INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
BALANCEO DE ENGRANES APLICADO A
UN MOTOR HÍBRIDO
T E S I S
QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCI AS CON ESPECIALIDAD I N G E N I E R Í A M E C Á N I C A
P R E S E N T A :
ING. CÉSAR P. MORA COVARRUBIAS
D I R E C T O R :
M. en C. RICARDO LÓPEZ MARTÍNEZ
ÍNDICE GENERAL
ÍNDICE GENERAL INDICE DE FIGURAS INDICE DE TABLAS GLOSARIO SIMBOLOGIA RESUMEN ABSTRACT OBJETIVO JUSTIFICACIÓN INTRODUCCIÓN
CAPÍTULO 1. GENERALIDADES
1.1 Antecedentes
1.2 Mecanismos, tipos de mecanismos, grados de libertad 1.2.1 Armadura o bancada
1.2.2 Eslabón
1.2.3 Cadena cinemática 1.2.4 Pares de elementos 1.2.5 Pares de deslizamiento 1.2.6 Pares en rodadura 1.2.7 Pares inferiores 1.2.8 Pares superiores 1.2.9 Tipos de eslabones
ESIME III 1.2.10 Movimiento
1.2.11 Movimiento limitado ríg ido 1.2.12 Movimiento semirígido 1.2.13 Inversión de un mecanismo
1.2.14 Clasificación de los movimientos
1.2.15 Determinación del movimiento de un cuerpo 1.3 Vibraciones mecánicas
1.3.1 Definición de vibración
1.3.2 Sistemas de un grado de libertad 1.3.3 Vibraciones sin amortiguamiento
1.4 Problemas típicos debidos a la vibración en engranes 1.5 Motores Híbridos (o motores ecológicos)
1.6 Planteamiento del problema 1.7 Sumario
1.8 Referencias
CAPÍTULO 2. ENGRANES
2.1 Generalidades
2.2 Variables utilizadas para engranes 2.3 Nomenclatura de los dientes de engranes 2.4 Teoría de los dientes de engrane
2.4.1 Ley fundamental de los engranes 2.4.2 La forma involuta en dientes 2.4.3 Angulo de presión
2.4.4 Geometría del acoplamiento 2.4.5 Piñón y cremallera
2.4.6 Modificación de la distancia entre centros 2.4.7 Huelgo o juego
2.4.8 Movimiento relativo de los dientes 2.5 Interferencia y rebaje
2.5.1 Formas de diente de desigual altura de cabeza 2.6 Razón de contacto
2.7 Engranes helicoidales 2.8 Fabricación de engranes
2.8.1 Conformación de dientes de engranes 2.8.2 Maquinado
2.8.3 Procesos de desbastado 2.8.4 Procesos de terminado 2.8.5 Calidad del engrane 2.9 Sumario
2.10 Referencias
CAPÍTULO 3. DESBALANCEO
3.1 Causas del desbalanceo
3.2 Balanceo de las máquinas rotatorias 3.3 Desbalanceo estático
3.3.1 Ecuación del movimiento
3.3.2 Método vectorial de balanceo en un solo plano 3.4 Desequilibrio dinámico
3.4.1 balanceo en dos planos
3.4.2 método vectorial de balanceo en dos planos 3.5 Sumario
3.6 Referencias
ESIME V CAPÍTULO 4. APLICACIÓN DEL BALANCEO A UN
MOTOR HÍBRIDO
4.1 Motor híbrido
4.2 Engranes del motor híbrido 4.3 Bombas del motor híbrido
4.4 Análisis del balanceo del rotor y su engrane central 4.5 Simulación de la vibración
4.6 Referencias
Conclusiones
Recomendaciones para trabajos futuros
86
87 92 94 95 103 106
107
ÍNDICE DE FIGURAS
Capítulo 1
1.1 Eslabón y guía rígida (o guía flexible) 1.2 Perno articulado
1.3 Mecanismo de una máquina de acción directa 1.4 Ejemplo de movimiento esférico
1.5.a Mecanismo de levas con pares superiores
1.5.b Mecanismo con pares inferiores derivado de la figura 1.5ª
1.6.a Movimiento de una válvula de una bomba de vapor con pares superiores 1.6.b Movimiento de una válvula de bomba de vapor sólo con pares inferiores 1.7 Cuadrilátero articulado
1.8 Mecanismo compuesto
1.9 Enclavado el movimiento por gravedad
1.10 Sistema con un grado de libertad
1.11 Vibración en un sistema de un grado de libertad
1.12 Movimiento armónico
1.13 Motor híbrido mostrando las bombas hidráulicas y engranes
Capítulo 2
2.1 Juego externo 2.2 Juego interno
2.3 Engranaje
2.4 Contacto entre engranes 2.5 La forma involuta
2.6 Longitud de acción, arco de acción, y ángulo de ataque y de salida durante el
ESIME VII
acoplamiento de un engrane piñón
2.7 Cremallera involuta estándar de profundidad total 2.8 Un cambio en la distancia entre centros de engranes involutos 2.9 Nomenclatura de los dientes de engrane (vista frontal) 2.10 Interferencia y rebaje
2.11 Engrane de perfil desplazado
Capítulo 3
3.1 Desbalanceo estático 3.2 Balanceo de eje con disco
3.3 Gráfica de la amplitud en función de ω 3.4 Desequilibrio dinámico
3.5 Desequilibrio en dos planos 3.6 Pesos de corrección en dos planos 3.7 Máquina de equilibrado
3.8 Efecto cruzado en dos planos de balanceo
Capítulo 4
4.1 Vista lateral del motor híbrido
4.2 Vista lateral donde se aprecian las bombas impulsoras 4.3 Vista del engrane central impulsado
4.4 Engrane con cubiertas y flecha motriz
4.5 Bomba hidráulica
4.6 Vista frontal y lateral del arreglo de engranes y bombas 4.7 D.C.L. del engrane central del motor híbrido
4.8 Momentos de inercia
4.9 Esquema para análisis de fuerzas
4.10 Gráfica excentricidad-velocidad angular
4.11 Ampliación zona de comportamiento 4.12 Diagrama de bloques del fenómeno
4.13 Gráfica amplitud-tiempo del motor en operación
ESIME IX ÍNDICE DE TABLAS
Capítulo 2
2.1 Terminología de engranes
2.2 Número mínimo de dientes de piñón para evitar interferencia entre piñón de profundidad total y una cremallera de profundidad total.
2.3 Número mínimo de dientes de piñón para evitar la interferencia entre un piñón de profundidad total de 20° y engranes de profundidad total de diversos tamaños.
2.4 Números de calidad de engranes AGMA recomendados para varias aplicaciones.
2.5 Números de calidad de engranes recomendados para la velocidad en la línea de paso.
Capítulo 3
3.1 Elección de balanceo
Capítulo 4
4.1 Datos técnicos de los engranes
32 52
53
63
64
81
GLOSARIO
Aceleración: Es una cantidad vectorial que especifica el cambio de velocidad con respecto al tiempo.
Amortiguación (Amortiguamiento): Es la disipación de energía con el tiempo o distancia.
Amortiguación crítica: Es aquella cantidad de amortiguación viscosa que permite a un sistema elástico desplazado, regresar a su posición inicial sin sobrepeso, ni oscilación.
Amortiguación viscosa: Es la disipación de energía que ocurre cuando una partícula de un sistema que vibra es resistida por una fuerza cuya magnitud es proporcional a la velocidad de la partícula y cuya dirección es contraria al desplazamiento de la partícula.
Amortiguación viscosa equivalente: Es aquel valor de la amortiguación viscosa que se supone para el propósito del análisis de un movimiento vibratorio, de tal manera que la disipación de energía por ciclo en resonancia es la misma, ya sea para la fuerza de amortiguación supuesta o para la verdadera.
Amplitud: Es el valor máximo del desplazamiento en un movimiento vibratorio.
Armadura o bancada: Es una combinación de materiales resistentes capaces de soportar cargas o transmitir fuerzas, pero no tiene movimiento relativo de sus componentes.
ESIME XI Balanceo: Es el procedimiento para ajustar la distribución de masa de un rotor, así como la vibración de los muñones, o las fuerzas sobre los baleros por cada revolución y son reducidos o controlados.
Cantidad Armónica Simple: Es una cantidad periódica que está en función senoidal de la variable independiente. Así x = A sen (ωt + φ).
