ANÁLISIS ESTRUCTURAL DEL BASTIDOR DE TRUCK
DEL CONJUNTO CHASIS DE BOGIE DE LOS VAGONES
DEL TRANSPORTE COLECTIVO METRO
SECCIÓN DE ESTUDIOS DE POSGRADO
E INVESTIGACIÓN
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
C O N E S P E C I A L I D A D E N
I N G E N I E R Í A M E C Á N I C A
P R E S E N T A
ING. ALFONSO MENESES AMADOR
ÍNDICE
ÍNDICE
I
ÍNDICE
DE
FIGURAS
VI
ÍNDICE
DE
TABLAS
XI
TERMINOLOGÍA
XIII
RESUMEN
XV
ABSTRACT XVI
OBJETIVO
XVII
JUSTIFICACIÓN XVII
INTRODUCCIÓN XVIII
CAPÍTULO I Generalidades acerca del Bastidor de Truck del
Conjunto Chasis de Bogie del los Vagones del Sistema de
Transporte Colectivo Metro.
1.1 Introducción.
2
1.1.1 Historia del Sistema de Transporte Colectivo Metro de la
Ciudad de México.
3
1.1.2 Composición de los trenes del Sistema de Transporte
Colectivo Metro de la Ciudad de México.
8
1.1.3 Composición del coche motriz con cabina de conducción
9
1.2 Descripción del Conjunto Chasis de bogie
9
1.2.1 Evolución
9
1.3 Bogie con guiado de las cajas de grasa mediante placas de
guarda y motores suspendidos por la nariz
11
1.4 Bogie con motores y transmisión enteramente suspendidos
cerca del eje
13
1.5 Bogie con motores enteramente suspendidos concentrados en
el centro del bogie
14
1.6 Bogie con un motor enteramente suspendidos concentrados en
el centro del bogie
.
14
CAPÍTULO II Conceptos generales y Aspectos teóricos
2.1 Introducción
18
2.2 Teorías de falla
18
2.2.1 Teoría de la tensión principal máxima.
20
2.2.2 Teoría de la deformación longitudinal unitaria máxima.
22
2.2.3 Teoría de la tensión tangencial máxima.
23
2.2.4 Teoría de la energía de deformación.
25
2.2.5 Teoría de la energía de distorsión de Von Mises.
26
2.3 Dinámica y Vibraciones.
30
2.3.1 Periodo.
30
2.3.2 Movimiento armónico simple.
31
2.3.3 Frecuencia natural.
32
2.3.4 Vibración libre.
32
2.3.5 Vibración forzada.
32
2.3.6 Amortiguamiento.
32
2.3.7....Resonancia. 33
2.3.8 Sistema de un solo grado de libertad.
33
2.4 Fatiga.
33
2.4.1 Diagrama S-N.
34
2.4.2 Fatiga en ciclos altos.
35
2.4.3 Factores que modifican el límite de resistencia a la fatiga.
37
2.4.4 Esfuerzos fluctuantes.
37
2.4.5 Resistencia a la fatiga en el caso de esfuerzos fluctuantes.
38
Referencias
41
CAPÍTULO III
Condiciones de operación del bastidor del
conjunto chasis de bogie de los vagones del transporte colectivo
metro.
3.5 Modelización de la pista
48
3.6 Propiedades del material
49
3.7 Cargas de los trenes MP-68.
50
Referencias
51
CAPÍTULO IV
Análisis numérico del bastidor del conjunto chasis
de bogie de los vagones del transporte colectivo metro.
4.1 Tipos de elemento.
53
4.2 Metodología.
57
4.3 Construcción del modelo geométrico.
58
4.4 Análisis estático
59
4.4.1 Condiciones de frontera.
60
4.5 Análisis modal.
62
4.5.1 Condiciones de frontera.
62
4.6 Análisis dinámico con Ls-Dyna.
63
4.6.1 Condiciones de frontera.
65
4.7 Análisis dinámico con interfase Ansys-Adams.
68
4.7.1 Nodos maestros.
69
4.7.2 Exportación de la estructura hacia Adams
.
70
4.7.3 Construcción y simulación del modelo en Adams.
71
4.8 Análisis de fatiga.
75
4.9 Prueba experimental de vibraciones
76
Referencias
78
CAPÍTULO V
Análisis y discusión de resultados
CONCLUSIONES
98
TRABAJO A FUTURO
99
ANEXO
A1 Dibujos.
A2 Macros
100
ÍNDICE DE FIGURAS
Figura 1.1.- Mapa del Sistema de Transporte Colectivo Metro de la Ciudad de México Figura.1.2.- Composición de los trenes del Sistema de Transporte Colectivo Metro de la Ciudad de México
Figura 1.3.- Locomotora BB Figura 1.4.- Locomotora 2D2
Figura 1.5.- Evolución de los bogies
Figura 1.6.- Esquema de bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz
Figura 1.7.- Bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz
Figura 1.8.- Esquema de bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz con barras de tracción
Figura 1.9.- Esquema de bogie con motores y transmisión enteramente suspendidos cerca del eje
Figura 1.10.- Esquema de bogie con motores enteramente suspendidos concentrados en el centro del bogie
Figura 1.11.- Esquema de bogie un motor enteramente suspendido concentrado en el centro del bogie
Figura 2.1.- Tensión equivalente
Figura 2.2.- Círculos de Mohr para tracción pura y tensión cortante pura Figura 2.3.- Teoría de la tensión principal máxima.
