INSTITUTO POLITÉCNICO
NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD ZACATENCO
IMPLEMENTACIÓN DEL BUS DE PROCESO QUE MARCA EL
ESTÁNDAR IEC 61850 EN EL ESQUEMA DE PROTECCIÓN DE UNA
LÍNEA DE 230kV DE LA COMISIÓN FEDERAL DE ELECTRICIDAD
TESIS PROFESIONAL
Que para obtener el título de:
INGENIERO ELECTRICISTA
PRESENTAN:
GARCÍA ANGELES JOSÉ LUIS
IBARRA VÁZQUEZ JORGE
LÓPEZ GARCÉS FRANCISCO JAVIER
ASESORES:
ING. ABRAHAM ROMERO BUGARIN
ING. PEDRO YEBRA MORON
Agradecimientos
Agradecimientos
A NUESTROS PADRES:
A quienes jamás encontraremos la forma de agradecer el cariño,
comprensión y apoyo brindado en los momentos buenos y malos de
nuestras vidas, hacemos este triunfo compartido, sólo esperando
que comprendan que nuestros ideales y esfuerzos son inspirados en
cada uno de ustedes.
Índice
1
Índice
Glosario ... 1
Introducción ... 2
CAPÍTULO 1 Fundamentos de protecciones eléctricas ... 4
1.1 ¿Que es un sistema eléctrico de potencia? ... 4
1.1.1 Subsistemas del sistema eléctrico de potencia ... 5
1.1.2 Componentes del sistema eléctrico de potencia ... 6
1.2 Protección por relevadores ... 9
1.2.1 Características de las protecciones ... 10
1.2.2 Función de un Relevador de Protección ... 10
1.2.3 Características Funcionales de los Relevadores de Protección ... 10
1.2.4 Protección Primaria y de Respaldo ... 11
1.3 Tipos de Relevadores ... 11
CAPÍTULO 2 Protección de una línea de transmisión ... 13
2.1 Líneas de Transmisión ... 13
2.2 Esquema normalizado de protección para una línea de transmisión de 230/400kV ... 14
2.3 Características generales para los esquemas de protección de líneas de transmisión ... 14
2.4 Protección diferencial de línea 87L (PP1, PP2 en 400 kV y 230 kV) ... 15
2.5 Protección de distancia 21/21N (PP2 en 400 y 230 KV) ... 15
2.6 Protección de respaldo 67/67N ... 16
2.7 Protección para falla de interruptor 50FI ... 17
CAPÍTULO 3 Fibra óptica ... 19
3.1 Definición ... 19
3.2 Composición física ... 20
3.3 Tipos de fibras ópticas ... 20
3.3.1 Fibras ópticas Multimodo ... 20
3.3.2 Fibras ópticas Monomodo ... 21
3.4 Ventajas de la fibra óptica ... 21
3.5 Desventajas de la fibra óptica ... 21
Índice
II
4.1 Descripción general ... 22
4.2 Niveles de estación, nodos lógicos e interfaces de comunicación ... 24
4.3 Interfaces lógicas ... 28
4.4 Bus de Proceso ... 29
4.4.1 Descripción general ... 29
4.4.2 Mensajes en IEC61850 ... 29
4.4.2.1 Mensajes GOOSE ... 30
4.4.2.2 Valores Muestreados ... 30
4.4.3 Merging Unit ... 31
4.4.4 Arquitecturas del Bus de Proceso ... 32
4.4.4.1 Comparación de ambas arquitecturas ... 35
4.4.4.1.1 Escabilidad ... 35
4.4.4.1.2 Sincronización ... 36
4.4.4.1.3 Costo ... 37
4.4.5 Implementación del Bus de Proceso ... 37
CAPÍTULO 5 Sistema HardFiber ... 39
5.1 Descripción general ... 39
5.2 Brick ... 41
5.2.1 Funcionamiento interno ... 43
5.2.2 Indicadores LED del Brick ... 44
5.2.3 Velocidad de muestreo ... 45
5.2.4 Entradas de Corriente Alterna ... 45
5.2.5 Entradas de Corriente Directa ... 46
5.2.6 Contactos de entrada ... 47
5.2.7 Contactos de salida ... 48
5.2.7.1 De estado sólido ... 48
5.2.7.2 Tipo C ... 49
5.2.7.3 Contacto Sellado ... 49
5.2.8 Dimensiones del Brick ... 50
5.2.9 Alambrado del Brick ... 51
Índice
III
5.3.1 Cables de cobre ... 55
5.3.2 Cables de fibra a la intemperie ... 56
5.3.3 Cables de fibra al interior ... 57
5.4 Administrador de Fibras ... 57
5.4.1 Dimensiones del Administrador de fibras ... 58
5.5 Tarjeta de Proceso ... 59
5.6 Programación del SHF ... 60
5.7 Relés Universales GE Multilin ... 61
5.8 Auto Diagnósticos y Problemas del Brick ... 62
5.8.1 Descripción General ... 62
5.8.2 Auto Diagnósticos ... 62
5.8.3 Crosschecking ... 62
5.9 Ensayos y puesta en servicio ... 63
CAPÍTULO 6 Solución al bus de proceso que marca el estándar IEC 61850 ... 68
6.1 Descripción del esquema de protección instalado actualmente ... 68
6.1.1 Protección de Línea ... 71
6.2 Descripción del esquema de protección propuesto... 74
6.2.1 Diseño aplicando el sistema HardFiber ... 74
6.2.2 Selección de DEI’s ... 75
6.2.2.1 DEI’s de Protección ... 75
6.2.3 Mando del interruptor ... 75
6.2.4 Estados del interruptor ... 75
6.2.5 Diagrama unifilar de la línea ... 76
6.2.6 Entradas y salidas de la línea ... 77
6.2.7 Ubicación y cableado del Brick ... 77
6.2.8 Determinación de cables ... 78
6.2.8.1 Cables de cobre ... 78
6.2.8.2 Cables de fibra a la intemperie ... 79
6.2.8.3 Cables de fibra al interior ... 79
6.2.9 Administrador de fibras ... 79
Índice
IV
7.1 Comparación técnica ... 80
7.1.1 Configuración del SHF ... 83
7.1.2 Pruebas D60 Convencional ... 88
7.1.3 Pruebas D60 Brick ... 99
7.1.4 Comparación de resultados entre los dos tipos de sistemas ... 109
7.2 Comparación económica ... 110
7.2.1 Consideraciones Previas ... 111
7.2.2 Costo total del sistema convencional ... 112
7.2.3 Costo total del Sistema HardFiber ... 114
7.2.4 Resumen de costos y tiempo de ejecución ... 116
7.2.5 Balance económico ... 117
Conclusiones ... 119
Bibliografía ... 122
Índice de tablas y figuras ... 124
Glosario
1
Glosario
IEC : Por sus siglas en inglés Comisión Electrotécnica Internacional MU: Merging Unit
SHF: Sistema Hard Fiber
POTT: lógica programable de Disparo Transferido Permisivo de Sobre alcance
PUTT: Disparo Transferido Permisivo de Sub alcance
NOM: Norma Oficial Mexicana
ANSI: Instituto Nacional Americano de Estándares
NRF: Normas de Referencia
SAS: Sistemas de Automatización de Subestaciones
SEP: Sistema Eléctrico De Potencia
DEI: Dispositivo Electrónico Inteligente
GOOSE: Evento de Subestación Orientado a Objetos Genéricos
SV: Valores Muestreados
IHM: Interfaz Hombre Maquina
LN: Nodos Lógicos
Introducción
2
Introducción
Desde que la tecnología digital llego a las subestaciones eléctricas, no ha dejado de avanzar con éxito ofreciendo una alternativa mucho más sencilla y ventajosa en costos a las tecnologías anteriores. Pero a pesar de esto, la implementación de dicha tecnología no ha llegado a ser completa, ya que aún quedan áreas en las cuales, las tecnologías anteriores siguen representando la única alternativa.
