“
PROPUESTA DE UN ENLACE DE
COMUNICACIÓN ENTRE
VEHÍCULOS DE EXPLORACIÓN Y
UNA ESTACIÓN
”
T E S I S
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
P R E S E N T A N:
CHRISTIAN URIEL ROMO GUERRERO
NANCY JIMENEZ LOPEZ
RAUL ERNESTO HURTADO TORRES
ASESOR METODOLÓGICO: MALENA DÍAZ CHÁVEZ.
ASESOR TÉCNICO: FERNANDO LAURO SÁNCHEZ MARTÍNEZ.
MÉXICO DF 2009
INSTITUTO POLITÉCNICO NACIONAL
______________________________
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 2
Contenido
Objetivos ... 6
Justificación ... 7
Introducción ... 8
Capitulo 1 ... 11
Esquema General ... 11
1.1 Antecedentes de la Robótica ... 12
Capitulo 2 ... 16
Marco Teórico ... 16
2.1 Control de motores ... 17
2.1.1 Motores de DC ... 17
2.1.2 Motor DC con puente H ... 17
2.1.3 Modulación por ancho de pulso (PWM) ... 18
2.2 Comunicaciones Inalámbricas ... 19
2.2.1 Redes Inalámbricas de Datos ... 19
2.2.2 Tipos de Redes Inalámbricas de Datos ... 21
2.2.2.1 WPAN (Redes Inalámbricas de Área Personal) ... 21
2.2.2.2 WLAN (redes inalámbricas de área local) ... 22
2.2.2.3 WMAN (Redes Inalámbricas de Área Metropolitana) ... 22
2.2.2.4 Redes Globales ... 23
2.2.3 Tecnologías Inalámbricas para redes LAN ... 23
2.2.3.1 Wi-Fi (Fidelidad Inalámbrica) ... 24
2.2.3.2 ZigBee (Estándar de comunicaciones Inalámbricas IEEE 802.15.4) ... 26
2.2.3.3 Topología Ad-Hoc ... 29
2.2.4 Modelos de referencia ... 30
2.2.4.1 Modelo de referencia OSI ... 30
2.2.4.2 Protocolos de comunicaciones TCP/IP ... 32
2.3 Cámara ... 35
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 3
2.3.1.1 Cámaras Web ... 36
2.3.1.2 Cámaras IP ... 37
2.3.1.3 Cámaras Telescópicas... 38
2.3.2 Cámara a emplear ... 39
2.4 Microcontrolador ... 41
2.4.1 Características básicas ... 41
2.4.2 Entradas y salidas digitales ... 42
2.4.3 Interrupción de los puertos ... 44
2.4.4 Temporizador /Contador de 16 bits ... 45
2.4.5 Interfaz de Comunicación Serial Universal (USCI) ... 49
2.5 Código detector de errores ... 54
Capitulo 3 ... 57
Tranceivers ... 57
3.1 El Estándar Inalámbrico ZigBee ... 58
3.1.1 Características ... 59
3.1.2 ZigBee y otras tecnologías inalámbricas ... 60
3.1.3 Estructura ... 62
3.1.3.1 Capa Física (PHY) ... 62
3.1.3.2 Capa de control acceso al medio MAC)... 63
3.1.3.3 Capa de red (NWK) ... 64
3.1.3.4 Capa de aplicación (APL) ... 65
3.1.4 Dispositivos de una red ZigBee ... 66
3.1.4.1 El Coordinador. ... 66
3.1.4.2 Los Enrutadores. ... 66
3.1.4.3 Dispositivos Finales. ... 66
3.1.4.4 Dispositivo de funcionalidad completa (FFD)... 67
3.1.4.5 Dispositivo de funcionalidad reducida (RFD). ... 67
3.1.5 Topologías de las redes Zigbee ... 67
3.1.5.1 Topología en estrella ... 67
3.1.5.2Topología en malla ... 67
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 4
3.1.6 Técnicas de Modulación ... 68
3.1.6.1 Modulación QPSK (Modulación con desplazamiento de fase en cuadratura) ... 69
3.1.6.2 Modulación BPSK (Modulación con desplazamiento de fase binaria) ... 70
3.1.7 Técnica de Acceso al Medio CSMA/CA ... 70
3.2 Módulos de Comunicación XBee ... 72
3.2.1 Circuito básico y Terminales del XBee. ... 72
3.2.3 Comunicación del módulo ... 74
3.2.4 Control de flujo... 74
3.2.5 Modos de Operación. ... 75
3.2.5.1 Modo RECIBIR/TRANSMITIR. ... 75
3.2.5.2 Modo de Bajo Consumo (Sleep Mode). ... 77
3.2.5.3 Modo de Comando... 78
3.2.5.4 Modo de Inactividad ... 79
3.2.6 Configuración del Módulo XBee ... 79
3.2.6.1 Direccionamiento de los módulos ... 80
3.2.6.2 Operación en Modo Transparente ... 81
3.2.6.3 Modo de Conexión Non Beacon. Peer to Peer... 85
3.2.6.4 Conexión Non Beacon c/Coordinador. ... 86
3.2.6.5 Principales comandos AT ... 88
3.2.6.6 Operación en modo API ... 91
3.2.6.7 Estado del modem ... 93
Capitulo 4 ... 97
Configuración y desarrollo del proyecto. ... 97
4.1 Sistema de comunicación ... 98
4.1.1 Computadora- Módulo Tx ... 98
4.1.2 Módulo Tx- Módulo Rx ... 103
4.1.3 Comunicación ... 106
Módulo XBee-Microcontrolador. ... 106
4.1.3.1 Configuración del microcontrolador. ... 107
4.1.3.2 Código de Detección y Corrección de Errores ... 112
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 5
4.3 Sistema motriz del vehículo ... 116
4.3.1 Control del sentido de giro del motor ... 117
4.3.2 Control de velocidad ... 120
4.4 Sistema de alimentación ... 121
4.4.1 Motores ... 122
4.4.2 Módulo XBee y Microcontroladores. ... 123
4.4.3 Cámara IP ... 123
4.5 Sistema de visión del vehículo (Cama IP) ... 124
Conclusiones ... 128
Glosario de Términos ... 131
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 6
Objetivos
Establecer un enlace de comunicación inalámbrico seguro y eficiente entre una estación base y un grupo de vehículos que tendrán como objetivo realizar tareas de exploración.
Proponer diversas configuraciones de red para así comunicarse desde la estación base con todos los vehículos, con un grupo o con solo uno de estos, permitiendo la asignación de distintas tareas a los vehículos, según sean nuestras necesidades.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 7
Justificación
Hemos elegido desarrollar un proyecto relacionado con los vehículos de exploración principalmente porque en él están involucradas varias áreas de la ingeniería en comunicaciones y electrónica. Principalmente relacionamos las áreas especializadas en comunicaciones, electrónica y computación; ya que en el campo laboral tendremos que desenvolvernos en todas estas áreas a pesar de estar especializados solo en el área de Comunicaciones.
Por otro lado, la investigación y desarrollo de vehículos de exploración ha tomado una gran importancia en los últimos años, tanto para la exploración espacial así como en aplicaciones militares, siendo esta última donde más recursos se designan a su desarrollo. Por lo tanto, con el desarrollo de un prototipo, no tan avanzado como los que hoy en día existen, utilizaremos las bases teóricas y prácticas necesarias para su desarrollo e implementación, demostrando que con los conocimientos necesarios es posible construir vehículos de exploración eficientes y con diversas cualidades según las necesidades que tengamos.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 8
Introducción
Actualmente existe una diversidad de vehículos exploradores principalmente construidos por la National Aeronautics and Space Administration (NASA) y los militares de EE.UU. siendo estos los constructores más sofisticados de robots en la actualidad cada uno de ellos con diferentes propósitos.
