ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
EL METODO DEL ELEMENTO
FINITO EN EL ANALISIS MODAL
DE SISTEMAS ACUSTICOS
ESTRUCTURALES ACOPLADOS
TESIS
QUE PARA OBTENER EL GRADO DE DOCTOR EN CIENCIAS
CON ESPECIALIDAD EN INGENIERÍA MECÁNICA
PRESENTA
M. en C. HECTOR ENRIQUE MERODIO VALENCIA
DIRECTOR: DR. JOSE ANGEL ORTEGA HERRERA.
MODAL DE SISTEMAS ACÚSTICOS ESTRUCTURALES
ACOPLADOS
RESUMEN
Este trabajo consiste en realizar un análisis de los modos de vibración acústica, en un recinto acústico acoplado el cual representa una cabina de automóvil con el fin de determinar las frecuencias naturales del sistema, necesarios para optimizar el diseño de las mismas predicciones del ruido y su control.
Este análisis modal se reduce al análisis de una cámara cúbica con orificios simulando las puertas y ventanas de la cabina automovilística. Para cual se desarrolla el modelo matemático analítico reducido matricialmente y resuelto mediante el método del elemento finito (MEF), además aprovechando el modelo matricial obtenido se implemento el paquete computacional MATLAB determinando la solución por esta via y comparándola con la obtenida por el MEF. Esto con el fin de comprobar que el modelo matemático matricial obtenido es el correcto para resolver la ecuación diferencial de Helmholtz del Sistema Acústico Estructural Acoplado libre resultante.
ABSTRAC.
This work consists of making an analysis of the acoustic vibration modes, in a connected acoustic enclosure which represents a cabin of automobile with the purpose of determining the natural frequencies of the system, necessary to optimise the design of the same predictions of the noise and its control.
This modal analysis is reduced to the analysis of a cubical camera with orifices simulating the doors and windows of the automobile cabin. For the analytical mathematical model reduced matrix and solved by means of the method of the finite element is developed (FEM), in addition taking advantage of the obtained matrix model Its implemented computacional package MATLAB determining the solution by this way and comparing it with the obtained one by the FEM. This with the purpose of verifying that the obtained matrix mathematical model is the correct one to solve the equation differential of Helmholtz of the Acoustic System Structural resulting free Connection.
INTRODUCCIÓN.
requieren bajos niveles de vibración para una operación suave y silenciosa de máquinas y estructuras y en general, de todo sistema dinámico. Esto es altamente deseable por lo que se trabaja fuertemente en ello ya que incrementa la percepción de calidad y valor, así que es esencial que las causas, efectos y el control de la vibración de los sistemas de ingeniería sean comprendidos con claridad; con la finalidad de que un análisis adecuado, modificación o diseño pueda ser realizado. Esto es, la demanda actual a estos sistemas es tan severa, que el análisis y evaluación del comportamiento dinámico es hoy en día parte importante y esencial del diseño. El análisis dinámico se realiza para conocer y/o predecir la respuesta a una excitación particular y con ello realizar las modificaciones requeridas. Esto es necesario para controlar ciertos parámetros de la respuesta dinámica tales como niveles de vibración, esfuerzos, fatiga, ruido y resonancia.
Los fabricantes del sector automotriz se enfrentan con un fuerte requerimiento de desarrollar vehículos de alta calidad en un pequeño periodo de tiempo. Ahora bien; como el ruido interior tiene un fuerte efecto sobre la venta del vehículo, es importante tener la capacidad de poder estimar el nivel del ruido con suficiente exactitud por medio de simulación en la etapa del diseño. Tal necesidad ha iniciado una extensa investigación en las técnicas de simulación [1].
Sin embargo a pesar de los esfuerzos puestos en los modelos numéricos y computacionales, todavía existen algunas diferencias entre los resultados numéricos y experimentales. Varios problemas de ruido pueden ocurrir cuando la frecuencia de excitación está cercana a la frecuencia natural acústica y estructural (resonancia). En el problema de ruido interior de un vehículo, es muy difícil calcular los modos estructurales con precisión, pero comparativamente fácil al determinar con éxito los datos modales acústicos a través del análisis del elemento finito [2].
ANTECEDENTES
El diseño mecánico en la industria automotriz ha sido abordado muy escuetamente en las carreras tradicionales de la industria automovilística, sobre todo al diseño del
habitáculo o cabina de los pasajeros, normalmente los fabricantes de automóviles, diseñan las carrocerías probándolas experimentalmente en los sitios mediante cámaras acústicas, plataformas vibratorias y oscilantes donde ponen a prueba el vehículo sujeto a todo tipo de movimientos y sacudidas con el fin de comprobar los sistemas de la suspensión, vibración estructural, esfuerzos bajo operaciones criticas con carga, inclinaciones con pendientes considerables olvidando las fuentes internas que pueden provocar ruido o sonido en el peor de los casos, como el ir conversando mutuamente dentro del habitáculo, con la radio encendida, el ruido del motor y del sistema propio, haciendo que algunas veces el viaje sea demasiado incomodo, debido a que el ruido o el sonido es transmitido por todo conducto que le sea aprobado para ello. Esta es la razón principal de hacer un análisis modal acústica de lo anterior de la cabina, un sistema estructural acústico acoplado con discontinuidades como son las hendiduras, puertas y ventanas normales del diseño automovilístico
plazas, restaurantes o centros comerciales, oficinas publicas terminales de embarque o desembarque áreas donde se presentan situaciones criticas audibles que imposibilitan el poder comunicarse de una manera normal. Esto debido principalmente a que el aspecto acústico de edificio no fue tomado en cuenta apropiadamente. Esto hace que al ser diseñada y realizada cualquier obra, casa, edificio o construcción donde el habitáculo haya una necesidad de comunicarse verbalmente sea tomado en cuenta el diseño acústico arquitectural de la obra.
JUSTIFICACION
Este trabajo se realizo tomando en cuenta la necesidad de realizar un estudio o análisis acústico arquitectural en el diseño de un habitáculo en la rama de la industria automovilística (cabina de automóvil) con el fin de contribuir a esta industria con el análisis modal patrón en el diseño arquitectural de una cabina de automóvil, análisis reducido al análisis de un habitáculo patrón (Cubo) con discontinuidades (hendiduras, puertas y ventanas) cuyo análisis puede ser garantizado a la forma y tamaño real de la cabina del automóvil.
OBJETIVOS
a) Contribuir con el modelado matemático para el análisis modal de una cámara acústica estructural acoplada que simule el habitáculo de una cabina de automóvil real para poder determinar los niveles de ruido en ella ya así poder controlarlo por rediseño o de la consideración de materiales aislantes propios para ello.
El autor agradece al Consejo Nacional de Ciencia y Tecnología
(CONACYT), por el otorgamiento de una beca nacional de Posgrado,
para realizar los estudios de maestría.
A la Escuela Superior de Ingeniería Mecánica y Eléctrica del Instituto
Politécnico Nacional Sección de Estudios de Posgrado e Investigación
(ESIME - Zacatenco) por permitirme realizar mis estudios de posgrado.
Agradezco de manera muy especial al Dr. José Angel Ortega Herrera,
director de esta tesis, por su apoyo y asesoría en la realización de la
misma.
A los sinodales, al Dr. Fermin Viniegra Heberlin, Dr. Samuel Alcántara
Montes, Dr. Manuel González Hernández, Dr. Valery R. Nossov, Dr.
