ESCUELA SUPERI OR DE I NGENI ERÍ A MECÁNI CA Y ELÉCTRI CA DEPARTAMENTO DE I NGENI ERÍ A ELÉCTRI CA
UNI DAD PROFESI ONAL ADOLFO LÓPEZ MATEOS
ANÁLISIS Y SIMULACIÓN DEL MODELO DEL
COMPENSADOR ESTÁTICO DE VARs
ANTE COLAPSO DE TENSIÓN EN UN
SISTEMA DE PRUEBA
TESIS
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO ELECTRICISTA
PRESENTA
GUSTAVO REYES ESCOBEDO
ASESORES
M en C JOSÉ ANTONIO CASTILLO JIMÉNEZ
M en C JUAN ABUGABER FRANCIS
DEDICADA
A:
A Maggie.
Por estar ahí en los momentos más difíciles de la carrera, por motivarme cada vez que lo necesitaba, pero sobre todo por tu amor y compañía que han sido fundamentales para
lograr mis objetivos. Te amo.
A mi madre Alejandra.
Por darme la vida, quererme mucho, por tus consejos y sobre todo por creer en mí y porque siempre me apoyaste. Te quiero mamá.
A mi padre Gustavo.
Por los ejemplos de constancia que inculcaste en mí, porque siempre te preocupaste de que fuera alguien en la vida, por tu apoyo, por todo tu esfuerzo para darme educación.
Te quiero papá.
A mi hermana Jessica.
Agradezco infinitamente al M en C José Antonio Castillo Jiménez por su tiempo, paciencia, por creer en mi y por compartir sus conocimientos para el desarrollo de esta tesis.
Agradezco a mis sinodales por todos sus comentarios que hicieron para mejorar la calidad de esta tesis.
1
ÍNDICE
Índice de figuras Índice de tablas Nomenclatura
Resumen
Introducción
Capítulo 1. Definiciones generales
1.1Estructura del sistema de potencia
1.2Estudio de flujos de potencia
1.3Estabilidad de tensión
1.3.1 Características del sistema de transmisión
1.4Colapso de tensión
1.4.1 Escenario de colapso de tensión
1.5Sistemas flexibles de transmisión de corriente alterna
1.5.1 La electrónica de potencia
1.5.2 Controladores FACTS en serie
1.5.3 Controladores FACTS en derivación
Capítulo 2. El compensador estático de VARs
2.1Efectos de la compensación en derivación
2.2Principio de funcionamiento del CEV
2.2.1 Reactor controlado por tiristores (TCR)
2.2.2 Capacitor conmutado por tiristores (TSC)
2.2.3 Reactor controlado por tiristores-Capacitor conmutado por
tiristores (TCR-TSC)
Capítulo 3. Modelo del sistema de prueba y compensador estático de VARs
3.1Descripción del modelo de prueba
3.2Sistema de prueba en estado estable
3.2.1 Estudio de flujos
3.2.2 Simulación del sistema de prueba en condición normal
3.3Modelo del compensador estático de VARs
3.3.1 Susceptancia variable
3.4Sistema de prueba sometido a un colapso de tensión
3.4.1 Estudio de flujos después de la falla
2
3.4.2 Simulación del sistema bajo el colapso de tensión
3.4.3 Estudio de flujos de potencia después de la falla con el CEV
3.5Sistema de prueba complejo
3.5.1 Sistema de prueba complejo durante la falla.
3.5.2 Sistema de prueba complejo en falla y con CEVs instalados
Capítulo 4. Análisis de resultados
4.1 Análisis de los estudios de flujos de potencia 4.2 Análisis de las gráficas
Conclusiones
Referencias y bibliografía
Apéndice
39 43 47 50 53
55
55 56
58
59
I
ÍNDICE DE FIGURAS
Figura Figura 1.1 Figura 1.2 Figura 1.3 Figura 1.4 Figura 1.5 Figura 1.6 Figura 1.7 Figura 1.8 Figura 2.1 Figura 2.2 Figura 2.3 Figura 2.4 Figura 2.5 Figura 2.6 Figura 2.7 Figura 2.8
Elementos básicos de un sistema de potencia.
Sistema radial simple.
Gráfica de la tensión, corriente y potencia de la carga.
Características de la tensión y potencia del sistema.
Curvas de tensión contra potencia de distintos factores de potencia.
Niveles de tensión y potencia de los interruptores electrónicos de potencia.
Símbolo de un controlador serie.
Símbolo de un controlador en derivación.
Capacitancias de la línea y compensación en paralelo.
Curva QV de un CEV en estado estable.
Reactor controlado por tiristores.
Corrientes y tensiones para diferentes valores de α.
a) TCR trifásico b) TCR con reactor dividido.
Capacitor conmutado por tiristores.
Diagrama de un TSC trifásico.
Diagrama de un CEV formado por un TCR-TSC.
Página 6 10 12 13 14 16 17 18 21 22 23 24 26 26 27 28 Figura 3.1 Figura 3.2 Figura 3.3
Sistema de prueba de tres buses.
Gráficas del bus 1 del sistema de prueba en estado estable.
Gráficas del bus 2 del sistema de prueba en estado estable. 30
35
II Figura 3.4 Figura 3.5 Figura 3.6 Figura 3.7 Figura 3.8 Figura 3.9 Figura 3.10 Figura 3.11 Figura 3.12 Figura 3.13 Figura 3.14 Figura 3.15 Figura 3.16 Figura 3.17 Figura 3.18 Figura 4.1 Figura 4.2
Gráficas del bus 3 del sistema de prueba en estado estable.
Susceptancia variable en derivación.
Localización de la falla en el sistema de prueba.
Gráficas del bus 1 del sistema de prueba bajo el colapso de tensión.
Gráficas del bus 2 del sistema de prueba bajo el colapso de tensión.
Gráficas del bus 3 del sistema de prueba bajo el colapso de tensión.
Sistema de prueba con el CEV.
Gráficas del bus 1 del sistema de prueba bajo el colapso de tensión con el CEV instalado.
Gráficas del bus 2 del sistema de prueba bajo el colapso de tensión con el CEV instalado.
Gráficas del bus 3 del sistema de prueba bajo el colapso de tensión con el CEV instalado.
Ubicación geográfica del sistema de prueba complejo.
Diagrama equivalente del sistema de prueba complejo
SIN con la falla en la línea LGV-PBD.
Gráfica de la tensión de LGV
Gráfica de la tensión de PBD
Gráfica comparativa de las tensiones del sistema durante la falla.
Gráfica comparativa de las tensiones del sistema durante la falla con el CEV instalado.
III
ÍNDICE DE TABLAS
Tabla
Tabla 1.1
Tabla 3.1
Tabla 3.2
Tabla 3.3
Tabla 3.4
Tabla 3.5
Tabla 3.6
Tabla 3.7
Tabla 3.8
Tabla 4.1
Tipos de buses en el sistema de potencia.
Resistencias y reactancias del sistema de transmisión del sistema de prueba.
Tensiones y potencias del sistema de prueba.
Resultados del estudio de flujos previo a la falla.
Resultados del estudio de flujos después de la falla.
Resultados del estudio de flujos después de la falla con el CEV en operación.