Una de las aportaciones más importantes que ha tenido este avance de la tecnología digital, ha sido la aparición de las comunicaciones digitales y su progresiva implementación, ya que esto ha logrado el acceso a las subestaciones eléctricas desde una computadora personal, mediante la utilización de un software especializado, para las operaciones de control, medición, protección y monitoreo, lo cual está representado por el estándar IEC 61850.
El estándar IEC 61850, en pocas palabras, propone una nueva funcionalidad basada en el entorno de las comunicaciones, creando un nuevo estándar que permita la interoperabilidad entre dispositivos de distintos fabricantes, esto mediante la normalización de la información de los dispositivos que constituyen un sistema, para lo que se han definido formatos de intercambio de información entre dichos dispositivos.
Una aportación significativa, de dicho estándar, es la inclusión del muestreo de las señales analógicas, lo cual llevo a la aparición de lo que se ha nombrado bus de proceso.
Introducción
3
Los elementos básicos que constituyen el bus de proceso son los equipos primarios (transformadores de corriente, transformadores de potencial, interruptores, seccionadores, etc.), que se conectan mediante las llamadas MU con los dispositivos de protección, control y medición.
Las MU tienen el reto de sustituir con una o varias fibras ópticas los cables de cobre que conectan actualmente los equipos primarios con los dispositivos que constituyen el sistema de protección, control y medición.
Como solución al bus de proceso que marca el estándar IEC 61850, General Electric Multilin, ha desarrollado un sistema llamado HardFiber, el cual aplica el concepto de una MU, y es un sistema con entradas y salidas, para aplicaciones de protección, control y medición, en una subestación eléctrica.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
4
CAPÍTULO 1
Fundamentos de protecciones eléctricas
1.1 ¿Que es un sistema eléctrico de potencia?
Al conjunto de recursos materiales y humanos que se encargan de la generación, transmisión y distribución de la energía eléctrica, con máxima disponibilidad y mínimas perdidas de acuerdo a limites especificados de tensión, corriente y frecuencia, tomando en cuenta la seguridad y aspectos ambientales.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
5
1.1.1 Subsistemas del sistema eléctrico de potencia
Un sistema eléctrico está compuesto, en términos generales, por los siguientes subsistemas:
1º. Generación de energía: La energía eléctrica se genera en las centrales eléctricas. Una central eléctrica es una instalación que utiliza una fuente de energía primaria para hacer girar una turbina que, a su vez, hace girar un alternador, que produce energía en corriente alterna.
2º. Transmisión: La energía se transporta, frecuentemente a gran distancia de su centro de producción, a través de la red de transporte, encargada de enlazar las centrales con los puntos de utilización de energía eléctrica.
3º. Subestaciones: Las instalaciones llamadas subestaciones son plantas transformadoras que se encuentran junto a las centrales generadoras (subestación elevadora) y en la periferia de las diversas zonas de consumo (subestación reductora), enlazadas entre ellas por la red de transporte.
4º. Distribución: Las redes de distribución de energía se encuentran en áreas urbanas y rurales, pueden ser aéreas, o subterránea. La red de distribución está formada por la red en alta tensión y en baja tensión.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
6
Figura 1. 2 Subsistemas del Sistema Eléctrico de Potencia
1.1.2 Componentes del sistema eléctrico de potencia
El Sistema Eléctrico de Potencia está conformado, de manera general de los siguientes componentes:
1) Generadores: Dispositivo electromecánico utilizado para convertir energía mecánica en energía eléctrica por medio de la inducción electromagnética.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
7
2) Barras: Es el nodo eléctrico que interconecta circuitos, tales como generadores, transformadores, líneas de transmisión, alimentadores, etc.
Figura 1. 4 Barras
3) Líneas de transmisión: Una línea de transmisión es una estructura material utilizada para dirigir la transmisión de energía, comprendiendo el todo o una parte de la distancia entre dos lugares que se comunican
Figura 1. 5 Líneas de Transmisión
Capítulo
1
Fundamentos
de
protecciones
eléctricas
8
Figura 1. 6 Interruptor
5) Transformadores de potencia: Se denomina transformador a una máquina
electromagnética que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna, manteniendo la frecuencia.
Figura 1. 7 Transformador de Potencia
6) Transformadores de instrumento: Son dispositivos encargados de disminuir los valores de corriente y tensión a niveles medibles por los equipos de medición y protección.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
9
7) Relevadores de protección: Es un dispositivo encargado de detectar condiciones anormales en cualquier punto del sistema eléctrico de potencia.
Figura 1. 9 Relevadores de Protección
1.2 Protección por relevadores
La protección por relevadores son un elemento de control y monitoreo con el que debe contar un sistema eléctrico de potencia.
Tiene tres características principales:
1) Monitorear la operación adecuada del sistema
2) Prevenir fallas eléctricas
3) Mitigar los efectos de una falla eléctrica
Capítulo
1
Fundamentos
de
protecciones
eléctricas
10
1.2.1 Características de las protecciones
1) Confiabilidad: la precisión o seguridad de que la protección va a operar correctamente.
2) Selectividad: mantener la máxima continuidad del servicio con la mínima desconexión del equipo.
3) Velocidad de operación: mínimo tiempo de falla con el consecuente daño mínimo del equipo.
4) Simplicidad: mínimo equipo de protección y circuitería asociada para alcanzar los objetivos del sistema de protecciones.
5) Economía: máxima protección al mínimo costo total.
1.2.2 Función de un Relevador de Protección
Desconectar mediante interruptores de manera rápida el elemento que haya sufrido un corto circuito o que comience a operar de forma no deseada
Identificar el tipo de falla y su locación
Mitigar los efectos de corto circuito y otras operaciones anormales
Comunicación de alta velocidad con otros relevadores
1.2.3 Características Funcionales de los Relevadores de Protección
Sensibilidad para que funcione en forma segura cuando es requerido.
Selectividad para ser capaz de operar con rapidez en las condiciones adecuadas y que no opere cuando no se requiera.
Rapidez para funcionar en el menor tiempo posible.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
11
1.2.4 Protección Primaria y de Respaldo
Protección Primaria: Es la primera línea de defensa contra las fallas que pudieran ocurrir, es decir son los primeros relevadores que deben operar para liberar el equipo fallado cuando se presenta alguna condición anormal en el elemento protegido.
Protección de Respaldo: Se activa sólo cuando la protección primaria falla o existe algún traslape de zona de protección, evitando así zonas ciegas.
1.3 Tipos de Relevadores
Relevador de sobrecorriente: este relevador responde a la magnitud de corriente sobre un valor especificado.
Relevador diferencial: este relevador responde a la diferencia entre dos o más corrientes arriba de un valor especificado.
Relevador de sobrevoltaje: responde a una magnitud de tensión por encima de un valor especificado.
Relevador de baja tensión: responde a una magnitud de tensión por debajo de un valor especificado.
Relevador de potencia: responde al producto de la magnitud de la tensión, la corriente y el coseno del ángulo de fase entre la tensión y la corriente, y esta ajustado para operar por encima de un valor especificado.