En este momento uno de los proyectos de la NASA es un nuevo vehículo lunar que busca transformar la exploración espacial, al permitir que los astronautas recorran grandes distancias sin incómodos trajes cuando regresen a la Luna en el 2020. El explorador funciona a batería y viaja a una velocidad de hasta 10 kilómetros por hora. Es parte de varios sistemas y equipos que están siendo desarrollados por la agencia espacial para su regreso programado a la Luna durante la próxima década [1].
En esta tesis se presentan los pasos seguidos para establecer un enlace de comunicación inalámbrico entre una computadora y un grupo de vehículos, así como los resultados obtenidos a partir de las pruebas realizadas con cada una de las propuestas hechas para lograr nuestro objetivo.
Los resultados y la metodología utilizada para obtener estos resultados, están divididos en 4 partes. En la primera consideramos todo lo relacionado a los dispositivos que le darán movimiento a nuestro vehículo y la forma de controlar a estos, según sean nuestras necesidades.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 9 analizamos en tres partes, la primera consistió en la comunicación entre la computadora y el módulo XBee transmisor, la segunda todo lo relacionado a la comunicación entre el módulo XBee transmisor y el módulo XBee receptor, y por ultimo entre el módulo XBee receptor y el microcontrolador. Una vez hecho esto, fue necesario buscar la forma en que la transmisión de datos se hiciera de forma segura. Para esto hicimos la propuesta de un código de detección y corrección de errores, con el cual esperamos reducir la probabilidad de tener errores en la transmisión y su posible corrección.
Teniendo el enlace establecido, analizamos sus alcances, limitaciones y la forma en que nos podríamos comunicarnos con los vehículos.
En la siguiente parte, propusimos los comandos que necesitamos para el control del vehículo, así como de la cámara que el móvil tiene montada sobre él.
Por último configuramos la cámara que está montada en el móvil, para que sea posible la transmisión de imágenes, esto de forma inalámbrica a través de la
Escuela Superior de Ingeniería Mecánica y Eléctrica
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 11
Capitulo 1
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 12
1.1 Antecedentes de la Robótica
Algunos historiadores creen que el origen de la robótica se remonta al año 270 A.C, cuando Ctesibus (un ingeniero griego) diseño órganos y relojes de agua con figura móviles.
Otros creen que su origen se dio en la década de 1770, cuando Pierre Jacket-Droz, un relojero suizo inventor del reloj de pulsera, diseño tres ingeniosas muñecas mecánicas. El hizo que cada muñeca pudiera realizar una función específica: una escribiría, otra tocaría música en un órgano y la otra podría hacer una pintura, y cada una de estas funciones fueron posible mediante el uso de engranes, clavijas y resortes.
Mas reciente, Nikola Tesla diseño un bote sumergible manejado por radiocontrol, lo cual no fue para nada una simple hazaña en aquellos años. Este sumergible fue exhibido en el Madison Square Garden. Nikola Tesla tenía planeado hacer el bote autónomo, sin embargo, la falta de recursos restringió este desarrollo.
La palabra "robot" fue utilizado por primera vez en 1921 en una obra titulada R.U.R (Rossum´s Universal Robot), por el escritor checo Karel Capek. Su origen
es la palabra eslava “robota”, que significa “trabajador”. La obra describe sirvientes
mecánicos, los cuales al ser dotados de emociones, se revelan a sus dueños y los destruyen.
Históricamente, nosotros hemos tratado de dotar a objetos inanimados que tiene parecido con la forma humana, con atributos y habilidades humanas. De esto se
deriva la palabra “androide”, robots con forma humana.
Desde la obra de Karel Copek, los robots han llegado a ser el tema principal en muchas historias de ciencia ficción y películas.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 13 humano y parte maquina o los androides, los cuales son robots especialmente diseñados para parecer humanos.
La National Aeronautics and Space Administration (NASA) y los militares de EE.UU. son los constructores más sofisticados de robots. El principal interés de la NASA en la robótica involucra la exploración del espacio y telepresencia. Los militares, por otra parte utilizan la tecnología en la guerra.
Los vehículos exploradores son robots con grandes capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante, estos siguen su camino por telemando o guiándose por la información recibida de su entorno a través de sus sensores.
La NASA constantemente envía exploradores robóticos no tripulados donde es imposible enviar exploradores humanos. ¿Por qué enviar robots en vez de humanos? La razón es muy simple, es mucho más barato enviar un robot que un humano. Los humanos requieren un enorme sistema de soporte para viajar en el espacio: atmosfera respirable, comida, calor y habitaciones habitables, además que el tiempo de vida de un humano es relativamente pequeño en comparación a las distancias contempladas en nuestro sistema solar.
La Robótica y los Programas de Tecnología de Exploración han desarrollado robots para satisfacer los requisitos planeados y habilitar las nuevas capacidades para explorar las superficies. Estos robots requieren altos niveles de autonomía, incluso la habilidad de realizar navegación local, identifican áreas de interés científico potencial, regulando los recursos a bordo, y actividades de exploración todos controlados en la tierra, para la intervención del control.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 14 Uno de los vehículos desarrollado por la NASA es el Mars Pathfinder que consiste en un lander (Figura 1.1) y un rover (Figura 1.2) el cual es vehículo robótico de exploración. Fue lanzado desde la tierra en Diciembre de 1996 a bordo del cohete Mc Donnell Delta II y comenzó su viaje hacia Marte. El arribó a Marte el 4 de julio de 1997.
El lander lleva tres antenas: la antena de alta ganancia (HGA), usada en el enlace con la Tierra; la antena de baja ganancia (LGA), usada para el enlace con la Tierra durante el viaje hasta Marte; y la antena del LMRE (Lander Mounted Rover Equipment), utilizada para comunicarse con el rover.
Figura1.1: Lander [2].
El rover en el Pathfinder es llamado “Sojourner”. Sojourner es una nueva clase de
explorador robótico pequeño, llamado algunas veces microrover. Es pequeño con un peso de 10.5 kg, una altura de 280 mm, un largo de 630mm y un ancho de 480mm. El rover tiene un único sistema de manejo de 6 ruedas desarrollado por Jet Propulsion Laboratories (JPL) a finales de 1980.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 15 microrover fue a través de varias etapas y prototipos desde Rocky I hasta Rocky IV.
Ambos, el Pathfinder lander y el rover tenían un sistema de imágenes austero. El rover trae consigo un espectrómetro alfa protón de rayos X que es usado para determinar la composición de las rocas. El lander hizo observaciones atmosféricas y meteorológicas, las cuales junto con las imágenes tomadas por el rover fueron enviadas a la tierra por medio de un radio enlace.
El Sojourner era controlado vía telepresencia por un operador en una base desde la Tierra. El operador conducía el rover usando imágenes obtenidas del rover y del lander. A causa del retraso de tiempo entre las acciones del operador en la tierra y de la respuesta del rover que eran entre 6 y 41 minutos dependiendo de la posición relativa de la Tierra y Marte, Sojourner tenía abordo un sistema de inteligencia para ayudarlo a prevenir accidentes como conducirlo hacia un risco.
Figura1.2: Sojourner Rover. Foto cortesía de la NASA [2].
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 16
Capitulo 2
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 17
2.1 Control de motores
El control de motores es una parte esencial del proyecto, ya que de este se basa el movimiento del vehículo, por lo tanto se es necesario conocer sus características y las posibles soluciones para el control de los mismos.