Rafael Sánchez López, que con sus valiosas sugerencias contribuyeron
a que se culminara exitosamente este trabajo.
A la planta profesional de profesores de la Escuela Superior de
Ingeniería Mecánica y Eléctrica del Instituto Politécnico Nacional
Sección de Estudios de Posgrado e Investigación (ESIME - Zacatenco),
por su apoyo incondicional y desinteresado.
A todas aquellas personas que de alguna forma u otra influyeron para la
realización del presente trabajo.
A ese ser que me ha permitido disfrutar de todas las cosas maravillosas
que ofrece la vida.
Con todo el cariño, respeto y admiración, a quienes siempre velaron por mí y han deseado lo mejor para sus hijos.
Mis Padres:
David Merodio Macias y Candelaria Valencia Calcáneo
A quienes siempre me han apoyado incondicionalmente:Mi Esposa:
Mildren de los Santos Torres Oropeza
Mis Hermanos:Mario Arturo Merodio Cuevas
Josué David Merodio Valencia
Mis Sobrinos:
Pamela y Emiliano Caled Merodio Meléndez
David Shemeling, Héctor Enrique
y Josué Antonio Merodio Chávez
Para ustedes con todo cariño.
A esa persona que siempre me ha sabido aconsejar y me a colocado por la senda del buen camino con mucho cariño para usted:
Sra. Isabel Sánchez Zamora
A todos los compañeros del posgrado por todos esos momentos agradables que pasamos juntos y que nunca se olvidaran.
Un agradecimiento muy especial, por todas las atenciones que tuvo hacia mi persona. A la señora:
Sra. Josefina Sánchez Benítez
A mis amigos que me han brindado su valiosa amistad desde hace mas de diez años.
Mariana Naheli Rosas Guzmán, Mariana Reynoso Villegas, Raúl Esteban Farias Huerta, Jorge Luis Bolívar Arévalo, Melitón Rangel Espinosa, Rubén Manuel Hernández Morales, Pedro Arias Moguel, Alejandro Romero Rodríguez, Marco Antonio García Pérez, Víctor Hugo Mina Calderón, Rodrigo Mina Calderón, J. Arturo Roché Hernández, David Fernando Carrera Lanestosa, Roberto Busquet León, Arquímedes Ortiz Rivera.
ÍNDICE
CAPÍTULO I
ESTADO DEL ARTE... 1
1.1 Vibraciones y Ondas... 2
1.2. Potencia del Sonido... 2
1.3. Propagación del Sonido en el Aire... 3
1.4. Efecto del Viento... 3
1.5. Reflexión... 3
1.6. Escalas para el Ruido... 4
1.7. Características de las Señales de Ruido... 6
1.8. Análisis de Estructuras... 9
1.9. Puntos débiles de las carrocerías... 9
1.10. Razones de transmisión del ruido al habitáculo... 10
1.11. Formulación del Problema... 10
CAPITULO II FORMULACION VARIACIONAL DEL MEF EN ACUSTICA... 12
2.1 La Ecuación de la Onda Unidimensional... 12
2.2 La Formulación Variacional Lagrangiana y el Método del Elemento Finito... 19
2.3. Vibración Acústica... 32
CAPÍTULO III FORMULACION VARIACIONAL DEL MEF EN PLACAS... 36
3.1. Introducción... 36
3.2. Teoría de Placas... 36
3.3. Vibración de placas... 36
3.4. Método del Elemento Finito Aplicado a Placas... 44
3.5. Estructuras Formadas de Elementos Placa... 49
CAPÍTULO IV SENSIBILIDAD DE LOS SISTEMAS ACUSTICOS ACOPLADOS... 56
4.1 Introducción... 56
4.2 Problema de Vectores Característicos... 57
4.2 Análisis de Sensibilidad Modal... 61
CAPÍTULO V ANÁLISIS MODAL DE SISTEMAS ACUSTICOS Y ESTRUCTURALES... 63
5.1. Introducción... 63
5.2. Conectividad... 63
5.3. Análisis Estructural... 64
CAPÍTULO VI
ANÁLISIS MODAL DE SISTEMAS ACÚSTICOS - ESTRUCTURALES
ACOPLADOS... 75
6.1 Introducción... 75
6.2. Construcción del Modelo Estructural... 77
6.3. Condiciones de Frontera... 80
6.4. Solución... 82
6.5. Análisis Acústico... 82
6.6. Construcción del Modelo... 83
6.7. Análisis Modal... 85
6.8. Tipos de Post-Proceso... 88
6.9. Análisis Estructural... 89
6.10. Análisis Acústico... 97
6.11 Análisis Acoplado ... 102
ÍNDICE DE FIGURAS
Fig.1.1 Movimiento de una partícula durante un ciclo (Acoustic Noise Measurements,
Quinta edición) ... 2
Fig.1.2 Reflexión de una onda sobre una superficie plana (Acoustic Noise Measurements, Quinta edición) ... 4
Fig.1.3 Niveles de presión de sonido típico de fuentes de sonidos común (Acoustic Noise Measurements, Quinta edición) ... 6
Fig.1.4 Salida de Potencia del Sonido de alguna fuente de sonido típica (Acoustic Noise Measurements, Quinta edición) ... 7
Fig.1.5 Señal Sinosoidal mostrando varias medidas de amplitud (Acoustic Noise Measurements, Quinta edición) ... 8
Fig.1.6 Señales del sonido y sus espectros (Acoustic Noise Measurements, Quinta edición)... 9
Fig.2.1 Sistema acoplado de resortes, mostrando la posición de equilibrio y el sistema desplazado... 12
Fig.2.2 Sistema de resortes mostrando puntos de tensión y compresión... 14
Fig.2.3 Barra prismática susceptible de vibraciones axiales... 19
Fig.2.4 Representación con elementos finitos... 19
Fig.2.5 Representación de un elemento con sus nodos... 19
Fig.2.6 Cuerpo con geometría no lineal... 25
Fig.2.7 Modelo con elementos finitos... 25
Fig.2.8 Aproximación geométrica para elementos finitos... 26
Fig.2.9 Elemento finito mostrando los nodos i, j... 28
Fig.2.10... 28
Fig.2.11 Elemento hexaédrico (Elemento Finito en Ingeniería, Chandrupatlan y Belegundu, 1999) ... 33
Fig.3.1 Fuerzas, Momentos y Esfuerzos Actuando en la Placa... 38
Fig.3.3 Elemento Rectangular con tres grados de libertad en cada nodo (Principles and
Techniques of Vibrations, Prentice Hall, Primera edición)... 44
Fig.3.4 Triángulo de Pascal ... 45
Fig.5.1 Esquema de numeración con dos elementos rectangulares ... 64
Fig.5.2 Esquema de numeración de las seis placas que forman el campo estructural... 65
Fig.5.3 Esquema de numeración del elemento seleccionado para obtener las graficas desplazamiento contra frecuencia del campo estructural... 72
Fig.5.4 Graficas Desplazamiento contra Frecuencias del Nodo 2... 73
Fig.5.5 Esquema de numeración del elemento seleccionado para obtener las graficas de presión contra frecuencia del campo acústico... 74
Fig.6.1 Bloque... 75
