N egociaci¶on de Cr eencias
ent r e A gent es Colabor at ivos
Sonia V. Rueda
Guillemo R. Simari
svr @cs. uns. edu. ar gr s@cs. uns. edu. arDepartamento de Ciencias e Ingenier¶³a de la Computaci¶on Universidad Nacional del Sur
Av. Alem 1253, (8000) Bah¶³a Blanca, Argentina
R esum en
El objetivo de este trabajo es proponer un protocolo de negociaci¶on para un grupo heterog¶eneo de agentes colaborativos. Cada miembro del grupo ut iliza un modelo de plani¯ caci¶on basada en argumentaci¶on y puede solicitar colaboraci¶on cuando su conocimient o o sus habilidades result an insu¯ cientes para alcanzar sus metas. Para efect ivizar la colaboraci¶on los agentes est¶an dotados de ciertas capaci-dades sociales que les permiten realizar y recibir propuestas. La int eracci¶on puede provocar con° ictos entre las creencias de los distintos miembros del grupo, en cuyo caso los participant es tienen que acordar un curso de acci¶on aceptable para todos. El acuerdo se establece mediant e un proceso de negociaci¶on. Most raremos una serie de ejemplos que permiten explorar las capacidades y posibles di¯ cult ades que aparecen en el desarrollo de est e proceso.
1.
I nt r oducci¶on
Un agente racional elabora y ejecuta un plan con la expectativa de satisfacer una meta. El plan de un agente individual se construye considerando su conocimiento acerca del mundo y las acciones que es capaz de realizar.
Cuando un agente forma parte de una comunidad, puede considerar no s¶olo el conoci-miento y las acciones propias, sino tambi¶en el conociconoci-miento compartido y las habilidades de los miembros del sistema en el que participa. Como contrapartida, sus acciones pueden afectar los planes de los dem¶as integrantes del grupo. Si la actitud de cada uno de ellos es cooperativa, las solicitudes de colaboraci¶on y los con° ictos pueden resolverse mediante un proceso de negociaci¶on.
La negociaci¶on produce un di¶alogo en el cual los participantes intercambian propuestas y contrapropuestas intentando llegar a un acuerdo general. La interacci¶on termina cuando hay aceptaci¶on, rechazo sin contrapropuesta o alguno de los participantes se retira. El proceso podr¶³a estar controlado por un agente que coordina el di¶alogo.
2.
L a const r ucci¶on del plan
Un agente tiene cierto conocimiento acerca del mundo y algunas habilidades que le permiten modi¯ carlo con la intenci¶on de alcanzar sus metas. Su conocimiento le permite considerar diferentes mundos posibles, pero es incompleto. Un agente conoce un hecho si ese hecho es v¶alido en todos los mundos que considera posibles. Cuando incorpora conocimiento, algunos mundos dejan de ser posibles para ¶el. As¶³, cuanto mayor sea el conocimiento de un agente, menor ser¶a el conjunto de mundos posibles [9].
La capacidad esencial de un agente racional es la de elaborar y ejecutar planes. Para su construcci¶on, el agente considera su conocimiento acerca del estado actual del mundo, suscreencias, sus expectativas respecto al estado deseado, susdeseos y sus habilidades para transformarlo. La ejecuci¶on de un plan provoca a su vez cambios en sus creencias, gener¶andose una interacci¶on din¶amica y continua.
En este trabajo el conocimiento de cada agente est¶a representado por una base de conocimiento y las habilidades est¶an asociadas con acciones que al aplicarse cambian esta base de conocimiento, agregando o removiendo hechos.
Las acciones tienen precondicionesy consecuencias. Cada acci¶on puede aplicarse s¶olo si sus precondiciones se satisfacen de alguna manera. Su ejecuci¶on provoca consecuencias que pueden modi¯ car dicha base de conocimiento. Un plan es una secuencia de acciones que al ejecutarse provocar¶an consecuencias que pueden modi¯ car la base conocimiento.
2.1.