2.1.1 Motores de DC
Los motores DC pueden ser utilizados para movimientos y locomoción. Las especificaciones de la mayoría de los motores de DC muestran altas revoluciones por minuto (rpm) y bajo torque. Los robots necesitan bajo rpm y alto torque. Una caja de cambios (caja de engranes) puede ser conectada a los motores para incrementar su torque mientras se reduce su rpm. Las cajas de cambio usualmente especifican relación entre las rpm de entrada y las rpm de salida.
Figura 2.1: Motor DC
2.1.2 Motor DC con puente H
Cuando construimos un robot, uno espera controlar (apagar o encender) el motor DC con un simple circuito o una señal digital. Además, a uno también le gustaría ser capaz de invertir la dirección del motor. Un puente H cumple con estos requerimientos.
Escuela Superior de Ingeniería Mecánica y Eléctrica
[image:19.612.198.418.140.341.2]Página 18 una dirección. Cuando los interruptores T2 y T3 están cerrados, el motor gira en la dirección opuesta.
Figura 2.2: Puente H con transistores [3]
2.1.3 Modulación por ancho de pulso (PWM)
El puente H controla las funciones de encendido y apagado de un motor DC al igual que su dirección. La función del puente H puede ser mejorada usando PWM (modulación por ancho de pulso) para controlar la velocidad del motor. Cuando la señal PWM está en alto, el motor esta encendido; cuando está en bajo, el motor está apagado. Ya que la señal cambia el estado del motor rápidamente, el voltaje entregado al motor llega a ser un promedio del tiempo en alto contra el periodo de tiempo del ciclo (T-on/T-periodo). Cuanto mayor sea el tiempo en alto, mayor será el promedio de voltaje. El promedio de voltaje es siempre menor que el voltaje entregado (Vcc). El PWM controla esencialmente la velocidad del motor.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 19 puede ser controlado usando un diodo FWD en paralelo a cada transistor del puente H.
Figura 2.3: Modulación de pulso [3]
2.2 Comunicaciones Inalámbricas
A continuación se pretende dar a conocer de forma general las características y herramientas que nos encontramos en el entorno del proyecto, así como los aspectos teóricos que manejaremos a lo largo del desarrollo del mismo.
2.2.1 Redes Inalámbricas de Datos
Las redes inalámbricas (en inglés Wireless Network) son aquellas que se comunican por un medio de transmisión no guiado (sin cables) mediante ondas electromagnéticas. La transmisión y la recepción se realizan a través de antenas.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 20 las pequeñas empresas, los aeropuertos o las grandes compañías en los que se dispone de redes inalámbricas en las computadoras.
Aunque las tecnologías que hacen posible las comunicaciones inalámbricas (laser, infrarrojo y radio principalmente) existen desde hace muchos años, su implantación comercial no ha sido posible hasta fechas recientes. El primer servicio que se liberó del cable fue la telefonía, la transmisión de voz. La telefonía móvil apareció en los años sesenta y poco a poco se ha ido desarrollando hasta superar a la telefonía fija en el número de líneas.
En 1997 el IEEE añadió un nuevo miembro a la familia 802 que se ocupa de definir las redes de área local inalámbricas. Este nuevo miembro fue el estándar 802.11. El mayor inconveniente de los sistemas inalámbricos definidos originalmente por 802.11 es que trabajaba a velocidades de 1 y 2 Mbps. Esto, unido al costo inicial de los equipos hizo que la tecnología inalámbrica no se desarrollara hasta 1999.
Para poder disponer de una red inalámbrica, solo hace falta instalar una tarjeta de red inalámbrica en las PC involucrados, hacer una pequeña configuración y listo. Esto quiere decir que el instalar una red inalámbrica es un proceso mucho más rápido y flexible que instalar una red cableada. Una gran ventaja de las redes inalámbricas es que permiten a sus usuarios moverse libremente sin perder la comunicación.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 21
2.2.2 Tipos de Redes Inalámbricas de Datos
A continuación clasificaremos los sistemas de comunicaciones inalámbricas de acuerdo con su alcance. Se le llama alcance a la distancia máxima a la que pueden situarse las dos partes de la comunicación inalámbrica.
Figura 2.4: Cobertura y estándares Wireless [4]
2.2.2.1 WPAN (Redes Inalámbricas de Área Personal)
Las redes inalámbricas de área personal o WPAN (Wireless Personal Area Network) cubren distancias inferiores a los 10 metros. Estas soluciones están pensadas para interconectar los distintos dispositivos de un usuario. Éste es el caso de la tecnología Bluetooth o de IEEE 802.15.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 22
2.2.2.2 WLAN (redes inalámbricas de área local)
Las redes inalámbricas de área local o WLAN (Wireless Local Area Netwok) cubren distancias de unos cientos de metros. Estas redes están pensadas para crear un entorno de red local entre las PC o terminales situados en un mismo edificio grupo de edificios. Este es el caso de Wi-Fi o homeRF, por ejemplo.
Figura 2.6: Ejemplo de red WLAN [6]
2.2.2.3 WMAN (Redes Inalámbricas de Área Metropolitana)
Las redes inalámbricas de área metropolitana o WMAN (Wireless Metropolitan Area Network) pretenden cubrir el área de una ciudad o entorno metropolitano.
Los protocolos LMDS (Local Multipoint Distribution Service, “Servicio Local de Distribución Multipunto”) o WiMAX (Worldwide Interoparability for Microwave
Access,”Interoperabilidad Mundial para Accesos de Microondas”).
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 23
2.2.2.4 Redes Globales
Y finalmente tenemos las redes globales con posibilidad de cubrir toda una región (país o grupo de países). Estas redes se basan en la tecnología celular y han aparecido como evolución de las redes de comunicaciones de voz. Este es el caso de las redes de telefonía móvil conocidas como 2.5G o 3G. En comunicaciones móviles de voz se les llama 1G (primera generación) a los sistemas analógicos (tipo GSM o CDMA), 2.5G a los digitales con soporte para datos alta velocidad (tipo GPRS, IS-95B o EDGE etc.) y 3G o tercera generación, los nuevos sistemas de telefonía celular con capacidad de gran ancho de banda actualmente implementándose en México, aunque también se están implementando 4G y 5G en otras países.
Figura 2.8: Redes globales [6]
2.2.3 Tecnologías Inalámbricas para redes LAN
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 24
2.2.3.1 Wi-Fi (Fidelidad Inalámbrica)
Durante bastantes años las redes inalámbricas de computadoras se llevaban a cabo utilizando soluciones particulares de cada fabricante, estas soluciones llamadas propietarias, tenían el gran inconveniente de no poder interconectar equipos de diferentes fabricantes. La única forma de resolver este problema es desarrollar un sistema normalizado que aceptan los fabricantes como sistema común. Idealmente, son los organismos internacionales quien realiza este trabajo con ayuda de los propios interesados.
En el caso de de las redes locales inalámbricas, el sistema que se está imponiendo es el normalizado por el IEEE con el nombre de 802.11g. A esta norma se le conoce más habitualmente como Wi-Fi “Fidelidad inalámbrica”.
Con el sistema Wi-Fi se pueden establecer comunicaciones a una velocidad máxima de 11Mbps, alcanzando distancias de hasta varios cientos de metros. No obstante, versiones más recientes de esta tecnología permiten alcanzar hasta los 22, 54 y hasta 100 Mbps.
Actualmente son principalmente tres los estándares dentro de la familia IEEE 802.11 que están siendo utilizados: 802.11a (evolución de 802.11e/h), que define una conexión de alta velocidad; 802.11b, el que goza de una más amplia aceptación y que aumenta la tasa de transmisión de datos propia de 802.11 original, y 802.11g, compatible con él, pero proporciona aun mayores velocidades. Todos ellos se engloban dentro de la familia Wi-Fi.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 25 WLAN 802.11b
En el año 1999 se aprobó el estándar 802.11b, una extensión del 802.11 para WLAN empresariales, con una velocidad de hasta 11Mbit/s, que emplea la banda de 2,4 GHz. Permite mayor velocidad y su alcance llega a 300 metros, suficiente para un entorno de oficina o residencial.
