ESCUELA SUPERIOR DE INGENIERÍA
MECANICA Y ELÉCTRICA
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA
DE CONTROL AUTOMATICO VERTICAL PARA SU APLICACIÓN
EN VEHÍCULOS AEREOS.
PRESENTAN
ASESORES
QUE PARA OBTENER EL TÍTULO DE INGENIERO
EN CONTROL Y AUTOMATIZACIÓN
T E S I S
ALAN PAZ MOSCO
LUCIANO
Primeramente agradezco al Instituto Politécnico Nacional y a la sociedad en general, por brindarme la oportunidad de tener una formación profesional de calidad, vanguardia y prestigio en México.
A mis padres que estuvieron cerca y lejos apoyándome totalmente en aquellas noches de desvelo. Agradeciendo especialmente a mi Mamá, cuyos esfuerzos infatigables en todos los sentidos fueron cruciales para cumplir esta importante empresa. Realmente mi ejemplo de rectitud profesional, y grandes valores humanos.
A mi hermano, mis primos-hermanos, tíos y abuelos. Valiosas personas, que de maneras distintas me auxiliaron en este momento y siempre.
Gracias a mis amigos José Alberto, Fidel, Miriam, Verenice. Con los que compartí conocimientos, grandes momentos, gratas experiencias y trascendieron en mi vida como estudiante.
A mi buen amigo Arnulfo, cuya experiencia y sugerencias modificaron significativamente nuestras vidas.
Por la atención, sus valiosas enseñanzas durante la carrera, su formidable entrega a la docencia, además de su importante apoyo para el desarrollo de este trabajo agradezco de manera particular a: Dra. Margarita Ochoa Galván, Dr. Josué Javier Téllez Luna, Dr. Leonardo Gabriel Vega Macotela, M en C. Pino Durán Medina.
Una mención especial al Dr. Argeo Vázquez Martínez quien me apoyo de manera fundamental e incondicional. Quedo muy agradecido por sus consideraciones. Todos han sido una inspiración y ejemplos determinantes en mi estancia en la ESIME Z.
A NPC por permitirme cumplir con esta ardua labor, dándome los medios y capacidades suficientes, para concluir con esta etapa de aprendizaje y retos. Gracias PC por darme la oportunidad y privilegio de vivir en este tiempo, rodeado de una familia y amigos incondicionales.
A mi Madre Aida Araceli, por ser el ejemplo de esfuerzo y dedicación del día a día, por proveer aún más de lo necesario e inculcar principios de honestidad y respeto. Gracias por tu apoyo y amor inmenso, no pude haber sido más bendecido con una madre como tú. Jorge, gracias por apoyar siempre a mi Madre y darnos un lugar en tu vida.
A mis Abuelos (Guadalupe y Rubén), por acogerme como un hijo más, por darme su tiempo y atenciones durante todo este tiempo. Gracias por acoger a mi familia ten cerca de ustedes, por darnos ejemplos de compromiso y trabajo. Los amo mucho.
A mi Compañera de Vida y Amiga Claudia, por tu paciencia durante este largo periodo, por brindarme tú apoyo, cariño y amor incondicional. Gracias por tu consejo y consuelo oportuno, por esas noches de espera y desconcierto.
A mis Hijas Amlici Noemi y Ribka Desiree, por ser el motor para alcanzar estas metas, por su alegría, amor y consuelo aún en los momentos más desoladores, por su sonrisa siempre oportuna y sus palabras escasas pero tan alentadoras: TE AMO PAPA.
A mis Amigos (David, Francisco, Isaac, Omar, Beatriz) por ser los mejores colaboradores durante esta etapa, gracias por sus consejos y trabajo arduo, gracias por siempre dar el plus no importando en día o la hora. Espero volver a vivir tan grata experiencia a su lado.
A mis Profesores (Dra. Margarita Ochoa, Dr. Josué Téllez Luna, Dr. Leonardo Vega Macotela, Dr. Mauricio Pérez Romero) por ser mis mentores más significativos durante estos años, por compartir su conocimiento y experiencia. Por marcar la diferencia brindando su apoyo y siendo un gran ejemplo en mi educación y en mi vida.
CONTENIDO
Introducción ...
XII 1.1 Vehículos Aéreos no Tripulados... 13
1.1.2 Aplicaciones de los UAV ... 14
1.1.3 Situación en México de los UAV ... 14
1.2 Cuadri-rotores ... 15
1.2.2 Principio de operación ... 18
1.2.3 Situación en México de los cuadri-rotores. ... 21
Capítulo 2 ... 23
2.1 Diagrama conceptual del vehículo Cuadri-rotor ... 24
2.2 Estructura ... 25
2.3 Controlador de Vuelo ... 26
2.4 Comunicación inalámbrica ... 28
2.5 Sensor de Altura ... 30
2.6 Mecanismo de propulsión ... 31
2.7 Hélice ... 34
2.8 Controlador de velocidad para motor brushless ... 38
2.9 Alimentacion del vehículo ... 40
2.10 Diagrama general del ensamble eléctrico... 41
2.11 Identificación de componentes en el cuadri-rotor ... 42
Capítulo 3 ... 45
3.1 Análisis del Modelo... 46
3.2.2 División de temas para aprendizaje y objetivos específicos ... 61
3.2.3 Código de vuelo automático de altura ... 65
3.2.4 Algoritmo de vuelo automático de altura ... 69
Capítulo 4 ... 73
4.1 Integración (configuración inicial) ... 74
4.1.1 Transmisor Turnigy 9 CH ... 74
4.1.2 Calibración de aceleración en el ESC ... 75
4.2 Experimentación ... 76
4.3 Resultados experimento 1 ... 78
4.3.1 Simulación experimento 1 ... 79
4.3.2 Comparación Experimentación-Simulación 1 ... 80
4.4 Resultados experimento 2 ... 82
4.4.1 Simulación Experimento 2 ... 83
4.4.2 Comparación Experimentación-Simulación 2 ... 84
4.5 Resultados experimento 2-A ... 86
4.5.1 Simulación Experimento 2-A ... 87
4.5.2 Comparación Experimentación-Simulación 2-A ... 88
Conclusiones ... 90
Trabajo Futuro ... 91
Referencias ... 92
Apéndice A ... 94
Apéndice B ... 96
B-1 Micro controlador principal (Controlador de Vuelo) ... 97
B-2 Micro controlador auxiliar (Sensor de Ultrasonido) ... 98
Apéndice C ... 99
C-1 Ensamble Mecánico General ...100
C-2 Detalle del Ensamble en Centro y Extremos ... 101
INDICE DE FIGURAS
Capítulo 1
Figura 1.1 Vehículo cuadri-rotor (Configuración Multi rotor) ... 16
Figura 1.2 Bréguet Richet Gyroplane No. 1... 16
Figura 1.3 Cuadri-rotor de George De Bothezat, Febrero 21, 1923 ... 17
Figura 1.4 OE hmichen Cuadri-rotor diseñado en 1924 ... 17
Figura 1.5 Diagrama conceptual de un cuadri-rotor ... 18
Figura 1. 6 Dinámica del cuadri-rotor ... 19
Figura 1. 7 Mecánica de la configuración de un cuadri-rotor en cruz (+) ... 20
Figura 1. 8 Mecánica de la configuración “x” de un cuadri-rotor. ... 21
Capítulo 2
Figura 2. 1 Diagrama conceptual del vehículo cuadri-rotor ... 24
Figura 2. 2 Estructura del cuadri-rotor. ... 25
Figura 2. 3 Controlador de vuelo ... 27
Figura 2. 4 Transmisor Turnigy 2.4 GHz 9 CH ... 28
Figura 2. 5 Sensor ultrasónico de distancia ... 30
Figura 2. 6 Motor Brushless Turnigy 2730 1300 kv ... 33
Figura 2. 7 Diámetro y paso de hélice ... 34
Figura 2. 8 Relación PWM - Fuerza empuje ... 37
Capítulo 3
Figura 3. 1 Esquema General de un cuadri-rotor ... 46
Figura 3. 2 Representación gráfica del sistema en tiempo discreto ... 48
Figura 3. 3 Diagrama a Bloques del sistema con retenedor de orden cero ... 48
Figura 3. 4 Respuesta del sistema ante un escalón unitario (LA y LC) ... 50
Figura 3. 5 LGR del sistema en lazo abierto y ubicación de polos deseados ... 51
Figura 3. 6 Lugar geométrico del factor de amortiguamiento ... 52
Figura 3. 7 LGR del sistema compensado ... 53
Figura 3. 8 Respuesta en el tiempo del sistema compensado ... 54
Figura 3. 9 Diagrama a bloques de la simulación ... 55
Figura 3. 10 Respuesta del sistema con el controlador PD sintonizado ... 56
Figura 3. 11 Respuesta del sistema con el control PD sintonizado y ajustado ... 57
Figura 3. 12 Respuesta del sistema ante una perturbación a la salida ... 58
Figura 3. 13 Respuesta del sistema ante un escalón no unitario con
perturbación a la salida ... 59
Figura 3. 14 Esquema del micro controlador en la tarjeta de vuelo ... 61
Capítulo 4
Figura 4. 1 Plataforma de experimentación. ... 76
Figura 4. 2 Máximo sobre impulso experimento 1 ... 78
Figura 4. 3 Simulación de experimentación 1 ... 79
Figura 4. 4 Respuesta en el tiempo del sistema teórico y experimental 1 ... 80
Figura 4. 5 Máximo sobre impulso experimento 2 ... 82
Figura 4. 6 Simulación de experimentación 2 ... 83
Figura 4. 7 Respuesta en el tiempo del sistema teórico y experimental 2 ... 84
Figura 4. 8 Máximo valor de perturbación ... 86
Figura 4. 9 Simulación de experimentación 2-A ... 87
INDICE DE TABLAS
Tabla 1 Componentes del cuadri-rotor ... 24
Tabla 2 Estimación del peso del cuadri-rotor ... 32
Tabla 3 Muestras de relación PWM - Fuerza de Empuje ... 36
Tabla 4 Componentes del Cuadri-rotor Vista Superior ... 42
Tabla 5 Componentes del cuadri-rotor Vista Lateral ... 43
Tabla 6 Componentes del cuadri-rotor Vista Isométrica ... 44
Tabla 7 Identificación de pines en tarjeta controladora ... 62
Tabla 8 Datos experimentación 1 ... 81
Tabla 9 Datos simulación 1 ... 81
Tabla 10 Datos experimentación 2 ... 85
Tabla 11 Datos simulación 2 ... 85
Tabla 12 Datos experimentación 2-A... 89
Resumen
En el presente trabajo, se parte de la selección de los componentes necesarios para realizar el ensamble de un prototipo aéreo de ala rotativa “cuadri-rotor”. Para posteriormente realizar el correcto ensamble de los mismos obteniendo así un vehículo funcional. Hecho lo anterior se diseña un algoritmo de control automático de altura, basado en un esquema PID, para su programación mediante una plataforma libre, con un comportamiento satisfactorio.
