INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
Unidad Profesional “Adolfo López Mateos”
ESTACIÓN DE TRABAJO ULTRA3000
T E S Í S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A
LUIS GODOY RODRÍGUEZ
AGRADECIMIENTOS
Durante estos escasos cinco años de lucha constante, de gratas vivencias, de momentos de éxitos y también de angustias y desesperanza para poder cumplir mis objetivos y así poder alcanzar uno de mis mas grandes anhelos, culminar mi carrera, los deseos de superarme y de lograr mi meta eran tan grandes que logre vencer todos los obstáculos y es por ello que debo dedicar este triunfo a quienes en todo momento me llenaron de amor y apoyo, y por sobre todo me brindaron su amistad:
Para mis padres por su comprensión y ayuda en momentos malos y menos malos. Me han enseñado a encarar las adversidades sin perder nunca la dignidad ni desfallecer en el intento. Me han dado todo lo que soy como persona, mis valores, mis principios, mi perseverancia y mi empeño, y todo ello con una gran dosis de amor y sin pedir nunca nada a cambio.
Mama no me equivoco si digo que eres la mejor mama del mundo, gracias por todo tu esfuerzo, tu apoyo y por la confianza que depositaste en mi. Gracias por qué siempre, has estado a mi lado por tu paciencia, por enseñarme el camino de la vida, por tus cuidados, gracias por tus consejos, por el amor que has dado y el apoyo incondicional en mi vida Te quiero mucho.
Papa este es un logro que quiero compartir contigo, este es el resultado de lo que me has enseñado en la vida ya que siempre has sido una persona honesta, entregada a tu trabajo, y un gran líder, pero más que todo eso una gran persona que siempre ha logrado salir adelante y ser triunfador, gracias por ser mi papa, por creer en mí. Quiero que sepas que Te quiero mucho.
A mis hermanos Ramón, Omar y Rosalía que con su amor me han enseñado a salir adelante, Gracias por su paciencia, por preocuparse por su hermano, por compartir sus vidas conmigo, pero sobre todo gracias por estar en este momento tan importante.
Tengo que agradecer especialmente a mi novia Alejandra por su amor que me ha obsequiado, su comprensión y paciencia que me dedico durante el tiempo que dedique a la realización de este trabajo, por eso y muchas cosas más, solo puedo agradecerte por todo y decirte que te amo.
A todos mis amigos, sin excluir a ninguno, mil gracias por todos los momentos que hemos pasado juntos y por que han estado conmigo siempre en las buenas y en las malas.
A mi asesor el M. en C. Juan José Muñoz Cesar, gracias por darme la oportunidad y por el tiempo que me han dedicado para realizar este trabajo su esfuerzo y dedicación. Sus conocimientos, sus orientaciones, su manera de trabajar, su persistencia, su paciencia y su motivación han sido fundamentales para mi formación.
OBJETIVO
i Objetivo
OBJETIVOS PARTICULARES
ii Objetivos Particulares
La presente tesis plantea cumplir los siguientes objetivos:
1. Mostar el equipo industrial existente, realizar un análisis a grandes rasgos de algunas marcas existentes en el mercado, comparar la oferta de productos que estas proponen que van enfocados al control de movimiento y destacar algunos criterios que se deben de tomar en cuenta para la selección del equipo.
2. Mostrar el software utilizado para la selección del equipo (Motion Analyser) por medio del análisis de movimiento (perfil de movimiento) y la selección de los componentes asociados a estos (Motion Selector).
3. Presentar las características físicas, eléctricas y ambientales del equipo que componen la estación de trabajo, respetando las limitaciones del equipo dadas por el fabricante para el diseño y construcción de la estación de trabajo, incluyendo los diagramas de conexión del equipo.
4. Explicar la operación de la estación de trabajo por medio del software Ultraware, mostrar la configuración de equipo, comunicación entre los dispositivos y la PC, modos de operación del ULTRA3000, etc.
CONTENIDO
iii Contenido
Objetivo ... i
Objetivos Particulares ... ii
Contenido ... iii
Índice de tablas ... viii
Índice de Figuras ... ix
Justificación ... xiii
Planteamiento del Problema ... xiv
Introducción ... xv
Estado del Arte ... xvi
Capítulo I Marco Teórico ... 1
1.1 Servomecanismo ... 2
1.2 Servomotor ... 3
1.2.1 Servomotores Brushless ... 4
1.2.1.1 Funcionamiento ... 4
1.3 Encoders ... 7
1.3.1 Tipos de Encoders ... 7
1.3.1.1 Incrementales ... 7
1.3.1.1.1 Salidas de los Encoders Incrementales ... 9
1.4 Fundamentos de Control de Movimiento ... 10
1.4.1 Componentes de un sistema Control de movimiento ... 10
1.4.1.1 Controlador de Movimiento ... 10
1.4.1.1.1 Control de Velocidad ... 11
1.4.1.1.2 Control de Posición ... 11
1.4.1.1.3 Perfil de Movimiento ... 13
1.4.1.1.3.1 Perfil Trapezoidal ... 13
CONTENIDO
iv
1.4.1.1.4 Calculo de trayectorias ... 15
1.4.1.2 Amplificador ... 16
1.4.1.3 Actuador ... 17
1.4.1.4 Dispositivo de realimentación ... 17
Capítulo II Selección del Equipo ... 18
2.1 Marcas Líderes ... 19
2.1.1 Allen-Bradley ... 19
2.1.2 Rockwell Software ... 19
2.1.3 Siemens ... 20
2.1.4 Mitsubishi ... 20
2.2 Servodrives Mitsubishi ... 21
2.2.1 MR-J3 Series ... 21
2.2.1.1 Funciones destacadas:... 22
2.2.2 MR-J2 Series ... 23
2.2.2.1 MR-J2S-A ... 23
2.2.2.2 MR-J2S-B ... 24
2.2.2.3 MR-J2S-CL ... 24
2.2.2.3.1 Funciones destacadas: ... 24
2.2.2.3.2 Características ... 24
2.2.3 Servomotores ... 26
2.2.3.1 Características ... 27
2.2.4 SSCNET ... 28
2.2.4.1 Características:... 29
2.3 Allen-Bradley ... 29
2.3.1 ULTRA1500 ... 29
2.3.1.1 Beneficios: ... 29
2.3.1.2 Rango de Potencia (240v AC) ... 30
2.3.2 ULTRA3000 ... 31
2.3.2.1 Beneficios ... 32
2.3.2.2 Características ... 32
2.3.2.3 Rango de Potencia ... 33
2.3.3 Ultra 5000 ... 33
2.3.3.1 Características ... 34
2.3.3.2 Rango de Potencia ... 34
2.3.4 Kinetix 2000 ... 35
2.3.4.1 Beneficios ... 35
2.3.5 Kinetix 6000 ... 36
CONTENIDO
v
2.3.5.2 Características ... 37
2.3.5.3Rango de Potencia ... 38
2.4 Servomotores ... 38
2.4.1 Serie MP ... 38
2.4.2 Serie H ... 39
2.4.3 Serie F ... 39
2.4.4 Serie Y ... 40
2.4.5 Serie N ... 41
2.5 Selección del Equipo ... 41
2.5.1 Motion Analyser ... 42
2.5.2 Motion Selector ... 49
Capítulo III Descripción del Equipo ... 53
3.1 Servodrive ULTRA3000 ... 54
3.1.1 Numero de Catalogo ... 54