El rango de frecuencias de 2,4 a 2,4835 GHz, se divide en canales (11 para Estados Unidos y 9 para Europa), definiendo unas velocidades de 11, 5.5 ,2 y 1 Mbit/s por canal.
WLAN 802.11g
El IEEE también aprobó en el año 2003 el estándar 802.11g, compatible con el 802.11b, capaz de alcanzar una velocidad de hasta 54Mbit/s, para competir con los otros estándares que prometen velocidades mucho más elevadas pero que son incompatibles con los equipos 802.11b ya instalados, aunque pueden coexistir en el mismo entorno debido a que las bandas de frecuencias que emplean son distintas.
WLAN 802.11a
El IEEE ratifico en julio de 1999 el estándar de 802.11a, alcanza una velocidad de hasta 54 Mbit/s en la banda 5GHz, menos congestionada y, ahora, con menos interferencias, pero con un alcance limitado de 50m, lo que implica tener que montar más puntos de acceso que si se utilizarse 802.11b para cubrir la misma área, con el coste adicional que con ello supone.
Velocidad de datos máxima
(Mbps)
Número de
canales Frecuencia Capacidad
802.11b 11 3 2.4 Ghz 33Mbps
802.11g 54 3 2.4 Ghz 162Mbps
802.11a 54 8 5.7 Ghz 432Mbps
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 26 IEEE 802.11e (Calidad de Servicio)
Este grupo trabaja en los aspectos relacionados con la calidad de servicio (QoS o Quality of Services). En el mundo de las redes de datos, calidad de servicio significa poder dar más prioridad de transmisión a unos paquetes de datos que otros, dependiendo de la naturaleza de la información (voz, video, imágenes, etc.)
IEEE 802.11h (Gestión de espectro)
Este grupo de trabajo pretende conseguir una mejora de la norma 802.11a en cuando la gestión del espectro radioeléctrico. Este punto es una de las desventajas que tiene 802.11a frente a su competidor europeo HiperLAN2.
IEEE802.11i (Seguridad)
El sistema de seguridad que utiliza 802.11 está basado siempre en el sistema WEP. Este sistema ha sido fuertemente criticado debido a su debilidad. El sistema sobre el que está trabajando este estándar es el TKIP (Temporal Key Integrity Protocol, Protocolo de Integridad de Clave Temporal).
2.2.3.2 ZigBee (Estándar de comunicaciones Inalámbricas IEEE
802.15.4)
ZigBee es un estándar de comunicaciones inalámbricas diseñado por la ZigBee Alliance. Es un conjunto estandarizado de soluciones que pueden ser implementadas por cualquier fabricante. ZigBee está basado en el estándar IEEE 802.15.4 de redes inalámbricas de área personal y tiene como objetivo las aplicaciones que requieren comunicaciones seguras con baja tasa de envío de datos y maximización de la vida útil de sus baterías. Debido a esto utiliza una modulación digital PSK, de la cual se hará mención más adelante.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 27 Características Generales ZigBee/ IEEE 802.15.4
Doble PHY (868/915 MHz y 2.4 GHz)
Razón de transferencia de 250 kbps (a 2.4 GHz), 40 Kbps (a 915 MHz) y 20 Kbps (a 868 MHz)
Acceso de canal CSMA-CA
Bajo consumo de potencia (la duración de la batería dura varios meses incluso años)
Múltiples topologías: estrella, peer to peer, malla.
Rango de alcance de 50m. típico ( de 5m a 500m basado sobre el medio ambiente)
Estructura de la Trama
La estructura de la trama ha sido diseñada para mantener la complejidad al mínimo, al mismo tiempo hacerla lo suficientemente sólida para su transmisión en un canal ruidoso. Cada uno de los protocolos de capa añade a la estructura encabezados.
El estándar IEEE 802.15 MAC (Control de acceso al medio) define cuatro estructuras de trama:
1. Trama guía, usada por un coordinador para transmitir guías. 2. Trama de datos, usada para todas las transferencias de datos.
3. Trama de reconocimiento, utilizada para confirmar la recepción de la trama exitosamente.
Escuela Superior de Ingeniería Mecánica y Eléctrica
[image:29.612.89.552.150.353.2]Página 28 La trama de datos se muestra a continuación en la Figura 2.10.
Figura 2.10: Trama de ZigBee [9]
El Protocolo de datos de la unida física es el total de información enviada por el aire. Como se muestra en la Figura 2.10 por encima de la capa física añade los siguientes encabezados:
Secuencia de preámbulo 4 Bytes
Inicio del delimitador de trama 1 Byte
Longitud de trama 1 Byte
La MAC añade los siguientes encabezados:
Control de trama 2 Bytes
Número de secuencia de datos 1 Byte
Información de dirección 4 - 20 Bytes
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 29
2.2.3.3 Topología Ad-Hoc
Es una topología de red en la que los dispositivos inalámbricos se comunican directamente entre sí, eliminando la necesidad de un punto de acceso o una conexión a una red cableada (estación base). El modo Ad-Hoc también se denomina modo peer-to-peer (de igual a igual) o IBSS Independ Basic Service Set.
Las redes ad hoc son la última frontera de la comunicación inalámbrica. Esta tecnología permite que los nodos de la red puedan comunicarse directamente entre sí utilizando transceptores inalámbricos sin la necesidad de una infraestructura fija. Esta es una distinción muy característica de las redes ad hoc con respecto a los más tradicionales redes inalámbricas, tales como las redes celulares y redes LAN inalámbricas, en la que los nodos se comunican entre sí a través de estaciones base.
Los principales retos con la tecnología ad-hoc son los siguientes:
- Conservación de la energía: Dado que las unidades en las redes ad hoc son típicamente equipadas con baterías, uno de los principales objetivos de diseño es utilizar esta cantidad limitada de energía tan eficiente como sea posible.
- Baja calidad en la comunicación: La comunicación en un canal inalámbrico es, en general, mucho menos confiable que en un canal por cable. Además, la calidad de la comunicación está influenciada por factores ambientales (clima, presencia de obstáculos, interferencias con las redes de radio, etc), que son variables en el tiempo.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 30
2.2.4 Modelos de referencia
Como ya se comentado, el hecho de trabajar en entornos inalámbricos obliga a tener en cuenta numerosos aspectos que son inherentes al medio de transmisión así como la repercusión de estos efectos en los niveles superiores. Con esta finalidad, se hace inevitable hablar de capas, niveles, estándares y protocolos, puesto que, lógicamente, las redes inalámbricas no dejan de ser redes de computadores.
2.2.4.1 Modelo de referencia OSI
En 1977 la ISO (Organización Internacional para la Estandarización), organismo formado por representantes de la industria, creó un comité para desarrollar estándares para la comunicación de datos y con esto lograr la interoperabilidad entre sistemas heterogéneos. El resultado de este esfuerzo fue un modelo de referencia OSI.
El modelo OSI sirve como una guía o una serie de lineamientos para las tareas de comunicación, más no especifica un estándar de comunicación, sin embargo, muchos estándares y protocolos cumplen con lo que establece el modelo.
Capas del modelo de referencia OSI.
El modelo OSI tiene siete capas (Figura 2.11), las cuales se describen a continuación:
Capa Física
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 31 Capa de Enlace de Datos
Es responsable de transferir la información sobre el canal. Provee medios de sincronización para controlar el flujo de la capa física, también es capaz de identificar cada bit de la cadena transmitida o recibida. Una de sus más importantes funciones es la detección de errores y el manejo de mecanismos de recuperación.
