SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
DISEÑO Y CONSTRUCCIÓN DE UN SENSOR
DE NIVEL UTILIZANDO FIBRAS ÓPTICAS
TESIS QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERÍA ELECTRÓNICA
OPCIÓN:
INSTRUMENTACIÓN
PRESENTA:
FREDDY LÓPEZ VILLAFUERTE
DIRECTOR DE TESIS
Dr. Walter Humberto Fonseca Araujo
DEDICATORIAS
A mis padres Luis López Moreno y Evelia López Villafuerte a quienes
amo mucho.
Les dedico este trabajo por las multiples atenciones y sacrificios que
realizaron para que lograra culminar mis estudios y por haberme
guiado en el camino del bien.
AGRADECIMIENTOS
Agradezco todas las atenciones recibidas, la paciencia y tolerancia del
director de esta Tesis, el Dr. Walter Humberto Fonseca Araujo.
Gracias por su amistad y su confianza, le reitero mi admiración y
profundo respeto.
Al Dr. Argeo Vázquez Martínez quien sin su apoyo no hubiera sido
posible la culminación de este trabajo. Gracias por tu amistad y por el
tiempo invertido.
A mis profesores de la maestría y comisión revisora:
Dr. José Manuel de la Rosa Vázquez
Dr. Roberto Linares y Miranda
Dr. Alexandre Michtchenko
M. en C. José Héctor Caltenco Franca
M. en C. Raúl Peña Rivero
M. en C. Artemio Ramírez Antonio
Gracias por su tiempo, consejos y enseñanzas.
A mis compañeros de maestría que enriquecieron mi vida:
Miguel Ángel Rodríguez Zuno
Onofre Alonso Lárraga
ABSTRACT
This Work presents the design and construction of a level sensor
with optical fibers. This level sensor is classified as a transmissive,
extrinsic and digitally intensity-modulated sensor, it uses the floating
force and binary code metallic plate to measure in litres the level of a
fluid in a liquid container.
The sensor described in this work measures the level of the
fluids independently from the physical and/or chemical characteristics
of the fluid such as viscosity, density, transparency, etc.
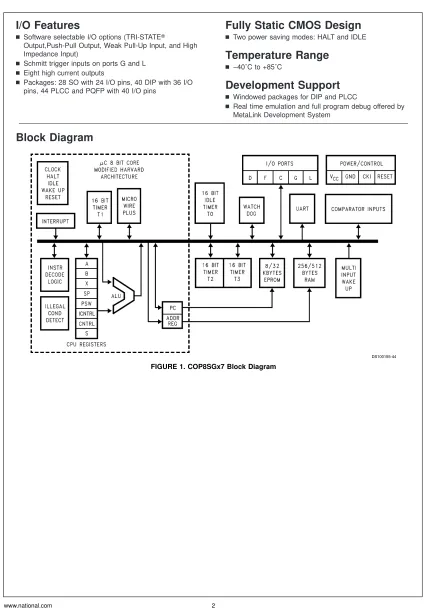
The fiber optics light signal is processed by the COP8SGR
microcontroller. This electronic device interprets the signal received
and it shows the level of the fluid on a Liquid Crystal Display AND491.
RESUMEN
En este trabajo se expone el diseño y la construcción de un
sensor de nivel de líquidos con fibras ópticas. Este sensor de nivel es
de tipo transmisivo, extrínseco y de amplitud modulada digitalmente;
utiliza el principio de flotación para determinar el nivel de un líquido en
un contenedor.
Este sensor puede realizar mediciones independientemente de
las características físicas o químicas del fluido en el contenedor, tales
como la viscosidad, densidad, transparencia, etc.
El procesamiento de la señal lumínica entregada por las fibras
ópticas se realiza con el microcontrolador COP8SGR, el cual interpreta
la señal recibida y muestra el nivel del liquido del contenedor por
medio del exhibidor de cristal líquido AND491.
GLOSARIO DE TÉRMINOS
Arquitectura
Harvard
Modificada:
Construcción lógica interna del microcontrolador
COP8 en donde la memoria de programa y la
memoria de datos tienen su propio bus de datos
y direcciones respectivamente.
Calibración:
El proceso de ajuste en la respuesta de un
instrumento sobre un intervalo lineal de
operación.
Código binario:
Representación discreta de dígitos binarios
(discretización con los dígitos uno y cero).
Densidad:
Masa por unidad de volumen de una
sustancia(Kg/m
3
).
Exactitud:
Relación entre el valor más cercano de una
lectura en un dispositivo de medición y el valor
real de la cantidad medida. Usualmente
expresada en
±
el por ciento de la escala
completa de salida o de lectura.
Extrínseco:
Que viene de afuera, que se realiza de forma
externa.
Intervalo de
operación:
Esta definido por los limites máximo y mínimo
que puede tomar el instrumento, bajo
condiciones controladas.
Linealidad:
La linealidad del instrumento se define como el
intervalo sobre el cual la variable tiene un
comportamiento repetitivo y donde el efecto es
proporcional a la causa.
Modulación:
Cambio de amplitud o de frecuencia de una
señal portadora.
Régimen
turbulento:
Cuando en un fluido las fuerzas de inercia son
mucho más significativas que las fuerzas
viscosas.
Ruido:
Cualquier perturbación que atenúa o interfiere a
la señal deseada.
Sensibilidad:
Cualidad de un instrumento o dispositivo para
mostrar su rapidez de respuesta (en el tiempo
y/o magnitud) a un estimulo específico.
Sistema digital:
Circuitos electrónicos en los cuales la
información es transmitida en forma de trenes
de pulsos (información discreta).
Viscosidad:
La resistencia inherente de una sustancia a fluir.
SENSOR DE NIVEL DE LÍQUIDOS UTILIZANDO
FIBRAS ÓPTICAS
Contenido:
Índice...
I
Índice de figuras... ...
III
Índice de tablas...
IV
Índice de fotografías...
V
Índice de programas en ensamblador...
V
Glosario...
VI
Abstract...
IX
Resumen...
X
Justificación y objetivo...
XI
Introducción...
XII
Antecedentes...
XIII
Capitulo 1. Sistemas de medición de nivel
1
1.1
Introducción.
2
1.2 Características de las fibras ópticas en los sensores.
2
1.3 Sensores de nivel con fibras ópticas.
3
1.3.1
Concepto
transmisivo.
4
1.3.2
Concepto
reflectivo.
4
1.3.3 Clasificación.
5
1.4
Sensores
de
nivel
transmisivo.
6
1.4.1
Nivel
de
líquidos
bicolor.
6
1.4.2
Sensor
de
nivel
por
obstrucción.
7
1.5 Sensor de nivel por fuerza de flotación.
8
1.5.1
Sensor
de
pistón
desplazable 8
1.5.2 Sensor de nivel lector de tarjeta.
9
1.6
Sensores
de
nivel
por
presión.
9
1.7
Sensor
de
superficie
reflejante.
