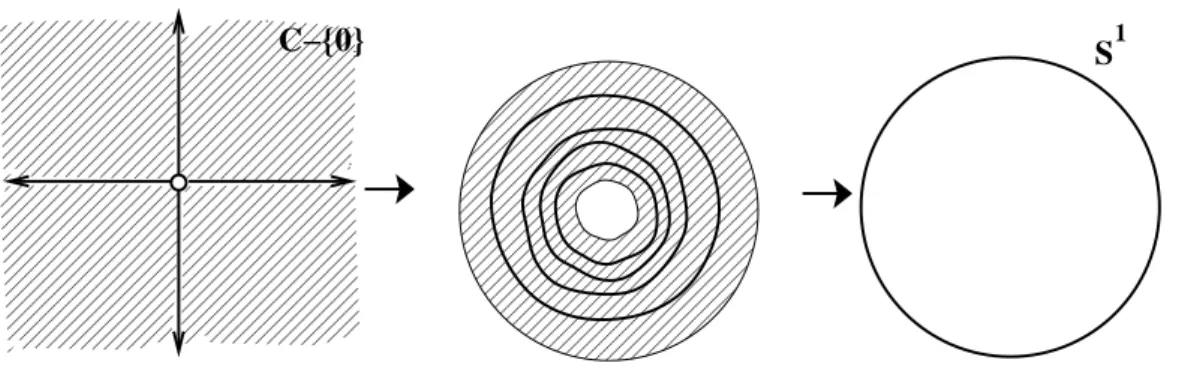
Luego nos cuestionamos ¿cu´ales son las condiciones suficientes para que un subes-pacioAsea del mismo tipo de homotop´ıa del espacio totalX? es decir, ¿cu´ando se deforma homot´opicamente el espacioX al subespacio A? como vamos a ver en el Ejemplo 2.2 el plano complejo menos el origen (o cualquier otro punto) se puede deformar a S1. Con el Teorema 2.6 que anunciamos m´as adelante, contestamos a
las interrogantes anteriores.
Definici´on 2.3 SeanA un subespacio deX ei:A ,→X la inclusi´on. EntoncesA
es unretracto de deformaci´on de Xsi existe una funci´on continua r:X →A
00000000 00000000 00000000 00000000 00000000 00000000 00000000 11111111 11111111 11111111 11111111 11111111 11111111 11111111 00000000 00000000 00000000 00000000 00000000 00000000 00000000 11111111 11111111 11111111 11111111 11111111 11111111 11111111 000000000 000000000 000000000 000000000 000000000 000000000 000000000 000000000 111111111 111111111 111111111 111111111 111111111 111111111 111111111 111111111 000000000 000000000 000000000 000000000 000000000 000000000 000000000 000000000 111111111 111111111 111111111 111111111 111111111 111111111 111111111 111111111
C−{0} S1
0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 0000000000000 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111 1111111111111
Figura 2.3: Retracto de deformaci´on.
Ejemplo 2.2 S1 es un retracto de deformaci´on de C− {0}.
En efecto, sea r :C− {0} → S1 dada porr(z) = z
kzk, para cada z ∈C− {0}. Se
tiene quer◦i(z) =r(z) = kzzk =z= 1S1(z).Entonces r◦i= 1S1.
Por otro lado, seaH :C− {0} ×I →C− {0}definida porH(z, t) = (1−t)z+tkzzk. Notemos que
H(z,0) =z= 1C−{0}(z) y H(z,1) = z
kzk =i◦r(z).
Entonces H : i◦r ' 1C−{0}, de aqu´ı que S1 es un retracto de deformaci´on de
C− {0}. Vea la Figura 2.3.
Teorema 2.6 Si A es un retracto de deformaci´on de X, entonces A yX son del mismo tipo de homotop´ıa.