Objetivos
General
Diseñar un algoritmo de control automático de altura, mediante una plataforma libre, utilizando elementos adicionales de medición, para su posterior implementación en un vehículo cuadri-rotor.
Particular
• Ensamblar un prototipo cuadri-rotor funcional
• Seleccionar e implementar los elementos de medición necesarios para la obtención de datos en el controlador de vuelo.
• Definir una estrategia de control adecuada y diseñar el controlador que permita el correcto desempeño del vehículo en la tarea de altura.
Justificación
Tanto en ámbitos de experimentación e investigación como en áreas de diversión y entretenimiento, los vehículos aéreos no tripulados están teniendo un gran auge tecnológico, principalmente los cuadri-rotores, debido a algunas ventajas sobre otros vehículos de su clase, como mayor versatilidad de movimientos, mayor capacidad de carga, aterrizaje y despegue vertical.
Al maniobrar estos vehículos en zonas de difícil acceso para seres humanos y/o vehículos terrestres, o en la identificación de estructuras o patrones de terreno específicos, exploración al interior de edificaciones, etc., existe siempre la cuestión de la altura, ya que al contar con mayor versatilidad de movimientos, la manipulación de estos, afecta directamente a la altura total del vehículo con respecto a la superficie de despegue. [1]
Por lo cual se decide diseñar un mecanismo útil que asista al usuario remoto del vehículo, maniobrar todos sus grados de libertad sin perder la altura especificada por el mismo. Aunque existen mecanismos muy eficientes para el control automático del vehículo, son bastante caros. Así se opta por el diseño de un medio de control sencillo y de fácil implementación. De igual forma es importante mencionar que se han desarrollado diferentes investigaciones acerca de estos vehículos, principalmente enfocadas a la investigación de los actuadores y controladores necesarios para su funcionamiento. [2]
Alcance
Introducción
A lo largo de cuatro capítulos se desarrolla la integración de un controlador de vuelo con un cuadri-rotor, en el cual se programa previamente un algoritmo de control manual, asistido automáticamente en la tarea de altura.
En el capítulo I se analizan los antecedentes de los cuadri-rotores: generalidades, historia, clasificación, descripción de movimientos capaces de realizar por el cuadri-rotor, junto con las configuraciones típicas de la estructura que se pueden encontrar.
En el capítulo II se seleccionan los materiales en base a experiencia y el diseño conceptual del vehículo, se precisa el funcionamiento de los componentes y datos técnicos más importantes. Se plantea un esquema adecuado para el ensamble mecánico y eléctrico del vehículo.
En el capítulo III se diseña un controlador para el control de altura del vehículo, mediante el análisis del modelo matemático de desplazamiento vertical. Se traduce a código de programación mediante el análisis de los movimientos del vehículo (altitud, orientación, avance, etc.).
Antecedentes de los
cuadri-rotores
1.1
Vehículos Aéreos no Tripulados
Los Vehículos Aéreos no Tripulados UAV (por sus siglas en inglés, Unmanned Aerial Vehicles) se definen como: vehículos aéreos motorizados, que no llevan a un operador humano, utilizan fuerzas aerodinámicas para proporcionar la elevación del vehículo, son capaces de volar de manera autónoma o ser pilotado remotamente. [3]
De acuerdo al Instituto Americano de la Aeronáutica y de la Astronáutica (AIAA o The American Institute of Aeronautics and Astronautics), un UAV se define como: “Un vehículo que está diseñado o adaptado para no transportar a un piloto humano, cuya operación es llevada a cabo por un controlador de vuelo o por un sistema de control de vuelo autónomo a bordo”. [4] Los UAV tienen varias ventajas fundamentales sobre los sistemas tripulados, incluyendo una mayor maniobrabilidad, costo reducido, la reducción de las firmas de radar y menor riesgo para las tripulaciones.
1.1.1
Clasificación de los UAV
Según Nonami et. al., los UAV en función de sus características (configuración aerodinámica, tamaño, etc.) se encuentran clasificados en una de las siguientes categorías:
1.1.2
Aplicaciones de los UAV
Los mercados civiles para UAV continúan surgiendo. Por tanto las expectativas de crecimiento del mercado civil y comercial de los UAV son muy altas para la década siguiente.
Las aplicaciones civiles con más potencial de los UAV son [4]:
• Aplicaciones de seguridad, vigilancia de fronteras marítimas, tráfico de carreteras, etc.
• Manejo de desastres y crisis, búsqueda y rescate, inspección de terrenos, tuberías, construcciones, combate contra el fuego, etc.
• Agricultura, silvicultura, monitoreo ambiental, mapeo aéreo y meteorología.
• Sensado remoto y relevador de comunicaciones.
• Investigación por laboratorios en las universidades, etc.
1.1.3
Situación en México de los UAV
Desafortunadamente el mercado en México que se dedica al desarrollo de UAV es demasiado escaso, en 2011 un nuevo competidor entro al mercado internacional de los UAV, con sede en Monterrey, Aerovantech una compañía mexicana incubada por el Tecnológico de Monterrey. Entro al mercado con los modelos Beta 1-A, que tendrán un costo en el mercado de 200 mil dólares, algunas características de este vehículo aéreo son: flexibilidad de empleo de cámaras comerciales, piloto robot (el vuelo es gestionado por la computadora), piloto virtual. [6]
trabajos de investigación con buenas mejoras y sistemas funcionales a bajo costo, lo cual puede ser una buena oferta para la demanda actual.
