I
IN
N
ST
S
TI
IT
T
UT
U
T
O
O
P
PO
OL
LI
IT
T
ÉC
É
CN
N
IC
I
C
O
O
N
N
AC
A
CI
IO
ON
N
A
A
L
L
E
ES
SC
C
UE
U
EL
LA
A
S
SU
UP
PE
E
RI
R
IO
OR
R
D
DE
E
I
IN
NG
GE
EN
NI
IE
ER
RÍ
ÍA
A
M
ME
EC
CÁ
ÁN
NI
IC
CA
A
Y
Y
E
EL
LÉ
ÉC
C
TR
T
RI
IC
CA
A
“
“
A
A
N
N
Á
Á
L
L
I
I
S
S
I
I
S
S
D
D
E
E
L
L
A
A
L
L
G
G
O
O
R
R
I
I
T
T
M
M
O
O
D
D
E
E
C
C
O
O
N
N
T
T
R
R
O
O
L
L
D
D
E
E
P
P
O
O
T
T
E
E
N
N
C
C
I
I
A
A
P
P
A
A
R
R
A
A
S
S
I
I
S
S
T
T
E
E
M
M
A
A
S
S
U
U
M
M
T
T
S
S
”
”
TESIS
QUE PARA OBTENER EL TÍTULO DE INGENIERO EN
COMUNICACIONES Y ELECTRÓNICA
PRESENTAN:
Irving Tadeo Arteaga Chávez
Raúl Hernández Acevedo
David Sainz Hernández
Asesores:
M. en C. Jaime Pedro Abarca Reyna
M. en C. José Ernesto Rojas Lima
I
Irving Tadeo Arteaga Chávez
A Dios por darme la oportunidad de concluir esta meta.
A mi familia por todo el apoyo recibido durante esta etapa de mi vida, a mis
padres ya que sin ellos no hubiera concretado este sueño.
A mis amigos por estar conmigo a lo largo de mi carrera, por su apoyo, ayuda y
amistad.
A mis asesores Jaime Pedro Abarca Reyna y José Ernesto Rojas Lima por sus
enseñanzas las cuales resultaron en la culminación de este trabajo, así
también por la amistad ofrecida durante estos años.
Raúl Hernández Acevedo
A mi familia por todo el apoyo recibido, a mis asesores por guiarme por este
camino, a mis amigos por todo el apoyo durante todo este tiempo, gracias a
cada una de las personas que me apoyaron durante esta etapa de mi vida.
David Sáinz Hernández
Quisiera agradecer a mi familia y amigos sabiendo que jamás existirá una
forma de compensarles todo su apoyo incondicional y desinteresado, por sus
esfuerzos y sacrificios constantes, por compartir conmigo alegrías y tristezas,
así como éxitos y fracasos y por encima de todo creer en mí. Porque gracias a
todos ellos a través de sus consejos y apoyo logre superar todos los obstáculos
que se me presentaron en el camino para obtener éxito en mi superación
profesional y personal. Con admiración y respeto, quiero decirles a todos
II
Estudiar y comprender la técnica de espectro disperso
Conocer el funcionamiento básico del sistema UMTS basado en el estándar WCDMA.
Comprender el funcionamiento del control de potencia para así percibir el impacto que este tiene en el desempeño del sistema.
Analizar los factores que pueden llegar a disminuir el rendimiento del sistema tales como la interferencia, los desvanecimientos y pérdidas por trayectorias múltiples.
Por medio de una simulación evaluar el algoritmo de control de potencia para un sistema UMTS basado en el estándar WCDMA.
III
Agradecimientos………... I
Objetivos……….. II
Contenido………III
Introducción………....VIII
Capítulo 1
ESPECTRO DISPERSO
1.1 DEFINICIÓN DE ESPECTRO DISPERSO ………...…..2
1.1.1 ANTECEDENTES HISTÓRICOS…………..……….………...…….3
1.1.2 DESEMPEÑO EN LA PRESENCIA DE INTERFERENCIA…….…..………4
1.1.3 JAMMING….………..……….…………..…6
1.1.4 EFECTOS DE PROPAGACIÓN EN SISTEMAS INALÁMBRICOS…...…..8
1.1.5 CANALES DE TRAYECTORIAS MÚLTIPLES ………..………....8
1.2 SECUENCIA DIRECTA Y SALTO DE FRECUENCIA POR ESPECTRO DISPERSO……...10
1.2.1 SECUENCIA DIRECTA.……..………...10
1.2.2 SALTO DE FRECUENCIA………...………..12
1.3 SECUENCIAS DE DISPERSIÓN ………...….13
1.3.1 SECUENCIAS DE PSEUDO-RUIDO (PN)………..………13 1.3.1.1 CARACTERÍSTICAS DE LAS SECUENCIAS PN………..……..14
1.3.1.2 GENERACIÓN DE SECUENCIAS PN………..……….14 1.3.1.3 PROPIEDADES DE LAS SECUENCIAS PN……..…….……...…16 1.3.1.4 SECUENCIAS-M…………..……….………....19
1.3.2 SECUENCIAS GOLD……..………...19
1.3.2.1 DECIMACIÓN ………..………..…………..20
1.3.2.2 PARES PREFERENCIALES………..………...20
1.3.2.3 GENERACION DE SECUENCIAS GOLD….….………..21
IV
1.3.3.1 SECUENCIA KASAMI PEQUEÑA…...………..………....23
1.3.3.2 SECUENCIA KASAMI GRANDE………..…….24
1.3.4 SECUENCIAS ORTOGONALES …………..……….….24
1.3.5 SECUENCIAS WALSH..………...….27
1.3.6 SECUENCIAS ORTOGONALES DE LONGITUD VARIABLE…....…...…28
1.3.6.1 GENERACIÓN DE OVSF……..………..29
1.4 ACCESO MÚLTIPLE………..31
1.4.1 FDMA ………...…..32
1.4.2 TDMA ……….33
1.4.3 CDMA………..34
1.4.4 OFDMA………..….……35
REFERENCIAS……….36
Capítulo 2 SISTEMAS WCDMA 2.1 INTRODUCCIÓN A LOS SISTEMAS WCDMA………..…..38
2.1.1 MODOS BÁSICOS DE OPERACIÓN (FDD Y TDD) ………...…………40
2.1.2 ESTÁNDAR ………...41
2.1.3 DISPERSIÓN………..43
2.1.4 CODIFICACIÓN DE VOZ EN WCDMA ………...44
2.2 CAPA FÍSICA……… 45
2.2.1 CANALES DE TRANSPORTE ………...45
2.2.2 CANALES DE TRANSPORTE DEDICADOS………...46
2.2.3 CANALES DE TRANSPORTE COMUNES………...47
V
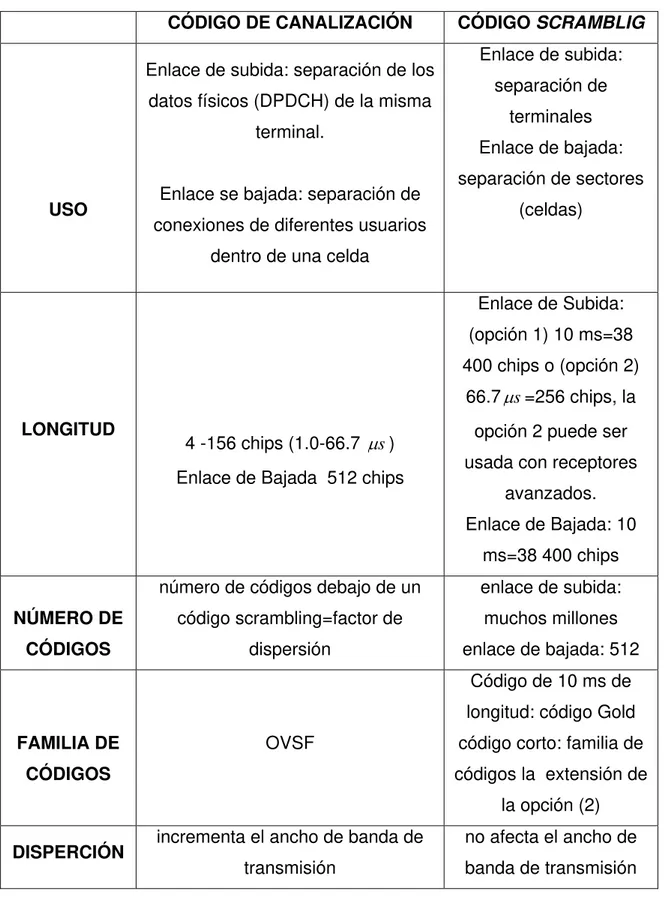
DE LOS CANALES FÍSICOS...48
2.2.5 SCRAMBLING………..48
2.2.6 CÓDIGOS DE CANALIZACIÓN………...49
2.3 CAPA MAC………..51
2.3.1 CANALES LÓGICOS………53
2.3.2 ASIGNACIÓN ENTRE CANALES LÓGICOS Y CANALES DE TRANSPORTE..54
2.3.3 SERVICIOS DE LA CAPA MAC……….54
2.3.4 MEDICIONES DE LA CAPA MAC………55
2.4TRANSFERENCIA DE LLAMADA……….55
2.4.1 TRANSFERENCIA DE LLAMADA CON INTERRUPCIONES……….56
2.4.2 TRANSFERENCIA DE LLAMADA ENTRE CELDAS Y ENTRE SECTORES…. 58 2.5 CONTROL DE POTENCIA………..60
2.5.1 EFECTO CERCA-LEJOS………....61
2.6 HSPA………62 2.6.1 HSDPA……….63
2.6.2 HSUPA……….………64
REFERENCIAS……….65
Capítulo 3
CONTROL DE POTENCIA
3.1 ALGORITMOS DE CONTROL DE POTENCIA………..67
3.1.1 ALGORITMO 1……….68
VI
3.2 CONTROL DE POTENCIA EN ENLACE DE SUBIDA………..69
3.2.1 CONTROL DE POTENCIA DE LAZO ABIERTO………...69
3.2.2 CONTROL DE POTENCIA DE LAZO CERRADO……….71
3.2.2.1 CONTROL DE POTENCIA DE LAZO INTERNO……….72
3.2.2.2 CONTROL DE POTENCIA DE LAZO EXTERNO………74 3.3 CONTROL DE POTENCIA EN ENLACE DE BAJADA………..80
3.3.1 CONTROL DE POTENCIA DE LAZO ABIERTO………...80
3.3.2 CONTROL DE POTENCIA DE LAZO CERRADO……….81
3.3.2.1 CONTROL DE POTENCIA DE LAZO INTERNO….……….81