Donde:
x = Cantidad armónica simple
A = Amplitud
ω = Frecuencia angular
t = Tiempo
φ = Ángulo de fase
Cantidad Periódica: Es una cantidad oscilante cuyos valores se repiten para ciertos incrementos de la variable independiente.
Ciclo: Es la secuencia completa de valores de una cantidad periódica que ocurre durante un período.
Cimentación: Es una estructura que soporta la carga de gravedad de un sistema mecánico.
Decremento Logarítmico: Es el logaritmo natural de la razón de cualquiera de dos amplitudes sucesivas.
Distorsión: Es el cambio no deseado en la forma de una onda.
Eslabón: Es un elemento de una máquina o mecanismo que conecta otros elementos y que tiene movimiento relativo a ellos.
Espectro: Es la definición de una magnitud de los componentes de la frecuencia que constituyen una cantidad.
Espectro de Choque: (Espectro de respuesta). Es un trazo de la respuesta máxima experimentada por un sistema de un grado de libertad, así como una función de su propia frecuencia natural, en respuesta a un choque aplicado. La respuesta puede ser expresada en términos de aceleración, velocidad o desplazamiento.
Excitación: (Estímulo). Es una fuerza externa aplicada a un sistema, que origina al sistema una respuesta en cualquier forma.
Fase de una cantidad Periódica: Para un valor particular de la variable independiente, es la parte fraccional de un período por la cual ha avanzado la variable independiente, medida a partir de una referencia arbitraria.
Frecuencia: De una función periódica en tiempo es la recíproca del período. La unidad es el ciclo por unidad de tiempo, y es preciso especificarlo. En muchos países europeos, la unidad ciclo sobre segundo se denomina Hertz (Hz).
Frecuencia Circular Natural: Es la frecuencia de oscilación libre de un sistema. Para un sistema de múltiples grados de libertad, las frecuencias naturales son las frecuencias de los modos normales de vibración.
ESIME XIII
puede considerarse periódica en el sentido limitado de que el intervalo de tiempo entre los cruces por cero en el mismo sentido sea constante aún cuando las amplitudes sucesivas decrezcan progresivamente. La frecuencia de la vibración es la recíproca de este intervalo de tiempo.
Frecuencia Natural sin Amortiguamiento: De un sistema mecánico es la frecuencia de vibración libre que resulta exclusivamente de las fuerzas elásticas e inerciales del sistema.
Frecuencia Resonante: También llamada Frecuencia Circular de la Máxima Amplitud Forzada, es una frecuencia en la cual existe resonancia.
Grados de Libertad: De un sistema mecánico es igual al mínimo número de coordenadas independientes requeridas para definir completamente la posición de todas las partes del sistema en cualquier instante. En general, esto es igual al número de desplazamientos independientes como sean posibles.
Máquina: Sistema compuesto por uno o más mecanismos para trasmitir una cantidad considerable de energía.
Modo de Vibración: En un sistema bajo de vibración, un modo de vibración es una característica asumida por el sistema en el cual el movimiento de todas las partículas es armónico simple con la misma frecuencia. Dos o más modos pueden existir en un sistema múltiple de grados de libertad.
Modo Normal de Vibración: Es un modo de una vibración libre de un sistema sin amortiguación.
Modulación: Es la variación de las características de un régimen de ondas en función de otra onda que se desea transmitir.
Movimiento Armónico Simple: Es un movimiento tal que el desplazamiento es una función senoidal del tiempo, algunas veces se designa solamente por el movimiento armónico.
Movimiento por Choque: Es una excitación que provoca el movimiento de una cimentación.
Oscilación: Es la variación, generalmente con el tiempo de la magnitud de una cantidad con respecto a una referencia especificada, cuando la magnitud es alternativamente mayor y menor que la referencia.
Período: Es el incremento menor de la variable independiente (por ejemplo: tiempo) para el cual la función se repite.
Relación de Amortiguación: Para un sistema con amortiguación viscoso es la relación entre la amortiguación real y la amortiguación crítica expresada por:
c
C
C
=
ε
Respuesta: La respuesta de un dispositivo o sistema, es el movimiento (u otro producto) que resulta de una excitación (estímulo) bajo condiciones específicas.
ESIME XV Sistema de un Grado de Libertad: Es aquel para el cual sólo una coordenada es requerida para definir completamente la configuración del sistema en cualquier instante.
Sistema de varios Grados de Libertad: Es aquel para el cual dos o más coordenadas son requeridas para definir completamente la posición del sistema en cualquier instante.
Sistema Equivalente: Es aquel que puede ser sustituido por otro sistema para el propósito de análisis.
Sistema en Suspensión: Es aquel ensamble de partes de cierto tipo de máquinas balanceadas desde las cuales la estructura del rotor es suspendida.
Subarmónica: Es una cantidad sinusoidal teniendo una frecuencia que es una integral submúltiple de la frecuencia de una cantidad periódica la cual está relacionada.
Valor de Pico a Pico: De una cantidad oscilante, es la diferencia algebraica entre los extremos de la cantidad, indica el recorrido máximo de una onda.
Velocidad: Es una cantidad vectorial que específica el cambio de desplazamiento con respecto al tiempo.
Velocidad Crítica: Es la velocidad angular de un sistema en rotación que corresponde a una frecuencia de resonancia de un sistema.
Vibración Forzada: Es el movimiento que ocurre cuando existe o se aplica una fuerza externa.
Vibración Libre: Es el movimiento oscilatorio que ocurre en ausencia de una fuerza externa aplicada (función forzada externa).
ESIME XVII SIMBOLOGÍA
A Amplitud
c Coeficiente de amortiguación viscosa
c
c Amortiguamiento crítico
DCL Diagrama de cuerpo libre
f Frecuencia
n
f Frecuencia natural
F Amplitud de la fuerza mV Razón de velocidad angular
mA Razón de par de torsión o ventaja mecánica
mG Razón de engranes
rpm Revoluciones por minuto
ϕ Ángulo de presión
pc Paso circular
pd Paso diametral
α Aceleración angular
ω Velocidad angular
g Aceleración de la gravedad w Peso
Hz Hertz
k Constante de rigidez
m Masa del elemento o sistema
Q Factor de calidad r Radio
τ Período
x Desplazamiento
•
• •
x Aceleración
n
ω Velocidad angular crítica o frecuencia natural q Frecuencia libre amortiguada
xom
ω Frecuencia de resonancia
φ Ángulo de fase
ξ Razón de amortiguamiento
δest Elongación del resorte Vo Velocidad inicial
AGMA American Gear Manufacturers Association
ESIME XIX RESUMEN
Uno de los puntos clave en el análisis de los mecanismos es la evaluación de sus condiciones de operación. En este trabajo esta situación es vista y aplicada a los engranes. También, en este trabajo se analiza el balanceo dinámico de un rotor y su engrane central, idealizado como un disco. Estos dos conforman partes primordiales del Programa Institucional de Formación de Investigadores del Proyecto denominado “Diseño y Fabricación de un Motor Ecológico”, con clave CGPI 2001-0097. En el análisis se identifica plenamente la situación dinámica respecto a la vibración del prototipo estudiado.
A fin de tener un marco referencial adecuado en el Capítulo 1 se presenta una introducción y se abordan conceptos útiles de la teoría de mecanismos que será necesario tener presentes en el estudio, tales como definiciones de mecanismo, armadura, eslabón, cadena cinemática, pares tipos de eslabones, movimiento y tipos de movimiento, inversión cinemática. Se abordan las vibraciones mecánicas definiéndose además el concepto de vibración, y los problemas típicos que esta produce en sistemas conformados por engranes.
En el Capítulo 2 se aborda la teoría propia de los engranes dándose a conocer la nomenclatura usada en los dientes, formas de originar a éstos, la forma en que influye el proceso de maquinado en la condición final de los dientes , mencionando además algunos métodos comunes en la fabricación de engranes. Todo lo anteriormente expuesto se hace necesario para conocer las causas de anomalías que pueden llegar a presentarse en el funcionamiento de un mecanismos con engranes como es el caso de la vibración.
ESIME XXI ABSTRACT
One of the key points in the analysis of mechanism is the evaluation of their operation conditions. In this work, this situation is tackled and it is applied to gears. Therefore, in this work the dynamic balancing of a rotor and its central gear is analyzed, and idealized as a disc, forming two main parts of an institutional IPN project denominated “Ecologic Motor Design and Fabrication, . It is identified as the dynamic situation in respect of prototype vibration.