Aunque el desarrollo de UAV es escaso en nuestro país es importante saber que están presentes en el. Nuestro país y EUA han acordado el uso de UAV en el espacio aéreo mexicano, esto con motivo del combate a la violencia, narcotráfico, crimen organizado, entre otros delitos. [7]
Los UAV estadounidenses realizan actualmente labores de espionaje dentro el espacio aéreo mexicano. Aunque el gobierno Mexicano deberá definir el alcance de su cooperación con Estados Unidos respecto al vuelo de UAV en la frontera binacional y dentro del espacio aéreo mexicano. Ya que lanzan su flota de UAV hacia la frontera desde California a Texas y a territorio mexicano, cuando se les solicita. [8]
1.2 Cuadri-rotores
Figura 1.1 Vehículo cuadri-rotor (Configuración Multi rotor)
1.2.1
Historia de los Cuadri-rotores
1907, Louis y Jacques Bréguet junto a Charles Richet, fueron los primeros en construir un cuadri-rotor. La primera demostración de vuelo archivada el 27 de septiembre de 1907. La siguiente figura muestra un cuadri-rotor con doble hélice siendo preparado para su primer vuelo tripulado. [10]
Figura 1.2 Bréguet Richet Gyroplane No. 1
Figura 1.3 Cuadri-rotor de George De Bothezat, Febrero 21, 1923
En 1924 Étienne OE hmichen construyen otro Cuadri-rotor, el cual impuso records de distancia, incluyendo el primer vuelo de 1 km en helicóptero. [5]
1.2.2
Principio de operación
Un cuadri-rotor (figura 1.5) es un vehículo compuesto por cuatro rotores localizados en los extremos de una estructura cruzada. El vuelo del vehículo es controlado variando la velocidad de los motores, por lo que este tipo de vehículos poseen ciertas características que resaltan su potencial en tareas de búsqueda y rescate, siendo estas características las que le proporcionan una mayor ventaja sobre otros UAV, tales como el despegue y aterrizaje vertical (VTOL) y la capacidad de permanecer inmóvil en el aire, de igual forma la habilidad de realizar movimientos lentos precisos. [10]
También existen ventajas de tener un sistema de propulsión basado en cuatro rotores, tales como una mayor capacidad de carga, alta maniobrabilidad, particularmente en la travesía dentro de un ambiente con muchos obstáculos, o con áreas pequeñas de aterrizaje.
Figura 1.5 Diagrama conceptual de un cuadri-rotor
(Mr) y el motor izquierdo (Ml), giran en sentido anti horario. Esta configuración es dispuesta para balancear el torque creado por el giro de los pares de motores.
Con el fin de crear un momento rotación (yawing), el cuadri-rotor debe aumentar la velocidad de sus dos rotores en sentido anti horario mientras va disminuyendo al mismo tiempo la de los dos rotores en sentido horario para un desvío a la derecha. [11]
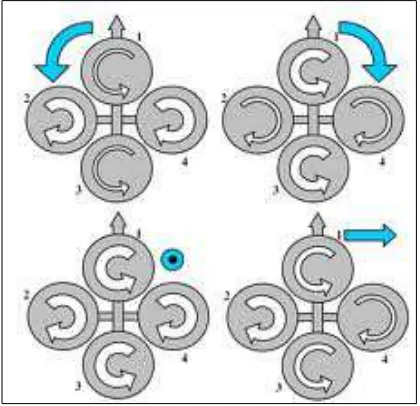
[image:22.612.202.412.262.465.2]Una simple descripción de la mecánica de la configuración en cruz de un cuadri-rotor se puede ver en la siguiente figura 1.7, donde la relación velocidad de rotación de los rotores es proporcional al grosor de las flechas.
Figura 1. 7 Mecánica de la configuración de un cuadri-rotor en cruz (+)
Para la inclinación hacia adelante, los dos rotores delanteros reducen su velocidad, mientras que los dos que están atrás aumentan su velocidad para equilibrar el empuje, pero crean un momento de inclinación. El balanceo se hace en forma similar, pero con un desequilibrio en velocidad de dos rotores de puerto y dos rotores de estribor. La figura 1.8 muestra el mecanismo equivalente de la configuración en “x”. [11]
Figura 1. 8 Mecánica de la configuración “x” de un cuadri-rotor.
1.2.3
Situación en México de los cuadri-rotores.
A principios de marzo de 2012, el gobierno adquirió un UAV tipo cuadri-rotor no tripulado que solo pesa entre 3 y 5 kilos para vigilar la Ciudad de México. Puede ser utilizado en labores de protección civil y de seguridad sin arriesgar vidas. [7]
Capítulo 2
Ensamble del Prototipo
Cuadri-rotor
2.1 Diagrama conceptual del vehículo Cuadri-rotor
El diagrama conceptual del vehiculo cuadri-rotor, mostrado en la figura 2.1, permite una mejor visualizacion de los componentes del mismo asi como algunas propuestas para el ensamble del mismo, es posible extender esta ayuda visual no solo a este proyecto, ya que muestra de manera entendible y general la composicion y armado del vehiculo.
[image:26.612.120.497.233.495.2]Figura 2. 1 Diagrama conceptual del vehículo cuadri-rotor
Tabla 1 Componentes del cuadri-rotor
N° Nombre Cantidad
1 Motor 4
2 Hélice 4
3 Controlador de Velocidad 4
4 Batería 1
5 Radio receptor 1
6 Controlador de Vuelo 1
2.2 Estructura
Para la selección de la estructura del vehículo cuadri-rotor se consideran principalmente los siguientes criterios:
Bajo peso
Resistencia
Costo accesible
De igual forma, cumpliendo los puntos antes mencionados es posible disminuir el costo total del prototipo. Dentro de una gran variedad de estructuras comerciales prefabricadas, se selecciona la mostrada en la figura 2.2. La cual está fabricada en fibra de carbono, con acoplamientos y adaptaciones de aluminio, cumpliendo completamente con los criterios antes mencionados.
2.3 Controlador de Vuelo
Como parte del objetivo general del proyecto es implementar un controlador automático de altura mediante una plataforma libre y comercial, por lo cual se pretende seleccionar una plataforma diseñada para este tipo de aplicaciones, planteando los siguientes criterios de selección:
Bajo peso
Entradas (Canales del Radio) y salidas digitales(PWM a motores)
Entradas Analógicas
Metodo de Compensación (Angulos de giro)
Arquitectura fisica suficiente (Configuracion de conexiones)
Con base en lo antes mencionado se selecciona la tarjeta mostrada en la figura 2.3 con un microcontrolador ATmega 328P y con características mayores a las previstas, lo cual permitirá adicionar al funcionamiento del vehículo, algunas funciones extras como:
Calibración de los Controladores Electrónicos de Velocidad (ESC)
Selección del tipo de arranque de los motores
Selección del tipo de bateria
Selección entre modo manual y modo automatico de altura Las características funcionales más relevantes de dicha tarjeta son:
• Marca: HobbyKing
• Modelo: Multi-Rotor Control Board V3.0 • Características:
o Tamaño:50.5mm x 50.5mm x 23.5mm o Peso: 14.5 gramos
Figura 2. 3 Controlador de vuelo
Es importante mencionar que este controlador de vuelo cuenta con 3 giroscopios, los cuales se emplean para compensar la velocidad angular ejercida en alguno de los ángulos de giro descritos previamente en el marco teórico. Los principales datos técnicos de estos sensores de velocidad angulas son:
• Marca: Murata • Modelo: ENC-03R • Características:
o Peso: 0.2 gramos
o Tensión de Alimentación:2.7 - 5.25V
2.4 Comunicación inalámbrica
En cuanto a la selección del medio de transmisión inalámbrico para la comunicación entre el vehículo y el operador mediante señales de control, se tomaron en cuenta los siguientes criterios:
Alcance (Distancia máxima de Transmisión)
Suficiente número de canales de transmisión
Mínima Interferencia
Costo accesible
Fácil manejo por el operador
[image:30.612.215.398.345.551.2]Con base en estos criterios se seleccionó el sistema de comunicación Turnigy 9X 9Ch Transmisor c/ Modulo Receptor 8ch, mostrado en la figura 2.4.
Figura 2. 4 Transmisor Turnigy 2.4 GHz 9 CH
Dado que la transmisión de estas señales es llevada a cabo mediante radiofrecuencia a 2.4 GHz, las señales de control son menos perceptibles ante interferencias como EMI, señales de radio y señales eléctricas, pero debido a que es una banda de frecuencia no licenciada puede ser perceptible a interferencias como la lluvia, arboles, nieve, entre otros.