3.3.2.2 CONTROL DE POTENCIA DE LAZO EXTERNO……….82 REFERENCIAS……….84 Capítulo 4 DESEMPEÑO DEL CONTROL DE POTENCIA 4.1 MODELOS DE SIMULACIÓN...86
4.2 AMBIENTE DE SIMULACIÓN...87
4.2.1 PÉRDIDAS POR TRAYECTORIA...88
4.2.1.2 MODELOS EMPÍRICOS PARA PREDECIR LAS PÉRDIDAS POR TRAYECTORIA (PATH LOSS)...89
4.2.1.3 MODELO DE DESVANECIMIENTOS POR OSCURECIMIENTOS (SHADOWING)...90
4.2.1.4 DESVANECIMIENTOS CORRELACIONADOS ESPACIALMENTE...91
VII 4.2.3 ALGORITMO SIMPLIFICADO
DE TRANSFERENCIA DE LLAMADA...96
4.2.4 CONTROL DE POTENCIA...99
4.2.4.1 PASO ADAPTABLE...99
4.3 RESULTADOS OBTENIDOS PARA EL ENLACE DE BAJADA...101
4.3.1 ALGORITMO 1 PASO FIJO...102
4.3.2 ALGORITMO 2 PASO FIJO...105
4.3.3 ALGORITMO 1 PASO ADAPTABLE...110
4.3.4 ALGORITMO 2 PASO ADAPTABLE...112
REFERENCIAS...115
CONCLUSIONES………117
VIII
INTRODUCCIÓN
El sistema que es analizado en este trabajo corresponde a un sistema de tercera generación (3G), el principal motivo por el cual se decidió trabajar sobre un sistema 3G, en este caso UMTS (Servicio universal móvil de telecomunicaciones) fue principalmente por las altas tasas de bits ofrecidas en los diferentes servicios, lo cual permitirá una mayor calidad en servicios de video, datos y acceso a internet.
UMTS actualmente es un sistema de mucha demanda a nivel mundial ya que combina tecnología de punta con excelente calidad de servicio, lo cual permite que este sistema se abra paso sobre países donde no se encuentra presente esperando una futura evolución que implica dejar a un lado los sistemas de segunda generación (2G) y entrar de lleno a los sistemas 3G que sin lugar a dudas brindaran mejores servicios tanto a los usuarios futuros como a los ya existentes.
El primer capítulo de este trabajo comprende el estudio de la técnica de espectro disperso, esta técnica tiene un alto grado de importancia ya que es la base del sistema a evaluar. El espectro disperso es cuando la señal a transmitir ocupa un ancho de banda mayor al ancho de banda mínimo para transmitir la información. A lo largo del primer capítulo estudiaremos las características más importantes de esta técnica así como los diferentes códigos de dispersión (pseudo ruido, códigos Gold, códigos Walsh y Kasami). También se dará un panorama histórico de cómo esta técnica ha ido evolucionando a través de los años pasando de dominio militar al comercial. Se describen también las diferentes técnicas de acceso múltiple donde estudiaremos algunas de ellas: FDMA (Acceso múltiple por división de de frecuencia), TDMA(Acceso múltiple por división de tiempo), CDMA (Acceso múltiple por división de código) y OFDMA (Acceso múltiple por división de frecuencia ortogonal), siendo CDMA la más importante dentro de este trabajo.
IX
tipos de transferencia de llamada con interrupción, sin interrupción entre sectores y sin interrupción entre celdas.
WCDMA cuenta con un servicio de datos de alta velocidad HSDPA y HSUPA, de los cuales serán mencionadas sus características principales.
El capítulo 3 se enfoca de manera amplia al análisis del control de potencia dentro del sistema WCDMA. Este es un proceso importante ya que este sistema es limitado por la interferencia. Entonces para disminuir la interferencia entre usuarios es necesario controlarlos en potencia. Los tipos de control de potencia que se estudiaran en este capítulo son; el control de potencia de lazo abierto. y el control de potencia de lazo cerrado . En el primero la estación móvil fija las potencias iníciales antes de iniciar el control de potencia y en el segundo su principal objetivo es mantener la SIR lo más cercana posible a la SIR óptima, así como realizar las mediciones de la SIR recibida, para poder realizar una comparación y así determinar la potencia para poder decidir si esta necesita un ajuste el cual podrá disminuir o aumentar.
1
CAPÍTULO 1
ESPECTRO DISPERSO
Cuando se mencionan los sistemas de telefonía móvil de tercera generación
(3G), es inevitable pensar en espectro disperso. En este capítulo se presenta la
definición y características de la técnica de espectro disperso. También se
presenta una breve reseña histórica sobre espectro disperso, en la cual se
observa como la técnica pasa del dominio militar al comercial. .
Dos de las formas más importantes para realizar espectro disperso son:
secuencia directa (DS) y salto de frecuencia (FH). Es importante estudiar estas
dos técnicas ya que los sistemas que utilizan acceso múltiple por división de
código (CDMA) se basan en ellas (DS-CDMA y FH-CDMA).
Otro punto importante dentro del contenido de este capítulo son las técnicas de
acceso múltiple tales como FDMA, TDMA, CDMA Y OFDMA. Ya que son de
gran relevancia cuando se habla de sistemas de comunicaciones tanto
inalámbricos como fijos.
Por último se estudian las características y propiedades (correlación cruzada y
auto correlación) de las señales utilizadas en espectro disperso. Existen varios
tipos de secuencias de dispersión que ofrecen estas características algunas de
2
1.1 DEFINICIÓN DE ESPECTRO DISPERSO
Para poder entender el funcionamiento de los sistemas de telefonía móvil de
tercera generación es necesario tener pleno conocimiento de la técnica de
espectro disperso, la cual ha incrementado su área de aplicación a través de
los años por su utilización en diferentes sistemas de comunicaciones, algunos
sistemas que emplean técnicas de espectro disperso son [1]:
• Sistemas Antijam1
• Sistemas de acceso múltiple por división de código
• Sistemas diseñados para evitar pérdidas por trayectorias múltiples.