Resultados del estudio de flujos de potencia en estado estable.
Resultados del estudio de flujos con la aplicación de la falla.
Resultados del estudio con los CEVs instalados.
Comparación de las tensiones de los buses en distintas condiciones
Página
9
30
30
34
39
43
49
51
53
1
RESUMEN
Los grandes sistemas de potencia están expuestos a un número muy grande de perturbaciones. Algunas de estas pueden considerarse muy severas e inclusive provocar que el SEP entre en un estado que pueda provocar la salida de secciones o dispositivos del servicio normal, provocando con esto la reducción en la calidad y seguridad del suministro de energía eléctrica en los grandes centros de consumo.
Un caso muy particular de estas perturbaciones es el colapso de tensión, el cual se define como una secuencia de eventos que junto con la inestabilidad llevan a un perfil bajo de la tensión en un punto importante del sistema de potencia. El análisis de esta reducción del nivel de tensión en buses específicos del SEP, está dado por el reporte obtenido de los flujos de potencia y propiamente de las mediciones que se tienen en campo. Dentro de este contexto se considera que una forma de ayudar al SEP a recuperar sus condiciones normales de operación es con la implementación de compensadores estáticos de VARs en buses que presentan, de acuerdo a los estudios de flujos de potencia un índice alto en presentar un perfil bajo en el nivel de tensión ante cualquier perturbación.
En este trabajo se presentan el análisis y simulaciones digitales hechas a un sistema de prueba que presenta una perturbación que refleja la condición de colapso tensión e identificar como el CEV ayuda a mantener la tensión en un valor aceptable. Para ello se realizan estudios de flujos de potencia para cada condición del sistema y observar la tensión en cada uno de los nodos.
2
INTRODUCCIÓN
Debido a que los sistemas eléctricos de potencia (SEPs) están expuestos a diversos disturbios tales como: cortos-circuitos, descargas atmosféricas, operación de interruptores, conexión y desconexión de cargas no planeadas, etc., es necesario establecer estrategias para reducir los efectos derivados de estos disturbios. Uno de estos efectos se manifiesta con el colapso del nivel de tensión en los buses del sistema de transmisión, lo que se considera como una inestabilidad de las tensiones, provocando la aparición de alarmas y posibles desconexiones de elementos que operan normalmente.
Bajo estas condiciones de operación el SEP, necesita implementar estrategias adicionales para recuperar la estabilidad, por lo que es necesario realizar diversos estudios y particularmente, sobre la estabilidad de tensión bajo diferentes condiciones de operación incluyendo el compensador estático de VARs.
OBJETIVO GENERAL
Analizar la influencia del compensador estático de VARs durante el colapso de tensión en un sistema de prueba.
OBJETIVOS PARTICULARES
Estudiar la condición del colapso de tensión.
Analizar el modelo de un sistema de prueba.
Implementar y analizar el modelo del CEV en el sistema de prueba.
JUSTIFICACIÓN
La configuración de los sistemas eléctricos de potencia se modifican con la aparición de los Sistemas Flexibles de Transmisión de C.A. (FACTS, por sus siglas en lengua inglesa) adquieren nuevas características ya que a los FACTS proporcionan nuevas formas de transmitir y controlar el flujo de potencia eléctrica desde los grandes centros de generación hacia los grandes centros de consumo.
3
Un caso particular de los dispositivos FACTS es el compensador estático de VARs, este dispositivo FACTS de primera generación, permite respaldar la tensión del sistema ante perturbaciones donde se provoque un colapso de tensión a través de inyección de corriente reactiva proveniente de los bancos de capacitores del propio dispositivo.
En otras palabras, un CEV inyecta la potencia reactiva requerida para controlar las oscilaciones dinámicas de tensión por lo tanto mejora la estabilidad del sistema transmisión y distribución. Este dispositivo normalmente se instala en puntos adecuados para que la red incremente la capacidad de transferencia y reduce las pérdidas, mejorando la estabilidad de la tensión.
ESTADO DEL ARTE
El CEV, un dispositivo FACTS se desarrolló a principios de los años 70 para el control de la tensión en puntos de la red en los que hubiese hornos de arco de eléctrico.
Posteriormente se descubrió que ayudaban a la corrección del factor de potencia y actualmente se sabe que mejora la estabilidad de la tensión durante los colapsos, además de que aumentan la capacidad de las líneas de transmisión.
En el 2003 T.V. Trujillo, C.R. Fuerte-Esquivel y J.H. Tovar Hernández analizaron y desarrollaron un nuevo modelo del CEV, esto para su implementación en un programa de flujos de potencia. Dentro del modelo se considera una conexión delta del CEV. En el análisis se asume que el CEV es una susceptancia, la cual es ajustada con el fin de lograr una magnitud de tensión nodal específica. También modificaron un programa Newton-Raphson polifásico con el fin de implementar los modelos propuestos [15].
En el 2006 la Georgia Power Company desarrollo el diseño y la aplicación del CEV para el soporte de la tensión en el área de Dublin, Georgia. El CEV se alimenta a una tensión de 115 kV maneja una potencia de 87 MVAr. Se instaló el compensador con el fin de retrasar la construcción de una nueva línea de transmisión de 230 kV, lo cual generaría gastos [16].
En el 2008 Taufik y Bryan Paet construyeron un CEV a pequeña escala para pruebas y demostraciones de laboratorio. El prototipo demostró de manera efectiva la función del CEV en la corrección del factor de potencia utilizando tiristores de potencia en un circuito de fase controlada [17].
4
cada uno de los dispositivos FACTS incluyendo el CEV y finalmente se revisan las aplicaciones de los mismos [18].
FACTS Modelling and Simulation in Power Networks, del 2004 es el nombre de la publicación de E. Acha en donde se abarcan todo lo relacionado con el modelado de los dispositivos FACTS para su implementación en simuladores. Cabe mencionar que el autor dentro de su obra realiza aportaciones de códigos de programas para MATLAB [19].
P. Kundur en su obra Power System Stability and Control, del 1994 describe todas las consideraciones y fenómenos de la estabilidad de tensión de cada uno de los elementos del sistema de potencia, desde los generadores, abarcando las líneas de transmisión hasta las características de la carga. Dentro del texto existe un apartado para el colapso de tensión el cual el autor define como una condición del SEP en donde la tensión disminuye de manera importante por la combinación de eventos y condiciones [20].
5
CAPÍTULO I. DEFINICIONES GENERALES
La demanda de los sistemas de potencia crece día con día y estos están limitados a cierta capacidad, es por eso que se ven sometidos a diversos disturbios. Por razones económicas y ecológicas es casi imposible aumentar su capacidad ya que esto implicaría expansión de las centrales generadoras, aumento de los kilómetros de líneas de transmisión y/o construcción de subestaciones.
Gracias al desarrollo de la electrónica de potencia es posible implementar en los Sistemas Eléctricos de Potencia (SEPs) los Compensadores Estáticos de VARs (CEVs) debido a su construcción son dispositivos relativamente baratos además de que poseen diversas aplicaciones. Una de las ventajas a destacar sería la rapidez con la que operan en comparación a los elementos mecánicos.