10
Capitulo 2. Medición de nivel por lectura de código
13
2.1 Características generales del sensor.
14
2.2
Principio
de
operación
. 15
2.3 Condiciones para realizar la medición de nivel bajo el
principio
seleccionado. 18
Capitulo 3. Diseño y construcción del sensor
de nivel
21
3.1
Introducción.
22
3.2
Elemento
sensor. 22
3.3
Sistema
hidráulico.
24
3.4
Sistema
óptico
del
sensor.
26
3.4.1
Fibra
óptica. 27
3.4.2 Caracterización de las fibras ópticas de vidrio.
29
3.4.3
Fuente
óptica.
32
3.4.4
Receptor
óptico.
37
Capitulo 4. Procesamiento de la señal eléctrica e
interfase
periférica
47
4.1
Introducción.
48
4.2
Procesador
de
señal.
48
4.3
Periférico
de
salida.
51
4.4
Interfase
periférica.
51
4.5 Programación del microcontrolador COP8SGR7
52
Capitulo 5. Caracterización del sistema y análisis de
pérdidas
55
5.1
Introducción.
56
5.2
Sistema
general
de
medición. 56
5.3 Elementos principales que conforman al sistema.
57
5.4
Evaluación
del
sistema. 58
5.4.1
Desalineación
lateral.
60
5.4.3
Separación
entre
terminales. 63
5.4.4
Terminales
mal
pulidas. 69
5.5
Tolerancia
en
la
lectura
del
nivel.
69
5.6 Calibración en el sistema de medición.
70
Conclusiones.
71
Recomendaciones
y
sugerencias
72
Bibliografía.
73
Anexo A
Diagramas del sistema
76
Anexo B
Especificaciones eléctricas de dispositivos electrónicos
79
Anexo C
Programas en lenguaje ensamblador
COP8SGR7
99
Anexo D
Fotografías del sistema
113
Índice de figuras
1.1 Configuración de sensor reflectivo
5
1.2
Nivel
de
líquido
bicolor
6
1.3 Bosquejo de un sensor de nivel por obstrucción
7
1.4 Interruptor de nivel
de
líquidos 8
1.5 Sensor de nivel de líquidos con fibra óptica (digital)
9
1.6 Sensor de nivel de líquidos con transductor de presión
10
1.7 Medición de nivel de líquido por superficie reflejante
11
1.8 Sensor de nivel de líquidos con cambio de índice
refracción (Refracciométricos)
12
2.1 Bosquejo del código binario en la placa perforada
16
3.1 Bosquejo de la placa ranurada y acanalada
24
3.2 Sistema hidráulico
25
3.3 Elementos generales de un sistema de medición óptico 26
3.4 Partes que integran a una fibra óptica
27
3.5 Cono de aceptación de la fibra óptica dependiente de
3.7 Fuente óptica con LED emisor de 850 nm
34
3.8 Circuito para caracterizar a los diodos del emisor
35
3.9 Diagrama del circuito eléctrico del receptor óptico
39
3.10 Curvas características Corriente vs. Voltaje y línea de carga 40
3.11 Circuito equivalente del fotodiodo PIN
41
3.12 Curvas características capacitancia C
J
vs. Voltaje inverso 42
3.13 Curvas características Corriente obscuridad vs. Voltaje
Inverso
43
3.14 Circuito equivalente del diodo PIN y una etapa de
amplificación con sus respectivas fuentes de ruido
43
4.1 Diagrama del circuito integrado COP8SGR7
48
4.2 Diagrama eléctrico de la interfase periférica
52
4.3 Diagrama de flujo del programa principal
53
5.1 Diagrama a bloques del sistema general de medición
56
5.2 Pérdidas de potencia óptica
59
5.3 Desalineamiento entre dos fibras ópticas del mismo radio 60
5.4 Desalineamiento angular entre dos fibras ópticas
62
5.5 Separación existente entre dos fibras ópticas
63
5.6 Eficiencia de acoplamiento
64
5.7 Análisis del ángulo incidente de un haz de luz
66
5.8 Fuente óptica de potencia variable
68
5.9 Bosquejo del código binario en la placa perforada
70
Índice de tablas
Tabla 3.1 Mediciones de la NA para la fibra óptica de 100/140 31
Tabla 3.2 Mediciones de la NA para la fibra óptica de 50/125 31
Tabla 3.3 Mediciones de corriente de LED vs Voltaje de
referencia
35
Tabla 3.4 Mediciones de la potencia óptica de LED vs corriente
del LED
36
Tabla 5.1 Pérdidas por desalineamiento lateral
61
Tabla 5.2 Pérdidas por desalineamiento angular
63
Índice de fotografías
Fotografía 1 Sistema completo del sensor de nivel con
fibras ópticas
114
Fotografía 2 Vista en planta del receptor óptico y del
exhibidor AND491
115
Fotografía 3 Vista en planta del contenedor con el sensor
de nivel
116
Fotografía 4 Circuito electrónico del emisor óptico
117
Fotografía 5 Circuito electrónico de la interfase y el receptor
óptico
118
Fotografía 6 Detalle de la placa perforada con el código binario 119
Índice de programas en ensamblador
Programa principal del sensor de nivel
100
Programa de la macro “display” para controlar el
JUSTIFICACIÓN
El diseño y construcción de un sensor de nivel donde se
emplean los sistemas ópticos en conjunto con la electrónica
programable da origen a un sistema robusto y práctico para una
amplia variedad de aplicaciones en la industria, en donde se puede
llevar a cabo el control de la variable independientemente de las
características físicas y químicas de las sustancias que se manejen.
Este sensor presenta ventajas en ambientes agresivos y
contaminados, tales como los altos índices de interferencia
electromagnética y de radiofrecuencia, siendo el sensor inmune a
estos ambientes que dificultan la medición que con sistemas
eléctricos convencionales, no sería posible implementar.
OBJETIVO
Diseño y desarrollo de un sensor de nivel utilizando fibras ópticas
bajo el principio de flotación y lectura de una tarjeta perforada.
En el trabajo se contemplan las siguientes metas:
a) Análisis de los métodos de medición de nivel con fibras ópticas
existentes.
b) Selección del sistema de medición.
c) Selección de materiales para la construcción del sensor.
d) Diseño y construcción del sistema opto-mecánico.
INTRODUCCIÓN
Todos los sistemas de medición electrónicos consisten de tres
partes: una entrada derivada de un sensor, un dispositivo electrónico
que realiza el procesamiento de la señal de entrada, probablemente
en paralelo con las entradas de otras fuentes, y finalmente un
dispositivo de salida, típicamente un actuador.
Quizá uno de los retos de la tecnología de los sensores es la
conversión de energía de un tipo a otro para medir un determinado
parámetro que representa un fenómeno físico o químico por medio de
un transductor; lo cual alude a un arte multidisciplinario, ya que en los
sensores están incluidas varias ramas de la ciencia como la
electrónica, la ingeniería mecánica, química, física, etc
.
La función esencial de un sensor es detectar una variación de
energía para procesarla y transformarla a un valor correspondiente en
otra forma de energía, empleando en este proceso un transductor. Por
ejemplo, los cambios en la presión acústica producen cambios en la
corriente eléctrica de un micrófono, cambios en la temperatura
produce cambios en el voltaje eléctrico de un termopar, y los cambios
en las características espaciales de una escena representan cambios
en la corriente eléctrica de una cámara de televisión.