In order to obtain a good referential set in the 1st chapter it is presented an introduction and useful concepts about the mechanism theory which may be remembered in this study such as definitions of mechanism, armor, bar, cinematic inversion, and the typical problems that produce gear problems.
In the 2nd chapter the proper gear theory is reviewed, knowing the used nomenclature on the teeth , ways to originate these ones, and the way it takes part in the machinery process in the final condition of the teeth, naming some common methods in the gears fabrication. All the things named before are important to know what makes things go wrong, such as the vibration case.
IN the 3rd chapter an introduction is given about the different types of balancing, its presence in the rotors and its causes. A movement equation for a dynamic unbalancing of a rotor with a main disc is developed.
OBJETIVO
El objetivo principal de este trabajo es determinar la respuesta del comportamiento dinámico de un motor híbrido, operando con un movimiento angular constante, a través del comportamiento vibratorio que se puede presentar durante su operación. Para lo anterior se sigue la siguiente metodología:
Ø Formulación del modelo matemático.
Ø Determinación de las ecuaciones que gobiernan el comportamiento del sistema. Ø Solución matemática del modelo.
Ø Análisis de resultados.
ESIME XXIII JUSTIFICACIÓN
Actualmente, la Industria Mexicana depende en gran parte de la tecnología extranjera, la cual limita el desarrollo tecnológico del país. Al no contar con desarrollos propios en México, se repiten modelos productivos relacionados con motores tradicionales, que si bien tienen ventajas que les permiten ser tanto de fácil adquisición y reparación suelen presentan algunos inconvenientes en cuanto a niveles energéticos y ambientalistas se refiere, aunado a la consabida dependencia tecnológica.
El desarrollo de un sistema mecánico, como lo es el Motor Híbrido, permitirá incursionar en nuevas líneas de desarrollo propias que permitan evolucionar en los estadios científicos y tecnológicos que requiere la nación. Así, en el presente trabajo se enfatiza una de las partes importantes a analizar en los equipos rotativos, como lo es las vibraciones que llegan a ser, en su gran mayoría, debidas al desbalance. De no corregirse y controlarse éste, se presentan invariablemente situaciones indeseables como:
Ø Reducción de la vida de servicio de la maquinaria Ø Producción deficiente de productos
Ø Paros y tiempos perdidos innecesarios
Entre varias de las causas del desbalanceo en partes rotativas se tienen la falta de homogeneidad e isotropía en la construcción de los rotores, falta de simetría en las partes manufacturadas y una distribución no uniforme de la masa.
En el presente trabajo se enfatizan los conocimientos básicos de los mecanismos aplicándolo al estudio del balanceo dinámico de un rotor con disco al centro dando
INTRODUCCIÓN
Dentro de la Ingeniería a nivel mundial, se emplean actualmente maquinarias rotatorias para un sinfín de aplicaciones que le facilitan al ser humano sus trabajos. Un caso recurrente es el uso de motores para el movimiento de ejes que se conectan a mecanismos que realizan desplazamientos de cuerpos, efectuando con ello los trabajos para los que fue proyectado dicho sistema. Aparece aquí el balanceo de las máquinas rotatorias como un elemento indispensable para mantener la continuidad de los beneficios obtenidos con los trabajos realizados por la maquinaria empleada. Dicho balanceo permitirá prolongar la vida útil y económica del equipo rotatorio en cuestión.
En la actualidad, la demanda de satisfactores obtenidos por los sistemas operativos y productivos mantiene un elevado crecimiento y a la par con ello crece paralelamente la necesidad de controlar las variables que se presentan durante la operación de los sistemas. Así el desbalanceo manifestado como una vibración debe ser analizado desde el proyecto de la maquinaria, a fin de establecer el comportamiento dinámico de los elementos rotatorios.
En el estudio de la vibración en los rotores de los motores intervienen aspectos releva ntes como son el equilibrio entre seleccionar un material sumamente rígido que le permita resistir todas las cargas presentes, tanto estáticas como dinámicas; y por otro lado, el que este material tenga condiciones de rigidez o flexibilidad no convenientes. Lo anterior implica que la frecuencia natural de vibración esté dentro de un intervalo que limite las condiciones de operación.
Lo anterior se analiza en el presente trabajo partiendo desde los elementos básicos
ESIME XXV
El presente trabajo esta estructurado en cuatro capítulos donde se desarrollan las bases teóricas que intervienen para llevar el objetivo central. Así, se inicia desde una introducción a los mecanismos hasta el fenómeno de la vibración. Seguidamente se manejan los engranes por formar parte fundamental del motor híbrido y se prosigue con los tipos de balanceo. Se concluye con el análisis del balanceo del eje central del motor con su engrane al centro. Una breve descripción de cada capítulo se menciona a continuación:
En el capitulo uno, Generalidades, se expone las bases necesarias para comprender los conceptos y principios básicos involucrados en todos los tipos de mecanismos y la relación que tienen con los engranes. Asimismo se define el concepto de vibración.
En el capitulo dos, Engranes, se expone la teoría propia de los engranes a fin de identificar sus características mas representativas. Cabe señalar que el motor híbrido emplea engranes como elementos impulsores.
En el capitulo tres, Desbalanceo, se abordan los aspectos relativos a los diferentes tipos de desbalanceo, analizándolo desde sus diferentes causas, hasta el modelo matemático empleado para su análisis.
En el capitulo cuatro, Aplicación al balanceo de un motor híbrido, se aborda una aplicación del balanceo a un motor híbrido mostrando las características relevantes a considerar en dicho análisis. Se presentan los resultados obtenidos con una simulación de la vibración en Matla b.
Es importante señalar este trabajo esta relacionado con el Programa Institucional de formación de Investigadores con el Proyecto denominado “Diseño y Fabricación de un Motor Ecológico con clave CGPI 2001-0997.
ESIME 1
CAPÍTULO 1
GENERALIDADES
Generalidades
1.1 Antecedentes
Desde los inicios de la humanidad, cuando el hombre empezó a resolver la necesidad de transmitir fuerzas, lo logró utilizando contacto por rodaduras, lo cual le dió buenos resultados cuando las magnitudes de las fuerzas no eran muy grandes. En el caso de ser muy grandes ocurría el fenómeno de resbalamiento, no lográndose la transmisión deseada; para que esto no ocurriera se fabricaron ruedas con dientes, y así nacieron los engranes.
Los engranes tienen un largo historial. Se sabe que, alrededor de 2600 a. C., los chinos usaron una serie compleja de engranes. En la China Ancestral, la Carroza que apunta hacia el sur, que en tiempos prebíblicos supuestamente cruzaba el desierto de Gobi, contenía engranes. Asimismo, Aristóteles en el siglo IV a. C., describió a los engranes como objeto de uso común. En el siglo XV d.C., Leonardo De Vinci muestra en sus dibujos una gran cantidad de dispositivos en los que se combinaban muchas clases de engranes. Muy probablemente los primeros engranes fueron fabricados de madera y de
otros materiales fácilmente trabajables, siendo sus dientes simples espigas insertadas en un disco o una rueda. No fue hasta que llegó la Revolución Industrial que las máquinas los requirieron y las técnicas de fabricación permitieron la creación de engranes como los conocemos ahora, con dientes especialmente conformados, moldeados o cortados en discos de metal.
ESIME 3
Los engranes transmiten grandes pares de torsión con una relación definida en un pequeño espacio. Cuando se hacen adecuadamente y se mantienen lubricados, son silenciosos, confiables y de larga duración. Entre los diversos medios de transmisión de la potencia mecánica, los engranes son, generalmente, los más fuertes y durables. Su
eficiencia de transmisión de potencia es hasta del 98%. Por otra parte, los engranes son más costosos que las cadenas y las bandas. Como es de suponer, los costos de inversión en la manufactura de los engranes aumentan enormemente al incrementar la precisión, como cuando son requeridos para la combinación de altas velocidades y cargas pesadas con bajos niveles de ruido. Para lograr esto último es indispensable balancear periódicamente, dichos engranes, a fin de evitar las vibraciones que suelen presentarse después de un prolongado tiempo de trabajo. De no balancear los engranes oportunamente, se corre el riesgo que al fallar este, se vea interrumpido, en la industria, el proceso dentro del cual formaba parte, con las consabidas repercusiones de la falta de producción. El tipo de engranes más utilizado es el de involuta.