Capa de Red
Esta capa especifica la interfaz entre el equipo de datos del usuario y la red. También especifica los métodos de enrutamiento y de comunicación entre redes.
Capa de Transporte
Esta capa define la interconexión entre la capa de red y las tres capas superiores. Está diseñada para aislar al usuario de las características físicas de la red.
Capa de Sesión
Constituye la interfaz hacia la capa de transporte. Provee medios para intercambiar organizadamente la información entre usuarios.
Capa de Presentación
Se encarga de la presentación de la información, no le interesa su significado. Su papel por ejemplo, es el de recibir enteros, reales, cadenas, etc. de la capa más alta y negociar con su capa símil remota respecto a la presentación de estos datos.
Capa de Aplicación
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 32
Figura 2.11: Capas del modelo OSI
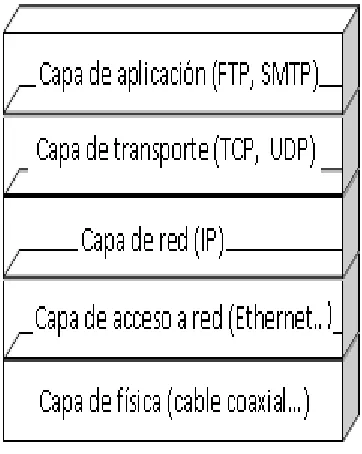
2.2.4.2 Protocolos de comunicaciones TCP/IP
Es importante conocer las características del protocolo TCP/IP ya que en este se basa la comunicación de la cámara que se utilizara para el desarrollo de nuestro proyecto. Además son los protocolos de más uso mundial, ya que pueden servir para comunicarse a través de un conjunto de redes interconectadas y son igualmente apropiados para la comunicación ya sea en redes WAN o LAN.
TCP/IP no es solo un protocolo, sino que comprende toda una familia muy completa de diversos protocolos que prestan diversos servicios. Las siglas TCP/IP son por el nombre de dos protocolos TCP (Trasmisión Control Protocol, Protocolo de Control de Transmisión), y el IP (Internet Protocol, Protocolo de Internet).
La familia de protocolos TCP/IP, comprende entre otros los siguientes protocolos:
IP (Internet Protocol)
TCP (Trasmision Control Protocol) ARP (Address Resolution Protocol)
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 33 ICMP (Internet Control Message Protocol)
FTP (File Transfer Protocol)
SMTP (Simple Mail Transfer Protocol)
SNMP (Simple Network Management Protocol) NFS (Network File System)
HTTP (Hyper Text Tranfer Protocol)
Para poder aplicar el modelo TCP/IP en cualquier equipo, es decir, independientemente del sistema operativo, el sistema de protocolos TCP/IP se ha dividido en diversos módulos. Cada uno de éstos realiza una tarea específica. Además, estos módulos realizan sus tareas uno después del otro en un orden específico, es decir que existe un sistema estratificado. Ésta es la razón por la cual se habla de que es un modelo de capas.
El término capa se utiliza para reflejar el hecho de que los datos que viajan por la red atraviesan distintos niveles de protocolos. Por lo tanto, cada capa procesa sucesivamente los datos (paquetes de información) que circulan por la red, les agrega un elemento de información (llamado encabezado) y los envía a la capa siguiente.
Escuela Superior de Ingeniería Mecánica y Eléctrica
[image:35.612.217.398.105.332.2]Página 34
Figura 2.121: Capas de TCP/IP
Capa de aplicación
Es el nivel más alto, los usuarios llaman a una aplicación que acceda servicios disponibles a través de la red de redes TCP/IP. Una aplicación interactúa con uno de los protocolos de nivel de transporte para enviar o recibir datos. El programa de aplicación pasa los datos en la forma requerida hacia el nivel de transporte para su entrega.
Capa de transporte
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 35 Capa de red
La capa Internet maneja la comunicación de una máquina a otra. Ésta acepta una solicitud para enviar un paquete desde la capa de transporte, junto con una identificación de la máquina, hacia la que se debe enviar el paquete. La capa Internet también maneja la entrada de datagramas, verifica su validez y utiliza un algoritmo de ruteo para decidir si el datagrama debe procesarse de manera local o debe ser transmitido.
Capa acceso a la red
El software TCP/IP de nivel inferior consta de una capa de interfaz de red responsable de aceptar los datagramas IP y transmitirlos hacia una red específica. Una interfaz de red puede consistir en un dispositivo controlador o un complejo subsistema que utiliza un protocolo de enlace de datos propios.
2.3 Cámara
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 36
2.3.1 Tipos de cámaras
A continuación nos dedicamos a mencionar los distintos tipos de cámaras que existen en el mercado que cubren distintas necesidades, siendo el objetivo mostrar las posibles variaciones que el proyecto en cuestión podría tener por lo anterior mencionado, por flexibilidad al final se escogerá un tipo de cámara que cumpla las necesidades deseadas para la implementación en el proyecto.
2.3.1.1 Cámaras Web
La primera cámara Web fue fabricada en 1991en el Departamento de Informática de la Universidad de Cambridge por Quentin Stafford-Fraser y Paul Jardetzky. Es una cámara sencilla regularmente barata y están diseñadas para enviar vídeos en vivo y grabados así como capturas de imagen a través de la red a uno o más usuarios.
Escuela Superior de Ingeniería Mecánica y Eléctrica
[image:38.612.233.380.87.301.2]Página 37 Figura 2.13: Cámara WEB
2.3.1.2 Cámaras IP
Una cámara IP ó también conocida como cámara de red puede ser descrita como la combinación de una cámara y una computadora en una sola unidad, la cual captura y transmite imágenes en vivo a través de una red.
Algo muy importante es que a diferencia de cualquier otro tipo de cámara, las cámaras de red no necesitan estar conectadas a una computadora ni dependen de ella, son totalmente independientes y autoadministrables, lo cual incrementa aún más su funcionalidad. Su costo no es muy elevado y la calidad varía desde media a alta, la tendencia actual es que la mayoría son inalámbricas debido al gran crecimiento de las redes inalámbricas.
Escuela Superior de Ingeniería Mecánica y Eléctrica
[image:39.612.234.383.177.409.2]Página 38 Prácticamente las posibilidades son ilimitadas y tienen la ventaja de que el video al ser transmitido por la red puede ser consultado en cualquier lugar del mundo. La figura 2.14 muestra una cámara IP disponible en el mercado
Figura 2.14: Cámara IP
2.3.1.3 Cámaras Telescópicas
Este tipo de cámaras son para usos más específicos observaciones astronómicas y la vigilancia en campos abiertos. Una cámara telescópica no es más que una cámara y un telescopio unidos en un solo sistema, que da como resultado una cámara de gran alcance.
Esta cámara tiene un precio más elevado debido a sus características siendo para nosotros un impedimento para adquirirla, a continuación se presentan sus características principales
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 39
Con o sin un filtro bloqueador IR
[image:40.612.217.397.161.273.2] Rápida transferencia de imágenes con FireWire Software para Windows® enviado como estándar
Figura 2.15: Cámara Telescópica
2.3.2 Cámara a emplear
La cámara que hemos elegido es la Cámara IP ya que al analizarlas (Tabla 2.2) existen ventajas a favor de esta, cuando se compara ya sea con una cámara web basada en PC ó con una cámara telescópica, principalmente podemos mencionar que una cámara IP es una unidad independiente y no requiere de ningún otro dispositivo ó computadora para la captura y transmisión de imágenes ya que cuenta con su propio servidor web incluido que realiza todo este trabajo, lo único que se requiere es una conexión de red estándar. Como la cámara se monto sobre el vehículo no se puede utilizar una cámara que tenga que estar conectada a una PC.