3.1.2 Características ... 54
3.1.3 Especificaciones de Potencia ... 56
3.1.4 Especificaciones físicas y ambientales ... 57
3.1.5 Especificaciones de las entradas y salidas ... 58
3.1.6 Especificaciones de Comunicaciones ... 58
3.1.7 Especificaciones de retroalimentación auxiliar ... 59
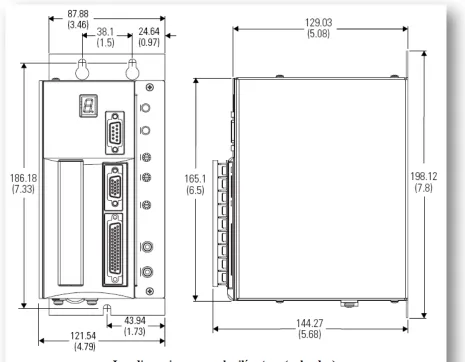
3.1.8 Dimensiones físicas ... 60
3.1.9 Conectores del Panel Frontal ... 61
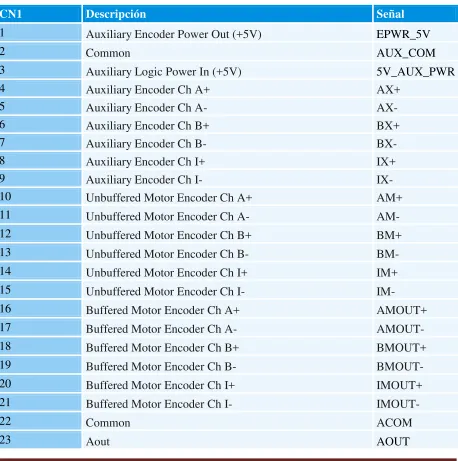
3.1.9.1 Detalle de los Conectores ... 62
3.2 Servomotor Y-2006-2-H00AA ... 64
3.2.1 Numero de Catalogo ... 64
3.2.2 Datos del Motor ... 65
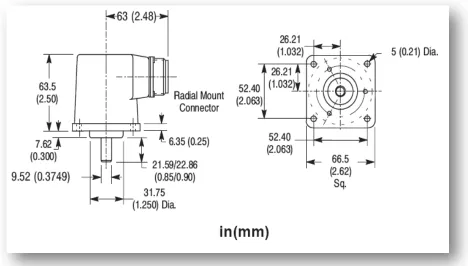
3.2.3 Dimensiones del motor ... 66
3.2.4 Detalle de los conectores ... 67
3.2.5 Especificaciones del encoder del servomotor ... 69
3.3 Encoder Auxiliar 845H-SJDZ12CTY2 ... 70
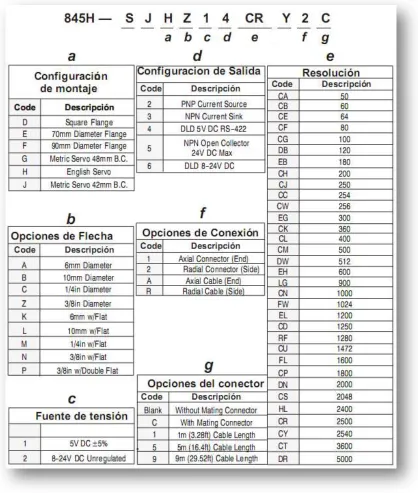
3.3.1 Numero de catalogo. ... 70
3.3.2 Especificaciones. ... 71
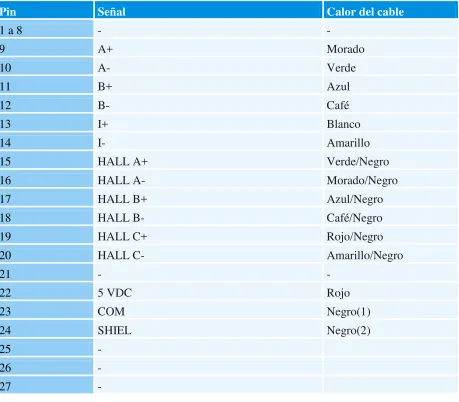
3.3.3 Conector ... 72
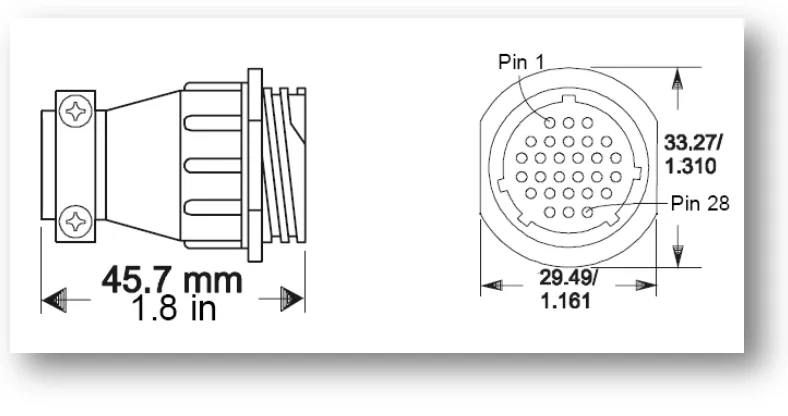
3.3.4 Dimensiones físicas ... 72
CONTENIDO
vi
3.4.1 Requerimientos del Sistema ... 74
3.5 Diseño de la Estación de trabajo ... 74
3.5.1 Diagramas de conexión ... 74
3.5.1.1 Alimentación de Servodrive ... 74
3.5.1.2 Conexión Servodrive-Servomotor ... 75
3.5.1.3 Conexión del Encoder Auxiliar ... 75
3.5.1.4 Diagrama de Entradas y Salidas ... 76
3.5.1.5 Diagrama general de conexión ... 78
3.5.2 Diseño del Maletín ... 78
3.5.2.1 Requerimientos de ventilación. ... 79
3.5.3 Estación de Trabajo ... 80
Capítulo IV Operación de la Estación de Trabajo ... 83
4.1 Conexión con la PC ... 84
4.2 Configuración inicial ... 87
4.2.1 Selección del Motor ... 87
4.2.2 Asignar Entradas Digitales ... 87
4.2.3 Sintonizar el motor ... 88
4.2.4 Configuración del Encoder Auxiliar... 89
4.2.4.1 Diagnósticos del encoder ... 90
4.2.5 Prueba del Motor ... 91
4.3 Entradas y Salidas ... 92
4.3.1 Entradas digitales ... 92
4.3.2 Entrada Analógica ... 95
4.3.3 Salidas Digitales ... 95
4.3.4 Salida Analógica ... 97
4.5 Modos de Operación ... 97
4.5.1 Modo Analog ... 98
4.5.1.1 Analog Velocity Mode ... 98
4.5.1.2 Analog Position Mode ... 100
4.5.1.3 Analog Current Mode ... 101
4.5.2 Modo Preset ... 101
4.5.2.1 Preset Velocities ... 102
4.5.2.2 Preset Current ... 103
4.5.2.3 Preset Position ... 104
4.5.3 Modo Follower ... 106
CONTENIDO
vii
4.5.3.2 Follower: Step Up/Step Down ... 108
4.5.4 Modo Indexing ... 109
4.5.4.1 Absolute ... 113
4.5.4.2 Incremental ... 114
4.5.4.3 Registration ... 114
4.5.5 Mode Homing ... 114
Capítulo V Aplicaciones Típicas ... 117
5.1 Corte a Longitud ... 118
5.2 Clasificador (desviador de carril) ... 120
5.3 Devanador de carrete ... 124
5.4 Línea de Llenado de Botellas ... 126
CONCLUSIONES ... 128
ÍNDICE DE TABLAS
viii Índice de tablas
Tabla 1-1 Dispositivos de Retroalimentación ... 17
Tabla 2-1 Características del MR-J2 ... 24
Tabla 2-2 Características de Servomotores Mitsubishi ... 27
Tabla 3-1 Especificaciones de Potencia del ULTRA3000 ... 57
Tabla 3-2 Especificaciones físicas y ambientales del ULTRA3000 ... 57
Tabla 3-3 Especificaciones de las entradas y salidas del ULTRA3000 ... 58
Tabla 3-4 Especificaciones de comunicaciones del ULTRA3000 ... 59
Tabla 3-5 Especificaciones de retroalimentación auxiliar del ULTRA3000 ... 59
Tabla 3-6 Conector CN3... 62
Tabla 3-7 Conector CN2... 62
Tabla 3-8 Conector CN1... 63
Tabla 3-9 Datos de servomotor Y-2006-2-H00AA ... 65
Tabla 3-10 Detalle del conector del Encoder ... 67
Tabla 3-11 Detalle del conector de potencia ... 68
Tabla 3-12 Especificaciones del Encoder del motor ... 69
Tabla 3-13 Especificaciones del Encoder Auxiliar ... 71
Tabla 3-14 Configuración del conector del encoder auxiliar ... 72
Tabla 4-1 Parámetros del Modo Indexing ... 111
Tabla 4-2 Status del Modo Indexing ... 112
ÍNDICE DE FIGURAS
ix Índice de Figuras
Figura 1 Arquitectura típica KINETIX xviii
Figura 2 Arquitectura típica de KINETIX con SERCOS xix
Figura 1-1 Diagrama de un Servomecanismo 3
Figura 1-2 Esquema básico de un motor Brushless 5
Figura 1-3 Formas de onda de conmutación Sinusoidal 6
Figura 1-4 Encoder Incremental 8
Figura 1-5 Representación de un disco de un Encoder Incremental 9 Figura 1-6 Salidas generadas al girar un Encoder Incremental 10 Figura 1-7 Estructura Básica de un Sistema de Control de Movimiento 11
Figura 1-8 Control típico de Velocidad PID Comercial 12
Figura 1-9 Control típico de Posición PID Comercial 12
Figura 1-10 Perfil de movimiento trapezoidal 13
Figura 1-11 Perfil de movimiento Curva-S 14
Figura 1-12 Trayectoria generada 15
Figura 1-13 AC Servo Amplificador 16
Figura 2-1 Servodrive MR-J3 Series 22
Figura 2-2 Servodrives MR-J2 Series 23
Figura 2-3 Servomotores Mitsubishi 26
Figura 2-4 Ultra1500 31
Figura 2-5 ULTRA3000 31
ÍNDICE DE FIGURAS
x
Figura 2-7 Kinetix 2000 35
Figura 2-8 Kinetix 6000 36
Figura 2-9 Servomotor MP 38
Figura 2-10 Servomotor Serie H 39
Figura 2-11 Servomotor Serie F 40
Figura 2-12 Servomotor Serie Y 40
Figura 2-13 Servomotor Serie N 41
Figura 2-14 Axis Setup en Motion Analyzer 43
Figura 2-15 Perfil de Movimiento en Motion Analyzer 44
Figura 2-16 Pestaña de Selección en Motion Analyzer 45
Figura 2-17 Soluciones de Motion Analyzer 46
Figura 2-18 Solución escogida en Motion Analyzer 47
Figura 2-19 Componentes del reporte de Motion Analyzer 48
Figura 2-20 Motion Selector 50
Figura 2-21 Listado de Accesorios de Motion Selector 51
Figura 3-1 Descripción del No. de Catalogo de ULTRA300 56
Figura 3-2 Dimensiones físicas 60
Figura 3-3 Panel Frontal 61
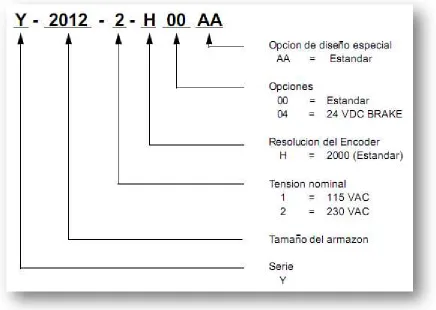
Figura 3-4 Descripción del catalogo del servomotor Y 65
Figura 3-5 Dimensiones del motor 66
Figura 3-6 Conector del encoder 68
ÍNDICE DE FIGURAS
xi
Figura 3-8 Numero de catalogo del Encoder Auxiliar 70
Figura 3-9 Dimensiones físicas del encoder auxiliar 73
Figura 3-10 Diagrama de conexión de la alimentación del ULTRA3000 75 Figura 3-11 Diagrama de conexión del ULTRA3000 con el servomotor Y 76 Figura 3-12 Diagrama de Conexión del encoder auxiliar y el ULTRA3000 77
Figura 3-13 Diagrama de Entradas y Salidas 77
Figura 3-14 Diagrama general de conexión 78
Figura 3-15 Requerimientos de ventilación del ULTRA3000 79
Figura 3-16 Diseño de la estación de trabajo 80
Figura 3-17 Diseño del panel derecho de la estación de trabajo 81