Fue Wilfred Lewis, quien introduce el sistema de involuta para el diseño del diente, el cual es la forma geométrica de uso mas generalizado en el mundo hasta nuestros días. Algunas de las características más notables de la forma de la involuta son: su gran
versatilidad y su baja sensibilidad con respecto a pequeñas variaciones de distancia entre centros. Además, en lo que respecta a suavidad de marcha, se ha logrado alta eficiencia de operación, alta fiabilidad y relativa facilidad de manufactura, Así mismo, las herramientas de corte, para satisfacer adecuadamente la gran diversidad de requerimientos de diseño, se pueden normalizar, cosa que no es posible con otro tipo de geometría de dientes.
1.2 Mecanismos, tipos de mecanismos, grados de libertad [1.1]
Mecanismos
Un mecanismo es una combinación de materiales resistentes cuyas partes tienen movimiento relativo rígido. Una máquina está compuesta de uno o más mecanismos. Cuando se habla de un mecanismo, se piensa en un dispositivo que producirá ciertos movimientos mecánicos, haciendo a un lado de sí está capacitado para hacer un trabajo útil. Un mecanismo puede o no, estar diseñado para transmitir una considerable cantidad de energía; alternativamente una máquina debe estar capacitada. Esta última, entonces es el desarrollo práctico del anterior.
El modelo en funcionamiento de cualquier máquina, el conjunto de las piezas de un reloj y las partes móviles de un instrumento de ingeniería, reciben el nombre de mecanismos, porque la energía transmitida es muy poca, precisamente lo suficiente para sobreponer la fricción, y el factor importante lo forman los movimientos producidos.
1.2.1 Armadura o bancada
ESIME 5 1.2.2Eslabón
Es un elemento de una máquina o mecanismo que conecta otros elementos y que tiene movimiento relativo a ellos. Un eslabón puede servir de soporte, como guía de otros
eslabones, para transmitir movimiento, o bien funcionar en las tres formas.
Entonces, en una máquina de vapor (como ejemplo), la biela, la manivela, la cruceta y la armadura son eslabones, ya que cada uno funciona cuando menos en una de estas tres formas. Un solo eslabón puede estar compuesto de varias piezas, siempre que sus diferentes partes estén ligadas unas a las otras para que se muevan como una unidad; la biela consiste en una varilla, utensilios, taquetes, cuñas, pernos, etc., todos los cuales estén rígidamente conectados y forman un solo eslabón.
En relación con el trabajo mecánico en general, la palabra eslabón es empleada para definir a una solera ranurada, como las que se muestran en las siguientes figuras 1.1 y 1.2 o a una sección de una cadena común y corriente.
Los eslabones rígidos, tales como las partes acabadas de mencionar de la máquina de vapor, están capacitados para transmitir fuerza, para jalar o empujar. A esta clase pertenece la mayoría de las partes metálicas de las máquinas. Desde luego hay muchos ejemplos de eslabones flexibles, que en general están constituidos para ofrecer resistencia
en una sola forma. Así pues, los eslabones de tensión, tales como cuerdas, bandas y cadenas, transmiten fuerza para jalar pero no para empujar, mientras que los eslabones de presión o compresión, como el agua en un acumulador hidráulico y sistema de bomba, o el aceite en el sistema de freno hidráulico en un automóvil, son capaces de conducir solamente una fuerza de empuje.
Cuando un número de eslabones están conectados unos a los otros de tal forma que permitan que el movimiento se efectúe en combinación, se denomina cadena cinemática.
1.2.3 Cadena cinemática
Son los sistemas que resultan de conectar un determinado número de eslabones por medio de pares. Una cadena cinemática no es necesariamente un mecanismo, se convierte en uno cuando está construido en tal forma que admite un movimiento relativo limitado o
rígido entre sus partes.
1.2.4 Pares de elementos
ESIME 7 1
2
1 2
4
1
3
1 = Armadura 2 = Manivela 3 = Biela 4 = Cruceta 2
1.2.5 Pares de des lizamiento
Son aquellos en el cual existe un movimiento relativo de los puntos de contacto (como en la figura 1.1).
Cuando dos cuerpos están de tal forma conectados que uno está limitado a girar sobre un eje fijo que pasa a través del otro, a las superficies de contacto se les llama pares cerrados. Los pernos articulados de las figuras 1.2 y 1.3 pertenecen a esta clase.
[image:34.596.220.401.318.442.2]Figura 1.2 Perno articulado
Figura 1.3 Mecanismo de una máquina de acción directa
o
M
Y A
X L
Z
contacto, (o sea a lo larga del eje de rotación), por lo cual la acción deslizante no es necesariamente cinemática.
1.2.6Pares en rodadura
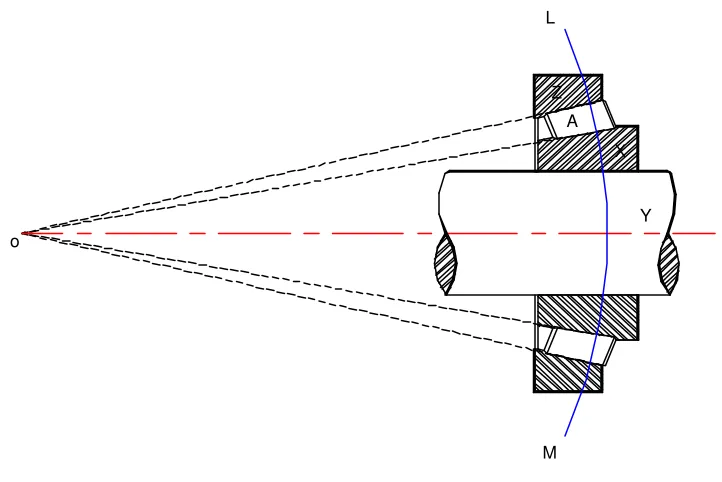
[image:35.596.109.470.381.622.2]Son aquellos donde no existe movimiento relativo de los puntos de contacto. Cojinetes de bolas y baleros contienen ejemplos de este tipo de pares. En la figura 1.4 se muestra una sección de un cojinete de bolas cónico, donde el cursador interior X gira con la flecha Y, y el cursador Z es estacionario. Un punto, tal como A, se mueve sobre la superficie de la esfera LAM, cuyo centro esta en O. Así los pares en rodadura están formados por los puntos de contacto de los balines y su carrera.
ESIME 9 1.2.7 Pares inferiores
Se obtienen cuando dos eslabones están en contacto sobre superficies limitadas, siendo los elementos del par geométricamente similares. Una flecha en rotación ajustada con
baleros comunes, un perno con cuerda y su tuerca, él embolo de una máquina con sus guías, son todas ilustraciones de pares inferiores (véase figuras 1.2 y 1.3). Esta es la forma más común de pares en la maquinaria, puesto que presentan la ventaja práctica de ofrecer grandes superficies de desgaste.
1.2.8 Pares superiores
Existen cuando dos eslabones hacen contacto sobre una línea o un punto. Aquí las superficies de contacto no son sobre una línea o un punto y las superficies de contacto no son similares en forma. Los pares superiores están en engranes, puesto que los dientes hacen contacto en puntos o sobre líneas, y también en las bolas y los cojinetes, puesto que presentan línea y punto de contacto, respectivamente, con las carreras. Los pares superiores con contacto en rodadura tienen pequeñas pérdidas por fricción.
Se debe notar que en las máquinas prácticas, como los materiales empleados poseen poca elasticidad, ocur re cierta distorsión de las superficies de contacto cuando se les aplica presión. Entonces, cuando ocurre una línea o un punto de contacto, siempre obtenemos alguna superficie de contacto. Esta condición, combinada con el uso de lubricantes, hace posible el uso de pares en deslizamiento con líneas o puntos de contacto en los casos donde la velocidad del deslizamiento es muy poca.
1 2
3
1
3
2 4
es idéntico en ambos mecanismos. La figura 1.6a muestra el mecanismo empleado para mover bombas de vapor de doble acción; aquí encontramos nuevamente evidencia de pares superiores entre un par de eslabones. La figura 1.6b muestra este mecanismo alterado a un par inferior solamente.
