INSTITUTO POLITECNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica
Unidad Profesional “Adolfo López Mateos”
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
SENSOR DE VIBRACIONES CON FIBRA
ÓPTICA
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENERÍA ELECTRÓNICA ESPECIALIDAD INSTRUMENTACIÓN
P R E S E N T A:
ING. DANNY HERNÁNDEZ GUTIÉRREZ
DIRECTOR:
DR. WALTER HUMBERTO FONSECA ARAUJO
Resumen
En el presente trabajo se propone un nuevo tipo de sensor de vibraciones del tipo acelerómetro, orientado a la medición de vibraciones en estructuras civiles como puentes y edificios. En este se relacionan los cambios de la longitud de onda de Bragg (λB) de una fibra óptica de rejilla de Bragg (FBG) con los niveles de aceleración de las vibraciones. El principio de funcionamiento del sensor está basado en un sistema de tipo masa-resorte en donde las vibraciones de la masa son transmitidos a la rejilla de Bragg en forma de niveles de tensión a través de una palanca; esto cambia el período de la rejilla inscrita en la fibra óptica provocando el corrimiento de la longitud de onda de maxima reflexión (longitud de onda de Bragg). La respuesta a la salida del sensor es prácticamente lineal, teniéndose cambios en la longitud de onda de reflexión ∆λB de
1pm por cada Gal (1cm/seg2) de aceleración de la vibración. El intervalo dinámico del sensor es de ±1.5g de aceleración, operando en el intervalo de baja frecuencia (f≤5.2Hz).
Abstract
In this work a new kind of vibrations sensor is proposed. This sensor is oriented to measure vibrations in civil structures (like bridges and buildings) by relating levels of acceleration with the changes in wavelength of peak reflected in a fiber Bragg Grating (FBG). The basis is a system of the mass-string type where the movements of the mass are transmitted to the Bragg grating, by means of a lever. This, changes the grating period, shifting the wavelength of the Bragg grating. The response in this case is practically linear having changes in the wavelength of reflection ∆λB of 1pm for each Gal (1cm/sec2) in the input. The operating range of the sensor is ±1.5g in the low frequency range (f≤5.2Hz).
Índice
Pág.
Resumen i
Abstract ii
Objetivo v
Justificación v
Índice de Figuras y Tablas vi
Nomenclatura viii
Introducción 1
Capítulo I Medición de Vibraciones
I.1 Introducción 3
I.2 Importancia del Análisis de Vibraciones 3
I.3 Vibraciones 7
I.4 Sensores de Vibraciones 8
Referencias 19
Capítulo II Medición de Vibraciones de Fibra Óptica
II.1 Introducción 21
II.2 Conceptos Básicos y Sensores de Fibra Óptica
Basados en Intensidad 22
II.3 Sensores de Fibra Óptica Modulados en Fase 31
Referencias 38
Capítulo III Fibra de Rejilla de Bragg (FBG)
III.1 Introducción 39
III.3 Aplicaciones de las Fibras de Rejilla de Bragg 54
Referencias 56
Capítulo IV Sensor de Vibraciones con FBG
IV.1 Introducción 58
IV.2 Principio de Funcionamiento 59
IV.3 Caracterización de FBG, Diseño y Construcción 63
IV.4 Características Dinámicas 73
IV.5 Estimación del Tiempo de Vida del Sensor de
Vibraciones de Fibra de Bragg 77
Referencias 80
Conclusiones 81
Trabajo a Futuro 82
Objetivo
La concepción de un nuevo tipo de sensor de vibraciones de alta sensibilidad usando una fibra óptica de rejilla de Bragg para detectar las vibraciones de baja frecuencia en estructuras civiles (puentes, edificios, etc.) en el que se relacionen los cambios en la longitud de onda de Bragg con los niveles de vibración. Así como el de introducir a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica (SEPI ESIME) con el estudio de las fibras ópticas de rejillas de Bragg uniformes.
Justificación
Índice de Figuras y Tablas
Figuras PÁG
Fig.1.1 El puente Tacoma en el estado de Washington. 5
Fig.1.2 El petrolero Pireridge en el Atlántico 5
Fig.1.3 Respuesta de referencia y diferencias de tolerancia para vibración vertical y horizontal en el cuerpo humano. 6
Fig.1.4 Sistemas en un grado de libertad 8
Fig.1.5 Medición de vibraciones con un sistema de referencia fija. 2
Fig.1.6 Sismómetro. 12
Fig.1.7 Velocímetro 16
Fig.1.8 Acelerómetro 17
Fig.2.1 Sensor de fibra óptica extrínseco. 22
Fig.2.2 Sensor de fibra óptica intrínseco. 23
Fig.2.3 Sensor de fibra óptica de vibraciones proximidad de tipo transmisivo 24
Fig.2.4 Diagrama esquemático de un acelerómetro de tipo obturador en un sistema inercial masa resorte. 25
Fig.2.5 Sensor de tipo reflectivo basado en la apertura numérica y en superficies reflectoras flexibles. 26
Fig.2.6 Una variación del sensor de tipo reflectivo usando lentes GRIN 26
Fig.2.7 Curva de respuesta del sensor de tipo reflectivo usando lentes GRIN 27
Fig.2.8 Sensor de tipo reflectivo transmisivo 29
Fig.2.9 Sensor de fibra óptica basado en microdoblamientos 32
Fig.2.10 Sistema interferométrico de medición de vibraciones de tipo híbrido Mach-Zehnder. 32
Fig.2.11 Interferómetro de Fabry-Perot usando detección heterodina. 33
Fig.2.12 Efecto Doppler en una fibra óptica 33
Fig.2.13 Algunas configuraciones del sensor de fibra óptica de Efecto Doppler. 34
Fig.2.14 Configuración del velocímetro Láser-Doppler. 34
Fig.2.15 Acelerómetro interferométrico de fibra óptica de disco flexible 35
Fig.3.2 Principio de grabado de una fibra de rejilla de Bragg
mediante un patrón de interferencia de haces de luz UV. 41
Fig.3.3 Respuesta espectral de reflexión contra longitud de onda normalizada para una rejilla de Bragg uniforme. 46
Fig.3.4 Respuesta espectral de reflexión de la FBG uniforme. 49
Fig.3.5 Gráfica de Weibull para fibras prístinas, irradiadas con ondas pulsadas y continuas. 52
Fig.3.6 Comportamiento espectral de reflexión contra diferentes estiramientos .aplicados. 55
Fig.4.1 Principio de funcionamiento del sensor de vibraciones con fibra óptica de Rejilla de Bragg. 59 Fig.4.2 Espectro de LED centrado alrededor de 1300nm. 64
Fig.4.3 Espectro de transmisión de FBG otorgado por el analizador de espectro Óptico marca Advantest modelo Q8384 64 Fig.4.4 Configuración para caracterización de fotoelasticidad para FBG 65
Fig.4.5 Fotoelasticidad de FBG 66
Fig.4.6 Estiramiento de FBG 67
Fig.4.7 Muelle de lámina de latón. 70
Fig.4.8 Dimensiones de sensor armado sin FBG adherida. 72
Fig.4.9 Respuesta en frecuencia de acelerómetro. 75
Fig.4.10 Respuesta espectral acelerómetro de FBG para 3Hz a la entrada. 75
Fig.4.11 Error relativo contra frecuencia de vibración. 76
Fig.4.12 Comparación de la repuesta y aceleración real. 77
Fig.4.13 Estimaciones del tiempo de vida para diferentes niveles de tensión promedio. 79
Fig.I Sistemas de interrogación 82
Tablas Tabla 3.1 Comparación de la degradación mecánica para diferentes parámetros de irradiación en el grabado de una rejilla. 53
Tabla 4.1 Características de la FBG 68
Tabla 4.2 Parámetros de sensor 71 Tabla 4.3 Parámetros de la fibra óptica de rejilla de Bragg para
Nomenclatura
m Magnitud de masa [Kg]. t Variable temporal independiente.
x(t) Variable espacial en función del tiempo t.
θ(t) Variable angular en función del tiempo t. g Aceleración gravitacional terrestre = 9.8m/seg2. c Valor de amortiguamiento lineal [N/m/s]. k Constante de elongación [N/m].
Y Amplitud del movimiento vibratorio [m].
ω Frecuencia radial del movimiento vibratorio [rad/seg].