Demostraci´on. Dado queAes un retracto de deformaci´on de X, entonces existe una funci´on continua r : X → A tal que r ◦i = 1A e i◦r ' 1X, donde i es la
inclusi´on deAen X. Notemos quer◦i= 1A implicar◦i'1A pues basta definir H :r◦i'1A como H(x, t) =r◦i(x), de aqu´ı queA y X son del mismo tipo de
2.2.
El funtor
π
0En la introducci´on de este cap´ıtulo se mencionan los invariantes πn para n≥ 1. En esta secci´on, se define de manera natural el primer invariante topol´ogico π0,
que asocia a un espacio un conjunto. Cabe mencionar que este conjunto no es un grupo, como ocurre paran≥1. Tambi´en es importante saber que el invariante π0 cuenta los “pedazos” ajenos en que se descompone el espacio.
SeaHom(F r(I),−) :htop→ Sets el funtor definido por:
Hom(F r(I), X) = [F r(I), X] ={[σ]|σ :F r(I)→X continua}, donde [σ] es la cla-se de homotop´ıa deσ, como en el Ejemplo 1.4 donde el espacio fijo es la frontera, F r(I) del intervalo I = [0,1].
N´otese que existe una biyecci´on entre [F r(I), X] y las c.p.t. X que es dada por ϕX[σ] = [σ(0)]. Esta relaci´on, en efecto, es una funci´on. Supongaδ∈[σ], entonces
existe una homotop´ıa H : δ ' σ. Defina α(t) = H(0, t) y β(t) = H(1, t). Luego [σ(0)] = [δ(0)] = [σ(1)] = [δ(1)] son la misma c.p.t. Por tanto, la funci´on est´a bien definida. Ahora; si [x0] es una c.p.t. y σ : I → X es una trayectoria tal que
σ(0) =x0 tomando la restricci´onσ|F r(I), tenemos queϕX([σ|F r(I)]) = [σ(0)]. Por
tanto, ϕX es sobre. Adem´as, si [δ(0)] = [σ(0)], entonces existen trayectorias δ yσ
en X tal queδ(0) =σ(0). TomandoH:δ|F r(I)'σ|F r(I), definida por
H(s, t) =
½
δ((1−2t)s) si (s, t)∈F r(I)×[0,1/2] σ((2t−1)s) si (s, t)∈F r(I)×[1/2,1].
Obtenemos [δ|F r(I)] = [σ|F r(I)]. As´ı,ϕX es inyectiva.
M´as a´un, ϕ:Hom(F r(I), )→c.p.t.(−) definida por la familia de funciones ϕX
es una transformaci´on natural, pues ϕX es biyectiva para cada X y el siguiente diagrama conmuta, en donde el morfismof :X→Y enhtopinduce la correspon-dientef#:
Hom(F r(I), X)ϕX //
f]
²
²
c.p.t(X)
f ]
²
²
Hom(F r(I), Y)ϕY //c.t.p(Y).
Por otro lado, nos interesa c´omo se parte X, as´ı definimos π0 por π0(X) = ϕX(Hom(F r(I), X)) =c.p.t.(X).
π0(X) →π0(Y) como la funci´on que toma una componente por trayectoriasC de
X y la manda a la componente por trayectoria deY que contiene a f(C).
Teorema 2.7 π0 :Top1→Setses un funtor. M´as a´un, si X y Y son espacios y
f, g:X→Y son funciones continuas con f 'g, entonces π0(f) =π0(g).
Demostraci´on. El Ejemplo 1.3 sustenta que π0 es un funtor. Sean F : f ' g,
y x ∈ [x] = Xλ, donde Xλ es alguna c.p.t. de X. Sea h(t) = F(x0, t) para cada t∈I. Es claro que h:I →Y es una trayectoria en Y. M´as a´un,h(0) =F(x,0) = f(x) y h(1) =F(x,1) =g(x), de aqu´ı quef(x)∼g(x). As´ı,
π0(f)([x]) = [f(x)] = [g(x)] =π0(g)([x]).
Por tanto π0(f) =π0(g). ¤
Corolario 2.2 SeanXyY espacios. SiXyY tienen el mismo tipo de homotop´ıa, entonces tienen el mismo n´umero de componentes por trayectorias.