Este capítulo presenta una introducción general a la estabilidad de tensión de los sistemas eléctricos de potencia, incluyendo los conceptos físicos, la clasificación, y las definiciones de los términos relacionados con la misma. También se presenta una introducción a los Sistemas Flexibles de Transmisión de C.A.
1.1 ESTRUCTURA DEL SISTEMA DE POTENCIA
Los sistemas de potencia varían en función del tamaño y de los componentes que los conforman. Sin embargo todos ellos tienen las mismas características básicas [20]:
Están compuestos de sistemas de C.A trifásicos operando a tensión constante. La generación y transmisión facilitan el uso de equipo trifásico. Las cargas trifásicas industriales son invariables; las cargas monofásicas residenciales y comerciales están distribuidas igualmente entre las fases con el fin de formar un sistema trifásico balanceado.
Uso de máquinas síncronas para la generación de electricidad.
La transmisión de potencia a grandes distancias para los consumidores, está se reparte en una amplia zona. Esto requiere un sistema de transmisión que comprende subsistemas operando a diferentes niveles de tensión.
La energía eléctrica se produce en las centrales generadoras y se transmite a los consumidores a través de redes complejas formadas por líneas de transmisión, transformadores e interruptores.
6
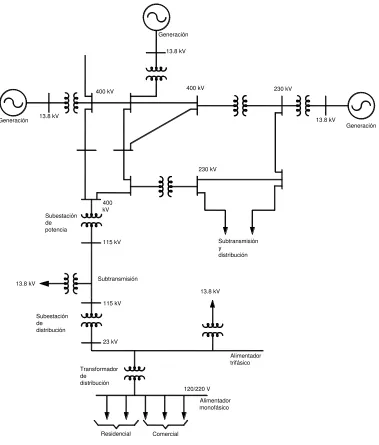
Figura 1.1 Elementos básicos de un sistema de potencia.
El sistema de transmisión se define y clasifica en los siguientes subsistemas [20]:
Sistema de Transmisión. El sistema de transmisión interconecta la mayor parte de las centrales generadoras y los principales centros de carga del sistema. Esto constituye la columna vertebral del SEP y opera a los niveles más altos de tensión (de 230 kV en adelante). Las tensiones del generador se encuentran en el intervalo de 11 a 35 kV. Estos niveles de tensión se incrementan para la transmisión, y la potencia se envía a las subestaciones de transmisión donde la tensión se reduce al nivel de subtransmisión (69 kV a 138 kV).
Sistema de Subtransmisión. El sistema de subtransmisión transfiere la potencia en pequeñas cantidades de las subestaciones de transmisión a las subestaciones de
13.8 kV
400 kV
13.8 kV
400 kV 230 kV
13.8 kV
115 kV 400 kV
13.8 kV
115 kV
23 kV
120/220 V
Residencial Comercial
13.8 kV
Subtransmisión y
distribución Subestación
de potencia Generación
Generación
Generación
Subtransmisión
Subestación de distribución
Transformador de distribución
Alimentador monofásico
7
distribución. Algunas compañías son alimentadas directamente del sistema de subtransmisión.
Sistema de Distribución. El sistema de distribución representa la etapa final en la transferencia de la energía a los clientes individuales. Los niveles de tensión se encuentran entre 4 kV y 34.5 kV. Las industrias pequeñas las suministran los alimentadores primarios mientras que los alimentadores secundarios se encargan de clientes comerciales y residenciales a 120/220 kV.
1.2 ESTUDIO DE FLUJOS DE POTENCIA
Los estudios de flujos de potencia son de gran importancia en el control, planeación y diseño de la expansión futura de los sistemas de potencia, así como también en la determinación de las condiciones de operación de los sistemas existentes. Donde principalmente se obtiene la magnitud y el ángulo de fase de la tensión en cada bus y las potencias real y reactiva que fluyen en cada línea [22].
Para resolver el problema de flujos de potencia, se utilizan diversos métodos numéricos como el método de Newton-Raphson y el método de Gauss-Seidel, en los cuales se pueden usar las admitancias propias y mutuas que componen la matriz de admitancias de
busYbus.
Las lí eas de tra s isió se represe ta por su e uivale te o ofásico o i al “π . Los valores numéricos para la impedancia serie Z y la admitancia total de carga de la línea Y son necesarios para cada línea, de forma que se puedan determinar todos los elementos de la matriz de admitancias de N x N. Un típico elemento Yij tiene la forma que se muestra en la ecuación (1.1)
cos sen
ij ij ij ij ij ij ij ij ij
Y Y Y j Y G B (1.1)
Para resolver el problema de flujos de potencia, se dan ciertas tensiones de bus y se deben conocer algunos de los valores de inyecciones de potencia. La tensión en un bus típico i del sistema está dada en coordenadas polares como se muestra en la ecuación (1.2)
cos sen
i i i i i i
V V V j (1.2)
Por otro lado la tensión en el bus j se escribe de manera similar cambiando el subíndice i por el j. La corriente total que se inyecta en la red a través del bus i en términos de los
8
1 1 2 2
1
N
i i i iN N in n
n
I Y V Y V Y V Y V
(1.3)Sean Pi y Qi las potencias activa y reactiva totales que entran a la red a través del bus i. En la ecuación (1.4) se presenta el complejo conjugado de la potencia que se inyecta al bus i.
1
N i i i in n
n
P jQ V Y V
(1.4)en la que se sustituyen las ecuaciones (1.1) y (1.2) para obtener
1
N
i i in i n in n i n
P jQ Y VV
(1.5)Al expandir la ecuación (1.5) e igualar las partes real y compleja, se obtiene que
1
cos N
i in i n in n i n
P Y VV
(1.6)
1
sen N
i in i n in n i n
Q Y VV
(1.7)Las ecuaciones anteriores constituyen la forma polar de las ecuaciones de flujo de potencia; ellas dan valores calculados para la potencia real Pi y la potencia reactiva Qi totales que entran a la red a través de un bus i. Sea Pgi la potencia inicial que se está generando en el bus i y Pdi la potencia inicial que demanda la carga en ese bus. Entonces, la expresión da la potencia inicial total que está siendo inyectada dentro de la red en el bus i. Se nombra al valor calculado de Pi como Pi,calc y se llega a la definición de error Δ Pi como el valor inicial Pi0 menos el valor calculado Pi,calc [22].
0 , ,
i i i calc gi di i calc
P P P P P P
(1.8)
Cada bus del sistema de potencia esta descrito por cuatro variables, la potencia activa, la potencia reactiva, la magnitud de la tensión así como su ángulo.
9
En el sentido más amplio se puede pensar que las magnitudes la tensión y los ángulos de fase son variables de estado y la potencia activa y reactiva se consideran variables controlables [19].
Los buses son clasificados de acuerdo a las dos variables especificadas:
Bus PQ o de carga: En este tipo de bus no existe ningún generador conectado, por lo tanto PG y QG son igual a cero. En este tipo de buses la potencia activa y reactiva están dadas por la carga, es decir, PL y QL son especificadas y la tensión así como el ángulo son calculados.
Bus PV o de generación: Un generador es conectado al bus, la tensión se mantiene un valor constante debido a que los generadores están equipados con un RAV y PG es un valor específico. La otras dos cantidades y QG son calculadas.