Figura 2.4.- Estado tensional simple.
Figura 2.5.- Teoría de la tensión tangencial máxima Figura 2.6.- Elemento en estado de esfuerzo triaxial.
Figura 2.7.- Teoría de la energía de distorsión de Von Mises Figura 2.8.- Representación de las tres teorías de falla.
Figura 2.9.- Diagrama S-N trazado a partir de los resultados de pruebas de fatiga axial con inversión completa
Figura 2.10.- Resultados de fatiga por flexión.
Figura 2.11.- Representación de fluctuación de esfuerzos promedio
Figura 2.12.- Diagramas de fatiga en los que se indican puntos de falla típicos. Figura 2.13.- Diagrama de Goodman modificado.
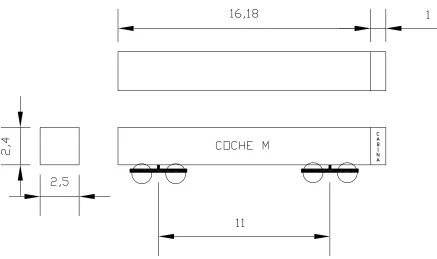
Figura 3.1.- Ejemplo de estructuras macizas Figura 3.2.- Ejemplos de estructuras reticulares Figura 3.3.- Ejemplos de estructuras superficiales. Figura 3.4.- Dimensiones del coche M
Figura 3.5.- Bastidor de truck del conjunto chasis de bogie del sistema de transporte colectivo metro de la ciudad de México.
Figura 3.6.- Topología del coche motor M Figura 4.1.- Elemento SOLID45.
Figura 4.2.- Elemento MASS21 Figura 4.3.- Elemento SOLID164 Figura 4.4.- Elemento MASS166 Figura 4.5.- Elemento BEAM4.
Figura 4.6.- Modelo del vehículo dinámico
Figura 4.14.- Mallado de bastidor de truck del conjunto chasis de bogie en LS-DYNA
Figura 4.15.- Restricciones sobre el bastidor de truck del conjunto chasis de bogie en LS-DYNA
Figura 4.16.- Cargas sobre el bastidor de truck del conjunto chasis de bogie en LS-DYNA
Figura 4.17.- Cargas y aceleraciones aplicadas sobre el Chasis en Ls-Dyna Figura 4.18.- Estructura del chasis de bogie mallado y con nodos maestros Figura 4.19.- Modelo exportado de Ansys hacia Adams
Figura 4.20.- Vista lateral del modelo exportado de Ansys hacia Adams. Figura 4.21.- Conexión de la caja y equipo con el chasis en Adams. Figura 4.22.- Conexión los motores con el chasis en Adams.
Figura 4.23.- Conexión las llantas con el chasis. Figura 4.24.- Conexión las llantas con el pista Figura 4.25.- Modelo del coche M en Adams.
Figura 4.26.- Vista del modelo del coche M en Adams.
Figura 4.27.- Historial de Cargas aplicado al Modelo en Ansys.
Figura.4.28.- Prueba experimental de vibraciones sobre el chasis del coche tipo M. Figura 5.1.- Esfuerzo de Von Mises sobre el chasis para el análisis estático (17.6 MPa). Figura 5.2.- Vista de detalle del esfuerzo de Von Mises sobre el chasis para el análisis estático (17.6 MPa).
Figura 5.3.- Deformación máxima del chasis en condiciones estáticas 0.714 mm. Figura 5.4.- Primer modo de vibrar de la estructura del chasis (168.656 Hz). Figura 5.5.- Segundo modo de vibrar de la estructura del chasis (178.265 Hz) Figura 5.6.- Tercer modo de vibrar de la estructura del chasis (180.734 Hz) Figura 5.7.- Cuarto modo de vibrar de la estructura del chasis (181.559 Hz) Figura 5.8.- Quinto modo de vibrar de la estructura del chasis (182.421 Hz).
Figura.5.9.- Esfuerzos de Von Mises sobre el chasis para condiciones de arranque (34.6 MPa).
Figura 5.10.- Viste de detalle del esfuerzos de Von Mises sobre el chasis para condiciones de arranque (34.6 MPa).
Figura 5.11.- Esfuerzos de Von Mises sobre el chasis para condiciones de frenado (53.8 MPa).
Figura 5.12.- Vista de detalle del esfuerzos de Von Mises sobre el chasis para condiciones de frenado (53.8 MPa)
Figura 5.13.- Esfuerzos de Von Mises sobre el chasis para condiciones de viraje y freno (72.8 MPa).
Figura 5.14.- Vista de detalle del esfuerzo de Von Mises sobre el chasis para condiciones de viraje y freno (72.8 MPa).
Figura 5.15.- Esfuerzos de Von Mises sobre el chasis para condiciones de arranque (34.8 MPa)
Figura 5.16.- Vista de detalle del esfuerzos de Von Mises sobre el chasis para condiciones de arranque (34.8 MPa)
Figura 5.18.- Vista de detalle del esfuerzos de Von Mises sobre el chasis para condiciones de frenado (49.5 MPa).