2.5 Sensor de Altura
Para realizar un control automático de altura es necesario contar con un elemento primario de medición que cuente con la capacidad de brindar la medición de altura al dispositivo encargado de realizar las acciones de control correspondientes. Por tanto se selecciona un sensor de altura en base a los siguientes criterios:
Bajo peso
Buena resolución
Bajo costo
Fácil implementación física y funcional
Con estos requerimientos se selecciona un elemento primario del cual a continuación se muestran las características más importantes. [17]
• Marca:
• Modelo: HC-SR04 • Características:
o Angulo efectivo: <15° o Rango : 2cm – 400 cm o Resolución : 0.3 cm o Angulo de medición: 30°
o Ancho de pulso de entrada del Trigger: 10uS
2.6 Mecanismo de propulsión
En cuanto al mecanismo de propulsión, es necesario seleccionar el adecuado para cada aplicación. En este caso se debe considerar que todas las aplicaciones de aeromodelismo han emigrado de la utilización de motores con escobillas, a motores sin escobillas (Brushless), los cuales brindan ventajas sustanciales frente a otro tipo de motores específicamente para este tipo de aplicaciones. Algunas de las cuales son:
• Mayor eficiencia (menos pérdida por calor) • Mayor rendimiento (menos consumo de energía) • Menor peso para igual o mayor potencia
• Requieren menos mantenimiento al no tener escobillas • Relación velocidad/par motor es casi una constante • Mejor disipación de calor
• Rango de velocidad elevado al no tener limitación mecánica. • Menor ruido electrónico (menos interferencias en otros circuitos)
De igual forma presentan desventajas como:
• Mayor costo de construcción
• Siempre hace falta un control electrónico para que funcione (ESC), que a veces duplica el costo
Con base al diseño conceptual del vehiculo y a una estimacion acerca del peso total del vehiculo de acuerdo a los componentes necesarios a bordo, se obtiene una estimación del peso, considerando cierto grado de tolerancia en caso de ser necesarias algunas adaptaciones futuras, obteniendo los datos mostrados en la tabla 2.
Tabla 2 Estimación del peso del cuadri-rotor
Cantidad Nombre P/ Unitario Peso Total
1 Estructura Fibra de Carbono 240 gr 240 gr
1 Receptor Radio control 30 gr 30 gr
1 Controlador de Vuelo 15 gr 15 gr
1 Sensor de Altura 20 gr 20 gr
4 Motor Brushless 10 ~ 30 gr 40 ~ 100 gr
4 Controlador de Velocidad 10 ~ 20 gr 40 ~ 80 gr
4 Hélice 4 ~ 10 gr 16 ~ 40 gr
1 Bateria Recargable 100 ~ 130 gr 100 ~ 130 gr
1 Cableado fijo 40 ~ 60 gr 40 ~ 60 gr
5 Cable tipo servo 10cm 5 gr 25 gr
Peso Total Aproximado 642 gr +/- 15%
Se toma como principal referencia los datos de máximo desempeño de los diferentes tipos de motores disponibles, lo cual conduce a la selección del siguiente tipo de motor cuyos datos de máximo desempeño son:
Tensión: 2~3S~11.1 volts
Corriente Maxima: 3.5~7.5 Amp
Se desea operar el motor dentro de los limites de funcionamiento, con las tolerancias respectivas, por lo cual se asume que trabajando a poco más de su media capacidad un motor aportaria un empuje de 320 gr. aproximadamente. Dado que son cuatro motores el empuje total estimado sería de 1280 gr, lo cual es el doble del peso total calculado del vehiculo. Esto permite tener un amplio rango de tolerancia, dotando al vehículo con capacidad de ser implementado para tareas mas especificas. Los datos generales para el modelo de motores seleccionado son:
• Marca: Turnigy
• Modelo: 2730 Brushless Motor 1300kv • Caracteristicas:
o Dimensiones: 32mm x 27mm, 43mm(con eje) o Peso: 28g
2.7 Hélice
El formato de especificación para las hélices esta dado en función de las caracteriticas tecnicas de la hélice, expresando los siguientes datos:
X x Y Donde: “X” es el diámetro de la hélice en pulgadas
“Y” es la inclinación de las palas en pulgadas
Figura 2. 7 Diámetro y paso de hélice
Como se mencionó anteriormente el cálculo de este componente se basa en los datos de máximo desempeño de los motores seleccionados, para obtener un empuje adecuado total del vehículo. El dato para la hélice es:
Hélice: 7 x 3.5~9 x 4.7 Empuje: 250~470g
En base a esto se plantean algunos criterios adicionales para la selección de la hélice:
Bajo peso
Bajo costo
Material rígido
Se selecciona un modelo de hélice fabricado de un polímero ligero y rígido, cuyo costo es bastante accesible. Las características técnicas de este componente son:
Es importante mencionar el principio básico del conjunto motor-hélice para comprender el porqué del cálculo de la fuerza de empuje que ejerce cada motor. La hélice está acoplada a un motor, el cual proporciona el movimiento de rotación. El giro de la hélice, acelera el flujo de aire hacia el borde de salida de cada perfil, a la vez que deflacta este hacia abajo. Este proceso da lugar a la aceleración hacia abajo de una gran masa de aire, movimiento que provoca una fuerza de reacción que propulsa el vehículo hacia arriba. [12]
De igual forma es necesario contar con 2 tipos de hélices. • CW (Clockwise) Derecha; Giro en sentido horario
• CCW (Counter-Clockwise) Izquierda; Giro en sentido anti horario.
Se debe alternar su colocación en el vehículo, compensando la acción de giro de las hélices contrarias y evitando un giro constante sobre el propio eje del vehículo. Para el cálculo de la fuerza real de empuje de cada motor es necesario tomar en cuenta la relación entre PWM - Velocidad – Empuje, dado que el empuje está relacionado directamente con la velocidad del motor, para lo cual se muestrean algunas velocidades a ciertos anchos de pulso específicos, se miden las RPM promedio del motor, y se calcula el empuje del mismo. Lo último puede ser calculado conociendo el diámetro, paso de la hélice y las RPM que pueda lograr.
Obteniendo los siguientes resultados:
Tabla 3 Muestras de relación PWM - Fuerza de Empuje
PWM Duty Cycle RPM Grf de empuje
123 0 0
134 1850 20.60
146 3230 63.33
157 3920 93.56
168 4460 121.35
179 4900 146.69
191 5500 185.14
202 6020 222.11
213 6250 239.54
225 6750 279.73
236 6950 296.69
247 7120 311.49
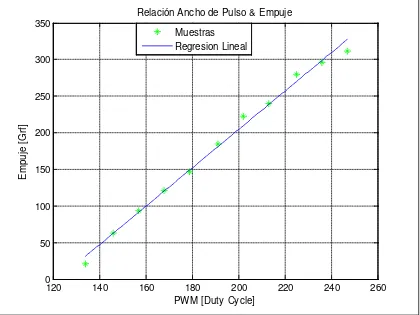
Con la finalidad de obtener una acción de control en funcion de los terminos del modelo , mediante el muestreo anterior de datos es posible llevar a cabo una regresion lineal, con la finalidad de obtener una relacion “lineal” aproximada entre el Ancho de pulso y empuje aportado de cada motor. Para lo cual mediante software, se obtiene la ecuacion de la recta aproximada a esos puntos, lo anterior basandose en el metodo de minimos cuadrados para n=1, lo cual especifica una recta.
La ecuacion de la recta obtenida es:
Figura 2. 8 Relación PWM - Fuerza empuje
En la gráfica anterior se aprecia la comparación entre las muestras de empuje y la recta ajustada a dichos datos. Se considera adecuada para la descripción del comportamiento de la relación “Fuerza de empuje vs PWM”.
120 140 160 180 200 220 240 260 0
50 100 150 200 250 300 350
Relación Ancho de Pulso & Empuje
PWM [Duty Cycle]
E
m
puj
e [
G
rf
]
2.8 Controlador de velocidad para motor brushless
Un motor brushless se puede analogar a un motor trifásico que tiene un rotor con imanes permanentes. Los devanados del estator son alimentados con tensiones de manera que el iman permanente del rotor sigue los campos magneticos creados por los devanados del estator. Según T.J.E. Miller [14] existen dos tipos de motores brushless, aunque su principio de funcionamiento es exactamente igual, se diferencian por la manera de alimentar los devanados del estator.
• Motor Brushless Senoidal
Cada una de las fases (devanados) se alimenta con tensión alterna trifásica. El flujo del entrehierro es senoidal y es generado por los imanes del rotor que tienen una forma especial.
• Motor Brushless Trapezoidal
Cada una de las fases (devanados) se alimenta con pulsos rectangulares de tensión con un desfase entre cada fase de 120 °. Los devandos estan concentrados
Con base a las caracteristicas de funcionamiento antes mencionadas de los motores brushless, es necesario el diseño o adquisicion de un circuito electrónico para el control de la velocidad de dichos motores. Para este proyecto se adquiere un Controlador Electrónico de Velocidad (ESC), debido a la complejidad en el diseño de este tipo de circuitos electrónicos.