Z Amplitud del movimiento relativo de la masa en un sensor de tipo
masa resorte [m].
z(t) Movimiento relativo de la masa en un sensor de tipo masa resorte como función del tiempo t [m].
y(t) Movimiento vibratorio como función del tiempo t.
φ Defasamiento entre el movimiento relativo de la masa en un sensor de tipo masa-resorte y el movimiento vibratorio.
ωn Frecuencia natural radial de oscilación de un sistema masa-resorte [rad/seg].
fn Freceuncia natural de oscilación de un sistema masa-resorte [Hz]. Cc Amortiguamiento crítico de un sistema masa-resorte [N/m/s].
ζ Fracción de amortiguamiento crítico [N/m/s]
ÿ(t) Aceleración del movimiento vibratorio en función del tiempo. Ag Pico de aceleración del movimiento vibratorio.
E Campo eléctrico [j/C]. Q Carga eléctrica [C].
C Capacitancia eléctrica [Fd]. pC Unidad de catga eléctrica = 1x10-12C. mV Unidad de voltaje = 1x10-3V.
pF Unidad de capacidad eléctrica = 1x10-12Fd. FO Abreviatura de Fibra Óptica.
fm Frecuencia de modulación [Hz].
fD Corrimiento de frecuencia debido al efecto Doppler [Hz]. MAO Modulador acusto óptico.
FBG Fibra óptica de rejilla de Bragg. B Longitud de onda de Bragg. neff Índice de refracción efectivo. Λ Período de una rejilla de Bragg.
neff Perturbación en el índice de refracción.
s Visibilidad delas franjas inscritas en una fibra óptica. z Variable espacial a lo largo del eje longitudinal de la FO. φ(z) Variación del período de la rejilla como función de z.
Am(z) Amplitud de una onda guiada transmitida como función de z en el
m-ésimo modo.
Bm(z) Amplitud de una onda guiada reflejada como función de z en el
m-ésimo modo.
β Constante de propagación de una onda guiada. Longitud de unda de una onda luminosa guiada. CTqm Constante de acoplamiento transversal.
CLqm Constante de acoplamiento longitudinal. ∆ Perturbación en la permitividad.
n Cambio de índice de refracción.
ζqm(z) Coeficiente de acoplamiento promedio en función de z.
qm(z) Nivel de variación del coeficiente de acoplamiento en función de z.
ρ Coeficiente de amplitud.
R Potencia óptica reflejada de una FBG [normalizado]. N Número de períodos en una FBG
Τ Retardo de la luz reflejada de una FBG. D Dispersión de la luz reflejada en una FBG. ∆ B Corrimiento de la longitud de onda de una FBG. pe Constante fotoelástica de una FBG.
ε Estiramiento pico aplicado a una rejilla de Bragg en sensor de vibraciones con FBG [µstrains].
Introducción
El presente trabajo corresponde al área de Sensores de Fibras Ópticas de la Maestría en Ciencias en Ingeniería Electrónica de la SEPI ESIME campus Zacatenco.
Se comienza con una revisión a la teoría de las vibraciones y a la importancia de su análisis en la vida del hombre (Capítulo I). Además, se revisan varias formas básicas para su medición, haciendo énfasis en los sistemas de medición de tipo masa resorte (sismómetro, velocímetro y acelerómetro), y se obtienen sus ecuaciones y características de operación y de frecuencia, ya que de esta clase de sensores se derivará el sensor propuesto; llegando así, a la conclusión de que son los sensores de tipo acelerómetro quienes mejor se adaptan a las estructuras civiles
Posteriormente, se realiza un análisis del estado del arte de algunos sensores de vibraciones basados en fibra óptica, mencionando sus principios de operación y características. Esto con el fin de ubicar y de comparar de mejor manera al sensor propuesto (Capítulo II).
Previo al planteamiento del principio de funcionamiento y diseño del sensor, se realiza un estudio de introducción a las fibras ópticas de rejilla de Bragg (Capítulo III). Se repasa el modelado de la rejilla por medio de la Teoría de Modos acoplados en donde se considera a la fibra de rejilla de Bragg como una guía de onda, considerando a la propia rejilla como una serie de perturbaciones en el medio causantes de acoplamientos entre la onda transmitida y reflejada. También se analiza su sensibilidad a los estiramientos y las bases para la predicción de su tiempo de vida cuando está sujeta a diversos niveles de tensión.
Capitulo I Medición de Vibraciones
I.1 Introducción
En el presente capítulo se analizarán algunos de los sensores empleados más comúnmente en la medición de vibraciones. Los principios de funcionamiento de los sensores explicados aquí, tienen una amplia variedad de aplicaciones, que van desde la medición de vibraciones en estructuras civiles o máquinas rotatorias (vibraciones de baja frecuencia), a aquellas presentadas en misiles o aviones (vibraciones de alta frecuencia), o aquellas vibraciones debidas a impactos de choques.
El objetivo es dar una breve introducción a la teoría de las vibraciones así como el de enfatizar el papel que juegan las mediciones de vibraciones en el análisis y el modelado de diversos sistemas vibratorios en diferentes campos de la ingeniería y mostrar las variantes de los sensores de vibraciones, justificando así, la elección del sensor de tipo acelerómetro desarrollado en la presente tesis.
I.2 Importancia del Análisis de Vibraciones
Actualmente se gastan grandes sumas de dinero en el estudio y análisis de vibraciones. A veces el objetivo es su control (algo que es fundamentalmente deseable); y más a menudo el objetivo es encontrar la razón del porque las oscilaciones se presentan y si es posible detenerlas.
Limitándonos a lo que concierne a vibraciones mecánicas, vemos que el tema sigue siendo demasiado amplio, así pues, refirámonos al tema imponiendo algunas otras restricciones como el de evitar la mención en lo referente al sonido, ruido, etc.
[image:16.595.155.476.337.563.2]Así, para comprender la importancia del análisis o estudio (y por tanto de la medición) de las vibraciones en la vida del hombre, podemos decir que existen en la historia de la ingeniería algunos ejemplos que son más que suficientes para hacerlo. En Fig. 1.1a, se muestra una fotografía tomada durante una de las oscilaciones más famosas, la del Gran Puente Tacoma en el estado de Washington. Esta gran oscilación fue causada por un gran viento constante el día 7 de noviembre de 1940 aproximadamente a las 11:00 AM. que concluyó con el desplome de esta fina estructura ingenieril a sólo unos meses de su terminación como lo muestra la figura 1.1b.
b) Desplome definitivo del puente Tacoma.
Fig. 1.1. El puente Tacoma sobre los rápidos en el estado de Washington. A poco tiempo de
haber sido abierto, el puente se desplomó debido a un fuerte viento en noviembre de 1940.
Pocas vibraciones han sido tan espectaculares como la del gran puente Tacoma, pero existen otros ejemplos ilustrativos como el mostrado en Fig. 1.2. La figura muestra al barco petrolero Pine Ridge partido en dos debido a una fuerte tormenta en el atlántico en diciembre de 1960. Las olas que encaró durante su vida útil y sobre todo aquellas de la fatal tormenta, indujeron sobreesfuerzos en el casco, al final el acero cedió y el barco se partió en dos. Aquí, al menos, uno podría pensar que todas las cuestiones están claramente entendidas y que es improbable que un barco se pierda de esta forma.
[image:17.595.234.398.533.705.2]En relación a las vibraciones que el cuerpo humano puede soportar, en Fig. 1.3 se muestra una gráfica que muestra la tolerancia y un comportamiento de referencia del cuerpo humano expuesto durante 8 hrs. a la vibración vertical y horizontal en un ambiente laboral.
[image:18.595.212.415.300.471.2]En esta gráfica se observa que existen diferencias en las sensaciones del cuerpo humano a vibraciones verticales y horizontales [1]. El cuerpo es más sensible a las vibraciones verticales comprendidas entre 4 y 8 Hz y a las horizontales comprendidas entre 1 y 2 Hz, lo que se usa como referencia para el diseño de sistemas de transporte, entre otros.
Fig. 1.3. Respuesta de referencia y diferencias de tolerancia para vibración vertical y horizontal
en el cuerpo humano.
El tema de la medición y análisis de las vibraciones encuentra una gran diversidad de aplicaciones que van desde las investigaciones hechas en la NASA acerca del efecto de las vibraciones de las naves espaciales en los cromosomas de los tripulantes [2], hasta los efectos en edificios de las vibraciones causadas por el tráfico de automotores [3]; otras investigaciones se orientan al efecto que vibraciones producen en el ambiente, en instrumentos, plantas y organismos [4], en el ADN [5], en cargas dinámicas, etc.