• Teléfonos cordless
• Redes WLAN
• Sistemas Bluetooth
Las primeras aplicaciones de espectro disperso fueron desarrolladas para
sistemas militares. Posteriormente fue utilizada en sistemas comerciales
móviles de radio, de tiempo y posición y en aplicaciones satelitales
especializadas.
Los sistemas de espectro disperso fueron diseñados para evitar un intento de
interrupción de la comunicación, también conocido como jamming. Para
interrumpir la comunicación de forma intencional se necesitaban realizar dos
operaciones [2]:
• Detectar que una transmisión se está llevando a cabo.
• Transmitir una señal jamming para enmascarar la transmisión.
3 En un sistema de espectro disperso la señal transmitida deberá de tener un alto
grado de dificultad para ser detectada, es decir, tener baja probabilidad de
intercepción (LPI). También deberá de ser robusta a las distorsiones
intencionales.
En la literatura podemos encontrar varias definiciones de espectro disperso.
• Cuando la señal a transmitir ocupa un ancho de banda en exceso del ancho de banda mínimo para mandar la información. La dispersión se
realiza por medio de un código que es independiente de los datos [3].
• El espectro disperso es una técnica de transmisión en donde un código de Pseudo ruido, independiente a los datos, es utilizado como una
forma de onda modulada para dispersar la energía de la señal sobre un
ancho de banda que es mucho mayor que el ancho de banda de la
señal de información. En el receptor la señal es concentrada usando
una réplica sincronizada de código de Pseudo ruido [4].
En general la técnica de espectro disperso tiene un punto en común, utilizar un
ancho de banda mayor al ancho de banda mínimo para transmitir la
información.
1.1.1 ANTECEDENTES HISTÓRICOS
La historia de espectro disperso abarca más de seis décadas. Para obtener
una reseña histórica de cómo este sistema fue cobrando fuerza, realizaremos
un breve recuento de los aspectos históricos más importantes que envolvieron
la evolución de dicha tecnología.
El primer radar basado en espectro disperso fue realizado por G. Guanella en
1938. Durante y después de la segunda guerra mundial se han realizado
4 disperso los principales países involucrados son: Alemania, Estados Unidos,
Inglaterra y Rusia.
Durante mucho tiempo esta información en cuanto a avances tecnológicos e
investigaciones, se encontraba fuera del alcance de las aplicaciones
comerciales ya que dicha información permanecía almacenada y resguardada
por los servicios de inteligencia militar.
Un ejemplo de aplicación militar es la creación del sistema de navegación
mundial Loran-C, desarrollado en los inicios de 1960. Este sistema transmitía
señales genuinas de espectro disperso teniendo un producto de tiempo y
frecuencia.
Otra aplicación importante de espectro disperso es la creación del sistema
basado en una red de posicionamiento global GPS ( en Estados Unidos y
Rusia) en la década de 1980 y los inicios de la década de 1990.
Los primeros trabajos referentes a aplicaciones militares de espectro disperso
en transmisión de datos fueron situándose en el aspecto de encriptamiento de
la voz y protección de las comunicaciones.
La era comercial en cuanto a la aplicación del sistema de espectro disperso se
genero aproximadamente a finales de la década de 1970, al mismo tiempo que
los sistemas de telefonía móvil empezaban a desplegarse en el mundo. El
primer sistema comercial desarrollado por Qualcom fue el sistema de red
celular CDMA en Estados Unidos.
1.1.2 DESEMPEÑO EN LA PRESENCIA DE INTERFERENCIA
Un sistema de espectro disperso es tolerante a interferencias de banda
5
n i
w S
0
f f1
[W HZ] p /
[ ]Hz f
C W
n s
0
f f1 f[ ]Hz
C W i W wr
i iw [W HZ]
p /
a) b)
FIGURA 1.1 PROCESO DE CONCENTRACIÓN EN PRESENCIA DE INTERFERENCIA
Considerando que una señal de banda ancha Sw es recibida en presencia de
una interferencia de banda angosta. El proceso de concentración se presenta
a continuación:
(
Sw +in)
=[
( )
Sn]
+( )
in =Sn +iw− −
−1 ε 1 ε ε 1
ε (1.1)
La operación de concentración convierte la señal de entrada en una suma de
señales de banda angosta útiles y una señal de banda ancha que interfiere en
el sistema. Después de la operación de concentración es aplicado un filtro
pasabandas de ancho de banda Bn el cual es igual al ancho de banda Wi de Sn.
Esto da como resultado:
F
(
Sn +iw)
=Sn +F( )
iw =Sn +iwr (1.2)Solo una pequeña porción de la interferencia logra pasar por el filtro y se
conoce como interferencia residual, porque el ancho de banda Wc es mucho
más grande que Wi (Ver figura 1.1 (b)). La información entre la modulación
transmitida del ancho de banda y la señal de información del ancho de banda
es llamada ganancia de procesamiento, Gp.
6 i
c P
W W G =
(1.3)
En la figura 1.1 podemos apreciar el efecto de la ganancia de procesamiento,
mientras el sistema obtenga una mayor ganancia de procesamiento se
suprimirá un mayor número de potencia de las señales de interferencia no
correlacionadas en el proceso de concentración. Así mismo la ganancia de
procesamiento puede observarse como un factor de mejora en la relación señal
a interferencia (SIR) , después de la contracción de la señal [5].
1.1.3 JAMMING
Es necesario poseer una clara idea respecto a la definición del termino
jamming, ya que es de suma importancia dentro de los sistemas de espectro
disperso.
Una de las aplicaciones más importantes de las técnicas de espectro disperso
es la resistencia que ejerce a la interferencia ocasionada intencionalmente.
Tomando en cuenta que las interferencias surgen como resultado de la
presencia de otros sistemas, siempre y cuando estos sistemas se encuentren
operando en una frecuencia que se encuentre cercana a la frecuencia de
operación del sistema en cuestión.
El principal objetivo del jamming es perturbar la comunicación de otro usuario,
a si mismo se deberá desarrollar una resistencia hacia este tipo de
interferencias tomando en cuenta las siguientes observaciones [4]:
• No es posible obtener una invulnerabilidad completa
• El jamming tiene un conocimiento primordial de la mayoría de las
propiedades de los parámetros del sistema.
• El jamming no tiene conocimiento de los códigos de dispersión de
7 Los 2 tipos más comunes de señales jamming son ondas senoidales de
frecuencia simple (tonos) y ruido de transmisión (broad band).
El caso más simple a analizar es el ruido jamming de transmisión. Si la señal
jamming es modelada con media cero y un proceso de ruido estacionario
Gaussiano con una densidad espectral de potencia plana sobre el ancho de
banda de interés, para un valor fijo de potencia PJ disponible para la señal
jamming, la densidad de potencia espectral de la señal jamming debe de
reducirse tanto como el ancho de banda ya que la ocupación del jamming
disminuye [3].
Para los tonos jamming, su análisis resulta un tanto más complicado, que el
análisis del ruido jamming. Esto se debe a que el desempeño del sistema
depende sobre la localización del tono o tonos, y sobre si el periodo de la
secuencia de dispersión es igual o mayor que la duración de los símbolos de
datos.
Otro tipo de jamming en cual se hará un énfasis será en el jamming de banda
angosta. Este tipo de jamming es más típico en situaciones donde en una cierta
parte del sistema, no existe una intención clara de hostilidad con respecto al
sistema útil, y este a su vez crea una señal jamming como resultado del
desempeño normal del sistema, la figura 1.2 muestra la amplitud del espectro
de la señal útil y el espectro de potencia del jamming aproximados
por rectángulos contra el espectro de potencia de fondo uniforme del ruido
blanco aditivo Gaussiano (AWGN) 2
0 N
.