En los dos casos acabados de mencionar, los pares inferiores fueron producidos por la adición de un eslabón. Este es el método que se debe adoptar usualmente. Con ello se logra no concentrar la presión o el contacto sobre una línea o un punto, lo cual propicia, en lo casos donde la velocidad de deslizamiento es grande, desgaste prematuros de los pares de eslabones conectados.
Figura 1. 5a Mecanismo de levas con pares superiores
ESIME 11 1
2 1
3
1
2
1 3
4 1
1
[image:38.596.103.507.69.297.2]Figura 1. 6a Movimiento de una válvula de una bomba de vapor con pares superiores
Figura 1. 6b Movimiento de una válvula de bomba de vapor sólo con pares inferiores
1.2.9 Tipos de eslabones [1.2]
2
1 3
4
1 2
3
4
v Una manivela ejecuta rotaciones completas sobre un centro fijo como se muestra
en la figura 1.7. En ella la manivela es el eslabón 2.
v Una palanca es un eslabón en forma de varilla o barra que oscila a través de un
ángulo, invirtiendo su sentido de rotación a ciertos intervalos. Véase el eslabón número 4 en la figura 1.7.
v Una corredera es un eslabón en forma de varilla, bloque o barra ranurada, que
desliza sobre la superficie de un segundo eslabón. Se puede mover en línea recta como la cruceta, o eslabón 4, de la máquina de vapor de la figura 1.3, o se puede mover en una guía rígida o curva, como lo hace el bloque en la figura 1.1.
Figura 1.7 Cuadrilátero articulado
1.2.10 Movimiento [1.3]
ESIME 13
4 3
A
5 6
1 2
4 A
3
5 1
2
6
movimiento relativo en los dos casos, y las designaciones arriba mencionadas solamente son una manera convencional de diferenciarlos.
1.2.11 Movimiento limitado rígido
Se dice que un cuerpo tiene movimiento rígido cuando está de tal forma guiado por el contacto de otros cuerpos, o por fuerzas externas, que cualquier punto en el, esté obligado a moverse sobre una trayectoria definida. Cualquier eslabón de un mecanismo tiene movimiento rígido.
1.2.12 Movimiento semirígido.- Existe cuando el movimiento de un cuerpo está solamente restringido a ciertas direcciones, o para que se efectúe dentro de ciertos límites. Por ejemplo, considerando la cadena cinemática mostrada en la figura 1.8, que consiste en cinco eslabones con pares cerrados, es evidente que los eslabones 3 y 4 solamente semi-rígidos, ya que un punto como A, se puede mover a cualquier parte de la superficie cuyos límites quedan fijados por la distancia de los eslabones. Si, en todo caso,
le agregamos otro eslabón a la cadena, como el 6, con pernos, entonces la rigidez se completa, ya que cualquier punto en cualquier eslabón que seleccionemos tendrá una trayectoria definida de movimiento. Ahora la cadena es un mecanismo.
Las siguientes clases comunes de cadenas cinemáticas tienen rigidez completa, previniendo que los pares estén construidos de tal forma que permanezcan en contacto:
1. Cadenas de cuatro eslabones, en las cuales cada uno de ellos lleva elementos de
dos pares inferiores. Las figuras 1.3, 1.5b, 1.6b y 1.7 ilustran esta clase.
2. Cadenas de tres eslabones, en las cuales cada uno contiene elementos de dos pares: pares superiores entre dos eslabones y pares inferiores para las otras dos conexiones. Las figuras 1.5a y 1.6a muestran este tipo de mecanismos.
Estas cadenas se denominan mecanismos simples.
Hay varios mecanismos conocidos como mecanismos compuestos, que tienen más de cuatro eslabones y en los que ciertos eslabones contienen elementos de más de dos pares. En la figura 1.8, en la cual se agregó un eslabón, ilustra un mecanismo de este tipo. Frecuentemente un mecanismo compuesto es la combinación de dos o más mecanismos simples.
En muchos mecanismos, la rigidez no es completamente efectiva debido a la forma de los eslabones empleados, la acción de la gravedad, la presión de resortes, la fuerza centrífuga, et c. Por ejemplo, el plato de una cepilladora se mantiene en contacto y alineado con la bancada por la gravedad, que previene que las guías en forma de V situadas en su cara inferior, se desenganchen de sus correspondientes ranuras en la cara superior de la bancada, como se muestra en la figura 1.9. También en muchos mecanismos de levas, las rodajas se mantienen en contacto con la leva por medio de
ESIME 15
Guías
[image:42.596.167.497.86.300.2]Bancada Plato
Figura 1.9 Enclavado el movimiento por gravedad
1.2.13 Inversión de un mecanismo
En cualquier mecanismo tenemos un eslabón que es fijo, esto es, que esta en reposo con relación a la Tierra, o al cuerpo en que está montado. Exactamente al mismo sistema de eslabones, con frecuencia se puede convertir provechosamente para un diferente propósito, si al eslabón originalmente fijo le es permitido moverse, mientras que algún otro eslabón se mantiene estacionario. Así, en la figura 1.3 que representa el mecanismo ordinario de una máquina, el eslabón fijo es 1. Si fijamos la manivela 2 y permitimos que 1 se mueva, obtenemos un dispositivo que se emplea en el mecanismo de retorno rápido en cierta maquinaria de herramienta. A este último mecanismo se le denomina una inversión del anterior.
1.2.14 Clasificación de los movimientos [1.6]
La mayoría de los movimientos que están presentes en los mecanismos se clasifican en las siguientes clases:
a) Movimiento coplanario de un cuerpo, se obtiene cuando todos los puntos en el mismo se mueven en planos paralelos o coincidentes. Cuando se estudia el movimiento coplanario, no se considera el espesor de los eslabones perpendiculares al plano de movimiento y hablamos del centro de rotación, centro instantáneo, etc., en lugar del eje de rotación, eje instantáneo, etc., que son los términos correctos para cuerpos reales. Esto simplifica la expresión y no disminuye el valor de la información obtenida, ya que todos los puntos en cualquier perpendicular al plano de movimiento se muestra de forma idéntica.
El movimiento coplanario es común a todos los mecanismos mostrados en las figuras 1.2 a 1.9. Los diagramas podrían haber sido simplificados dibujando líneas que representen eslabones de esta forma se obtienen los llamados diagramas esquemáticos. En la figura 1.8 se muestra la proyección de un mecanismo y también su diagrama esquemático. Otra forma de movimiento coplanario es, el movimiento rectilíneo, en el cual todos los puntos de un cuerpo determinado se mueven en líneas rectas paralelas como se muestra en la figura 1.3.
b) El movimiento helicoidal es ejecutado cuando un cuerpo gira sobre un eje y al mismo tiempo se mueve paralelamente el mismo eje, teniendo ambos movimientos una proporción fija el uno del otro. El movimiento de una tuerca en un perno con cuerda es un eje mplo muy común. Cualquier punto en un cuerpo
ESIME 17
c) Movimiento esférico: Se dice que un cuerpo tiene movimiento esférico cuando se mueve de tal forma que cualquier punto en él permanece equidistante de un punto fijo. Cualquier punto en el cuerpo, se mueve entonces sobre la superficie de una esfera.
La figura 1.4 muestra un corte seccional de un cojinete de bolas cónico. Generalmente el cursador interior X gira con la flecha Y, y el cursador exterior Z es estacionario. Un punto, tal como A, en uno de los balines se mueve sobre la superficie de la esfera LAM, cuyo centro esta en el punto O; así pues, los balines tienen movimiento esférico. Otros ejemplos se encuentran en ciertos cojinetes de bolas, en engranes cónicos, y en juntas universales.
1.2.15 Determinación del movimiento de un cuerpo
El movimiento de un cuerpo se estudia por la consideración del movimiento de ciertos puntos en él. El número de puntos considerados depende de sí el cuerpo se puede mover de cualquier manera, o de sí su movimiento está limitado a un tipo especial, por ejemplo,
movimiento coplanario y movimiento helicoidal.
Cuando un cuerpo tiene movimiento coplanario, por el mismo rozamiento se puede ver que solamente es necesario controlar el movimiento de dos puntos en orden de asegurar rigidez completa.
Cuando el movimiento es rectilíneo, el movimiento de un punto determina el de cualquier otro del cuerpo, ya que todos los puntos en él tienen exactamente el mismo movimiento.