Capítulo
1
Fundamentos
de
protecciones
eléctricas
12
Relevador de frecuencia: responden a valores de frecuencia arriba o debajo de un valor especificado.
Relevador de falla de interruptor: Este relevador es específicamente utilizado para tomar las medidas oportunas para mitigar una falla en el sistema cuando el interruptor que normalmente se espera que haga la desconexión del elemento falla por cualquier motivo. Es decir, esta función está diseñada para detectar cualquier falla de los interruptores que no se abren cuando reciben una orden de disparo.
Capítulo
2
Protección
de
una
línea
de
transmisión
13
CAPÍTULO 2
Protección de una línea de transmisión
2.1 Líneas de Transmisión
Las líneas de transmisión son una parte muy importante del Sistema Eléctrico de Potencia, puesto que estas proveen el camino para la transferencia de energía entre las fuentes de generación y los consumidores.
Los sistemas de protección de líneas de transmisión están diseñados para identificar la localización de la falla y aislar sólo la sección fallada. El desafío clave para la protección de la línea de transmisión se encuentra en la confiabilidad de detectar y aislar las fallas que comprometan la estabilidad del sistema.
Los niveles de tensión de operación de las líneas se pueden observar en la siguiente tabla:
Tabla 1. 1Niveles de tensión para líneas de transmisión en Comisión Federal de Electricidad (NRF-041-2010)
Tipo de Líneas Nivel de tensión
Línea de distribución 2.4 kV a 34.5 kV Línea de Subtransmisión 69 kV a 161 kV
Capítulo
2
Protección
de
una
línea
de
transmisión
14
2.2 Esquema normalizado de protección para una línea de
transmisión de 230/400kV
De acuerdo con la norma NRF-041-2010 de la CFE, los esquemas para protecciones de líneas de 400 y 230 kV, deben contar con lo siguiente:
a) PP1 protección primaria 1.
b) PP2 protección primaria 2.
c) PR protección de respaldo.
d) 50FI protección contra falla de interruptor.
2.3 Características generales para los esquemas de
protección de líneas de transmisión
De acuerdo con la norma NRF-041-2010 de la CFE, los esquemas de protección de estas líneas, deben cumplir con las características siguientes:
a) Disparo monopolar, con salidas independientes de disparo por polo y para disparo tripolar.
b) Lógica de arranque monopolar y tripolar del relevador de falla de interruptor.
c) Lógica de arranque monopolar y tripolar del relevador de recierre.
Capítulo
2
Protección
de
una
línea
de
transmisión
15
2.4 Protección diferencial de línea 87L (PP1, PP2 en 400 kV
y 230 kV)
De acuerdo con la norma NRF-041-2010 de la CFE, debe cumplir con lo siguiente:
a) El relevador diferencial debe contar con alarma y bloqueo por falla de canal.
b) Debe contar con al menos tres funciones adicionales de protección de distancia, con medición para fallas entre fases y medición para fallas de fase a tierra, cuando así se requiera con base en la aplicación del esquema de protección.
c) Compensación interna mediante ajustes del relevador para diferentes relaciones de TC’s en las terminales de la línea.
d) Operación monopolar.
e) Función de autodiagnóstico.
f) La salida del relevador para comunicación con su extremo remoto, siempre debe ser óptica.
g) Localización de fallas.
h) Esquema de línea muerta (función de disparo instantáneo contra energización de línea aterrizada o con falla)
2.5 Protección de distancia 21/21N (PP2 en 400 y 230 KV)
De acuerdo con la norma NRF-041-2010 de la CFE, debe cumplir con lo siguiente:
a) Esquema microprocesado de distancia con 3 zonas de protección hacia adelante y debe contar con una cuarta zona con la opción de seleccionar su direccionalidad hacia atrás o adelante. b) Esquema de comparación direccional con lógica programable PUTT/POTT.
Fallas entre fases con característica MHO o poligonal,
Unidades de medición de impedancias.
Para fallas A-B,
Capítulo
2
Protección
de
una
línea
de
transmisión
16
Para fallas C-A.
Fallas de fase a tierra con característica poligonal,
Unidades de medición de impedancia.
Para fallas A-T,
Para fallas B-T,
Para fallas C-T.
c) Unidad de bloqueo del disparo por oscilaciones, con opción de selección de zonas a bloquear.
d) Detector de falla de fusible en señales de potencial para alarma y bloqueo. De acuerdo a NOM-008.
e) Lógica de inversión de corriente. f) Función de autodiagnóstico.
g) Preparado para operar en líneas con compensación serie y adyacentes. h) Localización de fallas.
i) Esquema de línea muerta (función de disparo instantáneo contra energización de línea aterrizada o con falla).
2.6 Protección de respaldo 67/67N
De acuerdo con la norma NRF-041-2010 de la CFE, este relevador debe cumplir con lo siguiente:
Unidades de medición de corriente para fallas de fase a tierra y para fallas entre fases, con características de tiempo inverso con curvas IEC Y ANSI: inversa, moderadamente inversa, muy inversa y extremadamente inversa como mínimo.
a) Debe contar con unidades de sobrecorriente para fallas entre fases y de fase a tierra instantáneas.
Capítulo
2
Protección
de
una
línea
de
transmisión
17
c) Polarización seleccionable con corriente de secuencia cero y tensión de secuencia cero, tensión de secuencia negativa y tensión en cuadratura.
d) Unidad direccional para fallas trifásicas. e) Localización de fallas
f) Función de recierre tripolar g) Función de autodiagnóstico.
h) Con lógica POTT, preparado para operar con inversión de corriente.
i) Con unidad de operación direccional de secuencia negativa, cuando así se requiera.
2.7 Protección para falla de interruptor 50FI
De acuerdo con la norma NRF-041-2010 de la CFE, este relevador debe cumplir con lo siguiente:
a) Con tres unidades de medición de corriente de fase para esquemas de líneas de transmisión con lógica de arranque por disparo monopolar y tripolar y con salida de redisparo por fase y una de disparo tripolar.
b) Con temporizadores independientes para las funciones de redisparo y disparo.
Capítulo
2
Protección
de
una
línea
de
transmisión
18
Capítulo 3
Fibra
Óptica
19
CAPÍTULO 3
Fibra óptica
3.1 Definición
Las fibras ópticas son filamentos de vidrio de alta pureza extremadamente compactos: El grosor de una fibra es similar a la de un cabello humano, entre sus principales características se puede mencionar que son compactas, ligeras, con bajas pérdidas de señal, amplia capacidad de transmisión y un alto grado de confiabilidad debido a que son inmunes a las interferencias electromagnéticas de radio-frecuencia.
20
3.2 Composición física
La fibra óptica fibra óptica se encuentra compuesta de 3 capas de material:
El centro o núcleo: cuya estructura y dimensiones dependen del tipo de fibra óptica.
El revestimiento: de 125 μm de diámetro y construido de dióxido de silicio SiO2.
El recubrimiento primario: de acrilato y 245 μm de diámetro.
Figura 3. 1Elementos de la fibra óptica
3.3 Tipos de fibras ópticas
Las fibras ópticas utilizadas actualmente en el área de las comunicaciones se clasifican fundamentalmente en dos grupos según el modo de propagación: Fibras Multimodo y Fibras Monomodo.
3.3.1 Fibras ópticas Multimodo
Son aquellas que pueden guiar y transmitir varios rayos de luz por sucesivas reflexiones.
