ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
DESARROLLO DE UNA RED PARA INSTRUMENTACIÓN
ELECTRÓNICA BASADA EN EL PROTOCOLO CAN,
UTILIZANDO MICROCONTROLADORES
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTA:
JESÚS ANDRÉS SÁNCHEZ RÍOS
ASESOR:
DR. RAÚL PEÑA RIVERO
A ti que me acompañaste hasta el final; a quien por muchos años me hizo sentir amado; a ti que por mucho tiempo supiste darme paz y felicidad, hoy expreso mi gratitud, porque créeme que no hay nada mejor que espere de la vida para ambos. Sé que la distancia y el tiempo son difíciles de asimilar, pero qué significan esas palabras cuando sabes que el infinito es todo nuestro. Gracias por haber sido durante tantas madrugadas un despertador para mí. A ti debo un gran afecto, porque aun sin péndulo o cuarzo, fuiste la única que supo despertarme a tiempo con un abrazo y un beso cálido; a veces con té y pan tostado, a veces sin ellos, pero igual suficiente para empezar un nuevo día.
Espero que sigamos siendo jóvenes y encontrarnos pronto, porque de lo único que estoy seguro ahora, es que no hace falta tanta experiencia para enfrentar al mundo, sino conservar la curiosidad y juventud para conocerlo todo; para descubrir lo feliz que podemos ser. Hoy estoy consciente de que tengo mi lugar en el mundo y el universo; me siento enormemente agradecido con la vida y espero que tú también sientas lo mismo. Porque no importa lo perdido que estemos, bastará recordar lo que hemos sido y lo que somos para seguir el camino hacia adelante, con ánimo inagotable y eterna esperanza.
Me siento muy feliz de haber hecho tantas cosas contigo, como creo que ningún hombre y ninguna mujer las han hecho jamás. Esos viajes, esas noches de cerveza y guitarra, de buenas pláticas y tantas otras cosas, sé que habrán valido la pena porque nos sentiremos tan felices al recordarlo todo. Esto es lo que nos dará el ánimo para seguir sonriendo; para seguir caminando y descubriendo las cosas que la vida nos reserva; las que nos harán disfrutar de esos periodos de dicha y alegría que tanto anhelamos. Estoy seguro que al final de todo, en algún lugar, miraremos hacia atrás y desearemos lo mejor para el otro, porque esa es la forma en la que aprendimos a querernos.
Por su amor y sus deseos llenos de esperanza. Que la incertidumbre y desesperación, no les impida recordar el pasado para que así puedan continuar esa silenciosa vigilia por lo que nos espera.
“Tus hijos no son tus hijos, son hijos e hijas de los anhelos que la vida tiene de sí misma”.
“No vienen de ti, sino a través de ti, y aunque estén contigo, no te pertenecen”. “Puedes darles tu amor, pero no tus pensamientos, pues ellos tienen sus propios
pensamientos”.
“Puedes abrigar sus cuerpos, mas no sus almas, porque ellas viven en la casa del mañana, que ni aun en sueños puedes visitar”.
“Puedes esforzarte en ser como ellos, pero no procures hacerlos semejantes a ti,
porque la vida no retrocede ni se detiene en el ayer”.
“Tú eres el arco por medio del cual tus hijos, como flechas vivas son impulsados hacia adelante”.
“El arquero ve el blanco sobre el camino del infinito, y las dobla con toda su
fuerza, a fin de que sus flechas vayan veloces y lejos”.
“Que el hecho de estar en manos del arquero sea para su dicha y felicidad,
porque así como él ama la flecha que dispara, ama también el arco que permanece
firme”.
“Por eso tuviste la libertad de amar y hacer tu vida. Deja que tus hijos vuelen
solos del nido cuando llegue la hora, y no les reclames para que vuelvan”.
“Ellos te querrán por siempre y tendrán también su nido, del cual algún día ellos solos quedarán. Pero fue su nido y su vida; déjalos libres”.
“Ámalos con libertad y no apagues el fuego de su hogar. Vive y deja vivir, así
ellos siempre te querrán”.
Índice de figuras ... VII
Índice de tablas ... XII
Índice de Gráficas ... XIV
Índice de Ecuaciones ... XIV
Lista de abreviaturas ... XVII
Resumen ... 1
Introducción ... 2
Objetivo ... 3
Justificación ... 3
Organización del trabajo de tesis ... 5
Capítulo 1 - Protocolo CAN en la instrumentación electrónica, telemetría y control .... 8
1.1 Buses de campo en las redes de control ... 12
1.1.1 Buses de alta velocidad y baja funcionalidad ... 13
1.1.2 Buses de alta velocidad y funcionalidad media ... 13
1.1.3 Buses de altas prestaciones ... 14
1.2 Interfaces eléctricas RS-232 y RS-485 ... 14
1.3 Principales diferencias entre el protocolo CAN y Ethernet estándar ... 17
1.3.1 Tramas por segundo (FPS) ... 17
1.3.1.1 Ethernet estándar ... 17
1.3.1.2 Protocolo CAN ... 18
1.6 Herramientas existentes en el mercado para aplicaciones CAN ... 25
1.6.1 Sistemas de evaluación LM3S8962 (Ethernet + CAN) y LM3S2965 (CAN) ... 25
1.6.2 CAN/LIN/J2602 PICtail (Plus) Daughter Board ... 28
1.6.3 Interfaces DeviceNet y CANopen de National Instruments ... 31
Capítulo 2 - Diseño electrónico de una red CAN ... 33
2.1 Requerimientos del sistema ... 33
2.2 Módulos de la Tarjeta ECAN Central ... 37
2.2.1 Fuente de energía de la Tarjeta ECAN Central ... 37
2.2.2 Microcontrolador dsPIC33FJ128MC804 ... 39
2.2.2.1 Capacitor VCAP ... 40
2.2.2.2 Cristal de oscilación (Tarjeta ECAN Central) ... 40
2.2.3 Módulo exhibidor de la Tarjeta ECAN Central ... 40
2.2.3.1 Control de energía del módulo exhibidor ... 41
2.2.4 Módulo temporizador para la medición de hora y fecha ... 46
2.2.5 Teclado PS/2 ... 49
2.2.5.1 Descripción general del protocolo PS/2 ... 51
2.2.6 Almacenamiento en memoria portátil ... 53
2.2.6.1 Características generales del protocolo SPI ... 56
2.2.6.2 Control de energía del módulo de almacenamiento ... 57
2.2.7 Periféricos de entrada de propósito general ... 58
2.2.7.1 Botón de reinicio (RESET) ... 58
2.2.7.2 Botones auxiliares A, C, D y E ... 63
2.2.7.3 Botón para interrupción externa ... 63
2.2.8 Conector ICSP (Tarjeta ECAN Central) ... 64
2.2.9 Transceptor MCP2551 (Tarjeta ECAN Central) ... 64
2.2.9.1 Asignación de terminales del transceptor MCP2551 ... 65
2.2.9.2 Terminales CANL (CAN LOW) y CANH (CAN HIGH) ... 66
2.2.9.5 Salida para la recepción de datos (RXD) ... 67
2.2.9.6 Terminal de salida para voltaje de referencia (VREF) ... 67
2.2.9.7 Modos de operación del transceptor MCP2551 ... 68
2.2.9.7.1 Modo de alta velocidad ... 68
2.2.9.7.2 Control de pendiente (Slope-control) ... 68
2.2.9.7.3 Modo de espera (standby) ... 69
2.2.9.8 Conexión básica del transceptor MCP2551 ... 69
2.2.10 Conector de entrada/salida del bus diferencial CAN (Tarjeta ECAN Central) . 70 2.3 Módulos de la Tarjeta ECAN Remota ... 71
2.3.1 Fuente de energía de la Tarjeta ECAN Remota ... 71
2.3.2 Microcontrolador PIC24HJ64GP502 ... 73
2.3.2.1 Capacitor VCAP ... 74
2.3.2.2 Cristal de oscilación (Tarjeta ECAN Remota) ... 74
2.3.3 Módulo exhibidor de la Tarjeta ECAN Remota ... 74
2.3.4 Módulo analógico/digital ... 74
2.3.4.1 Voltaje de referencia a base del regulador MCP1525 ... 76
2.3.5 Módulo para la medición de temperatura ... 77
2.3.6 Módulo para el control de un LED RGB ... 78
2.3.7 Periféricos de entrada/salida de propósito general... 79