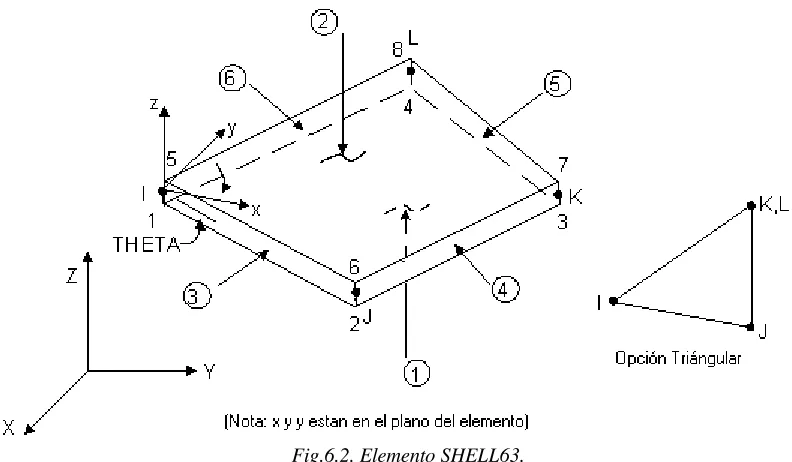
Fig.6.2 Elemento SHELL63... 76
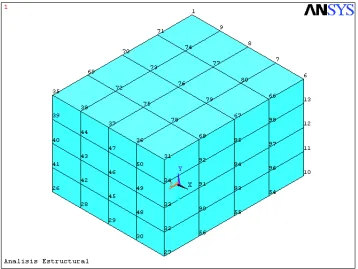
Fig.6.3 Modelo Estructural, que consta de 96 elementos sólidos y 98 nodos... 77
Fig.6.4 Aplicación de las Condiciones de Frontera (Restricción de movimiento en las cuatro esquinas inferiores)... 79
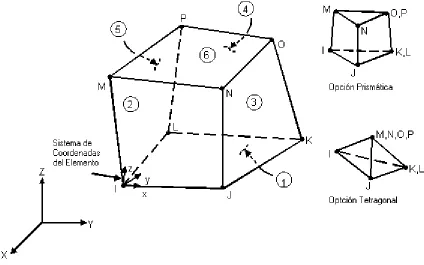
Fig.6.5 Elemento FLUID30 3-D... 80
Fig.6.6 Modelo Acústico, Compuesto de 64 Elementos y 125 nodos ... 81
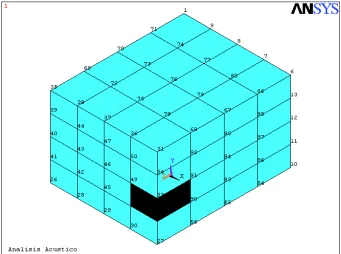
Fig.6.7 Modelo Acústico-Estructural acoplado compuesto de 256 elementos y 223 nodos... 81
Fig.6.8 Primer modo de vibración del campo estructural... 84
Fig.6.9 segundo, tercero y cuarto modo de vibración del campo estructural... 86
Fig.6.10 Elementos Estructurales seleccionados (elementos sombreados en la fig.6.4) para obtener las gráficas de las funciones de forma de Desplazamiento & Frecuencia... 87
Fig.6.11 Graficas Desplazamiento contra Frecuencias del Nodo 32 (UX y ROTX)... 88
Fig.6.12 Graficas Desplazamiento contra Frecuencias del Nodo 76 (UX y ROTX)... 89
Fig.6.13 Modelo Estructural fijado en las fronteras de su placa inferior... 90
Fig.6.14 Primer modo de vibración para las nuevas condiciones de frontera... 91
Fig.6.15 Primeros cuatro modos de vibración del campo acústico... 93
Fig.6.16 Elemento Acústico seleccionado para obtener las graficas de Presión & Frecuencia... 94
Fig.6.18 Primer modo de vibración del campo acústico-estructural... 97 Fig.6.19 segundo, tercero y cuarto modo de vibración del campo acústico-estructural
acoplado... 98 Fig.6.20 Modelo Acústico-Estructural fijado en la frontera de su placa inferior...100 Fig.6.21 Modo de vibración del campo Acústico-Estructural para la frecuencia de 6.419 Hz...102 Fig.6.22 Modo de vibración del campo Acústico-Estructural para la frecuencia de 10.272 Hz...102 Fig.6.23 Segundo modo de Vibración del campo Acústico-Estructural con nuevas
dimensiones...103 Fig.6.24 Segundo modo de Vibración del campo Acústico-Estructural con nuevas
ÍNDICE DE TABLAS
SIMBOLOGÍA.
Símbolo Nombre
DBEB Rigidez Flexionante. D Dominio
w Desplazamiento transversal
uBiB Desplazamiento en la dirección de X. vBiB Desplazamiento en la dirección de Y. wBiB Desplazamiento en la dirección de Z. θBξB Rotación en la dirección de X. θBηB Rotación en la dirección de Y. θBζB Rotación en la dirección de Z.
ξ Coordenada isoparametrica en la dirección de X. η Coordenada isoparametrica en la dirección de Y. ζ Coordenada isoparametrica en la dirección de Z. E Módulo de Young.
υ Razón de Poisson.
∇ Gradiente ⎟⎟
⎠ ⎞ ⎜⎜
⎝ ⎛
∂ ∂ ∂
∂ ∂
∂
z y x
KP
e
P Matriz de rigidez campo estructural. MP
e
P Matriz de masas campo estructural. KP
a
P Matriz de rigidez campo acústico. MP
a
J Jacobiano.
uBeB Vector desplazamiento del modelo estructural del elemento finito. pBaB Vector presión de sonido del modelo acústico del elemento finito.
fBeB Fuerzas externas aplicadas a la estructura. fBaB Fuente de sonido en el campo acústico. MBeeB Matriz de masa estructural.
KBeeB Matriz de rigidez estructural. MBaaB Matriz de masa acústica. KBaaB Matriz de rigidez acústica. MBaeB Matriz de acoplamiento. KBeaB Matriz de acoplamiento.
λ Valor característico.
Ψ Vector característico derecho.
ΛP e
P Matriz diagonal de valores característicos del campo estructural.
ΦBeB Matriz de vectores característicos normalizados del campo estructural.
ΛP a
P Matriz diagonal de valores característicos del campo acústico.
CAPÍTULO I
ESTADO DEL ARTE.
INTRODUCCIÓN.
El alto costo y el dudoso abastecimiento de muchos materiales y otros recursos, junto con los sofisticados métodos de análisis y manufactura ahora disponibles, han dado como resultado la construcción de máquinas y estructuras ligeras y altamente esforzadas, frecuentemente con grandes recursos energéticos, lo cual conduce a problemas severos de vibración. A menudo, estos sistemas dinámicos también operan bajo condiciones ambientales hostiles y con mantenimiento mínimo. Es de esperarse que cada vez más, se demandara de estos sistemas dinámicos, los más altos rendimientos en conjunto con un intercambio en los requerimientos de los parámetros de operación tales como bajos niveles de vibración y emisión de ruido, respuestas controladas de los sistemas y de bajo costo. Por otro lado, es bien conocido que se requieren bajos niveles de vibración para una operación
suave y silenciosa de máquinas y estructuras y en general, de todo sistema dinámico. Esto es altamente deseable por lo que se trabaja fuertemente en ello ya que incrementa la percepción de calidad y valor, así que es esencial que las causas, efectos y el control de la vibración de los sistemas de ingeniería sean comprendidos con claridad; con la finalidad de que un análisis adecuado, modificación o diseño pueda ser realizado. Esto es, la demanda actual a estos sistemas es tan severa, que el análisis y evaluación del comportamiento dinámico es hoy en día parte importante y esencial del diseño. El análisis dinámico se realiza para conocer y/o predecir la respuesta a una excitación particular y con ello realizar las modificaciones requeridas. Esto es necesario para controlar ciertos parámetros de la respuesta dinámica tales como niveles de vibración, esfuerzos, fatiga, ruido y resonancia. Los fabricantes del sector automotriz se enfrentan con un fuerte requerimiento de desarrollar vehículos de alta calidad en un pequeño periodo de tiempo. Ahora bien; como el ruido interior tiene un fuerte efecto sobre la venta del vehículo, es importante tener la capacidad de poder estimar el nivel del ruido con suficiente exactitud por medio de simulación en la etapa del diseño. Tal necesidad ha iniciado una extensa investigación en las técnicas de simulación [1].
