2
VECTORES EN EL ESPACIO
Estudio del concepto de vector por medio del uso de un artefacto automatizado
Actividad Tecnológica Escolar para estudiantes de ciclo V
Autores:
RODRIGO GUERRERO
NANCY NOGUERA
JOHN RODRIGUEZ
UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS
ESPECIALIZACIÓN EN EDUCACIÓN EN TECNOLOGÍA
PROPUESTA TRABAJO DE GRADO
BOGOTÁ D.C.
3
1.
PRESENTACIÓN
M
aterial didáctico desarrollado como recurso para apoyar el aprendizaje del4
5
6
¿Qué queremos lograr con esta actividad?
Se tiene como objetivo la utilización de un mecanismo robótico para desarrollar una actividad tecnológica estudiantil integradora desde las asignaturas de Matemáticas, Tecnología y Física, para la enseñanza del concepto de vector con el cual se genere el desarrollo de habilidades basándonos en las competencias, los estándares de competencias y las operaciones mentales que hacen parte de cada asignatura.
A continuación se realizará una aclaración de cada una de éstas:
Competencias Asignatura
Matemática Física Tecnología
Solución
De
problemas
Está relacionado con la capacidad para identificar aspectos relevantes en una situación para plantear o resolver problemas no rutinarios; es decir, problemas en los cuales es necesario inventarse una nueva forma de enfrentarse a ellos.
Comprender
Capacidad para reconocer y diferenciar fenómenos, representaciones y preguntas pertinentes sobre estos fenómenos.
Analizo y valoro críticamente los componentes y evolución de los sistemas tecnológicos
7
Estándares básicos de competencias a trabajar
F
ísicaAcciones concretas del pensamiento:
Utilizo las matemáticas para modelar, analizar y presentar datos y
modelos en forma de ecuaciones, funciones y conversiones.
Conocimiento científico básico: relaciones Físicas
Modelo matemáticamente el movimiento de objetos cotidianos a partir
de las fuerzas que actúan sobre ellos. (Ministerio de Educación Nacional. 2006 p.141)
M
atemáticasPensamiento espacial y Sistemas Geométricos.
Identifico características de localización de objetos geométricos en
sistemas de representación cartesiana y otros (polares, cilíndricos y esféricos) y en particular de las curvas y figuras cónicas. (Ministerio de educación Nacional 2006 p.43)
O
rientación Curricular Competencia en Tecnología Analizo y valoro críticamente los componentes y evolución de los
8
Operaciones mentales
OPERACIÓN DEFINICIÓN
IDENTIFICAR Es reconocer las características esenciales y transitorias
que definen los objetos.
CODIFICAR
Sustitución de objetos por símbolos convencionales, para facilitar la manipulación y ahorrar tiempo y esfuerzo en la elaboración de la información (códigos numéricos).
RAZONAMIENTO INFERENCIA
Es la actividad mental que nos permite elaborar nueva información a partir de la información dada.
Información tomada de: http://edocenteprimaria.blogspot.com.co/2013/03/procesos-cognitivos-para-la-reflexion.html
Indicador de la ATE
9
2.
DESARROLLO
¿De qué trata esta actividad?
Consta de los siguientes tres momentos:
Primer Momento (Análisis
Tecnológico):
En esta fase se organizarán los estudiantes del curso en grupos de cuatro personas para hacer un análisis detallado del mecanismo robótico sin que éste se encuentre energizado, para poder identificar los
diferentes componentes del
artefacto y su posible funcionalidad.
M
ateriales por grupo Un computador con acceso a Internet.
Un teléfono celular con cámara
Hojas blancas
Un cuaderno de notas
Esfero
10
P
lanificacióna) Cada grupo de trabajo deberá tener en sus integrantes una persona hábil en
el dibujo, una persona que se le facilite la exposición de los resultados, y dos personas que sean hábiles en la manipulación de artefactos tecnológicos.
b) Cada grupo elegirá a uno de los dos estudiantes que tienen la habilidad en
la manipulación de aparatos tecnológicos, para que en dos minutos con ayuda de uno de los celulares pueda tomar fotos del artefacto (figura 1) desde diferentes vistas.
c) Cada grupo tendrá que desarrollar los siguientes puntos:
1. Realizará una lista de los diferentes elementos que conforman el
mecanismo robótico, verificando y analizando las diferentes fotografías tomadas
2. Con apoyo de internet realizará una búsqueda de las diferentes
funciones de cada uno de los elementos y sus evoluciones según la historia (sistemas de transmisión de movimiento, poleas, engranajes, sistemas de control)
3. Realizará un documento digital haciendo uso de google drive, donde
evidencie el desarrollo histórico de los diferentes elementos. Según con la información del funcionamiento de cada elemento que conforma el mecanismo robótico, plantear dos posibles aplicaciones de dicho mecanismo al finalizar el documento.