Capítulo 3
Fibra
Óptica
21
3.3.2 Fibras ópticas Monomodo
Son aquellas que por su especial diseño pueden guiar y transmitir un solo rayo de luz (un modo de propagación) y tiene la particularidad de poseer un ancho de banda elevado.
Figura 3. 3 Representación de una fibra óptica monomodo
3.4 Ventajas de la fibra óptica
Es más fácil de instalar, debido a su ductilidad y flexibilidad.
Inmunidad a interferencias Electromagnéticas.
No conduce electricidad.
Baja atenuación.
Pequeño tamaño, por lo tanto ocupa poco espacio.
3.5 Desventajas de la fibra óptica
El costo es relativamente alto en comparación con los otros tipos de cable.
Fragilidad de las fibras.
Dificultad de reparar un cable de fibra roto.
Capítulo 4
Estándar
IEC
61850
22
CAPÍTULO 4
Estándar IEC 61850
4.1 Descripción general
El estándar IEC 61850 “Redes y Sistemas de Comunicación en Subestaciones” se aplica en los sistemas de automatización de las subestaciones (indicados en el estándar como SAS). Fue elaborada por el comité técnico 57 de IEC “Sistema de control de Potencia y comunicaciones asociadas”.
El propósito principal del estándar es definir una arquitectura de comunicaciones que permita la integración de los distintos equipos de una subestación y que sea independiente del fabricante.
Para esta tarea no basta con elaborar un determinado protocolo de comunicaciones que luego sea implementado por los equipos sino que se planteó el modelado total de la subestación, tanto para dispositivos físicos (relés, transformadores, interruptores, equipos de control, etc.) como para funciones (protección, control, medición, etc.) que son descritas en un lenguaje apropiado también definido por el estándar.
El gran salto de pasar de equipos electromecánicos a digitales microprocesados permitió el desarrollo de las comunicaciones entre equipos y con ello, que se tenga la posibilidad de un control distribuido en las funciones de protección, control y monitoreo, ya sea local o remoto, dentro de un mismo DEI.
Capítulo 4
Estándar
IEC
61850
23
IEC 61850 tomó la experiencia de la industria que demostró la necesidad de desarrollar un protocolo de comunicación estándar, que debería soportar la interoperabilidad entre DEI’s de diferentes fabricantes para compartir datos, servicios y funciones.
El estándar IEC 61850 propone no sólo un nuevo concepto de automatización en subestaciones, basado en una nueva arquitectura de comunicaciones, sino que también define modelos de información, y lenguajes de configuración. Asimismo estandariza la utilización de redes Ethernet con prioridad, define el intercambio de mensajes críticos denominados GOOSE, como así también valores muestreados para las mediciones de los transformadores de instrumento. Estas mediciones pueden realizarse a través de nuevos modelos de transformadores de instrumento, cuyos valores de salida son digitales o mediante unidades específicas que convierten las mediciones analógicas convencionales en información digital.
IEC 61850 es un conjunto de normas agrupadas en diez partes o capítulos. Está compuesta por las siguientes secciones:
Parte 1: Introducción y panorama general.
Parte 2: Glosario.
Parte 3: Requisitos Generales.
Parte 4: Sistema y Dirección de Proyectos.
Parte 5: Requisitos de comunicación para las funciones y modelos de los dispositivos.
Parte 6: Descripción del idioma de configuración para la comunicación en subestaciones eléctricas relacionadas con DEI’s.
Parte 7-1: Principios y modelos.
Parte 7‐2: Servicios de Comunicación Abstractos (ACSI).
Parte 7-3: Clases de datos comunes.
Parte 7‐4: Clases de Nodos Lógicos Compatibles y Clases de Datos.
Parte 8‐1: Mapeo de MMS y la ISO/IEC 8802‐3.
Parte 9‐1: Valores Muestreados en el Enlace Serial Unidireccional Punto a Punto.
Parte 9‐2: Valores Muestreados en la ISO 8802‐3.
Capítulo 4
Estándar
IEC
61850
24
4.2 Niveles de estación, nodos lógicos e interfaces de
comunicación
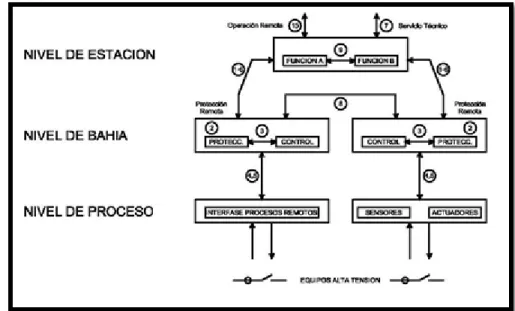
En toda subestación eléctrica, sin importar su tamaño, su nivel de tensión y complejidad se pueden definir tres niveles:
Nivel de estación
Nivel de bahía
Nivel de proceso
En el nivel de estación encontramos a la interfaz hombre máquina (IHM), computadora central con su base de datos, unidad terminal remota, gateway, equipos de telecomunicaciones, entre otros. En el nivel de bahía se encuentran los equipos de protección, control y medición.
Por último, en el nivel de proceso se encuentra el equipo primario, es decir, los interruptores de potencia, seccionadores, sensores, transformadores de corriente, transformadores de potencial, etc.
Los tres niveles mencionados intercambian información a través de distintas interfaces.
Capítulo 4
Estándar
IEC
61850
25
Descripción de interfaces (IF):
IF1: datos de protección intercambiados entre los niveles de bahía y estación.
IF2: datos de protección intercambiados entre los niveles de bahía y otro equipo remoto.
IF3: datos intercambiados dentro del nivel de bahía.
IF4: intercambio de datos con los transformadores de tensión y corriente entre niveles de bahía y proceso.
IF5: datos de control intercambiados entre los niveles de bahía y proceso.
IF6: datos de control intercambiados entre los niveles de bahía y estación.
IF7: información intercambiada entre el lugar de trabajo del ingeniero (en un lugar remoto) y el nivel de estación.
IF8: datos intercambiados directamente entre equipos de bahía.
IF9: datos intercambiados dentro del nivel de estación.
IF10: datos de control intercambiados entre el nivel de estación y un centro de control remoto.
Para lograr una libre distribución de las funciones entre los DEI’s la interoperabilidad deberá estar dada entre funciones, no sólo a nivel de equipos. Las mismas podrán estar divididas en partes que se desarrollan en distintos DEI’s pero comunicándose entre ellas (funciones distribuidas).
Capítulo 4
Estándar
IEC
61850
26
El siguiente ejemplo ayuda a comprender mejor algunos conceptos.
Figura 4. 2 Ejemplo de relación de nodos lógicos, funciones y dispositivos físicos
En la figura se muestran las relaciones entre funciones (arriba), nodos lógicos (a la izquierda) y equipos físicos (a la derecha). En este ejemplo básico el equipo de protección cuenta con las protecciones de sobrecorriente y distancia en el mismo dispositivo físico.
Por ejemplo, para la función de protección de sobrecorriente la información se toma del nodo lógico correspondiente al valor de corriente y al operar envía un disparo al interruptor. En ese caso la interfaz IHM puede recibir una alarma si así se desea. Para la protección de distancia se da la misma interacción de nodos lógicos sólo que se agrega el valor de tensión.
Capítulo 4
Estándar
IEC
61850
27
Se considera a una función como distribuida cuando es llevada a cabo por dos o más nodos lógicos ubicados en distintos equipos físicos, dado que todas las funciones terminan comunicadas de alguna u otra forma la definición apunta a aquellas funciones que son directamente desarrolladas en pasos en distintos equipos.