1.1 Vibraciones y Ondas.
El ruido acústico se define usualmente como un sonido no deseado. Producto de actividades normales de la sociedad día a día. En términos físicos, sonido es la vibración mecánica de un gas, líquido o medio elástico-sólido a través del cual, la energía se transfiere lejos de la fuente por ondas progresivas. Cuando un objeto se mueve o vibra, una pequeña porción de la energía implicada se pierde al medio circundante como sonido.
Las partículas oscilan por si mismas hacia una sola distancia infinitesimal sobre su posición de equilibrio, a lo largo de la dirección de propagación de la onda de sonido, como se muestra en la figura 1.1.
Fig. 1.1. Movimiento de una partícula durante un ciclo (Acoustic Noise Measurements, Quinta edición).
El tiempo tomado para que el movimiento se transfiera entre las partículas sucesivas y por lo tanto la velocidad de propagación del disturbio, la cual depende de la elasticidad del medio de acuerdo a la siguiente ecuación:
ρ E k
c= (1.1)
Donde k es una constante, E y ρ son el modulo de elasticidad y densidad del medio. Para el aire bajo condiciones normales, la velocidad c es aproximadamente 344 m/s a 20P
° PC [3].
1.2. Potencia del Sonido.
Cualquier fuente de ruido tiene una potencia de sonido característico, una medida fundamental de su rendimiento acústico, mientras el nivel de presión del sonido origina una dependencia sobre muchos factores externos, que incluye la distancia y orientación del receptor, el gradiente de temperatura, velocidad y medio ambiente. Por otra parte la potencia del sonido es una propiedad esencialmente física del sonido, por lo que es un parámetro importante y ampliamente utilizado para clasificar y comparar las fuentes de sonido [3].
1.3. Propagación del Sonido en el Aire.
último efecto es mucho más grande para altas frecuencias que para bajas, así que, la atmósfera tiende a actuar como un filtro, atenuando las altas frecuencias y distorsionando la frecuencia espectral del sonido; además reduce su fuerza y cambia la propagación en el trayecto. La mayoría de las medidas se realizan cerca del terreno donde el ruido es recibido invariablemente y es donde las personas viven y trabajan [3].
1.4. Efecto
del
Viento.
La atmósfera está en un estado de movimiento continuo sobre la superficie de la tierra y también es un fluido real con todas sus propiedades físicas incluyendo la viscosidad. Debido a que el aire es viscoso y la velocidad de las moléculas en el nivel del terreno debe ser cero, una capa es formada cerca de la superficie, en que la velocidad del viento se incrementa gradualmente con la altura hasta que la velocidad de la masa principal del aire se atenúe. Cuando una onda de sonido repercute en una capa de aire que tiene diferente velocidad, la dirección de las ondas viajeras cambian, esto pasa por que la velocidad del sonido depende solamente sobre el medio en que se propaga, así cualquier movimiento de este medio debe necesariamente imponer un movimiento similar en la onda de sonido como se ve desde el terreno [3].
1.5. Reflexión.
[image:19.612.136.479.486.689.2]Cuando las ondas del sonido entran en contacto con una superficie, parte de la energía se refleja desde la misma así como otra parte es transmitida a través de la superficie y parte absorbida por la superficie. La presión instantánea del sonido en cualquier punto del campo es debido a la radiación directa de la fuente y al sonido llegando indirectamente después de una o más reflexiones de la superficie, donde una parte de su energía, aunque pequeña es absorbida. El rayo reflejado de una superficie rígida plana ocupa una posición como la que se muestra en la figura 1.2, el rayo y la onda del sonido frontal pueden ser considerados ser parte de la imagen [3].
1.6. Escalas para el Ruido.
El oído no responde linealmente sino logaritmicamente a estimulaciones. Por esta razón es más práctico expresar los parámetros acústicos como una razón logarítmica del valor medido para un valor de referencia. Esto reduce el número a proporciones manejables y la unidad resultante, llamada el Bel el cual se definió como el logaritmo base 10 de la razón de dos potencias acústicas o intensidades. Como la intensidad acústica es la potencia pasando a través de un área unitaria en el espacio y es proporcional al campo lejano al cuadrado de la presión del sonido, una escala conveniente para la medida acústica puede definirse como:
0 10 2
0 10 p
p p log 20 p
p log 10 L Sonido del
esión Pr de
Nivel ⎟⎟ =
⎠ ⎞ ⎜⎜ ⎝ ⎛ =
Donde p es la presión del sonido medida, pB0 Bes la presión del sonido de referencia, usualmente 20μPa, y la palabra nivel se adiciona a la presión del sonido como una indicación que la cantidad tiene un cierto nivel sobre algunos valores predefinidos.
Cualquier medida puede ser expresada en decibeles, mientras el valor absoluto de referencia para la unidad base es la razón logarítmica citada. El uso de la escala decibel
reduce un rango dinámico de la presión del sonido de un millón a 1 a un rango mas manejable de los niveles de la presión del sonido de solo 0 a 120. El cero indica la referencia mínima del umbral y 120 la aproximación del umbral del dolor. La figura 1.3
muestra muchos sonidos bien conocidos apropiadamente puestos con respecto al nivel de presión del sonido en la que ellos son normalmente escuchados y sus frecuencias máximas [3]. La potencia acústica es también medida en decibeles debido al enorme rango de potencia encontrado en problemas de ruido típico. El nivel de potencia se define como 10 veces el logaritmo base 10 de la razón de la fuente de potencia a la referencia de potencia, normalmente tomada como 10P
-12
P watt, matemáticamente es:
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ =
0 10 w
W W log 10 L Sonido del
otencia P
de Nivel
Fig. 1.3. Niveles de presión de sonido típico de fuentes de sonidos común (Acoustic Noise Measurements, Quinta edición).
La aproximación de potencia de salida de un rango de algunas fuentes de ruido regularmente encontrados se indican en la figura 1.4. Esto demuestra el problema de magnitud y rango dinámico que están siempre implicados cuando el ruido y medida acústica se hacen.
1.7. Características de las Señales de Ruido
Fig. 1.4. Salida de Potencia del Sonido de alguna fuente de sonido típica (Acoustic Noise Measurements, Quinta edición).
[image:22.612.91.526.456.685.2]Desafortunadamente la mayoría de los sonidos no son sinusoidales, como en algunas señales típicas se muestra en la figura 1.6.
Fig. 1.6. Señales del sonido y sus espectros (Acoustic Noise Measurements, Quinta edición).
1.8. Análisis de Estructuras.
El Automóvil visto como una estructura es una estructura importante conformada por una gran diversidad de elementos unidos entre sí. El estudio de cada uno de estos elementos puede realizarse por separado, pero teniendo siempre presente la interacción con el resto de la carrocería.