Figura 3-18 Estación de trabajo física 82
Figura 4-1 Espacio de trabajo del ULTRAWARE 84
Figura 4-2 Display 7 Segmentos del ULTRA3000 85
Figura 4-3 Driver's en línea 86
Figura 4-4 Configuración del puerto serial 86
Figura 4-5 Selección del Motor 87
Figura 4-6 Entradas Digitales 88
Figura 4-7 Sintonización del Motor 89
Figura 4-8 Configuración del Encoder 90
Figura 4-9 Resultados del Diagnostico de Comunicación del Encoder 91
Figura 4-10 Prueba del motor 92
ÍNDICE DE FIGURAS
xii
Figura 4-12 Código binario de Entradas Digitales 94
Figura 4-13 Salidas Digitales 96
Figura 4-14 Seleccionar modo de operación 98
Figura 4-15 Analog Mode 99
Figura 4-16 Selección de Preset 102
Figura 4-17 Preset Mode 103
Figura 4-18 Preset Position 105
Figura 4-19 Follower Mode 108
Figura 4-20 Modo Indexing 110
Figura 4-21 Secuencia de movimiento 113
Figura 4-22 Modo Homing 116
Figura 5-1 Corte a Longitud 118
Figura 5-2 Secuencias de movimiento para corte a longitud 119
Figura 5-3 Configuración de la salida de corte a longitud 120
Figura 5-4 Clasificador, tipo desviador de carril 121
Figura 5-5 Configuración de las entradas digitales para el Selector 122
Figura 5-6 Index de posiciones para el selector 123
Figura 5-7 Devanador de Carrete 124
Figura 5-8 relación de paso 125
Figura 5-9 Asignación de entradas digitales Devanador de Carrete 126
JUSTIFICACIÓN
xiii Justificación
PLANTEAMIENTO DEL PROBLEMA
xiv Planteamiento del Problema
En la carrera de Ingeniería en Control y Automatización no se cuenta con la suficiente información documentada referente al control de movimiento, además de que la información confiable en internet y en libros está disponible en inglés y gran parte de esta proviene de catálogos de fabricantes, lo cual hace que no sirva de marco teórico.
INTRODUCCIÓN
xv Introducción
El presente trabajo abarca que es el control de movimiento abordando conceptos, fundamentos de lo que es un servomecanismo, además de que se menciona la teoría de operación de los dispositivos presentes en la estación de trabajo, es decir, los servomotores Brushless AC, encoders incrementales, asimismo de fundamentos del control de movimiento abarcando sus componentes básicos que son: un controlador de movimiento, un amplificador, un actuador (servomotor), y una retroalimentación hacia el controlador de movimiento.
Se presenta equipo de algunos fabricantes industriales resaltando algunas características que sirven para la selección de éste, donde se muestran las herramientas que ayudaron para su selección, se destacan las dos utilizadas, las cuales son: Montion Analyzer y Montion Selector.
Se describen las características tanto eléctricas, ambientales y físicas del equipo presente en la estación de trabajo que sirve para lograr que opere de forma correcta, y dadas sus dimensiones físicas hacer posible la instalación del equipo dentro del maletín.
Se muestra la conexión del equipo hacia la PC vía cable serial con el cual se puede configurar utilizando el software Ultraware, se establece la configuración inicial del equipo para posteriormente poder asignar las funciones que van a tener las entradas y salidas, y con ello operar el servodrive en sus distintos modos de operación que son: modo Analog, Preset, Follower, Indexing y Homing.
ESTADO DEL ARTE
xvi En el área de los servodrives para las máquinas-herramientas los ciclos de la innovación son muy cortos. Los fabricantes de servodrives introducen los resultados de las investigaciones de universidades en sus productos lo más pronto posible. Además hacen sus propios esfuerzos para comprender nuevos desarrollos en productos de servodrives. Varios fabricantes de servodrives presentaron lo que se pueden llamar una nueva generación de servodrives. Las características principales de estos drives son:
Estado del Arte
Un control digital de posición, Velocidad y Corriente. Desde 1987 , cuando el primer servodrive industrial con control completamente digital fue presentado [1] , la ejecución de estos drives ha mejorado cada día más y en la actualidad es mejor que el comportamiento de los drives de control analógico [2]. Por lo tanto los servodrives de control análogo fueron remplazados completamente por los servodrives de control digital.
Un sistema de alta resolución del encoder para detectar simultáneamente la posición y velocidad proporciona una resolución de varios miles de posiciones por revolución. Interfaces Digitales como SERCOS [3], CAN, proporciona el acceso completo a todos los datos dentro del servodrive.
Tiene la posibilidad de usar un algoritmo moderno y sofisticado.
Las razones para usar un drive con control completamente digital en las aplicaciones de la industria [4], a pesar de que son significativamente más caros que los drives con control analógico, son sus grandes ventajas.
ESTADO DEL ARTE
xvii Desde que se diseño el primer servodrive completamente digital en 1987, se han mejorado mucho estos equipos, hasta hacerlos cada vez más complejos, que puedan manejar arquitecturas muy completas para poder manipular y sincronizar varios ejes.
Hoy en día hay muchas empresas que manejan una solución a sistemas de control de movimiento, como Allen-Bradley, Siemens, Mitsubishi, Sneider Electric, etc. Sin embargo no todas ofrecen la tecnología más avanzada en este rubro, podemos decir que tanto Allen-Bradley, Siemens y Mitsubishi son las que mayor desarrollo tienen en la industria. [19]
Según Mitsubishi [5] el campo de la automatización es de cambio constante. Para asegurar que sus productos satisfagan de manera efectiva las necesidades actuales de los clientes, Mitsubishi ha desarrollado productos innovadores de tecnología eléctrica y electrónica de punta.
Mitsubishi Electric dispone de una completa oferta de sistemas Servo/Motion y ofrece con ello soluciones para aplicaciones que van desde sistemas sencillos de punto a punto de un solo eje, hasta sistemas sincronizados con 96 ejes. [6]
Estas soluciones incluyen 2 series de controladores de movimiento, que son, Q/QH Series Motion Controller, QD75 Positioning Modules. Las siguientes series para Servodrives, MR-J3 Series, MR-J2-Super Series, MR-E-Super Series, MR-J2-JR Series, MR-C Series y 4 series de servomotores ,K, M, R y S Series.