A continuación mencionamos los diferentes parámetros de la cámara IP por lo cual tomamos la decisión de utilizarla.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 40 Funcionalidad - Todo lo que se necesita para transmitir video sobre la red está incluido en la cámara.
Instalación - Solo se requiere asignar la IP para empezar a transmitir video. Facilidad de Uso - Se puede administrar y ver el video en una computadora estándar con un navegador de internet.
Estabilidad - Ya que no requiere de componentes adicionales se tienen una mayor estabilidad.
Calidad - Proporcionan imágenes de alta calidad en formato MJPEG ó MPEG4.
Costo - El costo es muy bajo ya que el costo total para transmitir video es el de la cámara.
Cámara WEB Cámara IP Cámara Telescópica
Precio Bajo Medio Alto
Distancia Corta Media Grandes distancias
en campo abierto Calidad 1.3 megapixeles 320x240 pixeles 720 x 480 Píxel
Tamaño Pequeño Pequeño a mediano Mediano
Instalación Fácil Sencilla Sencilla
Interfaz con la PC USB No utiliza Mini USB
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 41
2.4 Microcontrolador
Un microcontrolador es un circuito integrado o chip que incluye en su interior dos unidades funcionales, Memoria y Unidades de E/S. Son diseñados para disminuir el costo económico y el consumo de energía de un sistema en particular.
2.4.1 Características básicas
La familia de Microcontroladores MSP430F20xx de Ultra Baja Potencia son la última solución en aplicaciones hardware de bajo consumo alimentadas por batería que requieren una alta velocidad de computo (16 MIPS), con todas las cualidades y prestaciones del procesamiento de 16bits.
Arquitectura de Ultra Baja Potencia que extiende la vida de la batería de alimentación: Retención RAM a 0.1uA - Modo Real -Time Clock a 0.8uA - Modo Activo a 250uA / MIPS .
Alto desempeño análogo, ideal para soportar aplicaciones de medición precisas (instrumentación).
Periféricos integrados tales como Conversores Análogos – OP AMPS, Comparadores Análogicos, ADCs desde 10 hasta 16bits tipo Sigma - Delta con PGA integrado.
Presentaciones desde 4x4mm.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 42
2.4.2 Entradas y salidas digitales
Los dispositivos MSP430-2012/2013 pueden tener 2 puertos de E/S digitales implementados P1, P2, P3, P4.
Las Características de la E/S digital incluyen:
Las líneas de E/S se pueden programar de forma independiente Valida cualquier combinación de entrada o salida
Registros de entrada y salida de datos independientes
Resistores de pull- Up o pull-down individualmente configurables
Para poder configurar las entradas I/O existen los siguientes registros:
Registro de selección de función ( PxSEL)
Selecciona si la terminal trabaja como E/S digital ó como línea que pertenece a un periférico.
Bit = 0: La terminal de trabaja como E/S digital
Bit = 1: La terminal trabaja como línea de algún periférico
Registro de dirección PxDIR
Selecciona si la línea correspondiente será de entrada o salida
Bit = 0: La línea del puerto está configurada como entrada. Bit = 1: La línea del puerto está configurada como salida.
Registro de entradas PxIN
Registro donde se lee el estado actual de la(s) línea(s) de entrada
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 43
Bit=1: La entrada está en alto
Registro de salidas PxOUT
Registro donde se escribe(n) la(s) línea(s) de salida cuando la línea se configura para funcionar como Salida y el resistor de pull-up/down está deshabilitado.
Bit = 0: La salida está en bajo Bit = 1: La salida está en alto
Si la resistencia de pull-up/pull-down de la Terminal está habilitada, el bit correspondiente del registro PxOUT selecciona si la resistencia será de pull-up o pull-down.
Bit = 0: La resistencia interna se conecta a tierra (pull-down) Bit = 1: La resistencia interna se conecta a Vcc (pull-up)
Registro de habilitación de resistencia de Pull−Up/Down (PxREN)
Registro donde se habilitan las resistencias internas(solo para líneas configuradas como entradas). El bit correspondiente del registro PxOUT selecciona si la resistencia es de pull- up ó pull – down
Bit = 0: Resistencia de Pull-up/down deshabilitada Bit = 1: Resistencia de Pull-up/down habilitada
Para seleccionar si la resistencia es de pull- up o pull down en el bit que corresponda en el registro PxOUT
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 44
2.4.3 Interrupción de los puertos
Cada línea de los puertos 1 y 2 tienen capacidad de interrupción., estas se configuran mediante los registros PxIFG, PxIE, y PxIES.
Registros de habilitación de interrupciones PxIE
Registro donde se habilita(n) la(s) línea(s) de interrupción
Bit = 0: La interrupción está deshabilitada Bit = 1: La interrupción está habilitada
Registros de selección de flanco de interrupción PxIES
Registro donde se programa el flanco que activa la interrupción (0=subida, 1 = bajada)
Bit = 0: La bandera PxIFGx es uno con una transición de bajo a alto. Bit = 1: La bandera PxIFGx es uno con una transición de alto a bajo.
Registros de banderas de interrupción PxIFG
Registro de banderas de interrupción, el bit correspondiente se pone en 1 al ocurrir el flanco programado en IES.
Bit = 0: No hay interrupción pendiente Bit = 1: Interrupción pendiente.
Configuración de las líneas no utilizadas
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 45
2.4.4 Temporizador /Contador de 16 bits
El registro Temporizador/contador (temporizador) de 16 bits TAR, se incrementa o decrementa (dependiendo del modo de operación) con cada flanco positivo de la señal de reloj. El TAR puede ser leído ó escrito por programa. Adicionalmente el temporizador puede generar una interrupción cuando llega a su sobre flujo (pasa de su valor máximo de cuenta, a cero).
Selección de la fuente de reloj y división.
El reloj del temporizador puede ser conectado a ACLK, SMCLK o manejado de forma externa mediante las líneas TACLK o INCLK. La fuente de reloj se selecciona mediante los bits TASSELx localizados en el registro de control del TAR.
Modo de control del temporizador
El temporizador tiene 4 modos de operación como se describe en la siguiente tabla, paro, ascendente, continuo y ascendente/descendente. El modo de operación se selecciona con los bits MCx presentes en el registro de control del TAR (TACTL).
MCx Modo Descripción
00 Apagado El temporizador está detenido
01 Ascendente El temporizador cuenta repetidamente desde cero a el valor de TACCR0
10 Continuo El temporizador repetidamente cuenta desde o a 0FFFFh 11 Ascendente/
Descendente El temporizador repetidamente cuenta de cero hasta el valor del TACCR0 y de vuelta hacia cero.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 46 Modo Ascendente
El modo ascendente se utilice cuando el periodo del temporizador debe ser distinto de 0FFFFH cuentas. El temporizador cuenta repetidamente de forma ascendente hasta el valor asignado en el registro TACCR0, el cual define el periodo El número de cuentas del temporizador en un periodo es de TACCR0+1. Cuando el valor del temporizador es equivalente al TACCR0 el temporizador restablece su cuenta a cero. Si se selecciona el modo ascendente cuando el temporizador tiene un valor mayor al TACCR0, el temporizador inmediatamente restablece su cuenta comenzando desde cero. Como se puede observar en la figura 2.17.