A r gument aci¶on Rebat ible
La base de conocimiento de un agente se representa usando el lenguaje de la Programa-ci¶on en L¶ogica Rebatible (Defeasible Logic Programming, DeLP) [2, 3, 4], un paradigma de programaci¶on en l¶ogica, basado en un formalismo de argumentaci¶on rebatible [1]. El mecanismo de argumentaci¶on va a evaluar argumentos y contrargumentos para garantizar las precondiciones de las acciones. En un sentido inverso, la ejecuci¶on de una acci¶on pue-de agregar o remover hechos pue-de la base pue-de conocimiento, con la intenci¶on pue-de garantizar nuevas conclusiones.
En DeLP una base de conocimiento K = (©; ¢ ), consta de un conjunto consistente de hechos © y un conjunto de reglas rebatibles ¢ . El conocimiento estricto y las reglas rebatibles se usan para inferir conclusiones. Estas conclusiones quedan garantizadaspor el formalismo de argumentaci¶on rebatible subyacente en DeLP.
Un literal h est¶a garantizado si existe un argumento A sin derrotadores que lo soporta. Un argumento A para h es un conjunto m¶³nimo y consistente de reglas rebatibles que, junto con © permiten inferir h. Para establecer si A es un argumento sin derrotadores se realiza un an¶alisis dial¶ectico, en el cual se consideran todos los contrargumentos que, de acuerdo a alg¶un criterio, podr¶³an derrotarlo.
Las acciones que el agente es capaz de ejecutar se representan mediante un conjunto ¡ . Cada acci¶on A en ¡ es una terna ordenada hP, X,Ci , dondePes el conjunto de precon-diciones para A, Xes un conjunto consistente de literales representando las consecuencias de A, y C es un conjunto de restricciones de la forma not L, donde L es un literal. Una acci¶on se denota como:
o bien:
f X1; : : : ; Xngà ¡ f PA 1; : : : ; Pmg; not f C1; : : : ; Ckg
La revisi¶on consiste en remover todos los literales de © que son el complemento de los literales deX y luego agregar X a ©. Formalmente:
©¤X = ©¤f X1;:::;Xng= (© ¡ X) [ X
La ejecuci¶on de una acci¶on puede provocar que algunas de las precondiciones se consu-man. En este caso el complemento de la precondici¶on formar¶a parte de las consecuencias de la acci¶on.
2.2.
Plani¯ caci¶on basada en ar gument aci¶on
Cuando un agente a tiene una meta g, y g no est¶a garantizada por (©; ¢ ) , a puede buscar una acci¶on A que modi¯ que la base de conocimiento de forma tal que pueda obtenerse un argumento sin derrotadores que soporte a g. Si A no puede ejecutarse porque sus precondiciones no est¶an garantizadas, a puede buscar una secuencia de acciones que le permitan establecerlas. La secuencia completa, incluyendo a A, conforman un plan para g.
Cada acci¶on puede modi¯ car la base de conocimiento agregando literales que permitan construir nuevos argumentos.
En la elaboraci¶on de un plan se seleccionan acciones que al ejecutarse van a permi-tir obtener garant¶³as y se obtienen garant¶³as para asegurar que las acciones van a poder ejecutarse. La selecci¶on de acciones no es una tarea trivial y los problemas cl¶asicos de pla-ni¯ caci¶on se re° ejan en el esquema argumentativo. En una secuencia de acciones [A1,A2],
A2, puede ser aplicable de acuerdo al estado inicial ©, pero no luego de que A1se ejecute.
En efecto, las consecuencias de A1puede modi¯ car © de modo tal que las precondiciones
de A2 no est¶en garantizadas.
La ejecuci¶on de A1 puede:
Agregar literales que permitan construir nuevos derrotadores para las precondiciones de A2
Eliminar literales que permiten construir garant¶³as para las precondiciones de A2
El criterio propuesto en [1] para seleccionar acciones es minimizar:
Los cambios no deseados
Las precondiciones
Las restricciones
3.
A gent es colabor at ivos
El comportamiento de un agente aislado queda determinado por sus motivaciones indivi-duales, su conocimiento acerca del mundo y sus propias habilidades. Esta carac-terizaci¶on resulta insu¯ ciente para modelar a un agente que interact ¶ua en un contexto social, con una actitud cooperativa.