Allen-Bradley ofrece soluciones para aplicaciones de Control de Movimiento como el sistema
KINETIXTM, el sistema de control de movimiento auténticamente integrado, abierto y accesible. Con el que se obtiene: [7]
Más rapidez en el desarrollo de un proyecto Reducción de costos de instalación
ESTADO DEL ARTE
xviii Mayor producción y menos paros
Toda la información disponible, trazabilidad del proceso
A nivel funcional los servodrives están conectados al Controlador de movimiento (ControLogix, CompacLogix), como si se tratase de un módulo de E/S, toda la información de los mismos es accesible de forma implícita, como se muestra en la figura 1.
Figura 1 Arquitectura típica KINETIX
ESTADO DEL ARTE
xix tiempo real y sin problemas de posibles interferencias electromagnéticas, de manera que a nivel funcional están conectados al backplane, la arquitectura típica se muestra en la figura 2. Este sistema nos aporta múltiples ventajas:
Un único controlador multidisciplina.
Elimina las conexiones entre servodrives y control. Flexibilidad total, servodrives distribuidos.
Mantenimiento rápido y fácil.
CAPÍTULO I Marco Teórico
Página 1
Capítulo I
CAPÍTULO I Marco Teórico
Página 2 1.1 Servomecanismo
Cada vez que se hable de un “Servo” siempre estará presente el término de Feedkack o Retroalimentación [8].
La realimentación es la recuperación de la información sobre el proceso que se controlado. Existen dos tipos de la realimentación - negativa y positiva.
Retroalimentación negativa, requerida para hacer que un servo trabaje correctamente [8], substrae de las órdenes dadas al servo de modo que una diferencia o error entre la salida y entrada se pueda detectar. Esta diferencia inicia una acción que causará que el error pueda acercarse a cero, es decir que la señal de retroalimentación esta en oposición con respecto a la señal de entrada.
La retroalimentación es positiva si un aumento en la señal de salida da como resultado una señal de retroalimentación que al ser mezclada con la señal de entrada causa un aumento todavía mayor de la magnitud de la señal de salida. Esto también se conoce como retroalimentación regenerativa.
Un servo o servomecanismo es un sistema que trabaja en el principio de retroalimentación negativa [8] para inducir una acción que causa que la salida se esclavice a la entrada.
Cada servo tiene dos elementos básicos. Éstos son un punto suma y un amplificador. El punto suma es simplemente un dispositivo que suma la retroalimentación negativa con la orden para generar una diferencia de error [8].
El segundo elemento es el amplificador. Este es simplemente un dispositivo de poder que toma un pequeño error y lo multiplique por un factor de amplificación. El factor amplificación es lo que normalmente es mencionado como la ganancia del sistema [8].
CAPÍTULO I Marco Teórico
Página 3 Figura 1-1 Diagrama de un Servomecanismo
1.2 Servomotor
Un Servomotor, aplicando la definición de servomecanismo, es un motor que tiene un dispositivo (Sensor) que de una señal de retroalimentación.
Los servomotores son disponibles en AC o DC. Los primeros servomotores eran generalmente DC porque el único tipo del control para las corrientes grandes que había fueron los transistores SCR durante muchos años. Cuando los transistores llegaron a ser capaz de controlar corrientes más grandes y conmutaciones de corrientes grandes a frecuencias más altas, el servomotor de AC se desarrollo más [10].
Algunos cambios que deben ser hechos a cada motor que es diseñado como un servomotor incluyen la habilidad para operar a un rango de velocidades sin sobrecalentamiento, la habilidad para operar en velocidad cero y retener el torque suficiente para tener una carga en posición y la habilidad para operar a muy de baja velocidad por largos periodos de tiempo sin sobrecalentarse.
CAPÍTULO I Marco Teórico
Página 4 1.2.1 Servomotores Brushless
Estudiaremos este tipo de motores porque el que vamos a utilizar en la estación de trabajo es un Brushless AC Servomotor.
El servomotor Brushless es diseñado para operar sin escobillas. Esto significa que la conmutación que las escobillas proporcionaban ahora debe ser suministrada electrónicamente. Estos motores son populares y ampliamente usados en la industria, especialmente en las aplicaciones como automotriz, Aeroespacial, Medicina, Automatización, etc. [11]
La propiedad característica de este tipo de motor es que en lugar de cepillos para la conmutación, ahora la conmutación se logra a través de un sistema electrónico. Los motores Brushless tienen varias ventajas, y algunas de ellas son: [11]
Respuesta dinámica alta Alta eficiencia
Larga vida de operación Operación silenciosa Alta velocidad
Alto torque contra el tamaño del motor 1.2.1.1 Funcionamiento
Los motores brushless no tienen devanados en el rotor. El porqué de esto es que aquí la parte giratoria es el imán permanente y los devanados están situados en los polos de estator.
CAPÍTULO I Marco Teórico
Página 5 Figura 1-2 Esquema básico de un motor Brushless
CAPÍTULO I Marco Teórico
Página 6 Figura 1-3 Formas de onda de conmutación Sinusoidal
Se puede observar que en la figura 1.3 no existe ninguna referencia para el nivel de voltaje de fases U, V, y W. La velocidad de un motor Brushless AC es controlada por la amplitud (nivel de Voltaje pico a pico) de la salida sinusoidal. [11]
CAPÍTULO I Marco Teórico
Página 7 1.3 Encoders
Un encoder óptico es un sensor de posición angular que permite detectar el movimiento de rotación de un eje. Se trata de un transductor que convierte una magnitud de un mecanismo, tanto posición lineal como angular a una señal digital.
El encoder estará operando en relación al eje del elemento cuya posición se desea determinar. Su fundamento viene dado por la obtención de la medida en base a la luz que traspasa una serie de discos superpuestos que codificarán la salida digital. [13]
1.3.1 Tipos de Encoders
Existen 2 tipos de encoders, estos son el Absoluto que ofrece una salida en cualquier momento y el incremental, el cual da información del estado del eje cuando se encuentre en movimiento. Por lo tanto se dividen fundamentalmente en estos dos grupos.
En la estación de trabajo, tanto el encoder del servomotor como el auxiliar son de tipo Incremental, por lo tanto únicamente se enfoca a este tipo de encoders.
1.3.1.1 Incrementales
CAPÍTULO I Marco Teórico
Página 8 Figura 1-4 Encoder Incremental
A demás de las franjas antes mencionadas, el disco cuneta con otra franja que indica cuando se ha dado una vuelta completa y que, por tanto, se ha de empezar la cuenta de nuevo. Esta marca también sirve para comenzar a contar de nuevo donde se quedo la cuenta tras una caída de la tensión.
En la figura 1-5 se muestra el diseño de un disco de un encoder incremental, donde se pueden apreciar las franjas antes mencionadas, que son la franja A, la franja B que está desfasada 90 grados y la franja Z.
CAPÍTULO I Marco Teórico
Página 9 Figura 1-5 Representación de un disco de un Encoder Incremental
1.3.1.1.1 Salidas de los Encoders Incrementales
A Unidireccionales: dan una salida y no se puede determinar el sentido de giro. Solo sirve para obtener valores absolutos. Por ejemplo, para obtener velocidades absolutas o distancias sin importar el sentido de giro.
A y B Bidireccionales: Ofrece dos salidas A y B. El sentido de giro se puede distinguir por la diferencia de fase citada anteriormente, Por ejemplo, se puede determinar una posición o velocidad de un eje que gira en ambas direcciones.
A, B y Z Bidireccional con paso por cero: Ofrece la capacidad del Bidireccional, a demás de que incluye una salida adicional (Z), para identificar cuando se ha realizado una revolución completa.
CAPÍTULO I Marco Teórico
Página 10 Figura 1-6 Salidas generadas al girar un Encoder Incremental
1.4 Fundamentos de Control de Movimiento
El propósito de un sistema de control de movimiento es controlar alguna o la combinación de las siguientes variables:
Posición Velocidad Aceleración Torque
1.4.1 Componentes de un sistema Control de movimiento
Los componentes básicos de un sistema de Control de Movimiento como se muestran en la figura 1-7 son: un Controlador de movimiento, un Amplificador, un Actuador y una Retroalimentación hacia el controlador de movimiento. [14]
1.4.1.1 Controlador de Movimiento
CAPÍTULO I Marco Teórico
Página 11 Figura 1-7 Estructura Básica de un Sistema de Control de Movimiento
El controlador de movimiento usa generalmente lazos de control PID, porque esto requiere un alto nivel determinismo y es vital para una operación consistente.