Este tipo de jamming es denominado de banda angosta, por el hecho que su
ancho de banda Wj es más pequeño que el ancho de banda de la señal W y a
demás existen áreas donde el espectro de la señal no es afectado por la
8
f
j
W W
2 /
0
N
FIGURA 1.2 ESPECTRO DE LA SEÑAL JAMMING DEL AWGN
1.1.4 EFECTOS DE PROPAGACIÓN EN SISTEMAS INALÁMBRICOS
Para poder entender el merito que tiene un sistema de espectro disperso,
debemos de entender ciertos conceptos, es importante conocer los efectos de
la propagación en los sistemas que utilizan el espacio como medio de
transmisión.
Existen diferentes factores que causan atenuación, la señal recibida no solo es
afectada por AWGN, también puede presentar alteraciones por medio de
interferencias múltiples, las cuales se caracterizan por cambiar la escala de la
amplitud de la señal [6].
1.1.5 CANALES DE TRAYECTORIAS MÚLTIPLES
Uno de los retos más importante es tratar de predecir con exactitud las
características del canal de transmisión, ya que a partir de ello podremos
seleccionar en forma apropiada la arquitectura que ha de llevar nuestro sistema
de comunicaciones, dimensionar sus componentes y optimizar los parámetros
9 uno de los canales mas complicados de caracterizar, algunos de los
fenómenos que se presentan son pérdidas por trayectorias múltiples,
interferencias, desvanecimientos lentos y rápidos, desvanecimientos de la
señal por obscurecimientos “shadowing”.[7]
El canal de radio presenta diferentes trayectorias de propagación (Figura 1.3),
esto significa que no solo existe una trayectoria que va del trasmisor al
receptor. Las diferentes trayectorias son provocadas por [4]:
• Reflexiones o refracciones atmosféricas
• Reflexiones ocasionadas por la tierra, edificios u otros objetos
• Cambios rápidos en la intensidad de la señal (para distancias cortas ~ λ/2).
• Modulación en Frecuencia aleatoria (Efecto Doppler).
• Dispersión en el tiempo (ecos debido a los retardos de propagación por trayectorias múltiples).
Transmisor Receptor
Distancia 1 Distancia 2
Distancia 3 Distancia 4
10 Además el canal de radio, agrega diferentes efectos a la señal de transmisión
como son: pérdidas por oscurecimientos, este tipo de pérdidas son
ocasionadas por la presencia de obstáculos, los cuales se encuentran en el
camino de las ondas transmitidas, algunos ejemplos de estos obstáculos son
montañas, edificios, árboles, etc. Este tipo de perdidas nos trae como resultado
una atenuación en la señal transmitida. Otros efectos son las pérdidas por
trayectorias múltiples, este tipo de pérdidas ocurren cuando diferentes
trayectorias emergen como resultado de la onda transmitida siendo a su vez
reflectada por varios objetos (figura 1.3).
Así mismo es posible observar que en la antena receptora llegan un cierto
número de ondas proveniente de diferentes direcciones con diferentes retardos
de tiempo, atenuación y fase. La superposición de estas ondas da como
resultado variaciones en amplitud y fase en la señal recibida.
1.2 SECUENCIA DIRECTA Y SALTO DE FRECUENCIA POR ESPECTRO DISPERSO
1.2.1 SECUENCIA DIRECTA
En un sistema de espectro disperso por secuencia directa los datos
digitalizados con una tasa de bits se modulan con una señal dispersada de
banda ancha obtenida de un generador de secuencia aleatoria o PN, de mucha
mayor tasa que provee la frecuencia de operación como se muestra en la
figura 1.4
Su mad or Mo du lo 2
Mo dulad or Balan cead o
Po rt ad ora Secu en cia PN
Señal d e In formacio n b( t )
c(t )
Señ al ( Secuencia Directa)
11 Se puede observar un ejemplo (figura 1.5) para un mensaje b(t) dado.
FIGURA 1.5 EJEMPLO DE GENERACIÓN DE SECUENCIAS ALEATORIA
Los símbolos obtenidos con este generador son llamados chips y su tasa de
chipdefine el ancho de banda de la señal de espectro disperso transmitida. La
relación entre la tasa de chip y tasa de bit es llamada ganancia de
procesamiento que es una verdadera relación señal – jamming en el receptor
luego de la operación de contracción del espectro (remoción del código PN) [7].
Luego de esta primera modulación, se realiza una segunda modulación con
una portadora de frecuencia intermedia (IF) y luego otra con una de radio
frecuencia (RF) y se transmite la señal de espectro disperso. El receptor de un
sistema de espectro disperso por secuencia directa debe eliminar la dispersión
del espectro de la señal producida en el transmisor y luego proceder a la
demodulación.
Durante la contracción del espectro, el receptor debe generar una réplica
exacta de la señal PN generada en el transmisor lo que se logra con técnicas
de correlación. En otros términos, el código PN de la señal debe ser alineado
12 El receptor puede deslizar el código local buscando coincidencia con el código
que se recibe hasta que logra este objetivo; luego, se mezcla con la señal
compuesta produciendo la información transmitida.
La forma básica de una señal de espectro disperso por secuencia directa es
una señal BPSK (Modulación binaria por cambio de fase) para desplazamiento
de fase de 180°.
1.2.2 SALTO DE FRECUENCIA
Constituye otra técnica básica empleada en espectro disperso. En un sistema
de este tipo, la frecuencia permanece constante durante la duración de un chip
mientras que varía entre uno y otro, tal como se puede observar en la figura
1.6.
Idealmente, la frecuencia de salida de un sistema FH es una frecuencia única.
Así, el espectro ideal de frecuencia es perfectamente rectangular, con
transmisiones en cada canal de frecuencia disponible. En la práctica, existen
además de la frecuencia deseada, frecuencias no deseadas generadas durante
el cambio de frecuencia.
Codig o PN 1
Codig o P N 3
C odi go PN 4 Codig o P N 2
Codig o PN 5
Frecuencia 5 Frecuencia 4 Frecuencia 2 Frecuencia 1
Frecuencia 3
Tiempo
FIGURA 1.6 SALTO DE FRECUENCIA
La señal recibida en el receptor se mezcla con un código réplica generado
13 secuencias de código del transmisor y del receptor están en sincronía.
Entonces, cualquier señal distinta a la réplica se dispersa por multiplicación con
la señal de referencia local y posteriormente se desecha [3].
1.3 SECUENCIAS DE DISPERSIÓN
Las secuencias de dispersión son utilizadas en las técnicas de espectro
disperso para realizar la expansión del espectro en la transmisión y la
concentración en la recepción. Las secuencias o códigos de dispersión tienen
diferentes ventajas, el tipo apropiado de código debe de ser seleccionado para
la pertinente situación, aplicación y escenario [8], por lo que existen varios
tipos de secuencias de dispersión las cuales son:
• Secuencias de Pseudo-Ruido • Secuencias Kasami y Gold
• Secuencias ortogonales (de longitud fija y longitud variable)
El principal criterio para seleccionar una serie de códigos está basado sobre las
funciones de autocorrelación y correlación cruzada [3]. Las propiedades de
correlación cruzada determinan la cantidad de interferencia entre usuarios [4].
1.3.1 SECUENCIAS DE PSEUDO-RUIDO (PN)
La secuencia PN es una secuencia de Pseudo ruido de 1’s y 0’s, pero no es
realmente una secuencia aleatoria debido a que es periódica. Las señales
aleatorias no pueden ser pronosticadas con precisión. La autocorrelación de
una secuencia PN tiene propiedades similares a las de ruido blanco [5, 7]. Las
secuencias PN han sido diseñadas para poseer una correlación muy baja (muy
cercana a cero) entre versiones recorridas de la misma secuencia, y así como
también poseer una correlación cruzada muy baja entre diferentes secuencias,
14 que utilizan el mismo ancho de banda en la aplicación de un sistema de acceso
múltiple [9].
1.3.1.1 CARACTERÍSTICAS DE LAS SECUENCIAS PN
Las secuencias PN presentan las siguientes características [8]:
• Las secuencias PN no son aleatorias, pero estas son vistas aleatoriamente por el usuario quien no conoce el código.
• Son determinísticas, la señal periódica es conocida para ambos el transmisor y el receptor.
• Presenta propiedades estadísticas similares a las del muestreo de ruido blanco.