Bus slack o de compensación: Uno de los buses de generación es elegido para ser el bus compensador, donde la tensión y el ángulo son especificados. Solo hay un bus compensador en todo el sistema y su función es la de generar la suficiente potencia para compensar las pérdidas del sistema. El ángulo de fase del bus compensador proporcionan la referencia angular del sistema, el cual usualmente es igualado a cero.
La clasificación de los buses del sistema se puede observar de manera más clara en la Tabla 1.1.
Tabla 1.1Tipos de buses en el sistema de potencia
Tipo de Bus Variables
conocidas Incógnitas Ecuaciones
PQ o de
carga P, Q V, P, Q
PV o de
generación P, V Q, P
Slack o de
compensación V, P, Q Ninguna
Además de permitir tener el mismo número de ecuaciones y de incógnitas, la definición de tipos de buses ayuda a reducir el número de ecuaciones del sistema no lineal.
1.3 ESTABILIDAD DE TENSIÓN
10
esencialmente locales y sus consecuencias pueden, en algunas circunstancias, extenderse por todo el sistema eléctrico.
Antiguamente estos problemas se relacionaban con sistemas débiles y líneas de transmisión largas, pero actualmente los problemas de tensión son una fuente de preocupación en las redes altamente desarrolladas como resultado de cargas cada vez más grandes.
La estabilidad de tensión se puede definir como la habilidad del SEP para mantener valores de tensión aceptables en todos los buses del sistema bajo condiciones normales y después de haber sido sometido a una perturbación [20].
Un sistema entra en estado de inestabilidad de tensión cuando una perturbación incrementa la demanda de carga o cambia la condición del sistema que causa una disminución progresiva e incontrolable de la tensión.
El principal factor que causa la inestabilidad es la incapacidad del SEP para satisfacer la demanda de potencia reactiva. La raíz del problema usualmente es la caída de tensión que aparece cuando el flujo de potencia activa y de potencia reactiva circula a través de las reactancias inductivas, estas debido a las líneas de transmisión. Un criterio para considerar la estabilidad de tensión es que, en una condición de operación dada para cada bus en el sistema, la tensión del bus incrementa y la inyección de potencia reactiva disminuye en ese mismo bus.
Un sistema se encuentra con tensión inestable si, por lo menos la tensión V de un bus disminuye así como la inyección de potencia reactiva Q aumenta.
1.3.1 Características del sistema de transmisión en estabilidad de tensión
La inestabilidad de tensión puede ocurrir de diferentes maneras. En su forma simple puede ser ilustrada considerando una red de dos terminales como la de la Figura 1.2 Consiste de una fuente de tensión constante (Es) alimentando una carga (ZLD) a través de una impedancia serie (ZLN).
11
La ecuación para la corriente Ī en la Figura 1.2 es
S LN LD E I Z Z (1.9) Dónde:
I es la corriente que circula a través de la carga en amperes [A].
S
E es la tensión suministrada por la fuente en volts [V].
LN
Z es la impedancia del conductor en ohms [Ω].
LD
Z es la impedancia de la carga en ohms [Ω].
Cuando Ēs e Ī son fasores, y además
,
LN LN LD LD
Z Z Z Z (1.10)
La magnitud de la corriente está dada por
2 2
( cos cos ) ( sin sin )
S
LN LD LN LD
E I
Z Z Z Z
(1.11)
Esto puede ser expresado como
1 S LN E I Z F (1.12) Dónde 2
1 LD 2 LD cos( )
LN LN
Z Z
F
Z Z
(1.13)
El valor de la tensión en el lado receptor está dada por
R LD
V Z I (1.14)
1 LD R S LN Z V E Z F (1.15)
La potencia que absorbe la carga es
cos R R
P V I (1.16)
2 cos LN S R LN Z E P
F Z
12
Las gráficas de I ,VR y PR se muestran en la Figura 1.3 en función de ZLN ZLD , con
tan
10.0 y cos0.95. Para hacer que los resultados aplicables para cualquier valor de ZLN, los valores de I ,VR y PR están normalizados. [20].Como la demanda de la carga incrementa al disminuir ZLD, PR incrementa rápidamente y
[image:21.612.128.491.213.453.2]después disminuye lentamente antes de llegar al máximo. Existe un valor máximo de potencia activa que puede ser transmitido a través de una impedancia de una fuente de tensión constante.
Figura 1.3 Grafica de la tensión, corriente y potencia de la carga con respecto a la relación ZLN ZLD
La potencia máxima transmitida se logra cuando la caída de tensión en la línea es igual a
R
V , que es cuando ZLN ZLD 1. Como ZLDdisminuye gradualmente, I incrementa y VR
disminuye. Inicialmente, en valores grandes de ZLD, el incremento en I domina al
decremento en VR, por lo tanto PR aumenta rápidamente cuando ZLD disminuye. Como
LD
Z se aproxima a ZLN, el efecto de la disminución en I es ligeramente mayor que el
decremento en VR. Cuando ZLD es menor que ZLN, la disminución en VR domina el
incremento en I , y el efecto de la red disminuye en PR.
La condición de operación crítica para la máxima potencia representa el límite óptimo de operación. Para la demanda superior de carga, el control de la potencia variando la carga puede ser inestable; es decir, una disminución en la impedancia de la carga reduce la potencia. Si la tensión disminuye progresivamente y el sistema llegara a ser inestable, dependería de las características de la carga. Con una carga estática de impedancia
1.0
Oper
ac
ión Nor
ma
l
Va
lor Crític
o Oper
ac
ión Ano
rma
l
0.8
0.5
1 2 3 ZLN/ZLD
PR/PMAX I/ISC
13
constante, el sistema se estabiliza en los niveles de tensión y potencia menores que los valores deseados. Por el otro lado, con una carga de potencia constante, el sistema llega a ser inestable a través de un colapso de tensión en el bus de la carga. Si la carga es alimentada por transformadores con un cambiador de taps automático, el efecto del
cambiador tratará de elevar la tensión de la carga. Esto a su vez reduce VR aún más y lleva a una reducción progresiva de la tensión. Esta es una forma simple y pura de inestabilidad de tensión.
[image:22.612.167.453.252.493.2]Desde el punto de vista de estabilidad de tensión, la relación entre PR y VR es de interés. Esto se muestra en la Figura 1.4 para el sistema bajo consideración cuando el factor de potencia de la carga es igual a 0.95 en atraso.
Figura 1.4 Características de la tensión y potencia del sistema.
En la gráfica de la Figura 1.4, es posible observar cuando la potencia de la carga es igual a la potencia máxima de transferencia, la tensión en la carga es menor a la tensión del sistema, entrando en valores críticos.
La Figura 1.5 muestra las curvas de la relación de PR -VR para diferentes valores del factor de potencia de la carga. El lugar de los puntos de operación crítica se muestra por la línea punteada de la figura. Normalmente, sólo en los puntos de operación arriba de los puntos críticos representan condiciones de funcionamiento satisfactorio.