Al igual que con los componentes del vehiculo antes seleccionados, se plantean algunos criterios de selección en base a los datos de desempeño maximo de los motores brushless antes mencionados:
Tensión de alimentación: 2~3S~11.1 volts
Corriente: Mayor a 7.5 Amp
Bajo peso
Bajo costo
Por tanto se selecciona un ESC con características técnicas que superan lo establecido en los criterios, esto para contar con una tolerancia de operación. Las características tecnicas y de operación del controlador de velocidad seleccionado para este proyecto son:
• Marca: TowerPro
• Modelo: 9g w12A Brushless Speed Controller • Corriente: 12 Amp nominal ; 18 Amp maximo • Rango de tensión: 4v - 12v.
• Baterías: 2-3 Celdas LiPo
• Salida: BEC 5V 1.5 Amp 3 Lipo
Algunas características adicionales y funciones de protección de los ESC seleccionados son:
• Selección automática 2-3 LiPo, tensiones de protección son 6V/9V respectivamente;
2.9 Alimentacion del vehículo
Es necesario contar con un medio de alimentación eléctrica para todo el sistema, para la alimentación de los motores, controladores, etc. Basándose en los datos de máximo desempeño de los motores y dado que el vehículo será manipulado remotamente, es necesaria una alimentación que pueda ser trasportada en el vehículo. Es por ello que se plantea el uso de baterías recargables cuyas características cumplan totalmente los criterios de selección. Algunos de los cuales son:
Tipo de batería: LiPo
Tensión de suministro: 4v - 12v.
Corriente: > 1200 mA
Bajo peso
Bajo costo
Con base a lo anterior se selecciona una batería recargable de bajo costo con la suficiente capacidad de carga para la alimentación de todos los elementos antes mencionados, los cuales actuaran a bordo del vehículo Las características técnicas de la batería seleccionada son:
• Marca: Turnigy
• Modelo: Nano – tech 1300 mA LiPo • Corriente: 1300mAh
• Tensión: 3 Celdas / 11.1V • Peso: 119g
2.10
Diagrama general del ensamble eléctrico
2.11
Identificación de componentes en el cuadri-rotor
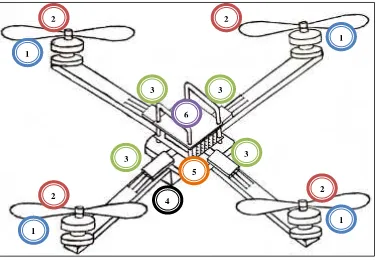
[image:44.612.115.502.193.544.2]En la figura 2.9 se aprecia la vista superior del vehículo cuadri-rotor, señalando los componentes más sobresalientes. En la Tabla 4 se enumera la cantidad y distribución de dichos componentes en el cuadri-rotor.
Figura 2. 9 Distribución física de componentes Vista Superior
Tabla 4 Componentes del Cuadri-rotor Vista Superior
N° Nombre Cantidad
1 Motor Brushless Turnigy 2730 4
2 Controlador de Vuelo ATmega 328P 1
3 ESC Tower Pro 9g w12A 4
1
3
2
1
1 1
3 3
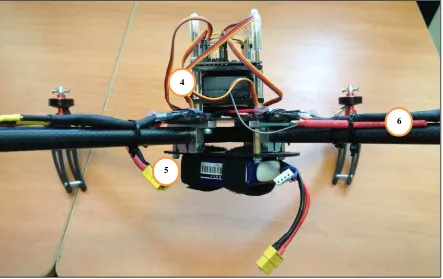
En la figura 2.10 se observa la vista lateral del vehículo. En la Tabla 5 se señalan los componentes más visibles en este perfil, indicando su distribución, descripción y cantidad a bordo del vehículo cuadri-rotor.
Figura 2. 10 Distribución física de componentes Vista Lateral
Tabla 5 Componentes del cuadri-rotor Vista Lateral
N° Nombre Cantidad
4 Receptor Turnigy 9x (8ch) 1
5 Batería LiPo Turnigy Nano – tech 1300 mA 1 5
4
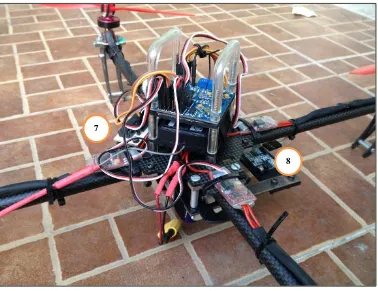
En la figura 2.11 se aprecia la vista en isométrico del vehículo cuadri-rotor. Finalmente en la Tabla 6 se muestra la cantidad y descripción de los componentes abajo marcados.
Figura 2. 11 Distribución física de componentes Vista Isométrica
Tabla 6 Componentes del cuadri-rotor Vista Isométrica
N° Nombre Cantidad
7 ATtiny 2313 1
8 Sensor Ultrasónico HC-SR04 1 7
Capítulo 3
Análisis del Modelo y
Diseño del Algoritmo de
3.1 Análisis del Modelo
Existen bastantes trabajos de investigación acerca del control de cuadri-rotores. Dada la versatilidad de movimientos de estos vehículos las ecuaciones que describen su comportamiento aumentan su complejidad, es por ello que este tipo de trabajos se concentran en su gran mayoría en áreas de posgrado.
3.1.1
Modelo de desplazamiento vertical del cuadri-rotor
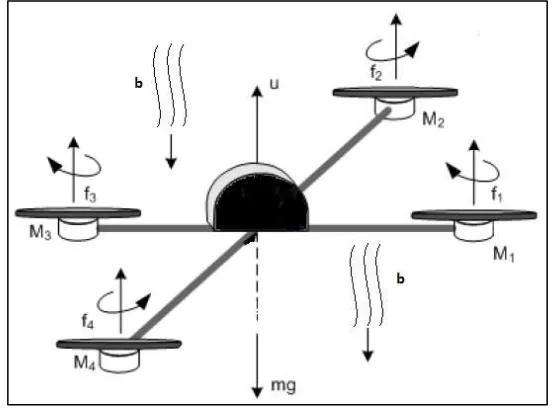
[image:48.612.168.445.335.539.2]Se toma como referencia el modelo del cuadri-rotor desarrollado por Zamudio 2010, [15] aislando la ecuación de desplazamiento vertical, la cual describe lo siguiente:
Figura 3. 1 Esquema General de un cuadri-rotor
Cada motor ejerce una fuerza de empuje correspondiente a su velocidad de giro, por lo que el empuje generado por el conjunto de los cuatro motores sobre el vehículo está dado por:
� = � �� 4
�=1
La masa ejerce una fuerza contraria al empuje de los motores expresada por:
� = �� … (3)
Al desplazar las hélices una gran masa de aire hacia la parte inferior del vehículo, el aire ejerce una fuerza de fricción sobre la parte superior, la cual está en función del coeficiente de fricción del aire “b” y de la velocidad de desplazamiento vertical del cuerpo. La cual puede ser expresada como:
����� = � ���� … (4)
Aplicando la Segunda Ley de Newton:
� � =�� … (5)
Para el movimiento sobre el eje Z del vehículo:
� − �����− � = ��
��2���(2�)= �(�)− � ��(�)
�� − ��
Agrupando términos:
��2���(2�)+ � ��(�)
�� = �(�)− �� … (6)
�(�)(��2 +��) = ∴ �(�)
������(�)=
1/�
�2+ �
� �
… (8)
El controlador de vuelo está basado en un micro controlador, por lo cual es necesario analizar el modelo de desplazamiento vertical como un modelo en tiempo discreto en el dominio de Z. Representándolo de la siguiente manera.
Figura 3. 2 Representación gráfica del sistema en tiempo discreto
Donde ������∗(�) representa la salida del retenedor, el cual se encarga de muestrear la señal continua a una señal discreta mediante un tren de impulsos con un periodo de muestreo T.
Para obtener la función de transferencia en el dominio de Z (función de transferencia pulso o FTP) es necesario incluir al modelo continuo la función de transferencia del retenedor de orden cero, quedando:
Figura 3. 3 Diagrama a Bloques del sistema con retenedor de orden cero
Considerando que 1− ��� = 1− �−1
Se obtiene G(z) mediante:
�(�) = 1− �−1ℤ ��(�)
� � ∴ �(�) = 1− �−1ℤ �
1/�
�2��+ �
��
Separando en fracciones parciales para obtener los coeficientes de cada término y aplicando la transformada Z a cada uno de dichos términos mediante tablas:
�(�) = 1− �−1����� −1
− ���− ����−2� − ��
�2− ��2�−1� �1− �− ����−1�+���2 − ��2�−1� (1− �−1)2�1− �− ����−1�
�
Desarrollando los términos de la expresión anterior, obtenemos finalmente la función de transferencia en tiempo discreto que relaciona el desplazamiento vertical del vehículo con respecto a la fuerza de empuje aplicada al mismo.
