INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECANICA Y ELECTRICA
SISTEMA DE CONTROL PARA MOTORES A PASOS
DE TIPO UNIPOLAR
T E S I S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A N
C. JOSÉ BERISTAIN LÓPEZ
C. PEDRO DANIEL ESPINOS VÁZQUEZ
ASESORES:
ING. JOSÉ LUIS AGUILAR JUAREZ
ING. CARLOS MARSCH MORENO
Instituto Politécnico Nacional.
Dedico este trabajo a Dios, a mis padres Raymundo y María Isabel, a mis hermanos
Margarito y Carlos, y finalmente a mi linda y adorada esposa
Delia, a los que adoro con todo mi corazón.
—JBL
El presente trabajo lo dedico a mi familia, profesores, a mi novia
y a esta gran institución de educación superior
A mis padres:
Por haberme brindado valiosos consejos, comprensión y apoyo sin condiciones ni medida. Además por guiarme sobre el camino de la educación.
A mi esposa:
Por sus consejos, apoyo incondicional y por su amor. Además por ceder su derecho a mi tiempo y atención para que pudiera llevar a cabo este trabajo.
A mis hermanos:
Por sus consejos, el apoyo que me han brindado en todo momento y por ser mis grandes amigos.
A mis asesores:
Por su apoyo y paciencia en brindar incondicionalmente su apoyo y conocimientos en la elaboración de este trabajo.
Ing. José Luis Aguilar Juárez.
Ing. Carlos Marsch Moreno.
A mis compañeros de trabajo:
Les agradezco el apoyo brindado durante el desarrollo de este trabajo, por compartir su experiencia y conocimientos.
Ing. Juan Antonio Soldán Romero.
Ing. Mario A. Castellanos López.
Ing. Miguel A. Vela López.
Lic. Juan Velázquez Castro.
Ing. Joel Torres Arias.
De igual manera agradezco a quienes me alentaron a esforzarme en concluir el presente trabajo.
Sra. Bertha García Avecilla.
Dra. Aline S. de Aluja
Dr. Andrés Aluja.
GRACIAS INFINITAMENTE A TODOS….
Agradecimientos:
A mi familia, profesores, a mi novia y a esta gran institución de educación superior, los cuales, nos han brindado todo su apoyo y dedicación en este largo camino para que este proyecto pudiera culminar en la obtención de nuestro título profesional.
A todos los que hicieron posible que se cumpliera esta meta mi más infinito y eterno agradecimiento porque también son parte fundamental de esta Tesis.
MIL GRACIAS POR ESTAR CON NOSOTROS.
i
El C. José Beristain López y el C. Pedro Daniel Espinos Vázquez pertenecen a la Generación 1999-2003 de la Carrera de Ingeniería en Control y Automatización en la Escuela Superior de Ingeniería Mecánica y Eléctrica Campus Zacatenco.
Desarrollamos un trabajo escrito cuyo objetivo es el desarrollo para la aportación de nuevos enfoques sobre el Control para motores a pasos de tipo unipolar.
El tema de tesis fue propuesto por los pasantes en la modalidad de tesis Colectiva.
Prólogo ... i
Introducción ... 3
Objetivo General ... 5
1.- INTRODUCCION A LOS MOTORES A PASOS ... 7
1.1 ¿Por qué motor a pasos? ... 7
1.2 Motores a pasos contra Servomotores. ... 7
1.2.1 Precio y Rendimiento ... 7
1.2.2 Características y complejidad. ... 10
1.2.3 Suavidad ... 10
1.2.4 Precisión... 11
1.2.5 Tamaño y Peso ... 11
1.2.6 Elección del Tipo de Motor. ... 11
1.3 El motor a pasos ... 12
1.4 Tipos de Motores a Pasos ... 13
1.5 Motores a pasos unipolares. ... 14
1.6 Características comunes de los motores a pasos ... 15
1.6.1 Tensión ... 15
1.6.2 Resistencia eléctrica ... 15
1.6.3 Grados por paso ... 15
1.7 Principio de operación de los motores a pasos ... 15
1.8 Secuencias para motores a pasos de Tipo Unipolar. ... 16
1.9 Tipos de Motores a Pasos ... 17
1.9.1 Motores a pasos de imán permanente: ... 18
1.9.2 Aplicaciones reales de posicionamiento. ... 18
1.9.3 Auto analizadores de Química Clínica- para la determinación in Vitro de magnitudes bioquímicas y turbidimétricas. ... 18
2 INTRODUCCION MICROCONTROLADOR ... 23
2.1 ¿Qué es un microcontrolador? ... 23
2.2 Descripción de los Microcontroladores ... 24
2.2.1 El mercado de los microcontroladores ... 25
2.2.2 ¿Qué microcontrolador emplear? ... 26
2.2.3 Herramientas para el desarrollo de aplicaciones ... 29
2.3 Elección y justificación del uso del Microcontrolador MC68HC11 de Motorola-Freescale. ... 30
2.3.1 Parámetros para una decisión ... 30
2.4 Descripción del Microcontrolador MC68HC11 de Motorola-Freescale. ... 35
2.4.1 Pines del MC68HC11 ... 37
2.4.2 Pines de configuración de los modos de arranque ... 39
2.4.3 Pines de los puertos de E/S ... 40
2.4.4 Programación de la CPU DEL MC68HC11 ... 41
2.5 Diseño de la etapa de control mediante microcontrolador. ... 51
2.6 Implementación de la etapa de Control ... 53
2.6.1 Hardware ... 53
2.6.2 Firmware ... 65
3 DISEÑO E IMPLEMETACION DEL INDEXER O DIRECCIONADOR ... 88
3.1 Señales de control. ... 88
3.2 Selección de velocidad. ... 90
3.3 Implementación del selector de velocidad ... 91
3.4 Selección de motor, tipo de paso, sentido de giro y tiempo de activación. ... 93
3.5 Implementación del tipo de paso y sentido de giro. ... 94
3.5.2 Contadores para generar las secuencias de control ... 96
3.6 Implementación con un GAL 16V8 ... 102
3.6.1 Programación del GAL16V8 ... 104
3.7 Implementación de la selección del motor y tiempo de activación. ... 106
4 DISEÑO E IMPLEMENTACION DEL DRIVER O ETAPA DE POTENCIA ... 111
4.1 Diseño del Driver o etapa de potencia ... 111
4.2 Implementación del Driver o etapa de potencia. ... 112
5 Diseño de software, integración e implementación de la aplicación ... 119
5.1.4 Visualizar Salidas... 119
5.1.5 Menú de Configuración ... 119
5.1.6 Interfase Gráfica: ... 120
5.1.7 Plataforma y Alcance del Sistema Operativo: ... 120
5.2 Diseño de Software... 120
5.2.1 Interfase Grafica... 120
5.2.2 Configurar Puerto RS-232 ... 121
5.2.3 Configurar dispositivo Demo ... 121
5.2.4 Inicio ... 122
5.2.5 Menú de configuración ... 124
5.3 Programación del software ... 136
5.3.1 Visual C# ... 136
5.3.2 Proyecto ... 136
5.3.3 Código fuente ... 137
5.3.4 Código objeto (.exe) ... 173
5.4 Operación de software ... 174
5.4.1 Pruebas de rutina... 174
5.4.2 Previas al código objeto. ... 174
5.4.3 Previas al proyecto de instalación. ... 174
5.5 Implementación de software ... 175
5.5.1 Primera fase- Desarrollo de aplicaciones ... 175
5.5.2 Segunda Fase.- Desarrollo de Instalador ... 175
5.5.3 Tercera Fase.- Manual de Usuario y distribución de la aplicación. ... 176