1.4.1.1.1 Control de Velocidad
Un control típico de velocidad PID comercial se muestra en la figura 1-8, donde se observa el diagrama a bloques, es tan “simple” como un controlador “PID”, donde la entrada de referencia es un valor de velocidad “Velocity Request” que se calcula cada n milésimas de segundo, recibe el valor real de velocidad a través del encoder “Velocity Feddback” y tomando en cuenta la acción del PID, así como de los otros lazos de Feed Forward a su salida genera el valor de referencia para el servoaccionamiento.
1.4.1.1.2 Control de Posición
CAPÍTULO I Marco Teórico
Página 12 Figura 1-8 Control típico de Velocidad PID Comercial
CAPÍTULO I Marco Teórico
Página 13 1.4.1.1.3 Perfil de Movimiento
El movimiento de los objetos móviles se puede especificar por varios parámetros, que define en conjunto el perfil de movimiento. Estos parámetros son:
Velocidad (Speed): El índice del cambio de la posición
Aceleración (Acceleration): El índice del cambio de la velocidad durante un aumento de la velocidad.
Desaceleración (Deceleration): El índice del cambio de la velocidad durante una disminución de la velocidad.
Tirón (Jerk): El índice del cambio de aceleración o desaceleración
Existen muchos perfiles de movimiento, como: lineal, rampa, trapezoidal, Sinusoidal, Cubica, Curva-S, etc., sin embargo los más utilizados por los controladores de movimiento son el trapezoidal y la curva S [15].
1.4.1.1.3.1 Perfil Trapezoidal
Un perfil trapezoidal es típicamente compuesto de tres secciones, una fase de aceleración, una fase de velocidad constante y una fase de desaceleración.
CAPÍTULO I Marco Teórico
Página 14 Como se muestra en la figura 1-10, en la primera parte la velocidad aumenta definida por el índice de aceleración hasta alcanzar la velocidad objetivo, la velocidad entonces permanecerá constante hasta el punto de reducción de la velocidad, donde la velocidad disminuirá entonces definida por el índice de desaceleración hasta parar. [16]
1.4.1.1.3.2 Perfil Curva-S
Un perfil de curva-s puede ser considerado como un agregado del perfil trapezoidal. Este típicamente está compuesto de siete secciones, cuatro fases de jerk (tirón), una fase de aceleración, una fase de velocidad constante y una fase de desaceleración.
En la figura 1-11 se observan las 7 fases, las áreas sombreadas representan un Jerk, es decir que ante un cambio de fase del perfil trapezoidal este cambio es suavizado con una curva, las fases que no están sombreadas trabajan idénticamente al perfil trapezoidal, es decir las fase de aceleración hasta la velocidad objetivo, la fase de velocidad constante y la fase de desaceleración hasta cero. [16]
CAPÍTULO I Marco Teórico
Página 15 1.4.1.1.4 Calculo de trayectorias
La trayectoria de movimiento describe el comando o señal de salida del controlador de movimiento hacia el Driver / Amplificador, resultando en una acción de motor/movimiento que sigue el perfil de movimiento. El controlador típico de movimiento calcula la trayectoria de movimiento basándose en el perfil de movimiento. El controlador de movimiento usa los valores de posición objetivo deseada, velocidad objetivo máxima, la aceleración y desaceleración para determinar los tiempos dedicados hacia los segmentos primarios de movimiento (que incluyen aceleración, velocidad constante y desaceleración).
Por ejemplo si se tienen los siguientes valores de movimiento: Velocidad = 8 RPM
Aceleración = 16 RPM/s2 Desaceleración = 16 RPM/s2 Distancia = 12 Rev.
La trayectoria que genera un controlador de movimiento se muestra en la siguiente figura.
CAPÍTULO I Marco Teórico
Página 16 1.4.1.2 Amplificador
El amplificador del motor o drive es la parte del sistema que toma los comandos del controlador de movimiento en la forma de señales analógicas de voltaje con baja corriente y las convierten en señales con corrientes altas para controlar el motor.
En este caso, las señales con corrientes altas para controlar el Servomotor Brushless AC, son las señales de conmutación de las fases U, V y W, y como se menciono con amplitud de estas varía la velocidad del rotor.
Algunos de los fabricantes industriales, integran el Amplificador y controlador de movimiento en un mismo dispositivo, como es el caso del ULTRA3000.
El amplificador para motores trifásicos AC incluyen un circuito de modulación de ancho de pulso (PWM) para voltaje, corriente, y control de frecuencia. La figura 1-13 muestra un ejemplo de este tipo del amplificador proporcionado por Parker Compumotor Division, este es exclusivo para uso de un servomotor brushless AC con perfil trapezoidal. [10]
CAPÍTULO I Marco Teórico
Página 17 1.4.1.3 Actuador
Generalmente son motores rotativos o lineales, los motores convierten la energía eléctrica en energía mecánica, existen varios tipos de motores, como motores a pasos, motores brushser, brushless, etc. Para este trabajo el que se utilizo fue un servomotor brushless AC el cual ya se describió anteriormente.
1.4.1.4 Dispositivo de realimentación
El dispositivo de retroalimentación, es el sensor que esta acoplado al actuador, y dependiendo de las variables de movimiento que se deseen controlar se utiliza el dispositivo más adecuado, en la tabla 1-1 se muestran algunos dispositivos usados para medir las variables fundamentales del control de movimiento. [17] [18]
Tabla 1-1 Dispositivos de Retroalimentación Retroalimentación Dispositivo
Corriente Sensor de Efecto Hall
Aceleración Encoder, Resolver o sensor especifico de aceleración Velocidad Encoder, Resolver o tacómetro
CAPÍTULO II Selección del Equipo
Página 18
Capítulo II
CAPÍTULO II Selección del Equipo
Página 19 2.1 Marcas Líderes
En sistemas de control, la marca Allen Bradley de los Estados Unidos es uno de los líderes de mercado [19], junto con marcas como Siemens, Mitsubishi, Schneider Electric que también son líderes ya que cuentan con buena reputación y son muy conocidos en los mercados locales e internacionales.
2.1.1 Allen-Bradley
Rockwell Automation ofrece soluciones del Programa Complete Automation con marcas reconocidas que cuentan con el aval de la fidelidad de sus clientes año tras año. Sus líneas de productos globales suman un total de 500,000 productos que cubren las principales tecnologías que se necesitan para introducir soluciones de automatización prácticamente en cualquier tipo de industria. [20]
La marca Allen-Bradley tiene un gran renombre porque ofrece una fiabilidad superior para control industrial y productos de automatización, entre los que se incluyen: sistemas de E/S y controladores, dispositivos de interface de operador, computadoras industriales, relés, bloques de terminales, botones pulsadores, sensores, arrancadores, contactores, variadores, sistemas de control de movimiento, productos de comunicación en red y dispositivos de monitorización de calidad de la alimentación eléctrica. [20]
2.1.2 Rockwell Software
CAPÍTULO II Selección del Equipo
Página 20 2.1.3 Siemens
Siemens Industria División Automatización (Núremberg), división del Sector Industrial de Siemens, es líder mundial en los campos de la automatización de sistemas, interruptores de bajo voltaje y software industrial. Su catálogo abarca desde productos para la industria de la fabricación y los procesos hasta la totalidad de soluciones para industrias y sistemas que rodean la automatización completa de instalaciones de producción automovilística y plantas químicas. Como líder en distribución de software, Industry Automation optimiza la totalidad de la cadena de valor añadido de fabricantes, desde el diseño del producto y el desarrollo hasta la producción, las ventas y un amplio abanico de servicios de mantenimiento.[21]
2.1.4 Mitsubishi
Según Mitsubishi [22] el campo de la automatización es de cambio constante. Para asegurar que sus productos satisfagan de manera efectiva las necesidades actuales de los clientes, Mitsubishi ha desarrollado productos innovadores de tecnología eléctrica y electrónica de punta.
En sus centros de manufactura se desarrollan productos con la más alta calidad, estos equipos son considerados como los más innovadores de la industria. Por ejemplo, uno de cada 3 PLC's instalados en el mundo es Mitsubishi, incluso algunas compañías fabricantes de equipo emplean tecnología de control de potencia de Mitsubishi, como es el caso en los variadores de velocidad (inversores).
CAPÍTULO II Selección del Equipo
Página 21 2.2 Servodrives Mitsubishi
Mitsubishi Electric dispone de una completa oferta de sistemas Servo/Motion y ofrece con ello soluciones para aplicaciones que van desde sistemas sencillos de punto a punto de un solo eje, hasta sistemas sincronizados con 96 ejes. [22]
Mitsubishi ofrece los siguientes servodrives:
2.2.1 MR-J3 Series
La nueva generación Servo MR-J3 ofrece la más moderna técnica en combinación con un manejo sencillo en una forma constructiva muy compacta. Funciones de nuevo desarrollo, tales como la avanzada supresión de vibraciones o el aún más mejorado autotuning a tiempo real, procuran la máxima precisión, breves tiempos de posicionamiento y una sencilla puesta en servicio. En comparación con la serie MR-J2-Super, los amplificadores son un 40 % más pequeños, en la figura 2-1 se muestra este servodrive.