Figura 2.17: Modo Ascendente
Modo continúo
En el modo continuo, el temporizador cuenta repetidamente desde cero hasta 0FFFFh y comienza de nuevo en cero, como se muestra en la figura siguiente. El registro de captura/comparación TACCR0 trabaja de la misma forma que los otros registros de captura/comparación.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 47 Modo Ascendente/Descendente
El modo ascendente/descendente se utilizará cuando el periodo deba ser distinto de 0FFFFh cuentas y además se requiera de generación de pulsos simétricos. El temporizador contara hasta el valor cargado en el registro de comparación TACCR0 y regresará a cero, esto lo hará de forma infinita. Observe en la siguiente figura que el intervalo de tiempo es el doble de lo que está cargado en el TACCR0.
Figura 2.192: Modo Ascendente/Descendente
Bloques de captura/comparación
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 48 Modos de salida
Los modos de salida están definidos por los bits OUTMODx y están descritos en la siguiente tabla. La señal de salida OUTx es cambiada con el flanco positivo de la señal de reloj del temporizador para todos los modos excepto el modo 0. Los modos de salida 2, 3, 6 y 7 no se utilizan para la unidad de salida cero porque la señal EQUx = EQU0.
OUTMODX MODO DESCRIPCION
000 Salida La señal de salida OUTx esta definida por el bit OUTx. La señal OUTx se actualiza cuando OUTx se actualiza.
001 Set La salida es uno cuando el temporizador cuenta hasta el valor del registro TACCRx. Permanece en uno hasta que se restablece el temporizador, o hasta que otro modo de salida se seleccione y afecte la salida
010 Toggle/Reset La salida es invertida cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. La salida será cero cuando el TAR llegue al valor del registro TACCR0.
011 Set/Reset La salida es uno cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. La salida será cero cuando el TAR llegue al valor del registro TACCR0.
100 Toggle La salida es invertida cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. El periodo de la salida es el doble que el periodo del temporizador
101 Reset La salida es cero cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. Permanece en 0 hasta que se restablece el temporizador, o hasta que otro modo de salida se seleccione y afecte la salida
110 Toggle/Set La salida es invertida cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. La salida Será uno cuando el TAR llegue al valor del registro TACCR0.
111 Reset/Set La salida es cero cuando la cuenta del temporizador cuenta hasta el valor del registro TACCRx. La salida será uno cuando el TAR llegue al valor del registro TACCR0.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 49
2.4.5 Interfaz de Comunicación Serial Universal
(USCI)
La interfaz de comunicación serial universal (USCI) soporta múltiples modos de comunicación serial con un módulo hardware.
Descripción general del USCI
El módulo de interfaz de comunicación serial universal (USCI) soporta múltiples modos de comunicación serial. Diferentes módulos USCI soportan diferentes modos. Cada diferente módulo USCI es nombrado con una letra diferente. Por ejemplo, USCI_A es diferente de USCI_B, etc. Si más de un módulo USCI idéntico es implementado en un mismo dispositivo, aquellos módulos son nombrados con números que se van incrementando. Por ejemplo, si un dispositivo tiene dos módulos USCI_A, ellos son nombrados USCI_A0 y USCI_A1. Observa la hoja de datos del dispositivo para determinar cuáles módulos USCI, si los hay, son implementados en determinados dispositivos.
El módulo USCI_Ax soporta:
Modo UART
Formación del pulso para comunicaciones IrDA
Detección automática de la tasa de baudios para comunicaciones LIN Modo SPI
El módulo USCI_Bx soporta:
Modo Modo SPI
Introducción USCI: modo UART
En modo asíncrono, el módulo USCI_Ax conecta el MSP430 a un sistema externo vía dos pines externos, UCAxRXD y UCAxTXD. El modo UART es seleccionado cuando el bit UCSYNC es limpiado.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 50 Dato 7 u 8 bits con o sin paridad
Registro de cambio de transmisor independiente y receptor Registros buffer de transmisor aislado y receptor
Transmisor y receptor de datos LSB-first o MSB-first
Protocolos de comunicación Built-in idle-line y address-bit para sistemas multiporcesador.
Receiver start-edge detection for auto-wake up from LPMx modes
Programmable baud rate with modulation for fractional baud rate support Banderas de estado para detección de error y supresión
Banderas de estado para detección de direcciones
Capacidad de interrupción independiente para transmisor y receptor
Operación USCI: Modo UART
En modo UART, el USCI transmite y recibe caracteres a una tasa de bits asíncrona hacia otro dispositivo. La duración para cada carácter está basada en la tasa de baudios seleccionada del USCI. Las funciones de transmisión y recepción usan la misma frecuencia de tasa de baudios.
Formato del carácter
El formato de un carácter UART, consiste en un bit de inicio, 7 u 8 bits de datos, con o sin paridad, un bit de direccionamiento (modo address-bit), uno o dos bits de parada. El bit UCMSB controla la dirección de la transferencia y selecciona LSB o MSB primero. LSB-first es típicamente requerido para comunicaciones UART.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 51 Formato de comunicación asíncrono
Cuando dos dispositivos comunicados asíncronamente, el formato no multiprocesador es requerido para el protocolo de comunicación. Cuando tres o más dispositivos se comunican, la USCI soporta el formato de comunicación multiprocesador idle-line y address-bit.
Formato multiprocesador idle-line (línea desocupada o vacía)
Cuando UCMODEx = 01, el formato multiprocesador idle-line es seleccionado. Bloques de datos son separados por un tiempo desocupado en la línea de transmisión o recepción. Una línea receptora desocupada es detectada cuando 10 o más marcas son recibidas después de uno o dos bits de parada de un carácter. La tasa de baudios generadora es apagada después de la recepción de una línea desocupada hasta que el próximo inicio es detectado. Cuando una línea desocupada es detectada el bit UCIDLE es puesto en uno.
El primer carácter recibido después de un periodo desocupado es un carácter dirección. El bit UCIDLE es usado como una etiqueta de dirección para cada bloque de caracteres. En un forma multiprocesador idle-line, este bit es puesto a uno cuando un carácter recibido es una dirección.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 52 El bit UCDORM es usado para controlar la recepción de datos en un formato multiprocesador idle-line. Cuando UCDORM = 1, todos los carácter no-dirección son ensamblados pero no transferidos al UCAxRXBUF, y las interrupciones no son generadas. Cuando un carácter dirección es recibido, el carácter es transferido al UCAxRXBUF, UCAxRXIFG es puesto a uno, y cualquier bandera de error aplicable es puesta a uno, cuando UCRXEIE = 1. Cuando UCRXEIE = 0, y un carácter dirección es recibido pero tiene un error de trama o error de paridad, el carácter no es transferido al UCAxRXBUF y UCAxRXIFG no es puesto a uno.
Si una dirección es recibida, el software de usuario puede validar la dirección y debe reiniciar el UCDORM para continuar con la recepción de datos. Si UCDORM permanece en uno, solamente los caracteres dirección serán recibidos.
Cuando UCDORM es limpiado durante la recepción de un carácter la bandera de interrupción del receptor será puesto en una después de que la recepción sea completada. El bit UCDORM no es modificado por el hardware USCI automáticamente.
Para la transmisión de dirección en un formato multiprocesador idle-line, un periodo desocupado preciso puede ser generado por la USCI para generar identificadores de carácter dirección en UCAxTXD. La bandera double-buffered UCTXADDR indica si el siguiente carácter cargado en UCAxTXBUF es precedido por una línea desocupada de 11 bits. UCTXADDR es automáticamente limpiado cuando el bit de inicio es generado.