2.3.7.1 Botón de reinicio ... 79
2.3.7.2 Botones A, B e INT_EXT ... 79
2.3.7.3 Conector AUX_I/O ... 79
2.3.7.4 Puentes (Jumpers) ... 80
2.3.7.5 LED para entrenamiento ... 82
2.3.8 Conector ICSP (Tarjeta ECAN Remota) ... 83
2.3.9 Transceptor MCP2551 (Tarjeta ECAN Remota) ... 83
2.3.10 Conector de entrada/salida del bus diferencial CAN (Tarjeta ECAN Remota) . 83 2.4 Red de comunicación CAN ... 84
2.4.3 Máxima longitud de bus ... 94
2.4.4 Máximo número de nodos ... 102
Capítulo 3 - Programación de la red CAN ... 107
3.1 Introducción ... 107
3.2 Compilador y lenguaje de programación ... 107
3.3 Bibliotecas de lenguaje C... 109
3.3.1 Bibliotecas del compilador MikroC ... 110
3.3.2 Bibliotecas de usuario ... 110
3.3.2.1 Biblioteca para el control de pantalla LCD ... 111
3.3.2.2 Control para el reloj de tiempo real ... 111
3.3.2.3 Biblioteca para teclado PS/2 ... 112
3.4 Programación de la tasa de transferencia de una trama de datos CAN ... 115
3.4.1 Trama estándar del protocolo CAN ... 115
3.4.1.2 Tipos de tramas del protocolo CAN ... 117
3.4.2 Tiempo de bit de una trama CAN (CAN Bit timing) ... 118
3.4.2.1 Tiempo de bit nominal ... 118
3.4.2.2 Segmento de sincronización (SYNC_SEG) ... 119
3.4.2.3 Segmento de propagación (PROP_SEG) ... 119
3.4.2.4 Segmento de fase 1 y 2 (PHASE_SEG1, PHASE_SEG2) ... 119
3.4.2.5 Punto de muestreo ... 119
3.4.2.6 Modo de muestreo ... 120
3.4.2.7 Tiempo de procesamiento de información ... 120
3.4.2.8 Salto de sincronización (SJW) ... 120
3.4.2.9 Sincronización ... 121
3.4.2.9.1 Sincronización Hard ... 121
3.4.2.9.2 Resincronización ... 121
3.4.2.10 Time Quantum ... 121
3.5 Desarrollo del programa para la comunicación CAN punto a punto ... 129
3.5.1 Lógica de programación para la Tarjeta ECAN Central ... 129
3.5.2 Lógica de programación para la Tarjeta ECAN Remota ... 135
Capítulo 4 - Pruebas y mediciones ... 137
4.1 Introducción ... 137
4.2 Mediciones ... 138
4.2.1 Mediciones de tiempo de una trama CAN ... 139
4.2.1.1 Medición de tiempo en la tarjeta maestra ... 139
4.2.1.2 Medición de tiempo en la tarjeta esclava ... 151
4.2.2 Medición de tensión de una trama CAN ... 160
4.2.2.1 Medición de tensión en modo común ... 160
4.2.2.1 Medición de tensión en modo diferencial ... 163
4.3 Pruebas del sistema de comunicación CAN ... 167
4.3.2 Iluminación para decoración ... 168
4.3.3 Aplicación para instrumentación electrónica y telemetría ... 172
4.3.4 Resultados obtenidos en la aplicación de telemetría haciendo uso de un cable de 100 [m] de longitud ... 176
Capítulo 5 - Conclusiones y trabajo futuro ... 179
5.1 Conclusiones ... 179
5.2 Trabajo futuro ... 181
Referencias ... 182
Apéndice 1 ... 187
A.1 Diagramas, esquemas y tarjetas de circuito impreso de la Tarjeta ECAN Central . 187 A.1.1 Asignación de terminales del dsPIC33FJ128MC804 ... 187
A.1.4 TCI del reloj de tiempo real (RTC), conector PS/2 y zócalo para tarjeta SD ... 195
Apéndice 2 ... 197
A.2 Diagramas, esquemas y tarjetas de circuito impreso de la Tarjeta ECAN Remota . 197 A.2.1 Asignación de terminales del PIC24HJ64GP502 ... 197 A.2.2 Diagrama esquemático y TCI de la Tarjeta ECAN Remota... 198
Apéndice 3 ... 204
A.3 Diagramas esquemáticos de las tarjetas de circuito impreso diseñadas en el capítulo 2. ... 204
Apéndice 4 ... 207
Índice de figuras
Figura 1.1: Sistema de evaluación EKS-LM3S8962 (Ethernet+CAN) de la compañía Texas
Instruments. ... 26
Figura 1.2: Sistema de evaluación EKS-LM3S2965 (CAN) de la compañía Texas Instruments. ... 26
Figura 1.3: Tarjeta CAN/LIN/J2602 PICtail (Plus) conectada a un zócalo de la tarjeta de desarrollo y exploración 16. ... 29
Figura 2.1: Diagrama a bloques de los módulos que integran a la TEC. ... 37
Figura 2.2: Diagrama eléctrico de la fuente de energía de la Tarjeta ECAN Central. ... 38
Figura 2.3: Control de la alimentación del módulo exhibidor (El bit 2 del puerto B del dsPIC33FJ se utiliza como señal de control.). ... 42
Figura 2.4: Diagrama eléctrico propuesto para el reloj de tiempo real (la señal SQW no se utiliza en esta aplicación). ... 48
Figura 2.5: Asignación de terminales del conector PS/2 para teclado. ... 50
Figura 2.6: Circuito utilizado en la TEC, el cual permite el uso del teclado PS/2. ... 52
Figura 2.7: Arquitectura de la tarjeta SD. Las terminales se encuentran configuradas para operar en el modo SPI. ... 55
Figura 2.8: Circuito de control para el suministro de energía de la memoria SD. ... 58
Figura 2.9: Circuito de reinicio de la tarjeta maestra. ... 59
Figura 2.10: Circuito para los botones A, C, D y E de la tarjeta maestra. ... 63
Figura 2.11: Nombre y asignación de las terminales del transceptor CAN empleado. ... 65
Figura 2.12: Conexión básica del transceptor MCP2551 en la tarjeta maestra. ... 70
Figura 2.13: Diseño final de Tarjeta ECAN Central. Módulos que la integran (microcontrolador, módulo exhibidor, fuente de energía, entre otros). ... 72
Figura 2.14: Diagrama a bloques de la Tarjeta ECAN Remota. ... 72
Figura 2.16: Conexión del regulador de precisión MCP1525 en la tarjeta esclava. ... 76
Figura 2.17: Circuito serie RC para el sensor de temperatura LM35DZ. ... 78
Figura 2.18: Botones A y B, conector header auxiliar de entrada/salida (AUX_I/O) y voltaje de referencia para el convertidor A/D (MCP1525). ... 80
Figura 2.19: Conexión entre las terminales RA0, RA1, RB0 y RB1 y los módulos que se encuentran multiplexados en ellos. Los conectores J1-J4 están ubicados en la misma secuencia que los de la figura 2.18. J5 representa al conector AUX_I/O. ... 81
Figura 2.20: Conexión de la terminal RB14 hacia terminales digitales o analógicas; LED_RB14 y entrada analógica AN10 respectivamente. El conector J2 representa al header AUX_ANX (ver figura 2.15) ... 82
Figura 2.21: Diseño final de la Tarjeta ECAN Remota. ... 84
Figura 2.22: Red de comunicación CAN. ... 85
Figura 2.23: Parte superior; cable de 120 [Ω] empleado para instalaciones fijas. Parte inferior; cable de 120 [Ω] empleado para aplicaciones de gran flexibilidad (piezas de máquinas móviles). Ambos se emplean para enlazar nodos CAN. ... 86
Figura 2.24: Secciones de una línea bifilar. Separación entre los ejes de los conductores y diámetro de cualquiera de ellos, representados por S y dw respectivamente. ... 87
Figura 2.25: Línea de longitud infinita. ... 88
Figura 2.26: Línea finita acoplada. ... 89
Figura 2.27: Línea finita desacoplada. ... 89
Figura 2.28: Red de comunicación CAN con una línea de transmisión de impedancia característica Z0. ... 91
Figura 2.29: Diagrama eléctrico del esquema de la Figura 2.28. ... 95
Figura 2.30: Reducción del circuito eléctrico de la figura 2.29. En éste se incluyen las corrientes de cada malla. ... 97
Figura 3.1: Ambiente gráfico de desarrollo del compilador MikroC PRO para dspic30/33 y PIC24. ... 109
Figura 3.2: Señales del protocolo serial PS/2. ... 113
Figura 3.4: Segmentos de bit en una trama de datos del protocolo CAN [43]. ... 118
Figura 3.5: Relación entre el oscilador del microcontrolador, el oscilador del sistema CAN y el periodo de cada bit de la trama de datos [43]. ... 122