I.3 Vibraciones
Vibración es un término que describe la oscilación en un sistema mecánico y está definida en términos de frecuencia (o frecuencias) y amplitud. Conceptualmente, el registro de vibración vs. tiempo, puede ser considerado como sinusoidal o de forma harmónica simple. La vibración encontrada en la práctica a menudo no tiene este comportamiento, pero se puede considerar como una combinación de varias componentes senoidales, cada una teniendo frecuencia y amplitud distintas. Si cada componente frecuencial es un múltiplo entero de la frecuencia más baja, la forma de la vibración se repite después de ciertos intervalos de tiempo y se le llama periódica. Si la relación existente no es entera, no existirá periodicidad, y la vibración será conocida como compleja.
La vibración de una estructura a menudo es pensada en términos de modelos consistentes de una masa y un resorte. La vibración de tales modelos, o sistemas, se puede llamar “libre” o “forzado”.
Todos los sistemas en ingeniería que poseen masa y elasticidad son capaces de vibrar con ciertos grados de libertad y dirección. Si un sistema es restringido a vibrar de una sola manera y dirección, o si solamente una coordenada independiente se necesita para especificar completamente la localidad de las masas del sistema en el espacio, se trata de un sistema con un grado de libertad [7]. Para ilustrar lo anterior, en Fig. 1.4, se muestran 2 sistemas con un grado de libertad.
Fig. 1.4.. Sistemas con un grado de libertad
En el sistema masa-resorte mostrado en Fig. 1.4A, si la masa m es restringida a moverse de manera vertical solamente, sólo una coordenada, x(t), es requerida para definir la posición de la masa en cualquier momento. Así, se dice que el sistema posee un grado de libertad. Similarmente, si el péndulo de torsión mostrado en fig. 1.4B es restringido a vibrar sobre el eje longitudinal de la barra, la configuración del sistema puede ser especificada con una coordenada, θ(t). Siendo también un sistema con un grado de libertad.
I.4 Sensores de Vibraciones
Un sensor de vibraciones es un dispositivo que convierte movimiento vibratorio a una señal ya sea óptica, mecánica o más comúnmente eléctrica, que es proporcional a algún parámetro del movimiento, como aceleración.
El instrumento de medición o sistema convierte el movimiento vibratorio a una forma observable que es directamente proporcional al parámetro del movimiento. Puede consistir de un sensor con su respectivo transductor, etapa de acondicionamiento de señal y un dispositivo para desplegar la señal. Un instrumento contiene a todos estos elementos, mientras que un sistema utiliza varios instrumentos.
Un acelerómetro es un sensor cuya salida es proporcional a la aceleración de entrada.
Un velocímetro es un sensor cuya salida es proporcional a la velocidad de entrada.
Un sensor de desplazamiento es un sensor cuya salida es proporcional al desplazamiento de entrada.
Generalmente los sensores de vibraciones se refieren a aquellas vibraciones con un grado de libertad, es decir, a sólo una parte del fenómeno vibratorio (en caso de que el sistema se encuentre vibrando en más de un grado de libertad). Ya que uno de los principales objetivos de los sensores es el de ser una herramienta para analizar un sistema vibratorio e incluso obtener un modelo de su comportamiento, generalmente se requiere de varios sensores ubicados en diferentes zonas con diferentes formas y direcciones de vibración para dar una información más detallada del sistema.
Además, la medición de vibraciones se realiza para determinar los movimientos presentes ya sea en ambientes rigurosos como en condiciones muy quietas o que presentan niveles vibratorios muy bajos [9]. Así, ciertos sensores deben funcionar correctamente cuando son expuestos a explosiones, fuerzas de disturbio oscilatorias y ambientes acústicos rigurosos, y otros deben tener la suficiente sensibilidad en las mediciones que se realizan en otro tipo de entornos.
de rendimiento u otros comportamientos no-lineales, debido a que el incremento en la disipación de energía asociado a tales fenómenos puede ser importante en los límites de respuesta a sismos y excitaciones repentinas. Así pues, se requiere de mediciones exactas, realizadas simultáneamente en varios puntos de la estructura y que estas sean registradas en el tiempo.
Para tales aplicaciones, los sensores deben ser adecuados para la medición de movimientos con aceleraciones de aproximadamente 0.001g a 10,000g [9] y a veces más allá de estos límites. No es práctico diseñar un solo sensor que sea adecuado para la aplicación de mediciones en todo este intervalo de aceleración.
La respuesta en frecuencia del sensor es otro requerimiento importante. Impactos de larga duración requieren que la respuesta sea plana a frecuencias a veces por debajo de 1 Hz [9]. Así mismo, para impactos de duración muy corta (en la región de microsegundos requieren que la respuesta en frecuencia sea plana hasta los 10 Khz. El transductor en el sistema mide el movimiento vibratorio producido; sin embargo no debe presentar una salida apreciable para niveles de presión producidos por altos niveles acústicos. La característica anterior se conoce como la respuesta acústica.
Otro factor importante es la temperatura, encontrándose sus requerimientos máximos y/o mínimos en vehículos espaciales, aviones, etc. Se han desarrollado sensores para operar satisfactoriamente en un intervalo de temperatura de -200 ºC a 400ºC aprox. [9].
I.4.1 Clasificación de los Sensores de Vibraciones
En principio, las vibraciones son medidas con referencia a un punto fijo en el espacio1. Esto puede ser realizado por cualquiera de los 2 tipos fundamentales de sensores [8]:
1. Sensores con referencia fija, una terminal del sensor se fija a un punto fijo en el espacio y la otra terminal se fija (ópticamente, mecánicamente o electrónicamente por ejemplo) al punto cuya vibración será medida.
2. Sensor de tipo Masa-Resorte (instrumento sísmico), la única terminal es la base del sistema masa-resorte, esta base se fija en el punto donde las vibraciones serán medidas. La vibración en ese punto es transmitida a la masa, produciéndose un movimiento que se determina en relación a la base del sistema.
Sensores con Referencia Fija
La Fig. 1.5 ilustra esquemáticamente el principio de funcionamiento de un sensor con referencia fija, para medir el movimiento de la parte vibrante con relación a la referencia fija. Agregando una escala a la referencia fija y un puntero a la parte vibrante, como se muestra en Fig. 1.5A, los límites de movimiento de la parte vibrante pueden ser determinados visualmente. Si el puntero inscribe una marca sobre la escala, el desplazamiento pico-pico puede ser determinado midiendo la longitud de la línea. Información adicional puede obtenerse sustituyendo un tambor rotatorio por la escala, como se ilustra en Fig. 1.5B. Entonces las curvas inscritas pueden representar un registro versus tiempo del desplazamiento de la parte vibrante con respecto en relación a la referencia fija.
1
Fig. 1.5. Medición de vibraciones con un sistema de referencia fija: (A) El desplazamiento de la parte
vibrante se indica por observación directa. (B) Los desplazamientos son registrados en un tambor
rotatorio, describiendo la forma de onda en función del tiempo.
También se pueden emplear medios eléctricos para indicar el movimiento de la parte vibrante en relación con la referencia fija, así como algunos medios ópticos son usados cuando el observador ocupa la posición de la escala o tambor en Fig. 1.5 provisto de algunos medios para determinar el desplazamiento de la parte vibrante.
Sensores de tipo Masa-Resorte (Transductor Sísmico)
En muchas aplicaciones, es imposible el establecer una referencia fija para la medición de vibraciones. El elemento básico de muchos instrumentos medidores de vibraciones, es la unidad sísmica de la Fig. 1.6. La única terminal de este sensor es la base del sistema masa resorte que se coloca sobre la estructura vibrante. Dependiendo del intervalo de frecuencia utilizado, el desplazamiento, la velocidad o la aceleración se indican por el movimiento relativo de la masa suspendida, con respecto a la base de la caja.