Figura 5.19.- Esfuerzos de Von Mises sobre el chasis para condiciones de viraje y freno (76.1 MPa).
Figura 5.20.- Vista de detalle del esfuerzos de Von Mises sobre el chasis para condiciones de viraje y freno (76.1 MPa).
ÍNDICE DE TABLAS
Tabla 1.1.- Sistema de Transporte Colectivo Metro Tabla 3.1.- Propiedades mecánicas del material Tabla 3.2.- Cargas de los trenes MP-68 (Kg.)
Tabla 4.1 .- Pesos a los que está sometido el chasis (Kg.) Tabla 5.1.- Resultados de esfuerzos máximos
TERMINOLOGÍA
σf Limite de fluencia
σ1 Tensión principal.
τmáx. Tensión tangencial máxima
εf Deformación longitudinal unitaria máxima
d
u
, Energía de distorsión.u Energía de deformación.
σequiv Tensión equivalente
E Modulo de elasticidad. a Aceleración.
ar Aceleración radial.
Sa Amplitud de esfuerzos alternantes.
σa Amplitud de esfuerzos fluctuante. d Constante del material.
U Daño total por fatiga S Distancia
ε Energía de deformación
σ Esfuerzo
Sy Esfuerzo de cedencia. Se Esfuerzo limite a la fatiga.
σmáx. Esfuerzo máximo.
σmin. Esfuerzo mínimo.
σprom. Esfuerzo promedio. Su Esfuerzo ultimo a tensión. n Factor de seguridad. N Número de ciclos.
MA Número de ciclos permitido a un determinado nivel de amplitud de esfuerzos. ni Número de ciclos soportados a un nivel de carga.
W Peso
r Radio de giro v Velocidad final vo Velocidad inicial.
Ni Vida por fatiga para un nivel de esfuerzos. Nf Vida total por fatiga.
[K] Matriz de rigidez global
{U} Matriz del vector de desplazamiento.
{F} Matriz del vector de fuerza
{M} Matriz de masa.
{C} Matriz de amortiguamiento
εmáx. Deformación longitudinal máxima
µ Modulo de Poisson
τf Tensión de fluencia a cortadura T Periodo
ω Frecuencia circular f Frecuencia
t Tiempo
RESUMEN
En este trabajo es llevado acabo el análisis estructural de un bastidor de truck del conjunto chasis de bogie de un vagón del sistema colectivo metro basado en análisis empleando el método del elemento finito y simulaciones dinámicas. La determinación de los esfuerzos en el chasis es importante en la realización de las tareas de mantenimiento y prevención de fallas. El desarrollo del trabajo involucró la interacción del: dibujo asistido por computadora para la realización del modelo tridimensional del chasis; el análisis dinámico de sistemas mecánicos; además, la determinación de esfuerzos empleando el método de elementos finitos. Para lo cual se utilizaron programas comerciales como lo son Unigraphics para el modelado tridimensional, Ansys para el análisis estático y para el análisis dinámico se siguieron dos metodologías una haciendo uso del programa Ls-Dyna y otra utilizando la interfase entre los programas Ansys y Adams.
Los resultados muestran que se tienen un factor de seguridad suficientemente grande en todo el chasis por lo que no ocurrirán deformaciones permanentes con lo que respecta a los análisis dinámicos arrojan resultados similares por las dos metodologías usadas para este estudio.
ABSTRACT
In this work the stress analysis of a bogie frame of a subway wagon based on finite element analysis and dynamic simulation is carried out. Determination of the stress fields in the chassis is important in the accomplishment of the maintenance task and failure prevention. The interaction of computer aided design to the development of three-dimensional chassis, dynamic analysis of mechanical systems and stress analysis using finite element method was take account. Commercial software’s as Unigraphics to the development of three dimensional chassis, Ansys to the static analysis and for the dinamic analysis were used two methodology one using the software Ls Dyna and another using the interface between Adams and Ansys.
OBJETIVO
Localizar y analizar los puntos donde se presentan mayores esfuerzos en el chasis del vagón tipo M del Sistema Colectivo Metro de la Ciudad de México, por medio del Método de Elementos Finitos. En el desarrollo del trabajo se involucró la interacción del dibujo asistido por computadora para la realización del modelo tridimensional del chasis, el análisis dinámico de sistemas mecánicos para la simulación dinámica y la determinación de esfuerzos empleando el Método de Elementos Finitos. Para esto, se ocuparon programas comerciales como lo son Unigraphics, Adams, Ls-Dyna y Ansys respectivamente. La simulación dinámica presenta una parte esencial para la realización de este estudio, ya que la estructura que se analiza se desarrolla con cargas variables con respecto del tiempo por lo que se utilizaron dos metodologías para este estudio en condiciones dinámicos; la primera metodología utilizada fue haciendo uso del programa comercial LS-DYNA y la segunda metodología fue realizada haciendo uso del programa especializado en simulación dinámica Adams con la interfase con el programa para el análisis de elementos finitos ANSYS puesto que es una herramienta muy útil para un análisis complejo para el cual se involucran varios parámetros como lo es el trabajo de investigación que aquí se presenta.