Figura 3.6: Primer paso para obtener el cálculo del tiempo de bit dado un oscilador de 40 [MHz] (recordar que FOSC = Fcy) y una tasa de transferencia requerida de 1 Mbps. ... 127
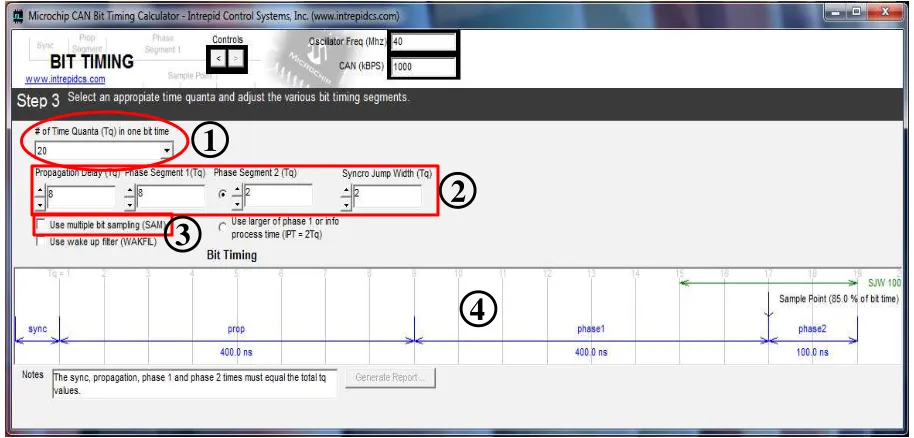
Figura 3.7: Paso número 2 para el cálculo de los segmentos del tiempo de bit. ... 128
Figura 3.8: Paso número 3 para el cálculo del tiempo de bit. ... 128
Figura 3.9: Diagrama de flujo de la tarjeta maestra (parte 1/3). ... 132
Figura 3.10: Diagrama de flujo de la tarjeta maestra (parte 2/3). ... 133
Figura 3.11: Diagrama de flujo de la tarjeta maestra (parte 3/3). ... 134
Figura 3.12: Diagrama de flujo para el control de la tarjeta esclava. ... 136
Figura 4.1: Conexión de la punta de osciloscopio en la salida de la tarjeta maestra. ... 140
Figura 4.2: Conexión de la punta de osciloscopio a la tarjeta maestra. ... 140
Figura 4.3: Bit de inicio e identificador de la trama de datos CAN con una tasa de transferencia de 1 [Mbps]. ... 143
Figura 4.4: Bit RTR y campo de control de la trama de datos @ 1 [Mbps]. ... 143
Figura 4.5: Inicia el campo de datos. Primeros dos bytes transmitidos (Arreglo [0] = 0x88 y Arreglo [1] = 0x77). ... 144
Figura 4.6: Bytes dos y tres de la trama CAN (Arreglo [2] = 0x66 y Arreglo [3] = 0x55). ... 145
Figura 4.7: Tiempo total medido en la trama de datos CAN @ 1 [Mbps]. ... 146
Figura 4.8: Espacio entre trama (17 [µs]). ... 146
Figura 4.9: Bit de inicio e identificador (0x555) de la trama de datos entregada por el osciloscopio con una tasa de transferencia de 40 [kbps]. ... 148
Figura 4.10: Bit RTR y campo de control de la trama de datos @ 40 [kbps]. ... 148
Figura 4.12: Medición de la trama de datos CAN con un total de 76 unidades de bit @ 40 [kbps]. ... 150
Figura 4.13: Espacio entre-trama. Medición realizada a 40 [kbps] en la salida de la tarjeta maestra. ... 150
Figura 4.14: Cable UTP categoría 5 con una longitud de 100 [m]. ... 152
Figura 4.15: Conexión de la punta de osciloscopio en la entrada de la tarjeta esclava ... 153
Figura 4.16: Conexión de la punta de osciloscopio en la tarjeta esclava (nodo receptor) .. 153
Figura 4.17: Bit de inicio (color rojo) e identificador (0x555) de la trama de datos con una tasa de transferencia de 1 [Mbps]. Medición realizada en la entrada de la tarjeta esclava. 156
Figura 4.18: Bit RTR y campo de control de la trama de datos @ 1 [Mbps]. Medición realizada en la entrada de la tarjeta esclava. ... 156
Figura 4.19: Bit de inicio e identificador de la trama de datos entregada por el osciloscopio con una tasa de transferencia de 40 [kbps]. ... 158
Figura 4.20: Bit RTR y campo de control de la trama de datos @ 40 [kbps]. ... 159
Figura 4.21: Amplitud de una trama de datos CAN con tasa de transferencia de 1 [Mbps]. Medición realizada en la salida de la tarjeta maestra. ... 161
Figura 4.22: Amplitud de una trama de datos CAN con tasa de transferencia de 1 [Mbps]. Medición realizada en la entrada de la tarjeta esclava. ... 161
Figura 4.23: Amplitud de una trama de datos CAN con una tasa de transferencia de 40 [kbps]. Medición realizada en la salida de la tarjeta maestra. ... 162
Figura 4.24: Amplitud de una trama de datos CAN con una tasa de transferencia de 40 [kbps]. Medición realizada en la entrada de la tarjeta esclava. ... 162
Figura 4.25: Conexión de las puntas de osciloscopio para la medición de los niveles de tensión de una trama de datos CAN en modo diferencial. ... 163
Figura 4.26: Conexión de las puntas de osciloscopio en la tarjeta esclava para la medición de la tensión en modo diferencial ... 164
Figura 4.27: Nivel de tensión dominante en la terminal CANH. Medición realizada a una tasa de transferencia de 1 [Mbps] en la salida de la tarjeta maestra. ... 164
Figura 4.28: Nivel de tensión dominante de la terminal CANH. Medición realizada a una tasa de transferencia de 40 [kbps] en la salida de la tarjeta maestra. ... 165
Figura 4.30: Conexión de la lámpara RGB a la tarjeta esclava. ... 171
Figura 4.31: Funcionamiento de la lámpara RGB con una secuencia de colores. ... 171
Figura 4.32: Diagrama a bloques del proceso de medición y almacenamiento en memoria portátil de la temperatura ambiente. ... 172
Figura 4.33: Archivo de texto generado por la tarjeta maestra y almacenado en memoria SD. ... 174
Figura 4.34: Bit de inicio e identificador de la trama de datos CAN (la cual contiene la temperatura medida en la tarjeta esclava), a una tasa de transferencia de 666.667 [kbps]. Medicion realizada en la entrada de la tarjeta maestra ... 177
Figura 4.35: Campo de datos de la trama CAN, la cual fue transmitida por la tarjeta esclava a la Tarjeta ECAN Central. Esta medición se realizó en la entrada de la tarjeta maestra (TEC). ... 178
Figura A1.1: TCI del adaptador para el microcontrolador dsPIC33FJ128MC804. ... 188
Figura A1.2: Diagrama esquemático de la TEC, parte 1 de 4 ... 189
Figura A1.3: Diagrama esquemático de la TEC, parte 2 de 4. ... 190
Figura A1.4: Diagrama esquemático de la TEC, parte 3 de 4. ... 191
Figura A1.5: Diagrama esquemático de la TEC, parte 4 de 4. ... 192
Figura A1.6: TCI de la tarjeta maestra vista por su parte inferior. ... 192
Figura A1.7: Capa de componentes de la tarjeta maestra. Arriba; Vista superior-mirror. Abajo; Vista superior-normal. ... 193
Figura A1.8: TCI del reloj de tiempo real (RTC). ... 195
Figura A1.9: TCI del conector PS/2. ... 195
Figura A2.1: Diagrama esquemático de la TER, parte 1 de 2. ... 198 Figura A2.2: Diagrama esquemático de la TER, parte 2 de 2. ... 199 Figura A2.3: Capa de componentes de la tarjeta esclava. Arriba; Vista superior-mirror. Abajo; Vista superior-normal. ... 200
Figura A2.4: Diseño de la TCI correspondiente a la tarjeta esclava, complemento de la figura A2.3. ... 201
Índice de tablas
Tabla 1.1: Principales diferencias entre una red de datos y una red de control. ... 10
Tabla 1.2: Características generales de los estándares RS-232 y RS-485. ... 16
Tabla 1.3: Principales beneficios que ofrece el protocolo CAN. ... 23
Tabla 1.4: Características y módulos con los que cuenta el sistema de evaluación EKS-LM3S8962 de Texas Instruments. ... 27
Tabla 1.5: Características de la tarjeta de desarrollo y exploración 16. ... 30 Tabla 1.6: Relación de los microcontroladores incluidos en los diferentes sistemas de desarrollo tanto de Texas Instruments como de Microchip. ... 31
Tabla 1.7: Características principales de las herramientas para desarrollo industrial con protocolo DeviceNet (NI PXI-8461) y CANopen (NI PCI-8531) de National Instruments.32
Tabla 2.1: Comparación de las características entre diversos microcontroladores y microprocesadores. ... 35
Tabla 2.2: Ventajas y desventajas que presenta el teclado PS/2 en comparación con otros periféricos de entrada como el teclado touch y el teclado matricial de 16 teclas. ... 51 Tabla 2.3: Códigos de exploración de algunos botones del teclado PS/2. ... 52
Tabla 2.4: Asignación de terminales de la tarjeta SD cuando se opera con el protocolo SPI. ... 55