1.3 Vibraciones mecánicas
El estudio de las vibraciones mecánicas se refiere a los movimientos oscilatorios de los cuerpos y, a las fuerzas asoc iadas a ellos. Todos los cuerpos por poseer masa y elasticidad tienen capacidad de vibrar. La mayoría de las máquinas y estructuras experimentan vibración hasta cierto grado y, su diseño, requiere generalmente considerar su conducta oscilatoria.
1.3.1 Definición de vibración [1.4]
Una vibración mecánica es el movimiento de una partícula o de un cuerpo que oscila alrededor de una posición de equilibrio. Esta se produce casi siempre cuando un sistema es desplazado desde una posición de equilibrio estable. El sistema tiende a regresar a su posición bajo la acción de fuerzas de restitución (ya sean fuerzas elásticas, como en el caso de la masa unida a un resorte, o fuerzas gravitacionales en el caso de un péndulo). Pero el sistema alcanza generalmente su pos ición inicial con cierta velocidad adquirida que lo lleva más allá de esa posición. Como el proceso puede repetirse indefinidamente,
ESIME 19
tiempo define la frecuencia y el desplazamiento máximo del sistema de su posición de equilibrio se llama amplitud de la vibración.
Cuando el movimiento es mantenido únicamente por las fuerzas de restitución se dice
que es una vibración libre. Por otra parte, cuando se aplica una fuerza periódica al sistema, el movimiento resultante se describe como una vibración forzada. Cuando los efectos del rozamiento pueden despreciarse se dice que las vibraciones son no amortiguadas. Pero en realidad todas las vibraciones son amortiguadas hasta cierto grado. Si una vibración libre es solo ligeramente amortiguada, su amplitud decrece lentamente hasta que después de cierto tiempo el movimiento se detiene. Pero el amortiguamiento puede ser lo bastante grande para impedir cualquier vibración real; el sistema regresa entonces lentamente a su posición inicial. Una vibración forzada amortiguada se mantiene hasta en tanto dure la aplicación de la fuerza periódica que produce la vibración. Ésta se modifica en función directa de la magnitud de las fuerzas de amortiguamiento.
1.3.2. Sistemas de un grado de libertad [1.5]
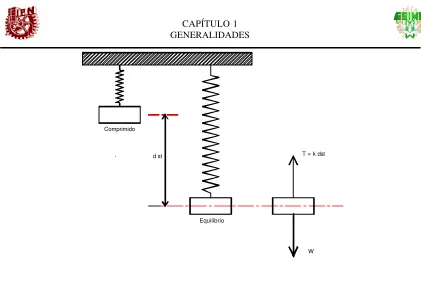
Considérese un cuerpo de masa “m” unido a un resorte de constante “k” como se muestra en la figura 1.10. Como ahora importa solo el movimiento de su masa se puede considerar a este cuerpo como una partícula. Cuando la partícula está en equilibrio estático, las fuerzas que actúan sobre ella son su peso W y la fuerza T ejercida por el
resorte, de magnitud T = k δest, donde δest representa la elongación del resorte. Se tiene por consiguiente:
W = k δEST (1.1)
d st Comprimido
Equilibrio
[image:47.596.87.508.63.347.2]W T = k dst
Figura 1.10 Sistema con un grado de libertad
Supóngase ahora que la partícula se desplaza una distancia Xm desde su posición de equilibrio y se suelta sin velocidad inicial. Si Xm se ha escogido más pequeña que δest, la partícula se moverá hacia uno y otro lado de su posición de equilibrio, generándose una vibración de amplitud Xm. Nótese que la vibración puede también producirse dándole cierta velocidad inicial a la partícula cuando está en su posición de equilibrio X = 0 o, en forma más general, soltando la partícula desde cualquier posición dada X = Xo con una velocidad inicial Vo. Dado que el movimiento es únicamente en la dirección vertical, se dice que tiene un solo grado de libertad.
1.3.3 Vibraciones sin amortiguamiento
ESIME 21
X Equilibrio
+ Xm
W P
ma = mx¨ 0
Xm
[image:48.596.87.502.64.327.2]T = k(dst + X)
Figura 1.11 Vibración en un sistema de un grado de libertad
Representando por x el desplazamiento OP medido desde la posición de equilibrio O (positivo hacia abajo), notamos que las fuerzas que actúan sobre la partícula son su peso
W y la fuerza T ejercida por el resorte, que en esta posición tiene una magnitud T = k (δest + x). Considerando la ecuación 1, encontramos que la magnitud de la resultante F de las dos fuerzas (positiva hacia abajo) es
F = W - k(δest + x) = - Kx (1.2)
En esta forma, la resultante de las fuerzas ejercidas sobre la partícula es proporcional al desplazamiento OP medido desde la posición de equilibrio. De acuerdo a la convención de signnos, F está siempre dirigida hacia la posición de equilibrio O. Sustituyendo F en la
ecuación básica F = m a y recordando que a es la segunda derivada, •x , de x con • respecto a t, escribimos:
Nótese que la misma convención de signo debe utilizarse para la aceleración x? y para el desplazamiento x, es decir, positivo hacia abajo.
La ecuación 3 es una ecuación diferencial lineal de segundo orden. Escogiendo
p2 = k/m (1.4)
Escribimos (3) en la forma:
•x + p• 2x = 0 (1.5)
El movimiento definido por la ecuación (5) se llama movimiento armónico simple. Se caracteriza por el hecho que la aceleración es proporcional al desplazamiento y de sentido opuesto. Notamos que cada una de las funciones x1 = sen pt así como x2 = cos pt satisfacen (5). Por lo tanto, estas funciones constituyen dos soluciones particulares de la ecuación diferencial (5). Como veremos ahora, la solución general de (5) puede obtenerse multiplicando las dos soluciones particulares por constantes arbitrarias A y B y sumándolas. Escribimos:
x = Ax1 + Bx2 = A sen pt + B cos pt (1.6)
Al derivar, tenemos sucesivamente la velocidad y la aceleración al tiempo t:
v =
x
• = Ap cos pt – Bp sen pt (1.7)ESIME 23
pt
a)
P
Xm Q B xm
O
-Xm
t
pt
o A x
b)
Sustituyendo (1.6) y (1.8) en (1.5), comprobamos que la expresión (1.6) es una solución de la ecuación diferencial (1.5). Como esta expresión contiene dos constantes arbitrarias A y B depende de las condiciones iniciales del movimiento. Por ejemplo, tenemos A = 0 si la partícula es desplazada desde su posición de equilibrio y se suelta t = 0 sin velocidad
inicial, y tenemos B = 0 si P es parte de 0 en t = 0 con cierta velocidad inicial. En general, sustituyendo t = 0 y los valores iniciales xo y vo del desplazamiento y la velocidad en (1.6) y (1.7), encontramos:
A = vo / p y B = xo
Las expresiones obtenidas para el desplazamiento, la velocidad y la aceleración de la partícula, pueden escribirse en forma más compacta si observamos que (1.6) expresa que el desplazamiento x = OP es la suma de las componentes x de los dos vectores A y B, respectivamente, de magnitud A y B dirigidos en la forma indicada en la figura 1.12a
Figura 1.12 Movimiento armónico
entonces proyectando sobre este eje el movimiento de un punto Q que describe un circulo auxiliar de radio Xm con una velocidad angular constante p.
Representando por ϕ el ángulo formado por los vectores OQ y A, escribimos:
OP = OQ sen(pt + ϕ) (1.9)
Que nos conduce a nuevas expresiones para el desplazamiento, la velocidad y la aceleración de P:
x = Xm sen(pt + ϕ) (1.10)
v =
x
•=Xmp cos(pt + ϕ) (1.11)a = •x = - Xmp• 2 sen(pt + ϕ) (1.12) La curva de desplazamiento-tiempo se representa por una curva senoidal figura 1.12b, y el va lor máximo Xm del desplazamiento se llama amplitud de la vibración. La velocidad angular p del punto Q que describe el círculo auxiliar se conoce como la frecuencia circular de vibración y se mide en rad / s, mientras que el ángulo ϕ que define la posición inicial de Q sobre él círculo se llama ángulo de fase. De la figura 1.12 notamos que un
ciclo completo se ha descrito después de que el ángulo pt ha aumentado 2π rad. El valor correspondiente de t, representado por τ, se llama periodo de vibración y se mide en segundos. Tenemos
Periodo = τ = 2π / p (1.13) El número de ciclos que efectúa en la unidad de tiempo se representa por f y se conoce como frecuencia de vibración. Escribimos
ESIME 25
La unidad de frecuencia es una frecuencia de 1 ciclo por segundo correspondiente a un periodo de 1 s.