Con respecto a su longitud, se presentan dos casos:
• Código PN corto: La misma secuencia PN para cada símbolo dato
(
Nc.Tc =Ts)
• Código PN largo: El periodo de la secuencia PN es mucho más larga que el símbolo, tal que un diferente patrón de chip es asociado con
cada símbolo
(
Nc.Tc >>Ts)
.1.3.1.2 GENERACIÓN DE CÓDIGOS PN
Las series de códigos PN pueden ser generadas por registros de cambio de
retroalimentación lineal. Un ejemplo tomado de [3] es mostrado en la figura
1.7, en la cual una serie de bits son cambiados a través de diferentes etapas
del registro. Donde la salida de la última etapa y la salida de una etapa
inmediata son combinadas por medio de un sumador modulo-2 y alimentan la
15 Entonces el registro comienza con una secuencia inicial, o estado inicial,
almacenado en esta etapa. Entonces el registro es retroalimentado, y los bits
son recorridos a través de las etapas. Y así, el registro continua generando bits
de salida y alimentando bits de entrada para estas primeras etapas.
FIGURA 1.7 EJEMPLO DE LA GENERACIÓN DE SECUENCIAS PN
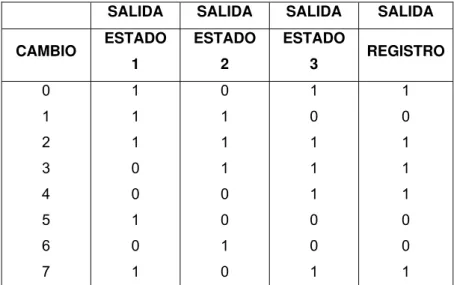
Los bits de salida de la última etapa forman un código PN. Utilizando la figura
7 se demuestra la generación de un código PN. Tomando en cuenta que un
estado inicial de [1, 0, 1] es usado para el registro. La salida de la etapa 3 es la
salida del registro. Después recorriendo los bits a través del registro, se pueden
obtener los resultados resumidos en la tabla 1.1.
SALIDA SALIDA SALIDA SALIDA
CAMBIO ESTADO 1
ESTADO 2
ESTADO
3 REGISTRO
0 1 2 3 4 5 6 7 1 1 1 0 0 1 0 1 0 1 1 1 0 0 1 0 1 0 1 1 1 0 0 1 1 0 1 1 1 0 0 1
16 Con ayuda de la tabla nos podemos dar cuenta fácilmente que en el cambio 7,
el estado del registro regresa el estado inicial, y otro cambio de los bits produce
otra secuencia idéntica de salida. De esta manera, la longitud efectiva del
código periódico generado es 7. El registro de salida forma el código PN, el
cual es:
]
0
0
1
1
1
0
1
[
=
p
Con lo que el código generado de esta manera es llamado "código de registro
de máxima longitud", y la longitud máxima de L es
L
=
2
N−
1
.Donde es el número de etapas u orden, del registro. En esta caso se tiene
que , y la longitud del código es de 7. La estructura del código PN es
determinada por la retroalimentación lógica y el registro del estado inicial [3].
N
3 =
N
1.3.1.3 PROPIEDADES DE LAS SECUENCIAS PN
PROPIEDAD BALANCE
En cada periodo de la secuencia el número de 1s binarios difiere de el número
de 0s por al menos un digito (para Nc impar).
∑
=+→ −
− + − + + +
= 1 1 1 1 1 1 1 1
pn
DISTRIBUCIÓN DE SUCESIONES
Una sucesión es una secuencia de dígitos binarios. Entre las sucesiones de
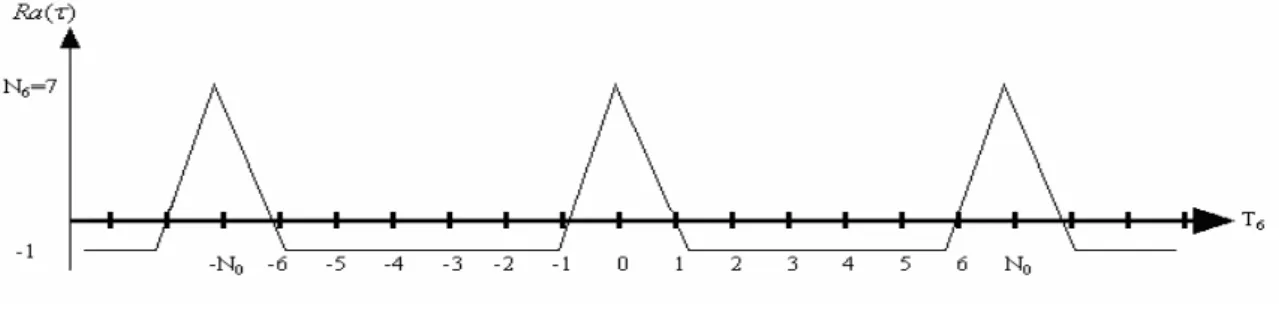
17 AUTOCORRELACIÓN
La función de autocorrelación para la secuencia periódica PN está definida
como el número de acuerdos menor al número de desacuerdos en una
comparación término por término de un periodo completo de la secuencia con
un cambio cíclico (posición τ ) de la propia secuencia.
−
∫
+ ⋅ = 2 2 ) ( ) ( ) ( c c c c T N T N dt t pn t pnRaτ τ
(1.4)
Tomando por ejemplo la siguiente secuencia:
1 1 1 1 1 1
1 + + − + − −
+
Se puede observar la siguiente:
En τ =0
1 1 1 1 1 1 1 ) 0 ( 1 1 1 1 1 1 1 ) 0 ( − − + − + + + = − − + − + + + = pn pn
+1 +1 +1 +1 +1 +1 +1 =
∑
=7=Ra(τ =0)Y ahora en τ =1
1 1 1 1 1 1 1 ) 0 ( 1 1 1 1 1 1 1 ) 0 ( + − − + − + + = − − + − + + + = pn pn
18 FIGURA 1.8 AUTOCORRELACIÓN
Con lo anterior se puede observar que para secuencias PN la autocorrelación
tiene un pico máximo solamente para una perfecta sincronización de dos
secuencias idénticas (igual al AWGN).
CORRELACIÓN CRUZADA
La correlación cruzada describe la interferencia entre códigos pni y pnj
∫
−
+ ⋅
=
2
2
) ( ) ( )
(
c c
c c
T N
T N
j
i t pn t dt
pn
Rcτ τ
(1.5)
La correlación cruzada es la medición de acuerdos entre dos códigos diferentes
y [5].
i
pn pnj
19 1.3.1.4 SECUENCIAS-M
Un generador de registro de cambio simple (SSRG) tiene todas las señales de
retroalimentación de regreso a una sola entrada de un registro de cambio (línea
de retardo). El SSRG es lineal si la función de retroalimentación puede ser
expresada como una suma modulo 2 (xor) (figura 1.10).
n n n
c
x
c
x
c
x
x
x
x
f
(
1,
2,...,
)
=
1 1+
2 2+
...
+
1 2 3 4 5 6 ... L
FIGURA 1.10 GENERADOR DE REGISTROS DE CAMBIO SIMPLE
La función de retroalimentación es una suma modulo 2 del
contenido de de las celdas con siendo los coeficientes de la conexión de
retroalimentación
) ,..., ,
(X1 X2 Xn f
i
x ci
) 1
, 0
(ci= =abierto ci= =conectado . Cuando un SSRG está formado de L etapas este tiene una longitud de , y a este se le
llama secuencia de máxima longitud o simplemente secuencia-m.
1 2 − = L c
N
1.3.2 SECUENCIAS GOLD
Las series Gold son una serie de secuencias con periodo generadas
por la suma modulo-2 de dos secuencia-m de la misma longitud, donde es
impar o modulo-4 [4]. Estas secuencias código son sumadas chip por
chip por sincronización de reloj (figura 1.11). Las secuencias generadas son de
la misma longitud de las dos secuencias-m que fueron sumadas .Debido a que
las secuencias-m son de la misma longitud, los dos códigos generados deben
de mantener la misma relación de fase porque cada cambio de fase entre las
20 FIGURA 1.11 SUMA DE SECUENCIAS CÓDIGO POR SINCRONIZACIÓN DE RELOJ
Algún par de códigos de registro de un generador Gold de longitud L pueden
generar 2L −1 secuencias de longitud 2L−1 más las dos secuencias-m base,
dando un total de 2L +1 secuencias [5].