Cuando se implementan funciones distribuidas se deben definir los comportamientos de la misma ante la pérdida de algún nodo lógico por cualquier motivo, lo que puede derivar en el bloqueo de la función o una operación parcial.
Para observar un listado completo de funciones con su descripción consultar el anexo G del capítulo 5 del estándar y para obtener un listado completo de los nodos lógicos relacionados referirse al anexo A del mismo capítulo.
Dado que las comunicaciones dentro de las subestaciones tienen distintas necesidades en cuanto a calidad, tipo de información y velocidad se definen diferentes clases de mensajes acordes a los requerimientos. IEC 61850 permite configurar la prioridad de estos mensajes, para esto establece grupos de mensajes con características similares. Los mismos se observan en la tabla a continuación.
Tabla 4. 1Tabla de asignación de prioridades a los mensajes
Tipo Nombre Ejemplo
1 a Mensaje rápido-DISPARO Disparos
1 b Mensaje rápido-OTROS Comandos, mensajes simples 2 Mensaje de velocidad media Mediciones
3 Mensajes de baja velocidad Parámetros 4 Mensaje de valores de campo
(tensión, corriente)
Salida de los transductores o transformadores de nueva
generación 5 Función de intercambio de
archivos Para archivos grandes 6 a Mensaje de sincronización de
tiempo a
Sincronización de tiempo; bus de estación
6 a Mensaje de sincronización de tiempo b
Sincronización de tiempo, bus de proceso
7 Mensaje de comando con control de acceso
Capítulo 4
Estándar
IEC
61850
28
4.3 Interfaces lógicas
Los nodos lógicos comparten información a través de “interfaces lógicas” y las mismas pueden estar sobre interfaces físicas de muchas maneras. El estándar define dos medios o redes físicas llamadas Bus de Estación y Bus de Proceso.
De acuerdo a la Figura 4. 3 Disposición de interfaces físicas (buses) y lógicas., dentro del Bus de Estación pueden ubicarse las interfaces 1, 3 ,6 ,8 y 9 y compartir entre ellas ese medio. Las interfaces 4, 5 y 8 pueden agruparse en el Bus de Proceso. Como vemos, la interface 8 puede estar sobre cualquiera de los dos buses o sobre ambos inclusive. El estándar permite esta flexibilidad y, de hecho, también admite agrupar todas las interfaces en una sola red física siempre y cuando se satisfagan los requerimientos de transmisión de datos.
Figura 4. 3 Disposición de interfaces físicas (buses) y lógicas.
El Bus de Proceso es un punto muy importante dentro del estándar. Representa una interface entre los procesos (mediciones de tensión y corriente, temperatura, estado de los elementos de maniobra) y los equipos de protección y control.
Capítulo 4
Estándar
IEC
61850
29
al Bus de Proceso para ser adquirida por el o los equipos que la necesiten. Lo mismo para indicadores de estado de los equipos de maniobra, de esta manera se eliminaría el cableado de comando y monitoreo en cobre.
Una alternativa que permite mantener el equipo primario actual es utilizar una MU, lo que en nuestro caso sería un dispositivo llamado Brick. Estos equipos toman datos en el patio de la subestación, de maniobras, digitalizan esta información, la traducen en el estándar IEC 61850 para posteriormente enviarla a través del Bus de Proceso. De esta forma se estarían aprovechando los equipos primarios existentes, reduciendo el impacto económico. La implementación de este esquema es acorde con el estándar IEC 61850 ya que la misma no especifica cómo lograr la información sino la forma en que debe ser enviada.
Según el proceso o nivel se necesita distinta velocidad de transmisión. La red de comunicación de proceso necesariamente requiere tiempos muy exigentes (del orden de 4ms), sobre todo por estar ligada a funciones de protección.
4.4 Bus de Proceso
4.4.1 Descripción general
El Bus de Proceso está relacionado con la recopilación de información tales como tensiones, corrientes e información de estado de los equipos primarios ubicados en el patio de una subestación. Los puntos más importantes del Bus de Proceso están desarrollados en los capítulos 8-1, 9-1 y 9-2 del estándar.
4.4.2 Mensajes en IEC61850
Capítulo 4
Estándar
IEC
61850
30
4.4.2.1 Mensajes GOOSE
En el punto 8-1 del estándar se tratan los mensajes críticos para funciones de protección llamados GOOSE. Los mensajes GOOSE son un servicio que define el estándar que está destinado a las comunicaciones entre equipos para señales que requieran alta velocidad, como por ejemplo disparos, arranques o bloqueos.
Los mensajes GOOSE se encargan de transmitir paquetes de datos que contienen los nodos lógicos. La información de estos paquetes no es enviada solamente cuando se produce un cambio de estado, sino que se transmite repetidamente y sin ser confirmada por el extremo receptor.
Los mensajes GOOSE tienen las siguientes habilidades:
Envían datos digitales y valores analógicos en tiempos del orden de 4 ms.
Contienen un indicador de prioridad dentro del mensaje para optimizar los tiempos de comunicación.
Los mensajes no tienen confirmación, se asegura la recepción a través de una estrategia de comunicación repetitiva. Asimismo la pérdida de sólo un mensaje no es crítica.
La pérdida del canal de comunicación, es decir que se deje de recibir determinado GOOSE, puede ser detectada por el receptor y actuar en consecuencia. Es decir que se puede prever la simple contingencia de comunicaciones.
Incluyen un bit de prueba que identifica si el mensaje es real o de prueba (test bits) para facilitar los ensayos y mantenimiento.
4.4.2.2 Valores Muestreados
El estándar define un tipo de mensajes para la transmisión de valores instantáneos analógicos (por ejemplo, tensiones y corrientes) en tiempo real para un sistema de potencia. Estos datos son llamados valores muestreados y son tratados en los puntos 9-1 y 9-2 del estándar.
Capítulo 4
Estándar
IEC
61850
31
El estándar no se centra en el método de medición sino que describe la forma de ordenar y transmitir esa información a través de una MU.
Los valores muestreados son quizás el punto más significativo del Bus de Proceso dado que permite obtener las mediciones de los transformadores de tensión y corriente en tiempo real en forma remota a través de un sistema de comunicaciones, sin necesidad de utilizar cobre en ningún eslabón de toda esa cadena.
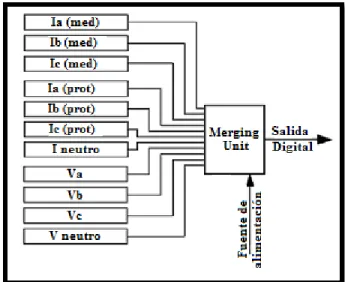
4.4.3 Merging Unit
El estándar define un dispositivo llamado Merging Unit que será el encargado de convertir las señales de tensión y de corriente, la información de estado de los equipos primarios y los comandos de los mismos y transformarlas en paquetes de comunicación según el protocolo que establece la IEC61850. Este aparato representa la interfaz entre el mundo eléctrico y el de las comunicaciones.
A través de las MU´s, cualquier DEI puede obtener múltiples datos de los distintos equipos primarios. En este momento, hay un acuerdo de implementación que define una velocidad de muestreo “base” de 80 muestras por ciclo para protección y monitoreo y otra “alta” con una tasa de 256 muestras por ciclo para aplicaciones de alta frecuencia como calidad de la energía y oscilografías de alta resolución.