5.6 Mantenimiento de Software ... 176
5.7 Implementación del Software y Hardware. ... 177
6 Análisis de costo beneficio ... 179
6.1 Introducción. ... 179
6.2 Antecedentes ... 180
6.3 Marco de desarrollo y objetivos de estudio ... 180
6.4 Estudio de mercado ... 181
6.4.1 Definición del producto ... 181
6.4.2 Análisis de los datos de las fuentes obtenidas. ... 182
6.5 Estudio Técnico ... 190
6.5.1 Localización optima de la empresa ... 190
6.5.2 Descripción del proceso productivo. ... 190
6.5.3 Conclusiones del estudio técnico ... 202
6.6 Estudio Económico ... 203
6.6.1 Presupuesto del Costo de Producción ... 203
6.6.2 Presupuesto del costo de producción. ... 209
6.6.3 Presupuesto de gastos de Administración y Gasto de Venta ... 210
6.6.4 Costos Totales de Producción ... 213
6.6.5 Costos Totales de Operación ... 213
6.6.6 Inversión Inicial de Activo Fijo y Diferido ... 215
6.6.7 Depreciación y Amortización ... 216
6.6.8 Determinación TMAR ... 218
6.6.9 Determinación del capital de trabajo. ... 218
6.6.10 Financiamiento de la inversión ... 220
6.6.11 Determinación del punto de equilibrio ... 221
6.6.12 Determinación de los ingresos por venta sin inflación. ... 223
6.6.13 Balance General Inicial. ... 224
6.6.14 Estado de Resultados Proforma ... 225
6.6.15 Posición financiera inicial ... 228
6.6.16 Cronograma de Inversión: ... 229
6.7 Evaluación económica ... 230
6.7.1 VPN y TIR con producción constante, sin inflación, sin financiamiento... 230
6.7.2 VPN y TIR con producción constante, con inflación, sin financiamiento. ... 231
6.7.3 Cálculo del VPN y la TIR con producción constante, con inflación y con financiamiento. ... 232
6.7.4 Conclusiones y evaluación económica. ... 233
6.8 Estudio del costo beneficio del proyecto. ... 233
6.8.1 Impacto social y económico del proyecto en la comunidad ... 233
6.8.2 Generación empleo-ocupación ... 233
6.8.3 Productividad. ... 234
iii
6.8.5 Impacto regional ... 234
7 CONCLUSIONES ... 236
ANEXO A.- TARJETA DE EVALUACION ... 2
A.1 Usos para la tarjeta SIS68CPU ... 3
A.2 Descripción de la tarjeta SIS68CPU ... 3
A.2.1 Puertos de Entrada/Salida ... 3
ANEXO B.- IASM PCBUG11 THRSIM11 ... 12
B.1 PROGRAMA IASM11 ... 12
B.2 PROGRAMA PCBUG11 ... 14
B.2.1 VENTANAS DEL PCBUG ... 14
B.2.2 COMANDOS DEL PCBUG ... 15
B.3 PROGRAMA THRSIM11 ... 18
B.3.1 Especificaciones técnicas del Simulador THRSim11 ... 18
B.3.2 Simulación de Hardware externo ... 20
B.3.3 Ensamblador THRAss11 68HC11 ... 24
ANEXO C.- LENGUAJE ENSAMBLADOR ... 28
C.1 Lenguaje Ensamblador ... 28
C.2 Procesamiento de Ensamblado ... 28
C.3 PROGRAMAS EN LENGUAJE ENSAMBLADOR ... 29
C.3.1 Introducción ... 29
C.3.2 Formato de los Enunciados Origen ... 29
C.3.3 Campo de Etiquetas ... 29
C.3.4 Campo de Operaciones ... 30
C.3.5 Campo de Operandos ... 30
C.4 Salida del Ensamblador ... 33
C.5 FUNCIONAMIENTO DEL ENSAMBLADOR ... 33
C.5.1 Invocación del Ensamblador ... 33
C.5.2 Mensajes de Error ... 34
C.6 DIRECTRICES DEL ENSAMBLADOR ... 34
C.6.1 BSZ (BLOCK STORAGE OF ZEROS) ... 35
C.6.2 EQU (EQUATE SYMBOL TO A VALUE) ... 35
C.6.3 FCB (FORM CONSTANT BYTE) ... 35
C.6.4 FCC (FORM CONSTANT CHARACTER STRING) ... 36
C.6.5 FDB (FORM DOUBLE BYTE CONSTANT) ... 36
C.6.6 FILL (FILL MEMORY) ... 36
C.6.7 OPT (ASSEMBLER OUTPUT OPTIONS) ... 36
C.6.8 ORG (SET PROGRAM COUNTER TO ORIGIN) ... 36
C.6.9 PAGE (TOP OF PAGE) ... 37
C.6.10 RMB (RESERVE MEMORY BYTES) ... 37
C.6.11 ZMB (ZERO MEMORY BYTES) ... 37
C.7 FORMATO DEL LISTADO DEL ENSAMBLADOR... 37
ANEXO D.- LA COMUNICACIÓN ENTRE EL 68HC11 Y LA COMPUTADORA PERSONAL ... 40
D.1 El Programa de Arranque Bootstrap ... 40
D.1.1 Los modos de funcionamiento del micro ... 40
D.1.2 El modo de funcionamiento bootstrap ... 40
D.1.3 Descripción del programa de arranque bootstrap ... 40
D.1.4 Dialogando con el 68HC11 ... 41
D.2 Carga de programas en la memoria externa ... 46
D.3 El Formato .S19 de Motorola ... 47
D.4 Dígitos de relleno Byte de checksum ... 48
i
Lista de figuras.
Figura 1 — Diagrama de Bloques Sistema de Control para Motores a Pasos de Tipo Unipolar ... 4
Figura 2 — Motores a pasos Vs Servomotores ... 7
Figura 3 — El motor a pasos ... 12
Figura 4 — Distribución de las bobinas en un motor unipolar. ... 13
Figura 5 — Distribución de las bobinas en un motor bipolar. ... 13
Figura 6 — Distribución de bobinas de un motor unipolar. ... 14
Figura 7 — Principio de funcionamiento. ... 16
Figura 8 — Auto analizador de Química Clínica ... 18
Figura 9 — Aplicación de los motores en un Analizador para la toma de muestras y reactivos. ... 19
Figura 10 — Aplicación de un motor para el correcto posicionamiento de reactivos. ... 19
Figura 11 — Equipos Láser de Corte- para grabado, corte y marcado asistidos por computadora con 2 ó 3 ejes. ... 20
Figura 12 —Aplicación de motores para el movimiento del eje ―y‖ y ―z‖. ... 21
Figura 13 — Arquitectura básica de los Microcontroladores, a) Von Neumann b) Harvard. ... 28
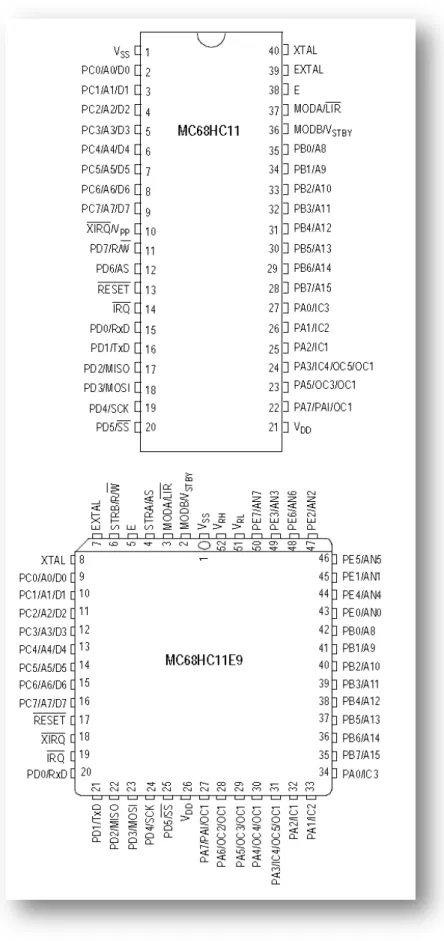
Figura 14 — Encapsulados de MC68CH11 ... 38
Figura 15 — Configuración del mapa de memoria para los diferentes modos de funcionamiento del 68HC11. ... 41
Figura 16 — Registros del 68HC11 ... 42
Figura 17 — Registro CCR ... 43
Figura 18 — Asignación de Puertos interfaz periférico programable 8255 ... 51
Figura 19 — Diagrama de bloques del sistema de control ... 53
Figura 20— Circuito de Reloj ... 54
Figura 21— Fuente de alimentación ... 54
Figura 22— Circuito de Reset ... 55
Figura 23— Diagrama de Bloques Interfase RS232 ... 57
Figura 24— Configuración del circuito MAX 232 ... 57
Figura 25— Configuración de modos de arranque ... 58
Figura 26— Demultiplexación ... 59
Figura 27 — Asignación de Puertos interfaz periférico programable 8255 ... 59
Figura 31— Diagrama electrico Etapa de control ... 62
Figura 32— Placa de Circuito Impreso ... 63
Figura 33— Simulacion Hardware 3D ... 64
Figura 34— Lectura de carácter en transmisión serial. ... 65
Figura 35— Diagrama de flujo comunicación ... 67
Figura 36— Estructura interna de la EEPROM ... 68
Figura 37— Diagrama de Flujo secuencia de tiempo ... 69
Figura 38— Diagrama de Flujo secuencia de borrado ... 71
Figura 39— Diagrama de Flujo secuencia de escritura. ... 72
Figura 39—Diagrama de bloques comunicación con interfase RS 232 ... 73