�(�) = ��� + �
�2 �− ���� �−1+���2− �− ��� ���2+ ���� �−2
1− �1 + �− ���� �−1+ �− ����−2
… (10)
Esta expresión muestra la dinámica de desplazamiento vertical de manera muy general, no solo para cuadri-rotores si no para cualquiera de las variaciones de los mismos como Tricópteros, Hexacópteros, PVTOL, etc.
Para este caso, existen parámetros específicos que diferencian a este vehículo de otros, parámetros que es necesario considerar para el correcto análisis del modelo los cuales se mencionan a continuación.
Masa total del cuadri-rotor: 0.700 Kg
Relación PWM – Fuerza de Empuje (Ver Capitulo 2-2.7)
Área estimada del vehículo: 0.0233 m2
3.1.2
Control de altura por medio de un Controlador
Proporcional-Derivativo (PD) discreto.
La selección del controlador a usar y de los parámetros a sintonizar depende directamente de las características de respuesta del sistema, para lo cual es necesario evaluar la implementación de algún método de sintonización para el controlador.
Objetivos de Control:
Tiempo de levantamiento < 6 seg
Máximo sobre impulso < 15%
Error en estado estacionario < 5%
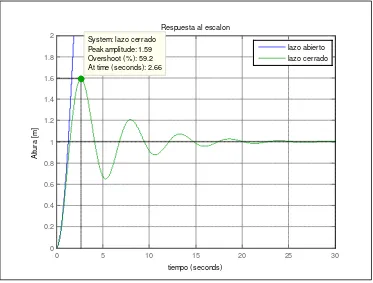
[image:52.612.121.494.408.691.2]Una vez planteados los objetivos, se observa el comportamiento de la planta en lazo abierto y en lazo cerrado.
Figura 3. 4 Respuesta del sistema ante un escalón unitario (LA y LC)
Respuesta al escalon
tiempo (seconds) A ltur a [ m ]
0 5 10 15 20 25 30
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
System: lazo cerrado Peak amplitude: 1.59 Overshoot (%): 59.2 At time (seconds): 2.66
El sistema en lazo abierto es inestable, por lo cual no es posible sintonizar un controlador mediante los métodos convencionales de Ziegler-Nichols. El sistema en lazo cerrado es estable, por tanto a partir de dicha curva de respuesta se propone el esquema de control a implementar.
Es necesario disminuir el máximo sobre impulso, y dado que el tiempo de levantamiento es bajo, en comparación al límite establecido, es posible utilizar un controlador PD, haciendo al sistema más lento, pero disminuyendo las oscilaciones y el tiempo de asentamiento. Otra razón por la que se omite la acción integral es porque aumenta las oscilaciones y el error tiende a cero en la gráfica de respuesta.
La función de transferencia expresada en términos de sus raíces (polos y ceros) queda como:
�(�) = �+ 0.9987
(� −1)(� −0.9960) … (12)
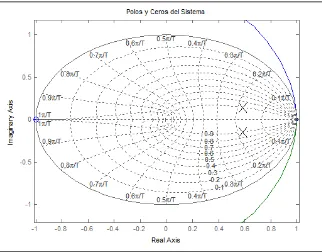
[image:53.612.146.468.431.683.2]De acuerdo a las características del lugar geométrico del factor de amortiguamiento en general mostradas en la figura 3.6, se aprecia que el correspondiente al sistema es muy bajo y por tanto tiene un tiempo de asentamiento grande:
Figura 3. 6 Lugar geométrico del factor de amortiguamiento
Al realizar una acción derivativa implica la adición de un cero en el numerador de la función de transferencia pulso del sistema, por tanto se busca que la ubicación de los polos en lazo cerrado se encuentre dentro de la trayectoria del factor de amortiguamiento de 0.9, para así asegurar que las oscilaciones disminuyan cumpliendo con el requerimiento antes marcado de <15% de sobre impulso.
Observado el comportamiento de los polos al mover la ganancia, se desea colocarlos en z = 0.7 +/- 0.14 j mostrados en la figura 3.5, dado que no es posible llevarlos hasta esa posicion solo con una gananacia proporcional, se obtienen los ángulos que aportan los polos y ceros del sistema a la ubicación deseada de los polos:
��1= 154.68 ° ��2 = 154.9831° ��1 = 4.7114°
Obteniendo la deficiencia angular para la ubicación deseada cumpliendo la condición de ∑ ��� − ∑ ��� = ±180° se tiene:
Para cumplir con esta condición, el cero del controlador PD debe de aportar 124.94°, por tanto se calcula la ubicación de dicho cero sobre el eje real a partir de la deficiencia angular:
�.�. = 0.14
tan 55.06° �.�. = 0.09781
∴ �=�.����� … (14)
Para obtener el valor de la ganancia K con la cual se lleve a los polos del sistema a la posición deseada, se utiliza la siguiente condición de magnitud:
�|��(�)�(�)| = 1 → � �(� −0.79781)(�+ 0.9987)
(� −1)(� −0.9960) ��=0.7+0.14� = 1
Sustituyendo el valor de z y resolviendo el álgebra necesaria:
∴ �= �.�� … (15)
Sustituyendo valores en el controlador PD se obtiene el siguiente LGR:
0 0.05 0.1 0.15 0.2
0.1π/T 2π/T
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Polos y Ceros del Sistema con Controlador PD
[image:55.612.124.491.416.688.2]Se aprecia la posición del cero del controlador en el lugar calculado, de igual forma se observa que la trayectoria de los polos pasa muy cerca de la posición especificada como polos deseados. Verificando la funcionalidad del controlador se observa la FTP del controlador así como la respuesta temporal del sistema:
[image:56.612.116.502.160.485.2]��(�) =�.���(� − �.����) … (16)
Figura 3. 8 Respuesta en el tiempo del sistema compensado
Existen mejorías de comportamiento en comparación con la respuesta del sistema sin controlador ya que el máximo sobre impulso disminuye 20% y el tiempo de asentamiento disminuye 5 segundos. Pero el sistema no cumple en su totalidad con los requisitos preestablecidos, por lo cual es posible llevar a cabo un ajuste manual de las ganancias.
Simulado el sistema se obtendrán datos más aproximados a la realidad, en base a esto se determinara si es o no necesario un ajuste de ganancias.
Step Response Time (seconds) A m pl itude
0 5 10 15
3.1.3
Simulación
Con los resultados obtenidos a partir del diseño del controlador se realiza una simulación del desplazamiento vertical del vehículo, contemplando todas conversiones planteadas para su implementación en el prototipo, tales como las escalas de medición y de comparación de la referencia y la salida, así como la relación obtenida entre ciclo de trabajo de PWM y el empuje colectivo generado por los motores.
La plataforma utilizada para la simulación del modelo es Simulink de Matlab R2009, el diagrama a bloques correspondiente se muestra a continuación:
Figura 3. 9 Diagrama a bloques de la simulación
Los parametros utilizados para esta simulacion son:
m= 0.7 Kg
g= 9.8 m/s2
Figura 3. 10 Respuesta del sistema con el controlador PD sintonizado
Se propone una modificación la ganancia K. Dado que el lugar de las raíces del sistema compensado, mostrado en la figura 3.5, marca la trayectoria de los polos muy cerca al punto calculado, mover los polos sobre esa trayectoria debe de ser suficiente para satisfacer los requerimientos de diseño del controlador. La salida del sistema con el controlador PD ajustado queda como:
Figura 3. 11 Respuesta del sistema con el control PD sintonizado y ajustado
Gracias a este ajuste final de ganancias la FTP del controlador PD queda como:
En la figura 3.12 se muestra la respuesta del sistema con una perturbación a la salida, se aprecia como el controlador compensa rápidamente el cambio en la salida (< 2seg). El sobre impulso generado por esta perturbación es menor (<3%), cabe señalar que esto depende directamente de la magnitud de la perturbación.
Por último se somete al sistema a una entrada escalón no unitario correspondiente a 3 metros de altura. En la figura 3.13 se observa la gráfica de respuesta, donde se observa que a pesar del aumento del sobre impulso, este no rebasa el límite establecido como objetivo de control (< 15%). Asimismo la perturbación es compensada de manera rápida no afectando el valor final de la salida.
3.2 Diseño del Algoritmo de Control
Analizado el sistema es necesaria la implementación de la estrategia de control calculada en un dispositivo capaz de ejecutar dichas acciones de control al sistema físico. Por tanto se programa el controlador PD de altura, en la tarjeta controladora de vuelo, permitiendo el diseño total del algoritmo de control a implementar. Esto mediante un compilador de código libre y especial para el micro controlador contenido en la tarjeta controladora de vuelo.