El conocimiento de un agente social se construye a partir de su percepci¶on del mundo que lo rodea, pero existir¶an algunos elementos cognitivos compartidos por todos los in-tegrantes del sistema. Cada individuo conocer¶a estos hechos y adem¶as razonar¶a sabiendo que los dem¶as tambi¶en los conocen y saben que son compartidos [5].
El conocimiento de cada miembro del sistema es incompleto y con frecuencia resulta insu¯ ciente para deducir un hecho espec¶³¯ co a partir de ¶el, que s¶³ podr¶³a deducirse re-uniendo todo el conocimiento distribuido en el grupo. El grupo es heterog¶eneo, de modo que sus miembros tienen habilidades diferentes. Cada uno construye planes a partir de su propio repertorio de acciones, pero cuando solicita colaboraci¶on, otro miembro del grupo puede ejecutar acciones para lograr atender el requerimiento.
Ej emplo 3.1 Sea©cla base de conocimiento compartida,K1= (©1; ¢1)yK2= (©2; ¢2)las
bases de conocimiento propias dea1 y a2, de¯ nidas como sigue:
©c= f a; bg ©1= f d; » eg
©2= f f g
¢1= f (p| < d); (q| < a; » e; f ); (r | < c)g ¢2= f (v | < a); (w| < f ; g)g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f b; dg; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f g; » bgà ¡ f ag; not f gA2
El agentea1 no es capaz de construir una garant¶³a paraqusando su conocimiento
pro-pio y el conocimiento compartido, pero s¶³ podr¶³a hacerlo si reuniera todo su conocimiento al dea2:
Reunir el conocimiento de todos los miembros del grupo, invalida las ventajas de trabajar con una comunidad de agentes. En de¯ nitiva todo el modelo podr¶³a volver a reducirse a un ¶unico agente. Una alternativa que respeta el paradigma, es que los agentes interact ¶uen solicitando colaboraci¶on cuando su conocimiento o habilidades resultan insu-¯ cientes. El grupo es heterog¶eneo y todos pueden beneinsu-¯ ciarse si cooperan entre s¶³. Sin embargo, el contacto social requiere de alguna capacidad para resolver los con° ictos que puede provocar la interacci¶on.
En el ejemplo 3.1, si a2 tiene la intenci¶on de construir una garant¶³a para w puede
decidir ejecutar A2, de modo tal que g se transforme en un hecho y w quede garantizado.
El efecto colateral de A2 ser¶a modi¯ car el conocimiento compartido, removiendo b.
©20= f f ; gg
Su decisi¶on puede entrar en con° icto con el plan de a1, si este tiene la intenci¶on de
ejecutar A1 para construir una garant¶³a que sostenga a r .
Los agentes son aut¶onomos y esa cualidad se re° eja en el hecho de que ninguno va a sufrir modi¯ caciones en su base de conocimiento como consecuencia de una acci¶on ejecutada por otro agente. Sin embargo, todos los miembros del grupo pueden modi¯ car el conocimiento compartido. M¶asa¶un, cada agentemantienela consistencia entresu propio conocimiento y el conocimiento compartido, pero no puede controlar la consistencia entre el conocimiento de los dem¶as agentes y el conocimiento compartido. La interacci¶on social requiere que cada agente se comunique con los dem¶as antes de ejecutar una acci¶on que puede afectar las creencias del grupo.
Los agentes tienen una actitud colaborativa, ofrecen su conocimiento y sus habilidades a los dem¶as integrantes del grupo e intentan evitar que sus acciones perjudiquen a los dem¶as. Cada uno de ellos puede solicitar colaboraci¶on proponiendo la ejecuci¶on de una acci¶on espec¶³¯ ca o solicitando conocimiento necesario para realizar ¶el mismo una acci¶on.
3.1.