También se analiza la estructura del chasis tipo M con un análisis modal para determinar si puede entrar en resonancia a causa de la frecuencia de operación del sistema.
JUSTIFICACIÓN
Un análisis de los componentes del metro con uno de los medios mas especializados con los que se cuentan hoy en día (elementos finitos) se hace necesario si tomamos en consideración que el Sistema de Transporte Colectivo Mero de la Ciudad de México cuenta con 201.3 Km.de vías dobles, 11 líneas de operación, 175 estaciones, 269 trenes cada tren formado por 9 coches y más de 4.2 millones de usuarios transportados diariamente.
Para los millones de personas que hacen uso de este medio de transporte para trasladarse en la Ciudad de México necesitan tener plena confiabilidad del vehículo del cual hacen uso diariamente ya que una falla en algún componente del Metro produciría un accidente de dimensiones catastróficas.
Durante la década de los 80 el transporte eléctrico de la ciudad no solo se concentro en el Metro, ya que fue en este tiempo cuando el Sistema de Transporte Eléctrico (STC), comenzó el reemplazo de los antiguos tranvías PCC, por uno de los símbolos característicos de esta institución, el trolebús, siendo la ultima adquisición los modernos trolebuses serie 9000, que iniciaron su operación en 1998.
Fue en el año de 1984 que los últimos tranvías PCC fueron retirados del servicio que prestaban en la antigua línea de Xochimilco, para dar paso al tren ligero . En 1985 se inicio un proyecto para renovar el servicio en esta línea que consistió en dos etapas. Primero se acondiciono el tramo Tasqueña-Estadio Azteca y para 1988 , el de Huipulco-Xochimilco.
Los primeros vehículos que dieron vida al tren ligero utilizaron las carretillas de los antiguos tranvías PCC. No obstante fueron sustituidos en 1995 por modernos trenes modelos TE – 90 y TE – 95.
En el año de 1983 comienza la tercera etapa de expansión del Metro con la conclusión de las líneas 1,2 y 3 y las construcción de las líneas 6 y 7, con lo que este Organismo incrementa su longitud a 114.7 Km. Y 105 estaciones en 1985. Un año mas tarde comenzaría su cuarta etapa con la ampliación de las recién construidas líneas 6 y 7 , además de iniciarse la construcción de la línea 9. En este periodo el Metro aumentaría su extensión 16 Km. Y 16 estaciones mas.
Finalmente en el año de 1994 se inicia la construcción de la línea B, la cual fue terminada en su totalidad en el año 2000, tiempo en el que se inauguró el segundo tramo para completar la obra. Así se configura el rostro actual del Metro de La ciudad de México con un total de 269 trenes, 201.3 Km. De vías dobles, 1 líneas de operación, 175 estaciones, 7 talleres de mantenimiento, mas de 14 mil trabajadores y mas de 5 millones de usuarios transportados diariamente.
Un dato interesante es que los señalamientos de la red son sumamente iconográficos. Ocurrió así porque en la época en que dio inicio la construcción de la primera línea, la tasa de analfabetismo de México era muy alta, y las personas podrían orientarse más fácilmente mediante un código de colores y signos visuales y también inspirados en los iconos de los juegos olímpicos del 68. Cada una de las estaciones tiene un emblema que se relaciona con:
• los sitios de referencia que se localizan en las inmediaciones de las estaciones (por ejemplo, Salto del Agua);
• la toponimia (por ejemplo, Coyoacán) y
• la historia del rumbo (por ejemplo, GeneralAnaya).
A continuación se muestran las líneas con las que cuenta la Red de Transporte Colectivo Metro de la Ciudad de México y las partes que son unidas por tales líneas.
LINEAS DEL METRO
•
1
Línea 1: Observatorio – Pantitlán
•
2
Línea 2: Cuatro Caminos – Tasqueña
•
3
Línea 3: Indios Verdes – Universidad
•
4
Línea 4: Santa Anita – Martín Carrera
•
5
Línea 5: Politécnico – Pantitlán
•
6
Línea 6: El Rosario – Martín Carrera
•
7
Línea 7: El Rosario – Barranca del Muerto
•
8
Línea 8: Garibaldi – Constitución de 1917
•
9
Línea 9: Tacubaya – Pantitlán
•
10
Línea A: Pantitlán – La Paz
•
11
Línea B: Buenavista – Ciudad Azteca
•
12
Tren Ligero Xochimilco: Tasqueña – Xochimilco
CAPÍTULO
I
GENERALIDADES ACERCA DEL
BASTIDOR DE TRUCK DEL CONJUNTO
CHASIS DE BOGIE DEL LOS VAGONES
DEL SISTEMA DE TRANSPORTE
COLECTIVO METRO
1.1 INTRODUCCIÓN
En la Ciudad de México existen diferentes medios de transporte urbano, en los cabe mencionar el Sistema de Transporte Colectivo Metro de la Ciudad de México, tren ligero, trolebús y metrobús principalmente [1.1].
[image:20.612.133.482.234.449.2]En la tabla 1.1 se muestran las estadísticas del Sistema de Transporte Colectivo Metro de la Ciudad de México del año 2000 la cual muestra la longitud de vías en servicio, los trenes en servicio, la distancia recorrida, los pasajeros transportados y la energía eléctrica consumida.