La definición de las MU´s surge como un paso previo y necesario para poder lograr la implementación del Bus de Proceso para los equipos de potencia que se tienen actualmente en el mercado. En un futuro no muy lejano se espera que los propios aparatos primarios se puedan conectar directamente al Bus de Proceso.
Capítulo 4
Estándar
IEC
61850
32
Figura 4. 4 Concepto de Merging Unit
4.4.4 Arquitecturas del Bus de Proceso
El bus de comunicación puede ser implementado de diferentes maneras, dependiendo de los requerimientos del flujo de datos, de la confiabilidad o de los requerimientos prácticos de la instalación. Citamos dos alternativas para estructuras de comunicaciones del Bus de Proceso: una topología punto a punto, en la que no existe red de comunicaciones, y otra topología punto a multipunto, basada en una red de comunicaciones.
En las conexiones punto a punto, los DEI’s de control y protección tienen una conexión directa con todos y cada una de las MU’s cuyos datos requieren. Esta topología implica, tal como se muestra en la figura 4.5, que los DEI’s tengan tantas interfaces de comunicación punto a punto como conexiones sea necesario establecer con las MU´s. Del mismo modo, las MU’s necesitan disponer de tantas interfaces de comunicación como conexiones tengan que establecer para dar servicio a los distintos DEI’s de protección y control.
Capítulo 4
Estándar
IEC
61850
33
Figura 4. 5 Bus de Proceso basado en una topología punto a punto.
En las conexiones punto a multipunto los DEI’s de control y protección se conectan a una red de comunicaciones, a la que, a su vez, se conectan las distintas MU’s. En este tipo de conexiones, un emisor escribe información para múltiples receptores.
La topología representada en la figura 4.6 presenta redundancia en el Bus de Proceso, esto es, todos los equipos se conectan a través de dos redes independientes (dos switches Ethernet NO conectados entre sí).
Capítulo 4
Estándar
IEC
61850
34
Figura 4. 6 Bus de Proceso basado en una topología punto a multipunto.
La solución de redundancia es muy atractiva ya que los tiempos de recuperación ante fallas unitarios de la red son nulos. La base de funcionamiento de este protocolo se representa en la figura 4.7. Una MU envía, a través de dos redes Ethernet no conectadas entre sí (principal y respaldo), la misma información. El DEI de protección recibe las dos informaciones, y descarta una de ellas. De este modo, en el caso que hubiera cualquier tipo de problema en una de las dos redes Ethernet, el dispositivo de protección seguiría recibiendo la información, y lo que es más importante, el tiempo de recuperación ante fallas de red es cero. También vale la pena resaltar que el DEI de protección en todo momento conoce el estado de ambas redes de comunicaciones, pudiendo notificar alarmas en el caso de detectar una falla de red.
Figura 4. 7 Envío simultáneo de información por dos redes independientes
Capítulo 4
Estándar
IEC
61850
35
4.4.4.1 Comparación de ambas arquitecturas
¿Qué topología es la más adecuada? Para tratar de responder a esta pregunta trataremos de resaltar los puntos fuertes y débiles de cada una de ellas en lo referente a los aspectos que influyen en el rendimiento y despliegue del bus de proceso.
4.4.4.1.1 Escabilidad
Vamos a tratar de ilustrar el concepto de escalabilidad con un ejemplo (por centrarnos en el problema de la escalabilidad, supondremos que no es necesario ningún tipo de redundancia).
Imaginemos que la implementación de un bus de proceso consta de 2 DEI’s que reciben información de 4 MU’s. Una topología punto a punto requiere que, al menos, las MU’s dispongan de dos interfaces de comunicaciones y que los DEI’s tengan 4 interfaces de comunicaciones, siendo el número total de fibras ópticas requeridas 8 ó 16, dependiendo de que sea posible transmitir y recibir información por una misma fibra, o se dedique una fibra óptica a la transmisión de información y una segunda fibra óptica a la recepción de información.
Una topología punto a multipunto se resolvería con la ayuda de un Switch Ethernet. Dicho Switch debería disponer de, al menos, cuatro puertos para comunicarse con las cuatro MUs, y dos puertos para comunicarse con los DEI’s.
En el caso que se requiera modificar la instalación para añadir, por ejemplo, tres TCs no convencionales, manteniendo las cuatro MU’s, ¿Cómo nos podemos adecuar a la nueva situación?
Capítulo 4
Estándar
IEC
61850
36
La escalabilidad, por tanto, es un factor limitativo para una topología punto a punto, dado que los DEI’s y las MU’s diseñados para la misma dispondrán de un número máximo de interfaces de comunicaciones.
4.4.4.1.2 Sincronización
El objetivo principal de la sincronización, es sincronizar las muestras (estampa de tiempo) de las formas de onda provenientes de las MU’s. Por lo tanto, la sincronización desempeña un papel muy importante en la implementación del bus de proceso, ya que influye en la operación correcta o incorrecta de un esquema de protección, control o medición. Por ejemplo, en un esquema de protección diferencial de barra, el relevador debe estar suscrito a la información proveniente de las MU’s de todas las bahías que conforman el esquema y obtener en el mismo instante de tiempo los valores (SV), ya que si existe una diferencia de tiempo en las muestras recibidas en el relevador, provocaría en el cálculo del algoritmo diferencial de barra del dispositivo, una corriente diferencial, la cual, si esta por arriba del valor ajustado, provocaría un disparo incorrecto, ocasionado por la falta de sincronización.
La sincronización del bus de proceso, para una topología punto a multipunto, se puede realizar mediante un GPS, utilizando una señal IRIG-B. Para poder realizar una conexión punto a multipunto, se tendría que utilizar una red (Ethernet a través de un switch), la cual debe de estar sincronizada junto con los relevadores y las MU’s; para que cuando los relevadores se suscriban a la información contenida en las MU’s, ésta sea adquirida en el mismo instante de tiempo (estampa de tiempo), ya que si esto no se llevara a cabo, como se menciono anteriormente, podría provocar una operación incorrecta del sistema de protección, control o medición.
Capítulo 4
Estándar
IEC
61850
37
La solución de General Electric al bus de proceso que marca el estándar IEC61850 (SHF), es una arquitectura punto a punto. En dicha arquitectura, el encargado de realizar la sincronización de los Bricks, es el CPU de cada relevador, por lo cual, para esta arquitectura no se necesita ningún equipo externo que sincronice la información publicada por los Bricks.
4.4.4.1.3 Costo
La comparación del factor costo entre ambas topologías es complicada. No obstante, sí parece evidente que existen unos costos adicionales dependiendo de la topología seleccionada, así, para una topología punto a punto, podemos esperar DEI’s y MU’s de mayor costo, dado que requieren un número de interfaces de comunicaciones superior al requerido por una topología punto a multipunto. También, para la topología punto a punto, el número de fibras ópticas requeridas es mayor. El costo de la topología punto a multipunto viene dado por el equipamiento de red de comunicaciones requerido.
4.4.5 Implementación del Bus de Proceso
Hay aspectos que hacen del estándar IEC61850 un paso de especial importancia en el proceso de digitalización de las instalaciones eléctricas. Uno de ellos es, por supuesto, la normalización de la información de configuración de los equipos que constituyen un sistema integrado, para lo que se han definido formatos y sistemas de intercambio de datos entre equipos.
Sin embargo, desde el punto de vista del intercambio de información operativa y de tiempo real, el aporte más significativo es la inclusión del muestreo de las magnitudes analógicas dentro del ámbito del estándar.