[image:24.595.169.425.585.732.2]Para determinar el comportamiento de tales sensores consideremos la ecuación del sistema masa resorte, incluyendo un nivel de amortiguamiento c, dada por:
(
) (
) (
112 2 . ... y x k y x dt d c dt x d
m =− − − −
)
En donde x e y son los desplazamientos de la masa sísmica y del cuerpo vibrante respectivamente, ambos medidos con respecto a una referencia inercial. Llamando z al desplazamiento relativo de la masa m y la carga unida al cuerpo vibrante, dado por:
( ) ( ) ( ) ( )
t x t y t ...1.2z = −
Y suponiendo un movimiento sinusoidal y=Ysenωt del cuerpo vibrante y sustituyendo en (1.1):
( )
132 2 2 . ... t Ysen m kz dt dz c dt z d
m + + = ω ω
La amplitud Z y el defasamientoφ están entonces dados por:
( )
142 2 2 2 . ... m c m k Y Z ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − = ω ω ω
( )
152
1 ... .
m k m c tg y ω ω φ − = −
La frecuencia natural sin amortiguamiento ωn del sensor es la frecuencia en la
que:
( )
1.6... Y
Esta frecuencia se tiene cuando el amortiguamiento es cero (c=0), o cuando el ángulo de fase φ=90º. De las ecuaciones (1.4) y (1.5), esto ocurre cuando el denominador es cero (si c=0):
( )
17 2 rad/ seg... .m k fn
n = π =
ω
Así, un resorte rígido y/o una masa ligera producen un sensor con alta frecuencia natural. Una masa pesada y/o un resorte dócil producirán un sensor con una baja frecuencia natural.
El amortiguamiento en un sensor se especifica como una fracción del amortiguamiento crítico. El amortiguamiento crítico cc es el mínimo nivel de amortiguamiento que previene un sensor masa-resorte de oscilar cuando se le aplica una función escalón a la entrada. Y se define como:
( )
18 2 km... . cc =Así, la fracción del amortiguamiento crítico ζ es:
( )
1.9 ... km 2c c
c
c
= = ζ
Es conveniente el definir la frecuencia de excitación ω para un sensor en términos de la frecuencia natural sin amortiguamiento ωn usando la razón adimensional
de frecuencias angulares ω/ωn. Sustituyendo entonces esta razón y la relación definida
(
110)
2 1 2 2 2 . ... Y Z n n n ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = ω ω ζ ω ω ω ω(
1 11)
1 2 2 1 . ... tg n n ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = − ω ω ω ω ζ φ
La respuesta del sensor de tipo masa-resorte dada por (1.10) puede ser expresada en términos de la aceleración ÿ(t) de la parte vibratoria sustituyendo el pico de aceleración Ag=Yω2. Entonces el pico de desplazamiento entre la masa y la base del
transductor Z debido al pico de aceleración Ag es:
(
112)
2 1 1 2 2 2
2 ... .
A Z n n g n ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ω ω ζ ω ω ω
Sismómetro. Instrumento de Baja Frecuencia Natural
Cuando la frecuencia natural ωn del instrumento es baja con respecto a la
frecuencia de vibración ω que se va a medir, la razón ω/ωn es un número grande y el
desplazamiento relativo z se aproxima a y, sin importar el valor del amortiguamiento. La masa m permanece entonces estacionaria mientras que la caja portante se mueve con el cuerpo vibrante. Tales instrumentos se denominan sismómetros.
proporcional a la rapidez de corte del campo magnético, la salida del instrumento será proporcional a la velocidad del cuerpo vibrante.
Fig. 1.7. Velocímetro
Tales instrumentos se llaman velocímetros. Un instrumento típico de esta clase puede tener una frecuencia natural de 1 a 5 Hz y, un intervalo útil de frecuencia de 10 a 2,000 Hz. La sensibilidad de tales instrumentos puede estar en el rango de 20 a 350mV por cm/seg con el desplazamiento máximo limitado a cerca de 0.5 cm, pico a pico.
Acelerómetro. Instrumento de alta frecuencia natural.
Cuando la frecuencia natural del instrumento es alta comparada con la frecuencia de la vibración que se va a medir, el instrumento indica aceleración. Un examen de (1.10) muestra que el factor:
2 2 2 1 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − n n ω ω ζ ω ω
Tiende a uno para ω/ωn <<1, de modo que:
(
113)
2 2 2 . ... n aceleració Y Z n n ω ω ω = ≅
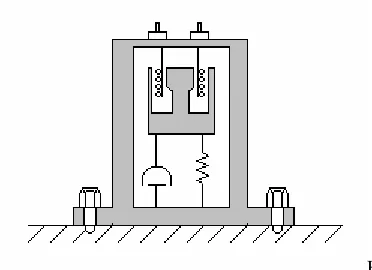
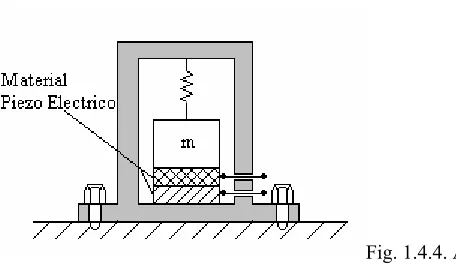
Las propiedades piezoeléctricas de los cristales como cuarzo o tintanato de bario, son utilizadas en acelerómetros para medidas de alta frecuencia [11]. Los cristales están montados de manera que, bajo aceleración, se compriman o flexionen de manera que se genere carga eléctrica. La frecuencia natural de tales acelerómetros puede hacerse muy alta, en el rango de 50kHz, lo que permite medidas de aceleración de hasta 3kHz.
Fig. 1.4.4. Acelerómetro.
La sensibilidad del acelerómetro de cristales esta dada en términos de carga (pC por g), o en términos de voltaje (mV) por g. Como el voltaje está relacionado con la carga por medio de la ecuación E=Q/C, la capacitancia del cristal, incluyendo la capacitancia “shunt” del cable conector debe especificarse. La sensibilidad típica para un acelerómetro de cristales es de 25pC/g con un cristal de capacitancia de 500pF, por lo que entonces tenemos una sensibilidad de 50mV/g.
En el presente trabajo se prefirió el sensor de tipo acelerómetro ya que es el que mejor se adecua a la caracterización de estructuras. Siendo las características pricipales de este las siguientes:
a) Frecuencia natural relativamente alta. Los acelerómetros son inherentemente robustos y fácilmente manejables
b) La instalación en la aplicación se facilita debido a su baja sensibilidad a la inclinación y a que no requiere de exactitud en la orientación. c) Se puede realizar una calibración absoluta de manera rápida girando
el sensor en el sentido de la fuerza gravitacional de la tierra.
desplazamientos pueden ser obtenidos de los acelerómetros a través de métodos de integración de sus resultados, ya que el proceso de diferenciación no puede ser obtenido con exactitud.
La principal desventaja de los acelerómetros es el hecho de que señales ajenas de alta frecuencia que no son significativas en las estructuras, puedan introducir aceleraciones lo suficientemente grandes para falsear los registros obtenidos. Si las pruebas son realizadas en un edificio que contiene maquinaria trabajando, o si la vibración por sí misma genera frecuencias altas considerables, se dificultará la obtención de buenos acelerogramas de las vibraciones de baja frecuencia del edificio. Éstas altas frecuencias pueden ser eliminadas del registro por medio de filtrado, sin embargo, esto podría aumentar la complejidad del sistema, ya que un filtro adecuado podría ser tan complicado como la etapa de amplificación.
Una segunda desventaja de los acelerómetros es su señal de salida relativamente baja, lo que requiere de una amplificación electrónica. Tales sistemas de amplificación están disponibles de manera comercial en muchas formas, pero son inherentemente complicados en naturaleza y presentan dificultades en medios con mucho ruido
Para la mayor parte del trabajo en vibraciones de estructuras, la respuesta del sensor debe ser esencialmente constante desde 0 a 50 Hz, y su intervalo de aceleración a medir de 0.0005g a 1g. Ya que las mediciones de fase son importantes, los corrimientos de fase deben ser conocidos con exactitud sobre su intervalo de frecuencia de operación.
Los medidores de desplazamiento han sido usados en pruebas primarias para la determinación de frecuencias naturales de vibración [15]. Las lecturas reales de desplazamiento a bajas frecuencias pueden requerir un sensor con período natural largo y por tanto con fragilidad inherente, dificultad de ajuste y sensibilidad a la inclinación.
Referencias
[1] R. E. D. Bishop. “Vibration” 2nd Ed. 1979, Cambridge University Press, Cambridge. Pp. 1-8, 20-24.
[2] James C. Knepton, Jr. “The Influence of Vibrations in Chromosomes.” 1965. Office of Biotechnology and Human Research, NASA. Pensacola Florida. Pp. 1.
[3] Osama Hunaidi. “Traffic Vibrations in Buildings” 2000. Institute for Research in Construction. Ottawa, Canada. Pp. 1-3.