Tabla 1.1.- Sistema de Transporte Colectivo Metro[1.2].
1.1.1 Historia del Sistema de Transporte Colectivo Metro de
la Ciudad de México
El Metro de la Ciudad de México, cuyo nombre oficial es Sistema de Transporte Colectivo-Metro, brinda Transporte público a extensas áreas del Distrito Federal y parte del Estado de México. El metro de la ciudad de México transporta diariamente a más de 4.2 millones de personas, siendo el tercero en el mundo por la cantidad de pasajeros que transporta al día, superado solamente por Moscú y Tokio [1.3].
A continuación se da una reseña de las líneas por las que circula el Sistema de Transporte Colectivo Metro de la ciudad de México.
Línea 1: Observatorio – Pantitlán
Color de la línea: rosa
Longitud de vía de pasajeros: 16.654 Km. Longitud total de vía: 18.828 Km.
Material rodante: trenes MP-68, hechos en Francia en 1968; trenes NE-92, hechos en España en 1992
Estaciones: 20
Tipo de construcción: línea predominantemente subterránea, la excepción es la terminal Observatorio.
Dirección predominante: poniente a oriente, por el centro de la ciudad Inaugurada:
Línea 2: Cuatro Caminos – Tasqueña
Color de la línea: azul
Longitud de vía de pasajeros: 20.713 Km. Longitud total de vía: 23.431 Km.
Material rodante: 45 trenes NM-02 nuevos, hechos en México en 2004. Estaciones: 25
Tipo de construcción: de Tasqueña a San Antonio Abad, superficial; de Pino Suárez a Panteones, subterránea. Cuatro Caminos es una terminal superficial
.
Dirección predominante: noroeste a sur, por el centro de la ciudad Inaugurada:
1 de agosto de 1970: de Pino Suárez a Tasqueña 14 de septiembre de 1970: de Pino Suárez a Tacuba 22 de agosto de 1984: de Tacuba a Cuatro Caminos
Línea 3: Indios Verdes – Universidad
Color de la línea: verde caqui
Longitud de vía de pasajeros: 21.278 Km. Longitud total de vía: 23.609 Km.
Estaciones: 21
Tipo de construcción: Universidad es una terminal superficial. De Copilco a La Raza, subterránea. De Potrero a Indios Verdes, combina andenes superficiales con corredores subterráneos de pasajeros.
Dirección predominante: norte a sur, por el centro de la ciudad Inaugurada:
20 de noviembre de 1970: de Tlatelolco a Hospital General 25 de agosto de 1978: de Tlatelolco a La Raza
1 de diciembre de 1979: de La Raza a Indios Verdes 7 de junio de 1980: de Hospital General a Centro Médico 25 de agosto de 1980: de Centro Médico a Zapata 30 de agosto de 1983: de Zapata a Universidad
Línea 4: Santa Anita – Martín Carrera
Color de la línea: verde agua
Longitud de vía de pasajeros: 9.363 km Longitud total de vía: 10.747 km
Material rodante: por la baja afluencia de pasajeros a esta línea, el STC introdujo trenes adaptados de sólo seis carros.
26 de mayo de 1982: de Candelaria a Santa Anita
Esta es relativamente de las 11 líneas la más corta, pero en el Plan Maestro del Metro se pretende extender hasta la colonia Santa Clara en el Edo. de México.
Línea 5: Politécnico – Pantitlán
Color de la línea: amarillo
Longitud de vía de pasajeros: 14.435 km Longitud total de vía: 15.675 km
Estaciones: 13
Tipo de construcción: de Politécnico a La Raza las estaciones son de superficie con túneles de acceso, las estaciones Misterios y Valle Gómez son subterráneas, de Consulado a Oceanía son de superficie con túneles de acceso, Terminal Aérea y Hangares son subterráneas y Pantitlán es de superficie.
Dirección predominante: norte a este Inaugurada:
19 de diciembre 1981: de Pantitlán a Consulado 1 de julio 1982: de Consulado a La Raza
30 de agosto 1982: de La Raza a Politécnico
Línea 6: El Rosario – Martín Carrera
Color de la línea: escarlata
Longitud de vía de pasajeros: 11.434 km Longitud total de vía: 13.947 km
Material rodante: por la baja afluencia de pasajeros a esta línea, el STC introdujo trenes adaptados de sólo seis carros.
Estaciones: 11
Tipo de construcción: "El Rosario" es una terminal superficial. De Tezozomoc a Martín Carrera, esta línea es subterránea.
Dirección predominante: poniente a oriente, en el norte de la ciudad Inaugurada:
Línea 7: El Rosario – Barranca del Muerto
Color de la línea: naranja
Longitud de vía de pasajeros: 17.011 km Longitud total de vía: 18.784 km
Estaciones: 14
Tipo de construcción: El Rosario es una terminal superficial. De AquilesSerdán a
Barranca del Muerto, esta línea es subterránea. Esta línea es también la más profunda de todo el
STC-
Metro(más de 20 m bajo tierra).