1.4 Problemas típicos debidos a la vibración en engranes
Un problema práctico más importante es estimar la vida de dos engranes ensamblados, ya que transmiten potencia de uno al otro y así someten sus dientes a cargas cíclicas.
Este tipo de problemas se pueden resolver por varios métodos. Estos métodos dan una estimación de la vida de los engranes con base en la vida de los dientes bajo cargas cíclicas.
El problema básico resuelto por los engranes es asegurar que los discos gruesos, en contacto, giren uno contra el otro sin deslizarse.
Los dos problemas básicos que se presentan en la transmisión de potencia de los engranes son:
1) La fabricación de los engranes mismos, ya que no poseen un perfecto maquinado de los mismos esto origina deslizamiento en la superficie de contacto.
2) El desbalanceo que pueda existir en la transmisión, esto origina que exista una mayor vibración en el sistema y que por consiguiente las superficies de contacto no sean las adecuadas y los engranes se desgasten por este motivo.
posible con diseños apropiados. El análisis de las vibraciones se ha vuelto cada vez más importante en los últimos años en virtud de la tendencia actual de emplear máquinas de alta velocidad y estructuras más ligeras. Existe evidencia para esperar que esta tendencia continúe y que se tenga una necesidad mayor de desarrollar en el futuro el análisis de las
vibraciones.
1.5 Motores híbridos (o motores ecológicos)
El Instituto Politécnico Nacional mantiene como programa Institucional el de Formación de Investigadores (PIFI). Enmarcado dentro de este programa se encuentra registrado el Proyecto denominado “Diseño y Fabricación de un Motor Ecológico” cuya clave es CGPI 2001-0997. Este proyecto lo respalda la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) en su Sección de Estudios y Proyectos de Investigación (SEPI) Unidad Zacatenco.
Actualmente el proyecto tiene cubierta la parte correspondiente a la recopilación de información acerca de cómo se encuentra en la actualidad el estado de arte de los motores
no contaminantes y de las formas de como ha ido evolucionando la utilización de otros tipos de energía alternativa. Sobresalen de manera especial los motores hidráulicos, los pistones Neumáticos y los servomotores, entre otros. Así, con esta investigación se procedió, una vez comprendido el principio de funcionamiento de los sistemas hidráulicos, a la aplicación al modelo proyectado del motor ecológico. El concepto o principio es la trasmisión de fuerzas por medio de un fluido incompresible, del tipo de aceites hidráulicos.
La ventaja de los sistemas hidráulicos es la multiplicar la fuerza aplicada en un área especifica, y de acuerdo al Principio de Pascal, la presión de un mismo fluido aplicada en
diferentes superficies dará diferentes valores de fuerzas. La ecuación básica es a f A F
ESIME 27
proyecto se basa en el principio indicado, lográndose la concepción y fabricación de un motor híbrido.
Dicho motor será impulsado a base de cuatro motores hidráulicos, que ha su vez son
impulsados por una bomba hidráulica, la cual simultáneamente es, a su vez, accionada eléctricamente por medio de una batería recargable. La recarga se logra utilizando un alternador movido por una flecha que es impulsada por el conjunto de cuatro motores, cerrando con esto el sistema. Se muestra la figura 1. 13 que corresponde al prototipo en su fase actual. Cabe señalar que este prototipo es único, y fue construido con recursos asignados al proye cto. Actualmente se esta en la fase de correspondiente al estudio y selección de la parte hidráulica que será la encargada de accionar las bombas hidráulicas que impulsan al engrane central, y la flecha motriz, a través de los cuatro engranes periféricos.
Los engranes utilizados son de acero grado 2, del tipo helicoidal con 28 dientes cada uno, con un ángulo de presión de 25 grados y un ángulo de hélice de 30 grados. El diámetro de los engranes es de 3.5 pulgadas y la potencia en cada uno de los cuatro engranes periféricos, suministrada por cada bomba es de 7.71 hp. Las bombas tienen una sección
Figura 1.13 Motor híbrido mostrando las bombas hidráulicas y engranes
1.6 Planteamiento del problema
ESIME 29
Dicho proyecto ya tiene como metas logradas los cálculos del diseño de las partes, definición de los materiales, identificación de elementos manufacturados, cotización y adquisición de las piezas esenciales del prototipo así como su fabricación y construcción.
1.6 Sumario
Cuando se habla de engranes se hace necesario utilizar una serie de conceptos que deben ser bien comprendidos, por lo que, en este capítulo se hace una pequeña reseña histórica sobre la aparición de los engranes, además de dar una ligera descripción de los mismos. También se abordan conceptos útiles de la teoría de mecanismos que será necesario recordar en el presente estudio, tales como definiciones de mecanismo, armadura, eslabón, cadena cinemática, pares tipos de eslabones, movimiento y tipos de movimiento, inversión cinemática. Se define además el concepto de vibración, y los problemas típicos que esta produce en engranes.
1.7 Referencias
[1.1] Joseph Edward Shigley and John Joseph Uicker, Jr, Theory of Machines and Mechanisms First Edition (1980) McGraw Hill.
[1.2] Robert L. Norton, Desing of Machinery, First Edition (1992) McGraw Hill. [1.3] Erdman, Arthur G and Sandor, George N., Mechanis Design: Analysis and Synthesis 3rd Edition (1997) Prentice Hall.
[1.4] William T. Thomson, Teoría de las vibraciones. Segunda Edición (1982) Prentice Hall.
[1.5] R. F. Jr. Steidel, An Introduction to Mechanical Vibrations (1971) New York: Willey
ESIME 31
CAPÍTULO 2
ENGRANES
2.1 Generalidades
Los engranes sirven para transmitir par de torsión y velocidad angular en una amplia variedad de aplicaciones. Hay gran diversidad para escoger. Aquí se ocupará del engrane del tipo mas simple, el recto, diseñado para funcionar sobre flechas paralelas, con sus dientes paralelos al eje de la flecha. Otros tipos de engranes, como el helicoidal, el cual se aborda, el cónico y el tornillo sinfín, aceptan flechas no paralelas.