Figura 40—Diagrama de flujo aplicación FIRMLOAD parte 1 ... 74
Figura 41—Diagrama de flujo aplicación FIRMLOAD parte 2 ... 75
Figura 42—Diagramas de flujo subrutinas (EraseEEPROM, GetChar, GetByte, Hex2Bin, Delay 10ms) ... 76
Figura 43—Diagrama de flujo subrutinas (GetAdress, Write) ... 77
Figura 44— Aplicación Concepto ... 82
Figura 45— Aplicación Concepto (Banda de alimentación) ... 83
Figura 46— Aplicación Concepto (Brazo) ... 83
Figura 47— Aplicación Concepto (mecanismo de columna)... 84
Figura 48— Aplicación Concepto (Plato) ... 84
Figura 49— Diagrama de Flujo Aplicación Concepto ... 87
Figura 50 — Diagrama de Bloques Indexer ... 88
Figura 51 — Diagrama de Bloques Módulos del Indexer ... 90
Figura 52 — Diagrama de Bloques Selector de velocidad ... 90
Figura 53 — Generador de Pulso ... 91
Figura 54 — Regulador de Voltaje ... 92
Figura 55 — Divisor de Frecuencias ... 92
Figura 56 — Multiplexor selector de velocidad ... 93
Figura 57— Diagrama de Bloques selección de motor, tipo de paso, sentido de giro y tiempo de activación . 93 Figura 58 — Mapa de estados contador de 2 Bits ascendente ... 98
Figura 59 — Mapa de estados contador de 2 Bits ... 99
iii
Figura 61— Mapa de estados contador de 3 Bits descendente ... 101
Figura 62 — El dispositivo GAL16V8 ... 103
Figura 63 —Formato del archivo ―motor1. eqn‖. ... 104
Figura 64 — Estados de entrada y salida. ... 105
Figura 65 — El CI 74HC245 ... 105
Figura 66 —Conexiones para el GAL16V8. ... 106
Figura 67 —Diagrama Indexer o Direccionador ... 107
Figura 68 — Esquema de Indexer o Direccionador ... 108
Figura 69 — Simulación 3D Indexer o Direccionador ... 109
Figura 70 — Diagrama de bloques del driver o etapa de potencia. ... 111
Figura 71 — Diagrama de bloques interno del driver o etapa de potencia. ... 112
Figura 72 — Diagrama de Conexión con la EEPROM ... 114
Figura 73 — Diagrama del Transistor ... 114
Figura 74 — Conexión de opto acopladores con transistores. ... 115
Figura 75 — Diagrama Driver o Controlador o Etapa de Potencia. ... 116
Figura 76 — Esquema Driver o Controlador o Etapa de Potencia. ... 117
Figura 77 — Simulación 3D Driver o Controlador o Etapa de Potencia ... 118
Figura 78 — Pantalla Inicial ... 120
Figura 78 — Pantalla Configuración Puerto RS-232 ... 121
Figura 79 — Pantalla Configuración de Dispositivo ... 122
Figura 80 — Pantalla Inicio ... 122
Figura 81 — Pantalla aplicación concepto ... 123
Figura 82 — Diagrama de bloques aplicación SCMAP ... 124
Figura 83 — Diagrama de Flujo Menú Principal (PrincipalForm) ... 125
Figura 84 — Diagrama de Flujo Pantalla Splash (SplashForm) ... 126
Figura 85 — Diagrama de Flujo Menú Inicio (InicioForm) ... 126
Figura 86 — Diagrama de Flujo Menú de Configuración (configuraForm) y subrutina configuración de parámetros. ... 127
Figura 87 — Diagrama de Flujo Menú de Parámetros de comunicación (PuertoForm) y subrutina Sendport128 Figura 88 — Diagrama de Flujo Pantalla Acerca de (AcercadeForm) ... 129
Figura 92 — Diagrama de Flujo de Subrutinas Concatena y Compila ... 132
Figura 93 — Diagrama Flujo Cuadro de Firmware (FirmwareForm) ... 133
Figura 94— Diagrama de Flujo Subrutina Send ... 134
Figura 95 —Diagrama de Flujo Pantalla Concepto (ConceptoForm) y subrutinas carga de parámetros, variables en hexadecimal ... 135
Figura 96 — Estructura general de la evaluación de proyectos. ... 179
Figura 97 — Análisis de la demanda. ... 182
Figura 98 — Clientes potenciales y su sector económico. ... 183
Figura 99 — Sectores que requiren sistemas a pasos y su demanda ... 184
Figura 100 — Cotización del Sistema CMMS-ST-C8 de FESTO Industrial Automation. ... 185
Figura 101 — Cotización del Sistema de control de Anaheim Automation. ... 187
Figura 102 — Diagrama de Bloques Sistema de Control para Motores a Pasos Tipo Unipolar... 191
Figura 103 — Bloques Sistema de Control para Motores a Pasos Tipo Unipolar ... 192
Figura 104 — Diagrama de flujo de proceso. ... 194
Figura 105 — Proceso productivo. ... 200
Figura 106 — Organigrama. ... 201
Figura 107 — Plano general ... 202
Figura 108 — Grafica del costo de Producción ... 210
Figura 109 — Grafica del costo total de operación. ... 214
Figura 110 — Grafica del Punto de equilibrio. ... 222
Figura 111 — Diagrama de flujo dela evaluación económica sin inflación, sin financiamiento y con producción constante. ... 230
Figura 112 — Diagrama de flujo dela evaluación económica con inflación, sin financiamiento y con producción constante ... 231
Figura 113 — Diagrama de flujo para la evaluación económica con inflación, financiamiento y producción constante ... 232
Figura 114 — Tarjeta de evaluación SIS68CPU ... 2
Figura 115 — Esquema del microcontrolador MC68HC11 ... 3
Figura 116 — Puerto A ... 4
Figura 117 — Todos los usos de los bits del puerto B. ... 4
Figura 118 — Usos de los bits del puerto C. ... 5
Figura 120 — Puerto D ... 6
v
Figura 122 — Usos de los bits del puerto E. ... 7
Figura 123 — Configuración de pines en el sistema de desarrollo SIS68CPU ... 7
Figura 124 — Conectores y selección de modo de operación ... 8
Figura 125 — Sistema de desarrollo SIS 68CPU ... 9
Figura 126 — Sistema de desarrollo SIS 68CPU ... 10
Figura 127 — Ventana del IASM11 ... 12
Figura 128 — Caja de simulación ... 20
Figura 129 — Medición de Resistencia ... 20
Figura 130 — Medición de Capacitancia ... 21
Figura 131 — Potenciómetros ... 21
Figura 132 — Transmisor y receptor serie. ... 22
Figura 133 — Simulador de la interfaz gráfica de usuario ... 22
Figura 134 — Pantalla Principal THRSIM ... 23
Figura 135 — Interfase gráfica de Usuario con tarjeta de desarrollo... 24
Figura 136 — Protocolo empleado para ‘dialogar‘ con el programa BOOTSTRAP. ... 42
Figura 137 — Diagrama de flujo del programa bootstrap y Diagrama de flujo de un programa en la Computadora Personal ... 43
Figura 138 — S103C ... 44
Figura 139 — Número bytes línea Dirección comienzo Campo de datos Checksum ... 47
i
Lista de tablas.
iii
1
SISTEMA DE CONTROL
PARA MOTORES A PASOS
3
Introducción
El presente proyecto de tesis tiene su origen en las aplicaciones de Control y Automatización, que requieren la implementación de Sistemas para control de movimiento. Algunas de estas aplicaciones de movimientos son para regular por ejemplo variables de posición, velocidad, aceleración y par de fuerza.