Capítulo 4
Estándar
IEC
61850
38
Personas: La tecnología debe posibilitar el cambio y la innovación, pero las personas han de querer que el cambio se produzca. Cabe esperar, como en cualquier proceso de cambio, una cierta resistencia que, en parte, se debe simplemente al miedo al cambio. Es responsabilidad de la comunidad tecnológica y empresarial crear las condiciones para neutralizar esta situación atacando las raíces del problema.
En primer lugar, es necesario contar con personas con una formación adecuada. Es necesario, entonces, establecer programas de capacitación que conviertan el nuevo paisaje en terreno familiar y conocido. Esta formación deberá adaptarse a la etapa, dentro del proceso del diseño y/u operación en que el técnico deba desenvolverse: diseño de redes de comunicación, ingeniería de subestación, configuración y programación de equipos, mantenimiento de los diferentes componentes del sistema, etc.
En segundo lugar hace falta desarrollar un conjunto de herramientas que permitan trabajar en el nuevo entorno con la misma facilidad que en el anterior. Ya empiezan a resultar lejanos los tiempos en que un plano de papel, un multímetro, un destornillador y un pelacables eran las herramientas adecuadas para moverse en una subestación. No cabe duda de que las instalaciones eléctricas se convierten, en virtud de la tecnología, en un lugar más abstracto y distante a la experiencia directa.
Por ello los suministradores de equipos y servicios deberán desarrollar dispositivos y programas de software que ofrezcan a los ingenieros un ambiente de trabajo enfocado a su conocimiento específico, aquel en el que generan valor y se sienten cómodos, y que, a la vez, les permitan aprovechar al máximo las oportunidades de las nuevas tecnologías.
Capítulo 5
Sistema
HardFiber
39
CAPÍTULO 5
Sistema HardFiber
5.1 Descripción general
El SHF es una solución basada en el estándar IEC61850 y está orientada a aplicaciones en subestaciones eléctricas de alta tensión.
Este sistema establece la conexión entre los equipos primarios y los DEI’s ubicados en la caseta de control a través de una comunicación segura y un protocolo abierto, con una configuración punto a punto.
Con el uso de las fibras ópticas como medio de comunicación, los dispositivos de control y protección adquieren la información de los equipos primarios eliminando así una gran cantidad de conductores de cobre.
Al estar desarrollado según el estándar IEC 61850 está preparado para trabajar con DEI’s de cualquier fabricante.
La siguiente figura ilustra los componentes fundamentales de SHF en una aplicación típica.
Capítulo 5
Sistema
HardFiber
40
A continuación se muestra un listado de los componentes que van desde el patio de la subestación hasta la caseta de control:
Cables de cobre
Cables de fibra a la intemperie
Cables de fibra al interior
Bricks
Administrador de fibras
Tarjeta de Proceso
Los cables de cobre son utilizados para unir las cajas de los equipos primarios y los Bricks. Estos cables transportan señales analógicas y digitales de los equipos primarios, como son los transformadores de corriente y potencial, interruptores, seccionadores, etc.
Los cables de fibra a la intemperie realizan el enlace óptico entre los Bricks y el Administrador de fibras. Poseen 4 fibras ópticas en su interior para cada núcleo del Brick, además de conductores de cobre para la alimentación de los Bricks.
Los cables de fibra al interior hacen el enlace óptico entre los Administradores de fibras y los puertos de los relés.
Los Bricks son equipos electrónicos que convierten las señales analógicas y digitales de los equipos primarios en señales ópticas digitales, por otra parte hacen este mismo proceso a la inversa, es decir, convierten las señales ópticas en señales eléctricas para los disparos de los interruptores. Los Bricks poseen cuatro núcleos independientes, lo cual permite que se puedan comunicar con 4 DEI’s.
Capítulo 5
Sistema
HardFiber
41
Por último está la Tarjeta de Proceso, la cual se encarga de convertir y traducir las señales ópticas provenientes de los Bricks para que puedan ser interpretadas por los relés.
Figura 5. 2 Sistema HardFiber
5.2 Brick
El Brick es el elemento principal del SHF. Este dispositivo es lo que el estándar IEC 61850 denomina como MU. Tiene como función la adquisición de las señales analógicas de los equipos primarios y la digitalización de las mismas, después estas señales son enviadas por las fibras ópticas con una tecnología punto a punto hacia los equipos de control y protección. Digitaliza las señales de tensión y corriente de los transformadores de instrumento y las señales digitales de los equipos de maniobra, y las convierte a un lenguaje universal que propone el estándar.
Capítulo 5
Sistema
HardFiber
42
El cableado de este dispositivo es a través de conductores estandarizados, lo cual facilita el montaje y su mantenimiento.
No hace falta ninguna configuración del equipo ya que el sistema es reconocido como una unidad de entradas y salidas remota de los DEI’s, con lo cual se configura completamente en los relés vinculados a ellos. Las entradas y salidas son similares a las de un DEI convencional.
Es un equipo completamente apto para instalarse a la intemperie ya que tiene un índice de protección IP66 y un amplio rango de temperaturas desde -40° hasta 70° C.
Existen 4 tipos de Brick, según su tipo de entradas de CA.
Tabla 5. 1 Tipos de Brick según sus entradas de CA.
Modelo
Tipos de Brick Entradas y Salidas
Conector D Conector C Conector B
Corrientes CA Tensiones CA
Entradas CD
Contactos de entrada
Contactos de salida
1A 5A SSR Sellado Tipo C
BRICK-4-HI-CC11 8 --- --- 3 18 4 1 2
BRICK-4-HI-CC55 --- 8 --- 3 18 4 1 2
BRICK-4-HI-CV10 4 --- 4 3 18 4 1 2
Capítulo 5
Sistema
HardFiber
43
5.2.1 Funcionamiento interno
Internamente el Brick está compuesto por un núcleo analógico, 4 núcleos digitales y una fuente de alimentación.
Figura 5. 4 Diagrama interno del Brick.
El núcleo analógico se encarga de intercambiar información con las entradas y salidas del Brick. En el caso de las entradas, su función es convertir las señales analógicas en señales digitales, según el estándar IEC61850 y enviar copias independientes de todas las señales digitales muestreadas a cada uno de los núcleos digitales, a través de vínculos de datos digitales independientes. En el caso de los contactos de salida del Brick, realiza el proceso inverso.
Los núcleos digitales son los encargados de la transmisión de datos a la caseta de control a través de un vínculo Ethernet en fibra óptica. En la caseta de control, cada núcleo digital se puede conectar a un DEI. Los núcleos digitales son completamente independientes entre ellos. Es así que un Brick se puede conectar con hasta 4 DEI’s, pudiendo estos últimos muestrear a diferentes velocidades, tener diferentes versiones de firmware y hasta ser de fabricantes distintos con diferentes implementaciones de Bus de proceso.
Capítulo 5
Sistema
HardFiber
44
5.2.2 Indicadores LED del Brick
El Brick tiene cinco indicadores LED en la parte frontal, uno para el núcleo analógico y uno para cada núcleo digital, los cuales muestran el estado del Brick. Los LEDs reportan una serie de funciones de auto-monitoreo que detectan prácticamente cualquier problema interno, así como problemas con las señales ópticas recibidas.
Figura 5. 5 Indicadores LED
Un LED verde indica que no se detecta un error en el núcleo correspondiente. El LED del núcleo analógico parpadea cuando el contacto de enclavamiento este abierto. Los LEDs de los núcleos analógicos parpadean cuando se recibe un comando de salida en estado “On”.