La serie MR-J3 está disponible en dos versiones: Los dispositivos del tipo MR-J3-A son apropiados para sistemas de operación con un control convencional y han sido diseñados para la regulación de revoluciones, de momento de giro y de regulación de posición. La serie MR-J3-B ha sido desarrollada especialmente para secuencias de movimientos complejas de varios ejes y ha sido optimizada para su empleo en grupos de automatización.
CAPÍTULO II Selección del Equipo
Página 22 Figura 2-1 Servodrive MR-J3 Series
2.2.1.1 Funciones destacadas:
Tiempos de posicionamiento mínimos gracias a rápidos reguladores; frecuencia media 900 Hz
Máxima estabilidad de revoluciones mediante alta resolución de encoder (18 bit 262144 P/rev)
Óptima adaptación a la máquina gracias a un procedimiento avanzado de supresión de vibraciones
Rapidísima puesta en servicio gracias a autotuning Óptima relación calidad/precio
Transductor de valor absoluto como estándar
Mínima necesidad de cableado mediante tecnología plug & play e identificación automática de motor
CAPÍTULO II Selección del Equipo
Página 23 2.2.2 MR-J2 Series
Mitsubishi ofrece servoamplificadores en muchos modelos diferentes. La pluralidad de las posibles aplicaciones abre un gran campo de nuevas posibilidades de aplicación. Siempre hay un servoamplificador disponible, ya sea que la excitación se realice por medio de pulsos digitales tradicionales, mediante señales analógicas o mediante SSCNET.
Todos los modelos de la Súper Serie MR-J2 dominan el autotuning a tiempo real, que supervisa permanentemente los factores de amplificación y los adapta a las condiciones actuales. Para que quede garantizada una adaptación automática y continua de los parámetros de regulación para toda la gama de aplicaciones, también para aplicaciones con cargas suspendidas o altas pérdidas por fricción, en la figura 2-2 se muestra este servodrive. [24]
Figura 2-2 Servodrives MR-J2 Series 2.2.2.1 MR-J2S-A
CAPÍTULO II Selección del Equipo
Página 24 2.2.2.2 MR-J2S-B
Los servoamplificadores MR-J2S-B han sido diseñados de forma óptima para soluciones de control y de sincronización de varios ejes en combinación con los controles modulares de Mitsubishi Electric. La interconexión de Motion Controller y el servoamplificador se lleva a cabo mediante la SSCNET.
2.2.2.3 MR-J2S-CL
Los MR-J2S-CL son accionamientos programables que ofrecen una solución servo económica y compacta con un control integrado de posicionamiento.
2.2.2.3.1 Funciones destacadas:
Autotuning a tiempo real Diseño compacto
Comunicación a través de RS232/RS485 Reconocimiento automático del motor Diversos tipos de regulación (MR-J2S-A)
Función integrada de posicionamiento (MR-J2S-CL) Hay disponibles 4 tipos de motor diferentes
2.2.2.3.2 Características
La siguiente tabla muestra algunas características más importantes de los 3 tipos de estos servodrives.
Tabla 2-1 Características del MR-J2
Tipo MR-J2S-A MR-J2S-B MR-J2S-CL
CAPÍTULO II Selección del Equipo
Página 25 Momento de giro
nominal [Nm] 0,16 - 33,4
Momento de giro
máx. [Nm] 0,48 - 100
Momento de inercia
[kg cm²] 0,019 - 160
Características especiales
2 entradas analógicas de valor nominal
Red SSC "plug and play"
16 programas con hasta 120 pasos
1 entrada de tren de pasos
Excitación del freno directamente por parte del amplificador
Entrada analógica para override
7 revoluciones fijas Salidas de encoder simuladas para la conexión de accionamientos subsiguientes convencionales
Entrada analógica para limitación de par de giro
Procesamiento de tres tipos de señales de trenes de pulsos: señales de encoder, pulso y dirección, tren de pulsos para giro a la derecha y a la izquierda
Sencillo intercambio de amplificadores mediante la administración de parámetros en el control
jerárquicamente superior
Salidas de encoder simuladas para la conexión de accionamientos subsiguientes convencionales Reconocimiento automático de
posición por parte del sistema absoluto después de la conexión como estándar (batería tampón opcional)
Conexión para generador de pulsos manual
CAPÍTULO II Selección del Equipo
Página 26 2.2.3 Servomotores
Los servomotores de Mitsubishi Electric son los más compactos del mercado gracias al empleo de modernas técnicas de bobinado que permiten reducir el volumen y al empleo de las más modernas tecnologías, en la figura 2-3 se muestran algunos servomotores de Mitsubishi. [25]
Los servomotores de Mitsubishi satisfacen las exigencias más severas y ofrecen un amplio espectro de funciones. Con diversas velocidades y momentos de inercia, los motores resultan apropiados para todas las aplicaciones. Los nuevos motores de la serie Servo-Super completan la paleta de productos de Mitsubishi Electric con gamas de potencia entre 50 W y 55 Kw y con motores especiales.
Figura 2-3 Servomotores Mitsubishi
CAPÍTULO II Selección del Equipo
Página 27
permiten el acceso permanente a la posición actual del servomotor, también en caso de una interrupción de las conexiones del sistema. [25]
2.2.3.1 Características
La siguiente tabla muestra algunas de las características más importantes de las familias de los servomotores Mitsubishi.
Tabla 2-2 Características de Servomotores Mitsubishi
Tipo Características Ejemplos de aplicación
K
Tipo de motor K Cintas de transporte
(0,16 ~ 2,4 Nm)
Máquinas de la industria alimentaria
Momento de inercia reducido para aplicaciones con una rigidez reducida del ramal de accionamiento.
Máquina impresoras
Pequeñas estaciones de carga y de descarga
Robots pequeños y aparatos de montaje
Pequeñas mesas X-Y Pequeños avances de rollos
M
Tipo de motor MMáquinas de inserción de componentes sobre circuitos impresos, dispositivos de montaje, autómatas de soldadura
(0,16 ~ 2,4 Nm)
CAPÍTULO II Selección del Equipo
Página 28 Momento de inercia mínimo
para tareas de posicionamiento con tiempos de ciclo particularmente breves.
Máquinas de control de platinas
Máquinas etiquetadoras
Máquinas tricotadoras y bordadoras
Robots ultra compactos
S
Tipo de motor S Cintas de transporte
(2,4 ~ 33,4 Nm) Máquinas especiales
Momento de inercia medio para aplicaciones con un amplio espectro de revoluciones.
Robots
Dispositivos de carga y de descarga
Bobinadoras y controladores de tiro
Cambiadores de herramientas
Mesas X-Y
Dispositivos de comprobación
R
Tipo de motor R Avances de rollos
(3,18 ~ 15,8 Nm) Estaciones de carga y de descarga
Modelo compacto con momento de inercia muy reducido. Muy apropiado para tiempos breves de ciclo.
Máquinas para sistemas de transporte con los tiempos de ciclo más breves
2.2.4 SSCNET
CAPÍTULO II Selección del Equipo
Página 29 conexión es extremadamente fiable. Los bornes de salida de encoder exteriores permiten la máxima flexibilidad para una sencilla integración del sistema. [25]
La comunicación a través del bus SSCNET permite durante el funcionamiento un acceso permanente a todos los parámetros y datos de funcionamiento por parte del control.
2.2.4.1 Características:
A medida para Motion Control Tecnología "plug and play"
La totalidad del sistema puede configurarse y ponerse en funcionamiento con facilidad. Los datos del servoamplificador y del servomotor son transmitidos automáticamente al control.
Los ajustes del servoamplificador pueden modificarse directamente por el control. 2.3 Allen-Bradley
Allen-Bradley ofrece una gran variedad de productos para soluciones de control de movimiento. En lo que se refiere a Servodrives, ofrece las familias Ultra y Kinetix, a continuación se describes algunas características de estos servodrives.
2.3.1 ULTRA1500
El Allen-Bradley Ultra™ 1500 proporciona características de fácil uso y una excelente ejecución para el manejo efectivo de una gran gama de aplicaciones de control de movimiento de eje sencillos, la figura 2-4 muestra este tipo de servodrive.
2.3.1.1 Beneficios:
Fácil uso
Fácil configuración con Ultraware.
CAPÍTULO II Selección del Equipo
Página 30
Auto Identificación del tipo motor para una operación plug and play
Auto tuning durante la configuración
Memoria Flash programable para actualizaciones fáciles del firmware
Compacto
Tamaño pequeño proporcionando mayor flexibilidad para el diseño de máquina.