Este tipo de variables son típicas en operaciones que implican el desplazamiento de elementos en la línea de producción, así como en aplicaciones especializadas, tales como equipos de análisis de clínica médica, control numérico computarizado, robótica, soldadura láser, cortadoras de plasma, entre otras.
Un motor a pasos resuelve en gran medida esta necesidad, ya que su principio de funcionamiento le permite realizar pequeños movimientos (pasos), con gran exactitud y precisión. Los motores a pasos son capaces de brindar un posicionamiento muy preciso sin el uso de dispositivos de retroalimentación complicados y caros, aunque se pueden incorporar si se desea.
Los motores a pasos se han convertido en alternativas viables a sistemas neumáticos, hidráulicos y sistemas de servomotores. Gracias a que obtenemos los siguientes beneficios:
Un diseño efectivo y un bajo costo.
Alta confiabilidad
Libres de mantenimiento (no disponen de escobillas)
Lazo abierto (no requieren dispositivos de retroalimentación)
Aunque el motor a pasos ha sido oscurecido en el pasado por sistemas de servomotores de CD para el control del movimiento, ahora surge como una tecnología alternativa en cada vez más áreas. El mayor factor es la tendencia al uso del control digital, y de la utilización del Microcontrolador.
En México actualmente para adquirir los sistemas de control por motores a pasos es necesario importarlos, lo que da como resultado un elevado costo, además de que para que funcione se requiere adquirir varios módulos, lo cual eleva aún más el costo, por cada motor y genera una problemática para aplicaciones que requieran varios de ellos.
A partir de esta necesidad y proponiendo una solución a esta problemática se diseña un Sistema de Control para Motores a Pasos que consiste en:
Diseño e implementación de la etapa de control, mediante Microcontrolador.
Diseño e implementación de un indexer o direccionador.
Diseño e implementación de un driver o etapa de potencia.
4
A pesar de que se diseña la etapa de control mediante Microcontrolador, no se limita al uso exclusivo del mismo, ya que el sistema puede ser controlado por diferentes dispositivos capaces de controlar, como son: PLC´s , computadoras industriales, entre otros. Con el objeto de evitar en cierta medida la dependencia tecnológica del extranjero y en consecuencia reducir costos en las aplicaciones de control y automatización.
El sistema de control para motores a pasos se estructura como se muestra en la figura 1.
5
Objetivo General
Implementar un sistema de control de motores a pasos aplicable a múltiples procesos a un bajo costo
Objetivos Particulares
Diseñar e implementar un direccionador (indexer) para el sistema de control.
Diseñar e implementar un controlador (driver) para el sistema de control
7
1.- INTRODUCCION A LOS MOTORES A PASOS
1.1 ¿Por qué motor a pasos?
Para las aplicaciones de control, automatización y de diferentes ramas de la electrónica, que requieren de sistemas para control de movimiento de alta precisión, posicionamiento mecánico, accionamiento de válvulas entre otros elementos, existe la posibilidad de elegir entre el uso de servomotores o de motores a pasos, ambos ofrecen prestaciones similares para posicionamientos precisos, pero difieren en algunos aspectos. Típicamente se conoce que los motores a pasos "tienen menor costo", y que los servomotores "son más rápidos". Sin embargo para tomar una decisión inteligente se realiza una comparación.
Figura 2 — Motores a pasos Vs Servomotores
1.2 Motores a pasos contra Servomotores.
Para determinar el tipo de motores a emplear para el desarrollo del sistema de control, se realiza una comparación de características, las cuales son mencionadas en los siguientes incisos, resultando la justificación y elección del tipo de motor.
1.2.1 Precio y Rendimiento
8
1.2.1.1 Sistema No. 1
Emplea un motor a pasos y una unidad de control. Esta unidad de control puede ser programada por el usuario para operar en modo "autónomo" o que pueda recibir comandos a través de una PC, PLC u otro tipo de equipo.
1.2.1.2 Sistema No. 2
Emplea un servomotor de 100w y una unidad de control que incluye todas las funciones de programación de la unidad de control del motor a pasos, además mejoras relacionadas con el servomotor.
La tabla 1 muestra la lista de precios del sistema 1 y 2, así como de 2 sistemas más, que serán discutidos más adelante. La unidad de control del servomotor cuesta $200 dólares más que la unidad de control para el motor a pasos y el servomotor cuesta $399 dólares más que el motor a pasos. Típicamente los sistemas de servomotores cuestan más que los motores a pasos.
La tabla 2 indica la potencia máxima continua de cada sistema. El motor a pasos a 900 RPM genera un par de fuerza de 0.78 Newton- metro.
En ésta comparación, la potencia del servomotor a 3000 RPM es mucho más grande que la del motor a pasos, que puede o no ser bueno. Si la aplicación requiere un alto par de fuerza a baja velocidad, entonces para el servomotor se requiere "cambiar velocidad por par de fuerza". Los servomotores generalmente tienen menor par de fuerza que los motores a pasos (de potencia equivalente) a bajas revoluciones, pero son capaces de trabajar más rápido, para reducir el inconveniente se puede realizar ciertas modificaciones que se analizan posteriormente.
SISTEMAS
Descripción
Precios en dólares.
1
Motor a
Pasos
2
Servomotor
3
Servomotor
4
Servomotor
Unidad control motor a pasos
$375.00
Unidad control Servomotor
$575.00
$575.00
Unidad control Servomotor
$680.00
Motor a pasos
$106.00
Servomotor
$505.00
$505.00
Servomotor
$590.00
Reductor (3:1)
$453.00
Costo Total
$481.00
$1,080.00
$1,533.00
$1,270.00
Tabla 1 — Precios de los componentes y sistemas
Sistema 1
Sistema 2
Potencia
42v Step Drive
Servo Drive
Motor a pasos
Servomotor
Potencia continua [W]
73
100
Velocidad [RPM]
900
3000
Par de fuerza [N-m]
0.78
0.32
9
Par de fuerza
42v Step Drive
Servo Drive
Motor a pasos
Servomotor
Potencia continua [W]
73
100
Velocidad [Rev./s]
15
50
Velocidad [RPM]
900
3000
Par de fuerza [N-m]
110
45
Par de fuerza [N-m]
0.78
0.32
Par de fuerza a RPM [oz-in]
300
140
45
1800
50
45
Par de fuerza a RPM [N-m]
300
0.99
0.32
1800
0.35
0.32
3000
0.16
0.32
Sistema 2 y 3 48V
Sistema 4 48V
Servo Drive
Servo Drive
Motor c/ reductor 3:1
Motor
Potencia continua [W]
100
200
Velocidad [Rev./s]
16.67
50
Velocidad [RPM]
1000
3000
Par de fuerza [N-m]
135
90
Par de fuerza [N-m]
0.95
0.64
Par de fuerza a RPM [oz-in]
300
135
90
1800
0
90
Par de fuerza a RPM [N-m]
300
0.95
0.64
1800
0
0.64
3000
0
0.64
10
1.2.1.3 Sistema No. 3
Similar al sistema 2 emplea un servomotor de 100w, una unidad de control, y un reductor (3:1) para limitar la velocidad de salida del servomotor, tiene la limitante de que si el sistema es requerido para alguna aplicación de alta velocidad como un recorrido rápido, el servomotor con reductor no puede lograrlo. La adición del reductor (3:1) hace que el costo total del sistema sea de $1533 dólares en comparación con solo $481 dólares que el sistema a pasos lo cual empeora la economía. En condiciones normales el servomotor se limita a una velocidad de 3000 RPM y 5000 RPM pico. Con la reducción de 3:1 de la caja de engranes la velocidad a la salida se limita a 1000 RPM y 1666 RPM pico.