Tabla 2.6: Funciones asignadas a las terminales del transceptor CAN de la figura 2.11. .... 66
Tabla 2.7: Posición que deben tomar los puentes (jumpers) de la figura 2.19 para seleccionar cada uno de los diferentes módulos. ... 81
Tabla 2.8: Longitud de bus vs. Bit Rate. ... 94
Tabla 2.9: Valores útiles para el cálculo de la longitud máxima de bus y número máximo de nodos del protocolo CAN (ver hoja de datos del dispositivo MCP2551). ... 103
Tabla 3.1: Trama de 11 bits correspondiente al make code de la tecla ENTER del teclado PS/2 de computadora. ... 113
Tabla 3.2: Descripción general de los campos de la trama CAN estándar. ... 116
Tabla 4.1: Tasa de transferencia real, tiempo de bit medido y tasa de transferencia medida en la salida de la tarjeta maestra. ... 141
Tabla 4.2: Total de bits de la trama de datos medida. ... 145
Tabla 4.3: Tasa de transferencia real, tiempo de bit medido y tasa de transferencia medida en la entrada de la tarjeta esclava, al utilizar un cable de 100 [m] de longitud. ... 154
Tabla 4.4: Amplitud de la trama de datos CAN. ... 165
Tabla 4.5: Niveles de tensión dominante y recesivo de la trama de datos CAN. ... 166
Tabla 4.6: Comparación de los niveles de tensión entre el estándar ISO-11898-2 y el transceptor MCP2551. ... 167
Tabla 4.7: Otras características de operación del LED RGB de 3 [W] de potencia. ... 168
Tabla A1.1: Terminales del adaptador dsPIC33FJ128MC804. ... 187
Tabla A1.2: Lista de capacitores utilizados en la TEC. ... 194
Tabla A1.3: Lista de los resistores empleados en la TEC. ... 194
Tabla A1.4: Lista de conectores empleados en la TEC. ... 194
Tabla A1.5: Otros componentes empleados en la TEC. ... 195
Tabla A2.1: Disposición de las terminales en un encapsulado DIP (Dual In-Line Package)
del PIC24HJ64GP502. ... 197
Tabla A2.2: Lista de los resistores empleados en la TER, figuras A2.3 y A2.4. ... 201
Tabla A2.3: Lista de capacitores utilizados en la TER. ... 202
Tabla A2.4: Lista de conectores empleados en la TER. ... 202
Tabla A2.5: Otros componentes empleados en la TER. ... 202
Tabla A2.6: Costos de los sistemas de desarrollo de Texas Instruments y Microchip. Los precios se dan con referencia al 6 de septiembre del 2012. ... 203
Tabla A2.7: Costo aproximado del sistema desarrollado en este trabajo de tesis. ... 203
Índice de Gráficas
Gráfica 2.1: Slew rate vs. valor de resistencia para el control de pendiente. ... 69Gráfica 4.1: Gráfica de la temperatura de una habitación. ... 174
Gráfica 4.2: Edición de los datos contenidos en el archivo de la memoria SD con ayuda de Excel, lo cual permite obtener una gráfica más espaciada en el tiempo. ... 175
Índice de Ecuaciones
(2-1) Ecuación de la malla base-emisor de una transistor BC547 ... 43(2-2) Ecuación de la malla colector-emisor de un transistor BC547 ... 44
(2-3) Cálculo de la resistencia de base de un transistor BC557 (segunda etapa de inversión) ... 44
(2-4) Tensión entre la base del transistor BC557 y una terminal común de la fuente ... 44
(2-5) Ecuación de la malla colector-emisor de un transistor BC557 ... 45
(2-7) Corriente en un resistor R, obtenida por ley de Kirchoff de voltajes ... 60
(2-8) Voltaje en un resistor R1, obtenido a partir de la ley de Ohm ... 60
(2-9) Voltaje en un capacitor para un tiempo t = 0–... 60
(2-10) Carga en un capacitor para un tiempo t = 0– ... 60
(2-11) Voltaje en un capacitor para un tiempo t = 0 ... 61
(2-12) Carga en un capacitor para un tiempo t = 0 ... 61
(2-13) Corriente en un capacitor para un tiempo t = 0 ... 61
(2-14) Ley de Kirchoff de voltajes en un circuito RC ... 61
(2-15) Corriente en un capacitor en función de la derivada respecto al tiempo de la carga en dicho capacitor ... 61
(2-16) Ley de Kirchoff de voltajes en función de la carga de un capacitor ... 61
(2-17) Carga en un capacitor para cualquier tiempo t ... 61
(2-18) Impedancia característica de un cable par trenzado ... 87
(2-19) Coeficiente de reflexión en la carga de una línea de transmisión ... 89
(2-20) Relación de onda estacionaria en función de la potencia incidente y reflejada ... 90
(2-21) Relación de onda estacionaria en función del coeficiente de reflexión ... 90
(2-22) Síntesis de la ecuación (2-20) ... 90
(2-23) Potencia reflejada en una línea de transmisión ... 90
(2-24) Potencia total entregada por un transmisor ... 91
(2-25) Cálculo de la resistividad de un alambre ... 95
(2-26) Resistencia de un alambre en función de la resistencia especifica por unidad de longitud ... 96
(2-27) Voltaje de entrada en función de corrientes en un nodo CAN conectado en un extremo de la red ... 97
(2-29) Voltaje necesario en un nodo CAN en función de la tensión dominante de umbral de
dicho nodo ... 100
(2-30) Relación entre el voltaje de entrada mínimo y el voltaje de entrada necesario en un nodo CAN ... 101
(2-31) Longitud máxima de bus ... 102
(2-32) Número máximo de nodos permitidos en una red CAN ... 103
(3-1) Tasa de transferencia de datos nominal en función del periodo de un bit ... 118
(3-2) Tiempo de bit en función de los segmentos SYNC_SEG, PROG_SEG, PHASE_SEG1, PHASE_SEG2 del protocolo CAN ... 118
(3-3) Segmento de fase 2 en función del tiempo de procesamiento de información ... 120
(3-4) Time Quantum en función de la frecuencia del oscilador del microcontrolador ... 121
(3-5) Periodo de un bit en función de la tasa de transferencia de datos nominal ... 122
(3-6) Periodo de bit en función de la cantidad de time quantums ... 122
(3-7) Frecuencia del sistema CAN ... 123
(3-8) Número de time quantums en función del tiempo de bit ... 124
(3-9) Número de time quantums en función de la frecuencia del oscilador ... 124
(3-10) Prescaler en función de la frecuencia del sistema CAN ... 124
(3-11) Cálculo del punto de muestreo en un bit de la trama CAN a un 90% ... 125
Lista de abreviaturas
A Área de la sección transversal de un alambre. A1, A2, A3, A4 Apéndices 1,2, 3 y 4.
A/D Conversión de datos analógicos a digitales.
ABS Sistema antibloqueo de ruedas. Del alemán Antiblockiersystem.
AC Corriente alterna.
AM Antes del mediodía/meridiano. Notación para medir la hora en un reloj.
Ampl. Amplitud de una señal.
AN10, AN11, ANX Canales analógicos disponibles en un microcontrolador. La X representa un número variable de canal analógico, el cual dependerá del microcontrolador que se emplee.
AUX_ANX Entrada auxiliar para una señal analógica.
AUX_I/O Entrada y/o salida auxiliar para datos o señales digitales.
AWG Siglas de Calibre de Alambre Norteamericano. Del inglés
American Wire Gauge.
BAT Batería de respaldo para el reloj de tiempo real.
BJT Transistor de unión bipolar. Del inglés Bipolar Junction Transistor
Bl-MAYUS Indica cuándo el teclado se encuentra en la función de escritura en letras mayúsculas.
BNC Tipo de conector para cable coaxial. Del inglés Bayonet Neill-Concelman.
BRP Del inglés Baud Rate Prescaler. Se usa para dividir la frecuencia del oscilador principal de un controlador CAN.
CAN Red para controladores de área. Del inglés Controller Area Network. Bus y protocolo del mismo nombre.