[4] Christian Madshus. “Vibration Effects on the Environment” http://www.ngi.no/English/default.asp
[5] Elsner H. I., Lindblad E. B. “Ultrasonic Degradation of DNA.” 1989. GlueTech Ltd, Copenhagen, Denmark. Pp. 1.
[6] Cyril M. Harris. “Shock and Vibration Handbook, Cap. I: Introduction to the Hand Book” 1961. McGraw Hill Book Company, Inc. California Institute of Technology. Pp. 1-(1-3).
[7] William W. Seto. “Theory and Problems of Mechanical Vibrations” 1964. Schaum Publishing Company. Pp. 1-3.
[8] Wilson Bradley, Jr. “Shock and Vibration Handbook, Cap. II: Introduction to Shock and Vibrations Measurements” 1961. McGraw Hill Book Company, Inc. California Institute of Technology. Pp. 12-(1-6).
[10] D. E. Hudson “Dynamic Test of Buildings and Special Structures” 1962. The American Society of Mechanical Engineers. Pasadena, California. Pp. 81-86.
Capitulo II Medición de Vibraciones con Fibra Óptica
II.1 Introducción
En las últimas dos décadas han ocurrido dos grandes revoluciones debido al crecimiento de las industrias de comunicaciones por fibras ópticas y de optoelectrónica.
En paralelo con estos desarrollos la tecnología de los sensores de fibra óptica ha sido un beneficiario de ambas tecnologías. Muchos de los componentes asociados con estas industrias fueron desarrollados a menudo para las aplicaciones de los sensores de fibra óptica, y la tecnología de los sensores de fibra óptica ha sido a menudo dependiente del desarrollo y la subsecuente producción en masa de los componentes que soportan estas industrias. Debido a que los precios de estos componentes han decaído y se han logrado mejoras importantes en su calidad, la posibilidad de que los sensores de fibra óptica desplacen a los sensores tradicionales de rotación, aceleración, de campos eléctricos y magnéticos, temperatura, presión, acústicos, vibración, de posición lineal y angular, estiramiento, humedad, viscosidad, mediciones químicas y de todo un repertorio de otras aplicaciones de sensores ha sido incrementada. En los primeros días de la tecnología de los sensores de fibra óptica, los de mayor éxito comercial eran aquellos que estaban orientados a aplicaciones donde la tecnología de sensores existente era marginal o en muchos casos inexistente. Las ventajas propias de los sensores de fibra óptica, que incluyen el ser sensores ligeros, de tamaño muy reducido, pasivos eléctrica y químicamente, inmunes a interferencia electromagnética, alta sensibilidad, gran ancho de banda y su robustez frente a ambientes rigurosos, fueron neutralizadas debido a sus grandes desventajas en costo y poca familiaridad del usuario.
más sofisticados. Conforme esta situación continúe, las oportunidades de los diseñadores para producir productos competitivos se incrementarán y se podrá esperar que los sensores de fibra óptica asuman un rol más importante en el mercado de los sensores.
En el presente capítulo, serán revisados algunos tipos de sensores de fibra óptica aplicados en la medición de vibraciones con la finalidad de establecer algunos antecedentes al sensor propuesto en el presente trabajo y de ubicarlo dentro del actual estado del arte de acuerdo a sus características físicas y de operación.
II.2 Conceptos Básicos y Sensores de FO Modulados en Intensidad
Los sensores de fibra óptica pueden ser divididos en dos categorías básicas: sensores modulados en intensidad y modulados en fase. Dentro de estas categorías también existen otras 2 subcategorías referidas como: sensores de fibra óptica extrínsecos o híbridos, y sensores de fibra óptica intrínsecos o totalmente de fibra [1]. La figura 2.1 ilustra el caso de un sensor de fibra óptica de tipo extrínseco o híbrido.
Fig. 2.1. Los sensores de fibra óptica extrínsecos consisten de fibras ópticas que conducen la luz entrante
y saliente de una “caja negra” que modula la luz que la atraviesa en respuesta a un fenómeno externo a
medir.
El sensor intrínseco o totalmente de fibra se muestra en Fig. 2.2, este utiliza una fibra óptica para conducir la luz, y mientras esta es conducida, el campo externo a medir la modula.
Fig. 2.2. En los sensores de fibra óptica intrínsecos la luz transmitida a través de la fibra es modulada por
el efecto ambiental ya sea de forma directa o a través de cambios en la longitud del camino óptico en la
misma fibra
Los sensores modulados en intensidad generalmente son asociados con el desplazamiento o alguna otra perturbación física que interactúa con la fibra o el transductor mecánico fijado a la fibra. La perturbación causa variaciones en la intensidad de la luz captada, las cuales son función del fenómeno medido.
Los sensores de fibra óptica modulados en intensidad detectan la cantidad de luz como función del fenómeno medido. La pérdida de intensidad de luz se puede asociar con transmisión, reflexión, micro doblamientos, u otros fenómenos como absorción, dispersión o fluorescencia, polarización y rejillas ópticas, los cuales pueden ser incorporados en la fibra o en un objetivo reflectivo o transmisivo.
II.2.1 Sensor de tipo Transmisivo
segunda fibra (fibra receptora) depende de su ángulo de apertura y de la distancia ‘d’ a la que se encuentre de la fibra transmisora.
(a) (b)
Fig. 2.3. Los sensores de fibra óptica de vibraciones o proximidad se basan en la apertura numérica y
pueden ser usados para medir los niveles de vibración en maquinaria, entre otras aplicaciones.
Esta configuración resulta en un buen sensor análogo [1], la figura 2.3a muestra una configuración para la medición de desplazamientos o vibraciones de manera axial, mostrando su respuesta típica de la forma 1/d. Una configuración más sensitiva es la de desplazamiento radial, como lo muestra Fig. 2.3b. Este sensor no muestra transmisión si las sondas son desplazadas una distancia igual a un diámetro de una fibra. Aproximadamente el primer 20% del desplazamiento otorga una salida lineal.
Un acelerómetro puede implementarse con el principio transmisivo, la figura 2.4, muestra el diagrama esquemático de un acelerómetro de tipo obturador basado en un sistema inercial masa-resorte [2]. El acelerómetro consiste de un obturador óptico fijo a un sistema inercial construido de una masa puesta sobre una hoja flexible. En la ausencia de vibraciones, la mitad de la potencia óptica emitida por la fibra transmisora es obstruida. Cuando el objeto en donde es montado el sensor comienza a vibrar con un desplazamiento y(t), el desplazamiento del obturador z(t) es proporcional a la aceleración radial de la vibración y(t)ω2 en un factor 1/ωn2, siempre y cuando se cumpla
que la frecuencia angular a medir ω sea despreciable en comparación a la frecuencia natural del sistema inercial masa-resorte del sensor ωn. Por tanto la intensidad de luz
modulada en intensidad es acoplada a la fibra receptora y posteriormente a un fotodiodo.
Fig. 2.4. Diagrama esquemático de un acelerómetro de tipo obturador basado en un sistema inercial
masa-resorte.
En este tipo de acelerómetro, el intervalo dinámico de medición es de 0.98m/s2 a 390m/s2, la sensibilidad de detección es reportada plana,[2] a frecuencias superiores a 1kHz.
II.2.2 Sensor de Tipo Reflexivo
Respuesta Sensor FO
0,4 0,5 0,6 0,7 0,8 0,9 1 1,1
0,001 0,003 0,005 0,007 0,009
d (mts)
In
te
n
s
id
ad
a) b)
Fig. 2.5. Los sensores de fibra óptica basados en la apertura numérica y en superficies reflectoras flexibles
pueden ser usados en la medición de pequeñas vibraciones y desplazamientos.
Para la medición de vibraciones, se puede construir la superficie flexible reflectora de forma que su frecuencia natural de vibración sea por lo menos 5 veces la mayor frecuencia de vibración a medir[capítulo I], teniendo variaciones de intensidad luminosa proporcionales a la aceleración de la vibración en un factor 1/ωn2.