Otra solución a la velocidad para alto par de fuerza a baja velocidad es utilizar un servomotor más grande. Lo cual requiere también una unidad de control más grande. Lo que hace que sea aún más caro, el sistema 4.
Como se observa en la tabla 3, el par de fuerza de salida de un servomotor de mayor potencia es solo 0.64 Newton-metro, pero esto puede ser suficiente. Mientras que los motores a pasos deben ser operados con un aumento de par de fuerza porque pueden experimentar una reducción en él par de fuerza debido a la resonancia. Como regla general, un motor a pasos de 0.99 Newton-metro no puede ser operado a 0.64 Newton-metro.
Estamos comenzando a formular algunos límites a los que cada motor puede aplicarse.
A una velocidad de 900 RPM El sistema de motor a pasos tiene superior par de fuerza y precio. A una velocidad de 1800 RPM, el motor a pasos tiene más par de fuerza por el precio.
A continuación analizamos algunos otros aspectos importantes.
1.2.2 Características y complejidad.
Por naturaleza, los servomotores son de circuito cerrado, el motor debe estar conectado a un dispositivo de retroalimentación, generalmente un codificador óptico o de resolución. Esta información le dice al controlador de dispositivo donde se encuentra en cualquier momento el motor y la carga. También proporciona la velocidad. Los motores a pasos también pueden emplear retroalimentación pero no de la misma manera, suelen ser más baratos y no son igual que los empleados en los servomotores, sino más bien buscan comprobar que el motor no se ha estancado o se ha modificado su posición por alguna fuerza externa. El servomotor ajusta constantemente su sistema mediante señales para el motor basado en la información de retroalimentación, esto permite a los servomotores superar la mayoría de las perturbaciones inesperada. Los servomotores también pueden compensar automáticamente la resonancia. Lo que resulta eficiente utilizando solo la cantidad de energía necesaria para ser trasladado.
Hay límites a los sistemas de control con servomotores. Uno de estos límites es el Angulo de inercia. Tradicionalmente, algunos fabricantes de unidades de control para servomotores han recomendado un límite de 10:1 la carga del motor en el radio de inercia
1.2.3 Suavidad
11
1.2.4 Precisión
Debido a que un servomotor tiene un dispositivo de retroalimentación de posición, es de esperarse un posicionamiento más preciso. Los motores a pasos son normalmente sistemas de lazo abierto, lo que puede afectar la precisión.
1.2.5 Tamaño y Peso
El hardware para control de movimiento debe minimizarse, con el fin de ajustarse a éste mundo cambiante. Los servomotores tienen ventaja en muchas aplicaciones porque los motores son ligeros y pequeños. Pero cabe señalar que los motores a pasos son más pequeños que los servomotores, ya que no requieren codificador. Si bien los servomotores pueden ser reducidos en tamaño y energía, su codificador tiene sus límites debido a la electrónica y sensor óptico, En tamaños menores de 40mm, el codificador se convierte en un gran porcentaje del tamaño del motor.
En conclusión las principales ventajas de los motores a pasos son: Alto par de fuerza a bajas velocidades
Bajo costo
Sencillez
Los servomotores de CD deben usarse cuando el mayor costo es justificado por: Par de fuerza en altas velocidades
Tamaño compacto y poco peso
La precisión y suavidad
Control de lazo cerrado
1.2.6 Elección del Tipo de Motor.
Evaluando las prestaciones y características de los motores, buscamos obtener el rendimiento necesario con el menor costo.
12
1.3 El motor a pasos
Un motor a pasos, es una máquina eléctrica en la que sus devanados se energizan uno después del otro, estas excitaciones provocan un giro discontinuo en un ángulo que se determina por la posición que toma el eje. Este es capaz de transformar información digital, en movimientos mecánicos, el eje del motor gira un determinado ángulo por cada impulso de entrada, el resultado final del movimiento es fijo y repetible, produce un posicionamiento preciso y fiable, el sentido de rotación del motor se define con el sentido de excitación de las bobinas que al ser excitados con impulsos, actúan sobre un núcleo de hierro dulce ó de imán permanente y lo hacen girar un ángulo determinado, la velocidad de rotación del eje del motor [N] en revoluciones/minuto es:
N = 60 f
n
Dónde: f = frecuencia de los impulsos;n = número de bobinas.
El desplazamiento angular al pasar de una bobina a otra es de 2/n, lo que representa una conversión de señales digitales de excitación a una posición angular discontinua definida sobre el eje del motor. Al desplazamiento se le denomina paso angular y es precisamente lo que caracteriza a este tipo de motores, ya que funcionan en pasos con un ángulo determinado.
Según el sentido de excitación de las bobinas, se producen pasos hacia la derecha ó hacia la izquierda, de acuerdo con el diseño del motor y su utilización prevista, los impulsos de excitación son de la misma polaridad, ó son impulsos automáticos con polaridad opuesta, la sucesión de los impulsos se aplica a la misma bobina del motor ó sucesivamente a las diferentes bobinas del mismo, los impulsos no se aplican necesariamente a una frecuencia fija, la frecuencia sé varía desde cero hasta la frecuencia máxima que permita el motor, un motor a pasos es capaz de girar en ambos sentidos, un número exacto de grados con incrementos mínimos que se determinan por el diseño de su construcción, este incremento está comprendido entre 0.72 y 90, correspondientes a 500 pasos y 4 pasos por revolución, respectivamente, aunque el motor a pasos es de concepción antigua, solo se emplea en la práctica a partir de la aparición de los modernos semiconductores, con los cuales se implementan los circuitos para la regulación y el control del motor.
13
1.4 Tipos de Motores a Pasos
En los motores a pasos debemos diferenciar los unipolares de los bipolares. Los motores unipolares se llaman así porque la corriente que circula por las diferentes bobinas siempre circula en el mismo sentido, (figura 4), en los bipolares para que estos funcionen la corriente que circula por las bobinas cambia de sentido en función de la tensión que se aplica (figura 5) por lo que una misma bobina puede tener en uno de sus extremos distinta polaridad (bipolar). Algunos motores tienen las bobinas de tal manera que en función de los puentes pueden convertirse en unipolares o bipolares.
Lo importante es distinguir el tipo de motor a que se refiere, la potencia, el número de pasos, el par de fuerza, la tensión de alimentación y si se refiere a un motor sencillo.
Figura 4 — Distribución de las bobinas en un motor unipolar.
Figura 5 — Distribución de las bobinas en un motor bipolar.
14
Con respecto a los motores bipolares la dificultad está en controlar la alimentación, cambiar la polaridad y el ritmo de las bobinas para conseguir el ritmo necesario el cual permitirá que este funcione correctamente. Diferentes configuraciones de motor regulan los pasos que da el motor para girar una vuelta completa, los más comunes son de 48, 100 y 200 pasos. En función del tipo de husillo y la precisión que queramos obtener elegiremos un motor u otro.
Este proyecto se desarrolla empleando Motores a Paso tipo Unipolar, debido principalmente a la dificultad para encontrar sistemas electrónicos capaces de controlarlos, no así en el caso de los motores a pasos tipo bipolar.
1.5 Motores a pasos unipolares.
Los motores unipolares se pueden controlar, gracias a que poseen devanados duplicados. Aunque para facilitar, en el esquema (Figura 6) se dibuja este devanado como una bobina con punto medio, en realidad tienen dos bobinas en cada eje del estator, que están unidas por extremos opuestos, de tal modo que al ser alimentada una u otra, generan cada una un campo magnético inverso al de la otra. Nunca se energizan juntas, por eso lo correcto es decir que tienen una doble bobina, en lugar de decir (como se hace habitualmente) que es una bobina con punto medio. Esta duplicación se hace para facilitar el diseño del circuito de manejo, ya que permite el uso, en la parte de potencia, de un transistor único por cada uno de los bobinados.