Dirección predominante: norte a sur, al poniente del centro de la ciudad Inaugurada:
20 de diciembre de 1984: de Tacuba a Auditorio 22 de agosto de 1985: de Auditorio a Tacubaya 19 de diciembre de 1985: de Tacubaya a Barranca 29 de diciembre de 1988: de Tacuba a El Rosario
Línea 8: Garibaldi – Constitución de 1917
Color de la línea: verde claro
Longitud de vía de pasajeros: 16.679 km Longitud total de vía: 20.078 km
Estaciones: 19
Dirección predominante: del centro de la ciudad al sureste Inaugurada: 20 de julio de 1994
Longitud de vía de pasajeros: 13.033 km Longitud total de vía: 15.375 km
Estaciones: 12
Dirección predominante: de poniente a oriente, por el sur del centro de la ciudad Inaugurada:
26 de agosto de 1987: de Pantitlán a Centro Médico 29 de agosto de 1988: de Centro Médico a Tacubaya
Línea A: Pantitlán – La Paz
Color de línea: morado
Longitud de vía de pasajeros: 14.893 km Longitud total de vía: 23.722 km
Material rodante: trenes FM-86, hechos en México en 1986; trenes FM-95A, hechos en México en 1998 y 1999. Los trenes de la Línea A usan tracción ferroviaria tradicional y toman corriente eléctrica mediante un pantógrafo. Todas las líneas "numeradas", así como la Línea B, corren con tracción neumática.
Estaciones: 10
Dirección predominante: oriente a extremo oriente Inaugurada:
12 de agosto de 1991: de Pantitlán a La Paz
Línea B: Buenavista – Ciudad Azteca
Color de la línea: verde sobre plata
Longitud de la vía de pasajeros: 20.278 km Longitud total de vía: 23.722 km
Estaciones: 21
Dirección predominante: del centro de la ciudad al noreste remoto Inaugurada:
En la figura 1.1 se muestra la distribución de la red de Transporte Colectivo Metro de la Ciudad de México, la cual contiene la ubicación de las líneas descritas anteriormente.
Fig.1.1 Mapa del Sistema de Transporte Colectivo Metro de la Ciudad de México
1.1.2
Composición de los trenes del Sistema de Transporte
Colectivo Metro de la Ciudad de México.
R .- Coche remolque.
N.- Coche motriz intermedio (sin cabina de conducción). PR.- Coche remolque equipado con pilotaje automático.
Fig.1.2- Composición de los trenes del Sistema de Transporte Colectivo Metro de la ciudad de México.
1.1.3. Composición del coche motriz con cabina de
conducción.
Como se puede observar en la figura 1.2 el coche M se encuentra en los extremos del tren y en él se encuentra la cabina de conducción.
Cada coche M cuenta con cuatro motores de tracción de una capacidad en régimen continuo de 128 KW dispuesto en el bogie (dos motores en cada bogie) estor motores proporcionan fuerzas tractivas y para el frenado operan como generadores eléctricos produciendo una desaceleración de 0.9 m/s2, 200 de estos trenes pueden hacer este tipo de frenado regenerativo. Para este estudio se toman los trenes que pueden hacer este tipo de frenado [1.4].
1.2 DESCRIPCIÓN DEL CONJUNTO CHASIS DE
BOGIE
1.2.1 Evolución
Comenzaremos por considerar el historial de los bogies motores desde 1945 hasta nuestros días. En 1945, Francia poseía dos tipos de locomotoras:
1.- Las BB, 105 Km/h figura 1.3.
Fig. 1.3.- Locomotora BB[1.6]. 2.- Las 2D2, hasta 130 Km/h figura 1.4.
Fig. 1.4 .- Locomotora 2D2[1.6]
La 2D2, reminiscencia de las locomotoras de vapor para velocidad, tenia un bogie directo en cada extremo para utilizar la locomotora en los dos sentidos, para tener una buena estabilidad en vía y para no sobrepasar la carga limite sobre los ejes motores.
Posteriormente el progreso alcanzado en su construcción fue tal que se pudo prescindir del bogie motor.
La locomotora BB venía prestando desde hace mucho tiempo grandes servicios, pero la estabilidad sobre la vía no permitía ir por encima de los 105 Km/h [1.6].
Fig. 1.5.- Evolución de los bogies[1.6]
1.3 BOGIE CON GUIADO DE LAS CAJAS DE GRASA
MEDIANTE PLACAS DE GUARDA Y MOTORES
SUSPENDIDOS POR LA NARIZ.
[image:29.612.86.529.61.364.2]La masa no suspendida, muy importante, tanto vertical como transversalmente, está sujeta a los movimientos entretenidos o irregulares que le imprime la vía. Los movimientos no pueden ser amortiguados por el bastidor del bogie, relativamente ligero. De aquí se derivan algunas perturbaciones que afectan a la estabilidad (figura 1.6).
Así fue la evolución del bogie para trenes hasta llegar al bogie motor que se usa actualmente en la red de Transporte Colectivo Metro de la Ciudad de México para el cual se hace un análisis estructural del chasis de dicho bogie como ya se comento anteriormente.
Es posible mejorar la adherencia estática disponiendo los motores en voladizo sobre el eje (figura 1.7), pero aparecen unos graves inconvenientes de orden dinámico a causa de la disimetría y la importancia de las masas situadas en los extremos del bogie.