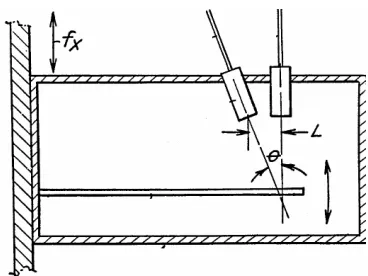
[image:38.595.207.391.582.720.2]Una variación de este tipo, es el sensor mostrado en Fig. 2.6, que consta de una lámina vibrante que está conectada mecánicamente al cuerpo del sensor, que a su vez esta fijado al cuerpo a ser analizado, y un sistema de triangulación óptica para realizar el registro de los desplazamientos de la parte movible de la lámina, este sistema se compone de dos fibras ópticas en cuya terminación se encuentran un par de micro-lentes con gradientes en el índice de refracción (GRIN lens) del tipo cilíndricos; el eje óptico de este par de fibras esta mutuamente inclinado pero converge en la parte movible de la lamina dando una resolución en el orden de micrómetros en el desplazamiento de la hoja.
Fig. 2.6. Una variación del sensor de tipo reflectivo, empleando un par de fibras y lentes con gradiente en
En muchos casos se construye la lámina para que entre en resonancia con la frecuencia de vibración característica del sistema a medir, como se pudiera presentar en máquinas rotatorias o partes de ellas, como motores de potencia, estatores o en transformadores de alto voltaje, ya que generalmente la frecuencia de vibración fundamental no varía y se tendría máxima sensibilidad. En Fig. 2.7 muestra la curva de respuesta de este sensor [3], para los valores de inclinación relativa de los ejes ópticos de las fibras θ = 13º y separación de estas L = 2.5mm [3].
Fig. 2.7. Curva de respuesta del sensor de tipo transmisivo-reflectivo mostrado en Fig. 2.6.
El eje de las abscisas representa la distancia de la laminilla a la terminación de la lente paralela a la laminilla, y el eje de las ordenadas la potencia recibida en la lente receptora, la potencia de excitación es de 630 µW. La línea recta RB, se obtuvo aplicando un ajuste con un intervalo de error de 3mm, centrada a una distancia de 8.15mm, tiene una pendiente de aproximadamente 25 nW/mm. Suponiendo que se posee un sistema de detección con resolución de al menos 1nW, se tendrá una resolución cercana a 40µm. Así, si la ganancia del sistema Go expresada por (2.1) es de
10, es posible obtener una resolución real de medición de 4µm de desplazamiento y un intervalo dinámico de 300µm pico a pico.
( )
21 14 1
1
2 ... .
Go µ
µ µ
≈ −
=
En la medición de vibraciones, se puede construir la superficie flexible reflectora de forma que su frecuencia natural de vibración sea por lo menos 5 veces la mayor frecuencia de vibración a medir, teniendo variaciones de intensidad luminosa proporcionales a la aceleración de la vibración en un factor 1/ωn2.
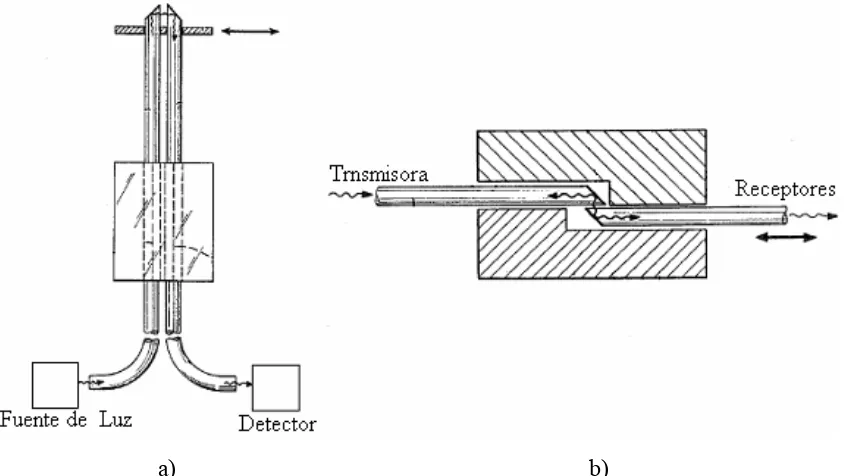
II.2.3 Sensor de Tipo Reflectivo-Transmisivo
La configuración del sensor de tipo transmisivo-reflectivo, se muestra en la Fig. 2.8, el sensor consiste de una fibra transmisora acoplada a una fuente de luz, y de una segunda fibra receptora acoplada a un fotodetector; al menos una de estas dos fibras se mueve relativamente a la otra debido a algún fenómeno mecánico, como vibración por ejemplo.
La terminación de la fibra transmisora es a 45º respectivamente del eje de la fibra y con un recubrimiento reflectivo, la segunda fibra (fibra receptora) se posiciona de forma paralela a la fibra transmisora, su terminación también es reflectora y cortada a un ángulo de 45º, así, las dos superficies reflectoras se ponen una frente a la otra, siendo el movimiento en al menos una de ellas lo que variará la intensidad de luz captada de manera proporcional a las vibraciones.
a) b)
Fig. 2.8. Sensor de tipo Reflectivo-Transmisivo. a) Configuración Típica. b) Configuración más sensible
a los desplazamientos longitudinales.
II.2.4 Sensor por Microdoblamientos
Fig. 2.9. Los sensores de fibra basados en microdoblamientos son configurados de tal manera que un
efecto externo resulte en un incremento o decremento de la perdida de luz debida a pequeños
doblamientos en una sección de la fibra.
Como los sensores de tipo reflectivo, este tipo de sensores son potencialmente exactos y de bajo costo. Es importante notar que en este tipo de sensor, la trayectoria de la luz es cerrada y por lo tanto es inmune a ambientes ópticos ruidosos.
La curva de respuesta muestra el comportamiento no-lineal, debido en parte, al comportamiento reológico del polímero que se usa como recubrimiento de la fibra. El cambio en la inclinación a altos niveles de desplazamiento es debido a la extinción de la luz. La posición lineal central de la curva es la región activa del sensor. En general, en la medida en que los puntos de deformación se incrementan y/o el espacio entre estos disminuye, la sensibilidad aumenta [1].
II.3 Sensores de Fibra Óptica Modulados en Fase
Los sensores modulados en fase comparan la fase de la luz en una fibra que realiza el papel de sensor con otra luz en una fibra de referencia en un dispositivo conocido como interferómetro. La diferencia de fase puede ser medida con gran sensibilidad, por lo que son mucho más exactos que los sensores modulados en intensidad, y pueden ser usados en un intervalo dinámico mucho más grande. Sin embargo son a menudo más caros.
Usando fibras ópticas monomodo, se ha generado una nueva y amplia gama de sensores en el que el mecanismo básico usado es el cambio en el camino óptico o el cambio en la polarización de la luz que viaja en la fibra. Este tipo de sensor está clasificado como intrínseco y el intervalo de parámetros a medir es muy grande, algunos ejemplos de aplicación son la medición de temperatura, presión, estiramiento, flujo, rotación, campo magnético, etc. Cuando dos (o más) haces de luz interfieren, la visibilidad de las franjas de interferencia que son producidas, están controladas por la coherencia de la luz. Las fibras ópticas multimodo, no mantienen la coherencia espacial del haz guiado, a diferencia de las fibras ópticas monomodo. Es por esta razón que las fibras ópticas monomodo son preferidas en la construcción de interferómetros con fibra óptica.
Las fibras ópticas monomodo también pueden ser incorporadas en sistemas interferométricos convencionales como velocímetros láser Doppler operando como guía de luz flexible entre la fuente láser y la formación de franjas, enriqueciendo por tanto el intervalo de mediciones que pueden realizarse mediante esta técnica. Este tipo de sistema está generalmente clasificado como extrínseco. Ejemplos de algunas aplicaciones son los velocímetros, vibrómetros y sistema holográficos.
cuatro configuraciones de interferómetros. Estas incluyen el de Mach-Zehnder, el Michelson, Fabry-Perot y el Sagnac.
II.3.1 Sensor Interferométrico de Vibraciones Mach-Zehnder
[image:44.595.135.459.280.417.2]En Fig. 2.11 se muestra un diseño híbrido del interferómetro de Mach-Zehnder, incorpora una trayectoria fuera de las fibras, hacia la superficie que vibra. Se pueden usar moduladores de fase o celdas de Bragg en el análisis de la señal [7].
Fig. 2.11. Sistema interferométrico de medición de vibraciones de tipo híbrido Mach-Zehnder.