De esta manera el cálculo de estructuras está íntimamente ligado con la resistencia de materiales. Para esto es imprescindible un estudio preciso de la resistencia de los materiales para realizar una estructura, pero un perfecto estudio del cálculo de esta estructura permite mejor aprovechamiento de las características de los materiales.
Actualmente, en todos los casos, el proceso de cálculo se basa en descomponer el modelo en una serie de elementos que no interfieran entre sí, mediante un mallado de la estructura. Los sistemas discretos o continuos, conducen a ecuaciones con un número muy grande o infinito de elementos, que solo pueden ser resueltas mediante procedimientos numéricos o matemáticos. Pero estos resultan en la mayoría de los casos extremadamente complicados en lo que a matemática se refiere, por lo que su aplicación directa es reducida a problemas planteados en modelos matemáticos en los cuales se puedan implementar métodos numéricos apropiados según sea el problema.
La discretización del modelo de la pieza a calcular consiste en dividir al modelo en una cantidad lo suficientemente aceptable en pequeños elementos finitos. Las formas de discretizar problemas continuos se conocen como técnicas de partición del dominio dentro de las cuales la técnica o conocida como el método de los elementos finitos, que si bien comenzó a utilizarse únicamente en el cálculo de estructuras, ahora se ha expandido a multitud de campos tanto de las ciencias como de la ingeniería.
El estudio concreto del cálculo de estructuras consiste, a grandes rasgos, en calcular la relación entre fuerza y desplazamiento para cada elemento componente de la estructura. A continuación, se procede al ensamblaje del conjunto de elementos, en el que, inevitablemente, se debe establecer el equilibrio de fuerzas en cada punto de unión. Es evidente que ese equilibrio existe, sino la estructura se rompería. Gracias a esta igualdad necesaria se pueden encontrar las incógnitas desconocidas.
El mallado del cálculo de estructuras mediante elementos finitos no abarca únicamente los puntos de unión entre las diferentes piezas, sino un entramado que distingue entre elementos mucho más pequeños [4].
1.9. Puntos débiles de las carrocerías.
La calidad del viaje tiene que ver con la sensación que tienen los pasajeros cuando el vehículo está en movimiento. Los problemas de cansancio surgen principalmente por vibraciones mecánicas en la carrocería del vehículo, las cuales pueden ser provocadas por una variedad de causas, como: irregularidades en la superficie del camino, fuerzas aerodinámicas, vibraciones debidas a: el motor, o a la caja de transmisión o los engranes, o al desbalance en el montaje de las llantas con las ruedas entre otros . Las irregularidades de la superficie pueden ser desde baches o topes hasta variaciones aleatorias en la elevación del perfil, estas irregularidades actúan como la principal fuente que excita la vibración de la carrocería del vehículo a través del montaje de la llanta en la rueda y el sistema de suspensión. Las excitaciones por fuerzas aerodinámicas son ejercidas directamente a la carrocería del vehículo, mientras las provocadas por el motor y la caja de engranes, son transmitidas mediante los montantes (tacones de hule), al bastidor. Las excitaciones resultantes de los desbalances de las masas, variaciones en dimensiones y rigideces del montaje entre rueda y llanta son transmitidas a la carrocería por medio de la suspensión.
1.10. Razones de transmisión del ruido al habitáculo.
Dos son los caminos que utiliza el sonido para llegar hasta el habitáculo: los sólidos y el aire. A través de los sólidos, dependiendo de sus características, se propagan los efectos vibratorios. También, a través de los orificios imprescindibles de las carrocerías, por los que pasan cables o tubos, se propaga el ruido. En estos casos, la propagación no se realiza a través de un sólido, sino que es el aire mismo que transmite el sonido.
La carrocería por su estructura y forma, puede actuar como amplificador de las vibraciones que recibe, ya que diferentes paneles o elementos pueden entrar en resonancia con la señal vibratoria que reciben.
Los sólidos a través de los que se propagan las ondas son principalmente el bastidor y la carrocería. Sin embargo a ellos les llegan las ondas sonoras (que por ser elásticos, en los sólidos se transmiten longitudinalmente y transversalmente) a través de los soportes elásticos que unen el motor al bastidor, de las suspensiones y sus uniones, de la dirección y también a través de manguitos de calefacción, cables de acelerador y embrague, velocímetro, etc. Cualquier sólido es aprovechado por el sonido para introducirse en el habitáculo. Cualquier perforación de la carrocería que no se encuentre perfectamente sellada también es utilizada por el sonido para penetrar. Se sabe que estos orificios, denominados agujeros acústicos, en caso de que existan, son los máximos responsables de la presencia de frecuencias medias y altas en los interiores de los vehículos [4].
1.11. Formulación del Problema.
En este trabajo presentamos un estudio con dos enfoques, a saber el primero: Variacional
La presente investigación se centra en realizar la simulación acústica-estructural a través de un modelo matemático de una pequeña cámara acústica hecha de placas de acero por el método del elemento finito. El potencial e importancia de este tipo de análisis está fuertemente relacionado con el sector automotriz. Por lo que se pretende dejar un registro del procedimiento seguido para el análisis modal de sistemas acústicos-estructurales acoplados, así como de la implementación en la computadora.
CAPITULO II
FORMULACION VARIACIONAL
DEL MEF EN ACUSTICA
En este capítulo se darán los conceptos básicos para obtener las matrices de masa y rigidez del sistema acústico de un sistema utilizando la teoría básica del método del elemento finito. Primeramente se da una breve introducción a la teoría de la onda unidimensional, posteriormente se parte de la ecuación de Helmholtz para obtener las ecuaciones correspondientes para vibración acústica.
La implementación del método del elemento finito se puede subdividir en tres amplios pasos: 1) Establecer las propiedades de modelación e interpolación sobre el elemento, 2) Ensamblar las matrices de cada elemento así como su interpolación ,3) Resolver el sistema matricial global que representa el problema a resolver.
2.1. La Ecuación de la Onda Unidimensional.
Deduciremos la formulación Variacional de los problemas hiperbólicos tales como los gobernados por la ecuación de la onda que en una dimensión podemos expresar como:
( )
2 22 22 1
,
t u
c t x x
u
∂ ∂ = ∂
∂
(2.1.1)
En la mecánica del medio continuo una gran mayoría de problemas involucran elementos y/o máquinas consideradas como cuerpos continuos, por ejemplo, el estudio de los modos de vibración axial, transversal o torsional de una flecha de transmisión, conduce al estudio de vibraciones en medios continuos.
constante de rigidez K, espaciadas una cantidad Δx considerada como constante (figura 2.1).
Δx
equilibrio
X i-1 X i X i+1
UBi-1
Figura 2.1. Sistema acoplado de resortes, mostrando la posición de equilibrio y el sistema desplazado.