[image:30.612.93.502.321.564.2]Se evitan inconvenientes empleando unas barras de tracción bajas entre la caja y el bogie, que llevan el arrastre a un punto ficticio situado a nivel del carril (figura 1.8).
Fig. 1.8.-Esquema de bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz con barras de tracción [1.6].
1.4 BOGIE CON MOTORES Y TRANSMISIÓN
ENTERAMENTE SUSPENDIDOS CERCA DEL EJE.
Se reduce al máximo la masa vertical no suspendida. Se reduce el peso del motor puesto que ya no lleva cojinetes de suspensión. Los ejes son mas sencillos y mas robustos porque ya no llevan tampoco ruedas de engrane, por otra parte, los cojinetes de suspensión trabajan mal en la suspensión por la nariz (figura 1.9).
1.5 BOGIE CON MOTORES ENTERAMENTE
SUSPENDIDOS CONCENTRADOS EN EL CENTRO
DEL BOGIE.
La masa no suspendida transversalmente tiene teóricamente una importancia todavía mayor que verticalmente, pues, tratándose de vías clásicas, la condición de deformación es siempre la mas severa.
La masa no suspendida transversalmente puede reducirse si se toma el motor no ya sobre el bogie, sino sobre la caja. Es preciso entonces emplear unos dispositivos capaces de asegurar la transmisión del par que permitan, al mismo tiempo, un desplazamiento transversal importante entre el eje y la parte suspendida (figura 1.10).
Fig. 1.10.-Esquema de bogie con motores enteramente suspendidos concentrados en el centro del bogie [1.6].
1.6 BOGIE CON UN MOTOR ENTERAMENTE
SUSPENDIDOS CONCENTRADOS EN EL CENTRO
DEL BOGIE.
Referencias
[1.1]. Gámez Valenzuela Isabel Esteban,”Análisis Estructural del Carro Guiado de un Autobús Comercial”, Tesis de Maestría, Instituto Politécnico Nacional, México D.F.
[1.2]. “Instituto Nacional de Estadística Geografía e Informática, México, Pagina de Internet http//www.inegi.gob.mx
.
[1.3] Pagina Oficial del Sistema de Transporte Colectivo Metro de la Ciudad de México
.
[1.4] Especificaciones del Sistema de Transporte Colectivo Metro de la Ciudad de México.
[1.3]. William W. Hay, “Ingeniería del Transporte”, ED. Limusa, pp. 19-43, 1994.
CAPÍTULO
II
CONCEPTOS GENERALES Y ASPECTOS
TEÓRICOS
2.1
INTRODUCCIÓN.
El análisis de esfuerzos es importante para evaluar la resistencia de un elemento de máquina al aplicarle cargas externas y determinar si el elemento de máquina es confiable bajo esas cargas ya que cargas externas dan lugar a esfuerzos internos en el elemento y en consecuencia pueden causar que el elemento falle.
2.2
TEORÍAS DE FALLA
Al diseñar o analizar elementos mecánicos que resistan las fallas se debe estar seguro de que los esfuerzos internos no rebasen la resistencia del material [2.1]. Si el material es dúctil lo que más interesa es la resistencia de fluencia, ya que una deformación permanente seria considerada como falla.
Muchos de los materiales más frágiles o quebradizos, como los hierros colados, no poseen un punto de fluencia, así que debe utilizarse la resistencia última como criterio de falla. Las resistencias de los materiales dúctiles son casi las mismas a tensión que a compresión.
Desafortunadamente ni un criterio de fluencia ah sido establecido que prediga exactamente la fluencia para todos los materiales. Sin embargo, la iniciación de la fluencia en metales dúctiles puede ser predicha razonablemente bien por el criterio de esfuerzo cortante máximo o por el criterio de la energía de distorsión de Von Mises
Un criterio de fluencia puede ser algún estado descriptivo que defina condiciones por las cuales la fluencia ocurrirá. Esta puede ser expresada en términos de cantidades especificas, tales como el estado de esfuerzos, el estado de deformación, una cantidad de energía de deformación, o otros[2.2].
Sometiendo a una probeta de material dúctil a un esfuerzo de tracción se crea en el material un estado tensional simple. Si la carga aplicada a la probeta es gradualmente creciente, alcanzará un determinado valor para el cual el material comienza a experimentar deformaciones plásticas. Se dice que el material comienza a fluir.
En un ensayo a tracción de un material dúctil hay seis
magnitudes que cuando empieza la fluencia se alcanzan
simultáneamente, tomando cada una de ellas los siguientes valores.
1.- La tensión principal alcanza el límite de fluencia a tracción del material
σ
f. Esta tensión principal es máxima pues las otras dos son nulas.σ
1=
σ
f --- (2.1)2.- La tensión tangencial máxima toma el valor
E
f
σ
E
u f f f
2 2
1
σ
ε
=σ
2= --- (2.4)
5.- La energía de distorsión , esto es, la energía debida al cambio de la forma, absorbida por unidad de volumen, es:
d
u
23
1
f dE
u
=
+
µ
σ
--- (2.5)6.- La tensión tangencial octaédrica alcanza el valor
τ
σ
f0
.