0.0 0.2 0.4 0.6 0.8 1.0 VR/ES
0.2 0.4 0.6 0.8 1.0 PR/PRMAX
14
Una repentina reducción en el factor de potencia puede causar que el sistema cambie de una condición de operación estable a una insatisfactoria, y posiblemente a una inestable,
[image:23.612.122.476.129.369.2]la condición de operación se representa por la parte de debajo de la curva PR -VR.
Figura 1.5 Curvas de tensión contra potencia de distintos factores de potencia.
La Figura 1.5 muestra como para un factor de potencia inductivo la relación V ER / S se encuentran aproximadamente en 0.5, es decir que la tensión de la carga es igual al 50% de la tensión generada por el sistema. Por otro lado, si el factor es capacitivo el punto crítico
se encuentra aproximadamente cuando V ER/ S es igual a 0.9.
1.4 COLAPSO DE TENSIÓN
El colapso de tensión es el proceso que junto con la inestabilidad de tensión llevan a un perfil bajo e inaceptable de tensión en una parte importante del sistema.
El colapso de tensión puede manifestarse de diferentes maneras. En este apartado se describe un escenario típico de colapso de tensión.
1.4.1 Escenario de colapso de tensión
15
condiciones del sistema, provoquen que la demanda adicional de potencia reactiva pueda llevar al colapso de tensión, causando una falla importante en todo o una parte del sistema.
Un escenario típico de colapso de tensión sería el siguiente [20]:
El sistema de potencia experimenta condiciones anormales de operación con grandes unidades de generación cerca de los centros de carga que están fuera de servicio. Como resultado, algunas líneas se sobrecargan y las reservas de potencia reactiva están al mínimo.
El evento siguiente es la pérdida de una línea muy cargada la cual puede causar carga adicional en las líneas adyacentes. Esto incrementaría las pérdidas de potencia reactiva en las líneas., de tal modo que causa una fuerte demanda de potencia reactiva en el sistema.
Después de perder la línea, existiría una reducción considerable de la tensión en los centros de carga debido a la demanda extra de potencia reactiva. Esto causaría una disminución en la carga, y la reducción resultante en el flujo de potencia a través de las líneas de alta tensión tendrían un efecto estabilizador.
Los RAV rápidamente restaurarían las terminales del generador aumentando la excitación. El flujo de potencia reactiva resultante a través de las inductancias de los transformadores del generador y las líneas, causarían un incremento en la caída de tensión de estos elementos.
En esta etapa, los generadores estarían dentro de sus capacidades de salida de P-Q, es decir, dentro de los límites de calentamiento de la armadura y de corriente de campo. Los controladores regularían la frecuencia reduciendo los MW de salida.
La reducción en el nivel de tensión en los centros de carga se reflejaría en el sistema de distribución. Los ULTC de los transformadores de la subestación restaurarían los valores de tensión de distribución a niveles normales en un tiempo de 2 a 4 minutos. Con el cambio de cada derivación el incremento resultante en la carga de las líneas de transmisión incrementaría las perdidas XI2y RI2, las cuales a su vez causarían una caída en los niveles de tensión.
16
puede limitar la salida de potencia reactiva para mantener la corriente de armadura dentro de los límites permitidos.
1.5 SISTEMAS FLEXIBLES DE TRANSMISIÓN DE CORRIENTE ALTERNA
Los sistemas flexibles de transmisión de corriente alterna mejor conocidos como FACTS, por sus siglas en inglés Flexible Alternating Current Transmission Systems son dispositivos que pueden ser definidos como equipos de ayuda a la transmisión en corriente alterna, basados en la electrónica de potencia y en otros controladores estáticos, cuyo objetivo es controlar continuamente algunos de los parámetros interrelacionados que gobiernan la operación de los SEPs, tales como impedancia serie, admitancia paralelo, corriente, tensión, ángulo de fase, así como producir la amortiguación de oscilaciones a frecuencias menores que la nominal.
El uso de estos equipos FACTS puede traer otras consecuencias beneficiosas, como un mejor aprovechamiento de las instalaciones existentes, una disminución de las pérdidas de potencia activa, mejoras en la estabilidad de la red y menores costos de producción de energía.
1.5.1 La electrónica de potencia
Los FACTS utilizan elementos electrónicos en su construcción, uno de ellos es el tiristor, el cual es un dispositivo que puede ser disparado con un pulso en la compuerta y permanece en estado activo hasta el siguiente cruce por cero de la corriente, es decir que solo es posible una conmutación por cada medio ciclo, lo cual es una desventaja para el tiristor ya que limita el control.
17
En la Figura 1.6 se puede observar que en cuanto aumenta la potencia de aplicación y la tensión del convertidor disminuye el control sobre el dispositivo, siendo el tiristor el elemento con la capacidad más alta.
1.5.2 Controladores FACTS en serie
En este tipo de sistemas, la principal función del controlador es inyectar una tensión en serie con la línea de transmisión donde está conectado, acción que realiza al variar su propia impedancia, misma que al ser multiplicada por la corriente que circula por ella, genera una tensión variable que están en serie con la línea de transmisión.
Mientras la tensión generada esté en cuadratura de fase con la corriente de línea, el controlador únicamente generará o absorberá potencia reactiva. Para cualquier otro ángulo, el controlador manejará potencia real en el punto de conexión. Por lo anterior, podemos decir que un sistema FACTS conectado en serie actúa como una fuente de tensión, impactando así la caída de tensión que se tiene en la línea de transmisión, razón por la cual este sistema es más adecuado para controlar directamente la corriente y el flujo de potencia de la línea de transmisión.
Una posible desventaja de un controlador serie, comparado con un controlador en derivación, es que para cada línea de transmisión podría requerirse un controlador serie, sobre todo cuando se requiere que ninguna de las líneas salga de operación por contingencia, sin embargo, su capacidad generalmente es mucho menor que la de un controlador en derivación, razón por la cual es una solución más económica. En la Figura 1.7 se muestra la simbología de un controlador conectado en serie.
Figura 1.7 Símbolo de un controlador serie
A continuación se listan algunos de los principales sistemas FACTS con conexión en serie:
Compensador Serie Síncrono Estático (SSSC) Controlador de Flujo de Potencia Interlinea (IPFC) Capacitor Serie Controlado por Tiristores (TCSC)
Capacitor Serie Conectado/Desconectado por Tiristores (TSSC)
e
18
Reactor Serie Controlado por Tiristores (TCSR)
Reactor Serie Conectado/Desconectado por Tiristores (TSSR)
Las principales aplicaciones de los controladores serie son:
Reducción de las fluctuaciones de tensión dentro de los límites definidos durante el cambio de las transmisiones de potencia.
Mejora del sistema de amortiguamiento.
Límite de corrientes de corto circuito en las redes o en las subestaciones.
1.5.3 Controladores FACTS en derivación
En este tipo de sistemas, la principal función del controlador es inyectar corriente al sistema donde está conectado, acción que realiza a partir de variar su propia impedancia, que al estar conectada en derivación provoca un flujo de corriente variable, lo que se traduce en una inyección de corriente en el punto de conexión. Si la corriente inyectada está en cuadratura de fase con la tensión, el controlador sólo generará o absorberá potencia reactiva, mientras que para cualquier otro ángulo, el controlador manejará también potencia real en el punto de conexión.