Figura 6 — Distribución de bobinas de un motor unipolar.
15
1.6 Características comunes de los motores a pasos
Un motor a pasos se define por los siguientes parámetros básicos:
1.6.1 Tensión
Los motores a pasos tienen una tensión eléctrica de trabajo. Este valor viene impreso en su carcasa o por lo menos se especifica en su hoja de datos. Algunas veces puede ser necesario aplicar un voltaje superior para lograr que un determinado motor cumpla con el par de fuerza deseado, pero esto producirá un calentamiento excesivo y/o acortará la vida útil del motor.
1.6.2 Resistencia eléctrica
Otra característica de un motor a pasos es la resistencia de las bobinas. Esta resistencia determinará la corriente que consumirá el motor y su valor afecta la curva de par de fuerza del motor y su velocidad máxima de operación.
1.6.3 Grados por paso
Generalmente, este es el factor más importante al elegir un motor a pasos para un uso determinado. Este factor define la cantidad de grados que rotará el eje para cada paso completo. Una operación de medio-paso o semi-paso del motor duplicará la cantidad de pasos por revolución al reducir la cantidad de grados por paso. Cuando el valor de grados por paso no está indicado en el motor, es posible contar a mano la cantidad de pasos por vuelta, haciendo girar el motor y sintiendo por el tacto cada "diente" magnético. Los grados por paso se calculan dividiendo 360 (una vuelta completa) por la cantidad de pasos que se contaron. Las cantidades más comunes de grados por paso son: 0,72°, 1,8°, 3,6°, 7,5°, 15° y hasta 90°.
A este valor de grados por paso usualmente se le llama la resolución del motor. En el caso de que un motor no indique los grados por paso en su carcasa, pero sí la cantidad de pasos por revolución, al dividir 360 por ese valor se obtiene la cantidad de grados por paso. Un motor de 200 pasos por vuelta, por ejemplo, tendrá una resolución de 1,8° por paso.
1.7 Principio de operación de los motores a pasos
La secuencia de operación de un motor y su principio de funcionamiento es el siguiente:
Conforme a la figura 7. Iniciando con la bobina A, se energiza haciendo circular la corriente de A en dirección C por lo cual el polo superior se polariza positivamente, atrayendo al polo sur del rotor (parte superior del rotor), y el inferior negativamente el cual atrae, al polo norte del rotor, (parte inferior del rotor).
Posteriormente para realizar el primer paso en sentido de las manecillas del reloj, sea la bobina B, ahora alimentada. Haciendo circular la corriente de B hacia D, el polo de la derecha se polariza positivamente atrayendo al polo sur del rotor (parte superior del rotor), y el de la izquierda negativamente, el cual atrae, al polo norte del rotor, (parte inferior del rotor), de tal manera que realiza su primer paso.
16
Siguiendo con un tercer paso en el mismo sentido, sea la bobina D, ahora alimentada en sentido contrario es decir haciendo circular la corriente de D hacia B. El polo de la derecha se polariza negativamente atrayendo al polo norte del rotor (parte inferior del rotor), y el de la izquierda positivamente, el cual atrae, al polo sur del rotor, (parte superior del rotor).
Por último para completar el ciclo, volvamos a conectar las bobinas como al inicio por lo cual el rotor girará un cuarto pasó. Si el ciclo se vuelve repetitivo podremos observar el movimiento del rotor en sentido de las manecillas del reloj. La velocidad dependerá de la activación y desactivación de las bobinas. Como podremos observar, 4 pasos fueron necesarios para que el motor girará 90 grados de su posición original, si quisiéramos que el motor girara una vuelta completa tendríamos que darle 12 pasos, es decir repetir el ciclo 4 veces.
Figura 7 — Principio de funcionamiento.
1.8 Secuencias para motores a pasos Tipo Unipolar.
Estas secuencias siguen el orden indicado en cada tabla para hacer que el motor gire en un sentido, si se desea que gire en sentido opuesto, sólo se debe invertir dicha secuencia.
Básicamente hay 3 formas de controlar estos motores a pasos, la primera es realizar una secuencia que activa una bobina por pulso, a la que llamamos paso sencillo.
No. De Paso
A
B
C
D
Paso 1
1
0 0
0
Paso 2
0
1
0
0
Paso 3
0
0
1
0
Paso 4
0
0
0
1
Tabla 4 — Secuencia de paso sencillo.
17
La segunda forma es activar las bobinas en pares, en este caso el campo magnético se duplica, y en consecuencia el motor tiene mayor fuerza de giro y retención a la que llamamos paso normal, la secuencia es la siguiente:No. De Paso
A
B
C
D
Paso 1
1
1
0
0
Paso 2
0
1
1
0
Paso 3
0
0
1
1
Paso 4
1
0
0
1
Tabla 5 — Secuencia de paso normal.
La tercera es una combinación de las dos anteriores, y conocida como secuencia de medio paso, en la cual obtenemos un mayor par de fuerza en la operación del motor.
No. De Paso
A
B
C
D
Paso 1
1
0
0
0
Paso 2
1
1
0
0
Paso 3
0
1
0
0
Paso 4
0
1
1
0
Paso 5
0
0
1
0
Paso 6
0
0
1
1
Paso 7
0
0
0
1
Paso 8
1
0
0
1
Tabla 6 — Secuencia de medio paso.
1.9 Tipos de Motores a Pasos
Los motores a pasos se dividen en dos categorías principales: de imán permanente y de reluctancia variable. También existe una combinación de ambos, a los que se les llama híbridos.
18
Los motores del tipo de reluctancia variable, en cambio, poseen un rotor de hierro dulce que en condiciones de excitación del estator, y bajo la acción de su campo magnético, ofrece menor resistencia a ser atravesado por su flujo en la posición de equilibrio. Su mecanización es similar a los de imán permanente y su principal inconveniente radica en que en condiciones de reposo (sin excitación) el rotor queda en libertad de girar y, por lo tanto, su posicionamiento de régimen de carga dependerá de su inercia y no será posible predecir el punto exacto de reposo. El tipo de motor de reluctancia variable consiste en un rotor y un estator cada uno con un número diferente de dientes. Ya que el rotor no dispone de un imán permanente, gira libremente si no tiene corriente alimentándolo, o sea que no tiene par de fuerza de detención.
Los motores híbridos combinan las mejores características de los de reluctancia variable y de imán permanente. Se construyen con estatores multi-dentados y un rotor de imán permanente. Los motores híbridos estándar tienen 200 dientes en el rotor y giran en pasos de 1,8 grados. Existen motores híbridos con configuraciones de 0,9° y 3,6°. Dado que poseen alto par de fuerza estático y dinámico y se mueven a muy altas velocidades de pulso, se los utiliza en una amplia variedad de aplicaciones industriales.
1.9.1 Motores a pasos de imán permanente:
Los motores a pasos de imán permanente se dividen a su vez en distintos tipos, diferenciados por el tipo de bobinado. Existen entonces motores a pasos de imán permanente unipolares (también llamados "unifilares"), bipolares (también llamados "bifilares") y multifase.
1.9.2 Aplicaciones reales de posicionamiento.
Aunque el motor a pasos haya sido oscurecido en el pasado por sistemas de servomotores de CD para el control del movimiento, ahora surge como la tecnología preferida en cada vez más áreas. El factor mayor en esta tendencia es la frecuencia del control digital, y del empleo del microprocesador ó microcontrolador. Actualmente contamos son bastantes aplicaciones de posicionamiento con motores a pasos:
1.9.3 Auto analizadores de Química Clínica- para la determinación in Vitro de magnitudes bioquímicas y turbidimétricas.
19
Figura 9 — Aplicación de los motores en un Analizador para la toma de muestras y reactivos.