N egociaci¶on de cr eencias
Cuando un agente a1requiere de un literal h y no puede encontrar una garant¶³a para
¶el a partir de las bases de conocimiento K1 y ©c , ni elaborar una secuencia de acciones
que le permitan agregarlo a su conjunto de creencias, puede solicitar colaboraci¶on de otro miembro del grupo. Un agente a2 recibe entonces unapropuestade a1 respecto al literal h. En el caso m¶as simple a2 conoce h y la solicitud puede atenderse en forma directa
agregando h al conocimiento compartido y noti¯ cando a a1.
Ej emplo 3.2 Consideremos el conocimiento compartido©c y las bases de conocimiento
propias dea1 y a2, K1= (©1; ¢1) y K2= (©2; ¢2) respectivamente:
©c= f ag
©1= f b; dg
©2= f e; » f g
¢1= f (p| < b); (q| < a; b; e)g ¢2= f (v | < a; » f ); (w| < g)g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f dg; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f ggà ¡ f a; eg; not f gA2
El agentea1necesitaepara poder construir un argumento sin derrotadores que soporte
a q y realiza una solicitud a a2. El literal est¶a dentro del conocimiento propio dea2 de
modo que la respuesta es inmediata. El conocimiento compartido ser¶a entonces:
©c0= f a; eg
Si el grupo est¶a integrado ¶unicamente por dos agentes y uno de ellos puede satisfacer una propuesta sin ejecutar ninguna acci¶on, la modi¯ caci¶on de ©c no va a provocar
con-° ictos, ya que el ¶unico literal que se agrega es justamente el que se solicit¶o. Si el grupo es m¶as numeroso, puede haber con° icto con las creencias de otros integrantes del grupo.
Un agente puede solicitar un literal para construir una garant¶³a, como en el ejemplo anterior, o porque este forma parte de las precondiciones de alguna acci¶on que necesita ejecutar.
Ej emplo 3.3 Consideremos el conocimiento compartido©c y las bases de conocimiento
propias dea1 y a2, K1= (©1; ¢1) y K2= (©2; ¢2) respectivamente:
©c= f ag
©1= f b; d; eg
©2= f » f ; gg
¢1= f (p| < b); (q| < a; b; c; s); (r | < d); (s| < e)g ¢2= f (v | < a; » f ); (w| < j )g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f e; g; r g; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f j gà ¡ f a; gg; not f gA2
El agentea1 necesitacpara poder construir un argumento sin derrotadores que
sopor-te a qy su razonamiento le indica que si ejecutaraA1 el literal c se agregar¶³a a ©1. Sin
embargo, una de las precondiciones de A1 no se satisface. El literal epertenece a ©1, el
argumento Aa1= f (r | < d)gsostiene a r, pero su conocimiento no le permite garantizar g. Realiza entonces una propuesta a a2 solicitando g. El literal est¶a dentro del
conoci-miento propio dea2 de modo que la respuesta es inmediata. El conocimiento compartido
ser¶a nuevamente:
©c0= f a; gg
©20= f » f g
El agentea1 puede ejecutar ahoraA1 de modo quec se agregue a©1 y el argumento
Aa2= f (q| < a; b; c; s),(s| < e)g sostenga a q.
Si a1 solicita h y el literal no pertenece a ©2, a2 intenta ejecutar una acci¶on que
le permitan agregar h al conjunto de creencias compartidas. Si tiene ¶exito, modi¯ ca ©c agregando h.
Ej emplo 3.4 Dadas©c y las bases de conocimiento propias dea1 y a2, K1= (©1; ¢1) y
K2= (©2; ¢2) de¯ nidas como sigue:
©c= f ag
©1= f b; dg
©2= f e; » f ; gg
¢1= f (p| < b); (q| < c; d)g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f a; j g; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f j gà ¡ f a; g; sg; not f gA2
El agentea1 necesitaqpero no es capaz de construir un argumento que lo soporte. Su
razonamiento le dice que puede ejecutar A1, de modo que c se agregue a ©1, pero para
hacerlo necesitaj. Solicitaj aa2, y este decide ejecutar la acci¶on A2 para agregar j a©c.