Por lo anterior, se puede afirmar que un sistema controlador en derivación actúa como una fuente de corriente, retirando o inyectando corriente (adelantada o atrasada) hacia la línea, razón por la cual este tipo de sistema constituye un buen recurso para controlar la tensión en el punto donde es conectado. Dado que la corriente inyectada puede ser activa o reactiva, el controlador en derivación es muy efectivo para el control de la tensión y amortiguar oscilaciones de tensión en el bus de conexión. En la Figura 1.8 se muestra la simbología de un controlador conectado en derivación.
Figura 1.8 Símbolo de un controlador en derivación
i
19
Una posible ventaja de un controlador en derivación, comparado con un controlador serie, es que el primero sirve para el bus donde es conectado, independientemente de la cantidad de líneas de transmisión que acometen al mismo, sin embargo, su capacidad es generalmente mucho mayor que la de un controlador conectado en serie, razón por la cual esta solución es más costosa, además de que los controladores en derivación no brinda control sobre el flujo de potencia en las líneas de transmisión.
Algunos de los principales sistemas FACTS con conexión en derivación son:
Compensador Síncrono Estático (STATCOM) Generador Síncrono Estático (SSG)
Compensador Estático de VARs (CEV)
En general los dispositivos FACTS son elementos que pueden ayudar al SEP ante diversas perturbaciones. En el presente trabajo se considera la presencia de un CEV. Este equipo opera, como su nombre lo dice, como un compensador de potencia reactiva. Las principales aplicaciones en líneas transmisión, sistemas de distribución e instalaciones industriales son:
Reducción de flujos de potencia reactiva no deseados y por lo tanto disminución de pérdidas en la red.
Compensación de los consumidores y mejora de la calidad de la energía especialmente con fluctuaciones enormes de demanda como máquinas industriales, plantas de fundición de hierro, ferrocarriles o sistemas de trenes.
Compensación de convertidores a base de tiristores por ejemplo en líneas de HVDC (High Voltage Direct Current).
20
CAPÍTULO II. EL COMPENSADOR ESTÁTICO DE VARs
En función de los estudios de flujos de potencia es correcto identificar que los capacitores generan potencia reactiva y los reactores la absorben, cuando éstos son conectados a una fuente de corriente alterna.
En un inicio, los sistemas de potencia utilizaban los capacitores y reactores para controlar la generación y absorción de potencia reactiva en el sistema, los cuales se desconectaban por medios mecánicos.
Estos equipos han ido modificando su operación al incluir la electrónica de potencia, específicamente los tiristores de alta potencia, que en conjunto con capacitores y reactores en diferentes configuraciones, generan una impedancia variable.
La definición dada por la IEEE definen a un CEV como un generador estático de VARs cuya salida es variada para mantener o controlar algún parámetro específico (como tensión o frecuencia) del sistema eléctrico de potencia. [19]
2.1 EFECTOS DE LA COMPENSACIÓN EN DERIVACIÓN
La compensación consiste en la inyección de potencia reactiva para mejorar la operación del sistema de potencia, más específicamente, mantener las tensiones cerca de los valores nominales, reducir las pérdidas de la red, y contribuir a la estabilidad.
El propósito de la compensación en paralelo es cambiar las características eléctricas de la línea de transmisión para hacerla más compatible con la demanda predomínate de la carga. Por lo tanto los reactores en paralelo son aplicados para minimizar las sobretensiones bajo condiciones de poca demanda, y los capacitores en paralelo son empleados para mantener niveles de tensión bajo condiciones de exceso de carga. [21]
El último objetivo de aplicar la compensación reactiva en paralelo en un sistema de transmisión es para incrementar la potencia transferible, esto puede ser requerido para mejorar la estabilidad el sistema. La compensación reactiva se emplea en el punto medio de la línea de transmisión para la regulación de la tensión y en el punto final de la misma para prevenir la inestabilidad de tensión, también se utiliza en el control dinámico de la tensión para incrementar la estabilidad transitoria.
21
Figura 2.1 Capacitancias de la línea y compensación en paralelo.
El equivalente de Thévenin visto desde la carga (es decir a la izquierda de la línea punteada de la figura 2.1 tiene la siguiente FEM y reactancia.
1
1 ( )
th
c l
E E
B B X
(2.1)
1
1 ( )
th
c l
X X
B B X
(2.2)
Las ecuaciones de máxima transferencia de potencia y tensión máxima al final de la línea están dadas respectivamente por:
2
max 1 sen 2cos E
P X (2.3) max
2 1 sen
P E
V
(2.4)
Remplazando E por Eth y X por Xth en las ecuaciones (2.3) y (2.4) se tiene la máxima transferencia de potencia (bajo el factor de potencia ϕ):
2 2
max 1 sencos 2 th 1 ( 1 ) 1 sencos 2 th
th c l th
E E
P
X B B X X
(2.5)
y la tensión en la carga es:
max 1 1
2 1 sin 2 1 sin
th P
c l
E E
V
B B X
22
Una rápida comparación con las ecuaciones (2.3) y (2.4) muestra que tanto Pmax y VmaxP incrementan en la misma proporción cuando las capacitancias de la red son tomadas en cuenta y la compensación se añade.
2.2 PRINCIPIO DE FUNCIONAMIENTO DEL CEV
El CEV es un controlador en derivación de la tensión. En aplicaciones en las líneas de transmisión la susceptancia en paralelo conectada a través de un bus de media tensión es rápidamente variada con el fin de mantener la tensión constante en el bus de alta tensión.
Los CEV son dispositivos rápidos que por lo general actúan durante varios ciclos. El costo significante de un CEV es justificado cuando la velocidad es requerida para mejorar la estabilidad del sistema.
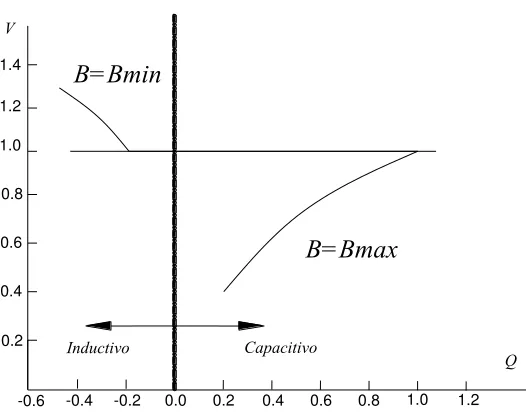
[image:31.612.174.437.329.535.2]La curva característica que relaciona la tensión con la potencia de un CEV se muestra en la figura 2.2.
Figura 2.2 Curva QV de un CEV en estado estable.
En condiciones de estado estable, la potencia reactiva producida por el CEV está dada por
2
MV
Q BV (2.7)
Donde VMV es el bus de media tensión y B la susceptancia variable. Esta última obedece la siguiente ecuación
( )O
B K V V (2.8)
sujeto a
-0.6 0.2 0.4 0.6 0.8 1.0
V
0.2 0.4 0.6 0.8 1.0
Q
1.2 1.2
1.4
0.0 -0.2 -0.4
B=Bmin
B=Bmax
23
min max
B B B (2.9)
Donde K es la ganancia del CEV, V0 la tensión de referencia y BMIN , BMAX corresponden a las condiciones de conducción del extremo del tiristor.