Demostraci´on. Dado que X y Y tienen el mismo tipo de homotop´ıa, entonces existen funciones continuasf :X→Y,g:Y →Xtales quef◦g'1Y yg◦f '1X. Observemos, de las propiedades de funtor deπ0 que
(π0(f)◦π0(g))(Y) = π0(f◦g)(Y) =π0(1Y) = 1π0(Y) y,
(π0(g)◦π0(f))(X) = π0(g◦f)(X) =π0(1X) = 1π0(X).
Luego, existe una biyecci´on entre π0(X) y π0(Y). Por lo tanto, tienen el mismo
n´umero de componentes por trayectorias. ¤
2.3.
El Grupo Fundamental
En esta secci´on introducimos el invariante topol´ogico π1, el cual asigna a cada
f∗g:I →X por
(f ∗g)(t) =
½
f(2t) si 0≤t≤ 12
g(2t−1) si 1
2 ≤t≤1.
Por el Lema 1.1 tenemos quef∗ges continua, puesf∗g(12) =f(1) =g(0). Luego, f ∗g es una trayectoria en X. Si X es contra´ıble, entonces todas las funciones continuas deIenXson homot´opicas. Entonces, existe s´olo una clase de homotop´ıa (la clase de la funci´on constante). As´ı, el grupo asociado es el grupo trivial el cual proporciona muy poca informaci´on, entonces se modifica la definici´on de homotop´ıa de la siguiente manera.
Definici´on 2.5 Sean X un espacio, A⊂X y f0, f1 :X→Y funciones continuas con f0|A=f1|A. Se escribe
f0 'f1 rel A,
si existe una homotop´ıaF :f0'f1tal queF(a, t) =f0(a) =f1(a)para todoa∈A y todo t ∈ I. A esta homotop´ıa se le llama homotop´ıa relativa, o abreviando decimos homotop´ıa rel A.
La expresi´on F(a, t) =f0(a) = f1(a) para toda a∈ A y toda t∈ I, se sustituye porF(A, t) =f0(A) =f1(A).
Notemos que la homotop´ıa usual puede verse como una homotop´ıa rel∅. De mane-ra, similar que en el caso de la homotop´ıa se tiene, paraA⊂X, que la homotop´ıa rel A es una relaci´on de equivalencia sobre el conjunto de funciones continuas de X en Y. La demostraci´on de este hecho es an´aloga a la del Teorema 2.1, vea [2], p´ag. 380.
Definici´on 2.6 Sea Fr(I)={0,1} la frontera de I enR. La clase de equivalencia de una trayectoriaf :I →X rel Fr(I) es llamada la clase de trayectoria de f
y se denota por[f].
Teorema 2.8 Sean f0, f1, g0, g1 :I →X trayectorias en un espacioX con
f0 'f1 relF r(I) y g0'g1 rel F r(I).
Demostraci´on. Supongamos que F : f0 ' f1 rel F r(I) y que G : g0 ' g1 rel
F r(I). Definimos K :I×I →X de la siguiente manera:
K(s, t) =
½
F(2s, t) 0≤s≤ 12
G(2s−1, t) 1
2 ≤s≤1, para cadat∈I.
Observe que, como
K(1 2, t) =
½
F(1, t) =f0(1) =f1(1)
G(0, t) =g0(0) =g1(0)
yf1(1) =g1(0), entonces por el Lema 1.1K es continua. M´as a´un,
K(s,0) =
½
F(2s,0) =f0(2s) 0≤s≤ 12
G(2s−1,0) =g0(2s−1) 12 ≤s≤1
lo que indica queK(s,0) =f0∗g0. An´alogamenteK(s,1) =f1∗g1. Resta verificar que K(a, t) = f0 ∗g0(a) = f1 ∗g1(a), para todo a ∈ F r(I) y t ∈ I. Para esto
observemos que
K(0, t) = F(0, t) =f0(0) =f0∗g0(0) =f1(0) =f1∗g1(0) y, K(1, t) = G(1, t) =g0(1) =f0∗g0(1) =g1(1) =f1∗g1(1).