3.2.1
Plataforma de programación AVR Studio 5.1
AVR Studio es un ambiente integrado de desarrollo (IDE Integrated Development Environment) para escribir y depurar aplicaciones AVR en ambientes como Windows XP. AVR Studio proporciona una herramienta para la gestión de proyectos, editor de archivos fuente, simulador, ensamblador, y una interfaz para programación en C/C++.
AVR Studio soporta la gama completa de herramientas de ATMEL AVR. Cada actualización contiene las últimas actualizaciones para cada herramienta, así como soporte para los nuevos dispositivos AVR.
3.2.2
División de temas para aprendizaje y objetivos
específicos
Dado que los micro controladores de ATMEL no son muy conocidos entre la comunidad estudiantil local, es necesario investigar el funcionamiento y el entorno de programación manejado por estos. Se traza un proceso de aprendizaje, en el cual se aíslan cada uno de los componentes de programación necesarios para el diseño del algoritmo final, identificando posibles problemáticas dentro de cada división para posteriormente integrar toda la programación obteniendo un código funcional.
A) Identificación de la tarjeta controladora
[image:63.612.160.455.400.687.2]Tabla 7 Identificación de pines en tarjeta controladora
Identificador Clave
Funcional
Descripción
PD3 INT1 Interrupción Externa Canal Throtle
PB7 PCINT7 Interrupción cambio de estado Canal Ruddle
PD5 OC0B Salida B comparación con Timer 0 Motor 4
PD6 OC0A Salida A comparación con Timer 0 Motor 3
PD7 - Salida Digital a ATtiny 2313
PB0 PCINT0 Interrupción cambio de estado HC-SR04
PB1 OC1A Salida A comparación con Timer 1 Motor 2
PB2 OC1B Salida B comparación con Timer 1 Motor 1
PB3 MOSI Salida Maestro – Entrada Esclavo para ISP
PB4 MISO Entrada Maestro – Salida Esclavo para ISP
PB5 SCK Reloj de sincronización para ISP
AVCC - Voltaje análogo de referencia para ADC
PC0 ADC0 Convertidor analógico digital Canal 0
PC1 ADC1 Convertidor analógico digital Canal 1
PC2 ADC2 Convertidor analógico digital Canal 2
PC3 ADC3 Convertidor analógico digital Canal 3
PC4 ADC4 Convertidor analógico digital Canal 4
PC5 PCINT13 Interrupción cambio de Manual – Automático
PC6 RESET Para ISP
PD1 PCINT17 Interrupción cambio de estado Canal Aileron
B) Declaración de registros
Conocer la manera de llevar a cabo la configuración de este tipo de micro controladores, específicamente el ATmega 328P. Esto es la declaración de registros, direccionamientos, configuración tanto de funciones propias del micro controlador como de funciones de usuario, etc.
C) Contadores (Timers)
Comprender el principio de operación de los contadores, así como sus características y modos de uso.
D) PWM (Pulse Width Modulation)
Obtener un PWM funcional, de acuerdo a las condiciones de diseño del mismo, obteniendo el rango de ancho de pulso del PWM necesario para cada controlador de los motores Brushless, ESC.
E) ADC (Analog to Digital Converter)
Conseguir la lectura de una señal analógica, convirtiéndola a valores digitales con una resolución de 10 bits, analizándola para implementar mediciones de sensores basados en señales analógicas a la salida de los mismos.
F) ADC Múltiple
H) ADC & 4 PWM
Extender el código anterior para el control del ancho de pulso de 4 PWM en diferentes salidas, verificando la funcionalidad de los mismos, mediante la observación del correcto funcionamiento de los motores.
I) Lectura de señales digitales
Implementar un código para la ejecución de rutinas de acuerdo al estado lógico del pin de entrada o lectura. Así mismo poder detectar flancos positivos y negativos en las señales digitales de entrada.
J) Interpretación de señales digitales & 4 PWM
3.2.3
Código de vuelo automático de altura
Diseñado el algoritmo de control de altura, y una vez adquiridos los conocimientos planteados en la sección anterior, se procede a plasmar lo antes desarrollado en código de programación basado en lenguaje C, para su compilación y grabado en el micro controlador incluido en la tarjeta controladora de vuelo. El código final se muestra a continuación:
//Declaración de variables Globales
#include <avr/io.h>
#include <avr/interrupt.h>
//Declaración de variables Globales
volatile unsigned int length_channel[5]={0,0,0,0,0}; //Lectura de Canales del radio
volatile char tick=0; //Lectura de ancho de pulso
volatile char count=0; //Variables de Control de secuencia
volatile char count2=0;
volatile char sequence=0;
volatile unsigned int height_sp=0; //Set - Point Altura
volatile signed int error_height=0; //Calculo del Error
volatile signed int error_height_ant=0; //Error en la ejecución anterior
volatile float Kp=0.8; //Ganancia Proporcional
volatile float Td=0.039458; //Ganancia Derivativa
volatile float T=0.01; //Tiempo de Muestreo 10ms
volatile signed int control_action=0; //Calculo de la acción PD de control
volatile unsigned int hover_vel=188; //Declaración de variables Globales
static volatile signed int Gyro_yaw=0; //Velocidad angular Angulo YAW
static volatile signed int Gyro_pitch=0; //Velocidad angular Angulo PITCH
static volatile signed int Gyro_roll=0; //Velocidad angular Angulo ROLL
volatile signed int PWM_1=0;
volatile signed int PWM_2=0;
while(1){ //Ciclo infinito de ejecución
if(length_channel[4] < 135){ //Modo de vuelo manual
//Compensación de velocidades angulares
if(Gyro_roll > 3){ //Adjust ERROR Range
PWM_3 = length_channel[2];
PWM_4 = length_channel[2] + (4*Gyro_roll);
}else if (Gyro_roll < -3){
PWM_3 = length_channel[2] - (4*Gyro_roll);
PWM_4 = length_channel[2];
}else{
PWM_3 = length_channel[2];
PWM_4 = length_channel[2];
}
if(Gyro_pitch > 3){
PWM_1 = length_channel[2];
PWM_2 = length_channel[2] + (4*Gyro_pitch);
}else if (Gyro_pitch < -3){
PWM_1 = length_channel[2] - (4*Gyro_pitch);
PWM_2 = length_channel[2];
}else{
PWM_1 = length_channel[2];
PWM_2 = length_channel[2];
}
if(Gyro_yaw > 3){
PWM_1 = PWM_1;
PWM_2 = PWM_2;
PWM_3 = PWM_3 + (5*Gyro_yaw);
PWM_4 = PWM_4 + (5*Gyro_yaw);
}else if(Gyro_yaw < -3){
PWM_1 = PWM_1 - (2*Gyro_yaw);
PWM_2 = PWM_2 - (2*Gyro_yaw);
PWM_3 = PWM_3;
PWM_4 = PWM_4;
}
}else if(length_channel[4] >= 135){ //Modo de Vuelo Semi- Automatico
//Si error menor a 3 unidades, LED encendido
if ((error_height > -3) && (error_height < 3)){
PORTB |= (1 << PORTB6);
}else{
// Si la Acción de control ya esta actualizada
if(sequence==1){
// Compensación de velocidades angulares
if(Gyro_roll > 3){
PWM_3 = PWM_3;
PWM_4 = PWM_4 + (4*Gyro_roll);
}else if (Gyro_roll < -3){
PWM_3 = PWM_3 - (4*Gyro_roll);
PWM_4 = PWM_4;
}else{
PWM_3 = PWM_3;
PWM_4 = PWM_4;
}
if(Gyro_pitch > 3){
PWM_1 = PWM_1;
PWM_2 = PWM_2 + (4*Gyro_pitch);
}else if (Gyro_pitch < -3){
PWM_1 = PWM_1 - (4*Gyro_pitch);
PWM_2 = PWM_2;
}else{
PWM_1 = PWM_1;
PWM_2 = PWM_2;
}
if(Gyro_yaw > 3){
PWM_1 = PWM_1;
PWM_2 = PWM_2;
PWM_3 = PWM_3 + (5*Gyro_yaw);
PWM_4 = PWM_4 + (5*Gyro_yaw);
}else if(Gyro_yaw < -3){
PWM_1 = PWM_1 - (2*Gyro_yaw);
PWM_2 = PWM_2 - (2*Gyro_yaw);
PWM_3 = PWM_3;
PWM_4 = PWM_4;
//Inicio de Interrupciones
ISR(PCINT2_vect )//Detección de flancos positivos para lectura de señales
{
if (PIND & (1 << PIND1) && count==0){
PORTD &=~(1 << PORTD7); }
}
ISR(INT0_vect) {
if(PIND & (1 << PIND2) && count==2){
length_channel[2]=read.channel3;
height_sp = (1.0322*length_channel[2])-127; // 0 cm < height_sp < 200 cm
count++; }
}
ISR(INT1_vect) {
if (PIND & (1 << PIND3) && count==1){
length_channel[0]= read.channel1; count++;
range_roll = length_channel[0] - 187;
} }
ISR(PCINT0_vect) {
if(PINB & (1 << PINB7) && count==3){
length_channel[1]= read.channel2; count++;
range_pitch = length_channel[1] - 187;