En la figura 2.2 la impedancia del transformador de acoplamiento ha sido despreciada por simplicidad (por lo tanto V=VMV) en por unidad. La parte plana de la curva corresponde a las ecuaciones (2.7) y (2.8), la cual está muy cerca de una línea recta con una pequeña caída, debido al alto valor de K (del orden de 25-100 en la clasificación CEV). Las partes parabólicas de la curva corresponden a los límites de B en la ecuación (2.9).
Existen dos técnicas usadas para obtener una susceptancia variable [21]:
Reactor controlado por tiristores (TCR) Capacitor conmutado por tiristores (TSC) Combinación de los dos anteriores (TCR-TSC)
2.2.1 Reactor controlado por tiristores (TCR)
Aunque puede ser utilizado solo, se emplea en conjunto con capacitores fijos o TSC para obtener un control rápido y continuo de la potencia reactiva. [23]
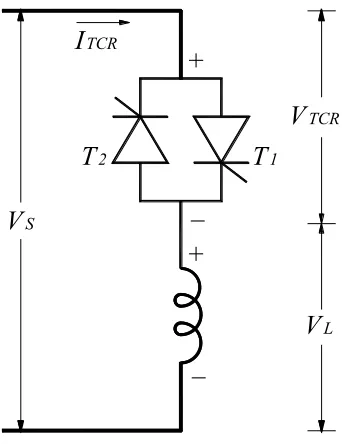
[image:32.612.219.390.465.687.2]Un TCR monofásico está compuesto de un par de válvulas de tiristores conectados en antiparalelo, T1 y T2, en serie con un reactor de núcleo de aire, como se muestra en la figura 2.3.
Figura 2.3 Reactor controlado por tiristores.
V
SI
TCRT
2T
1V
LV
TCR+
_
+
24
El par de tiristores conectados en antiparalelo actúa como un interruptor bidireccional, con una válvula de tiristores T1 conduciendo en medios ciclos positivos y una válvula de
tiristores T2 conduciendo en medios ciclos negativos de la fuente de tensión. El ángulo de
disparo de los tiristores es medido desde el cruce por cero de la tensión que aparece entre las terminales de la fuente.
El intervalo controlable del ángulo de disparo de un TCR, α, se extiende desde 90 a 180. Un ángulo de disparo de 90 ofrece la conducción total del tiristor con una corriente sinusoidal continua en el TCR. Como el ángulo de disparo es variado desde 90 hasta un valor cercano a 180, la corriente fluye en forma de pulsos discontinuos localizados simétricamente en ciclos positivos y negativos, como se muestra en la figura 2.4.
[image:33.612.112.503.295.661.2]Una vez que las válvulas de tiristores son disparadas la corriente comienza a disminuir, este proceso se conoce como conmutación en línea.
25
La corriente llega a cero cuando el ángulo de disparo es igual a 180. El disparo de los tiristores en ángulos por debajo de 90 introduce componentes de CD en la corriente, perturbando la operación simétrica de las dos ramas de válvulas en antiparalelo. Una característica del proceso de conmutación en línea, con el cual el TCR opera, es que una vez que la conducción en la válvula ha comenzado, el cambio en el ángulo de disparo solamente se puede realizar en el siguiente medio ciclo, lo que lleva al tiempo muerto del tiristor.
La fuente de tensión de la figura 2.3 esta expresada por:
sinS
v t V t (2.10)
Donde V es el valor pico de la tensión aplicada y es la frecuencia angular de la fuente de tensión. La corriente del TCR está dada por la ecuación (2.11).
0S di
L v t
dt (2.11)
Donde L es la inductancia del TCR. Integrando la ecuación (2.11), se obtiene
1 S
1 sin
i t v t dt C V t dt C
L L
(2.12)Donde C es constante. Resolviendo la ecuación (2.12) se tiene
V cosi t t C
L
(2.13)
Para la condición i t
0 la ecuación (2.13) se transforma en
V
cos cos
i t t
L
(2.14)
Do de α es el á gulo de disparo edido desde el cruce por cero de la te sió aplicada.
Un TCR trifásico está formado por tres TCR monofásicos conectados en delta como se muestra en la figura 2.5a. El inductor en cada fase se divide en dos partes, como en la figura 2.5b, uno en cada lado de la válvula de tiristores para prevenir que la tensión dañe los tiristores sí ocurre un cortocircuito en las terminales del reactor.
26
a) b)
Figura 2.5 a) TCR trifásico b) TCR con reactor dividido
2.2.2 Capacitor conmutado por tiristores (TCS)
Un TSC monofásico consiste en un par de válvulas conectadas en antiparalelo que actúan como un interruptor bidireccional en serie con un capacitor y un pequeño reactor limitador de corriente. Los tiristores permiten la conducción de número de medios ciclos. El capacitor no es controlado como el TCR [23].
Las válvulas de tiristores son encendidas en un instante cuando la tensión mínima es detectada a través de las válvulas para minimizar los transitorios por conexión. A excepción de los transitorios iniciales, la corriente del TSC es sinusoidal y libre de armónicos, evitando así la necesidad de cualquier filtro.
[image:35.612.135.338.55.267.2]En la figura 2.6 se muestra la configuración de un TSC.
27
El pequeño reactor que se observa en figura 2.6 es instalado para limitar la corriente transitoria durante las condiciones de sobretensión, así como cuando la conexión se realiza en una polaridad inapropiada de la tensión. La magnitud del reactor es elegida para dar una frecuencia resonante natural de cuatro o cinco veces la frecuencia nominal del sistema, la cual asegura que la inductancia no creará un circuito resonante con la red y para que no dificulte el control del TSC.
Otra función del reactor en serie es en combinación con el capacitor, ambos actúan como un filtro de armónicas generadas por el TCR. En algunos casos, se proporcionan circuitos de descarga con los capacitores para disipar rápidamente la carga remanente en el capacitor después de la desconexión.
En la figura 2.7 se muestra la configuración de un TSC trifásico.
Figura 2.7 Diagrama de un TSC trifásico
Un TCS trifásico como el de la figura anterior está formado por tres TCS monofásicos conectados en delta, los cuales son usualmente alimentados por un devanado secundario conectado en delta de un transformador reductor. El devanado primario de dicho transformador es conectado en estrella con neutro flotante.
E la práctica u TSC i plica “n número de bancos de TSC trifásicos en derivación de la misma capacidad.
2.2.3 Reactor controlado por tiristores-Capacitor conmutado por tiristores (TCR-TSC)
28
pueden ser conmutados en pasos discretos, mientras que la duración de la potencia reactiva de cada paso es controlada por el TCR. Así que el máximo valor inductivo del CEV corresponde a la capacidad del TCR.
La configuración de un TCR-TSC se muestra en la figura 2.8. Como el tamaño del TCR es pequeño, la generación de armónicos también es reducida. Las ramas de TSC son sintonizadas con el reactor en serie para diferentes frecuencias armónicas dominantes. Para evitar una situación en la cual todos los TSCs y sus filtros son desconectados (con el TCR en operación), se proporcionan un filtro capacitivo.