Formato Multiprocesador Bit-Dirección
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 53 El bit UCDORM es usado para controlar la recepción de datos en un formato multiprocesador de bit-dirección. Cuando UCDORM es puesto en uno, carácter datos con bit dirección=0 son ensamblados por el receptor pero no son transferidos a UCAxRXBUF y no se generan interrupciones. Cuando un carácter contiene un bit dirección puesto en un es recibido, el carácter es transferido a UCAxRXBUF, UCAxRXIFG es puesto en uno, y cualquier bandera de error aplicable es puesta a uno cuando UCRXEIE = 1. Cuando UCRXEIE = 0 y cuando un carácter que contiene un bit dirección puesto en uno es recibido, pero tiene un error de tramado o un error de paridad, el carácter no es transferido a UCAxRXBUF y UCAxRXIFG no es puesto en uno.
Si una dirección es recibida, el software de usuario puede validar la dirección y debe reiniciar UCDORM para continuar recibiendo datos. Si UCDORM permanece en uno, solamente los carácter dirección con bit dirección=1 serán recibidos. El bit UCDORM no es modificado por el hardware USCI automáticamente. Cuando UCDORM = 0 todos los carácter recibidos pondrán en uno la bandera de interrupción del receptor UCAxRXIFG. Si UCDORM es limpiado durante la recepción de un carácter la vadera de interrupción del receptor será puesto en uno cuando la recepción sea completada. Para la transmisión de dirección en modo multiprocesador bit-dirección, el bit dirección de un carácter es controlado por el bit UCTXADDR.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 54
2.5 Código detector de errores
Cuando se procesa, se memoriza, y especialmente se transmite información numérica o alfanumérica, es posible que se produzcan errores debidos a la presencia de ruido en el proceso o por avería de alguno de los componentes.
Cuando en un código binario se utilizan todas las combinaciones posibles de sus n-bits, es imposible la detección de un error, porque una combinación del código se transforma en otra que también pertenece a él. Por consiguiente, para que sea posible la detección de errores en un código binario es necesario que no se utilicen todas las combinaciones posibles. Pero esta condición, aunque es necesaria, no es suficiente para que el código permita detectar errores.
Para establecer la condición necesaria y suficiente para que un código binario permita detectar errores es necesario definir el concepto de distancia mínima de un código. La distancia entre dos combinaciones binarias viene dada por el número de bits de una de ellas que deben ser modificadas para obtener la otra. En un código se define la distancia mínima como la menor de las distancias entre dos combinaciones binarias cualesquiera pertenecientes al mismo. De todo lo dicho se deduce que, para que un código pueda detectar errores, su distancia mínima ha de ser superior a la unidad.
Existen diversos tipos de códigos detectores de errores, entre los cuales se encuentran los códigos de paridad y los códigos de peso constante (entendido por peso de una combinación binaria el número de unos lógicos de la misma).
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 55 La detección de errores en estos códigos consiste en comprobar si el numero de unos de cada combinación es par (códigos de paridad par) o impar (códigos de paridad impar).
En la tabla 2.5 se presenta el código decimal codificado en binario exceso tres con bit de paridad impar.
Digito Decimal Bit de paridad
impar
0 0 0 1 1 1
1 0 1 0 0 0
2 0 1 0 1 1
3 0 1 1 0 1
4 0 1 1 1 0
5 1 0 0 0 0
6 1 0 0 1 1
7 1 0 1 0 1
8 1 0 1 1 0
9 1 1 0 0 1
Tabla 2.5: código decimal codificado en binario exceso tres con bit de paridad impar.
Entre los códigos de peso fijo se encuentran el 2 entre el 5 y el biquinario.
Los códigos estudiados son de distancia mínima dos y permiten, pues, la detección de errores de un bit. Para poder detectar errores de más de un bit es necesaria la utilización de un código de distancia mínima superior a dos. En general el número de bits erróneos que se pueden detectar es igual al número en que la distancia mínima es superior a la unidad.
Los códigos corrección de errores no solo indican la existencia de un error, sino que proporcionan información de cuál es la cifra o cifras binarias erróneas y por consiguiente permiten su corrección invirtiendo simplemente el bit correspondiente.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 56 Para poder corregir errores, la distancia mínima del código ha de ser superior a dos. Si la distancia mínima de un código es tres, la combinación obtenida por error en un bit es adyacente a una sola combinación del código y es posible conocer cuál es el bit erróneo. Así, un código de distancia mínima tres permite detectar errores de 2 bits o corregir errores de un bit. En general, la distancia mínima de un código para que permita corregir errores de n bits ha de ser .
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 57
Capitulo 3
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 58
3.1 El Estándar Inalámbrico ZigBee
Las tecnologías inalámbricas han adoptado con el paso del tiempo una manera más sencilla y cómoda de utilizar toda clase de dispositivos con el fin de mejorar el confort y las comunicaciones en general.
ZigBee es el nombre de la especificación de un conjunto de protocolos de alto nivel de comunicación inalámbrica para su utilización con radios digitales de bajo consumo, basada en el estándar IEEE 802.15.4 de redes inalámbricas de área personal (wireless personal area network, WPAN). La primera versión de ZigBee (también llamado ZigBee 2004) se publicó en Diciembre de 2004, la versión más actual es la versión 2007, la cual incluye dos stacks ”NIVELES” (ZigBee y ZigBee
Pro).
Su objetivo son las aplicaciones para redes Wireless que requieran comunicaciones seguras y fiables con baja tasa de envío de datos y maximización de la vida útil de sus baterías. ZigBee comunica una serie de dispositivos haciendo que trabajen más eficiente entre sí.
[image:59.612.206.405.569.650.2]Es un transmisor y un receptor que usa baja potencia para trabajar. Es ideal para conexiones con diversos tipos de topología, lo que a su vez lo hace más seguro, barato y que no haya ninguna dificultad a la hora de su construcción porque es muy sencilla.
Escuela Superior de Ingeniería Mecánica y Eléctrica
Página 59
3.1.1 Características
ZigBee, también conocido como "HomeRF Lite", es una tecnología inalámbrica con velocidades comprendidas entre 20 kB/s y 250 kB/s.
Los rangos de alcance son de 20 m a 75 m.
Opera en la banda libre de 2.4 Ghz para conexiones inalámbricas.
Una red ZigBee puede estar formada por hasta 255 nodos los cuales tienen la mayor parte del tiempo el transceiver ZigBee dormido con objeto de consumir menos que otras tecnologías inalámbricas.
Un sensor equipado con un transceiver ZigBee pueda ser alimentado con dos pilas AA durante al menos 6 meses y hasta 2 años.
Diferentes tipos de topologías como estrella, punto a punto, malla, árbol.
Acceso de canal mediante CSMA/CA (acceso múltiple por detección de portadora con evasión de colisiones).
Ventajas
Ideal para conexiones punto a punto y punto a multipunto
Óptimo para redes de baja tasa de transferencia de datos.
Alojamiento de 16 bits a 64 bits de dirección extendida.
Reduce tiempos de espera en el envío y recepción de paquetes.
Baja ciclo de trabajo - Proporciona larga duración de la batería.
Son más baratos y de construcción más sencilla.
Desventajas
La tasa de transferencia es muy baja.
Solo manipula textos pequeños comparados con otras tecnologías.
Zigbee trabaja de manera que no puede ser compatible con bluetooth en todos sus aspectos porque no llegan a tener las mismas tasas de transferencia, ni la misma capacidad de soporte para nodos.
![Figura 2.2: Puente H con transistores [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/4949793.74691/19.612.198.418.140.341/figura-puente-h-con-transistores.webp)
![Figura 2.10: Trama de ZigBee [9]](https://thumb-us.123doks.com/thumbv2/123dok_es/4949793.74691/29.612.89.552.150.353/figura-trama-de-zigbee.webp)



![Figura 3.1: Icono de la ZigBee Alliance [15]](https://thumb-us.123doks.com/thumbv2/123dok_es/4949793.74691/59.612.206.405.569.650/figura-icono-de-zigbee-alliance.webp)