1.3.2.1 DECIMACIÓN
Considerando una secuencia-m representada por un vector binario de
longitud y una segunda secuencia obtenida por muestreo todo
símbolo de a. Es dicho que la segunda secuencia es una decimación de la
primera, y la notación es usada para indicar que es obtenida por
muestreo todo símbolo de . tiene periodo si y solo si el máximo
común divisor [7, 8].
a
N a' qth
] [ '
q a
a = a'
th
q a a' =a[q] N
1 ) , (N q =
mcd
1.3.2.2 PARES PREFERENCIALES
Se tiene que dos secuencias-m a y a' son llamadas pares preferenciales si:
• n≠0(mod 4); esto es, es impar, o n n=2(mod 4)
• a' =a[q], donde es impar y cualquiera de los dos q q=2k +1 o 1
2 22 − +
= k k
21 • ⎩ ⎨ ⎧ = = ) 4 (mod 2 2 1 n para impar n para mcd
La correlación cruzada espectral entre un par preferencial tiene tres
estimaciones, donde estos valores son −t(n) , −1 , t(n)−2 donde [3, 4, 5, 8, 9]: ⎪⎩ ⎪ ⎨ ⎧ + + = + + par n para impar n para n t n n 2 2 2 1 2 1 2 1 ) (
1.3.2.3 GENERACIÓN DE SECUENCIAS GOLD
Para poder generar una secuencia Gold se maneja el siguiente procedimiento
tomado de [9], el cual representa y como un par preferencial de
secuencias-m teniendo periodo . La familia de códigos definida por a a'
1 2 − = n
N
{
, ', , ', 2 ',..., 1 '}
a D a a D a Da a a a a
a + + + + N− donde es el elemento de retardo y
es llamado serie de códigos Gold para este par preferencial de secuencias-m.
Con excepción de las secuencias y , la serie de secuencias Gold no son
secuencias máximas. Por lo tanto, toma tres valores de correlación cruzada.
Con esto se puede comparar el valor pico de la correlación cruzada de las
secuencias Gold con el límite inferior, desarrollado por Welch. Para
un grande el límite de Welch es menor de
D
a a'
N 2 para impar y de 2 para
par.
n n
Dejando f1(D)ser un polinomio indeducible de grado n con la raíz de α, es llamado polinomio mínimo de
) ( 1D
f α ; y dejando ser el polinomio
mínimo de , donde ambos y son de grado . Entonces las
secuencias generadas por y son dos secuencias-m
preferenciales. En la figura 1.12 se ilustra la generación de 33 códigos Gold de
longitud 31 por la sumatoria de dos secuencias generadores de registros de )
( ft D
) (n t
α f1(D) ft(D) n
) ( 1D
22 cambio de retroalimentación lineal. La familia completa de códigos Gold para
este generador es obtenida usando diferentes lecturas iniciales del registro de
cambio.
Los
2
5+
1
=
33
códigos generados por esta estructurasecuencia 1 1 1 1 1 1 0 0 0 1 1 0 1 1 1 0 1 0 1 0 0 0 0 1 0 0 1 0 1 1 0 0
secuencia 2 1 1 1 1 1 0 0 1 0 0 1 1 0 0 0 0 1 0 1 1 0 1 0 1 0 0 0 1 1 1 0
combinación de cambio 0: 0 0 0 0 0 0 0 1 1 1 1 0 1 1 0 1 1 1 1 1 0 1 1 1 0 1 0 0 0 1 0
combinación de cambio 1: 0 0 0 0 1 0 1 0 1 0 1 1 1 1 0 0 0 0 1 0 1 0 0 0 0 1 1 0 0 0 1
. . .
combinación de cambio 30: 1 0 0 0 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0 1 1 0 0 0 1 1 0 1 0 1 1
*cambio de la secuencia 2 a la izquierda
FIGURA 1.12 GENERACIÓN DE UNA SERIE CÓDIGO GOLD
Algunas de las aplicaciones de las secuencias Gold son en algoritmos de
soporte de CDMA y salto de frecuencia.
1.3.3 SECUENCIAS KASAMI
Los códigos Kasami son derivados de las secuencias-m. Las series de
secuencias Kasami son importantes debido a su muy baja correlación cruzada
23 de las funciones de correlación cruzada son pares más pequeños en
comparación con los de los códigos Gold.
El grado del polinomio correspondiente de la secuencia tiene que ser par
. En este caso, la longitud m
k
m=2 M =2m −1 puede ser factorizada de la siguiente manera: =(2k −1)⋅
(
2k +1)
M , k =m 2 [3].
Hay dos tipos diferentes de secuencias Kasami, la cuales son:
• Secuencias Kasami pequeñas. • Secuencias Kasami largas
1.3.3.1 SECUENCIA KASAMI PEQUEÑA
Una secuencia Kasami pequeña comprende 22
m
secuencias con periodo 2m −1
donde es par. Para generar una serie extensa, una secuencia-m a con
periodo es decimada por m
1 2 − = m
N =22 +1
m
q para formar una secuencia
binaria con periodo b ( , )=22 −1
m
q N mcd
N . La suma modulo-2 de y algún
cambio cíclico de b de 0 a
a
2 22 −
m
suministra una secuencia Kasami con
periodo . La correlación cruzada periódica entre dos secuencias Kasami
en una serie pueden tomar los valores de 1
2m −
N N
m
s( ) , −1
− o
[
s(m)−2]
N, donde
1 2 )
( = 2 +
m
24 1.3.3.2 SECUENCIA KASAMI GRANDE
Una secuencia Kasami grande comprende 2m2
(
2m +1)
secuencias si m=2modulo-4 y 2m2
(
2m+1)
−1 secuencias si m=0 modulo-4. Estas secuencias tienen periodo . Ahora para generar una serie con una secuencia-mcon periodo es decimado por 1
2m −
a
1 2 − = m
N q=2m2 +1 para formar una secuencia binaria entonces esta a su vez es decimada por b q=2(m+2)2 +1 para formar otra secuencia binaria . c
Ahora al realizar la suma modulo-2 de , a un cambio cíclico de b , y a un
cambio cíclico de se suministra una secuencia Kasami con periodo . Las
correlaciones cruzadas periódicas entre dos secuencias Kasami en una serie
pueden solo tomar los valores
a
c N
[
( ) 2]
, ( ) ,, ) ( ,
1N −t m N t m − N −s m N
− o
[
s(m)−2]
N.Una serie de secuencias Kasami grandes incluyen una serie de secuencias
Kasami pequeña y una serie de secuencias Gold como sub-series [4, 8].
Comparando las secuencias Gold y Kasami de longitud M, el valor pico de
correlación cruzada es menor para las Secuencias Kasami, mientras la función
de correlación cruzada de los códigos Gold toma el valor más bajo posible
M 1
− más frecuentemente [3].
1.3.4 SECUENCIAS ORTOGONALES
Se dice que dos valores reales de forma de onda x y y son ortogonales si su
25 dt t y t x R T xy =
∫
0 ) ( ) ( ) 0
( (1.5)
En el tiempo discreto, las dos secuencias x y y son ortogonales si su producto
cruzado Rxy
( )
0 . El producto cruzado está definido como:
∑
= (1.6) = = I i i i Txy x y x y
R 1 ) 0 ( Donde (1.7) ] [ ] [ 2 1 2 1 l T l T y y y y x x x x L L = =
Observando que T denota el traspaso del vector columna, el cual es otra representación de una secuencia de números. Por ejemplo, las siguientes
secuencias o códigos, x y y, son ortogonales:
] 1 1 1 1 [ ] 1 1 1 1 [ − − = − − = T T y x
Debido a que su correlación cruzada es cero, esto es:
0 ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( ) 0
( = x y = − − + − + + − =
Rxy T
En suma con la propiedad de correlación cruzada cero, cada código en la serie
de códigos ortogonales debe tener un igual número de 1s y -1s. Esta segunda
propiedad da a un código una particular naturaleza pseudo-aleatoria. La tercera
propiedad es que el producto punto de cada código escalado por el orden del
código debe ser igual a 1. El orden del código es efectivamente la longitud del
26 la secuencia por sí misma y sumando los términos individuales, entonces, el
producto punto del código x es:
(1.7)
∑
= = = I i i i Txx x x x x
R
1 )
0 (
Los dos códigos ortogonales en el ejemplo anterior también satisfacen la
segunda y la tercera condición. Pero x y ytienen un número igual de 1s y -1s,
y la escala de productos punto es:
1 4 4 ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( 4 ) ( 1 4 4 ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( ) 1 )( 1 ( 4 ) ( = = + + − − + − − = = = + + − − + − − = y y x x T T
Notando que el orden de cada código es 4. Con lo que se puede resumir las
propiedades de las series de códigos ortogonales para ser usados en técnicas
de acceso múltiple como se muestra a continuación [2]:
1.- La correlación cruzada puede ser cero o más pequeña.