Si uBiB denota el desplazamiento de la partícula i, es decir, del desplazamiento del nodo i de masa Δm, la energía cinética T del sistema de partículas será la suma de las TBiB=½ΔmůP
2
PBiB:
∑ Δ =
i i i
u m
T 2
2 1
donde
t u
u i
∂ ∂
= (2.1.2)
Por otro lado, la energía potencial para cada una de las partículas es la debida al potencial elástico de las fuerzas de tensión y compresión que experimenta la partícula i (figura 2.1), obteniendo de la misma manera un potencial total V de toda la cadena, para lo cual plantearemos lo siguiente: -K(uBiB – uBi-1B) para el sistema en compresión y K(uBi+1B – uBiB) para el mismo en tensión; siendo el desplazamiento neto hacia la derecha de la partícula |uBi+1 B– uBiB| y el correspondiente a la izquierda |uBi B– uBi-1B|. Así entonces, la fuerza actuando sobre la partícula i será:
FBiB = K(uBi+1B- uBiB) – K(uBiB- uBi-1B). Ley de Hooke (2.1.3) esta fuerza FBi;B puede derivarse de una función de potencial VBi,B como es fácil ver de:
(
)
(
)
21 2
1
2 1 2
1
i i i
i
i K u u K u u
V = − − − + − (2.1.4)
derivándola:
(
i i)
(
i i ii
u u K u
u K u V
− −
− =
∂ ∂
+
−1 1
)
(2.1.5)y observando que:
(
−1−)
−(
− −1)
= ∂ ∂ −
= i i i i
i i
i K u u K u u
u V
F (2.1.6)
U i
desplazado
Figura 2.2. Sistema de resortes mostrando puntos de tensión y compresión. Δx
xB
i-1
xB
i
xBi+
1
UB
i-1
UB
i
UBi+
1
Ahora bien, del hecho de que la función Lagrangiana viene dada por:
L = T – V
tenemos, para nuestro sistema de partículas que discretizan la barra:
(
)
(
)
∑Δ − ∑ − − ∑ −
= + − 2
1 2 1 2 2 1 2 1 2 1 i i i i
i K u u K u u
u m L (2.1.7) Así: ∑ =∑ Δ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − Δ Δ Δ = + −
i i i
i i i i i x x u u x K x u u x K u x m x L L 2 1 2 1 2 i 2 1 (2.1.8)
donde LBiB es la Lagrangiana de la i-ésima partícula, LBi B = (TBiB - VBiB)Δx.
(
)
(
)
(
)
xx u u x K x u u x K u x m t u
ui i i i i i
i i Δ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ Δ − Δ − Δ − Δ − Δ Δ = = − − 2 2 1 2 2 1 2 2 1 , , L L (2.1.9)
Así, las ecuaciones de Euler-Lagrange para cada masa puntual i quedan:
0 = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ i i i i u u dt
d L L
(2.1.10)
haciendo cálculos en LBiB y substituyendo en la expresión anterior:
i i u x m u Δ Δ = ∂ ∂Li
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ = ∂ ∂ + − 2 1 2 1 i x u u x K x u u x K u i i i i i L
obtenemos como la ecuación de Euler-Lagrange para i:
0 2
1 2
1 ⎟ =
⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ + Δ Δ − + x u u x K x u u x K u x
m i i i i
i (2.1.11)
Ahora vamos a proceder al límite cuando Δx → 0, es decir, refinando la discretización lo que se consigue aumentando el número de partículas a lo largo de la barra y por consiguiente disminuyendo el espacio Δx entre ellas. Esto constituye el meollo del asunto en el modelaje de modelos continuos mediante la aproximación de modelos discretos. Pero antes de proceder vamos a hacer algunas consideraciones a lo que se refieren algunas cantidades: Δm/Δx y KΔx al pasar al límite Δx → 0.
De la ley de Hooke de relación esfuerzo-deformación, se tiene que:
(
)
x u
ui i
i Δ
−
= +1
ε (a)
(
)
(
)
x u u x K u u Kfi i i i i
Δ − Δ = − = +
+1 1 (b)
(2.1.12)
Las ecuaciones 2.1.12 representan (a) la deformación y (b) el esfuerzo unitario que experimenta la partícula i en el nodo xBiB, de esta manera, al tender al límite Δx → 0, las cantidades Δm/Δx y KΔx, representan la densidad σ(x), es decir, la constante módulo de Young (E) del material, siendo:
x m x x Δ Δ → Δ = 0 lim ) ( σ x m x E Δ Δ → Δ = 0 lim
Por otro lado, el nodo i de la cadena xBiB, que experimenta un desplazamiento uBiB, entonces podemos considerar:
(
)
(
x x t)
u u t x x u u i i i i , , 1 1 Δ − = Δ + = − +Así las deformaciones unitarias quedarán:
(
) ( )
x t x u t x x u x u ui i iΔ Δ Δ
, ,
1− = + −
+
( ) (
)
x t x x u t x u x uui i i i
Δ Δ Δ
, ,
1 = − −
− − (2.1.13)
que substituidas en las ecuaciones de Lagrange:
( )
,[
(
,) ( )
2 ,]
[
( ) (
, 2 ,)
]
02 2 = Δ Δ − − Δ + Δ − Δ + Δ − ∂ ∂ Δ Δ x t x x u t x u x K x t x u t x x u x K t x t u x
m i i i i
i (2.1.14)
procediendo al límite y del hecho de que:
( )
(
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ Δ + − Δ = ∂ ∂ + − → 2 1 1 0 2 2 2 lim , x u u u x K t x t ux i i i
x i
σ (2.1.15)
se obtiene que para cada xBiB:
( )
,(
,)
0lim 2
2 2
2
0 ∂ =
∂ − ∂ ∂ = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ∂ ∂ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ ∂ ∂
→ x x t
u E t x t u u u
t i i
i i i x σ L L (2.1.16)
que es la ecuación de la i-ésima partícula.
( )
, 2( )
, 02 2 2 = ∂ ∂ − ∂ ∂ t x x u E t x t u i i σ (2.1.17)
Por otro lado, con relación a la Lagrangiana, se tiene que:
( )
∑ ⎟⎟Δ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ Δ Δ = + i i i i x x u u x K t x t u xm 2 1 2
, 2
1
L (2.1.18)
y reemplazando a xBiB por x, se tiene en general L
(
u,u,t)
como:( )
∑ ∫ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = Δ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Δ − Δ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ Δ Δ + → i L i i i x dx x u E t u x x u u x K t x t u x m 0 2 2 2 1 2 0 2 1 , 2 1de donde se obtiene:
(
)
∫ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂= L dx
x u E t u t u u 0 2 2 2 1 , , σ L (2.1.20)
que es la funcional energía para la vibración axial de la barra. Sin embargo, por conveniencia haremos σ /E = 1 / cP
2
P de tal manera que la Lagrangiana adopte la forma:
∫ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂
= L dx
x u t u c 0 2 2 2 1 2 1 L (2.1.21)
Ahora bien, el principio de Hamilton dice que, de entre todas las trayectorias posibles en que el sistema se traslada durante los tiempos tB1B y tB2B, existe una trayectoria tal, que la funcional:
[ ]
=∫
1 2 t t dt u I L Satisface a:[ ]
u =0I
δ
(2.1.22)
Además, sabemos que el principio de Hamilton es una condición necesaria y suficiente para que se verifiquen las ecuaciones de Euler-Lagrange del movimiento, entonces se tiene que: la trayectoria u(x, t) representa un valor estacionario de la energía I(u), esto es:
( )
∫ ∫ = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ ∫ = = 2 1 0 2 2 2 2 1 0 1 2 1 t t L t t dxdt x u t u C uI δ δ
δ Ldt (2.1.23)
nótese que el término -½ no afecta en absoluto el proceso de derivación de I(u). Por lo que podemos tomar como expresión definitiva para nuestra funcional a:
( )
∫∫ = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ = 2 1 0 2 2 2 0 1 t t L dxdt t u c x u u I (2.1.24)lo que representa la funcional energía llamada de la Acción de Hamilton de nuestro sistema continuo o sea, la cuerda elástica homogénea de longitud l y cuya ecuación es:
2 2 2 2 2 1 t u c x u ∂ ∂ = ∂ ∂
donde: cP 2
P = T/σ representa la razón de la tensión de la cuerda a su masa por unidad de longitud, la cual, para un problema real, estará sujeta a condiciones tanto de frontera como iniciales.