Los tamaños que proceden los motores con un rango de 46 mm a 115 mm Rentable
Los diagnósticos avanzados ahorran tiempo y dinero en arranque y localización de problemas
Debido al tamaño compacto, el Ultra1500 da a los diseñadores de máquinas mayor flexibilidad
Tiempo de cableado eléctrico y costes son reducidos con un dispositivo de realimentación simplificado
Mayor precisión de máquina y rendimiento con las características del sistema que incluye:
Un ancho de banda excelente de velocidad de 550 Hz La realimentación absoluta de alta resolución
No requiere hardware adicional
Respaldado por Rockwell Automation's global support Características del Drive
Algoritmo de supresión de vibración mecánica
Capacidad de frenado dinámico reduciendo el tiempo para parar
Algoritmo para Tunning adaptable 2.3.1.2 Rango de Potencia (240v AC)
Potencia de salida continua [400w - 4.0kW]
CAPÍTULO II Selección del Equipo
Página 31
Corriente pico de salida (0-peak) [3.4 - 43.4 Amps]
Figura 2-4 Ultra1500 2.3.2 ULTRA3000
La familia Ultra™ 3000 proporciona una solución global por su conjunto completo de productos enfilando a aplicaciones de indexación de autónomas simples para multi-ejes de movimiento integrado. Rango de 110V a 460V de potencia de entrada, estos servodrives digitales de alto desempeño, encuentran las necesidades de voltaje globales y proporcionan flexibilidad para ejecutarse en una variedad de las arquitecturas de control de máquinas. Además, el drive Ultra3000 se puede integrar con la plataforma de ControlLogix por la vía de la interfaz SERCOS o DeviceNet para el movimiento integrado, en la figura 2-5 se muestra el ULTRA3000.
CAPÍTULO II Selección del Equipo
Página 32 La familia Ultra3000 tiene corriente disponible des 7.5A a 159A de corriente pico en la plataforma de 230V y de 14A a 94ª de corriente pico en la plataforma de 460V. Adicionalmente, todos los tamaños de poder son disponibles con indexado, interfaz SERCOS y opciones de red de DeviceNet.
2.3.2.1 Beneficios
El Ultra3000 proporciona una integración simple en una arquitectura de control de maquinas. Acepta valores analógicos de 0 10V, paso/dirección y seguidor maestro, manda comandos conjuntamente con interfaz SERCOS o conectividad de DeviceNet a través de la familia entera Ultra3000.
El enlace de SERCOS proporciona la integración transparente en la plataforma de ControlLogix para multi-ejes. RSLogix 5000 es el único programa requerido por ambos, secuencial y control de movimiento.
Las combinaciones perfeccionadas de motor/driver son disponibles por cada aplicación. El Ultra3000 puede funcionar con una variedad de brushless servo motors, incluyendo de Allen-Bradley, la series Y-, LD-, N-, H-, F-, y W- y 1326AB servomotores lineales.
El Ultra3000 soporta encoders de alta resolución.
El software Ultraware es un poderoso comisionando y herramienta de diagnóstico diseñada para aumentar la productividad y perfeccionar la ejecución de un sistema rápido y fácil.
El Ultra3000 puede reducir costos de componentes. Al usar el Ultra3000i's se puede hacer un indexado de puntos eliminando la necesidad de un controlador de movimiento o tarjeta de PLC para punto a punto.
2.3.2.2 Características
CAPÍTULO II Selección del Equipo
Página 33 Capacidad de corriente pico de 7.5A a 150ª
Actualización del firmware
Display de siete segmentos para códigos de estatus y error Ocho entradas de uso general selectas
Cuatro salidas de uso general y salida de relay El puerto de serial para comunicaciones RS-232/485 2.3.2.3 Rango de Potencia
230v AC 460v AC
Potencia de salida continua [0.5 Kw – 15 Kw] [3 Kw – 22 Kw] Corriente de salida continua [2.5 - 65 Amps] [7 - 47 Amps] Corriente pico de salida (0-peak) [7.5 - 150 Amps] [14 - 94 Amps] 2.3.3 Ultra 5000
El Ultra5000™ posicionamiento inteligente es una de las últimas adiciones a la serie popular ULTRA de los servodrives digitales, en la figura 2-6 se muestra el ULTRA5000.
CAPÍTULO II Selección del Equipo
Página 34 El Ultra5000 es alto desempeño, compacto, combina ejecución y flexibilidad para satisfacer las más avanzadas aplicaciones de movimiento. El Ultra5000 se sitúa en una posición estratégicamente conveniente para aplicaciones de ejes sencillos por su DSP de procesamiento de alta velocidad, el lenguaje de programación C de ANSI estándar. El Ultra5000 proporciona un alto desempeño y un costo efectivo para el control de movimiento inteligente de un solo eje.
2.3.3.1 Características
El controlador completamente programable para proporcionar funciones avanzadas de control de movimiento a cualquier aplicación de eje sencillo.
Los programas de control de movimiento se crean en formato c de ANSI para una rápida codificación y ejecución, y programas compactos.
Capacidades de matemáticas avanzadas para los más exigentes cálculos de aplicación. Tiene arquitecturas de poder de fidelidad
El usuario diseña el programa en el formato c de ANSI, e incluye la flexibilidad de conjuntos, estructuras y bibliotecas.
Flexible, propósito general digital, salidas y entradas analógicas para satisfacer las aplicaciones de control de movimiento de coste-sensitivo con un paquete integrado sencillo.
Capacidades de realimentación avanzadas incluyendo encoders absolutos y de alta resolución
Conexión directa hacia una interfaz de operación PanelView para una solución de automatización completa.
2.3.3.2 Rango de Potencia
230v AC 460v AC
CAPÍTULO II Selección del Equipo
Página 35 Corriente pico de salida (0-peak) [7.5 - 150 Amps] [14 - 94 Amps]
2.3.4 Kinetix 2000
Este servodrive multi-ejes proporciona la simplicidad, permite ahorrar tiempo y dinero de cableado eléctrico inicial y programación de operación y diagnósticos. Con una corriente de salida continua (rms) de 1.0 a 9.5 As, el Kinetix 2000 ofrece un diseño compacto, conjuntamente con las series de TL y MP, el Kinetix 2000 es ideal para las aplicaciones pequeñas y enfocadas a mejorar la productividad, calidad y tiempo de producción, en la siguiente figura se muestra el Kinetix 2000.
Figura 2-7 Kinetix 2000 2.3.4.1 Beneficios
Las conexiones de tendido eléctrico toman menos tiempo con:
SERCOS interface™. un sencillo enlace digital de fibra óptica elimina hasta 18 alambres discretos por el eje.
Un sencillo riel de poder reemplaza el tendido eléctrico de poder. Diseño de sistema compacto
CAPÍTULO II Selección del Equipo
Página 36 Ejecución excepcional
Las capacidades de control avanzadas proporcionan mayor precisión y rendimiento. Ahorros de costo
El diseño del módulo reduce los costos de cableado eléctrico reduciendo el número total de conexiones
El tamaño compacto se traduce en mayor flexibilidad para el diseño de la maquina y más producción en la misma cantidad de espacio de piso
Los servomotores de Kinetix usan la tecnología Smart Motor para proporcionar la identificación automática al conectarlos reduciendo el tiempo de comisión.
2.3.5 Kinetix 6000
El Kinetix™ 6000 servodrive multi-ejes combina avanzada capacidad de control con las características de diseño innovadoras para mejorar significativamente la ejecución del sistema mientras se ahorra tiempo y dinero, en la siguiente figura se muestra el Kinetix 6000.
CAPÍTULO II Selección del Equipo
Página 37 Diseñado para hacer tendido eléctrico, programación, operación y diagnósticos más rápido y fácil, el Kinetix 6000 puede disminuir OEM diseñado y tiempo de instalación mientras se añade flexibilidad para las aplicaciones de movimiento. Además, el Kinetix 6000 tiene un tamaño compacto para permitir la colocación eficaz en la maquinaria. El tamaño de módulo más pequeño es hasta un 50% más pequeño que otros drives de la competencia. El Kinetix 6000 encuentra las necesidades de control de movimiento a nivel mundial manejando todos los voltajes globales.
2.3.5.1 Beneficios
El tamaño compacto se traduce en mayor flexibilidad para el diseño de la maquina y más producción en la misma cantidad de espacio de piso
Las capacidades de control avanzadas proporcionan mayor precisión y rendimiento Una interfaz SERCOS™ proporciona la integración en la plataforma de ControlLogix para multi-ejes. RSLogix 5000 es el único programa requerido para el control del controlador de movimiento (ControLogix) y el servodrive (Kinetix 6000).
SERCOS interface™. un sencillo enlace digital de fibra óptica elimina hasta 18 alambres discretos por el eje.