En este trabajo se presenta un sensor de nivel, que muestra en
un exhibidor, el nivel de un líquido cualquiera, que se encuentre en un
contenedor determinado, por lo que la variable del nivel del líquido en
el contenedor será transformado a información visual en el exhibidor.
ANTECEDENTES
Debido a que la medición del nivel de líquidos es un parámetro
importante para el control de procesos, en la industria, se han
implementado diferentes instrumentos para la medición de esta
variable.
Utilizando principios mecánicos, eléctricos o la combinación de
estos se han desarrollado sensores que monitorean el nivel de ciertos
líquidos contenidos en un recipiente. Las condiciones en las que se
encuentren estos líquidos y las características físicas y/o químicas del
mismo, determinaran que elemento sensor es apropiado para la
medición de esta variable.
En este trabajo se presenta el desarrollo de un instrumento para
medir el nivel de un líquido en un contenedor, independientemente de
las características fisico-químicas del mismo.
Se construirá un sensor óptico que permita la medición del nivel
del líquido en el contenedor, así como el receptor y emisor óptico del
sistema.
Se implementará en el sistema un procesador (microcontrolador)
que permita visualizar el estado actual del nivel del líquido en el
contenedor así como el hardware respectivo para el correcto
funcionamiento del mismo.
CAPÍTULO 1
1.1 INTRODUCCIÓN
La medición del nivel de un líquido es una parte integral de los
parámetros de un proceso de control, que se usa en una amplia
variedad de industrias.
La utilización de las fibras ópticas ha revolucionado el campo de
los sensores y representan un avance para la medición de distintas
variables utilizadas en un proceso, así como en muchas áreas de la
instrumentación han marcado un claro adelanto tecnológico como
principio para la medición del nivel tal como a continuación se expone.
1.2 CARACTERÍSTICAS DE LAS FIBRAS ÓPTICAS
EN LOS SENSORES
Los sensores con fibras ópticas son esencialmente un medio
donde la luz es guiada dentro de una fibra óptica y puede ser
modificada debido a una influencia física, química, biológica, etc.
La luz de una fuente óptica con intensidad constante se
introduce en una fibra óptica por medio de un acoplador y es guiada
hasta un punto donde la medición se lleva a cabo.
En este punto la luz puede salir de la fibra y ser modulada en
alguna zona fuera de ella antes de ser nuevamente introducida en la
misma fibra o alguna otra diferente (estos sensores son llamados
sensores extrínsecos) o la luz puede continuar dentro de la fibra y ser
modulada dentro de la misma (sensores intrínsecos) o una
combinación de las anteriores (sensores evanescentes) [5].
Los sensores con fibras ópticas representan un recurso
tecnológico que se aplica en una gran variedad de instrumentos.
Algunas de las características que hacen atractiva la utilización de las
fibras ópticas como sensores son las siguientes:
•
Carácter no-eléctrico.
•
A menudo no requiere contacto directo con la variable a
medir.
•
Capacidad de operación remota.
•
Dimensiones pequeñas y de poco peso.
•
Opera en áreas de acceso difícil.
•
Instalación potencialmente sencilla.
•
Inmune a interferencias de radio frecuencias (RFI) y a la
interferencia electromagnética (EMI).
•
Alta precisión en las mediciones.
•
Capacidad de acoplamiento con sistemas de comunicación de
datos.
•
Transmisión de datos segura.
•
Potencialmente resistente a la radiación ionizante.
•
Reducción de costos de protección contra ruido.
•
Menor mantenimiento.
•
Reducción de los costos de instalación y reparación.
1.3 SENSORES DE NIVEL CON FIBRAS ÓPTICAS
Todos los sensores de fibras ópticas pueden detectar la variable
física por medio de la modulación de intensidad óptica o por la
modulación de la fase del haz de luz. Los sensores de nivel
regularmente operan con intensidad modulada.
Los sensores de intensidad modulada están asociados
generalmente con el desplazamiento o alguna otra perturbación física
que interactúa con la fibra o un transductor mecánico aunado a la
fibra. La perturbación causa un cambio en la intensidad de la luz
recibida, la cual es función del fenómeno que se está midiendo.
Los conceptos generales asociados con la modulación de
intensidad incluyen al concepto transmisivo y reflectivo, sin embargo,
se usan otros mecanismos independiente de o en conjunto con los dos
conceptos anteriores, tales como: la absorción, los cambios de
densidad, fluorescencia, polarización y rejillas ópticas.
1.3.1 CONCEPTO TRANSMISIVO
El concepto de sensor transmisivo normalmente se asocia con la
interrupción de un rayo de luz. Por ejemplo si se quiere sensar el
desplazamiento axial entre dos fibras ópticas se observará que el
acoplamiento de luz sigue la ley de 1/r
2
donde r es la distancia entre
las sondas.
Otro sensor transmisivo más sensible es el de desplazamiento
radial donde el sensor no transmite si las sondas se desplazan una
distancia igual un diámetro de la sonda, aproximadamente el primer
20% del desplazamiento da una respuesta lineal en la luz acoplada.
1.3.2 CONCEPTO REFLECTIVO
El concepto reflectivo es atractivo para mucho sensores debido a
su precisión, simplicidad y su bajo costo. El sensor está compuesto de
dos fibras ópticas (ya sean de núcleos múltiples o de un solo núcleo),
por una de ellas se transmite luz a una tarjeta reflejante, mientras la
otra atrapará la luz reflejada y la transmitirá al detector, la intensidad
de la luz detectada depende de la distancia a la que se encuentre la
tarjeta reflejante.
Al graficar la intensidad de la luz reflejada contra la distancia a la
que se encuentra la superficie reflejante muestra que las pendientes
iniciales de la curva permiten tener una precisión potencial de
millonésimas de pulgada. La precisión también depende del tipo de
sonda que se utilice, ya sea hemisférica, coaxial, de par de núcleos o
sencilla.
Figura 1.1 Configuración de sensor reflectivo.
1.3.3 CLASIFICACIÓN
Los sensores de nivel pueden dividirse en dos categorías[5]:
Sensores de nivel puntual:
Este tipo de sensores se utilizan para marcar un nivel discreto
previamente establecido, regularmente funcionan como interruptores
de nivel alto y/o nivel bajo; se emplean como alarmas para la
condición de sobreflujo o para marcar el estado de nivel bajo o vacío.
Sensores de nivel continuo:
Este tipo de sensores proveen un monitoreo completo del nivel
del sistema, ya que como su nombre lo indica mide el nivel del fluido
en un intervalo determinado. Con ellos se pueden detectar fugas o
medir la magnitud actual del nivel del líquido en cuestión.
Los sensores de nivel continuo tienen una salida analógica que
correlaciona directamente el nivel de esta señal con el fluido del
contenedor.