[image:37.612.159.453.279.541.2]Las principales causas para el desarrollo de TSC-TCR fueron para una mejor flexibilidad de operación del compensador durante largos disturbios y para reducir las pérdidas en estado estable.
Figura 2.8 Diagrama de un CEV formado por un TCR-TSC
29
CAPÍTULO
III.
MODELO
DEL
SISTEMA
DE
PRUEBA
Y
EL
COMPENSADOR
ESTÁTICO
DE
VARs
En este capítulo se presenta un modelo matemático generalizado del sistema eléctrico de
potencia con características deseables para el estudio de estabilidad de tensión y colapso
de tensión en redes eléctricas de naturaleza compleja. El modelo desarrollado tiene una
estructura modular y permite la representación detallada de las características del sistema
de potencia con mayor influencia en estos fenómenos, así como la utilización de técnicas
de análisis de flujos de potencia.
Los estudios de flujos de potencias permiten determinar las cantidades de potencias
activa y reactiva que circula a través de las líneas de transmisión, adicionalmente a esto es
posible supervisar el comportamiento de la tensión y el ángulo de cada uno de los buses
asociados a la red eléctrica.
Si el SEP trabaja en forma estable las corridas de flujos mostraran flujos estables y
balanceados, pero si se presenta alguna perturbación dentro del mismo estas corridas
mostraran el impacto de la perturbación sobre el sistema, permitiendo observar la
variación del flujo hacia puntos de falla, el abatimiento de las tensiones en los buses
cercanos a la perturbación. Esto permitirá proponer soluciones para mantener al SEP en
operación durante y después de la perturbación.
Una de las posibles propuestas que ayudarían al sistema eléctrico a mantenerse en
operación son los dispositivos FACTS. Estos dispositivos presentan una amplia gama de
posibilidades que permiten respaldar propiamente el buen funcionamiento y operación
del SEP. Particularmente se analizara la influencia de un CEV ante una condición donde la
tensión se colapse al presentarse una falla.
Al conectar un CEV en un bus del sistema, este se ve modificado y se tiene que realizar un
nuevo estudio de flujos para observar el efecto del dispositivo. Es por ello que se necesita
definir un sistema de prueba en donde se conectará el CEV lo que conlleva a analizar el
modelo del dispositivo y cómo actúa durante un disturbio.
3.1 DESCRIPCIÓN DEL SISTEMA DE PRUEBA
El sistema de prueba consiste en un sistema propuesto en la referencia [24], el cual consta
de dos generadores de 400 kV unidos por líneas de transmisión con impedancia propia y
30
Figura 3.1 Sistema de prueba de tres buses.
Los datos del sistema de prueba se presentan tabla 3.1 y en la tabla 3.2, donde los valores
están en por unidad considerando una potencia base de 100 MVA y una tensión base de
400 kV.
Tabla 3. 1 Resistencias y reactancias del sistema de transmisión del sistema de prueba
Bus a bus Resistencia [p.u]
Reactancia [p.u]
1‐2 0.00566 0.05018
2‐3 0.00566 0.00566
Tabla 3. 2 Tensiones y potencias iniciales del sistema de prueba
Bus Tensión
[p.u]
Potencia real [p.u]
Potencia imaginaria [p.u]
1 1.0 9.0 ‐
2 1.0 0.0 0.0
3 1.0 9.0 ‐
3.2 SISTEMA DE PRUEBA EN ESTADO ESTABLE
3.2.1 Estudio de flujos de potencia
La matriz de admitancia nodal representa las conexiones que existen entre los buses del
sistema. Con los datos de la tabla 3.1 se puede obtener por simple inspección la matriz
YBUS, para el caso del sistema de prueba la matriz de admitancia nodal será una matriz de
3x3, esto por el número de buses, por lo que tendrá la forma de la ecuación (3.1).
11 12
21 22 23
32 33 0
0
Y Y Y Y Y
Y Y
BUS
Y (3.1)
31 2.22155 2.22155 0 19.67504 19.67504
2.22155 4.44309 2.22155
19.67504 39.35007 19.67504
2.22155 2.22155
0
19.67504 19.67504
j j
j j j
j j BUS
Y (3.2)
Se realiza el estudio de flujos de potencia del sistema de prueba en estado estable por
medio del método de Newton‐Raphson, debido a la rapidez con que este converge a
comparación del método Gauss‐Seidel.
El sistema de ecuaciones que se tiene que resolver es el siguiente:
( )k ( )k ( )k
P J V (3.3)
Dónde
( )k
P es el vector de potencias para la iteración k.
( )k
J es la matriz jacobiana.
( )k
V es el vector de error de tensiones para la condición k.
Para determinar los elementos de la matriz jacobiana es necesario primeramente
determinar las ecuaciones de flujos de potencia tanto activa como reactiva, estas
expresiones se obtienen aplicando las ecuaciones (1.6) y (1.7) para los buses 2,3
respectivamente. El bus 1 no introduce ecuación debido a que se trata del nodo
compensador.
Para el bus 2:
2 2 2 1 21 1 2 21 2 2 22 2 2 22
2 3 23 3 2 23
cos cos
cos
P f p V V Y V V Y
V V Y
(3.4)
2 1 21 1 2 21 2 2 22 2 2 22
2 2
2 3 23 3 2 23
sin sin
sin
V V Y V V Y
Q f q
V V Y
(3.5)
Para el bus 3:
3 3 3 1 31 1 3 31 3 2 32 2 3 32
3 3 33 3 3 33
cos cos
cos
P f p V V Y V V Y
V V Y
32
3 1 31 1 3 31 3 2 32 2 3 32
3 3
3 3 33 3 3 33
sin sin
sin
V V Y V V Y
Q f q
V V Y
(3.7)
y la matriz jacobiana del sistema de prueba tendrá la forma siguiente:
( ) ( )
( ) ( )
2 2 2 2
2 3 2 3
( ) ( )
( ) ( )
3 3 3 3
2 3 2 3
( )
( ) ( )
( ) ( )
2 2 2 2
2 3 2 3
( ) ( )
( ) ( )
3 3 3 3
2 3 2 3
k k k k k k k k k k k k k k k k k
P P P P V V
P P P P V V
Q Q Q Q V V
Q Q Q Q V V
J (3.8)
Los elementos de la ecuación (3.8) se obtienen derivando parcialmente las ecuaciones
(3.4) y (3.5) para el bus 2 y las ecuaciones (3.6) y (3.7) para el bus 3, estas expresiones son:
Bus 2
2
2 1 21 1 2 21 2 3 23 3 2 23
2
sin sin
P
V V Y V V Y
(3.9)
2
2 3 23 3 2 23
3
sin
P
V V Y
(3.10)
2
1 21 1 2 21 2 22 2 2 22 3 23 3 2 23
2
cos 2 cos cos
P
V Y V Y V Y
V
(3.11)
2
2 23 3 2 23
3
cos
P
V Y
V
(3.12)
2
2 1 21 1 2 21 2 3 23 3 2 23
2
cos cos
Q
V V Y V V Y
(3.13)
2
2 3 23 3 2 23
3
cos
Q
V V Y
(3.14)
2
1 21 1 2 21 2 22 2 2 22 3 23 3 2 23
2
sin 2 sin cos
Q
V Y V Y V Y
V