Notemos que las precondiciones de A2 son los literales a, g, y s. Los dos primeros
pertenecen a ©c y ©2 respectivamente. El agentea2 construyeAb1= f (s| < a; t), (t | < e)g
que es un argumento paras. Ab1 es derrotado por Ab2= f (» t | < v), (v| < » f )gque ataca
at. PeroAb2 es derrotado por Ab3= f (» v| < g)g. As¶³, sest¶a garantizado porque est¶a
so-portado por el argumentoAb1, que s¶olo tiene un derrotador Ab2, que a su vez es derrotado
por Ab3 y este ¶ultimo no tiene derrotadores.
Luego de quea2 ejecuteA2 el conocimiento compartido se modi¯ ca:
©c0= f a; j g
Ahora, a1 puede ejecutar A1, generar ©10= f b; c; dg y construir un argumentoAa2=
f (q| < c; d) g que soporte a q. Aa2 no tiene contrargumentos que lo derroten, de modo
queqest¶a garantizado.
Con frecuencia la labor de a2 no va a limitarse a hallar una acci¶on simple que le
permita agregar h a ©c. Para satisfacer la propuesta de a1, el agente va a tener que hallar
un plan en el cual h sea una de las poscondiciones de la ¶ultima acci¶on de la secuencia.
Ej emplo 3.5 Dadas©c y las bases de conocimiento propias dea1 y a2, K1= (©1; ¢1) y
K2= (©2; ¢2) de¯ nidas como sigue:
©c= f ag
©1= f b; dg
©2= f » f ; gg
¢1= f (p| < b); (q| < c; d)g
¢2= f (r | < a; » f ); (s| < a; t); (t | < e)g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f a; j g; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo:
f j g A2
à ¡ f a; g; sg; not f g
f egà ¡ f gg; not f gA3
Como antes, el agente a1 necesita qpero no es capaz de construir un argumento que
lo soporte y solicita j aa2. Este ¶ultimo no es capaz de obtener j a trav¶es de la ejecuci¶on de una ¶unica acci¶on, pero elabora una plan cuya primera acci¶on, A3, le va a permitir
agregar ea sus creencias. Ahora, Ab1= f (s| < a; t), (t | < e)ggarantiza s y se satisfacen
las precondiciones que le permiten ejecutar A2.
Luego de quea2 ejecuteA2 el conocimiento compartido se modi¯ ca como en el ejemplo
anterior, y a1 puede ejecutar A1, generar ©10= f b; c; dg y construir un argumento sin
El agente a2 puede fallar en su intento de satisfacer la propuesta de a2 respecto a h,
pero en el proceso puede identi¯ car a alg¶un literal k que de estar garantizado permitir¶³a hacerlo. En este caso, a2 puede realizar una contrapropuesta, solicit¶andole k a a1. Si a1
es capaz de construir un plan que le permita alcanzar k, agrega k en el conocimiento compartido. En cualquier caso, a1 se comunica con a2 para noti¯ car el resultado de la
interacci¶on.
3.2.
Efect os colat er ales
Como vimos, las acciones ejecutadas para cambiar el mundo pueden modi¯ car la base de conocimiento compartido y producir as¶³ efectos colaterales no previstos. En efecto, a1 solicit¶o colaboraci¶on de a2 con la intenci¶on de ejecutar ¶el mismo una acci¶on A1. Sin
embargo, probablemente h no sea la ¶unica precondici¶on de A1, en cuyo caso ninguna
de las acciones ejecutadas por a1 o a2 deber¶³an modi¯ car el mundo, provocando que las
precondiciones garantizadas dejaran de estarlo.