1.4 SENSORES DE NIVEL TRANSMISIVO
1.4.1 NIVEL DE LÍQUIDOS BICOLOR
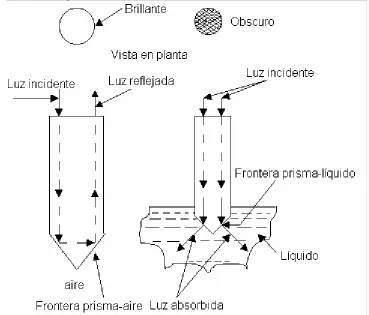
Las calderas generalmente usan cristales de dos colores para
detectar el nivel del agua. Se coloca un prisma de tal forma que si en
el compartimento se encuentra vapor, se observa una luz roja; pero si
el compartimiento se encuentra lleno de agua, la luz roja se refracta y
solo la luz verde se transmite.
[image:23.612.141.473.325.533.2]La interfase entre las fibras y el compartimiento de color debe de
estar aislada de la luz ambiental para evitar interferencias del medio
externo. Este tipo de sensor es pasivo, sin sistemas mecánicos en
movimiento u otros componentes eléctricos (mas que el iluminador ).
Figura 1.2 Nivel de líquido bicolor.
1.4.2 SENSOR DE NIVEL POR OBSTRUCCIÓN
Otro sistema transmisivo con fibras ópticas es como el que se
muestra en la figura 1.3, en ella se puede apreciar que con el líquido
del contenedor, la luz se ve interrumpida en su trayectoria hacia la
fibra receptora, de tal forma que al obstruirse el haz, se tiene la
información del nivel en el tanque.
El número de fibras ópticas utilizadas es igual al número de
niveles discretos que se requieran en el contenedor; cabe aclarar que
este tipo de sensor necesita protecciones para la fibra óptica en la
discontinuidad para que no se encuentren en contacto directo con el
líquido.
Una desventaja de este tipo de sensores es que no puede
detectar líquidos que sean transparentes a la longitud de onda de luz
empleada.
1.5 SENSOR DE NIVEL POR FUERZA DE
FLOTACIÓN
Este tipo de sensores detectan el nivel de líquidos empleando
flotadores, por medio de ellos y aprovechando la fuerza de flotación es
posible seguir el nivel del líquido.
1.5.1 SENSOR DE PISTÓN DESPLAZABLE
Este tipo de sensor utiliza un émbolo que es impulsado por un
flotador para detectar un nivel alto o bajo en el tanque, tal como lo
muestra la figura 1.4.
Se puede apreciar que el sensor puede ser de tipo transmisivo o
reflectivo dependiendo si el sensor, por medio del pistón, interrumpe el
haz de luz o lo refleja.
1.5.2 SENSOR DE NIVEL LECTOR DE TARJETA
Este sensor de nivel utiliza una tarjeta que contiene un código
binario (el código puede estar impreso con superficies reflejantes o
perforado en la misma placa), por lo que con el uso de n fibras se
pueden determinar valores discretos de nivel de líquido
.
Figura 1.5 Sensor de nivel de líquidos con fibra óptica (digital).
1.6 SENSORES DE NIVEL POR PRESION (CABEZA
HIDROSTÁTICA)
El nivel de líquidos puede determinarse midiendo la presión
ejercida sobre una membrana debido al peso de la columna de líquido
que ésta ejerce sobre de ella.
presión ejercida por una columna de agua; la diferencia de estas
presiones corresponde al nivel de líquidos.
El inconveniente es que este método al tener pequeños errores
en la medición de presión se tendrán errores grandes en el nivel de
líquidos.
Figura 1.6 Sensor de nivel de líquidos con transductor de presión.
1.7 SENSOR DE SUPERFICIE REFLEJANTE.
[image:28.612.93.520.69.353.2]
(29)Figura 1.7 Medición de nivel de líquido por superficie reflejante.
Para un intervalo dinámico muy grande (resolución del nivel del
líquido) puede parecer muy costoso pero es atractivo para sustancias
corrosivas o líquidos a alta temperatura donde el contacto no es
posible.
1.8 SENSORES DE NIVEL POR CAMBIOS DE
ÍNDICE DE REFRACCIÓN
Los sensores de nivel con cambios en el índice de refracción
funcionan al transmitir un haz de luz en un prisma, típicamente un
cuarzo (índice de refracción de 1.46).
refracción a su alrededor, hará que parte de la luz se refracte en el
líquido.
[image:29.612.119.488.151.466.2]Estos sensores son ideales para monitorear nivel alto o bajo, o
para detectar fugas en un sistema.
Figura 1.8 Sensor de nivel de líquidos con cambio de índice de refracción
(Refractométricos).
Algunos sensores con fibras ópticas presentados en este
capitulo dependen de las cualidades físicas y/o químicas del líquido
que se desee medir ( como el índice de refracción del líquido,
viscosidad, transparencia, corrosividad, etc.), otros más dependen de
las condiciones en que se encuentre el líquido o el contenedor (como
la presión interna del tanque, que el líquido se en cuentre en un
regimen no turbulento, etc.).
CAPÍTULO 2
2.1 CARACTERÍSTICAS GENERALES DEL SENSOR
El principio seleccionado para la medición del nivel fue el del
sensor de nivel con lector de tarjeta, el elemento principal para este
sensor es la tarjeta con código. El sistema fue diseñado para ser
modulado en intensidad (presencia o ausencia de luz) y de forma
transmisiva (extrínseca).
Una de las ventajas importantes de este medidor es la capacidad
de poder trabajar con una variedad de sustancias que puedan fluir en
el tanque. Dado que la medición se realiza en base a un principio de
flotación, se puede determinar el nivel de diversos líquidos sin importar
su densidad, transparencia, agresividad, etc.
El sensor presenta además la cualidad de operar en ambientes
contaminados electromagnéticamente.
Las ventajas y características que presenta este principio de
operación en el sensor son las siguientes:
•
Un número alto de discretización con un mínimo de fibras
ópticas.
•
Amplio intervalo de medición.
•
Versatilidad en la instalación.
•
Elemento sensor de tamaño reducido.
•
Amplia variedad para los materiales de construcción
(dependiendo del fluido a tratar).
•
Diversidad en la aplicación de procesos
•
Construcción simple y duradera.
•
Flexibilidad en la utilización de sistemas digitales para el
procesamiento de la señal y control de la variable.
•
Amplia variedad para la conexión de salida (interfaz de
computadora, exhibidores de led´s o de cristal líquido, etc).
•
El principio de operación por lectura de código permite
procesarse de modo enteramente digital.
•
El diseño del sensor es compacto, seguro y con posibilidades de
miniaturizarse por medio de elementos mecánicos.
•
La operación del sensor es intrínsecamente seguro en
ambientes inflamables y agresivos.
•
Facilidad de instalación en lugares poco accesibles
•
Utilización de fibras ópticas de plástico o de vidrio con diferentes
diámetros y núcleos.
•
Utilización de fuentes ópticas poco estabilizadas con niveles de
potencia ajustables a un valor fijo.
•
La fuente óptica no requiere compensación alguna.
•
El sistema de calibración es práctico y muy sencillo.