20
Figura 11 — Equipos Láser de Corte-para grabado, corte y marcado asistidos por computadora con 2
21
.Figura 12 — Aplicación de motores para el movimiento del eje ―y‖ y ―z‖.
Otros ejemplos:
Centros maquinado CNC
Máquinas para aplicación de etiquetas
Impresión de Formas continúas.
Posicionamiento
23
2 INTRODUCCION MICROCONTROLADOR
Desde el punto de vista de control, podemos recordar que hubo un tiempo en que los sistemas de control se hacían exclusivamente con componentes discretos lógicos, formando cajas grandes y pesadas. Poco después, se utilizaron microprocesadores donde el sistema de control entero podía encajar dentro de una tarjeta de circuito impreso. Esto es común todavía, pueden encontrarse muchos sistemas impulsados por uno de los microprocesadores comunes de 8 bits (Zilog Z80, Intel 8088, Motorola 6800, y otros).
El continuo avance tecnológico que va de la mano con el proceso de miniaturización, ha hecho que todos los componentes que se requerían para un sistema de control se construyan dentro de un solo circuito integrado. En 1980 aproximadamente, los fabricantes de circuitos integrados iniciaron la difusión de un nuevo circuito para control, medición e instrumentación al que llamaron microprocesador en un sólo circuito o de manera más exacta MICROCONTROLADOR.
2.1 ¿Qué es un microcontrolador?
Un microcontrolador es un circuito integrado programable que contiene toda la estructura (arquitectura) de un microprocesador, o sea CPU, memorias RAM, ROM EEPROM; y puertos digitales de entrada y salida. Algunos microcontroladores más especializados poseen además convertidores análogo-digitales, temporizadores, comparadores, capturadores y un sistema para permitir la comunicación serial asíncrona y sincrona. La CPU permite que el microcontrolador pueda ejecutar instrucciones almacenadas en una memoria.
Se puede decir entonces que es una evolución del microprocesador, al añadirle a éste último las funciones que antes era necesario situar externamente con otros circuitos. El ejemplo típico esta en los puertos de entrada/salida y en la memoria RAM, en los sistemas con microprocesadores es necesario desarrollar una lógica de control y unos circuitos para implementar las funciones anteriores, con un microcontrolador no hace falta porque lo lleva todo incorporado además en caso de tener que ampliar el sistema ya ofrece recursos que facilitan esto.
24
Un microcontrolador es en resumen, un procesador completo, aunque de limitadas prestaciones, está contenido en un circuito integrado y se destina a gobernar una sola tarea a la vez.
Los microcontroladores incluyen típicamente:
CPU
RAM
EPROM/EEPROM/PROM/ROM
I/O (input/output) - serie y paralelo
Temporizadores/Contadores
Capturadores
Sistema de interrupciones.
Los modelos más potentes incluyen además sistemas auxiliares (convertidores A/D, D/A, DSP.)
Un sistema de procesamiento basado en un microcontrolador, funcionalmente es un poco diferente a un sistema basado en microprocesador. El sistema basado en un microcontrolador se utiliza de forma más eficiente en un sistema que ejecuta un programa fijo repetitivamente sin la necesidad de ser reprogramado.
2.2 Descripción de los Microcontroladores
Controlador y microcontrolador
Recibe el nombre de controlador el dispositivo que se emplea para el gobierno de uno o varios procesos. Por ejemplo, el controlador que regula el funcionamiento de un horno dispone de un sensor que mide constantemente su temperatura interna y, cuando traspasa los límites prefijados, genera las señales adecuadas que accionan los efectores que intentan llevar el valor de la temperatura dentro del rango estipulado.
Aunque el concepto de controlador ha permanecido invariable a través del tiempo, su implementación física ha variado frecuentemente. Hace tres décadas, los controladores se construían exclusivamente con componentes de lógica discreta, posteriormente se emplearon los microprocesadores, que se rodeaban con circuitos de memoria y E/S sobre una tarjeta de circuito impreso. En la actualidad, todos los elementos del controlador se han podido incluir en un circuito, el cual recibe el nombre de microcontrolador. Realmente consiste en un sencillo pero completo procesador contenido en el corazón de un circuito integrado.
25
Los productos que para su regulación incorporan un microcontrolador disponen de las siguientes ventajas: Aumento de prestaciones: un mayor control sobre un determinado elemento representa una mejora considerable en el mismo.
Aumento de la fiabilidad: al reemplazar el microcontrolador por un elevado número de elementos disminuye el riesgo de averías y se precisan menos ajustes.
Reducción del tamaño en el producto acabado: La integración del microcontrolador en un circuito único disminuye el volumen, la mano de obra y los stocks.
Mayor flexibilidad: las características de control están programadas por lo que su modificación sólo necesita cambios en el programa de instrucciones.
2.2.1 El mercado de los microcontroladores
Aunque en el mercado de la microinformática la mayor atención la acaparan los desarrollos de los microprocesadores, lo cierto es que se venden cientos de microcontroladores por cada uno de aquéllos.
Existe una gran diversidad de microcontroladores. Quizá la clasificación más importante sea entre microcontroladores de 4, 8, 16 ó 32 bits. Aunque las prestaciones de los microcontroladores de 16 y 32 bits son superiores a los de 4 y 8 bits, la realidad es que los microcontroladores de 8 bits dominan el mercado y los de 4 bits se resisten a desaparecer. La razón de esta tendencia es que los microcontroladores de 4 y 8 bits son apropiados para la gran mayoría de las aplicaciones, lo que hace absurdo emplear micros más potentes y consecuentemente más caros. Uno de los sectores que más solicita del mercado del microcontrolador es el sector automovilístico. De hecho, algunas de las familias de microcontroladores actuales se desarrollaron pensando en este sector, siendo modificadas posteriormente para adaptarse a sistemas más genéricos. El mercado del automóvil es además uno de los más exigentes: los componentes electrónicos deben operar bajo condiciones extremas de vibraciones, choques, ruido, etc. y seguir siendo fiables. El fallo de cualquier componente en un automóvil puede ser el origen de un accidente.
En cuanto a las técnicas de fabricación, cabe decir que prácticamente la totalidad de los microcontroladores actuales se fabrican con tecnología CMOS 4 (Complementary Metal Oxide Semiconductor). Esta tecnología supera a las técnicas anteriores por su bajo consumo y alta inmunidad al ruido.
La distribución de las ventas según su aplicación es la siguiente:
Una tercera parte se absorbe en las aplicaciones relacionadas con las computadoras y sus periféricos.
La cuarta parte se utiliza en las aplicaciones de consumo (electrodomésticos, juegos, TV, vídeo, etc.)
El 16% de las ventas mundiales se destinó al área de las comunicaciones.
26
El resto de los microcontroladores vendidos en el mundo, aproximadamente un 10% fueron adquiridos por las industrias de automoción.
También los modernos microcontroladores de 32 bits van afianzando sus posiciones en el mercado, siendo las áreas de más interés el procesamiento de imágenes, las comunicaciones, las aplicaciones militares, los procesos industriales y el control de los dispositivos de almacenamiento masivo de datos.
2.2.2 ¿Qué microcontrolador emplear?
A la hora de seleccionar el microcontrolador a emplear en un diseño concreto hay que tener en cuenta multitud de factores, como la documentación y herramientas de desarrollo disponibles y su precio, la cantidad de fabricantes que lo producen y por supuesto las características del microcontrolador (tipo de memoria de programa, número de temporizadores, interrupciones, etc.):
Costos. Los fabricantes de microcontroladores compiten duramente para vender sus productos. Y no les va
demasiado mal ya que sin hacer demasiado ruido venden 10 veces más microcontroladores que microprocesadores.
Aplicación: antes de seleccionar un microcontrolador es imprescindible analizar los requisitos de la aplicación:
Procesamiento de datos: puede ser necesario que el microcontrolador realice cálculos críticos en un tiempo limitado. En ese caso debemos asegurarnos de seleccionar un dispositivo suficientemente rápido para ello. Por otro lado, habrá que tener en cuenta la precisión de los datos a manejar, si no es suficiente con un microcontrolador de 8 bits, puede ser necesario acudir a microcontroladores de 16 ó 32 bits, o incluso a hardware de coma flotante. Una alternativa más barata y quizá suficiente es usar librerías para manejar los datos de alta precisión.