Condiciones de frontera:
u(0,t) = u(l,t) = 0 (2.1.25)
Condiciones iniciales:
u(x, 0) = f(x) ; 0 < x < l
( )
x,0 g(x) tu
= ∂
∂
; 0 < x <l
(2.1.26)
La energía cinética está dada por:
∫ ⎟
⎠ ⎞ ⎜ ⎝ ⎛
∂ ∂
= t dx
x u T
0 2
2 1σ
(2.1.27a)
y la energía potencial será entonces:
∫ ⎟
⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂
= t dx
x u V
0 2
2 1ρ
(2.1.27b)
Ahora bien, el principio de Hamilton implica la verificación de las ecuaciones de Euler-Lagrange para el sistema de partículas discretizado de nuestra barra sometida a vibración axial:
0
= ∂ ∂ − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛
∂ ∂
u u
dt
d L L
y cuya funcional Energía corresponde a la ecuación (2.1.1) bajo condiciones iniciales (2.1.25) y de frontera (2.1.26):
[
u u t I , ,]
2 2 2 2 2 1
t u
c x
u
∂ ∂ = ∂ ∂
; 0 < x < l; 0 < t < ∞
que es una ecuación diferencial hiperbólica, donde el operador diferencial:
[ ]
[ ]
2 12[ ]
2t c
2 2
x D
∂ ∂ = ∂ ∂
Elípticas en donde el operador diferencial era definido positivo y por consiguiente aseguraba que toda solución u de ella, representaba un valor extremal de I(u). Esto significa que los algoritmos numéricos basados en esta funcional no necesariamente convergen a la única solución del problema, como es el caso de los operadores diferenciales elípticos definidos positivos. Esto es valido en general, para los problemas de ingeniería con valores iniciales, no existe una formulación variacional que asegure valores extrémales, sin embargo, sirven en el sentido de que podemos determinar soluciones aproximadas a la solución del problema, es decir, a los valores estacionarios de I(u). Para este fin se requiere que las funciones u sobre las que se este ensayando la solución deban de satisfacer las condiciones de frontera: u(0,t) = u(l,t) = 0 en forma esencial.
2.2. La Formulación Variacional Lagrangiana y el Método del Elemento
Finito.
2.2.1. Cuerpos con Geometría Regular.
A fin de deducir las ecuaciones generales del método del elemento finito para el análisis de vibraciones lineales, continuaremos nuestra línea de exposición al analizar una barra prismática (figura 2.3) de longitud L y de sección transversal A susceptible de experimentar desplazamientos periódicos a lo largo de su eje x; es decir, vibraciones axiales.
Figura 2.3. Barra prismática susceptible de vibraciones axiales.
3
2 1
Para esto, vamos a dividir nuestro modelo Ω, o sea la barra, en una familia de elementos:
( ) {
Ω Δ(1),Δ(2),...,Δ(E)}
Ρ = (2.2.1)
Esto se logra seleccionando una serie de puntos xB1B, xB2B, ..., xBpB a lo largo del eje de la barra con cierto criterio de ingeniería y que depende deΩ (figura 2.4).
ΔP
(1)
P ΔP
(2)
P ΔP
(3)
P ΔP
(E-1)
P ΔP
(E)
xB1 BxB2 BxB3B xBp-1 BxBpB 1 2 3BB p-1 p
Figura 2.4. Representación con elementos finitos.
donde cada uno de los elementos ΔP (e)
Ptiene por extremos i, j (figura 2.5) y de masa . Donde son respectivamente la densidad, área de sección
) ( ) ( ) / )
(e e e e
L A
m =ρ
Δ /e), (e), (e)
L A
transversal y longitud del elemento ΔP (e)
P. Siendo que nuestro estudio es el analizar los desplazamientos axiales de la barra, esto equivale a analizar los desplazamientos de cada uno de los ΔP
(e)
P y por consiguiente el análisis de los desplazamientos axiales que sufren los nodos i, j de cada elemento ΔP
(e) P.
∆(X)
Figura 2.5. Representación de un elemento con sus nodos.
i j
esto se logra asumiendo una cantidad variable que nos aproxime linealmente los desplazamientos que experimentan los puntos x del elemento Δ(e) en el instante t. Sea u(x, t) el desplazamiento del punto x en el instante t, como xBiB <= x <= xBj,B donde = xBjB – xBiB denotaremos a
) (e
L
( )
x tU~(e) , los desplazamientos del elementoΔ(e). De esta manera:
( )
( )( ) ( )
( ) ( )
t U x N t U x N t xU~(e) , = ie i + j j (2.2.2)
será un polinomio de interpolación lineal local que aproximará los desplazamientos de los puntos en el instante t. Las funciones conocidas como las funciones de forma del polinomio,U
)
(e (e) (e)
( )
e ,
x∈Δ Ni ,Nj
t x
~( )
, estas funciones vienen expresadas como:
( )
( )
( )⎟⎠⎞ ⎜ ⎝ ⎛ − = e e i L x xN 1 ; 0 ≤ x ≤ LP (e)
P
( )
( )
( )e e j L x x N = (2.2.3)y tienen las siguientes propiedades:
( )
( )
= ( )( )
=0i e j j e
i x N x
N
( )
( )
= ( )( )
=1j e j i e
i x N x
N
( )
( )
= ( )( )
=1 x N xNie je ; xi ≤ x≤xj
(2.2.4)
resultando que los desplazamientos U~(e)
( )
x,t en los nodos i, j de Δ(e) sean:) ( ) ( ) ( ) ( ) ( ) , ( ) ( ) ( ) ( ) ( ) ( ) , ( ) ( ) ( ) ( ) ( t U t U x N t U x N t x U t U t U x N t U x N t x U j j j e j j j e i j e i j i e j i i e i i e = + = = + =
donde UBiB(t), UBjB(t) son los valores nodales en el instante t, o valores nodales dinámico del polinomioU~(e)
( )
x,t . También observe que:( )
( )
[
( )( )
( )( )
]
( )
permite determinar la velocidad de los desplazamientos de los nodos i, j para cadaΔ(e).