Un LED rojo indica que se detecta un error en un núcleo correspondiente. Un LED rojo en el núcleo analógico indica un problema de hardware irrecuperable y es necesaria una reparación de fábrica. En los núcleos digitales, un LED rojo puede indicar una o más de las siguientes condiciones:
1) El núcleo no está recibiendo mensajes de la dirección correcta, pero está recibiendo una señal óptica. Ya sea que el relé no está configurado correctamente para el núcleo o el núcleo está conectado a otro relé.
Capítulo 5
Sistema
HardFiber
45 Tabla 5. 2 Operación de los LED indicadores de estado
Indicador LED Condición del núcleo analógico Condición del núcleo digital
Apagado Apagado Apagado o ninguna señal óptica recibida
Verde Núcleo en buen estado y contacto de enclavamiento cerrado
Núcleo en buen estado y todos los comandos están desactivados Verde parpadeante Núcleo en buen estado y contacto de
enclavamiento abierto
Núcleo en buen estado y por lo menos un comando está activado Rojo Error detectado en el núcleo Error en el núcleo o portador sano
pero tráfico no válido
5.2.3 Velocidad de muestreo
El Brick soporta diversos intervalos de muestreo que van de 10 a 0.1 ms. Estos intervalos pueden ser constantes o variables de un valor al siguiente.
Todas las entradas son muestreadas al mismo tiempo. Esto incluye a las corrientes y tensiones de medición, contactos de entrada y al monitoreo de los contactos de salida.
5.2.4 Entradas de Corriente Alterna
Capítulo 5
Sistema
HardFiber
46
Tabla 5. 3 Especificaciones de las entradas de CA
Entradas de CA
Corrientes Tensiones
Corriente 1 o 5 A Tensión 50.0 a 240V
Frecuencia 20 a 65 Hz Frecuencia 20 a 65 Hz Prestación <0.2 VA Prestación <0.25VA a 120 V
Rango de
conversión 0 a 46 x ln RMS simétrico Rango de conversión 0 a 260 V RMS
Corriente soportada
20 ms 250 ln Tensión soportada (fase-neutro)
Continuo 260 V
1 s 100 ln 1min/hr 420 V
Continuo 3 ln
Exactitud
10<U<50V ±0.5% de lectura
Exactitud
0.1 ln <1<2ln
±0.25% de
lectura 50<U<120V
±0.25% de lectura
1 > 2ln
±0.1% ln ±1.0% de lectura
120<U<208V ±0.5 de lectura
Si se comparan, estos valores tienen las mismas características y valores nominales que un DEI tradicional.
5.2.5 Entradas de Corriente Directa
Las entradas de Corriente Directa se utilizan para mediciones relativamente pequeñas. El equipo posee 3 entradas de esta clase, las cuales se pueden configurar como sigue:
Resistencia sensor de temperatura (RTD) 100Ω de Níquel, 120 Ω de Níquel y 100 Ω de Platino.
Transductores
Miliamperímetro: (DCmA) 0…-1mA, 0…5mA, 0…10mA, 0…20mA o -4…20mA.
Posición Tap: (DCmV) -10…10mV.
Capítulo 5
Sistema
HardFiber
47
Los valores se actualizan a la velocidad de muestreo.
Figura 5. 6 Opciones de conexión de las entradas de corriente directa.
5.2.6 Contactos de entrada
El Brick tiene 18 contactos de entrada, todas ellos se utilizan para obtener estados de equipos, señalizaciones, alarmas, bloqueos, etc. Todos los contactos poseen una tensión de exploración en 24Vcc, generada por el mismo Brick.
Capítulo 5
Sistema
HardFiber
48
Figura 5. 7 Bricks conectados en paralelo.
5.2.7 Contactos de salida
Existen tres tipos de contactos de salida:
5.2.7.1 De estado sólido
Cada Brick cuenta con 4 contactos de salida de estado sólido (contactos SSR), estos están diseñados para actuar directamente con las bobinas que activan el disparo y cierre de los interruptores o seccionadores debido a que son capaces de interrumpir corrientes muy altas. Además, poseen monitores de tensión y de corriente. Los primeros se pueden utilizar para la supervisión del circuito de disparo, y los segundos para verificar la presencia de corriente durante la operación de un disparo y monitorear el instante de apertura del contacto auxiliar del interruptor usualmente en serie con la bobina de disparo.
Capítulo 5
Sistema
HardFiber
49
Figura 5. 8 Contactos de salida del Brick.
5.2.7.2 Tipo C
El equipo cuenta con 2 contactos tipo C. La energización de los contactos y la seguridad de las órdenes son iguales que para las salidas de estado sólido.
5.2.7.3 Contacto Sellado
Estos contactos están diseñados para aquellas aplicaciones donde el contacto no debe cambiar de posición excepto por una orden explícita. Cada Brick posee un contacto de estas características.
Capítulo 5
Sistema
HardFiber
50
5.2.8 Dimensiones del Brick
El chasis del Brick es una caja de aluminio fundido. Las dimensiones se muestran en la siguiente figura:
Capítulo 5
Sistema
HardFiber
51
5.2.9 Alambrado del Brick
Los diagramas de alambrado para los cuatro tipos de Brick se muestran en las siguientes figuras:
Capítulo 5
Sistema
HardFiber
52
Capítulo 5
Sistema
HardFiber
53
Capítulo 5
Sistema
HardFiber
54
Capítulo 5
Sistema
HardFiber
55
5.3 Cables
Existen 3 clases de cables que integran al Sistema HardFiber. Para todos los casos, los cables son prefabricados, de manera que se piden a fábrica en función de la longitud de tendido que se requiera.
5.3.1 Cables de cobre
Estos cables son los realizan el vínculo entre los equipos primarios y el Brick. El extremo que se conecta al Brick posee un conector normalizado.
Existen tres tipos de estos cables según el tipo de función: uno para los contactos de salida, otro para los contactos de entrada y de corriente directa y un tercero para las entradas de corriente alterna.
Se piden a fábrica según la longitud necesaria.
Capítulo 5
Sistema
HardFiber
56
5.3.2 Cables de fibra a la intemperie
El vínculo entre el Brick y los Administradores de fibras es realizado a través de los cables de fibra a la intemperie, los cuales poseen 4 fibras ópticas (1 para cada núcleo) y 2 conductores de cobre AWG16 para la alimentación del Brick. Para tener mayor rigidez cuenta con un conductor central de acero. Las longitudes oscilan entre 1 y 1500 metros.
Figura 5. 15 Sección transversal del cable de fibra a la intemperie.
Figura 5. 16 Terminal del cable de fibra a la intemperie que se conecta al Administrador de fibras
Capítulo 5
Sistema
HardFiber
57
5.3.3 Cables de fibra al interior
Realizan la interconexión entre los Administradores de fibras y los DEI’s. Estos cables cuentan con 4 fibras ópticas Multimodo 50/125 μm y no poseen conductores eléctricos.
Figura 5. 17 Sección transversal del cable de fibra al interior.
Figura 5. 18 Terminales de FO del cable de fibra al interior conectadas al DEI.
5.4 Administrador de Fibras
Capítulo 5
Sistema
HardFiber
58
los relés con los Bricks. Se pueden acometer hasta 16 cables de fibra (a la intemperie o al interior).
Figura 5. 19 Administrador de fibras.