•
El sistema de modulación del haz de luz es sencillo (ausencia o
presencia del haz).
•
Sistema de procesamiento por microcontrolador COP8 con
capacidad de control de procesos.
2.2 PRINCIPIO DE OPERACIÓN
El elemento primario del sensor es la placa con código binario,
este código puede incorporarse al sensor en forma reflectiva o
transmisiva, dependiendo de si la tarjeta se construye con superficies
reflejantes o con perforaciones en la misma que permitan pasar la luz
hacia el sistema receptor.
Los niveles discretos (N) detectables en el contenedor con este
sistema están en función del número de bits utilizados en la placa
perforada, debido a que la placa tiene un código binario de 8 bits
entonces los niveles discretos son:
niveles
N
=
2
n=
2
8=
256
(1)
El número de fibras emisoras (n) o lectoras del sistema son 8 ya
que la placa perforada contiene un código binario de 8 bits.
Figura 2.1 Bosquejo del código binario en la placa perforada.
La lectura de cada combinación en la tarjeta se realiza por medio
de las fibras ópticas. El sistema dispone de 8 fibras ópticas emisoras
de luz y 8 fibras ópticas receptoras que se encuentran en la parte
superior del contenedor.
La placa perforada con el código binario se desplaza entre las
fibras ópticas emisoras y receptoras impulsada por el nivel del líquido
contenido en el tanque.
La placa perforada puede desplazarse entre las fibras ópticas
debido a que en la base de la misma se encuentran unos flotadores de
plástico que permiten impulsarla conforme el contenedor se llena o se
vacía de líquido.
La forma en que se lleva a cabo la lectura del código binario en
la tarjeta perforada por medio de las fibras ópticas es de carácter
transmisivo, es decir, las fibras ópticas emisoras transmiten haces de
luz hacia las fibras ópticas receptoras, mismas que logran acoplar la
potencia lumínica de las primeras dependiendo de la posición de la
tarjeta perforada .
Si una de las fibras ópticas emisoras coincide con un hueco de la
tarjeta perforada con el código binario, entonces la fibra óptica
receptora podrá acoplar esta radiación ya que la tarjeta permitirá un
paso libre y directo entre ambas fibras. Por el contrario, si no hay
ranura entre las fibras ópticas entonces la fibra óptica receptora no
recibe radiación lumínica, de modo que la ausencia o presencia de luz
en las fibras ópticas representan los dígitos binarios de la placa
perforada.
Como se tienen 8 fibras ópticas emisoras, entonces se podrá
obtener la lectura de un byte del código de la tarjeta perforada.
2.3 CONDICIONES PARA REALIZAR LA
MEDICIÓN DE NIVEL BAJO EL PRINCIPIO
SELECCIONADO
Como se ha mencionado, las características del líquido que se
somete a la medición con este prototipo pueden ser muy variadas. Los
fluidos en cuestión pueden tener un alto índice de viscosidad o pueden
ser fluidos muy delgados.
Debido a esta cualidad del sensor, los cambios en la densidad y
viscosidad de un fluido (que cambian principalmente por las
variaciones de temperatura y presión) no intervienen en la medición
del dispositivo, por lo que se hace inmune a los cambios de
temperatura y presión dentro del tanque.
La dilatación de ciertos líquidos pueden ser medidos por el
dispositivo, siempre y cuando el nivel de discretización del sensor lo
permita.
El sensor puede medir líquidos opacos así como fluidos no
homogéneos; los líquidos a medir pueden no estar limpios o pueden
ser una combinación de ellos, ya que el desplazamiento del líquido en
el tanque es lo primordial para este principio de operación.
Debido a que los flotadores que desplazan la placa perforada
con el código binario son el único elemento que se encuentra en
contacto directo con el fluido, es de especial cuidado elegir el material
de los mismos.
El material de los flotadores debe elegirse previamente para
soportar la agresividad del líquido (corrosión, densidad, temperatura
del líquido), así como las variaciones de temperatura y presión dentro
del contenedor, además debe asegurar su flotabilidad en el líquido.
En caso de trabajar con líquidos donde el ambiente sea de
régimen turbulento, se tendría que establecer factores de corrección
en el procesamiento de la señal para obtener una lectura promedio del
sistema.
Para este tipo de esquema turbulento, puede ser conveniente
implementar sistemas de rectificación mecánica para reducir las
variaciones del perfil del nivel y obtener de esta manera las
condiciones de velocidad apropiadas para el sistema.
Para realizar la medición de nivel de un líquido dentro del
contenedor se consideraron los siguientes elementos:
•
Una placa perforada con el código binario con las
dimensiones adecuadas para su correcto funcionamiento, a
fin de aplicar el principio de operación descrito
anteriormente.
•
Elementos que conforman el sistema óptico (emisor,
receptor, fibras ópticas, etc).
-
Diseño electrónico de una fuente óptica de potencia
fija ajustable.
-
Diseño electrónico de un receptor óptico adecuado
para tratamiento digital.
-
Elección de la fibra óptica para el sistema.
-
Desarrollo de un método de calibración para el
sistema.
•
Desarrollo del sistema electrónico para el procesamiento
de las señales entregadas por el sensor.
•
Sistema hidráulico de prueba utilizando ductos de plástico
(poliductos PVC o acrílico).
-
El líquido de control dentro del tanque es el agua
(Densidad = 1g/cm
3
, viscosidad absoluta = 1 cP).
- Diseño del sistema con tubos de PVC hidráulicos de
1”
∅
.
CAPÍTULO 3
3.1 INTRODUCCIÓN
La construcción de un sensor con las características descritas,
implica la correcta selección de los materiales a utilizar tanto para el
diseño opto-mecánico como para el elemento sensor. El diseño debe
considerar la sustancia con que se trabajará para reducir al mínimo el
mantenimiento del mismo.
3.2 ELEMENTO SENSOR
El elemento sensor del sistema está conformado por la placa
perforada y los flotadores que se encuentran en su base.
El código binario en la placa fue elegido para tener una conexión
semidirecta con la electrónica digital y de esta forma obtener el byte de
información correspondiente al nivel del líquido en el contenedor.
El material de la placa perforada debe cubrir los siguientes
requerimientos:
•
Debe soportar las condiciones ambientales dentro del
contenedor.
•
Debe construirse con materiales livianos que permitan la
flotabilidad de las boyas en su base.
•
El material debe ser rígido para obtener una buena lectura
del código.
Para el prototipo implementado en el laboratorio, se utilizó una
placa de duraluminio de 27.8 cm (10.94 pulgadas) de largo por 6 cm
(2.36 pulgadas) de ancho, el grosor de la placa es de 0.76 mm (30
milésimas de pulgada) ( véase el anexo A).
La placa con el código binario no debe interactuar químicamente
con el agua ni presentar oxidación a largo plazo. Otras alternativas
pueden ser placas de magnesio, titanio o algún plástico rígido como el
PVC.
Dado que el líquido elegido para las mediciones de prueba es el
agua, los flotadores utilizados para impulsar la placa perforada con el
código binario fueron 2 boyas hidráulicas de plástico de 3.5 pulgadas
de diámetro.