}else if(PINB & (1 << PINB0) && count2==0){
count2++;
}else if(count2==1){
//Resolución de medición 1.56 cm/tick
length_sensor= read.ultrasonic; //Distancia máxima 400 cm = 23.52 ms Echo
count2=0;
error_height_ant=error_height; //Error anterior = error actual
error_height = height_sp - length_sensor; //Actualiza error
//Acción de control Proporcional derivativa del error actual
control_action = Kp*error_height + ((Kp*Td)/T)*(error_height-error_height_ant);
if(length_channel[4] >= 135 && sequence==0){ //Actualiza PWM si Modo Automatico
PWM_1 = hover_vel + control_action; //PWM flote más acción de control
PWM_2 = hover_vel + control_action;
PWM_3 = hover_vel + control_action;
PWM_4 = hover_vel + control_action;
sequence++; }
ISR(PCINT1_vect) //Detección de flancos positivos para lectura de señales {
if(PINC & (1 << PINC5) && count==4){
length_channel[3]= read.channel4;
range_yaw = length_channel[3] - 187;
count++;
}else if(count==5)
{
length_channel[4]= read.channel5; //Reading Channel 5
count=0;
PORTD |= (1 << PORTD7);
} }
ISR(TIMER0_OVF_vect)//Actualización de PWM
{
if(length_channel[4] >= 135 && sequence==2){ //Si Modo automático
OCR0A = Saturation.PWM3(123,247);
OCR0B = Saturation.PWM4(123,247);
Sequence=0;
}else if(length_channel[4] < 135){
OCR0A = Saturation.PWM3(123,247);
OCR0B = Saturation.PWM4(123,247);
} }
ISR(TIMER1_OVF_vect)//Actualización de PWM
{
if(length_channel[4] >= 135){ //Si Modo automático
OCR1A = Saturation.PWM1(123,247);
OCR1B = Saturation.PWM2(123,247);
}else if(length_channel[4] < 135){
OCR1A = Saturation.PWM1(123,247);
OCR1B = Saturation.PWM2(123,247);
} }
Capítulo 4
Integración,
Experimentación y
Resultados
4.1 Integración (configuración inicial)
Configuración inicial de algunos componentes que forman parte del control del vehículo, ya sea en el modo manual o automático. Esto para el uso adecuado de los mismos. De omitirse estas configuraciones, no se podrá llevar a cabo un adecuado control del vehículo cuadri-rotor.
4.1.1
Transmisor Turnigy 9 CH
Antes de realizar experimentación con el prototipo cuadri-rotor, es necesario llevar a cabo algunas configuraciones en el transmisor [22]:
• Tipo de modelo: Se selecciona el modelo de vehículo aéreo a utilizar: aeroplano. Debido al comportamiento de vuelo similar de un cuadri-rotor.
• Modeuat: Se elige el tipo de transmisión PPM: Modulación por Posicionamiento Pulso. Este tipo de transmisión permite leer las señales como trenes de pulsos, haciendo más fácil su interpretación.
• Modo sticks (Palancas) Modo 3: Stick derecho, Arriba /Abajo; Acelerador derecha / izquierda: Timón Stick izquierdo, arriba /abajo; Elevador -derecha / izquierda: Alerones
• Reversa: Se invierten los puntos finales y los iniciales de los sticks para el caso del elevador y acelerador. Con esta configuración se obtiene el comportamiento de los sticks acorde con los movimientos especificados para el cuadri-rotor.
4.1.2
Calibración de aceleración en el ESC
Al realizar la integración de todo el sistema, es necesario calibrar los rangos de aceleración entre el ESC y el transmisor, de otra manera la aceleración en los cuatro motores no ocurrirá de manera simultánea, lo cual representa un problema para las pruebas de vuelo.
El objetivo de esta calibración es que el ESC reconozca la posición mínima y máxima del stick de aceleración del transmisor. De igual forma, esta calibración es imprescindible tanto para las pruebas de vuelo manuales como en modo automático de altura.
La calibración es llevada a cabo mediante los siguientes pasos:
Con el vehículo no alimentado encender el radio transmisor
Colocar el stick de aceleración en su máxima posición
Alimentar el vehículo
Al escuchar 3 tonos cortos (Beep – Beep - Beep)
Deslizar el control de aceleración a su posición mínima
Al escuchar 3 tonos cortos y uno largo (Beep – Beep – Beep - Beeeeeeeep)
4.2 Experimentación
Para la experimentación, es necesario contar con un método de medición que permite la comprobación de los objetivos de control previamente planteados. Por lo cual se construye una plataforma con la cual será posible mantener al vehículo cuadri-rotor fijo, permitiendo el movimiento solo en el eje de desplazamiento vertical. Para la medición se coloca al fondo de la maqueta una plantilla con medidas específicas, cuya resolución es de 5 cm. La cual se muestra en la figura 4.1. Es importante señalar que este mecanismo introduce una fricción despreciable, por lo que se emplea para la comprobación de la consigna de altura.
Figura 4. 1 Plataforma de experimentación.
Efectuado el montaje del cuadri-rotor en la plataforma es necesario tener en cuenta las siguientes consideraciones:
Las guías del cuadri-rotor deben de estar centradas con respecto a la barra inferior que sujeta las mismas.
Asegurar la calibración de los giroscopios en cada cambio de batería.
Se realiza la transición entre modo manual y semiautomático mediante el switch del canal cinco del transmisor.
La consigna de altura estará en función de la posición del stick de aceleración una vez hecho el cambio a modo semiautomático.
Los movimientos angulares del vehículo estarán disponibles en modo automático de altura, ofreciendo el control total del operador.
Para la obtención de resultados se realizan dos experimentaciones. En ambas se realiza una grabación mediante cámara de video para su posterior análisis y obtención de datos experimentales. Con esto es posible llevar a cabo graficas de comportamiento analizando las características más importantes de la respuesta del sistema.
4.3 Resultados experimento 1
[image:80.612.218.395.218.483.2]Para la primera experimentación se asigna una altura de referencia de 80 cm, se comprueba la funcionalidad del vuelo manual, posteriormente se hace el cambio a modo automático de altura. En la figura 4.2 se aprecia el sobre paso máximo generado por esta entrada en el cuadri-rotor.
Figura 4. 2 Máximo sobre impulso experimento 1
Los datos obtenidos de la experimentación 1 son:
Sobre impulso máximo; 7 cm
Tiempo de levantamiento: 2 segundos
Tiempo de asentamiento: 5.4 segundos
Error en estado estacionario: 5 cm
4.3.1
Simulación experimento 1
[image:81.612.198.415.237.511.2]Se identifican las diferencias y similitudes entra la simulación y la experimentación. El modelo utilizado solo considera un grado de libertad del vehículo, no contemplando los movimiento angulares del mismo, esto ya que se asegura que los ángulos serán pequeños mediante la compensación por giroscopios. En la figura 4.3 se aprecia el resultado de la simulación:
Figura 4. 3 Simulación de experimentación 1
4.3.2
Comparación Experimentación-Simulación 1
[image:82.612.77.538.250.527.2]En la figura 4.4 se muestra la gráfica de la respuesta en el tiempo obtenida a partir de los resultados de la experimentación, en comparación con los obtenidos en la simulación. Se verifica que el seguimiento de la curva de simulación es cumplida por el vehículo pero con un retardo, cumpliendo asi los objetivos del máximo sobre impulso y del error en estado estacionario.
Figura 4. 4 Respuesta en el tiempo del sistema teórico y experimental 1
Dado que la plantilla utilizada para la experimentación tiene una resolución de 5 cm, se marcan los límites superior e inferior de la medición, los cuales indican la posición aproximada del vehículo para instantes de tiempo específicos, debido a la incertidumbre en la medición.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 2 4 6 8 10
A lt u ra ( m) Tiempo (s)
Respuesta en el tiempo
Simulacion
Altura (limite inferior)