Ej emplo 3.6 Dadas ©c y las bases de conocimiento propias de a1 y a2, K1= (©1; ¢1)
K2= (©2; ¢2) de¯ nidas como sigue:
©c= f a; bg
©1= f d; eg
©2= f » f ; gg
¢1= f (p| < a); (q| < d; » w); (» w| < b; j )g ¢2= f (r | < a; » f )g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f eg; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f j ; » bgà ¡ f a; gg; not f gA2
Si a1 necesita q, el argumento Aa1= f (q| < d; » w),(» w| < b; j)g podr¶³a sostenerlo,
pero a1 no puede construir una garant¶³a para j y solicita colaboraci¶on a a2. a2 tampoco
es capaz de construir directamente un argumento que soporte a j a partir de K2, pero
puede ejecutar A2, de modo tal quej se transforme en un hecho. Pero ahora, despu¶es de
ejecutarseA2, el conocimiento compartido se modi¯ ca no s¶olo para agregar j y satisfacer
la propuesta dea1, sino tambi¶en porquebse remueve.
©c0= f a; » b; j g
El agente a1 hab¶³a solicitado j para construir una garant¶³a para q, pero para ello
tambi¶en necesitaba b, que ahora no forma parte del conocimiento compartido.
Una situaci¶on similar se produce si a1realiza una propuesta a a2 solicitando un literal
h que necesita para ejecutar una acci¶on espec¶³¯ ca. La interacci¶on no resultar¶a ventajosa para a1, si para atender la propuesta a2 modi¯ ca el conocimiento compartido afectando
Ej emplo 3.7 Dadas ©c y las bases de conocimiento propias de a1 y a2, K1= (©1; ¢1)
K2= (©2; ¢2) de¯ nidas como sigue:
©c= f a; bg
©1= f d; eg
©2= f » f ; gg
¢1= f (p| < a); (q| < d; » w); (» w| < c)g ¢2= f (r | < a; » f )g
¡1 el conjunto de acciones disponibles paraa1 conteniendo: f cgà ¡ f b; e; j g; not f gA1
¡2 el conjunto de acciones disponibles paraa2 conteniendo: f j ; » bgà ¡ f a; gg; not f gA2
Como antes, a1 necesitaq. El argumentoAa1= f (q| < d; » w),(» w| < c)gpodr¶³a
sos-tener aq, peroa1 necesita entonces ejecutar A1. La acci¶on requiere aj como precondici¶on
y a1 solicita colaboraci¶on a a2. a2 tampoco es capaz de construir directamente un argu-mento que soporte aj a partir deK2, pero puede ejecutar A2y agregar j a©c. Despu¶es de
ejecutarseA2, el conocimiento compartido se modi¯ ca, porque se agregaj y se remueveb.
El agentea1hab¶³a solicitadoj con la intenci¶on de ejecutar A1, pero ahora la precondici¶on
bya no forma parte del conocimiento compartido.
Para evitar que sus acciones perjudiquen a a1, cuando su actitud es justamente
cola-borar con ¶el, a2 puede comunicarle a a1 su intenci¶on de agregar o remover un literal de
©c, adem¶as del especi¯ cado en la propuesta. La comunicaci¶on puede pensarse como una
cont r apr opuest a, tendiente a asegurar el bene¯ cio mutuo.
Cuando a1recibe la contrapropuesta, analiza si la modi¯ caci¶on en el mundo que plan-tea a2 provoca alg¶un con° icto con su propio conocimiento o con la acci¶on que piensa
realizar. En cualquier caso, se comunica con a2 para aceptar o rechazar la
contrapropues-ta. Si a1 acepta la contrapropuesta, a2 ejecuta la secuencia de acciones que le permiten
agregar h al conocimiento compartido y vuelve a comunicarse para indicar el ¶exito de su tarea.
Si el grupo incluye a otros agentes, todos tienen que estar de acuerdo para que el conocimiento compartido se modi¯ que.
4.
El pr ot ocolo de negociaci¶on
La negociaci¶on puede pensarse como un proceso de b¶usqueda distribuida sobre un espacio de acuerdos potenciales. En la mayor¶³a de los casos s¶olo hay una porci¶on del espacio de b¶usqueda que satisface las expectativas de cada agente particular.
La negociaci¶on produce un di¶alogo en el cual las partes interesadas intercambian infor-maci¶on hasta llegar a un acuerdo. El proceso contiene entonces elementos decomunicaci¶on
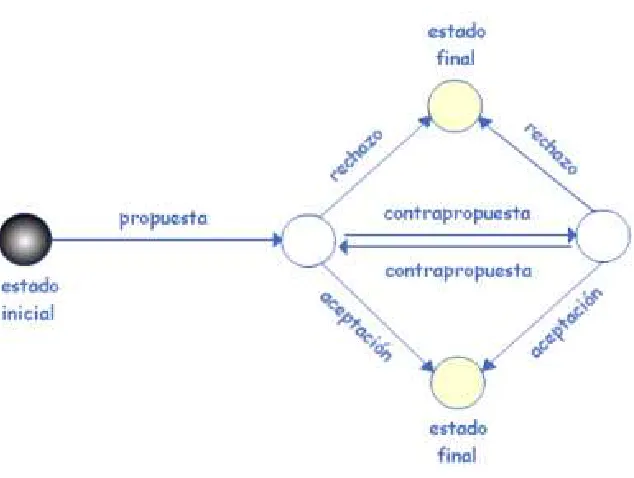
Figura 1: Protocolo Dial¶ogico
Un agente realiza una propuesta dentro del espacio de acuerdos aceptables. Otro miem-bro del grupo recibe la solicitud y puede aceptarla, rechazarla o realizar una contrapro-puesta. En este ¶ultimo caso el primer agente la analiza y nuevamente puede aceptar, rechazar o realizar una contrapropuesta.
La aceptaci¶on indica que se ha alcanzado un punto de acuerdo compartido. El rechazo implica que la negociaci¶on termin¶o sin ¶exito. En el proceso, es posible que uno o ambos participantes tengan que ceder y hacer algunas concesiones, pero si se llega a un esta-do ¯ nal de aceptaci¶on, el acueresta-do debe ser favorable para ambos. La ¯ gura 1 ilustra el protocolo de negociaci¶on de dos agentes colaborativos.
Bajo esta met¶afora la negociaci¶on requiere que los agentes tengan ciertas capacidades m¶³nimas:
Realizar una propuesta dentro del espacio de situaciones aceptables.
Aceptar o rechazar una propuesta
Elaborar una contrapropuesta
Ambos participantes est¶an interesados en alcanzar un acuerdo, tienen una actitud cooperativa y son capacesdecomunicarse. Cuanta m¶asinformaci¶on brindecada contrapro-puesta, m¶as ¶agil puede llegar a ser el proceso y antes puede terminar la negociaci¶on.
Las principales habilidades del coordinador son:
Identi¯ car a un agente id¶oneo para satisfacer una propuesta
Detectar y manejar con° ictos
Terminar el di¶alogo
La terminaci¶on de la interacci¶on puede producirse cuando hay aceptaci¶on, rechazo sin contrapropuesta o el coordinador considera que no tiene sentido continuar.
5.
Conclusiones y t r abaj o fut ur o
Un agente racional elabora y ejecuta planes con la intenci¶on de lograr sus metas. La cons-trucci¶on de un plan considera las creencias del agente acerca del mundo y su ejecuci¶on puede modi¯ carlas. Este trabajo parti¶o de un modelo de plani¯ caci¶on basado en argumentaci¶on, que saca provecho de un formalismo reconocido de Programaci¶on en L¶ogica Rebatible.
El conocimiento de un agente es incompleto y con frecuencia resulta insu¯ ciente para elaborar un plan que le permita concretar sus metas. Cuando forma parte de una co-munidad puede solicitar colaboraci¶on de los dem¶as miembros del grupo. La interacci¶on puede provocar con° ictos entre las creencias, pero si la actitud es cooperativa los agentes intentar¶an llegar a un acuerdo mediante un proceso de negociaci¶on.
La negociaci¶on puede pensarse como un proceso de b¶usqueda distribuida sobre un es-pacio de acuerdos potenciales. En nuestra propuesta la b¶usqueda no se realiza si-guiendo un esquema convencional sino a trav¶es de un mecanismo dial¶ectico, basado en argumen-taci¶on. Los ejemplos presentados ilustran diferentes situaciones de negociaci¶on y algunas de las di¯ cultades que pueden producirse.
La intervenci¶on de cada agente en el di¶alogo provoca un cambio en la direcci¶on de la b¶usqueda. Al comenzar el proceso uno de los participantes especi¯ ca la porci¶on del espacio de b¶usqueda que le resulta favorable. En general, cuanta m¶as informaci¶on brinde cada participante, m¶as restringido queda el espacio de acuerdos y m¶as e¯ ciente es el proceso. El trabajo futuro estar¶a orientado en este sentido.
La interacci¶on entrelosagentespodr¶³a mejorar considerablementesi el contexto brinda-ra algunas convenciones que permitiebrinda-ran establecer acuerdos genebrinda-rales acerca del lenguaje, el signi¯ cado y el comportamiento. Estas convenciones simpli¯ car¶³an el proceso de deci-si¶on de cada agente porque reducir¶³an la incertidumbre respecto al comportamiento de los dem¶as y eliminar¶³an con° ictos de signi¯ cado.
Algunas convenciones tomar¶an el car¶acter denormasque estructuran las interacciones y obligan a los agentes a actuar de acuerdo a ellas. El sistema se transformar¶a entonces en una organizaci¶on, en la cual cada agente tiene un comportamiento aut¶onomo pero restringido.
Refer encias
[1] Simari, G., Garc¶³a, A.,Actions and Arguments: Preliminaries and Examples, Proce-edings of the VII Congreso Argentino en Ciencias de la Computaci¶on, Universidad Nacional de la Patagonia San Juan Bosco, El Calafate, Argentina ISBN 987-96-288-6-1, 273-283, 2001
[2] Garc¶³a, A.Defeasible Logic Programming: De¯ nition, Operational Semantics and Pa-rallelism, PhD thesis, Computer Science Department, Universidad Nacional del Sur, Bah¶³a Blanca, Argentina. 2000,
[3] Garc¶³a, A., Simari, G., Parallel Defeasible Argumentation, Journal of Computer Science and Technology Special Issue: Arti¯ cial Intelligence and Evolutive Compu-tation. Vol 1, Number 2, 45-57, 1999
[4] Garc¶³a, A., Simari, G., Ches~nevar C., An argumentative framework for reasoning with inconsistent and incomplete information, Workshop on Practical Reasoning and Rationality 13th biennal European Conference on Arti¯ cial Intelligence (ECAI-98) 1998
[5] Fagin, R., Halpern J., Moses, Y., Vardi, M. Reasoning About Knowledge, The MIT Press, Cambridge, MA 1995.
[6] Wooldridge, M. and Jennings, N.,Intelligent agents: Theory and Practice., The Kno-wledge Engineering Review 10,pp.115-152, 1995.
[7] Jennings, N.R, Parsons, S., Noriega, P., Sierra, C. On Argumentation-Based Nego-tiation Proc. Int. Workshop on Multi-Agent Systems, Boston, USA. 1998
[8] Jennings, N., Sycara, K., Wooldridge, M., A Roadmap of Agent Research and Deve-lopment, Autonomous Agents and Multi-Agent Systems, 1, pp.275-306, 1998.
[9] Rao, A. S., and George®M. P.,BDI Agents: From Theory to PracticeProceedings of the First International Conference on Multi-Agent Systems (ICMAS-95) pp.312-319 San Francisco, USA, 1995.
[10] Wooldridge, M., Intelligent Agents, in Multiagent Systems: A Modern Approach to Distributed Arti¯ cial Intelligence, G. Weiss (Ed.), The MIT Press, pp. 27{ 78,1999.
[11] Huhns, M., Stephens, L.,Multiagent Systems and Societies of Agents, TheMIT Press, 1999.
[12] MÄuller, J.,Negotiation Principles, Foundations of Distributed Arti¯ cial Intelligence, John Wiley and Sons, 1996.
[13] Kalenka, S., Jennings, N., Socially Responsible Decision Making by Autonomous Agents, Proceedings of 5th Int. Colloq. on Cognitive Science, Eds. Korta, K., So-sa, E., Arrazola, X. pp.153-169, 1999.