La placa impulsada por los flotadores se desplaza a través de las
fibras ópticas emisoras y receptoras por medio de unas flechas de
aluminio que guían la tarjeta perforada hacia una placa ranurada
(también de aluminio) donde descansan las fibras ópticas.
La placa ranurada de aluminio se encuentra en la parte superior
del contenedor. El propósito de esta placa ranurada es el de sostener
y alinear las fibras ópticas emisoras y receptoras.
La alineación de las fibras ópticas emisoras y receptoras es tanto
transversal como longitudinal.
La alineación longitudinal es necesaria para la lectura de la placa
perforada con el código binario, ya que en la placa perforada cada
código está dispuesto en forma horizontal y las 8 fibras ópticas deben
mantener la horizontalidad para la lectura correcta de la placa
perforada.
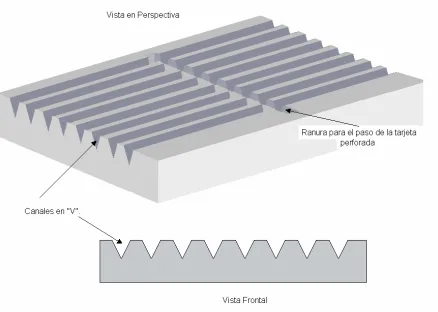
La alineación transversal se obtiene con el acanalamiento en “V”
de la placa ranurada, este acanalamiento recorre la placa ranurada de
un extremo a otro, tal como lo muestra la figura 3.1.
[image:41.612.121.559.103.415.2]
(42)Figura 3.1 Bosquejo de la placa ranurada y acanalada.
En la figura 3.1 Se puede apreciar el espacio existente entre fibra
óptica emisora y receptora, esta es la ranura en la placa de aluminio
por donde se desplaza la placa perforada con el código binario. En
este punto es donde se encuentra la mayor pérdida de potencia óptica
entre fibra óptica emisora y receptora. Para mayor detalle referirse al
anexo A.
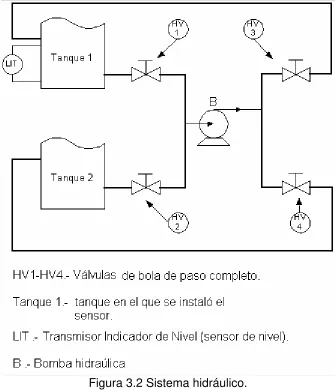
3.3 SISTEMA HIDRÁULICO.
El flujo del líquido es bidireccional, de tal forma que se puedan
hacer pruebas de llenado y vaciado en el tanque que tiene instalado el
sensor.
[image:42.612.138.473.231.623.2]El sistema hidráulico propuesto puede llenar o vaciar el tanque
con el sensor de nivel a través de un arreglo de tuberías en conjunto
con un juego de válvulas que pueden transportar el líquido de un
contenedor a otro y viceversa, tal como se observa en la figura 3.2.
Figura 3.2 Sistema hidráulico.
3.4 SISTEMA ÓPTICO DEL SENSOR
Todo sistema óptico está conformado por tres componentes
principales: un transmisor, un medio de transmisión óptica (fibras
ópticas), la cual sirve como vía o canal de comunicación y un
receptor[3].
La fibra óptica, que es un medio dieléctrico, permite guiar a
la luz misma que puede contener la información pertinente a la
variable física medida (en este caso el nivel de un líquido).
Figura 3.3 Elementos generales de un sistema de medición óptico.
Para cualquier sistema óptico de medición es necesario la
utilización de transductores, que pueden ser de conversión de señales
eléctricas (voltaje o corriente) a energía luminosa (transductores
emisores) o transductores que conviertan la energía luminosa a
señales eléctricas (transductores receptores).
3.4.1 FIBRA ÓPTICA
Las fibras ópticas son filamentos de vidrio o dióxido de silicio
largos y flexibles, constan de un núcleo transparente rodeado por un
material dieléctrico llamado revestimiento (aunque también existen
varios núcleos dentro de un mismo revestimiento) y un recubrimiento
que dota de protección al revestimiento[1].
El núcleo es la sección central principal por la que viaja la
información en forma de luz. El revestimiento es la capa que rodea al
núcleo, su objeto es actuar como pantalla reflejante que atrapa los
rayos de luz en el núcleo, su índice de refracción es ligeramente
menor al del núcleo.
Figura 3.4 Partes que integran a una fibra óptica.
La transmisión de información en las fibras ópticas se logra
aprovechando el fenómeno de la reflexión interna total dentro del
núcleo.
La selección de las fibras ópticas para el sensor de nivel está
limitada por los tipos de fibras ópticas existentes en el laboratorio de
electrónica. Las fibras ópticas disponibles en el laboratorio son:
-
Fibra óptica de plástico con un diámetro de núcleo de
1000
µ
m.
Para la elección de alguna de las fibras ópticas anteriores se
estudiaron sus características individuales, ventajas e inconvenientes
para implementar el sensor.
En primera instancia, se descartó la fibra óptica de plástico de
1000
µ
m de diámetro debido a que este tipo de fibra óptica tiene una
atenuación relativamente elevada a las longitudes de onda localizadas
en el infrarrojo, es por esta razón que las fibras ópticas de vidrio tienen
más uso, más variedad y una mayor gama de aplicaciones en el
mercado de las comunicaciones.
Aunque las fibras ópticas de plástico tienen un núcleo
considerablemente grande y por tanto puede acoplar más luz a la
misma, resulta inconveniente para el sensor de nivel, el que esta fibra
óptica esté diseñada para ser transparente a las longitudes de onda en
el espectro visible, lo cual puede provocar interferencia al sensor
debido a la luz ambiental.
La fibra óptica de plástico tiene atenuaciones de hasta más de
1000 dB/Km para longitudes de onda en el infrarrojo, por lo que no son
capaces de transmitir luz infrarroja a grandes distancias.
La luz que se propaga en un conductor de fibra óptica de vidrio
experimenta atenuaciones mayores en las longitudes de onda del
espectro visible, mientras que en la región del infrarrojo presenta
atenuaciones menores.
Para cubrir grandes distancias sin emplear regeneradores
intermedios, es necesario mantener estas pérdidas en el mínimo
posible, es por esto, que en este tipo de fibras ópticas conviene
emplear luz que se encuentre en longitudes de onda pertenecientes al
infrarrojo.
3.4.2 CARACTERIZACIÓN DE LAS FIBRAS
ÓPTICAS DE VIDRIO
Una característica importante de las fibras ópticas es su
habilidad de colectar luz emitida por una fuente. Cuando se acopla una
fuente óptica a una fibra óptica, se presentan dos mecanismos de
pérdidas, uno de ellos está relacionado al desacoplamiento de área y
el otro está relacionado con la apertura numérica.
El desacoplamiento de área se presenta cuando el patrón de
radiación de la fuente (cono de la emisión de luz) es más grande que
el área transversal del núcleo.
En ocasiones aunque el área iluminada por la fuente sea menor
que el área del núcleo, existe otra pérdida asociada con el cono de
aceptación de la fibra[4].