2.2 Variables utilizadas para engranes [2.3]
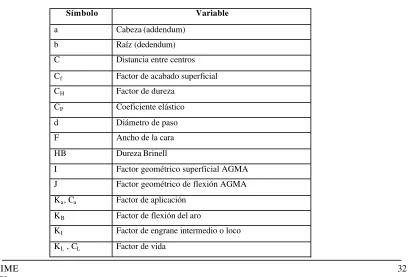
[image:59.596.99.509.470.747.2]Para los engranes se maneja una terminología especializada y es recomendable familiarizarse con ella. Las variables que se manejan se listan en la tabla 2.1
Tabla 2.1 Terminología de engranes
(Nota: Algunos de estos parámetros se explican en las siguientes secciones)
Símbolo Variable
a Cabeza (addendum)
b Raíz (dedendum)
C Distancia entre centros Cf Factor de acabado superficial CH Factor de dureza
CP Coeficiente elástico
d Diámetro de paso
F Ancho de la cara HB Dureza Brinell
I Factor geométrico superficial AGMA J Factor geométrico de flexión AGMA Ka, Ca Factor de aplicación
KB Factor de flexión del aro
KI Factor de engrane intermedio o loco
ESIME 33
Km , Cm Factor de distribución de carga
KR , CR Factor de confiabilidad
KS , CS Factor de tamaño
KT , CT Factor de temperatura Kv, Cv Factor dinámico
m Módulo
M Momento, función de momento mA Ventaja mecánica
mG Razón de engranes
mp Razón de contacto
mV Razón de velocidad angular
N Número de ciclos o número de dientes Nb , Nc Factores de seguridad a flexión o al contacto
Pb Paso básico
Pc Paso circular
Pd Paso diametral
Qv Índice de calidad del engrane
R Radio de paso
Sfb Resistencia a la fatiga por flexión corregido
S’fb Resistencia a la fatiga por flexión sin corregir
Sfc Resistencia a la fatiga superficial corregida
S’fc Resistencia a la fatiga superficial sin corregir
T Par de torsión
Vt Velocidad en la línea de paso
W Fuerza total en los dientes del engrane Wr Fuerza radial en los dientes del engrane
Wt Fuerza tangencial en los dientes del engrane
x1, x2 Coeficientes de modificación de la altura de cabeza Y Factor de forma Lewis
Z Longitud de acción
ϕ Ángulo de presión
ρ Radio de curvatura
σb Esfuerzo a flexión
σc Esfuerzo superficial
2.3 Nomenclatura de los dientes de engranes [2.2]
La figura 2.9 muestra dos dientes de un engrane que definen la nomenclatura estándar. El círculo de paso y el círculo base ya fueron definidos antes. La altura del diente se define por la altura de cabeza (addéndum) y la altura de la raíz (dedéndum), que están referidas al círculo de paso nominal. La altura de la raíz es ligeramente mayor a la altura de la cabeza, a fin de incluir una pequeña holgura entre la punta de un diente en acoplamiento (círculo de la cabeza) y la parte inferior del espacio del diente del otro (círculo de la raíz). El espesor del diente se mide del círculo de paso al ancho del espacio del diente es ligeramente superior al espesor del diente. La diferencia entre estas dos dimensiones es el huelgo. El ancho de la cara del diente se mide a lo largo del eje del engrane. El paso circular es la longitud de arco a lo largo de la circunferencia del círculo de paso, medido desde un punto en un diente hasta el mismo punto en el siguiente. El paso circular define el tamaño del diente. La definición de paso circular pc es:
pc = πd / N (2.1)
Donde d = diámetro de paso y N = número de dientes. El paso del diente también se mide a lo largo de la circunferencia del círculo base y se conoce como el paso de base pb :
pb = pc cos φ (2.2)
Las unidades de pc son pulgadas o milímetros. Una manera más práctica de definir el tamaño del diente es relacionándolo directamente con el diámetro d del circulo de paso, no con su circunferencia. El paso diametral pd es:
ESIME 35
Las unidades de pd son recíprocas de pulgadas, es decir número de dientes por pulgada. Esta medida se aplica únicamente en engranes de especificación estadounidense. Combinando las ecuaciones (2.1) y (2.2), se obtiene la razón entre el paso circular y el paso diametral.
pd = π / pc (2.4)
En el sistema SI, que se aplica en engranes métricos, se define un parámetro conocido como módulo, que es recíproco al paso diametral, con el diámetro de paso d medido en milímetros.
m = d / N (2.5)
Las unidades del módulo son milímetros. Lo malo es que los engranes métricos no son intercambiables con los engranes estadounidenses, a pesar de que ambos tienen formas de diente involutas, ya que son distintos los tamaños estándar de dientes. En Estados Unidos se especifican los tamaños de los dientes de engrane en función del paso diametral. La conversión de un estándar al otro es:
m = 25.4 / pd (2.6)
La razón de velocidades mV del engranaje se puede expresar de una forma más práctica
sustituyendo la ecuación (2.3) en la ecuación (15), observando que el paso diametral en engranes acoplados debe ser el mismo.
rentrada dentrada Nentrada
mV = +/- = +/- = +/- (2.7)
De ahí que la razón de velocidad se calcula a partir del número de dientes de engranes en acoplamiento, que son enteros. Advierta que un signo menos implica un engranaje externo y un signo más, uno interno, según se observa en las figuras (2.1) y (2.2). La razón de engranes mg se expresa como el número de dientes del engrane Ng sobre el número de dientes del piñón Np :
mg = Ng / Np (2.8)
2.4 Teoría de los dientes de engrane [2.1]
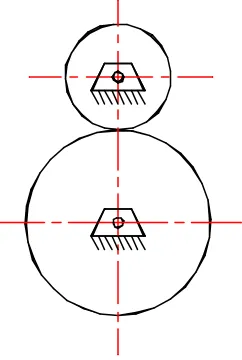
[image:63.596.229.350.430.610.2]La manera mas sencilla de transferir movimiento rotatorio de una flecha a otra es un par de cilindros en giro. Puede ser un conjunto externo de cilindros en giro, como se muestra en la figura 2.1, o un conjunto interno, como en la figura 2.2.
ESIME 37 Figura 2.2 Juego interno
Este mecanismo funciona bastante bien cuando hay suficiente fricción en la interfaz en rodamiento. No hay deslizamiento entre dos cilindros hasta que la fuerza de fricción máxima disponible en la unión se vea superada por las necesidades de transferencia de par de torsión.
Engrane Piñon
Figura 2.3 Engranaje
2.4.1 Ley fundamental de los engranes
El concepto general es que los dientes de cualquier forma evitarán deslizamientos extraordinarios. Los viejos molinos de harina impulsados por agua y los molinos de viento funcionaban con engranes de madera, cuyos dientes eran simples espigas de madera insertadas en el aro de los cilindros. Aun pasando por alto lo burdo de estos primeros ejemplos de engranaje, no había posibilidad alguna de transmisión uniforme de
la velocidad, ya que la geometría de las espigas o “dientes” violaba la ley fundamental de los engranes, que dice que la razón de la velocidad angular entre los engranes de un engranaje (o tren de engranes) debe mantenerse constante a través del acoplamiento. La razón de velocidad angular mV es igual a la razón del radio de paso del engrane de
ESIME 39
ωsalida rentrada mV = = +/- (2.9)
ωentrada rsalida
Los radios de paso de la ecuación (2.9) son los de los cilindros de rodamiento a las cuales agregamos los dientes. El signo positivo o negativo toma en consideración los conjuntos de cilindros internos o externos, según se aprecian en las figuras 2.1 y 2.2 . Un conjunto externo invierte la dirección de rotación entre cilindros, lo que requiere un signo negativo. Un engranaje interno (igual que una transmisión por banda o cadena) tendrá la misma dirección de rotación en sus flechas de entrada y de salida y requiere un signo positivo en la ecuación (2.9). La superficie de los cilindros de rodamiento se convierte en círculos de paso, y sus diámetros en diámetros de paso de los engranes. El punto de contacto entre los cilindros ocurre en la línea de centros, según se observa en la figura 2.4, y este punto se le conoce como punto de paso.
La razón de par de torsión o ventaja mecánica mA es la recíproca de la razón de
velocidades mV;
ωentrada rsalida
mA = = +/- (2.10)
ωsalida rentrada
giran. Cualquier variación en la razón se mostrará como una oscilación en la velocidad y en el par de torsión de salida, incluso si la entrada es constante a lo largo del tiempo.
Para efectos de cálculo, la razón de engranes mG se toma como la magnitud, ya sea de la
razón de velocidades o de la razón de pares de torsión cualquiera que este sea > 1
[image:67.596.183.424.310.567.2]mG = [mV ] o mG = [ mA ], para mG >/= 1 (2.11)
Figura 2.4 Contacto entre engranes
En otras palabras, la razón de engranes será siempre un número positivo >1, sin importar la dirección en que fluya la potencia a través del engranaje.
o = ángulo de presion girado en dirección del engrane impulsado a = Linea de acción (normal común) tangente a ambos circulos base
b
g = círculo de paso del piñón
ap = cabeza del piñón ag = cabeza del engrane o = punto de paso
i = radio de paso del engrane (rg) h = radio de paso del piñón (rp) f = velocidad en el punto de fase e = círculo de paso del engrane d = círculo base del engrane c = círculo base del piñón b = tangente común
d e
ag Engrane impulsado
i
o a
c g
Piñon impulsor ap
ESIME 41
A fin de que resulte cierta la ley fundamental de los engranes, en dientes acoplados los contornos del diente del engrane deben ser los conjugados uno del otro. Es posible emplear un número infinito de pares conjugados posibles, pero solo unas cuantas curvas han visto una aplicación práctica como dientes de engrane. La cicloide se aplica todavía en algunos relojes como forma de diente, pero la mayor parte de los engranes tienen como forma la involuta de una circunferencia.
2.4.2 La forma involuta en dientes
La involuta de un círculo es una curva que se genera al desenrollar una cuerda tensa en un cilindro, según se observa en la figura 2.5. Obsérvese lo siguiente:
1. La cuerda siempre es tangente al círculo base.
2. El centro de curvatura de la involuta está siempre en el punto de tangencial de la cuerda con el círculo base.
3. Una tangente a la involuta está siempre normal a la cuerda, que es el radio instantáneo de curvatura de la curva de la involuta.