4. Se realizará la socialización de las diferentes hipótesis de cada uno de
los grupos junto con la votación de la aplicación más pertinente.
5. Se finalizará con la demostración del mecanismo robótico energizado y
11
Segundo Momento (artefacto como herramienta didáctica):
En esta fase se utilizará el
mecanismo robótico como
herramienta didáctica para la
explicación y apropiación del concepto de vector en los estudiantes de décimo grado.
En éste momento el docente manipula exclusivamente el dispositivo donde abordará los siguientes temas y dará la explicación de los componentes en R1, R2, y R3 y características de los vectores y las diferentes operaciones que se pueden realizar con los vectores tanto gráficos como analíticos. Se iniciará con lo más básico, esto es la representación gráfica del vector:
E
lementos que conforman un vector: Punto de aplicación - origen
Se representa con un punto e indica el inicio del vector o el lugar de aplicación según corresponda
Línea de acción - cuerpo
12
Final del vector - Cabeza
Se representa con una cabeza de flecha que indica la finalización del vector.
Al reunir estos tres elementos tendremos la representación gráfica de un vector (dando como resultado el dibujo de una flecha).
C
aracterísticas del vector: Magnitud
Hace referencia a la intensidad del vector, es decir, al valor numérico de dicho vector en términos técnico de la parte escalar (20 m, 50 N, 100 km/h)
Dirección
Hace referencia a la orientación del vector (x, y, z o el ángulo (Ɵ) con
relación a un eje determinado).
Sentido
Es la característica que dice si el vector es positivo o negativo (+, - )
En la figura se pueden evidenciar las características de los diferentes vectores que podemos encontrar (los recuadros de
colores representan las tres
13 Este otro esquema
muestra un ejemplo de vectores fuera de los
ejes, con sus
respectivas características.
O
peraciones vectoriales:Como observamos en la figura anterior, hay recuadros vacíos representando información faltante. Para poder obtener dichos valores se deben realizar las siguientes operaciones analíticas.
Suma
Se puede realizar de dos maneras una gráfica y la otra analítica empezaremos por la más sencilla que es la gráfica:
Suma gráfica A + B:
Las letras en negrilla
representan dos vectores
diferentes. Para sumar los dos vectores tomamos el vector B y colocamos su cola o el punto de aplicación sobre la cabeza del vector A y
14 Suma analítica:
Se resuelve teniendo en cuenta las magnitudes de los vectores y las direcciones, para sumar los términos que están en las mismas direcciones es decir x con x y lo de y con y. Veamos el ejemplo:
El vector
A solo
está en x, el vector B está en y, pero el vector C está fuera
de los ejes por esto tiene dos partes la de x y la de y, al sumar se organiza con relación a las direcciones como lo vemos en la parte izquierda de la figura.
E
l mecanismo robótico se utilizará en esta15
Resta
Se realiza el mismo proceso descrito en la suma, lo que cambia es que al menos uno de los vectores es negativo y se procede a colocar cabeza - cola los vectores involucrados en la operación teniendo presente cuál de los vectores tiene el signo menos A – B
Si tenemos más de dos vectores debemos tener presente los signos de cada uno como se presenta en este ejemplo, A – B + C el único que cambia de sentido es el vector B
16
Suma de vectores en R3
R
elación matemática Teorema de Pitágoras
Señala que siempre podemos encontrar una igualdad en los triángulos rectángulos si relacionamos sus lados de la siguiente manera: si elevamos la hipotenusa al cuadrado y lo igualamos a la suma de los cuadrados de sus catetos.
17
Razones Trigonométricas
Se pueden definen como la razón (división) entre dos de los lados de un triángulo rectángulo con relación a sus ángulos.
Se Utilizaran estas
razones para encontrar los componentes de un vector
Imagen tomada de: https://matesnoaburridas.wordpress.com/2015/01/26/trigonometria-medida-de-angulos-y-razones-trigonometricas/
Componentes trigonométricos de un vector
Coordenadas Polares
18
Las dos representaciones anteriores están muy relacionadas. De las definiciones de seno y coseno se tiene:
x = r cos Ɵ
y = r sin Ɵ
E
n el espacio tridimensional, la designacióncartesiana (x, y, z) es exactamente simétrica, pero algunas veces es conveniente seguir el sistema de coordenadas polares y designar la distancia y la dirección por separado.