El ángulo de aceptación (
θ
a
) de luz de la fibra óptica está
relacionado con el ángulo crítico, dado que se pretende colectar la
mayor cantidad de luz al núcleo de una fibra óptica, entonces es
importante conocer este parámetro de las fibras ópticas conocido
como apertura numérica (figura 3.5).
Figura 3.5 Cono de aceptación de la fibra óptica dependiente de la apertura
numérica.
Para determinar el cono de apertura de las fibras ópticas de
[image:47.612.157.456.153.445.2]
(48)Se inyectó luz por un extremo de la fibra óptica sometida a
prueba, y en el otro extremo de la misma se midió la mota de luz
conducida por la fibra, observada en una pantalla blanca, tal como se
muestra en la figura 3.6.
Figura 3.6 Medición de la apertura numérica de la fibra óptica.
Se determinó la apertura numérica de la fibra óptica por medio
de la siguiente expresión[7]:
2 2
4
2
h
d
d
NA
sen
a+
=
=
θ
(2)
donde d= diámetro de la mota de luz en la pantalla blanca (mm).
h= distancia entre la fibra óptica y la pantalla blanca (mm).
NA= apertura numérica de la fibra óptica (adimensional).
θ
a
= ángulo de apertura (grados).
Para realizar la medición se montó la fibra de 100/140 frente a
una pantalla de papel blanco en donde se marcó la imagen del cono
de luz proyectado por la fibra. El proceso se realizó a diferentes
distancias, para tener más precisión en el cálculo.
La fuente óptica fue un apuntador láser comercial al cual se le
alteró su lente interna para enfocar el haz hacia la fibra óptica y de
esta manera inyectar mayor potencia lumínica a la fibra óptica.
Los resultados se presentan en las siguientes tablas:
Tabla 3.1 Mediciones de la NA para la fibra óptica de 100/140
µ
m
h(mm)
d(mm)
NA(adimensional)
8.43 5.33 0.301
2.59 1.98 0.35
2 1.16
0.27
1.28 0.79 0.29
Promedio 0.302
Tabla 3.2 Mediciones de la NA para la fibra óptica de 50/125
µ
m
h(mm) d(mm)
NA(adimensional)
8.43 3.81 0.22
2.6 1 0.192
2 0.81
0.199
1.28 0.6 0.232
Promedio 0.211
En las pruebas que se realizaron a las fibras ópticas de vidrio se
puede apreciar que la fibra óptica que tiene una apertura numérica
ligeramente mayor es la fibra óptica de 100/140
µ
m. , por lo que tiene
un cono de apertura mayor que la otra fibra óptica.
3.4.3 FUENTE ÓPTICA
Las fuentes ópticas pueden construirse a base de tres tipos
de emisores de luz: Diodos Láser (LD), Diodos Emisores de Luz (LED)
o Diodos Súper luminiscentes(SLD)[2].
Los diodos láser son fuentes de luz coherente, producto de la
emisión estimulada que tiene lugar en una cavidad resonante,
compuesta por una superficie reflejante y otra parcialmente reflejante,
en donde se da la retroalimentación óptica. Su ancho espectral es
menor a 5nm y tiene un patrón de radiación muy direccional, con lo
que se obtiene un acoplamiento de potencia óptica grande.
Los diodos emisores de luz son fuentes de luz incoherente
debido a que trabajan bajo el principio de emisión espontánea, su
fabricación es mucho más sencilla y robusta en comparación con los
LD´s, regularmente se modulan en amplitud ya que la potencia
luminosa del LED es proporcional a la corriente inyectada en éste; el
patrón de radiación de este dispositivo es omnidireccional por lo que el
acoplamiento con fibras ópticas es pobre.
Los diodos súper luminiscentes (SLD) son similares a los LD´s,
su diferencia principal es que en estos dispositivos no se tiene
retroalimentación óptica como en los LD´s. La radiación emitida por un
SLD es de emisión espontánea amplificada, aunque la emisión no es
coherente, su ancho espectral es más reducido que el de un LED,
pero más ancha que la de un LD y su patrón de intensidad radiante es
más reducido y potente que el de los LED´s.
Para seleccionar el tipo de fuente luminosa fue necesario tomar
en cuenta las ventajas y los inconvenientes de cada dispositivo, así
como los requerimientos del sistema mismo:
Los diodos súper luminiscentes son de alto costo y requieren de
una gran corriente de inyección para producir una ganancia sustancial.
Por tanto el dispositivo elegido fue el LED, que tiene mayor
estabilidad térmica, mayor tiempo de vida, es menos susceptible a
transitorios eléctricos y es económico.
Para los propósitos del sistema es suficiente la utilización de un
LED a pesar de su baja eficiencia de acoplamiento de luz a la fibra
óptica, ya que sólo se requiere de una fuente óptica relativamente
estable.
Las ventanas de operación de la fibra óptica de vidrio preferidas
para telecomunicaciones se encuentran en el espectro infrarrojo,
siendo 850, 1300 y 1550 nm las longitudes de onda más empleadas
para esa aplicación.
Debido a que se utilizó la fibra óptica multimodo de vidrio de
100/140
µ
m, se realizaron pruebas con diferentes LED´s que radian en
el espectro infrarrojo, siendo el LED OPF371 de OPTEK[11] el que
proporcionó el mayor acoplamiento de luz a la fibra óptica elegida.
El LED OPF371 tiene la ventaja de tener integrado al
semiconductor un receptáculo SMA. Este tipo de conectores son los
empleados por las fibras ópticas del sistema. Las hojas de
especificaciones técnicas del OPF371 se encuentran en el anexo B.
La configuración de la fuente óptica es un circuito electrónico de
control de corriente por medio de un transistor y una referencia de
voltaje, tal como se puede apreciar en la figura 3.7.
Figura 3.7 Fuente óptica con LED emisor de 850 nm.
El integrado LM399 mantiene un voltaje de 6.9 volts entre sus
terminales de cátodo y ánodo, de tal forma que el voltaje de referencia
se obtiene por medio del divisor de voltaje entre las resistencias de
1K
Ω
y 100K
Ω
tal como sigue:
Volts
Volts
V
REF6
.
832
1000
100000
100000
9
.
6
=
⎥⎦
⎤
⎢⎣
⎡
Ω
+
Ω
Ω
=
(3)
Se puede observar en el diagrama eléctrico que el voltaje de
referencia se ve reflejado en el emisor del transistor BD139, lo que
provoca una corriente de magnitud semejante en el colector del
mismo.
La corriente en el LED se calcula con la siguiente ecuación:
mA
ohms
Volts
R
V
I
I
E E CE
83
.
3
82
832
.
6
=
=
=
≅
(4)
La corriente en el LED se estableció de este valor para obtener
la máxima potencia lumínica del diodo pero sin llegar a su corriente
límite de operación, en las hojas de especificación del anexo B se
puede observar que la corriente límite de este LED es de 100 mA.
Figura 3.8 Circuito para caracterizar a los diodos del emisor.