2.- La escala producto punto de cada código debe ser igual a 1.
Las funciones ortogonales son empleadas para mejorar la eficiencia del ancho
de banda de sistemas de espectro disperso. Cada usuario móvil usa un
miembro de una serie de funciones ortogonales representado la serie de
símbolos usados para transmisión [3].
Existen dos tipos de de códigos ortogonales los cuales son:
27 1.3.5 SECUENCIAS WALSH
Los códigos Walsh son formados por las filas de una matriz de , donde
sus valores son 0 o 1. Usualmente, donde es un entero. Esta
secuencia es generada usando la matriz de Hadamard. Esta matriz puede ser
generada de la siguiente manera cuando esta tiene dimensión de y está
dada por con n siendo un entero:
N N×
n
N =2 n
N
n
N =2
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = = N N N N N N H H H H H H H 2
1[0]
(1.8)
Donde HN contiene el complemento elemento de . La matriz entonces
puede verse de la siguiente manera:
N H ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 1 0 0 0 2 H
Por lo tanto, para derivar una serie de cuatro secuencias ortogonales
y , solo se necesitan generar una matriz de Hadamard de
orden 4, como se muestra a continuación: ,
,
, 1 2
0 w w
w w3
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 0 1 1 0 1 1 0 0 1 0 1 0 0 0 0 0 2 2 2 2 4 H H H H H
Las cuatro secuencias ortogonales en esta serie código Walsh son tomadas de
28
[
]
[
]
[
]
[
0 1 1 0]
1 1 0 0 1 0 1 0 0 0 0 0 3 2 1 0 = = = = w w w w
Con la ecuación 1.8 se pueden generar matrices Hadamard de altos órdenes
para obtener series de secuencias ortogonales [2, 3, 4].
Este tipo de códigos son empleados en múltiplexaje o propósitos de
señalización (debido a la ortogonalidad mutua que presenta es posible asignar
un código en cada canal lógico).
1.3.6 SECUENCIAS ORTOGONALES DE LONGITUD VARIABLE
Las secuencias de longitud variable son también conocidas como factor de
dispersión ortogonal variable (OVSF) [4]. Los OVSF se encargan del
esparcimiento de la señal. Los OVSF tienen dos características principales.
Una propiedad de ortogonalidad y el factor de que la ortogonalidad es
conservada entre los OVSFs de longitudes variables.
• La propiedad de ortogonalidad de los OVSF asegura que diferentes usuarios de la misma celda no interfieran con alguna otra. Si una señal
codificada con un OVSF dada es decodificada con un diferente OVSF,
la señal resultante tiene un igual número de 1s (-1) y 0s (+1). El
resultado es una señal nula promedio.
• El aspecto variable de los OVSF soporta diferentes tasas de datos del mismo código de árbol: bajas tasas de datos pueden ser codificadas
con OVSF’ s largos, mientras que las altas tasas de datos son
codificadas con OVSF’ s cortos. Un bit codificado con un OVSF de
longitud 256 puede ser representado por 256 chips, mientras un bit
codificado con OVSF de longitud 4 puede ser representado por 4 chips.
29 transmitir información. El impacto de esta redundancia es vista en la
ganancia de dispersión [6].
Para cada factor de dispersión SF =1,2,4,..., el cual es una potencia de 2, estos son códigos ortogonales obtenidos recurriendo a las siguientes
relaciones:
SF N =
[ , ] 0, 1, , 1
1 , , 1 , 0 ] , [ , , 1 2 , 2 , , 2 , 2 − = − = − = =
+ c c m SF
c SF m c c c m SF m SF m SF m SF m SF m SF L L (1.10)
Los símbolos [c,c] denotan la composición de los códigos [3, 4].
1.3.6.1 GENERACIÓN DE OVSF
Un método para obtener códigos ortogonales de longitud variable que
preserven su ortogonalidad entre diferentes tasas y SF’s está basado en una
matriz modificada de Hadamard. Dejando que sea una matriz de tamaño
y denotando la serie de códigos binarios de dispersión de -chips
de longitud,
{
}
, donde es la fila del vector de elementos y, esto es generado de
N
C
N
N× N N
N n N n
C ( ) =1,..., CN(n) N
n
N =2 CN2 como:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ) 2 ( ) 2 ( ) 2 ( ) 2 ( ) 2 ( ) 2 ( ) 2 ( ) 2 ( ) 1 ( ) 1 ( ) 1 ( ) 1 ( ) ( ) 1 ( ) 3 ( ) 2 ( ) 1 ( 2 2 2 2 2 2 2 2 2 2 2 2 N C N C N C N C C C C C C C C C N C N C C C C C N N N N N N N N N N N N N N N N N N M M (1.11)
Como resultado, estos códigos de longitud variable pueden ser generados
30 FIGURA 1.13 DIAGRAMA DE ÁRBOL
Se puede observar que comenzando de C1(1)=1, una serie de códigos de dispersión con la longitud de chips son generados en la kth capa. Esto
puede ser entendido de mejor manera observando la ecuación 1.11 que
generando códigos de la misma capa constituye una serie de funciones Walsh
y estas son ortogonales, aunque la fila de no es del mismo orden de .
k
2
k
2
N
C HN
Nos podemos dar cuenta que cualquier par de códigos de diferentes capas son
también ortogonales excepto en el caso que uno de los dos códigos sea el
código madre del otro; por ejemplo, todos y son
códigos madre de . En otras palabras, un código puede ser usado en el
canal si y solo si no otro código sobre el camino del código especifico para la
rama del árbol o el sub-árbol producido por el código especifico es usado en el
mismo canal, figura 1.14.
) 1 ( ) 1 ( ) 2
( 8 4
16 C C
C C2(1)
31 FIGURA 1.14 REGLAS DE CÓDIGOS NO PERMITIDOS PARA SU ASIGNACIÓN
Con la figura 1.14, se puede encontrar que si es asignado a un usuario
todos los códigos { }
generados de este código no pueden ser asignados para otros usuarios
solicitando tasas menores; en suma con los códigos madre ) 1 ( 8 C , ), 1 ( ), 8 ( , ), 1 ( ), 4 ( , ), 1 ( ), 2 ( ), 1
( 16 32 32 64 68 128
16 C C L C C L C C L
C
{
C4(1), C2(1)}
de no puede ser asignado para usuarios que soliciten altas tasas. Estosignifica que el número de códigos disponibles no es fijo pero depende de la
tasa y del factor de dispersión de cada canal físico [1, 10]. )
1 ( 8 C
1.4 ACCESO MÚLTIPLE
Las técnicas de acceso múltiple son de gran relevancia cuando hablamos de
sistemas de comunicaciones, tanto inalámbricos como fijos. El objetivo
fundamental de estas técnicas es permitir a varios usuarios compartir el uso de
los recursos de comunicaciones de forma eficiente [9].
Existen 4 técnicas que son importantes en los sistemas inalámbricos
comerciales [10]:
32 2. TDMA (Acceso múltiple por división de tiempo)
3. CDMA (Acceso múltiple por división de código)
4. OFDMA (Acceso múltiple por división de frecuencia ortogonal)
A su vez podemos ver diferentes aplicaciones en la utilización de técnicas de
acceso múltiple en sistemas militares y sistemas inalámbricos comerciales [11].