CAT5, CAT6 Cables de categoría 5 y 6
CH, ch. Canal (analógico, de entrada para osciloscopio, etc.)
CI Circuito integrado
CID Registro de identificación de una tarjeta SD (Card identification register).
COFF Formato de archivo de objetos comunes. (Common Object File Format). Este archivo se emplea para la simulación de las instrucciones que se cargarán en un microcontrolador.
CRC Comprobación de redundancia cíclica
(Cyclic redundancy check).
CS Terminal para selección de dispositivo en la tarjeta SD (Chip Select).
CSD Registro de datos específicos en una tarjeta SD (Card specific data register).
DC Corriente directa.
DMA Memoria de acceso directo (Direct Memory Access). Mecanismo eficiente para copiar datos desde los periféricos (transmisión/recepción del módulo UART, Tx/Rx del módulo CAN, etc.) y los buffers de almacenamiento en la memoria RAM, con una mínima intervención de la CPU del microcontrolador.
DPDT Se refiere al interruptor con una configuración de doble polo y doble vía. También se le conoce como: Doble polo Doble tiro. dsPIC33 Abreviación para el dispositivo dsPIC33FJ128MC804.
dw Diámetro de cualquiera de los conductores de un cable de par trenzado.
ɛ
r Permitividad relativa. Es la permitividad de un material, la cualse da normalmente en relación con la del vacío. Se la conoce también con el nombre de constante dieléctrica.
E/S Entrada y/o salida. Generalmente se refiere a las terminales digitales de un microcontrolador.
EEPROM Memoria de solo lectura (ROM) programmable y borrable eléctricamente (Electrically Erasable Programmable Read-Only Memory).
ECAN Red robustecida para controladores de área (Enhanced Controller Area Network). Este módulo ofrece algunas ventajas sobre un módulo CAN tradicional, entre otras, existe una diferencia notable en la cantidad de buffers para almacenamiento de mensajes transmitidos y recibidos por el controlador del bus, la cual es mayor en un módulo ECAN. EIA Alianza de industrias electrónicas (Electronic Industries
Alliance).
ESD Descarga electrostática (Electrostatic discharge).
FCY Frecuencia para la ejecución de instrucciones en un microcontrolador.
FET Transistor de efecto de campo (Field-Effect Transistor).
FIP Norma de origen francés que organizó los requerimientos para un bus de campo. Originalmente se le nombró Flux d'Information vers le Processus (Flujo de información hacia el proceso), después se adoptó el nombre en inglés Factory Instrumentation Protocol (Protocolo para la Instrumentación Industrial).
FOSC Fuente de oscilación principal en la operación de un microcontrolador. De ella se deriva la frecuencia de un ciclo de instrucción (FCY).
GND Su traducción literal es “tierra”, aunque en este trabajo de tesis, dicho término se refiere a la señal común de una fuente de alimentación de corriente directa (DC).
GPIB Bus de instrumentación desarrollado por Hewlett-Packard
llamado HP-IB (Hewlett-Packard Instrument Bus). Otros fabricantes copiaron dicho bus y lo nombraron General-Purpose Instrumentation Bus.
HEX Formato de archivo para la programación de microcontroladores desarrollado por INTEL. Es un archivo de texto cuyas líneas contienen valores hexadecimales, los cuales corresponden a datos a ser almacenados en direcciones específicas dentro de la memoria de un microcontrolador o microprocesador.
I2C Bus de comunicación de datos digitales en forma serial. Su nombre se deriva de Inter-Integrated Circuit (Circuitos Inter-Integrados).
IB Corriente que circula por la base de un transistor de unión bipolar.
IC Corriente que circula por el colector de un transistor de unión bipolar.
ICSP Programación de microcontroladores en circuito impreso. Se deriva del inglés In-Circuit Serial Programming.
IDE Ambiente de desarrollo integrado. Del inglés integrated development environment.
ILED Puede referirse a la corriente nominal de un LED o bien, a la corriente que circula a través de él.
INTEL Se refiere a la corporación de semiconductores, fundada como Integrated Electronics Corporation.
INT_EXT Interrupción externa de un microcontrolador.
IPT Tiempo de procesamiento de información, del inglés
Information Processing Time.
ISO Organización Internacional de Estandarización (International Organization for Standardization).
K Número real cualquiera en la solución de una ecuación diferencial lineal de primer orden.
Ksm Margen de seguridad para realizar el cálculo de la tensión diferencial de entrada requerida por un nodo CAN.
ksps Se refiere a la unidad de medida en la tasa de muestreo de un sistema de conversión de información analógica a digital. Del inglés Kilosamples per second (Miles de muestras por segundo).
L, Lmax Longitud/longitud máxima del bus CAN. LAN Red de Área Local (Local Area Network).
LCD Pantalla de cristal líquido (Liquid Crystal Display). LED Diodo Emisor de Luz (Light-Emitting Diode).
LED_RB14 Diodo Emisor de Luz conectado a la terminal RB14 del PIC24HJ64GP502.
LIN Red de Interconexión Local (Local Interconnect Network). Se emplea en la comunicación entre los diversos dispositivos eléctricos/electrónicos de un vehículo.
µ Prefijo del Sistema Internacional de Unidades que indica un factor de 10-6.
Max., MAX Se refiere al valor máximo.
MCLR Terminal de entrada para el reinicio de un microcontrolador PIC, proviene de la palabra Master Clear. Además, se utiliza para la programación de dicho dispositivo.
Msps Unidad de medida en la tasa de muestreo de un sistema de conversión de información analógica a digital. Del inglés
Megasamples per second (Millones de muestras por segundo).
n, n
max Numero de nodos/número máximo de nodos que puede aceptarel bus de comunicación en una red CAN.
n
puede referirse al prefijo del Sistema Internacional de Unidades que indica un factor de 10-9.NBR Tasa de transferencia de datos nominal. Se emplea en el cálculo del tiempo de un bit en una trama de datos CAN.
NBT Tiempo de bit nominal.
Nom. Valor nominal, teórico o ideal de cualquier cosa que pueda ser cuantificable.
OCR Registro del control de operación de una memoria SD (Operation control register).
OFF Estado de apagado en un dispositivo. ON Estado de encendido en un dispositivo.
OSC Oscilador.
OSI Modelo de interconexión de sistemas abiertos (en inglés open system interconnection).
PC Computadora personal (en inglés Personal Computer).
PCI Interconexión de Componentes Periféricos. Es un bus de ordenador, el cual sirve para conectar dispositivos periféricos (en inglés Peripheral Component Interconnect).
PDIP Encapsulado plástico en doble línea para circuito integrado (Plastic Dual-in-Line Package).
Pgen Potencia entregada por un generador o transmisor en un sistema de comunicación de datos.
PHASE_SEG1 Segmento de fase 1, éste compensa los errores de fase en el bus CAN.
PHASE_SEG2 Segmento de fase 2 (compensa los errores de fase en el bus CAN).
Pi Potencia incidente en la carga de un sistema de comunicación de datos.
PIC24HJ Abreviación para el dispositivo PIC24HJ64GP502.
PLC Controlador lógico programable (en inglés Programmable Logic Controller).
PLL Lazo de seguimiento de fase (en inglés phase-locked loop o phase lock loop).
PM Después del mediodía/meridiano. Notación para medir la hora en un reloj.
Pr Potencia reflejada hacia el generador de señal en un sistema de comunicación de datos.
PROP_SEG Segmento de propagación. Compensa los retrasos físicos que se presentan entre los nodos conectados a una red CAN.
PS/2 Conector/puerto/teclado PS/2. Toma su nombre de la serie de ordenadores IBM Personal System/2.
PVC Policloruro de vinilo. Es un polímero termoplástico.
PWM Modulación por ancho de pulsos (en inglés Pulse-width modulation).
qC Carga en un capacitor.
RAM Memoria de acceso aleatorio (Random-Access Memory).
RC Resistencia especifica de un conductor por unidad de longitud,
con unidades [Ω/m].
Rdiff Resistencia de entrada diferencial de los nodos receptores en el bus CAN.
REXT Resistor externo. Sirve para controlar el Slew-Rate del dispositivo MCP2551.
RFI Interferencia debido a radiofrecuencia (Radio Frequency Interference). Se le conoce también como interferencia electromagnética o EMI
RGB Colores primarios (rojo, verde y azul). Del inglés Red, Green, Blue.
RLCD Resistencia interna de una pantalla o exhibidor LCD. RLED Resistencia limitadora de corriente para un LED.
ROE Relación de onda estacionaria. Es una medida de la energía transmitida por un generador, la cual es reflejada por el sistema de transmisión hacia dicho generador de energía.
ROM Memoria de solo lectura (del inglés Read-Only Memory).