En este interferómetro la recuperación de la señal es de tipo heterodina, esta se logra con el modulador de fase de fibra óptica excitado por una onda senoidal. Sin embargo, el ancho de banda del procesamiento de la señal está restringido debido a la frecuencia de portadora limitada debido a las restricciones del modulador. Así para niveles de frecuencia más elevados, se prefiere una rejilla de Bragg como moduladora. La portadora modulada en fase, es finalmente demodulada en un PLL (phase locked loop).
II.3.2 Sensor Interferométrico de Vibraciones Fabry-Perot
puede realizar de forma pseudo-heterodina. En la manera en que la superficie varíe su distancia, la frecuencia de la señal portadora pseudo-heterodina, también variará [7].
Fig. 2.12. Interferómetro de Fabry-Perot usando detección pseudo heterodina.
II.3.3 Sensor de Vibraciones de Efecto Doppler
Este sensor está basado en el hecho de que la frecuencia de una onda de luz transmitida en una fibra óptica curvada experimenta un cambio en la región curvada si esta, está sujeta a vibraciones [5]. Esto puede ser explicado a través del efecto Doppler.
a b
Fig. 2.13. Efecto Doppler en una Fibra Óptica.
En el caso de una fibra óptica recta, como lo muestra la Fig. 2.13a, los ángulos de reflexión en los puntos A y B son los mismos, y los corrimientos en frecuencia debidos al efecto Doppler en los puntos A y B se cancelan mutuamente (fD,A+fD,B=0). En el caso de una fibra óptica curvada Fig. 2.13b, el ángulo de reflexión, αA, en el punto A,
es mayor que el ángulo αB, en el punto B, obteniéndose un corrimiento en frecuencia
resultante (fD,A+fD,B≠0), como resultado la frecuencia sufre un corrimiento en la región
Ahora, si la fibra óptica se enrolla de forma espiral como se muestra en Fig. 2.14a, se tiene un incremento en el corrimiento de frecuencia ∆f, incrementándose así la sensibilidad del sensor. Más aún, si el sensor se enrolla de manera elíptica, se obtiene mayor sensibilidad en alguna dirección específica.
[image:46.595.129.469.176.306.2]a b
Fig. 2.14. Algunas configuraciones del sensor de fibra óptica de efecto Doppler. a) Enrollada de forma
espiral. b) Enrollada de forma elíptica.
El velocímetro Láser Doppler se emplea para detectar los corrimientos de frecuencia. La Fig. 2.15 muestra una configuración típica de un velocímetro láser Doppler, en donde se emplean técnicas heterodinas de interferencia para realizar las mediciones [5]. Un modulador acusto-óptico, cambia la frecuencia de la luz de referencia de f0 a f0+fM para producir señales a la salida del sistema con frecuencias
iguales fM+fD (donde fD es el corrimiento de frecuencia debida al efecto Doppler).
Fig. 2.15. Configuración de Velocímetro Láser Doppler.
[image:46.595.89.511.510.614.2]II.3.4 Acelerómetro de Fibra Óptica de Disco Flexible
El acelerómetro (o sismómetro) se muestra en Fig. 2.16. Se compone de un par de espirales planas de fibra óptica y dos discos elásticos soportando una masa entre ellos. Cada espiral de fibra óptica se coloca sobre cada disco elástico de tal forma que mientras un disco alarga la espiral en un lado en respuesta a la aceleración en dirección axial, el otro disco acorte la fibra en el lado opuesto [6]. Estas fibras realizan el papel de brazos en un interferómetro, el cuál entregará una salida proporcional a la flexión de los discos. Debido a que los dos brazos del interferómetro son opuestos (en configuración push-pull), este sensor minimiza los errores debidos a temperatura, presión estática y/o acústica.
Fig. 2.16. Acelerómetro interferométrico de fibra óptica de disco flexible.
Una ventaja de este tipo de sensor es que puede usarse para medir aceleración en forma precisa aún cuando está sumergido en fluidos; ya que si existen variaciones en la presión del fluido, estas se inducen de manera opuesta en los discos, obteniéndose el mismo cambio de longitud en cada fibra en la misma dirección, lo cuál cancela de forma substancial los efectos interferométricos de las variaciones de presión.
estableciendo una frecuencia natural por lo menos 5 veces la mayor frecuencia de vibración a medir [capítulo I], en dónde el desplazamiento de los discos es directamente proporcional a la aceleración de la vibración en un factor 1/ωn2; o bien puede implementarse como sismómetro en donde la frecuencia natural es menor a las frecuencias a medir, y el desplazamiento de los discos se aproximan al desplazamiento de la vibración.
II.4 Conclusiones
Muchos de los sensores intrínsecos y extrínsecos pueden ser multiplexados, ofreciendo la posibilidad de un gran número de sensores implementados en una sola fibra óptica. Las técnicas de multiplexado más comúnmente empleadas son: multiplexado en tiempo, frecuencia, en longitud de onda, en coherencia, en polarización y multiplexado espacial.
Los sensores de fibra óptica han sido implementados en la práctica en dos formas principales; la primera de ellas es como reemplazo de sensores existentes en ya que los sensores de fibra óptica ofrecen mejoras en el desempeño, confiabilidad, seguridad y/o ventajas en costos para el usuario terminal; y la segunda es en el desarrollo y despliegue de los sensores de fibra óptica en nuevas aplicaciones [7].
Para el caso de reemplazo directo de sensores convencionales, el valor inherente del sensor de fibra óptica tiene que ser lo suficientemente alto para desplazar la tecnología anterior. Ya que esto a menudo involucra que se reemplacen las tecnologías con las que ya se estaba familiarizado, por tanto las mejoras que deben de otorgar los sensores de fibra deben ser notables.
Referencias
[1] David A. Krohn. “Fiber Optic Sensors, Fundamentals and Applications” 2nd Ed. 1992, Instrument Society of America, Pp. 29-31.
[2] Brian Culshaw and John Dakin, “Optical Fiber Sensors: Systems and Applications. Volume Two” 1989, Artech House, Pp. 679-682.
[3] Giuliano Conforti, Andrea A. Mencaglia. “Fiber Optic Vibration Sensor, U.S. Patent 5,063,781” Nov. 12, 1991. Rome, Italy.
[4] Helmut Seidel and Peter Deimel. ”Fiber Optic Sensor for Detecting Mechanical Quantities, U.S. Patent 4,848,871” Jul. 18, 1989. Fed. Rep. of Germany.
[5] Kazuro Kageyama, Isamu Ohsawa, Makoto Kanai, Yuhichi Machijima, Fumio Matsumura and Keiichi Nagata. “Development of a New Fiber Optic Sensor and its Application to Health Monitoring of Composite Structures” 2003, The University of Tokyo, Japan.
[6] David A. Brown, Steven L. Garrett and Thomas J. Hoffler. “Fiber Optic Flexural Disk Accelerometer, U.S. Patent 5,317,929” Jun. 7, 1994. Carmel California.
Capítulo III Fibra de Rejilla de Bragg (FBG)
III.1 Introducción
En el caso más simple, una fibra de rejilla de Bragg (FBG (Fiber Bragg Grating en inglés)) puede definirse como una fibra óptica con una modulación periódica en el índice de refracción a lo largo de una corta sección, con la propiedad de reflejar un pico espectral muy angosto de la luz guiada (Fig. 3.1) centrado a la longitud de onda de Bragg [1], dada por la expresión:
[ ]
nm......( )
A .neff
B Λ
λ =2
Donde λB es la longitud de onda de Bragg, Λ es el periodo de la rejilla, neff es el índice de refracción efectivo, que está expresado por: neff=(nH+nL)/2. Aquí nH y nL son los índices de refracción alto y bajo del núcleo respectivamente.
Figura 3.1. Esquema de una fibra de rejilla de Bragg.
Para imprimir una rejilla en una fibra óptica se requiere que la fibra sea fotosensible, la fotosensibilidad es un efecto descubierto por el Dr. Kenneth Hill del CRC (Communications Research Centre) en Canadá en 1978 [2]. Esta propiedad permite que al exponer una guía de onda óptica a un haz láser de luz UV se produzca un cambio permanente en el índice de refracción en la parte expuesta de la guía.
Figura 3.2. Principio de grabado de una Fibra de Rejilla de Bragg mediante un patrón de interferencia de
haces de luz UV.
En una FBG típica el período de la rejilla es de 535nm para obtener una λB centrada en 1550nm. Ya que la modulación en el índice de refracción generalmente es pequeña (del orden de 10-4 a 10-3), se requiere de una gran cantidad de períodos (alrededor de 104) para tener reflexiones en la longitud de onda de Bragg cercanas a 99%. Las rejillas inscritas en fibras ópticas tienen por tanto una longitud que oscila entre 1 y 40mm [4].