r2 = x2 + y2 + z2
Tercer Momento
(manipulación del
artefacto):
En esta fase los estudiantes tendrán
la posibilidad de
manipular el
mecanismo robótico
para realizar la
19
L
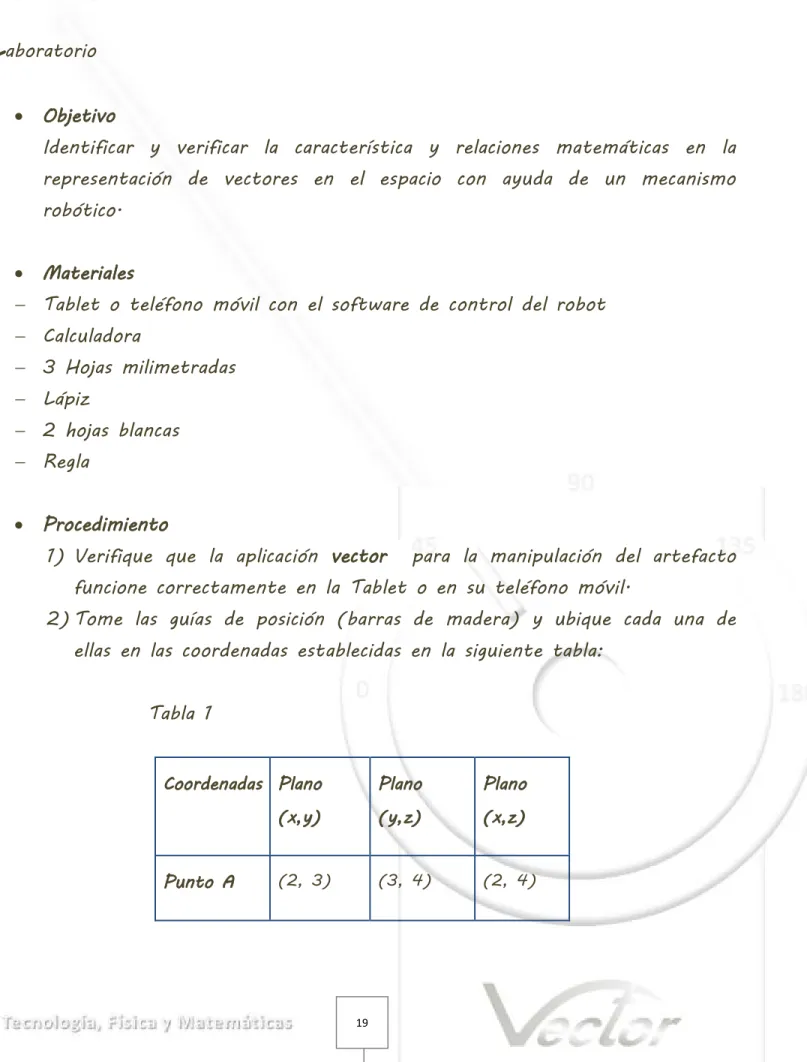
aboratorio Objetivo
Identificar y verificar la característica y relaciones matemáticas en la representación de vectores en el espacio con ayuda de un mecanismo robótico.
Materiales
Tablet o teléfono móvil con el software de control del robot
Calculadora
3 Hojas milimetradas
Lápiz
2 hojas blancas
Regla
Procedimiento
1) Verifique que la aplicación vector para la manipulación del artefacto
funcione correctamente en la Tablet o en su teléfono móvil.
2)Tome las guías de posición (barras de madera) y ubique cada una de
ellas en las coordenadas establecidas en la siguiente tabla:
Tabla 1
Coordenadas Plano (x,y)
Plano (y,z)
Plano (x,z)
20
Punto B (4, 4) (4, 5) (4, 5)
Punto C (-2, 3) (3, 4) (-2, 4)
Punto D (-4, 4) (4, 5) (-4, 5)
Punto E (3, 6) (6, 6) (3, 6)
3)Al ubicar las guías de posición en las coordenadas para el punto A,
realice los movimientos necesarios en el mecanismo para que el deslizador se dirija al punto de intersección de las tres barras.
4)Con ayuda del transportador encuentre el ángulo del vector resultante
con relación al plano xy y consígnelo en la tabla 2.
5)Repita los puntos del 1 al 4 cuatro veces más utilizando las
coordenadas para los puntos B, C, D, y E.
6)Utilizando las hojas milimetradas, realice el gráfico de los vectores, que
se pueden proyectar en los tres planos xy, yz ,xz y encuentre el valor del vector resultante y su dirección con ayuda del trasportador y consigne los datos en la tabla 2.
7)Con las componentes de la tabla 2, encuentre matemáticamente la
21 Tabla 2
vector Componente x Componente y Componente z Magnitud Angulo
R1
R2
R3
R4
Tabla 3
Plano R1 R2 R3 R4
xy
xz
yz
Tabla 4
Vector Magnitud Angulo
R1
R2
R3
22 Tabla 5
vector Componente x Componente
y
Componente
z Magnitud
Angulo
A
B
C
D
E
Tabla 6
VECTOR ANGULO √ √ (
√ ) √√
A
B
C
D
23
Conclusiones
Situación Problema
24
Realice la evaluación de la actividad en el siguiente formato
DEBILIDADES FORTALEZAS