( )
( )
( )( )
[
( )( )
( )( )
]
( )
( )
[
N( )( )
x]
{ }
U( )
t t U t U x N x N t x t U t x U e j i e j e i e i e = ⎭ ⎬ ⎫ ⎩ ⎨ ⎧ = ∂ ∂ = , , , (2.2.6)y por consiguiente la energía cinética de la masa , llamada también energía cinética local, de cada elemento queda expresada por:
) (e m Δ ) (e Δ ( )
( )
∫
( ) ( ) ( )( )
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ = e L e ee x t dx
t U m t T 0 2 , 2
1 Δ (2.2.7)
En cuanto a su energía potencial que es el trabajo realizado por las fuerzas elásticas la variar ) ( ) ( t V e
( )
e t xU~( ) , con relación a x, t:
( )
( )
( ) ( )( )
( )∫
⎥⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∂ ∂ = e L e ee x t dx
t U EA t V 0 2 , 2 1 (2.2.8)
Estas expresiones locales de las energías cinética y potencial pueden ser expresadas también en forma interpolada:
[
( ) ( ) ( ) ( )]
3 2 1 ) ( ) ( 1 2 1 ) ( 2 2 ) ( ) ( 0 2 ) ( ) ( ) ( ) ( ) ( t U t U t U t U L m dx t U L x t U L x m t T j j i i e e L j e i e e e e + + Δ = = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − Δ =∫
(2.2.9)[
() 2 () () ()]
2 1 ) ( , ) ( 2 1 ) ( ) ( , 2 1 ) ( 2 2 ) ( ) ( 0 0 2 ) ( ) ( ) ( 2 ) ( ) ( ) ( ) ( ) ( () t U t U t U t U L EA dx L t U L t U EA dx t U t U dx dN dx dN EA t V j j i i e e L l e j e i e j i e j e i e e e e + − = = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ =
∫
∫
(2.2.10)Ahora bien, la energía local asociada al elemento Δ(e) que nos permite establecer las
ecuaciones del movimiento es la función de Lagrange L P (e)
P(t):
( )e
( )
t =T( )e( )
t −V( )e( )
tL (2.2.11)
[
]
[
( ) 2 ( ) ( ) ( )]
así, esta Lagrangiana local L(e)(t)=L(e)
(
Ui,Ui,Uj,Uj,t)
permitirá establecer las ecuacionesde Euler-Lagrange para cada elementoΔ(e). Entonces, calculando localmente se obtiene:
) ( )
( EA
- ((e)) (())
(e) t U L EA t U L
U e j
e i e i + = ∂ ∂L ) ( 3 2 1 ) ( 3
m(e) ( ) ( ) ( ) (e) t U L m t U L U j e e i e i Δ Δ + = ∂ ∂L ) ( 3 2 1 ) ( 3
m(e) ( ) ( ) ( ) (e) t U L m t U L U dt d j e e i e i Δ Δ + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂L ) ( 3 ) ( 3
m(e) ( ) ( ) ( ) (e) t U L m t U L U i e e j e j Δ + Δ = ∂ ∂L ) ( ) ( EA ) ( ) ( ) ( (e) (e) t U L EA t U L
U e j
e i e j − = ∂ ∂L ) ( 3 2 1 ) ( 3
m(e) ( ) ( ) ( ) (e) t U L m t U L U dt d i e e j e j Δ Δ + = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂L
Substituyendo en las ecuaciones de Euler-Lagrange locales, para los nodos i, j, tenemos:
0 (e) (e) = ∂ ∂ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ i i U U dt
d L L
0 (e) (e) = ∂ ∂ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ j j U U dt
d L L
(2.2.13) obteniéndose: 0 ) ( ) ( EA ) ( 3 2 1 ) ( 3 m ) ( ) ( ) ( (e) ) ( ) ( ) ( (e) = − +
+ U t
L EA t U L t U L m t U L j e e i e j e e i e Δ Δ 0 ) ( ) ( EA ) ( 3 2 1 ) ( 3 m ) ( ) ( ) ( (e) ) ( ) ( ) ( (e) = + −
+ U t
L EA t U L t U L m t U L j e e i e i e e j e Δ Δ (2.2.14)
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − + ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 0 0 ) ( ) ( ) ( ) ( 3 m 3 2
1 2 3
1 3 m ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( (e) ) ( ) ( ) ( ) ( ) ( (e) t U t U L EA L EA L EA L EA t U t U L L m L m L j i e e e e e e e e j i e e e e e e Δ Δ Δ Δ (2.2.15) o bien: ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ = ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − + ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ 0 0 ) ( ) ( 1 1 1 1 ) ( ) ( 2 1 1 2 6 m ) ( ) ( ) ( (e) t U t U L EA t U t U L j i e e j i e Δ (2.2.16) donde:
[
]
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 2 1 1 2 6 m m(e) Δ (e)L(e)Δ (2.2.17)
[ ]
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = 1 1 1 1 ) ( ) ( ) ( e e e L EA K (2.2.18)Las matrices de masa y rigidez local y los vectores de posición y aceleración de los nodos i, j del elemento Δ(e) en t son:
{ }
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ = ) ( ) ( ) ( t U t U t U j i{ }
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ = ) ( ) ( ) ( t U t U t U j i (2.2.19)Finalmente. las ecuaciones del movimiento locales son:
[
Δm(e)]{ } [ ]
U(t) + K(e){ } { }
U(t) = 0 (2.2.20)ecuación que es conocida como oscilación libre de los nodos i, j del elemento ΔP (e)
P.
Para el caso en que el movimiento se viera sujeto a fuerzas de fricción o disipativas del tipo Rayleigh, tendríamos para ese elemento ΔP
(e)
P la expresión de la fuerza de disipación de Rayleigh:
( )
( )( )
( )
( )( )
( )
⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ = ∂∂ 2 2
2 1 , 2 1 t t U x N t t U x N t t x
U e j
j i
e i
(
2 2)
donde: j j j U U α − = ∂ ∂F (e)
-i i i U U α − = ∂ ∂F(e)
-que serán las fuerzas de fricción de los nodos i, j, de esta manera las ecuaciones de Euler-Lagrange quedan: ) ( ) ( ) ( ) ( 1 ) , ( ) ( ) ( 0 ) ( ) ( 0 ) ( ) ( ) ( t U t f dx L x t U t f dx L x t x f W j L e j e i L e i e e e e δ δ δ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ + + ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −
=
∫
∫
(2.2.22)0 (e) (e) (e) = ∂ ∂ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ∂ ∂ j j
j U U
U dt
d L L F
(2.2.23)
o expresadas en forma matricial:
[
Δm(e)]{ } [ ]{ } [ ]
U(t) +α(e) U(t) + K(e){ } { }
U(t) = 0 (2.2.24)conocida como la ecuación de las oscilaciones amortiguadas.
Por último, el caso en que existen fuerzas externas y no conservativas, que fuerzan al elemento ΔP
(e)
P a oscilar. Estas fuerzas las podemos representar por f(x, t), donde f(x, t) comprende la fuerza distribuida en el elemento ΔP
(e)
P, digamos f(x, t) y las fuerzas en los extremos i, j del elemento producidas por los elementos adyacentes ΔP
(e-1)
P, digamos fBiB(t), fBjB(t). Para determinar la expresión de las fuerzas generalizadas IBQB(t), QBjB(t) en los nodos del elemento , consideremos un desplazamiento virtual del elemento ΔP
(e)
P, el cual vendrá expresado por los desplazamientos virtuales de los nodos i , j, es decir:
)
(e (e)
Δ δU (x,t)
) ( ) ( ) ( ) ( ) , ( ( ) ( ) ) ( t U x N t U x N t x
U e ie δ i je δ j
δ = + (2.2.25)
De acuerdo con el principio de D’Alambert el trabajo desarrollado por las fuerzas externas sobre el sistema para cualquier desplazamiento virtual debe ser nulo, entonces:
) ( ) ( ) , ( ) , ( ) , ( ) , ( ( ) ( ) ( ) ( ) ( ) ) ( t U f t U f t x U t x f t x U t x f
W e δ e e δ e ieδ i jeδ j
δ = = + + (2.2.26)
) ( ) ( ) ( ) ( 1 ) , ( ( ) ( ) 0 ) ( ) ( ) ( ) ( t U f t U f dx t U L x t U L x t x f
W ie i je j