RS Puede referirse a una terminal de entrada del dispositivo transceptor MCP2551 o bien, al prefijo de “estándar
recomendado” (Recommended Standard).
RTC Reloj de tiempo real (Real-Time Clock).
RW Valor de resistencia correspondiente a los hilos conductores de un par trenzado.
RXD Terminal para la recepción de señal del bus CAN, la cual se encuentra en el dispositivo transceptor MCP2551.
S Separación entre los ejes de los conductores de un cable de par trenzado.
SAE Sociedad de Ingenieros Automotrices (Society of Automotive Engineers).
SCR Registro de configuración en la tarjeta SD (SD Configuration Register).
SD Tarjeta de memoria de seguridad digital (del inglés Secure Digital).
SDIP Encapsulado reducido para circuito integrado. Del inglés Shrink Dual Inline Package.
SD_STE LED (diodo emisor de luz) cuya función es indicar si la tarjeta SD se encuentra en uso o viceversa.
s Segundo/segundos (unidad de tiempo).
SJW Salto de sincronización (del inglés Synchronization Jump Width). Define el número de Time Quantums por el cual el periodo de un bit de una trama CAN se puede alargar o acortar utilizando la sincronización.
SOIC Circuito integrado de montaje superficial (del inglés Small-Outline Integrated Circuit).
SPI Interfaz serial para la comunicación de periféricos (del inglés
Serial Peripheral Interface).
SRAM Memoria Estática de Acceso Aleatorio. Es un tipo de memoria basada en semiconductores que a diferencia de la memoria DRAM, es capaz de mantener los datos mientras esté energizada sin necesidad de circuito de refresco o un circuito
latch.
STP Par trenzado con blindaje (shielded twisted pair).
SYNC_SEG Segmento de sincronización. Sincroniza a todos los nodos que se encuentran conectado al bus CAN.
TCI Tarjeta/tarjetas de circuito impreso.
TER Tarjeta ECAN Remota. Corresponde a la tarjeta esclava en el sistema de comunicación CAN.
TQ Los segmentos que conforman al tiempo de un bit en la trama de datos CAN, se componen de unidades llamadas Time Quantum, los cuales están basados en el periodo del oscilador (TOSC) de un
microcontrolador con módulo CAN.
TQFP Encapsulado de circuito integrado para montaje superficial (Del inglés Thin Quad Flat Package).
TTL Lógica transistor a transistor (del inglés Transistor-Transistor Logic).
TXD Terminal para la transmisión de señal en el bus CAN, la cual se encuentra en el dispositivo transceptor MCP2551
TXT Extensión de un archivo de texto.
UART Transmisor-Receptor Asíncrono Universal (Universal Asynchronous Receiver-Transmitter)
UL Unidad de carga (del inglés Unit Load). Es la impedancia de entrada de un receptor en un bus multipunto, el cual emplea al estándar RS-485 ó RS-422. Dicha impedancia se define con un valor mayor o igual a 12 [kΩ]. El estándar RS-485 especifica una capacidad de soporte de hasta 32 unidades de carga (UL). USB Bus Serial Universal (Universal Serial Bus).
UTP Par trenzado sin blindaje.
VBE(SAT) Voltaje de base-emisor de un transistor de unión bipolar en saturación.
VC Voltaje en un capacitor.
VCAP Terminal de los microcontroladores dsPIC33FJ128MC802 y PIC24HJ64GP502, en la cual se conecta un capacitor para la regulación y estabilización del voltaje de operación del núcleo de dichos microcontroladores.
VCC Tensión de alimentación positiva. Ésta se presenta en una tecnología de transistor BJT.
VCE(SAT) Voltaje de colector-emisor de un transistor de unión bipolar en saturación.
VDD Tensión de alimentación positiva. Ésta se presenta en una tecnología de transistor FET.
Vdiff.in.req Voltaje diferencial de entrada requerido por un nodo receptor CAN.
Vdiff.out Voltaje diferencial de salida de un nodo transmisor CAN.
VEE Tensión de alimentación negativa. Ésta se presenta en una tecnología de transistor BJT.
VIN Tensión de entrada para un dispositivo, la cual opera como fuente de alimentación.
Vi Voltaje de entrada en un sistema de comunicación de datos. VLED Voltaje de operación de un LED (diodo emisor de luz).
VOUT Tensión de salida. Generalmente es entregada por un regulador de tensión o un sensor.
VPK Valor de amplitud máximo en una señal periódica de corriente alterna.
VR Voltaje en un resistor.
VREF+ Tensión de referencia positiva para un módulo de conversión de datos analógicos a digitales.
VREF- Tensión de referencia negativa para un módulo de conversión de datos analógicos a digitales.
Voltaje para energizar una pantalla o exhibidor LCD.
VRMS Raíz cuadrada del valor cuadrático medio (en inglés Root Mean
Square), de una corriente variable en el tiempo. Se le denomina comúnmente valor eficaz.
VS Voltaje entregado por un generador.
VSS Tensión de alimentación negativa. Ésta se presenta en una tecnología de transistor FET.
Vth Voltaje diferencial de umbral en la entrada de un nodo CAN para la detección de un bit dominante.
Z0 Impedancia característica de una línea de transmisión.
Resumen
Introducción
Hoy en día, el sector industrial representa una parte fundamental para el progreso económico de una región geográfica determinada; es decir, se ha vuelto imprescindible para el desarrollo de los países con gran extensión territorial y con gran cantidad de recursos naturales, así como para aquellos países pequeños, que aunque no poseen tal cantidad de recursos, cuentan con capital humano capacitado que desea incorporarse al mundo de la modernidad, y por lo tanto, ser más competitivos a nivel global. Actualmente, los procesos industriales tanto pequeños como de gran complejidad, se auxilian del control distribuido; éste requiere de la instrumentación electrónica necesaria para la medición de diversas variables, las cuales muchas veces tienen que obtenerse a distancias relativamente grandes. Por tanto, se requiere tener sistemas fiables que puedan comunicarse entre sí en extensas líneas de transmisión, para adquirir la información suficiente y así controlar una infinidad de dispositivos tanto semiconductores como electromecánicos.
Objetivo
Diseñar y construir una red para instrumentación electrónica basada en el protocolo CAN, utilizando un par de microcontroladores, la cual deberá realizar un intercambio seguro de información y sin pérdida de datos, acorde al estándar ISO 11898-2, a una distancia de 100 metros.
Justificación
La implementación de estándares eléctricos para instrumentación electrónica tales como son: lazo de corriente 4-20 [mA], RS-232, RS-422, RS-485, y protocolos como Ethernet o HART, resultan poco convenientes cuando se pretende desarrollar una red de buena calidad. Esta característica hace referencia a aspectos fundamentales como son: eficiencia en la transmisión-recepción de datos, velocidad de transmisión para su operación en tiempo real, alta inmunidad al ruido electromagnético, fácil detección de errores y una alta confiabilidad en el intercambio de información. En la actualidad, estas características se pueden adquirir fácilmente debido a la producción masiva de controladores de diversos protocolos.
El estándar RS-232, presenta dos deficiencias que lo hacen inapropiado para aplicaciones de telemetría. Por un lado, implementa una comunicación serial en una línea de transmisión asimétrica, lo cual le impide operar en ambientes con alto ruido electromagnético. Aunado a esto, dicho estándar opera a una baja tasa de transferencia y a una distancia muy limitada de tan solo 30 [m] típicamente, y a un máximo de 60 [m] en el mejor de los casos.
El lazo de corriente de 4-20 [mA], sirve para tener transmisión analógica unidireccional de sensores y suele operar a una baja tasa de transferencia. Esta interfaz eléctrica no es un protocolo de comunicación como tal, por lo que no es apta para aplicaciones en las que se requiere una eficiente detección de errores.
El protocolo HART, el cual opera sobre el lazo de corriente de 4-20 [mA], suele ser inapropiado para determinadas aplicaciones en donde se requiere de una red multipunto y multimaestro inteligente, operando a una alta velocidad de transmisión.
Por otra parte, un receptor Ethernet únicamente verifica si la trama recibida es correcta, si no lo es, simplemente la descarta. Por lo tanto, se asume que no habrá información por parte del transmisor, así que no existirá la retransmisión. Para proporcionar esta característica, se requiere de una capa adicional de nivel más alto del modelo OSI; en este caso se trata del protocolo TCP/IP, con él se puede obtener respuesta o confirmación del mensaje, y así informar al transmisor que su trama de datos ha sido descartada. Esto implica una sobrecarga adicional al sistema de comunicación, así como también un mayor tiempo de procesamiento de los datos. Lo anterior se puede resumir de la siguiente manera: a mayor complejidad del sistema de comunicación, menor será la seguridad en el intercambio de datos con una consecuente reducción en el tiempo real de operación [2].