Entrada Salida: para determinar las necesidades de Entrada/Salida del sistema es conveniente dibujar un diagrama de bloques del mismo, de tal forma que sea sencillo identificar la cantidad y tipo de señales a controlar. Una vez realizado este análisis puede ser necesario añadir periféricos hardware externos o cambiar a otro microcontrolador más adecuado a ese sistema.
27
Memoria: para detectar las necesidades de memoria de nuestra aplicación debemos separarla enmemoria volátil (RAM), memoria no volátil (ROM, EPROM, etc.) y memoria no volátil modificable (EEPROM). Este último tipo de memoria puede ser útil para incluir información específica de la aplicación como un número de serie o parámetros de calibración.
El tipo de memoria a emplear vendrá determinado por el volumen de ventas previsto del producto: de menor a mayor volumen será conveniente emplear EPROM, OTP y ROM. En cuanto a la cantidad de memoria necesaria puede ser imprescindible realizar una versión preliminar, aunque sea en pseudo-código, de la aplicación y a partir de ella hacer una estimación de cuánta memoria volátil y no volátil es necesaria y si es conveniente disponer de memoria no volátil modificable.
Ancho de palabra: el criterio de diseño debe ser seleccionar el microcontrolador de menor ancho de palabra que satisfaga los requerimientos de la aplicación. Usar un microcontrolador de 4 bits supondrá una reducción en los costos importante, mientras que uno de 8 bits puede ser el más adecuado si el ancho de los datos es de un byte. Los microcontroladores de 16 y 32 bits, debido a su elevado costo, deben reservarse para aplicaciones que requieran sus altas prestaciones (Entrada/Salida potente o espacio de direccionamiento muy elevado).
Diseño de la placa: la selección de un microcontrolador concreto condicionará el diseño de la placa de circuitos. Debe tenerse en cuenta que quizá usar un microcontrolador barato encarezca el resto de componentes del diseño.
Los microcontroladores más populares se encuentran, sin duda, entre las mejores elecciones:
8048 (Intel). Es el padre de los microcontroladores actuales, el primero de todos. Su precio, disponibilidad y herramientas de desarrollo hacen que todavía sea muy popular.
8051 (Intel y otros). Es sin duda el microcontrolador más popular. Fácil de programar, pero potente. Está bien documentado y posee cientos de variantes e incontables herramientas de desarrollo.
80186, 80188 y 80386 EX (Intel). Versiones en microcontrolador de los populares microprocesadores 8086 y 8088. Su principal ventaja es que permiten aprovechar las herramientas de desarrollo para Computadora Personal.
68HC11 (Motorola-Freescale y Toshiba). Es un microcontrolador de 8 bits potente y popular con
gran cantidad de variantes.
28
PIC (MicroChip). Familia de microcontroladores que gana popularidad día a día. Fueron los primeros microcontroladores RISC.
Es preciso resaltar en este punto que existen innumerables familias de microcontroladores, cada una de las cuales posee un gran número de variantes.
2.2.2.1 Arquitectura básica en los microcontroladores.
Aunque inicialmente todos los microcontroladores adoptaron la arquitectura clásica de Von Neumann, en el momento presente se impone la arquitectura Harvard. La arquitectura de Von Neumann se caracteriza por disponer de una sola memoria principal donde se almacenan datos e instrucciones de forma indistinta. A dicha memoria se accede a través de un sistema de buses único (direcciones, datos y control).
La arquitectura Harvard dispone de dos memorias independientes una, que contiene sólo instrucciones y otra, sólo datos. Ambas disponen de sus respectivos sistemas de buses de acceso y es posible realizar operaciones de acceso (lectura o escritura) simultáneamente en ambas memorias. Figura 13
Figura 13 — Arquitectura básica de los Microcontroladores, a) Von Neumann b) Harvard.
29
2.2.3 Herramientas para el desarrollo de aplicaciones
Uno de los factores que más importancia tiene a la hora de seleccionar un microcontrolador entre todos los demás es el soporte tanto software como hardware de que dispone. Un buen conjunto de herramientas de desarrollo puede ser decisivo en la elección, ya que pueden suponer una ayuda inestimable en el desarrollo del proyecto.
Las principales herramientas de ayuda al desarrollo de sistemas basados en microcontroladores son:
Desarrollo del software:
Ensamblador. La programación en lenguaje ensamblador puede resultar un tanto ardua para el principiante, pero permite desarrollar programas muy eficientes, ya que otorga al programador el dominio absoluto del sistema. Los fabricantes suelen proporcionar el programa ensamblador de forma gratuita y en cualquier caso siempre se puede encontrar una versión gratuita para los microcontroladores más populares.
Compilador. La programación en un lenguaje de alto nivel (como el C ó el Basic) permite disminuir el tiempo de desarrollo de un producto. No obstante, si no se programa con cuidado, el código resultante puede ser mucho más ineficiente que el programado en ensamblador. Las versiones más potentes suelen ser muy caras, aunque para los microcontroladores más populares pueden encontrarse versiones demo limitadas e incluso compiladores gratuitos.
Depuración. Debido a que los microcontroladores van a controlar dispositivos físicos, los desarrolladores necesitan herramientas que les permitan comprobar el buen funcionamiento del microcontrolador cuando es conectado al resto de circuitos.
Simulador. Son capaces de ejecutar en una Computadora Personal programas realizados para el microcontrolador. Los simuladores permiten tener un control absoluto sobre la ejecución de un programa, siendo ideales para la depuración de los mismos. Su gran inconveniente es que es difícil simular la entrada y salida de datos del microcontrolador. Tampoco cuentan con los posibles ruidos en las entradas, pero, al menos, permiten el paso físico de la implementación de un modo más seguro y menos costoso, puesto que ahorraremos en grabaciones de circuitos para la prueba in-situ.
30
Emuladores en circuito. Se trata de un instrumento que se coloca entre la Computadora Personal anfitrión y el zócalo de la tarjeta de circuito impreso donde se alojará el microcontrolador definitivo. El programa es ejecutado desde la Computadora Personal, pero para la tarjeta de aplicación es como si lo hiciese el mismo microcontrolador que luego irá en el zócalo. Presenta en pantalla toda la información tal y como luego sucederá cuando se coloque la cápsula.
2.3 Elección y justificación del uso del Microcontrolador MC68HC11 de Motorola-Freescale.
La elección de un Microcontrolador para una aplicación determinada se dificulta por la existencia de una enorme variedad de opciones, donde se mezclan características reales de los dispositivos, preferencia por una marca, y otros elementos de difícil consideración como existencia en el mercado, obtención de muestras, seriedad del proveedor, apoyo técnico (humano y bibliográfico) y disponibilidad o costo de herramientas de desarrollo.
En este apartado revisaremos algunas opciones a seleccionar que se pueden encontrar en el mercado para el diseño de aplicaciones como la que perseguimos. Presentamos un enfoque general sobre algunos tipos de microcontroladores disponibles en el mercado según distintos parámetros de selección y para distintos tipos de aplicaciones.
2.3.1 Parámetros para una decisión
En las aplicaciones típicas de menor complejidad, las tareas de los microcontroladores suelen ser simples, con tareas prefijadas y limitadas variables de configuración. En tareas de mayor jerarquía la idea de distribuir inteligencia e interconectarla en red también ha dado importancia a los microcontroladores, por la simplificación de cableado, economía en repuestos y facilidad de reparación. Solo cuando se requiere que la programación sea variable o resolver tareas computacionales complejas, lo natural es usar microprocesadores o subsistemas de computo más elaborados.
Dentro de este contexto de aplicaciones, a la hora de optar por algún microcontrolador deben tenerse en cuenta distintos aspectos, donde el costo del circuito puede llegar a ser intrascendente. Entre los aspectos a considerar están: