I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFECIONAL “ADOLFO LÓPEZ
MATEOS”
“
PROCEDIMIENTO DE CONFIGURACIÓN PARA LA
IMPLEMENTACIÓN DE PRÁCTICAS DE CONTROL
DIFUSO TIPO MAMDANI EN EL PLC COMPACT LOGIX
DE LA SERIE 1768-L43
”
T E S I S
QUE PARA OBTENER EL GRADO DE:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTA
FERNÀNDEZ ORTEGA LUIS ALBERTO
ASESORES:
DRA. BLANCA MARGARITA OCHOA GALVÁN ING. EDGAR MAYA PÉREZ
Índice general
1. Introducción 1
1.1. Título . . . 1
1.2. Objetivo general . . . 1
1.3. Objetivos particulares . . . 1
1.4. Justi…cación . . . 2
1.5. Estado del arte . . . 2
2. Marco teórico 4 2.1. Control clásico . . . 4
2.1.1. Breve revisión histórica. . . 4
2.1.2. Algunas de…niciones y conceptos básicos . . . 5
2.1.3. Componentes básicos de un sistema de control. . . 6
2.1.4. Realimentación . . . 6
2.1.5. Sistemas de control en lazo cerrado. . . 8
2.1.6. Sistemas de control en lazo abierto. . . 10
2.1.7. Sistemas de control en lazo cerrado en comparación con sistemas en lazo abierto. . . 11
2.2. Controlador lógico programable . . . 12
2.2.1. Estructura básica del PLC . . . 13
2.2.2. PLC: CPU . . . 14
2.2.3. Memoria interna del PLC . . . 15
2.2.4. Memoria del programa . . . 16
2.2.5. Entrada/salida . . . 17
2.2.6. Entradas/salidas analógicas . . . 18
2.2.8. Ciclo de operación del PLC . . . 18
2.2.9. Allen Bradley . . . 20
2.2.10. RSlogix 5000 . . . 20
2.3. Fundamentos de Lógica difusa . . . 22
2.3.1. Las redes neuronales y sistemas de lógica difusa . . . 22
2.3.2. Fundamentos de enfoque difusos . . . 23
2.3.3. Conjuntos difusos . . . 24
2.3.4. Términos básicos . . . 25
2.4. Control difuso . . . 26
2.4.1. Introducción . . . 26
2.4.2. Controlador lingüístico difuso . . . 26
2.4.3. Variables de entrada . . . 27
2.4.4. Variables de salida . . . 28
2.4.5. Reglas If / Then e Inferencia . . . 28
2.4.6. Métodos de defusi…cación . . . 32
3. Con…guración y generación de algoritmos para PLC de un control difuso. 35 3.1. Con…guración de RSLogix 5000 (nuevo proyecto) . . . 35
3.1.1. Alta de tarjetas de entradas/salidas . . . 40
3.2. Con…guración de tarjetas analógicas . . . 43
3.3. Comunicación entre PLC y computadora (RSlinx). . . 49
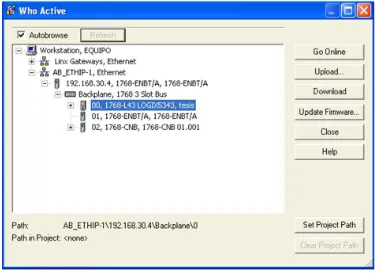
3.4. Descargar un programa al PLC . . . 53
3.5. FuzzyDesigner . . . 55
3.5.1. Comandos básicos para la implementación de control difuso . . . 55
3.5.2. Ingreso y modi…cación de funciones de membresía . . . 61
3.5.3. Ingreso de las reglas if/then. . . 64
4. Aplicación e implementación del control difuso por PLC 65 4.1. Motor de corriente directa . . . 65
4.1.1. Modelo en variables de estado de un motor de corriente directa. . . . 65
4.1.2. Diseño de control difuso utilizando tres funciones de membresía. . . . 67
4.1.3. Diseño de control difuso utilizando cinco funciones de membresía. . . 70
4.2. Implementación de controlador difuso (tres funciones de membresía). . . 74
4.2.1. Inserción de bloques. . . 74
4.2.3. Generación de reglas if/then (bloque reglas) . . . 90
4.3. Implementación de controlador difuso (cinco funciones de membresía). . . 97
4.3.1. Inserción de bloques. . . 97
4.3.2. Con…guración de funciones de membresía (entradas y salida). . . 98
4.3.3. Generación de reglas if/then para controlador con cinco funciones de membresía (bloque reglas) . . . 101
4.4. Generación de algoritmo en diagrama de escalera para controlador difuso. . . 103
4.4.1. Direccionamiento del controlador . . . 103
Índice de …guras
2.1. Componentes básicos de un sistema de control. . . 6
2.2. Componentes de un sistema de control en lazo cerrado. . . 8
2.3. Componentes de un sistema de control en lazo abierto. . . 10
2.4. PLC compact logix de la serie 1768-l43. . . 21
2.5. Estructura básica de un controlador de lógica difusa. . . 27
2.6. Valores comunes para las variables de error, error, y u a escala en el universo de discurso. . . 29
2.7. Un algoritmo difuso en forma tabular. . . 30
2.8. Evaluación de tres reglas de control al tiempo t=k utilizando la implicación min de Mamdani y la interpretación min de AND (DOF) . . . 32
2.9. Los tres métodos de defusi…cación: center of area (COA), center of sums (COS) y mean of maxima (MOM). . . 34
3.1. RS Logix 5000. . . 36
3.2. Nuevo proyecto. . . 36
3.3. Datos para nuevo controlador. . . 37
3.4. Controlador 1768-L43. . . 37
3.5. Selección de revisión. . . 38
3.6. Ingreso de nombre del proyecto. . . 38
3.7. RSLogix 5000 al concluir con la selección y nombramiento del controlador a emplear. . . 39
3.8. Agregar nuevo módulo. . . 40
3.9. Selección de nuevo módulo. . . 41
3.10. Selección de tarjeta de entradas analógicas. . . 41
3.11. Con…guración de tarjeta analógica. . . 42
3.13. Vista de las cuatro tarjetas ya con…guradas. . . 43
3.14. Ventana de tarjeta analógica. . . 43
3.15. Con…guración tarjetas analógicas. . . 44
3.16. Con…guración rango de voltaje. . . 45
3.17. Con…guración tipo de dato. . . 45
3.18. Con…guración de límites de unidades de ingeniería. . . 46
3.19. Límites de 10000 a 10000. . . 46
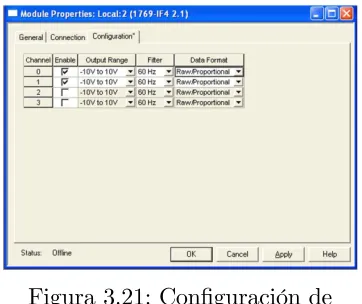
3.20. Ventana de con…guración de entradas analógicas. . . 47
3.21. Con…guración de tarjeta de entradas analógicas. . . 47
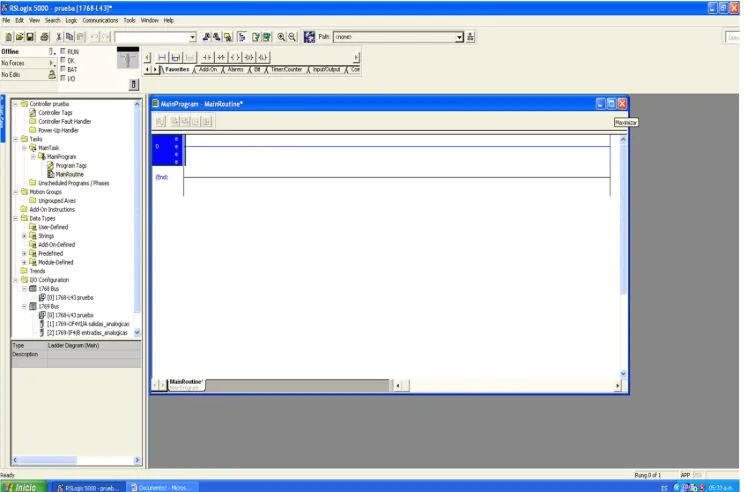
3.22. MainProgram . . . 48
3.23.Área de trabajo (MainRoutine). . . 48
3.24. Red de área local. . . 49
3.25. Ingreso de IP correspondiente al PLC. . . 50
3.26. RSLinx Classic. . . 50
3.27. Con…guración de controladores. . . 51
3.28. Selección del controlador. . . 51
3.29. Asignación de nombre para el controlador. . . 52
3.30. Controlador. . . 52
3.31. Visualización de controlador (running). . . 53
3.32. Controladores activos. . . 53
3.33. Descarga de programa. . . 54
3.34. Who Active. . . 54
3.35. Pasar a modo run. . . 55
3.36. Ventana de con…guración del puerto de entrada. . . 56
3.37. Ventana de con…guración del puerto de salida. . . 56
3.38. Ventana de con…guración de bloque de variables lingüísticas de entrada. . . 57
3.39. Con…guración del rango del bloque de variables lingüísticas de entrada. . . . 58
3.40. Visualización de términos del bloque de variables lingüísticas de entrada. . . 58
3.41. Ventana de con…guración del bloque de reglas if/then. . . 59
3.42. Pestaña links de bloque de reglas if/then. . . 60
3.43. Ventana de con…guración del bloque de variables lingüísticas de salida. . . . 61
3.44. Ventana de con…guración de funciones de membresía. . . 61
3.45. Propiedades de función de membresía (fusi…cación). . . 62
3.47. Ventana de con…guración de funciones de membresía de salida. . . 63
3.48. Propiedades función de membresía de salida (defusi…cación). . . 63
3.49. Ventana de con…guración e ingreso de reglas if/then. . . 64
4.1. Simulación en simulin (Motor de corriente continua). . . 67
4.2. Comportamiento del motor (tres funciones de membresía). . . 68
4.3. Funciones de membresía (E) (tres funciones): . . . 69
4.4. Funciones de membresía ( E) (tres funciones): . . . 70
4.5. Funciones de membresía de salida (tres funciones). . . 70
4.6. Comportamiento del motor (cinco funciones de membresía). . . 71
4.7. Funciones de membresía (E) (cinco funciones): . . . 72
4.8. Funciones de membresía ( E) (cinco funciones): . . . 73
4.9. Funciones de membresía de salida (cinco funciones). . . 73
4.10. Puerto de lectura error. . . 74
4.11. Puerto de lectura derivada del error. . . 74
4.12. Bloque de variables lingüísticas de entrada (error). . . 75
4.13. Bloque de variables lingüísticas de entrada (derivada del error). . . 75
4.14. Lin entre puerto de entrada y bloque de variables lingüisticas (error). . . 76
4.15. Lin entre puerto de entrada y bloque de variables lingüisticas (derivada del error). . . 76
4.16. Bloque reglas. . . 77
4.17. a) Lin entre bloque de reglas y bloque de variables lingüísticas. . . 77
4.18. b) Lin entre bloque de reglas y bloque de variables lingüísticas. . . 78
4.19. Vista de lins entre puertos de entrada, bloques de variables lingüísticas y bloque de reglas. . . 78
4.20. Bloque de funciones de membresía de salida (acción de control). . . 79
4.21. Puerto de salida (Voltaje). . . 79
4.22. Lin: Bloque de reglas y bloque de variables lingüísticas de salida. . . 80
4.23. Lin entre bloque de variables lingüísticas de salida (acción de control) y puerto de salida (voltaje). . . 80
4.24. Esquema completo del controlador difuso. . . 81
4.25. Propiedades de bloque. . . 82
4.26. Rango de la gra…ca para funciones de membresía (error). . . 82
4.28. Función de membresía E con…gurada. . . 84
4.29. Propiedades de función de membresía CE. . . 84
4.30. Función de membresía CE con…gurada. . . 85
4.31. Propiedades de función de membresía PO. . . 85
4.32. Funciones de membresía E, CE y PO para la entrada error con…guradas. . 86
4.33. Rango de la grá…ca para funciones de membresía (derivada del error). . . 87
4.34. Funciones de membresía E, CE y PO para la entrada derivada del error con…guradas. . . 88
4.35. Rangos del bloque de variables lingüísticas de salida (acción de control). . . . 89
4.36. Funciones de membresía DI, A y AU del bloque acción de control. . . 89
4.37. Ventana de con…guración de reglas if/then. . . 90
4.38. a)Generación de la primer regla para el motor. . . 91
4.39. b)Generación de la primer regla para el motor. . . 92
4.40. c)Generación de la primer regla para el motor. . . 92
4.41. Vista de las nueve reglas para el motor. . . 93
4.42. Variación de entrada al controlador. . . 93
4.43. Comportamiento del controlador difuso. . . 94
4.44. Generación de instrucción AddOn. . . 95
4.45. Guardado de instrucción AddOn. . . 95
4.46. Importar instrucción AddOn. . . 96
4.47. Selección de archivo a importar. . . 96
4.48. Con…guración de importación. . . 97
4.49. Controlador difuso ya importado. . . 97
4.50. Funciones de membresía, E, EM, CE, POM y PO con…guradas (error). . 99
4.51. Funciones de membresía, E, EM, CE, POM y PO con…guradas (derivada del error). . . 100
4.52. Funciones de membresía DI, DIP, A, AUP y AU del bloque acción de control.101 4.53. Reglas de controlador difuso con cinco funciones de membresía. . . 102
4.54. Controlador difuso, diagrama en escalera. . . 103
4.55. Selección tipo de data para el tag motor. . . 104
4.56. Tags. . . 104
4.57. Bloque de multiplicación. . . 105
4.58. Bloque de división. . . 106
Capítulo 1
Introducción
1.1. Título
Procedimiento de con…guración para la implementación de prácticas de control difuso tipo Mamdani en el PLC Compact Logix de la serie 1768L43.
1.2. Objetivo general
Realización de prácticas para el empleo de algoritmos de control difuso en el PLC Com
pact Logix 5000 de la serie 1768L43.
1.3. Objetivos particulares
1. Con…guración y aplicación del software FuzzyDesigner para el diseño de un control difuso.
2. Con…guración y programación del PLC Compact Logix empleando el software de FuzzyDesigner.
1.4. Justi…cación
Se pretende implementar el algoritmo utilizando lógica difusa, empleando el PLC Allen Bradley compact Logix 5000 de la serie 1768L43, con el …n de comprobar la calidad y
‡exibilidad que puede adquirir un sistema , así mismo la e…ciencia del funcionamiento del mismo. De este modo se realizará el proyecto buscando validar que tan factible y fácil puede ser realizar éste tipo de programación, para el …n establecido en la realizacion de estas prácticas.
Así mismo se realizará el proyecto ya que hasta el momento no se ha realizado la inte
gración de la lógica difusa con un PLC de la serie anteriormente mensionada, buscando una implementación adecuada de los conceptos de la lógica difusa.
1.5. Estado del arte
El interes de la lógica difusa parte de la posibilidad de tolerancia para algunas inexacti
tudes e imprecisiones, haciendo una analogía con el razonamiento humano para la resolución de problemas. Las tareas que se realizan cotidianamente, con mucha frecuencia estan cimen
tadas en la evaluación de reglas, las cuales se aprenden mediante la experiencia.
En la actualidad la creciente demanda de sistemas mas e…cientes y rápidos ha impulsado a que sistemas generados por lógica difusa sean cada vez más comunes y solicitados, dandole así un impulso para su crecimiento y aplicación en diversos ramos del control moderno.
A continuación, se presentan algunos trabajos relacionados a control difuso, realizados en los últimos años dentro del Instituto Politécnico Nacional.
Control difuso de velocidad de un motor de corriente directa.[12]
En este trabajo se presenta el análisis y diseño de un control de velocidad para un motor de corriente directa empleando un control difuso. Esto con el …n de observar las características que presenta dicho control de velocidad utilizando un modelo no lineal.
Los resultados son comparados con el control convencional PI sintonizado por el método de ZiglerNichols.
Desarrollo de una tarjeta para el control difuso de velocidad de un motor de corriente contínua basado en el paquete fudge.[13]
En este trabajo se presenta el diseño y construcción de un sistema de control de velocidad difuso para un motor de corriente contínua, mediante el micro controlador 68HC11.
variables difusas, el error, la derivada del error y la señal de control. El proceso de evaluación de reglas emplea los algoritmos de inferencia minmax, utilizando una matriz de asociación
difusa (FAM) de 7x7. La generación de la variable de salida real es mediante el método del centroide o centro de gravedad (COG).
Algunas aplicaciones de lógica difusa a teoría del control.[14]
Los conceptos en los cuales se basa la lógica difusa son expuestos en esta tesis. Se muestra su aplicación en la identi…cación y el control difuso de sistemas. En el control difuso de un motor de cd se hizo una comparación con el controlador convencional proporcionalintegral
derivativo (PID), asi mismo se presenta el control de un pendulo invertido.
Implementación de control difuso de un DSP (procesador digital de señales).[15]
El diseño de un control difuso para la velocidad de un motor de corriente directa (CD) implementado en un procesador digital de señales (DSP). Adicionalmente se diseñó e im
plementó un control de velocidad neurodifuso con el propósito de comparar y conocer otros controladores dentro de la inteligencia computacional.
El primer algoritmo se basa en los principios de la lógica difusa, mientras que el segundo es una combinación de 2 metodologías, redes neuronales y lógica difusa, dando por resultado un algoritmo neurodifuso.
Control difuso de velocidad tipo Mamdani de un motor de cd auto sintonizable por algoritmos genéticos.[16]
Capítulo 2
Marco teórico
2.1. Control clásico
El control automático ha desempeñado un papel vital en el avance de la ingeniería y la ciencia. Además de su gran importancia en los sistemas de vehículos espaciales, de guiado de misiles, robóticos y análogos, el control automático se ha convertido en una parte importante e integral de los procesos modernos industriales y de fabricación.
Como los avances en la teoría y la práctica del control automático proporcionan los medios para conseguir un comportamiento óptimo de los sistemas dinámicos, mejorar la productividad, simpli…car el trabajo de muchas operaciones manuales repetitivas y rutinarias, así como de otras actividades, la mayoría de los ingenieros y cientí…cos deben tener un buen conocimiento de este campo.
2.1.1. Breve revisión histórica.
El primer trabajo signi…cativo en control automático fue el regulador de velocidad cen
trífuga de James Watt para el control de la velocidad de una máquina de vapor, en el siglo XVIII. En 1922, Minorsky trabajo en controladores automáticos para el guiado de embarca
ciones, y mostró que la estabilidad puede determinarse a partir de las ecuaciones diferenciales que describen el sistema. En 1932, Nyquist diseñó un procedimiento relativamente simple para determinar la estabilidad de sistemas en lazo cerrado. En 1934, Hazen, analizó el diseño de los servomecanismos con relé, capaces de seguir con precisión una entrada cambiante.
Durante la década de los cuarenta, los métodos de la respuesta en frecuencia (especial
cerrado que cumplieran los requisitos de comportamiento. A …nales de los años cuarenta, se desarrollo por completo el método del lugar de las raíces propuesto por Evans.
Los métodos de respuesta en frecuencia y del lugar de las raíces, que forman el núcleo de la teoría de control clásica, conducen a sistemas estables que satisfacen un conjunto más o menos arbitrario de requisitos de comportamiento. Desde el …nal de la década de los cincuenta, el énfasis en los problemas de diseño de control se ha desplazado del diseño de uno de los posibles sistemas que funciona adecuadamente al diseño de un sistema óptimo respecto de algún criterio.
Hacia 1960, debido a la disponibilidad de los computadores digitales fue posible el análisis en el dominio del tiempo de sistemas complejos. La teoría de control moderna, basada en el análisis en el dominio del tiempo y la síntesis a partir de variables de estados, se ha desarrollado para manejar la creciente complejidad de las plantas modernas y los requisitos cada vez más exigentes sobre precisión, peso y coste en aplicaciones militares, espaciales e industriales.
Las aplicaciones recientes de la teoría de control moderna incluyen sistemas fuera del ámbito de las ingenierías, tales como los sistemas biológicos, biomédicos, económicos y so cioeconómicos.
2.1.2. Algunas de…niciones y conceptos básicos
Variable controlada y variable manipulada. La variable controlada es la cantidad o
condición que se mide y controla; esta se debe mantener dentro de algún valor deseado. La variable manipulada es la cantidad o condición que el controlador modi…ca para afectar el valor de la variable controlada. Normalmente, la variable controlada es la salida del sistema. Controlar signi…ca medir el valor de la variable controlada del sistema y aplicar la variable manipulada al sistema para corregir o limitar la desviación del valor medido respecto del valor deseado.
Plantas. Una planta puede ser una parte de un equipo, tal vez un conjunto de los
elementos de una máquina que funcionan juntos, y cuyo objetivo es efectuar una operación particular.
Sistemas. Es una combinación de componentes que actúan juntos y realizan un obje
tivo determinado. El concepto de sistema se puede aplicar a fenómenos tanto físicos como abstractos y dinámicos.
de un sistema. Si la perturbación se genera dentro del sistema se denomina interna, mientras que una perturbación externa se genera fuera del sistema y es una entrada.
2.1.3. Componentes básicos de un sistema de control.
Los componentes básicos de un sistema de control son los siguientes (…gura 2.1): 1. Objetivos de control.
2. Componentes del sistema de control. 3. Resultados o salidas.
Resultados
Objetivos
Sistema de
control
Figura 2.1: Componentes básicos de un sistema de control
Dentro de los componentes primarios que se manejan, de igual modo se pueden presentar de la siguiente manera los componentes básicos de un sistema de control (para un sistema en lazo cerrado):
1. Sensor, que también se conoce como elemento primario.
2. Transmisor, el cual se conoce como elemento secundario.
3. Controlador, que es el cerebro del sistema de control.
4. Elemento …nal de control, frecuentemente se trata de una válvula de control
aunque no siempre. Otros elementos …nales de control comúnmente utilizados son las bobinas de velocidad variable, los transportadores y motores eléctricos.
Los objetivos se pueden identi…car como entradas, o señales actuantesu, y los resultados también se llaman salidas, o variables controladas, y en general, el objetivo de un sistema de control es controlar las salidas en alguna forma prescrita mediante las entradas a través de los elementos del sistema.
2.1.4. Realimentación
La realimentación es para reducir el error entre la entrada de referencia. En general, se puede establecer que cuando una secuencia cerrada de relaciones causaefecto existe entre
Efecto de la realimentación en la ganancia global.
El efecto general de realimentación en un sistema de control es que puede incrementar o disminuir la ganancia.
Efecto en la estabilidad.
La estabilidad es una noción que describe si un sistema es capaz de seguir el comando de entrada, o en general, si dicho sistema es útil. En una forma rigurosa, un sistema se dice estable si sus salidas salen de control. Se debe establecer que la realimentación puede originar que un sistema que es originalmente estable, se convierta en inestable. Evidentemente, la realimentación es un arma de dos …los; cuando no se usa adecuadamente, puede ser dañina. Se puede demostrar que una de las ventajas de incorporar realimentación es que puede estabilizar un sistema inestable.
Efecto en sensibilidad.
A menudo, las consideraciones sobre sensibilidad son importantes en el diseño de sistemas de control.Ya que todos los elementos físicos tienen propiedades que cambian con el ambiente
y la edad, no se pueden considerar a los parámetros de un sistema de control completamente estacionarios durante la vida de operación de un sistema.
En general, un buen sistema de control debe ser inestable a la variación de los parámetros pero sensible a los comandos de entrada (Control realimentado).
Se re…ere a una operación que, en presencia de perturbaciones, tiende a reducir la difer
encia entre la salida de un sistema y alguna entrada de referencia, y lo realiza tomando en cuenta esta diferencia.
Sistemas de control realimentados.
Un sistema que mantiene una relación determinada entre la salida y la entrada de ref
erencia, comparándolas y usando la diferencia como medio de control, se denomina sistema de control realimentado. Un ejemplo sería el sistema de control de temperatura de una habitación. Midiendo la temperatura real y comparándola con la temperatura de referen
Los sistemas de control realimentados no se limitan a la ingeniería, sino que también se encuentran en diversos campos ajenos a ella.
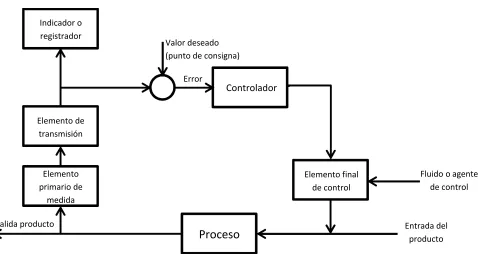
2.1.5. Sistemas de control en lazo cerrado.
Los componentes de un sistema de control en lazo cerrado se pueden visualizar en la …gura 2.2.
Proceso
Elemento final de control Elemento primario de medida Elemento de transmisión Indicador o registrador Controlador ErrorFluido o agente de control
Entrada del producto Salida producto
[image:18.612.85.563.255.509.2]Valor deseado (punto de consigna)
Figura 2.2: Componentes de un sistema de control en lazo cerrado.
Proceso.Se de…ne como una operación o un desarrollo natural progresivamente contín
uo, marcado por una serie de cambios graduales que se suceden unos a otros de una forma relativamente …ja y que conducen a un resultado o propósito determinados; o una operación arti…cial o voluntaria que se hace de forma progresiva que consta de una serie de acciones o movimientos controlados, sistemáticamente dirigidos hacia un resultado o propósito deter
minado.
Valor deseado (punto de consigna). Como el nombre lo dice es el valor que se desea
Indicador o registrador. Disponen de un indicador y escala sobre la que puede leerse el valor de la variable. Registran grá…camente la evolución de la variable.
Controlador. Comparan la variable controlada (presión, nivel, temperatura) con un
valor deseado y ejercen una acción correctiva de acuerdo con la desviación. El controlador compara el valor objetivo y la lectura realizada por el sistema del parámetro a controlar, actuando en consecuencia.
Error. Es la desviación que presentan las medidas prácticas de una variable de proceso con relación a las medidas teóricas o ideales, como resultado de las imperfecciones de los aparatos y de las variables parásitas que afectan al proceso. Es decir:
Error = valor leído en el instrumento – valor ideal de la variable medida
Elemento …nal de control. Generalmente válvulas. Recibe la señal del controlador y mod
i…ca las acciones de control.
Elemento primario de medida. Mejor conocidos como sensores; dispositivo capaz de
detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transfor
marlas en variables eléctricas. Con estos y los transmisores se realiza la operación de medición en el sistema de control. En el sensor se produce un fenómeno mecánico, eléctrico o similar, el cual se relaciona con la variable de proceso que se mide. Éstos siempre están en contacto con la variable que se mide.
Elemento de transmisión. Son instrumentos que captan la variable de proceso y la
transmiten a distancia a un instrumento receptor indicador, registrador, controlador o una combinación de estos.
Existen barios tipos de señales de transmisión; neumáticas, electrónicas, digitales, hidráuli
cas y telemétricas. De las cuales las más empleadas son las tres primeras.
Lo que hace falta en el sistema de lazo abierto para que sea más exacto y más adaptable es una conexión o retroalimentación desde la salida hacia la entrada del sistema. Para obtener un control más exacto, de la señal controlada y debe ser realimentada y comparada con la entrada de referencia.
de control realimentado para reducir el error del sistema.
Tipos de sistemas de control realimentados.
Los sistemas de control realimentados se pueden clasi…car en diversas formas, dependi
endo del propósito de la clasi…cación. Por ejemplo, de acuerdo con el método de análisis y diseño, se clasi…can en lineales y no lineales, variantes con el tiempo o invariantes con el tiempo. De acuerdo con el tipo de señales usadas en el sistema, se hace referencia a sistemas en tiempo contínuo y en tiempo discreto, o sistemas modulados y no modulados. A menudo, los sistemas de control se clasi…can de acuerdo con su propósito principal. Por ejemplo, un sistema de control de posición y un sistema de control de velocidad controlan las variables de salida de acuerdo como su nombre lo indica.
2.1.6. Sistemas de control en lazo abierto.
Los sistemas en los cuales la salida no tiene efecto sobre la acción de control se denominan sistemas de control en lazo abierto. En otras palabras, en un sistema de control en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada.
Como ya se mencino en cualquier sistema de control en lazo abierto, la salida no se compara con la entrada de referencia. Así, a cada entrada de referencia le corresponde una condición de operación …ja; como resultado de ello, la precisión del sistema depende de la calibración. Ante la presencia de perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada. En la práctica, el control en lazo abierto solo se usa si se conoce la relación entre la entrada y la salida y si no hay perturbaciones internas ni externas. Es evidente que estos sistemas no son de control realimentado. Obsérvese que cualquier sistema de control que opere con una base de tiempo esta en lazo abierto.véase …gura 2.3.
Controlador Proceso Elemento de
transmisión Indicador o registrador Elemento primario de medida Valor deseado o
punto de consigna.
Los elementos de un control en lazo abierto se pueden dividir en dos partes: el controlador y el proceso controlado:
Las ventajas fundamentales de los sistemas de control en lazo abierto son las siguientes: 1. Construcción simple y facilidad de mantenimiento.
2. Menos costosos que el correspondiente sistema en lazo cerrado. 3. No hay problemas de estabilidad.
4. Convenientes cuando la salida es difícil de medir o cuando medir la salida de manera precisa no es económicamente viable.
Las desventajas fundamentales de los sistemas de control en lazo abierto son:
1. Las perturbaciones y los cambios en la calibración originan errores, y la salida puede ser diferente de lo que se desea.
2. Para mantener la calidad requerida en la salida, es necesaria la recalibración de vez en cuando.
2.1.7. Sistemas de control en lazo cerrado en comparación con
sistemas en lazo abierto.
Una ventaja del sistema de control en lazo cerrado es que el uso de la realimentación vuelve la respuesta del sistema relativamente insensible a las perturbaciones externas y a las variaciones internas en los parámetros del sistema.
Desde el punto de vista de estabilidad, el sistema de control en lazo abierto es más fácil de desarrollar, porque la estabilidad del sistema no es un problema importante. Por otra parte, la estabilidad es un gran problema en el sistema de control en lazo cerrado, que puede conducir a corregir en exceso errores que producen oscilaciones de amplitud constante o cambiante.
2.2. Controlador lógico programable
El controlador lógico programable (PLC) es la plataforma de computadora de factor es
tándar empleada en aplicaciones de control industrial, automatización de fabricas, máquinas automatizadas y control de proceso. Los PLC se desarrollaron como resultado de una necesi
dad en la industria automotriz. A principios de la década de 1960, General Motors (GM) declaró que los sistemas de automatización de fabricas basados en paneles lógicos de rele
vadores alambrados no eran lo su…cientemente ‡exible para las necesidades cambiantes de la industria. Cuando un modelo nuevo requería una secuencia diferente de lógica de control, volver a alambrar los páneles de control tomaba mucho tiempo y el tiempo de respuesta de la compañía era lento para los nuevos modelos. Con páneles lógicos de relevadores alambra
dos, si hay necesidad de cambiar la lógica de automatización y las funciones de una línea, el alambrado lógico entre las señales de entrada y de salida en el panel tiene que cambiarse físicamente. Este es un proceso prolongado y costoso. Se pidió en una especi…cación de diseño que se dispusiera de un alambrado de propósito general en un panel de todos los disposi
tivos de entrada/salida, pero que la relación lógica entre la entrada/salida se de…niera en los software en lugar de ser alambrada. En otras palabras, se deseaba que la lógica estuviera en el software en lugar de alambrada. Este fue el inicio de los controladores lógicos program
ables (PLC), los cuales tienen una función muy importante en las fábricas automatizadas del mundo industrial. Los PLC reemplazaron a los páneles lógicos de relevadores alambrados. La tendencia actual es la operación en red a gran escala entre los PLC en una fábrica y los niveles de empresas, los cuales pueden estar físicamente distribuidos alrededor del mundo.
El primer PLC del mundo fue realizado por Bedford Associates, éste fue el MODICON 084.
la CPU y de la función del programa, los PLC se pueden categorizar en cuatro tamaños principales. Cualquiera de los módulos de interfaz de entrada/salida se puede conectar en las ranuras. Todas las líneas de potencia de la interfaz y unitarias se proporcionan por conexión por presión en el bastidor. Las unidades de entrada/salida comunes soportadas por casi cualquier plataforma del PLC incluyen módulos discretos de entradas y salidas, módulos analógicos de entrada/salida, módulos temporizadores a alta velocidad, módulos de comunicación Serial, módulos de interfaz de la red de comunicación (es decir DiviceNet, CAN, Pro…Bus), módulos de control de servomotor y módulos de control de motor paso a paso. Para una aplicación dada, las unidades de entrada salida necesarias se seleccionan e insertan en la ranura. Además, si la aplicación requiere cambiarse, se pueden agregar módulos de entrada/salida simplemente insertándolos en las ranuras disponibles en el bastidor principal o en el bastidor de expansión. Cada modulo de entrada/salida ocupa un numero …nito de memorias en el espacio de la memoria de los PLC.
Los PLC son similares a las computadoras, pero tienen características especí…cas que permiten su empleo como controladores. Estas características son:
1. Son robustos y están diseñados para resistir vibraciones, temperatura, humedad y ruido.
2. La interface para las entradas y las salidas esta dentro del controlador.
3. Es muy fácil programarlo, así como entender el lenguaje de programación. La programación básicamente consiste en operaciones de lógica y conmutación.
2.2.1. Estructura básica del PLC
Dentro de la estructura básica del PLC se pueden tomar en cuenta los siguientes bloques: Unidad central de procesamiento (CPU).
Memorias internas. Memoria de programa. Interfaces de entrada/salida. Fuente de alimentación.
La CPU consulta el estado de las entradas y recoge de la memoria de programa la secuencia de instrucciones a ejecutar, elaborando a partir de ella las señales de salida u órdenes que se enviarán al proceso.
La memoria del autómata contiene todos los datos e instrucciones que necesita para ejecutar la tarea de control.
La memoria interna es la encargada de almacenar datos internos de cálculo y variable internas que no aparecen directamente sobre las salidas.
La memoria de programa contiene la secuencia de operaciones que deben realizarse so
bre las señales de entrada para obtener las señales de salida, así como los parámetros de con…guración del autómata.
Las interfaces de entradas y salidas establecen la comunicación del autómata con la planta. Para ello, se conectan, por una parte, con las señales de proceso a través de los bornes previstos y, por otra, con el bus interno del autómata. La interfaz se encarga de adaptar las señales que se utilizan en el proceso a las utilizadas internamente por la máquina.
La fuente de alimentación proporciona, a partir de una tensión exterior, las tensiones necesarias para el buen funcionamiento de los distintos circuitos electrónicos del sistema.
Se conoce como bus interno al conjunto de líneas y conexiones que permiten la unión eléctrica entre la unidad de control, las memorias y las interfaces de entrada salida. Un bus se compone de un conjunto de hilos o pistas utilizadas para intercambiar datos u órdenes.
2.2.2. PLC: CPU
La CPU controla y procesa todas las operaciones dentro del PLC. Cuenta con un tempo
rizador cuya frecuencia típica es entre 1 y 8 MHz. Esta frecuencia determina la velocidad de operación del PLC y es la fuente de temporización y sincronización de todos los elementos del sistema. Un sistema de bases lleva información y datos desde y hacia la CPU, la memoria y las unidades de entrada/salida. Los elementos de la memoria son: una ROM para guardar en forma permanente la información del sistema operativo y datos corregidos; una RAM para el programa del usuario y memoria bu¤er temporal para los canales de entrada/salida. El usuario puede modi…car los programas en la RAM. Sin embargo, para evitar que estos programas se pierdan durante la interrupción del suministro de energía eléctrica, en el PLC se utiliza una batería, para mantener el contenido de la RAM durante un periodo. Una vez elaborado un programa y guardado en la RAM, se puede cargar en un chip de memoria EPROM para que quede guardado de manera permanente.
Como se menciono anteriormente el CPU es el encargado de ejecutar el programa de usuario y de ordenar las transferencias de información en el sistema de entradas/salidas.
de programación, monitores, otros PLC u ordenadores, etcétera.
Para ejecutar el programa, la CPU adquiere sucesivamente las instrucciones una a una desde la memoria, y realiza las operaciones especi…cadas en las mismas.
El funcionamiento es, salvo escasas excepciones, de tipo interpretado, con decodi…cación de las instrucciones cada vez que son ejecutadas.
Esta codi…cación puede realizarse mediante un sistema de lógica estándar con micro
procesador más memoria, o puede estar microprogramada por hardware (cableada) en el propio procesador, según diseño de propio fabricante.
En algunas ocasiones la decodi…cación se realiza con la ayuda de una memoria exterior (intérprete), de la que pueden existir distintas versiones dentro de una misma familia de PLC ofreciendo una amplia gama de posibilidades como:
Modi…cación del lenguaje de programación. Tratamiento de señales analógicas.
Manipulación de textos.
Algoritmos de control en lazo cerrado, etcétera.
2.2.3. Memoria interna del PLC
Es aquella que almacena el estado de las variables que maneja el PLC: entradas, salidas, contadores, relés internos, señales de estado, etcétera.
La memoria interna, de longitud invariable para cada modelo de PLC, …ja sus caracterís
ticas funcionales en cuanto a capacidad de direccionamiento E/S, número y tipo de variables internas manipuladas.
Por esta razón, la clasi…cación de la memoria interna no se realiza atendiendo sus carac
terísticas de lectura y escritura, sino por el tipo de variables que almacena y el número de bits que ocupa la variable. Así, la memoria interna del PLC queda clasi…cada en las siguientes:
Posiciones de 1 bit (bits internos) Memoria imagen de entradas/salidas. Relés internos.
Relés especiales/auxiliares.
Posiciones de 8, 16 o mas bits (registros internos) Temporizadores.
Contadores.
Las variables contenidas en la memoria interna pueden ser consultadas y modi…cadas continuamente por el programa.
Esta actualización contínua de los datos obliga a construir la memoria con dispositivos RAM.
El área de memoria imagen almacena las últimas señales leídas en la entrada y enviadas a la salida, actualizándose tras cada ejecución completa del programa.
Después de ejecutar el programa, la CPU ordena el intercambio de señales entre las interfaces E/S y la memoria imagen, de manera que, mientras dura la ejecución, los estados de las señales de entrada considerados para el cálculo no son los actuales de planta, sino los presentes en la memoria imagen leídos en el ciclo anterior.
De la misma manera, los resultados obtenidos en los cálculos no van directamente a la interfaz de salida sino a la memoria imagen, realizándose la transferencia global de todas las señales (lectura de entradas y escritura de salidas) cuando …naliza cada ejecución del programa.
2.2.4. Memoria del programa
Normalmente externa y enchufable a la CPU, almacena el programa escrito por el usuario para su aplicación. Adicionalmente puede contener datos alfanuméricos y textos variables, y también información parametrizada sobre el sistema.
Cada instrucción del usuario ocupa un paso o instrucción del programa y necesita, nor
malmente, para ser almacenada, dos posiciones de memoria de semiconductor (dos bytes).
Las memorias de usuarios son siempre de tipo permanente RAM + batería o EPROM/EEPROM. Estas memorias no volátiles se suministran como cartuchos enchifables al PLC (memory
packs) en el zócalo previsto en la CPU, o como tarjetas de memoria a conectar en el bastidor, ocupando una posición del mismo.
La ejecución del programa en el módulo es siempre prioritaria, de forma que si se da tensión al autómata con un módulo conectado, la CPU ejecuta su programa y no el de la memoria RAM.
El conjunto de direcciones correspondientes a todas las posiciones de memoria que puede direccionar la CPU (la memoria de trabajo), se denomina mapa de memoria cuya longitud depende de tres factores:
La longitud de memoria de usuario utilizada.
2.2.5. Entrada/salida
Los tipos más comunes de entrada/salida empleados en aplicaciones de PLC son entradas y salidas de tipo discretas (dos estados: ON/OFF). La entrada discreta puede ser el estado conductor o no conductor (ON/OFF) de un componente de ca o cd del circuito. De igual manera la salida puede ser la activación (ON) o desactivación (OFF) de un componente de un circuito.
La unidad de entradas/salidas es la interface entre el sistema y el mundo externo. Para introducir programas en esta unidad se usa un tablero, que puede variar de un pequeño teclado con pantalla de cristal líquido, a los que usan unidades de presentación visual.
Los canales de entrada/salida proporcionan funciones para el acondicionamiento y ais
lamiento de señales, lo que permite concentrarlos directamente a sensores y actuadores, sin necesidad de otros circuitos. Los voltajes de entrada comunes son 5 V y 24 V.
Los voltajes comunes de salida son 24 V y 240 V. La especi…cación del tipo de las salidas generalmente es de tipo relevador, tipo transistor o tipo triac. En el tipo relevador, la señal de la salida del PLC se utiliza para operar un relevador; por lo que éste es capaz de conmutar corrientes del orden de unos pocos amperes en un circuito externo. El relevador aísla al PLC del circuito externo, y se emplea tanto para la conmutación de cd como de ca. En la salida tipo transistor se utiliza un transistor para conmutar corriente a través de un circuito externo. Usando la convección de la dirección del ‡ujo de corriente de positivo a negativo un dispositivo de salida recibe la corriente de un módulo de salida y lo que se conoce como drenado de corriente (sinking), la corriente ‡uye del módulo de salida hacia la carga y esto se conoce como suministro de corriente (sourcing). Los optoaisladores se usan con transistores de conmutación para lograr el aislamiento entre los circuitos externos y el PLC. La salida tipo transistor solo se utiliza en la conmutación de cd. Las salidas tipo triac se usan para controlar cargas eternas que se conectan a la fuente de alimentación de ca. En este caso también se emplean optoaisladores.
Los módulos de entrada/salida del PLC proporcionan el mismo tipo de interfaz de en
2.2.6. Entradas/salidas analógicas
Es frecuente encontrar sensores que producen señales analógicas, así como actuadores que requieren señales analógicas. Por ello, algunos PLC deben contar con módulos para conver
sión de señales analógicas a digitales en los canales de entrada, y un modulo para conversión de señales digitales a analógicas en los canales de salida. Estas salidas proporcionan una corriente que puede ser de 4 a 20 mA la cual es la más común.
2.2.7. Fuente de alimentación
Un PLC esta formado por bloques que requieren niveles de tensión y de potencia diferentes y que, además, están sometidos a condiciones ambientales de ruido electromagnético también distintas.
Por todo ello es frecuente que la alimentación se obtenga de varias fuentes separadas, procurando independizar las siguientes partes del circuito:
Unidad central e interfaces E/S (alimentación PLC). Alimentación de entradas.
Alimentación de salidas (cargas) de tipo electromagnético.
La alimentación a la CPU puede ser de continua a 24 V CC, o en alterna a 110/220 V CA. En cualquier caso la CPU alimenta las interfaces conectadas a través del bus interno.
La alimentación de circuitos E/S puede realizarse en alterna a 48/110/220 VCA o en contínua a 12/24/48 VCC.
La fuente de alimentación del PLC puede incorporar una batería tampón, que se utiliza para el mantenimiento de algunas posiciones internas (relés y registros) y del programa del usuario en memoria RAM, cuando falla la alimentación o se desconecta el PLC. La capacidad de esta batería, normalmente a 3,5 V, oscila entre los 1500 mAh y 1 año de vida para las más pequeñas utilizadas en los autómatas compactos, y los 5000mAh y 10 años de vida en las necesarias en autómatas modulares de gama alta.
2.2.8. Ciclo de operación del PLC
Antes de entrar en el ciclo de operación el PLC realiza una serie de acciones comunes, que tratan fundamentalmente de inicializar los estados del mismo y de checar el hardware.
Estas rutinas de chequeo, incluidas en el monitor ROM, comprueban: El bus de conexión de las unidades de E/S.
El nivel de la batería, si ésta existe.
La conexión de las memorias internas del sistema. El modulo de memoria exterior conectado, si existe.
Si se encuentra algún error en el chequeo, se activa el led de error y queda registrado el código del mismo. El funcionamiento puede quedar interrumpido en ese punto, según la gravedad del error.
Comprobando las conexiones, se inicializan las variables internas:
Se ponen a OFF las posiciones de memoria interna (excepto las mantenidas o protegidas contra perdidas de tensión).
Se borran todas las posiciones de memoria imagen E/S.
Se borran todos los contadores y temporizadores (excepto las mantenidas o prote
gidas contra perdidas de tensión).
Toda esta rutina se ejecuta en un tiempo menor a un segundo.
Transcurrida la secuencia de inicialización, y si no han aparecido errores, el autómata entra en el ciclo de operación, constituido por aquellas operaciones que se ejecutan continu
amente. Este ciclo se puede dividir en tres secciones: Proceso común.
Ejecución del programa. Servicio a periféricos.
En el primero se comprueba el reloj de guarda y realizan los chequeos cíclicos de conex
iones y de memoria de programa, protegiendo al sistema contra errores de hardware (conex
iones de I/O, ausencia de memoria de programa, etcétera), errores de sintaxis.
El reloj de guarda (watchdog) es un temporizador interno que …ja el tiempo máximo de ejecución de un ciclo de operación. Si alcanza el tiempo máximo pre…jado, entre 0.1 y 0.5 segundos, el PLC pasa al estado stop y se ilumina el indicador de error.
El chequeo cíclico de conexiones comprueba los siguientes puntos: Niveles de la tensión de alimentación.
Estado de la batería.
En el chequeo de la memoria de programa se comprueban la integridad de la misma y los posibles errores de sintaxis y gramática.
En el segundo bloque de operaciones, ejecución del programa, se consultan y actualizan los estados de las entradas y las salidas y se elaboran órdenes de mando a partir de ellos, por ejecución secuencial de las instrucciones del programa.
El tercer bloque de operaciones dentro de un ciclo de ejecución, el servicio a periféricos, solo es atendido si hay pendiente algún intercambio con el exterior.
Estos periféricos se comunican con el autómata bien directamente, a través de un conector situado sobre la CPU, bien a través de procesadores de comunicación especí…cos, que soportan los protocolos de comunicación descargando a la unidad de control de esta tarea.
Una vez establecida la comunicación, la CPU dedica un tiempo limitado, de 1 a 2 ms, en atender el intercambio de datos. Si este tiempo no fuera su…ciente, el servicio queda interrumpido hasta el siguiente ciclo.
2.2.9. Allen Bradley
AllenBradley es el nombre de marca de una línea de equipo de automatización de fábrica,
fabricados por Rockwell Automation (NSE ROK). La empresa, con ingresos de aproximada
mente US$ 4.5 millones en 2006, fabrica controladores lógicos programables (PAC, PLC), interfaces hombremáquina , sensores, componentes y sistemas de seguridad , software, con
tactores, centros de control de motores y sistemas y otros productos similares. Rockwell Automation también proporciona servicios de gestión de activos incluyendo reparación y consultoría. La see de Rockwell Automation se encuntra en Milwaukee, WI.
2.2.10. RSlogix 5000
Como una de las tecnologías fundamentales de la Arquitectura IntegradaTM, Logix ofrece un enfoque único para la automatización una sola plataforma de control con una máquina
de control y entorno de desarrollo expresamente diseñado para ofrecer capacidades de clase mundial para cualquier disciplina de automatización.
RSLogix 5000 es una plataforma de software que:
Puede utilizarse para aplicaciones de base discreta, de proceso, de lote, de movimien
to, de seguridad y de variadores.
Es compatible con la familia escalable de controladores programables de automati
Permite fragmentar la aplicación en programas más pequeños que pueden volver a utilizarse, rutinas e instrucciones que pueden crearse al utilizar distintos lenguajes de progra
mación: diagrama de lógica de escalera, diagrama de bloque de funciones, texto estructurado y diagrama de funciones secuenciales.
Incluye un conjunto extenso de instrucciones incorporadas que usted puede aumen
tar al crear sus propias instrucciones addon de…nidas por el usuario.
Permite escribir la aplicación sin tener que preocuparse de la con…guración de la memoria.
Proporciona la capacidad de crear tipos de datos de…nidos por el usuario para representar fácilmente componentes especí…cos de la aplicación en una estructura.
Incorpora datos y los comparte con otros productos de software de Rockwell Au
tomation para reducir drásticamente el tiempo de entrada de datos, proporcionar auditorías y facilitar el manejo de códigos y su uso repetido.
La codi…cación de documentación es más simple y rápida.
El aprendizaje es fácil porque cuenta con extensos cursillos y ayudas en línea ex
haustivas.
Permite importar y exportar la totalidad del proyecto, o componentes y secciones de código, para editarlos con herramientas de otros fabricantes y para poder compartirlos fácilmente.
Permite distintos niveles de seguridad y protección de propiedad intelectual.
Características de PLC compact logix de la serie 1768-L43
Figura 2.4: PLC compact logix de la serie 1768l43.
para aplicaciones de pequeño y mediano tamaño que requieren seguridad, movimiento y / o comunicaciones complejas. Ellos usan el mismo software de programación (RSLogix TM 5000), que otros controladores Logix usan, por lo que fácilmente puede duplicar y ampliar los programas existentes para ejecutar en las plataformas compact GuardLogix y Compact
Logix. Esta serie de controladores ofrecen integrado, EtherNet / IP o canales ControlNet y modulo de comunicaciones DeviceNet TM. Soportan hasta 30 módulos I/O y hasta 16 ejes de movimiento.
Características
Le permite controlar I/O distribuidas mediante EtherNet / IP, ControlNet o DeviceNet Apoyo a una interconexión con el control y recopilación de datos en la misma red Apoyo SIL 3, PLe integrado
Permitir la edición en línea, forzando y otras actividades de seguridad estándar Integración con módulos 1769 Compact I / O
Proporciona puerto serial integrado
Ofrecer opciones de memoria de usuario que van de 2 MB a 3 MB Certi…caciones
Controladores CompactLogix: cULus, CE, CTick, KC
2.3.
Fundamentos de Lógica difusa
2.3.1. Las redes neuronales y sistemas de lógica difusa
En la historia de la ciencia y la tecnología, los avances a menudo provienen de observa
ciones realizadas desde una perspectiva diferente. Interrelación que damos por sentado hoy en día no puede haber sido tan evidente en las décadas anteriores.
Tanto los estadísticos y los ingenieros eléctricos han encontrado que el análisis de las ‡uctuaciones en las variables de procesos proporciona información útil acerca de las variables, así como el proceso en cuestión. Estas ‡uctuaciones, que resultan en incertidumbres en las variables de medida, a menudo están causadas por algún tipo de función de conducción al azar (es decir, la turbulencia del ‡uido, desequilibrio de rotación, etc.)
linealidades; pensamos en complejidad como una característica de los sistemas de descripción, es decir, en relación con los medios de cálculo o lenguaje, y no solamente la naturaleza complicada de un sistema). En los sistemas difusos las entradas y salidas de las variables están codi…cadas en representaciones difusas, mientras que sus relaciones toman formas bien de…nidas por las reglas si/entonces (if/then). La observación ingeniosa de Zadeh de que la búsqueda acrítica de precisión puede ser no sólo innecesaria, sino en realidad una fuente de error, lo llevó a la noción de un conjunto difuso.
Los sistemas de lógica difusa frente a la imprecisión de las variables de entrada y de salida directamente al de…nir entonces con números difusos (y los conjuntos difusos) que se pueden expresar en términos lingüísticos (por ejemplo, caliente fría, y caliente), permiten una mayor ‡exibilidad en la formulación de descripciones del sistema en el nivel apropiado de detalle. La tolerancia tiene mucho que ver con la parsimonía, y por lo tanto la precisión y la e…ciencia de una descripción. Esto signi…ca que el comportamiento complejo del proceso puede ser descrito en términos generales sin de…nir con precisión los complejos fenómenos implicados (usualmente no lineales).