La propiedad de que cualquier cambio en el período espacial de esta rejilla (Λ) o en el índice de refracción provoque un corrimiento proporcional en el espectro reflejado y transmitido se usa para construir sensores a base de fibras de Bragg.
III.2 Modelado de la Fibra de Rejilla de Bragg
III.2.1 Teoría de Modo-Acoplado
La perturbación producida en el índice de refracción neff en la rejilla de Bragg sigue la siguiente expresión:
( )
z n( )
z 1 scos 2 z( )
z ...( )
3.1neff eff ⎥
⎦ ⎤ ⎢
⎣ ⎡
⎟ ⎠ ⎞ ⎜
⎝
⎛ +
+
= ϕ
Λ π δ
Donde s es la visibilidad de franjas asociadas con el cambio en el índice de refracción, Λ es el período de la rejilla, ϕ(z) indica la variación del periodo de la rejilla a lo largo del eje longitudinal z de la fibra y δneff un “offset” del cambio en el índice de refracción promediado a lo largo del período de la rejilla [5,6].
Para modelar la rejilla de Bragg a través de la teoría de modos acoplados, se comienza por escribir la componente transversal del campo eléctrico como una superposición de modos ideales (modos en una guía de onda ideal donde no existe perturbación alguna (rejilla de Bragg)). Dado que los modos son indicados con un subíndice m, entonces tenemos que:
(
x,y,z,t)
[
A( )
z exp(
i z)
B( )
z exp(
i z)
]
e( )
x,y exp( ) (
i t ...3.2E m T m m m m m
T =
∑
β + − β ω)
Donde los coeficientes Am(z) y Bm(z) son amplitudes que varían lentamente en el m-ésimo modo viajando en las direcciones +z y –z respectivamente, y la constante de propagación βes simplemente β=(2π/λ)neff El modo de campo transversal emT(x,y) podría describir los modos de frontera. En una guía de onda ideal, los modos son ortogonales y por tanto no existe el intercambio de energía entre ellos de forma alguna. Sin embargo, la presencia de perturbaciones dieléctricas asociadas con las rejillas en la fibra crea acoplamientos entre modos. En tal caso las amplitudes Am(z) y Bm(z) del m-ésimo modo se desarrollan a lo largo de la dirección del eje z de acuerdo a:
(
)
[
(
)
]
(
C C)
exp[
i(
)
z]
...( )
3.3B i z i exp C C A i dz dA m q L qm T qm q q m q L qm T qm q q m β β β β + − − + − + =
∑
∑
(
)
[
(
)
]
(
C C)
exp[
i(
)
z]
...( )
3.4B i z i exp C C A i dz dB m q L qm T qm q q m q L qm T qm q q m β β β β − − + − + − − =
∑
∑
Donde es el coeficiente de acoplamiento transversal entre modos m y q y el coeficiente de acoplamiento longitudinal entre modos m y q.
El coeficiente de acoplamiento transversal esta dado por la siguiente integral:
( )
(
) ( )
(
3 54 x,y,ze x,y dxdy... .
z C T q T qm
∫∫
∞ =ω ∆ε)
Donde ∆ε(x,y,z) es la perturbación en la permitividad, que para el caso de las fibras de Bragg correspondería a los cambios en el índice de refracción, 2nδn para δn mucho más pequeño que n.
El coeficiente longitudinal de acoplamiento CqmL(z), que se define en forma similar al coeficiente de acoplamiento transversal CqmT(z), es despreciable.
En la mayoría de las fibras consideradas, los cambios en el índice de refracción inducidos por la radiación UV representados por δn(x,y,z), son aproximadamente uniformes a lo largo del núcleo de la fibra y despreciables fuera de él. De acuerdo a esta suposición, se puede describir el cambio de índice en el núcleo con una expresión parecida a aquella que describe la perturbación resultante en una FBG (ecuación 3.1), donde δneff (z) es reemplazado con δnco (z). Y además definiendo ahora 2 nuevos coeficientes, el coeficiente de acoplamiento propio y el de acoplamiento cruzado en la siguiente forma:
( )
=( )
∫∫
( )
⋅( )
( )
nucleo * T m T q co coqm n z e x,y e x,y dxdy... . n
z 36
2 δ ω ζ
( )
( ) ( )
372 z... .
s
z qm
qm ζ
κ =
dónde ζqm(z) es un nivel de “dc” de coeficiente de acoplamiento y κqm(z) es un nivel de “ac”. Así, el coeficiente de acoplamiento general puede escribirse como:
( )
z 2( )
z cos 2 z( )
z ...( )
3.8) z (
CT qm qm
Las ecuaciones 3.2-3.8 son ecuaciones de modos acoplados que se pueden usar para describir la respuesta espectral de las rejillas.
III.2.2 Teoría de Modo-Acoplado en FBG
Para el caso de una rejilla de Bragg la interacción dominante ocurre en la longitud de onda para la cual ocurre reflexión de un modo de amplitud A(z) en un modo idéntico propagándose en dirección contraria de amplitud B(z). Bajo tales condiciones las ecuaciones 3.2 y 3.3 puedan simplificarse como sigue:
( )
z i B( ) ( )
z...3.9A i dz
dA+ = ζ+ + + κ +
( )
z i * A( ) (
z...3.10)
Bi dz
dB+ = ζ+ + + κ +
donde A+(z)=A(z)exp(iδdz-ϕ/2), B+(z)=B(z)exp(-iδdz+ϕ/2), y ζ+ es un nivel de “dc” general para los coeficientes de acoplamiento propio definidos como:
) . ...( dz d
d 3 11
2 1 ϕ
ζ δ
ζ + = + −
Con δd siendo la diferencia de fase, que es independiente de z y es definido como sigue:
(
3 12)
1 1
2 n ... .
B eff d ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = − = λ λ π λ π β δ
(
313)
2 . ... neff δ λ π ζ =(
3.14)
... n s
* δ eff
λ π κ
κ = =
Si la rejilla es uniforme a lo largo de la dirección z, entonces δneff es constante y dϕ/dz=0 (es decir la distancia entre franjas permanece constante). Así, κ, ζ, y ζ+ son constantes, esto convierte las ecuaciones 3.9 y 3.10 en ecuaciones diferenciales acopladas ordinarias de primer orden con coeficientes constantes. Para rejillas uniformes de longitud L la reflectividad puede ser encontrada suponiendo una onda propagándose en dirección z+ desde z= −∝, mientras no existe alguna onda propagándose en dirección contraria para z>L/2. Los coeficientes de amplitud ρ=(B+ (-L/2))/(A+(-L/2)) y de potencia reflejada R=|ρ|2 se puede mostrar [1] que son:
( )
( )
( )
2( )
2 2 2( )
2( )
2(
315)
2 2 . ... L L cosh i L L senh L L senh + + + + + − − + − − − = ζ κ ζ κ ζ κ ζ ζ κ κ ρ y
( )
( )
( )
( )
(
)
16 3 2 2 2 2 2 2 22 ... .
L L cosh L L senh R + + + − + − − = ζ κ κ ζ ζ κ
En Fig. 3.3 se ilustra la reflectividad de una FBG uniforme. Esta es calculada con 3.16 para κL=2 y κL=10. Las dos curvas están graficadas contra longitud de onda normalizada dada como.
(
317)
1 1 . ... N L max π ζ λ λ + + =
Donde N es el total de periodos de rejillas (N=L/Λ), y λmax la longitud de onda
10,000. Es interesante notar que conforme N se incrementa el ancho espectral de reflexión se reduce (es decir que rejillas más largas producen mayor selectividad), tal como se verifica en la práctica.
Fig. 3.3. Respuesta espectral de reflexión contra longitud de onda normalizada para una rejilla de Bragg
uniforme.
Usando la ecuación 3.16 se encuentra que la máxima reflectividad para la rejilla de Bragg es:
( ) (
318)
2
. ... L tanh
Rmax = κ
Este máximo ocurre de forma general cuando ζ+=0, o a la longitud de onda:
(
319)
1 ... .
n n B eff eff max λ δ λ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + =
Se produce un ancho de banda uniforme para la rejilla de Bragg entre los primeros ceros a ambos lados de la máxima reflectividad [6]. Así, de 3.16 tenemos que:
(
320)
1
2
0 ... .