Organización del trabajo de tesis
Este trabajo de tesis está organizado de la siguiente forma: en el capítulo 1 se presentan las características generales del control industrial centralizado y distribuido, y cómo ambos se han visto beneficiados por la instrumentación electrónica y la producción masiva de dispositivos semiconductores (sensores, microcontroladores, PLCs, etc.). Se definen las principales diferencias entre una red de control y una red de datos, así como los protocolos de comunicación recomendados para cada una de ellas. Se definen las propiedades fundamentales de una red de control, tal es el caso de su operación en tiempo real y el nivel de seguridad con que debe contar. Se hace una introducción a los buses de campo y su importancia en las redes de control e instrumentación. Se presenta una comparación de las características principales entre el estándar RS-232 y RS-485. Por último, se exponen los antecedentes del protocolo CAN, sus principales características y aplicaciones más comunes en los diferentes sectores de la ciencia y tecnología. Además, se presentan las herramientas para aplicaciones CAN que existen en el mercado, tanto para entrenamiento como las que se orientan al sector de la automatización industrial.
En el capítulo 2 se establece el desarrollo de una red CAN, para lo cual se diseñaron y construyeron dos tarjetas de circuito impreso (mother boards). Ambas tarjetas incluyen los controladores y transceptores CAN para concretar una comunicación punto a punto. Se incluyen algunos módulos digitales en cada una de las tarjetas para el desarrollo de aplicaciones demostrativas. Se analizan las características físicas así como el funcionamiento de la línea de transmisión utilizada, tomando en cuenta las tensiones, corrientes eléctricas y reflexiones de señal. Se establecen las fórmulas para calcular la longitud máxima del bus de comunicación, así como el número máximo de nodos que puede aceptar.
protocolo CAN, así como los campos de información que contienen. Se realiza el cálculo y programación de los segmentos de tiempo que componen a cada bit en una trama CAN, con lo que se fortalece la sincronización de los nodos presentes en la red; para ello se proponen algunas consideraciones que facilitan el mencionado cálculo, así como el uso de la herramienta Microchip CAN bit timing calculator, la cual corresponde a una aplicación ejecutable de computadora. Por último, se describe en forma de diagramas de flujo, un ejemplo del funcionamiento general de una comunicación punto a punto entre las dos tarjetas diseñadas en el capítulo 2.
En el capítulo 4, se establecen las pruebas realizadas al diseño de la red del capítulo 2. Dichas pruebas consisten en la medición de tensión y tiempo de las tramas de datos emitidas por una tarjeta transmisora, así como las señales que inciden en la tarjeta receptora. Las pruebas se efectúan con diez tasas de transferencia distintas; se elabora el cálculo de cada una de ellas para compararse con las mediciones realizadas y así obtener el error del sistema. Se analizan algunas formas de onda tomadas con ayuda de un osciloscopio y se comparan con una trama de datos ideal. Se obtienen las tensiones del bus CAN en modo común y diferencial, con la finalidad de disponer de información que sirva de referencia para su comparación con los valores establecidos en el estándar ISO 11898-2. Se presentan resultados satisfactorios en la transmisión de datos a una distancia de 100 [m], con tasas máximas de transferencia de 1 [Mbps] y 666.667 [kbps], empleando un algoritmo
En el capítulo 5 se presenta una serie de conclusiones relevantes, las cuales se obtuvieron a partir de las pruebas realizadas al diseño de la red CAN descrita en el capítulo 2. Además, se plantea el trabajo futuro a realizar para agregar más prestaciones al sistema desarrollado.
En el apéndice 1 (A1) se presentan los diagramas, esquemas y tarjetas de circuito impreso (TCI) de la tarjeta maestra (TEC), así como las TCI de algunos de sus módulos digitales. Algunos temas que contiene son:
Asignación de terminales del microcontrolador dsPIC33FJ128MC804 Diagrama esquemático y TCI de la tarjeta maestra
Capa superior (TCI) de la tarjeta maestra y lista de los componentes electrónicos utilizados
Tarjeta de circuito impreso y lista de componentes electrónicos de los siguientes módulos digitales: reloj de tiempo real, conector para teclado PS/2 y conector de tarjeta SD.
En el apéndice 2 (A2) se presentan los diagramas, esquemas y tarjetas de circuito impreso de la tarjeta esclava del sistema de red CAN. De forma similar al apéndice 1, se describe el diagrama esquemático y los componentes utilizados para el correcto funcionamiento de la tarjeta de circuito impreso.
En el apéndice 3 (A3), se presenta la interconexión o diagramas esquemáticos de las tarjetas de circuito impreso desarrolladas y expuestas en el capítulo 2.
Capítulo 1
Protocolo CAN en la instrumentación electrónica,
telemetría y control
La instrumentación electrónica junto al control distribuido, ofrece grandes ventajas para el sector de la automatización industrial, ya que un pequeño microcontrolador o PLC tiene la capacidad de controlar de forma directa una o más variables de un sistema. Estos elementos de control local se comunican con otros componentes que realizan una función similar, y a su vez, éstos se comunican con niveles superiores, los cuales se encargan de supervisar el funcionamiento de los componentes del nivel inferior. Una gran ventaja que presenta este tipo de control de procesos industriales, es que si ocurre una falla en alguno de los microcontroladores o PLCs, el sistema no se verá afectado de forma general. Caso contrario ocurre cuando se emplea el control centralizado, en el que solamente existe un dispositivo de control con gran capacidad de procesamiento, el cual se encarga de controlar a todos los elementos del sistema, de tal forma que cuando éste presenta alguna falla, el sistema dejará de operar en su totalidad hasta que se repare la avería. Lo anterior implica que el tiempo de arranque del sistema puede ser muy extenso debido a la complejidad de su estructura.
Debido al creciente desarrollo de sensores inteligentes que fortalecen los procesos de producción y automatización, es conveniente implementar su control y programación de forma remota, por lo que el uso de una red de comunicación que interconecte los diversos dispositivos del sistema se vuelve imprescindible. Con base en lo anterior, se puede decir que existen dos tipos básicos de redes: redes de datos y redes de control.
Un ejemplo claro de una red de datos es Ethernet estándar, la cual fue diseñada para transportar una gran cantidad de información aunque en periodos de tiempo muy espaciados. Si dicha red se emplea para el transporte de una pequeña cantidad de mensajes y a velocidades más altas, su eficiencia tiende a reducirse considerablemente, es por ello que encuentra su mayor aplicación en la automatización de procesos administrativos o de oficina (ofimática). En cambio, las redes de control presentan un flujo de información de este tipo, en donde el tamaño de los mensajes es pequeño pero es necesario transportarlos con mayor frecuencia. El tráfico de una red de control depende directamente de variables externas, las cuales son controladas y administradas por los diferentes nodos que la componen. Con frecuencia, estos nodos necesitarán intercambiar información de forma simultánea en función de uno o más eventos externos, lo cual implica la existencia de frecuentes periodos de actividad en que muchos nodos se dispondrán a enviar pequeños paquetes de información.
Para desarrollar un sistema de control seguro, es necesario implementar una arquitectura de red que se ajuste a las características propias del tráfico de información mencionado anteriormente. En relación al diseño, se deben tener en cuenta aspectos como: los tipos de protocolos utilizados, la topología a emplear, la facilidad de administración de la red, entre otros.
Tabla 1.1: Principales diferencias entre una red de datos y una red de control.
Red de datos Red de control
Gran cantidad de paquetes de información Pequeña cantidad de paquetes de información
Baja tasa de trasmisión de paquetes Alta tasa de transmisión de paquetes Cubre un área extensa Requisitos de tiempo real
Procesador PC
Computadora con gran capacidad de procesamiento (Mainframe)
Procesador Microcontrolador PLC
PC Entrada/Salida
Teclado, mouse, escáner, etc. Impresora, pantalla, otros.
Entrada/Salida Sensor
Actuador
El desarrollo del presente trabajo de tesis debe ser visto desde la filosofía de operación de las redes de control, por lo que es necesario analizar de forma general sus propiedades. Algunos aspectos importantes que deben tenerse en cuenta en el diseño de este tipo de redes son los siguientes:
Direccionamiento de la información Elección del medio físico
Control en tiempo real Seguridad de la red
Direccionamiento de la información: En una red de control, la información debe ser originada y/o recibida por cualquier nodo. La eficiencia y fiabilidad de la red recae principalmente en la forma en que se direccionan los paquetes de información. Destacan cuatro formas de direccionamiento:
Unicast: El paquete de datos es enviado a un único destino
Multicast: El paquete es enviado a un grupo de nodos de forma simultánea Broadcast: El paquete se envía a todos los nodos de la red de forma simultánea El direccionamiento maestro-esclavo suele emplearse en las redes de control, con
Elección del medio físico: Éste parámetro afecta aspectos como la velocidad de transmisión, la distancia entre nodos y sobre todo influye en el nivel de seguridad y fiabilidad de la red. El costo del sistema es un aspecto que debe tomarse en cuenta, aunque no deben sacrificarse las prestaciones, sobre todo si se trata de seguridad en la red.
Control en tiempo real: Es indispensable contar con buenos tiempos de respuesta en las redes de control. Por lo general, las redes de datos no necesitan una respuesta real, ya que éstas suelen manipular grandes conjuntos de datos en periodos de tiempo muy espaciados. El control de acceso al medio, así como el número de capas del modelo OSI implementadas en la arquitectura de la red, resultan ser puntos críticos si se pretende alcanzar una gran velocidad de respuesta. Las redes que implementan las siete capas del módelo OSI, requieren de gran capacidad de proceso debido a la sobrecarga informática generada en comparación con un sistema que únicamente implemente las dos primeras capas (capas física y de enlace de datos). Las capas de red, transporte, sesión y presentación no son necesarias cuando se desea implementar una red de control, ya que lo que se desea obtener es velocidad en el intercambio de la información. Para incrementar de forma positiva la operación en tiempo real de una red, es necesario definir tramas de datos con diferentes prioridades, de esta manera los mensajes de alta prioridad tienen mayor facilidad para acceder al medio.
1.1 Buses de campo en las redes de control
En una red de control e instrumentación se suelen emplear los denominados buses de campo. Éstos describen a un conjunto de redes que tienen gran aplicación en el sector de la automatización industrial. La finalidad de los buses de campo consiste en brindar una red cuya comunicación se realice con una interfaz más potente que el tradicional bucle o lazo de corriente de 4-20 [mA]. Se trata de redes digitales, multipunto y bidireccionales, las cuales se auxilian de un bus serie para interconectar dispositivos de campo como son: sensores, transductores, actuadores y microcontroladores y/o PLCs. Los dispositivos de campo actúan como elementos inteligentes dentro de la red, ya que son capaces de procesar y ejecutar pequeñas funciones de control y mantenimiento, así como de comunicarse de forma bidireccional a través del bus [3],[4].
Para obtener seguridad y rapidez en un proceso industrial, es necesario implementar una red de control distribuido. Esto se consigue a través del intercambio de información en forma digital, el cual, poco a poco ha desplazado a los sistemas de transmisión analógicos. Cuando se emplea un bus de campo en una red de control, se incrementa la eficiencia del sistema en general y se reduce el tiempo de mantenimiento gracias a que la red se conforma de dispositivos inteligentes, los cuales, tienen la capacidad de informar al sistema en caso de fallas.
Las ventajas principales que ofrecen los buses de campo son:
Reducción del cableado, ya que cada dispositivo requiere de un solo cable para comunicarse con otro del mismo tipo. No es necesario realizar un cableado desde el equipo central de procesamiento a cada uno de los dispositivos de la red, como ocurre en el caso del control centralizado.
Se reducen los costos de forma considerable, el ahorro se puede observar en dos aspectos fundamentales: costo de instalación y costo de mantenimiento del sistema. Reducción de tiempo en la reparación de fallas. Esto se debe a que todos los
Facilidad para implementar modificaciones. Facilidad de expansión.
Alta velocidad de procesamiento deseñales. Alta confiabilidad de operación.
En general, cuando se emplea la tecnología de bus de campo, las prestaciones de una red aumentan debido a que la forma de obtener información desde los distintos sensores se simplifica. Las mediciones realizadas por dichos sensores, así como las decisiones que tome cada nodo, se encuentran disponibles para todos los dispositivos de campo presentes en la red. Al simplificarse la forma en la que se obtienen los datos, pueden obtenerse mejores y más sofisticados sistemas de control.
Es posible distinguir tres categorías en los buses de campo. A continuación se muestra cada una de ellas así como sus características generales.
1.1.1 Buses de alta velocidad y baja funcionalidad
Fueron diseñados para implementar aplicaciones en tiempo real
Se aplican en una pequeña área de operación (maquinaria de la planta de producción)
Posibles dispositivos a conectar: sensores, relevadores, microcontroladores, actuadores e interruptores.
Operan en la capa física y de enlace de datos del modelo OSI. Un ejemplo claro es el protocolo CAN.
1.1.2 Buses de alta velocidad y funcionalidad media
Acepta dispositivos de campo más complejos que los que se conectan a los buses de baja funcionalidad: PLCs, arrancadores de motor, válvulas, pantallas o displays
alfanuméricos o gráficos.
Ofrecen un control más sofisticado a base de funciones aplicables desde programas de computadora.
Dos ejemplos de este tipo de bus son: DeviceNet y BitBus
DeviceNet: Es un bus de campo desarrollado por Allen-Bradley que utiliza como base al bus CAN. Es ideal para la industria automotriz, industria minera, producción de papel e industria alimenticia.
BitBus: Red desarrollada por INTEL a principios de la década de 1980. Es un bus maestro-esclavo que se auxilia de la interfaz RS-485. Es fácil de operar y actualmente se considera un estándar abierto.
1.1.3 Buses de altas prestaciones
Este tipo de bus establece una comunicación a nivel global de la fábrica Son considerados buses de alta velocidad
Permiten la descarga y ejecución remota de programas Ofrecen altos niveles de seguridad en la red
Gran capacidad de direccionamiento (unicast, multicast y broadcast).
Opera en las capas: física, de enlace de datos y de aplicación del modelo OSI. Dos ejemplos de este tipo de bus son: Profibus y FIP
Profibus: Estándar alemán desarrollado a finales de la década de 1980 por compañías como Bosch y Siemens. Se trata de un protocolo maestro-esclavo aunque se puede emplear en aplicaciones multimaestro. Utiliza al estándar eléctrico RS-485 en la capa física.
1.2 Interfaces eléctricas RS-232 y RS-485
La alianza de industrias electrónicas (EIA) propuso los estándares 485, 232, RS-422, entre otros, los cuales se emplean en la transmisión de datos digitales. Los estándares
de la EIA se nombraron inicialmente con el prefijo “RS”, el cual indica estándar
diferentes fabricantes, con lo que se estableció un intercambio confiable de datos a través de distancias y velocidades de transmisión específicas entre equipos eléctricamente compatibles [5],[6].
La interfaz RS-232 es un estándar para el intercambio de datos binarios en forma serial entre dos dispositivos, el cual emplea una línea no balanceada o de terminación simple. Fue diseñada para estandarizar la conexión entre computadoras y módems de líneas telefónicas. El funcionamiento básico de la interfaz RS-232, se obtiene con tres líneas o alambres, los cuales tienen las siguientes funciones: una línea para el envió de datos, una para recepción de datos y por último, la señal común de la fuente de alimentación. La transmisión de las señales se realiza en forma bipolar, por lo que se requieren dos niveles de tensión, desde 5 a 15 [V] y de polaridad opuesta por línea de salida y 3 a 15 [V] y de polaridad opuesta por línea de entrada. La especificación RS-232 permite la transmisión de datos desde un transmisor a un receptor a una tasa de transferencia relativamente baja (hasta 20 [kbps]) y a una corta distancia (30 [m] típicamente y en el mejor de los casos hasta 60 [m] utilizando la tasa de transferencia más baja y cables de excelente calidad).
![Figura 3.3: Trama de mensajes CAN tipo estándar [41].](https://thumb-us.123doks.com/thumbv2/123dok_es/4987541.76492/144.612.100.567.408.629/figura-trama-mensajes-can-tipo-estandar.webp)
![Figura 3.5: Relación entre el oscilador del microcontrolador, el oscilador del sistema CAN y el periodo de cada bit de la trama de datos [43]](https://thumb-us.123doks.com/thumbv2/123dok_es/4987541.76492/151.612.102.538.437.640/figura-relacion-oscilador-microcontrolador-oscilador-sistema-periodo-trama.webp)
![Figura 3.6: Primer paso para obtener el cálculo del tiempo de bit dado un oscilador de 40 [MHz] (recordar que FOSC = Fcy) y una tasa de transferencia requerida de 1 Mbps](https://thumb-us.123doks.com/thumbv2/123dok_es/4987541.76492/156.612.153.491.161.427/figura-primer-obtener-calculo-oscilador-recordar-transferencia-requerida.webp)





![Figura 4.4: Bit RTR y campo de control de la trama de datos @ 1 [Mbps].](https://thumb-us.123doks.com/thumbv2/123dok_es/4987541.76492/172.612.159.480.64.308/figura-bit-rtr-campo-control-trama-datos-mbps.webp)