1.4.1 FDMA
En la técnica de acceso múltiple por división de frecuencia FDMA por sus siglas
en ingles, se divide en bandas de frecuencia con el mismo ancho, cada una de
estas bandas se asignan a un usuario durante el tiempo que dure su llamada.
Es común agregar una banda de guarda para compensar imperfecciones en
los filtros, interferencias entre canales adyacentes y dispersión espectral (figura
1.15).
Los recursos de comunicación CR por sus siglas en ingles se muestran| en la
figura 1.15. La asignación de un usuario a una banda de frecuencia puede ser
durante un periodo de tiempo largo o permanente; los recursos de
comunicación pueden contener diferentes señales que se encuentran por
33
BANDA DE FRECUENCIA 1 BANDA DE FRECUANCIA 2 BANDA DE FRECUANCIA 2
BANDA DE GUARDA
BANDA DE GUARDA F
R E C U E N C I A
TIEMPO
0
f
1
f
2
f
3
f
4
f
5
f
FIGURA 1.15 ACCESO MÚLTIPLE POR DIVISIÓN DE FRECUENCIA
Esta técnica presenta algunas desventajas. En los sistemas FDMA cada móvil
utiliza un sub-canal de banda angosta, del ancho de banda total, por lo cual
una parte importante del espectro de potencia es sacrificado [1].
1.4.2 TDMA
En TDMA, o acceso múltiple por división de tiempo, la información de los
usuarios es enviada en tramas, cada una de estas tramas consiste en un
número de ranuras de tiempo, las cuales tienen la misma duración. Cada
usuario es asignado a una ranuras de tiempo, y solo le será permitido
transmitir durante ese tiempo en todo el ancho de banda (figura 1.16) [12].
También se tienen tiempos de guarda para evitar que suceda una
superposición de señales entre diferentes usuario, y también estos tiempos de
34 RANURA DE
TIEMPO 1 RANURA DETIEMPO 2 RANURA DETIEMPO 3 F R E C U E N C I A TIEMP O T I E M P O D E G U A R D A T I E M P O D E G U A R D A
FIGURA 1.16 ACCESO MÙLTIPLE POR DIVISIÓN DE TIEMPO
1.4.3 CDMA
En la técnica de CDMA, los diferentes usuarios comparten el mismo medio
físico, esto es la misma banda de frecuencia y el mismo tiempo (figura 1.17).
Los diferentes usuarios pueden ser identificados y separados en el receptor por
medio de un código [13].
Usuario 1 Usuario 2 Usuario 3 Usuario... Potencia Frec uencia Tiempo
35 1.4.4 OFDMA
OFDM es un caso de transmisión con portadoras múltiples, donde la
información es transmitida sobre un número de portadoras de menor tasa o
subportadoras.
Cada subcanal se modula con un símbolo de separación y entonces los N
subcanales son multiplexados en frecuencia, lo cual es una buena medida para
evitar el traslape espectral de canales y eliminar la interferencia entre canales,
y esto a su vez conduce al uso ineficiente del espectro disponible.
Usando la técnica de modulación con portadoras múltiples con superposición
aprovechamos de una manera eficiente el ancho de banda como se muestra en
la siguiente figura 1.18.
FIGURA 1.18 CONCEPTO DE UNA SEÑAL DE OFDM
Para llevar a cabo esta técnica de portadoras múltiples con superposición, se
necesita reducir la interferencia entre subportadoras, lo cual significa que es
36
Referencias
[1] H. Vincent, Poor, “Wireless communications signal processing
perspectives”, Perntice Hall PTR.
[2] Erik, Ström, “An introduction to spread spectrum systems”, Department of
signals and systems chalmer university of technology, Göteborg, Sweden,
2002.
[3] Raymond, L,. Pickholtz, “Theory of spread spectrum communications – a
tutorial” IEEE Transactions on communications, vol. COM-30, No.5, pp.
855-883, mayo de 1982.
[4] Ir, J,. Meel, “Spread spectrum”, Polytechnic de nayer instituut, octubre de
1999.
[5] J,. Laiho, “Radio network planning and optimization for UMTS”, Jhon Wiley
& Sons Ltd, 2006.
[6] Valery, P,. Ipatov, “Spread Spectrum and CDMA principles and
applications”, Jhon Wiley & Sons, Ltd, 2005.
[7] K,. Fazel, “Multi-Carrier and Spread Spectrum Systems”, John Wiley &
Sons Ltd, 2003.
[8] C,. Nishan, Canagarajah, “Spread spectrum technology and wireless
microphone systems”, Lectrosonics,inc , abril de 1996.
[9] Simon, Haykin, “Communication Systems”, John Wiley & Sons Ltd, 2001.
[10] Andrea, Goldsmith,” Wireless communications”, Cambridge University
Press, 2005.
[11] M,.R,. Karim, “W-CDMA and cdma2000 for 3G Mobile Networks”,
McGraw-Hill, 2002.
[12] Bernard, Sklar, “Digital Communications Fundamentals and Applications”,
Prentice Hall, 2001.
[13] Henrik, Schulze, “Theory And Applications Of Ofdm And Cdma Wideband
CAPÍTULO 2
SISTEMAS WCDMA
El objetivo de este capítulo es conocer la estructura y el funcionamiento de un
sistema basado en WCDMA. Así como los modos de operación TDD y FDD.
Dentro de la estructura y funcionamiento del sistema se explicaran diferentes
procesos como la transferencia de llamada y la estructura de la capa física,
encargada de controlar el uso de los canales físicos, así como suministrar a las
capas superiores, 2 MAC y RRC, los datos generados mediante los canales
de transporte. También se revisaran las funciones de la capa física.
Dentro de la transferencia de llamada se verán los distintos modos que soporta
el estándar, así como su funcionamiento el cual es un aspecto relevante dentro
del sistema.
Posteriormente se revisaran los objetivos y mecanismos del control de
potencia, que es uno de los aspectos más relevantes de WCDMA debido a que
sin éste el sistema no podría operar. El control de potencia es necesario para
mitigar el efecto cerca-lejos y optimizar el consumo de la batería de un móvil. El
estándar WCDMA utiliza control de potencia rápido en ambos enlaces.
Finalmente se describen los servicios de datos, HSPA, HSDPA y HSUPA.
37
2.1 INTRODUCCIÓN A LOS SISTEMAS WCDMA
Los aspectos y características de un sistema WCDMA se presentan de la
siguiente manera: WCDMA es un sistema que utiliza acceso múltiple por
división de código y secuencia directa, es decir los bits de información de
usuario son dispersados sobre un ancho de banda mayor al de la señal
original por la multiplicación de los datos de usuario con los chips derivados
del código de dispersión de CDMA. También soporta tasas de bit muy altas
(para el enlace de subida a 2Mbps), y la tasa de chip es de 3.84 Mcps con un
ancho de banda de aproximadamente 5MHz. El gran ancho de banda de
WCDMA suporta altas tasas de datos de usuario, así como incrementa la
diversidad de trayectorias múltiples.
WCDMA soporta tasas de datos de usuario variables. La tasa de datos de
usuario es guardada constantemente durante cada 10 ms de trama. Sin
embargo la capacidad de datos entre los usuarios pueden cambiar de trama a
trama.
La interfaz aérea en WCDMA permitirá a los operadores implementar diferentes
receptores avanzados como son: antenas inteligentes y detección de
multiusuario, todo esto para incrementar la capacidad y cobertura del sistema.
En la tabla 2.1 se muestran los parámetros y características que poseen los
sistemas WCDMA.
38
CARACTERISTICAS DE LOS SISTEMAS WCDMA
Método de Acceso
Múltiple SD-CDMA
Método de Duplexaje
FDD
TDD
Sincronización de
estaciones base Operación Síncrona
Tasa de Chip 3.84 Mcps
Duración de Trama 10 ms
Servicio de Multiplexaje
Múltiples servicios con
diferente calidad de
requerimientos de
multiplexaje sobre una
conexión
Concepto de Multitasa Factor de dispersión
variable y multicódigo
Detección
Símbolos piloto usados
coherentemente o Pilotos
comunes
Detección Multiusuario,
antenas inteligentes
Soportado por el estándar,
es opcional en la
implementación
TABLA 2.1 CARACTERÍSTICAS DE LOS SISTEMAS WCDMA
39