2.3.2. Fundamentos de enfoque difusos
Los fundamentos matemáticos de lógica difusa decaen en la teoría de conjuntos difusos, los cuales pueden ser considerados como una generalización de la teoría de conjuntos clásica. Consideremos, por ejemplo, el conjunto de sillas en una habitación. En la teoría de conjuntos el conjunto de sillas apunta a todos los objetos en una habitación haciendo la pregunta, ¿Es una silla? En la teoría de conjuntos clásica se nos permite usar sólo dos respuestas: Sí o No, si lo codi…camos como1 y 0. Por lo tanto, nuestras respuestas serán en
el par f0;1g, si la respuesta es 1, un elemento pertenece al conjunto; Si la respuesta es 0,
no lo hace. Al …nal, tomamos todos los objetos cuya etiqueta es 1 y obtenemos el conjunto de sillas en una habitación. Supongamos, sin embargo, que nos hacemos la pregunta, ¿Cual de los objetos de una habitación puede funcionar como una silla? Una vez más podemos señalar a todos los objetos y preguntar, ¿Podría funcionar como una silla? La respuesta demasiado concreta podría limitarse a f0;1g. Sin embargo, el conjunto de objetos en una
su uso pueden variar con diferentes personas, circunstancias y propósitos, depende de las características especí…cas de una situación. Decimos, pues, que el conjunto de objetos que pueden funcionar como una silla es un conjunto difuso, en el sentido de que no puede haber criterios claramente de…nidos para decidir la militancia en el conjunto. Los objetos como escritorios, cajas, y parte de la planta puede funcionar como sillas, hasta cierto punto. Cabe señalar, sin embargo, que no hay nada confuso acerca de los objetos materiales: las sillas, cajas y escritorios son lo que son.
2.3.3. Conjuntos difusos
En la teoría de conjuntos clásica hay un sentido bastante estricto de pertenencia a un conjunto, es decir, un elemento o bien pertenece o no pertenece al conjunto. En 1965 Lot… A. Zadeh introdujo conjuntos difusos. En los conjuntos difusos se permite a miembros con cierto grado de pertenencia (membresía). El grado de pertenencia a un conjunto está indicado por un número en el intervalo[ ;1. El punto de partida de los conjuntos difusos es simplemente
generalizar el conjunto de valoración del par de números( ;1)para todos los números que se
encuentran en[;1. El punto de partida de los conjuntos difusos es simplemente generalizar
el conjunto de valoración del par de números( ;1)para todos los números que se encuentran
en[;1. Por esta valoración antes prevista entre el intervalo [ ;1la función es alterada y la
llamaremos función de pertenecía o membresía denotada por A( ):
(x):X !
[;1 (2.1)
Las funciones de membresía son una herramienta matemática simple pero versátil para indicar la composición ‡exible a un conjunto. La pregunta importante aquí es, ¿Cómo se asigna el valor de la función de membresía? Se puede decir simplemente que las funciones de pertenencia son principalmente de carácter subjetivo, lo que no signi…ca que se les asigna ar
bitrariamente, sino más bien sobre la base de criterios especí…cos de la aplicación (Kaufmann, 1975; Dubois y Prade, 1980, Zimmermann, 1985).
Hay dos formas de uso común de denotar los conjuntos difusos. Si X es un universo de
discurso y es un elemento particular de X, entonces un conjunto difuso A de…nido en X
A=f( !A())g;2" (2.2)
Donde cada par ( ; A( )) se llama singleton y tiene en primer lugar, seguido por su pertenencia a un A( ). En el conjunto nítido un singleton es simplemente el elemento por
sí mismo. En los conjuntos difusos un singleton son dos cosas: y A( ):
A=f(1;1;# $;% &;1;# $;% ';#;7));%*;#;)$;%);#;'$;%+;#;'$;% 7; ;# ,);%.;#;1)g (2.3)
2.3.4. Términos básicos
Muchas operaciones de conjuntos difusos como la intersección y la unión se de…nen me/
diante los operadores m2n(^) y ma (_). Min y max son análogas a las del producto ( ) y
suma (+) en el álgebra.
m2n(^) y ma (_) puede ser utilizado para seleccionar el mínimo y el máximo de dos
elementos, por ejemplo, &^' = &; o &_' = ': También podemos escribir m2n% &;'$ = &,
o ma % &;'$ = '. Formalmente, el mínimo de dos elementos
1 y 2 denotado ya sea como
m2n(
1; 2);o 2_ 1 se de…ne como:
1 ^ 2 =34 5%
1; 2) =
(
1 2ii
1 2
2 2ii
1 > 2
)
(2.4)
Del mismo modo el máximo de dos elementos 1 y 2, denotado como ma(
1; 2) o
1_ 2 se de…ne como:
1_ 2 =3689 %
1; 2) =
(
1 2ii
1 2
2 2ii
1 < 2
)
Conjunto difuso vacío
Un conjunto difuso se llama vacío (indicado como; =<) si su función de pertenencia es
cero en todas partes es su universo de discurso =, es decir:
; Ø>?
A(@) =<;8 2= (2.6)
Donde "8@2="indica la notación abreviada "para cualquier elemento @ en=".
Conjuntos difusos normales
Un conjunto difuso es llamado normal si hay al menos un elemento @0 en el universo de
discurso donde su función de pertenencia es igual a uno, es decir,
A(@0) = 1 (2.7)
2.4. Control difuso
2.4.1. Introducción
El control difuso se re…ere principalmente al control de los procesos a través de descripB
ciones lingüísticas difusas. Desde 1974, cuando E. H. Mamdani y S. Assilian (Mamdani, 1974) demostraron que las reglas difusas if / then podían regular un modelo de máquina de vapor, un gran número de aplicaciones de control difuso se han desplegado con éxito.
2.4.2. Controlador lingüístico difuso
Figura 2.5: Estructura básica de un controlador de lógica difusa
La estructura básica de un controlador de lógica difusa se describe en la …gura 2.5. El hecho de que los dispositivos de medición den mediciones nítidas y que los actuadores requieran entradas nítidas, requiere dos consideraciones adicionales cuando las descripciones lingüísticas se emplean para …nes de control: fusi…car la entrada del regulador y defusi…car su salida. La fusi…cación se puede lograr a través de un núcleo fusi…cador, y la defusi…cación se puede lograr a través de los procedimientos especiales que seleccionan un valor representativo nítido de la salida difusa.
Los controladores difusos operar en intervalos de tiempo discretos. Las reglas se evalúan a intervalos regulares en la misma forma que en el control digital convencional, con varias reglas que se están ejecutando en conjunto (en paralelo) dentro del mismo intervalo de tiempo. Esta función paralela permite desarrollar muy diversos algoritmos difusos.
2.4.3. Variables de entrada
La variable LHS más común en control difuso es el error, e. En cualquier momentot =k el error se de…ne como:
e(k) r y(k) (2.8)
es la diferencia entre el error y el error presente en el paso anterior de tiempo t =k 1, es decir,
e(k) e(k) e(k 1) (2.9)
2.4.4. Variables de salida
Las variables RHS puede ser cualquier variable directamente manipulada. Una variableu RHS difusa, se pueden de…nir en el universo del discurso de una variable manipulada nítida. u indica el grado de cambio de la variable u de control en el instante t = k, es decir, el cambio en la acción. Por lo tanto, si la salida defusi…cada en el instante k es u (k), las salidas totales nítidas del controlador serán:
u(k) =u(k 1) + u (k) (2.10)
2.4.5. Reglas If / Then e Inferencia
A menudo, pero no siempre, las variables LHS y RHS se escalan al mismo universo de discurso y poseen valores difusos que tienen la misma forma. Como ejemplo, considerar los valores difusos para las variables de error, error, y uque se muestran en la …gura 2.6 en conexión con un controlador difuso que emula el modo derivativo de un controlador convenC
cional (Sugeno, 1985; Mizumoto, 1988). Los valores difusos más comunes son los siguientes:
NB = negativo grande NM = medio negativo NS = negativo pequeño ZE = cero
Figura 2.6: Valores comunes para las variables de error, error, y ua escala en el universo de discurso
Todas las variables comparten el mismo universo de discurso que oscila entreD6 y 6 como
se muestra en la …gura 2.6. Los valores difusos se almacenan en una tabla de 7 X 13, con cada …la de la tabla que representa un valor cuanti…cado difuso. El algoritmo difuso de un controlador que emula un modo derivado se compone de las siguientes reglas si / entonces:
R1: if error is NB AND error is ZE then u is PB ELSE
R2: if error is NM AND error is ZE then u is PM ELSE
R3: if error is NS AND error is ZE then u is PS ELSE
R4: if error is ZE AND error is ZE then u is ZE ELSE
R5: if error is PS AND error is ZE then u is NS ELSE
R6:if error is PM AND error is ZE then u is NM ELSE
R7: if error is PB AND error is ZE then u is NB ELSE
R8: if error is ZE AND error is NB then u is PB ELSE
R9: if error is ZE AND error is NM then u is PM ELSE
R10: if error is ZE AND error is NS then u is PS ELSE
R11: if error is ZE AND error is PS then uis NS ELSE
R12: if error is ZE AND error is PM then u is NM ELSE
R13: if error is ZE AND error is PB then u is NB
se denomina a veces "matriz de asociación difusa (FAM)."Las partes en blanco en la tabla indican que no existe una norma actual para la combinación particular de variables LHS.