Con el circuito de la figura 3.8 se caracterizaron los LED´s de
cada emisor óptico. Por medio de la resistencia variable de 100 K
Ω
, se
varió el voltaje de referencia de tal forma que se obtuvieron diferentes
corrientes en el OPF371, obteniéndose las siguientes mediciones:
Tabla 3.3 Mediciones de corriente de LED vs. Voltaje de referencia.
Voltaje de referencia V
REF
(Volts)
Corriente en el LED I
LED
(mA)
1.2 15
1.54 20
Cabe aclarar que para corrientes que son mayores a 80 mA, las
mediciones se realizaron sin el integrado LM399, esto fue con el fin de
caracterizar al diodo emisor en su máxima conducción de corriente.
Se caracterizó la salida óptica del LED OPF371 a partir de las
diferentes corrientes en el dispositivo. La medición de la potencia
óptica se realizó con el multímetro óptico Tektroniks Modelo TFC200,
obteniéndose las siguientes mediciones.
Corriente en el LED I
LED
(mA)
Potencia óptica P
O
(
µ
W)
15 26.6
20 38.9
25 48.1
30 59.3
35 61.4
40 80.1
45 87.9
50 99.2
55 106.8
60 113.5
65 123.6
70 132.7
75 139.3
80 146.7
85 153.9
90 160.2
95 165.4
100 171.3
Tabla 4. Mediciones de la potencia óptica de LED vs. corriente del
LED.
3.4.4 RECEPTOR ÓPTICO
El proceso de conversión de fotones a electrones libres
(portadores) es esencial para el sistema óptico. Esta conversión se
realiza por medio de fotodetectores que pueden clasificarse como[2]:
a) Elementos fotoemisivos.
b) Elementos fotoconductivos.
c) Elementos fotovoltaicos.
A los elementos fotoemisivos se les conoce también como
elementos de efecto fotoeléctrico externo, mientras que los dos
restantes se les llama elementos de efecto fotoeléctrico interno.
Los detectores fotoemisivos pueden ser los fotodiodos de vacío y
los tubos fotomultiplicadores. El componente principal para este tipo
de detectores es el material fotosensitivo en el cátodo.
En este tipo de detectores cuando el cátodo se ilumina por
radiación externa, se desprenden electrones del material sensitivo que
viajan por el tubo de vacío donde los electrones se aceleran y colectan
por el ánodo, formándose una trayectoria eléctrica completa que fluye
hacia un circuito externo. Dado que este tipo de elementos tienen un
costo elevado, son poco robustos y además requieren de fuentes de
alimentación de alto voltaje (150 – 2000V), se descartó la utilización de
los mismos.
La característica principal de los detectores fotovoltaicos es la
presencia de una unión de material semiconductor. La unión puede ser
una homounión, una heterounión, una unión semiconductor y metal
(como la barrera Schottky), una unión de contacto puntual o una
estructura PIN.
Existen básicamente dos tipos de semiconductores
fotodetectores empleados en los receptores ópticos de este tipo; el
primero es comúnmente referido como fotodetector PIN, éste genera
menos de un de electrón-hueco por fotón absorbido.
El segundo se refiere como fotodetector de avalancha debido al
proceso de ionización de impacto, este proceso produce una ganancia
interna, ya que genera más de un par electrón-hueco por fotón
absorbido; a esta ganancia se le conoce como ganancia de avalancha.
En algunas aplicaciones, donde se requiere alta sensibilidad, es
ventajoso diseñar los receptores con fotodetectores de avalancha; sin
embargo, el proceso de ganancia es estadístico, en donde cada par
electrón-hueco primario genera un número aleatorio M de pares
electrón-hueco secundarios, con un valor medio N.
Por lo aleatorio del proceso de multiplicación de ionización de
impacto se introduce ruido, que puede en algunas circunstancias ser
un factor dominante en la sensibilidad del receptor.
Por los argumentos anteriores, se prefirió el diodo PIN OPF471
para la construcción del receptor óptico, ya que además resulta
atractivo por las siguientes características:
1.- Alta sensibilidad a la longitud de onda de operación (850 nm).
2.- Contribución mínima al ruido total del receptor.
3.- Tiempo de respuesta mínimo a los cambios de potencia
lumínica.
6.- Baja corriente de obscuridad.
7.- Amplio intervalo de operación térmica.
En la figura 3.9 se muestra el diagrama eléctrico del receptor
óptico con el OPF471, en ella se puede apreciar que para polarizar al
diodo PIN (en forma inversa) se utilizó una resistencia de 10 K
Ω
.
Figura 3.9 Diagrama del circuito eléctrico del receptor óptico.
Las curvas características de un diodo PIN se muestran en la
figura 3.10, en ellas se puede observar que conforme incide más luz
en el diodo PIN OPF471, la curva característica del diodo PIN se
desplaza en el eje negativo de i
D
, por lo que la corriente inversa en el
Figura 3.10 Curvas características de corriente vs. Voltaje y línea de carga
El voltaje de polarización inversa se eligió de 5 volts, por lo que
los valores críticos para la recta de carga son:
V
D
⏐
i
D=0
= Vcc-I
D
R = 5 Volts. (5)
I
D
⏐
vD
=0
= (Vcc-V
D
)/R = 5 Volts/10 K
Ω
= 500
µ
A. (6)
El intervalo dinámico debido a la resistencia de 10K
Ω
, es
apropiado para el OPF471, dado que para una incidencia de 10
4
Lux
proporciona una corriente de corto circuito (Isc) de aproximadamente
500
µ
A.
Si se incrementara la resistencia de carga se obtendría un
intervalo dinámico de corriente más pequeño, con el riesgo de
incrementar el ruido en el sistema debido al ruido térmico que es
directamente proporcional a la magnitud del resistor de carga, como se
demuestra con la siguiente ecuación:
f
kTR
E
t=
4
∆
(7)
donde
E
t
= ruido rms térmico
Cabe aclarar que el incremento del voltaje inverso aplicado al
diodo PIN mejora la rapidez en la respuesta del mismo, ya que existe
una capacitancia de unión intrínseca entre las terminales del diodo PIN
(como se muestra en el circuito equivalente de la figura 3.11), lo que
provoca que se forme una constante de tiempo entre la carga y la
capacitancia de unión.
En la figura 3.12 se puede notar que conforme se incrementa el
voltaje inverso aplicado, la capacitancia de unión (C
J
) disminuye y por
tanto aumenta la rapidez de respuesta del diodo PIN.
Figura 3.11 Circuito equivalente del fotodiodo PIN.
El valor de C
J
es proporcional al área activa (A) e inversamente
proporcional a la resistivad del material del sustrato (
ρ
) y al voltaje
inverso aplicado (V
R
), tal como lo indica la siguiente expresión[13]:
[image:59.612.182.465.67.340.2]
(60)


![Figura 3.12 Curvas características capacitancia CJ vs voltaje inverso. Tomada de [14]](https://thumb-us.123doks.com/thumbv2/123dok_es/4969145.75610/59.612.182.465.67.340/figura-curvas-caracteristicas-capacitancia-cj-voltaje-inverso-tomada.webp)