Por tanto K:f0∗g0'f1∗g1 relF r(I). ¤
Definici´on 2.7 Sea X un espacio, si f : I → X es una trayectoria de x0 a x1, llamamos ax0 origen de f y lo denotamos porx0=α(f), y ax1 elfinal de f y lo denotamos por x1 =ω(f). Una trayectoria f es cerradaen x0 siα(f) =ω(f). A una trayectoria cerrada f en x0 tambi´en la conocemos como lazo basado en
x0.
Observemos que si f ' g rel F r(I), entonces α(f) = α(g) y ω(f) = ω(g). As´ı, podemos hablar del inicio y final de una clase de trayectoria [f] y lo denotamos porα[f] yω[f], respectivamente.
i) Cada clase de trayectoria de[f] tiene un origen α[f] =p y un final ω[f] =q, con p, q∈X. Adem´as,
[ip][f] = [f] = [f][iq].
ii) La asociatividad se cumple siempre y cuando sea posible.
iii) Si p=α[f]y q =ω[f], entonces
[f][f−1] = [i
p] y[f−1][f] = [iq]. Demostraci´on.
i) Sean p, q ∈ X. S´olo mostramos que ip ∗f ' f rel F r(I). (La otra parte es
similar.) Nuestro objetivo es encontrar una funci´on continua H :I ×I →X, tal queH :ip∗f 'f rel F r(I).
( ,0)
p1 2 __
(0,1)
(0,0)
(1,0)
t
(1, )
t
f
s
i
f
Figura 2.4:
Observemos en la Figura 2.4, la ecuaci´on de la recta que une los puntos (0,1) y (12,0) es 2s= 1−t. Por otro lado, seat fijo, definimos la ecuaci´on de la recta que une los puntos (1−t
2 ,0) y (1,1), con pendientem= 1+2t porθt(s) = 1+2t(s−1)+1 = s−(1−t)/2
DefinimosH :I×I →X como
H(s, t) =
½
p si 2s≤1−t f(θt(s)) si 2s≥1−t;
Notemos queH coincide conip en la parte no sombreada de la Figura 2.4 y conf
la parte sombreada de la Figura 2.4. Adem´as, sis= 1−t
2 , el valor que toma H es
p, por el Lema 1.1H es continua.
Tenemos H(s,0) = p=ip para 0 ≤s≤ 12 y H(s,0) =f(2s−1) para 12 ≤ s≤1
lo que indica que H(s,0) = (ip ∗f)(s) y H(s,1) = f(s) para 0 ≤ s ≤ 1. M´as a´un, H(0, t) = p = ip∗f(0) = f(0) y H(1, t) = q = ip∗f(1) = f(1). Por tanto
H:ip∗f 'f rel F r(I), de aqu´ı que [ip][f] = [ip∗f] = [f].
ii) Para la demostraci´on de la asociatividad seguiremos un esquema similar a la demostraci´on anterior. Ahora consid´erese el siguiente diagrama.
¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ ¤¤ 1 4 1 2 1 2 3 4
f g h
6
-t
s
f g h
t
Para unt fijo definimos tres funciones continuas θ1
t, θ2t, θt3, donde
θt1: [0,t+ 1
4 ]→[0,1], θ
2
t : [
t+ 1 4 ,
t+ 2
4 ]→[0,1] y θ
3
t : [
t+ 2
4 ,1]→[0,1]
definidas por θ1
t(s) = t4+1s ,θ2t(s) = 4s−t−1 y θ3t(s) = 4s2−−t−2t , respectivamente.
DefinimosH :I×I →X como:
H(s, t) =
f(t4+1s ) 4s−1≤t
g(4s−t−1) 4s−2≤t≤4s−1 h(4s−t−2
2−t ) t≤4s−2.