Todos los conectores son desmontables
Kinetix 6000 es diseñado para de trabajo con una amplia gama de motores con varias opciones de realimentación para proporcionar la combinación ideal de ejecución y eficacia de coste para su aplicación.
2.3.5.2 Características
Tres LED y un display de 7-segmente proporciona información del eje y aviso de errores El carril de poder es disponible en varios tamaños para acomodar 1, 2, 3, 4, 5, 6, 7 u 8 ejes.
CAPÍTULO II Selección del Equipo
Página 38 2.3.5.3Rango de Potencia
230v AC 460v AC
Potencia de salida continua [1.2 Kw – 1 Kw] [1.8 Kw – 22 Kw] Corriente de salida continua [5.2 - 48.9 Amps] [4 – 48.9 Amps] Corriente pico de salida (0-peak) [10.5 – 73.4 Amps] [5.9 – 73.4 Amps] 2.4 Servomotores
2.4.1 Serie MP
La serie MP ofrece un nuevo diseño que reduce el tamaño del motor y proporciona un par significativamente más alto. Un diseño de estator de núcleo segmentado, administración térmica mejorada así como múltiples configuraciones electrónicas disponibles crean un motor que ofrece óptimas funciones de rendimiento. Los conectores de motor fácilmente reversibles y diversas opciones de retroalimentación, incluso la resolución absoluta y alta, mejoran la versatilidad y capacidades del motor de serie MP, en la siguiente figura se muestra esta serie.
Figura 2-9 Servomotor MP
CAPÍTULO II Selección del Equipo
Página 39 líneas de alto rendimiento que produce 8,000 conteos por revolución para lograr una retroalimentación de posición precisa
2.4.2 Serie H
Los motores de serie H proporcionan baja inercia y alta aceleración. Los motores de serie H están disponibles en cinco tamaños de estructura y ofrecen un rango de par continuo desde 5 hasta 450 lb-pulg. (0.5 hasta 50 Nm) y velocidades de hasta 6,000 rpm. Los motores de serie H cuentan con un encoder incremental óptico de 2,000 líneas con la opción de 5,000 líneas para ofrecer un rendimiento extraordinario de baja velocidad con la familia Ultra, en la siguiente figura se muestra esta serie.
Figura 2-10 Servomotor Serie H 2.4.3 Serie F
CAPÍTULO II Selección del Equipo
Página 40 Figura 2-11 Servomotor Serie F
2.4.4 Serie Y
Los motores de serie Y disponibles con bobinados de 115 V ó 230 V usan un imán de neodimio de alta energía, el cual proporciona inercias bajas para aceleración rápida. Los motores de serie Y están disponibles en tres populares tamaños métricos de estructura y ofrecen un rango de paro continuo desde 1.5 hasta 22 lb-pulg. (17 hasta 2.5 Nm) y velocidades de hasta 4,500 rpm. Las relaciones excelentes de par/tamaño hacen la serie Y sea una combinación potente con los variadores de la familia Ultra, en la siguiente figura se muestra esta serie.
CAPÍTULO II Selección del Equipo
Página 41 2.4.5 Serie N
Los motores de serie N usan una estructura de rotor de imán de anillo de alta energía para ofrecer una relación extraordinaria de par/tamaño. Los motores de la serie N están disponibles en cuatro tamaños comunes de estructura de estilo NEMA y, cuando se combinan con un variador de la familia Ultra, ofrecen una alternativa de alto rendimiento a los sistemas de motor paso a paso. Cuentan con un rango de par continuo desde 1.6 hasta 47 lb-pulg. (0.18 hasta 5.3 Nm) y velocidades de hasta 7,000 rpm, en la siguiente figura se muestra esta serie.
Figura 2-13 Servomotor Serie N 2.5 Selección del Equipo
Para la creación de la estación de trabajo se necesita primero seleccionar el Servodrive, ya que a partir de este elemento se van a seleccionar los demás elementos, las necesidades que se necesitan en el Servodrive son las siguientes:
Controlar un Servomotor
Controlar el servomotor independientemente, es decir que no se necesite nada más para poder controlar el servomotor
CAPÍTULO II Selección del Equipo
Página 42 Entrada para un Encoders auxiliar, para funciones de seguimiento, engranaje electrónico, etc.
Entradas Digitales y Analógicas Salidas Digitales y Analógicas Programar secuencias de movimiento
Basándose en estas características y de acuerdo a los servodrives descritos anteriormente, un ULTRA3000 de Allen-Bradley o un MR-J2S-B de Mitsubishi cumplen con las necesidades descritas previamente y son compatibles con una amplia variedad de servomotores también descritos anteriormente, ya que un sistema Kinetix de Allen-Bradley o MR-J3 de Mitsubishi son drives diseñados para multi-ejes, es decir para controlar y sincronizar varios ejes de movimiento y resultaría una opción más cara y compleja, además un ULTRA1500 de Allen-Bradley solo es para un solo eje.
Basándose en que Allen-Bradley es una marca líder en soluciones de control de movimiento, y que tiene tecnología de punta en este rubro, se selecciono el ULTRA3000 como el servodrive para construir la estación de trabajo.
Una vez seleccionada la familia del servodrive, que es la ULTRA3000, para seleccionar exactamente cual se necesita, además del servomotor, y de los accesorios para la conexión de los mismos, se utilizo una serie de herramientas de Rockwell Software para seleccionar correctamente los dispositivos, estas herramientas son, Motion Analyzer y Motion Selector, a continuación se describe la forma en la que se seleccionaron los dispositivos para la estación de trabajo.
2.5.1 Motion Analyser
CAPÍTULO II Selección del Equipo
Página 43 propios de cada aplicación, es decir características físicas, eléctricas, ambientales, etc., en la que se vaya a utilizar el equipo.
Una vez que se empieza a trabajar con el Motion Analyzer, en primera se pide la familia de servodrives que se va a utilizar y cuantos ejes se van a controlar, en este caso, es decir para la estación de trabajo, la familia ULTRA3000 y se va a controlar un solo eje.
Después hay que configurar los siguientes parámetros como se muestra en la figura 2-14, el tipo de carga es rotacional, la selección de voltaje el AC a una fase, 115V, con +-10% de tolerancia, el parámetro del motor es suficiente una temperatura ambiente máxima de 40° parea la ciudad de México, y no se necesita freno, ya que en la estación de trabajo, el motor no se va a conectar a ninguna carga considerable.
CAPÍTULO II Selección del Equipo
Página 44 Para el Perfil de movimiento, se selecciono un distancia de 2000 rev, en un tiempo de 60 s., con un tiempo de aceleración y desaceleración 20 s, ya que no se necesita algo especial en este sentido, es decir que no se necesita un motor muy rápido, ya que este perfil que se está proponiendo es “normal”, además se estableció que al ser en un tiempo de 60 s., y con un tiempo de 20 s. de aceleración y 20 s. de desaceleración, la trayectoria resultante sea un trapezoide de 3 secciones de 20 s., es decir 20 s. de aceleración, 20 s. de velocidad constante y 20 s. de desaceleración, lo que resulta una trayectoria de movimiento como se muestra en la figura 2-15, donde alcanza una velocidad máxima de 3000 RPM.
Figura 2-15 Perfil de Movimiento en Motion Analyzer
CAPÍTULO II Selección del Equipo
Página 45 se pasa a la pestaña de selección, ahí se selecciona con que series de motores se quiere la búsqueda, en este caso se puso Serie Y, ya que son motores de poco torque y no se necesita mucho para la estación de trabajo, además de son una combinación potente con los Servodrive de la familia ULTRA como se menciono anteriormente, además no necesita caga de engranes, una vez que se tienen estos parámetro configurados, existe la posibilidad de que la selección sea manual o automática, en este caso se escogió el modo de selección en automático, como se muestra en la figura 2-16.
Figura 2-16 Pestaña de Selección en Motion Analyzer
CAPÍTULO II Selección del Equipo
Página 46 que están en color verde, son las que cumplen con todas las características que se proporcionaron, las amarillas, son las que están muy cerca del límite de operación, y las rojas son las que están fuera del rango de operación, de esta lista se selecciono la solución compuesta por un servomotor Y-2006-2 y el servodrive ULTRA3000 2098-DSD-010, ya que cumple con todas las características establecidas en los pasos anteriores.
Figura 2-17 Soluciones de Motion Analyzer
CAPÍTULO II Selección del Equipo
Página 47 puede observar que todos los valores no sobrepasan los valores máximos para su uso en la aplicación escogida, o sea en la estación de trabajo.
Una vez obtenida la solución, este software da la opción de exportar los resultados a Word, Excel o PDF, y genera un reporte de todos los parámetros seleccionados en los pasos anteriores así como de la solución obtenida, es decir el equipo seleccionado para la aplicación, en este caso la estación de trabajo.
Figura 2-18 Solución escogida en Motion Analyzer