El algoritmo de control difuso se evaluó utilizando Generalized Modus Ponens (GMP). GMP es un procedimiento de inferencia basada en datos que implica la composición analítica de las relaciones difusas, por lo general la composición maxEmin.
Figura 2.7: Un algoritmo difuso en forma tabular.
Las entradas del controlador difuso suelen ser números nítidos. Considere la situación mostrada en la …gura 2.8 que implica las reglas R3, R4, R11 de las mostradas anteriormente
Tomando como referencia R3 en el instantet=k, nos dicen que el erroremuestra que tiene
un grado de pertenencia deF;Gen NS, mientras que la variación del error etiene un grado
de pertenencia deF;Hcon ZE. Así, el grado de cumplimiento de la regla R3 en este momento
en particular es:
IOF3 = N S(e)^ ZE( e) = F;G^F;H=F;H (2.11)
Siempre que hemos interpretado el conectivo LHS AND comoJ KL(^). El valor RHS PS se
transformará de acuerdo con DOF3 en la ecuación (2.11). La naturaleza de la transformación
depende de la implicación utilizada. Cuando la implicación mínima de Mamdani se utiliza cuando la transformación de PS asciende a recortes a la altura de DOF3 como se muestra en
la …gura 2.8. Así R3 contribuye P S ( u), con la parte sombreada del valor RHS, a la salida
MPF4 =
ZE(e)^ ZE( e) = Q;R^Q;S=Q;R (2.12)
MPF11 =
ZE(e)^ P S( e) =Q;R^1;Q=Q;R (2.13)
La salida difusa total es la unión de las tres salidas interpretando el término de enlace ELSE en las reglas establecidas con anterioridad como OR(_), es decir,
OU T( u) = P S0( u)_ ZE0( u)_ N S0( u) (2.14)
OU T( u)se muestra en la parte inferior de la …gura 2.8. En este punto tenemos que deT
fusi…car OU T( u)y obtener un valor nítido ukque represente OU T( u)para ser utilizado
Figura 2.8: Evaluación de tres reglas de control al tiempot=k utilizando la implicacion min de
Mamdani y la interpretación min de AND (DOF)
2.4.6. Métodos de defusi…cación
Después que la entrada ha sido procesada en el controlador por el algoritmo de control, el resultado es un OU T , que es una salida difusa(u). A la selección de un número nítidou
representante de OU T(u) es un proceso que se conoce como defusi…cación. La elección del
the center of sums (COS), y mean of maxima (MOM).
Defusi…cación Center of Area (COA)
En la defusi…cación COA el valor nítido u se toma para ser el centro geométrico de la salida OU T con valor difuso (u), donde OU T(u) se forma tomando la unión de todas las
contribuciones de las reglas cuyos DOF> 0. El centro es el punto que divide el área bajo la curva de OU T(u) en dos partes iguales. Supongamos que tenemos un universo de discurso
discretizado. La salida defusi…cada se de…ne como:
u =
PN
i=1ui OU T(ui)
PN
i=1 OU T(ui)
(2.15)
Defusi…cación Center of Sums (COS)
Como se muestra en la …gura 2.9, COS construye la función de pertenencia resultante tomando la suma (no sólo la unión) de salida de cada regla que contribuye. Por lo tanto las áreas superpuestas se cuentan más de una vez. COS es en realidad el método de defusi…cación más comúnmente utilizado. Esta dado por:
u =
PN i=1ui
PN
k=1 B0
k(ui)
PN i=1
PN
k=1 B0
k(ui)
(2.16)
donde B0
k(ui) es la función de pertenencia (a ui punto del universo de discurso) como
resultado de la activación de la reglak th.
Defusi…cación Mean of Maxima (MOM)
Una manera simple de defusi…car la salida es tomar el valor nítido con el mayor grado de pertenencia en OU T(u). A menudo, puede haber más de un elemento en el universo de
discurso que cuenta con el valor máximo, como puede verse en el OU T(u) de la …gura 2.8.
En tales casos, se puede seleccionar al azar a uno de ellos, o mejor aún, tomar el valor medio de los máximos. Supongamos que tenemos U máximos en un universo de discurso discreto.
u =
M
X
m=1
um
V
(2.17)
donde um es el mWésimo elemento en el universo de discurso donde la función de perteW
nencia de OU T(u) es el valor máximo, y V es el número total de tales elementos. La
defusi…cación MOM es más rápida que el COA.
Figura 2.9: Los tres metodos de defusi…cación: center of area (COA), center of sums
Capítulo 3
Con…guración y generación de
algoritmos para PLC de un control
difuso.
Antes de comenzar a ingresar el algoritmo de control difuso en el PLC con ayuda del FuzzyDesigner, hay que realizar algunas con…guraciones básicas en el PLC las cuales se mostrarán a continuación.
3.1. Con…guración de RSLogix 5000 (nuevo proyecto)
Para comenzar se debe abrir el programa RSLogix 5000 (…gura 3.1).
Figura 3.1: RS Logix 5000.
Una vez que se ha ingresado en la opción anteriormente indicada se despliega la ventana mostrada en la …gura 3.3, en la cual debe ingresar que tipo de controlador se va a emplear, el nombre del proyecto a generar, la revisión del controlador y una descripción del trabajo a realizar (es opcional).
Figura 3.3: Datos para nuevo controlador
En esta ocasión se empleará el controlador 1768ZL43 compactLogix5343, el cual aparece
en la pestaña de tipos de controlador (…gura 3.4).
Figura 3.4: Controlador 1768ZL43
Figura 3.5: Selección de revision.
Finalmente se asigna un nombre al proyecto, como se muestra en la …gura 3.6. En este caso por ser solo un ejemplo se le asigna el nombre prueba. Una vez colocado el nombre del proyecto en el campo correspondiente se selecciona Ok para así concluir con esta parte.
Figura 3.6: Ingreso de nombre del proyecto.
\a que se aceptó la primer con…guración aparece lo siguiente: en la parte superior el
su nombre correspondiente, como se puede visualizar en la …gura 3.7.
Figura 3.7:RSLogix 5000 al concluir con la selección y nombramiento del controlador a emplear.
3.1.1. Alta de tarjetas de entradas/salidas
Para realizar esta operación, hay que posicionarse sobre el ícono del controlador que aparece en la parte inferior del recuadro que se menciona con anterioridad (1769 Bus), dar click derecho, lo cual nos despliega un cuadro donde aparece la opción “nuevo módulo” (new module), seleccione esta opción como se muestra en la …gura 3.8.
Figura 3.8: Agregar nuevo
módulo.
con…gurar.
Figura 3.9: Selección de nuevo módulo.
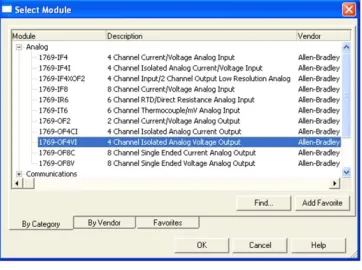
Debido al orden de las tarjetas se iniciará con las salidas analógicas.
Seleccionamos el primer menú que despliega las opciones de tarjetas analógicas (…gura 3.10). Aquí se realiza la búsqueda de la tarjeta correspondiente al primer slot del PLC que es la tarjeta de salidas analógicas 1769]OF4VI, una vez encontrada se debe seleccionar y dar
clic en el botón de Aceptar de la ventana.
Figura 3.10: Selección de tarjeta de entradas analógicas.
correspondientes se da aceptar (OK) a la ventana.
Figura 3.11:Con…guración de tarjeta analógica.
Se concluye con el ingreso de la tarjeta correspondiente y se regresa a la página inicial del software. Nótese que en el recuadro de la parte izquierda de la pantalla (…gura 3.12) aparece la tarjeta con…gurada indicando tanto el nombre asignado, número de slot y el tipo de tarjeta, es decir su clave.
Figura 3.12: Visualización de tarjeta con…gurada
Para con…gurar las demás tarjetas el procedimiento es el mismo, solo que en cada caso se debe seleccionar la tarjeta correspondiente y el slot correcto en el cual se posiciona.