47
σ
f3
2
0
=
=
---(2.6)Estas seis magnitudes alcanzan los valores indicados simultáneamente en el ensayo a tracción que origina en el material un estado tensional simple. Pero si el estado tensional es doble o triple estos seis valores no se alcanzarán simultáneamente. Surge entonces la necesidad de establecer si alguna de estas magnitudes puede considerarse limitativa de las cargas que actúan sobre una pieza de material elástico para que no se produzcan en las mismas deformaciones plásticas.
Cada uno de los valores indicados que se obtienen en el ensayo a tracción han sugerido otras tantas teorías o criterios para predecir cuando el estado tensional no es simple.
Conviene hacer algunas observaciones previas al estudio de cada uno de estos criterios. En primer lugar, en la actualidad no existe una teoría que se adapte completamente al comportamiento real de cualquier material elástico. Sin embargo si existen teorías que son aplicables a grupos de materiales específicos.
Por otra parte, en el ensayo a tracción que se ha descrito anteriormente, se ha considerado un material dúctil, pero existen también materiales frágiles cuya tensión límite es la tensión de rotura. Por eso, más que decir que el material comienza un comportamiento no elástico, tiene más sentido que se diga que el material alcanza un estado límite [2.3].
Si se somete a una probeta de determinado material a un ensayo de tracción, se puede obtener el valor de la tensión última
σ
u, bien por fluencia si se trata de una material dúctil, o bien por fractura si el material es frágil. Si en el mismo material, estando sometido a tracción uniaxial, la tensión esσ
, es evidente que la relación entreσ
u yσ
indicará el grado de seguridad de su estado terminal. De ahí que se define como coeficiente de seguridad en la relación: nσ
σ
uLo que interesa es poder reducir cualquier estado tensional triple o doble a uno simple que sirva de comparación. Si se tiene un estado tensional triple en el que las tensiones principales son
σ
1,σ
2 yσ
3, supóngase que se multiplican todas las cargas que producen el estado tensional por un mismo número , que se va aumentando hasta que las tensiones principales en el punto que se considera, que seránn
1
σ
n , n
σ
2 yn
σ
3,respectivamente, produzcan un estado límite. Es evidente que es el coeficiente de seguridad para un estado tensional simple y ahora lo es para un estado triple.
n
Pues bien, se define como tensión equivalente,
σ
equiv, la que existiría en una probeta de ese material sometido a tracción, tal que el coeficiente de seguridad del estado tensional dado y el de la probeta a tracción fuera el mismo figura 2.1.Fig. 2.1 Tensión equivalente
De esta forma, cuando el material alcanza su estado límite la tensión equivalente coincide con la tensión última
σ
u y ésta será igual al límite de fluenciaσ
f en el caso de materiales dúctiles, o igual a la tensión de roturaσ
r si se trata de materiales frágiles [2.3].Cuando se utiliza una teoría particular de falla, primero es necesario establecer el estado de esfuerzo en puntos del miembro en donde son máximos, esto se puede hacer utilizando los fundamentos de la mecánica y aplicando los factores de concentración de esfuerzo en los casos donde sean aplicables. Y una vez que se ha hecho esto se determinan entonces los esfuerzos principales en estos puntos críticos, en vista de que cada una de las teorías de falla se basan en el conocimiento del esfuerzo principal [2.4].
2.2.1 Teoría de la tensión principal máxima
a torsión es menor que la que se obtiene a tracción, se infiere que la existencia de tensiones tangenciales relativamente grandes en un punto invalida esta teoría.
(a) (b)
Fig. 2.2.-Círculos de Mohr para tracción pura y tensión cortante pura.
Pese a todo, esta teoría da resultados que concuerdan bastante bien con la realidad en el caso de materiales frágiles [2.5].En una prueba de tensión, la fractura ocurre cuando elesfuerzo normal alcanza el esfuerzo último. Asimismo, en una prueba de torsión, la fractura frágil se presenta debido a un esfuerzo de tensión máximo puesto que el plano de fractura en un elemento está a 45º con respecto a la dirección cortante.. Los experimentos han demostrado además que durante la torsión la resistencia del material en cierto modo no se ve afectada por la presencia del esfuerzo de compresión principal asociado, perpendicular al esfuerzo de tensión principal.
En consecuencia, el esfuerzo de tensión necesario para fracturar una probeta durante una prueba de torsión es casi el mismo que se necesita para fracturar una probeta sometida a tensión simple.
Si el material se somete a esfuerzo plano, es necesario que
1
1
σ
σ
=u
σ
σ
2 = --- ( 2.8 )
Fig. 2.3.- Teoría de la tensión principal máxima.
2.2.2. Teoría de la deformación longitudinal unitaria máxima
Esta teoría conocida con el nombre de la teoría de Saint-Venant [2.3], expresa que el estado límite en un punto de un cuerpo en el que existe un estado tensional cualquiera comienza cuando la deformación longitudinal unitaria máxima es igual al valor
ε
u obtenido en el ensayo a tracción cuando el material alcanza la tensión última.E
n n
σ
ε
= --- (2.9)Como la expresión de la deformación longitudinal máxima es
(
)
[
]
E E uσ
σ
σ
µ
σ
ε
max = 1 1 − 2 + 3 = --- (2.10)La tensión equivalente será:
(
2 31
µ
σ
σ
)
σ
σ
equiv=
−
+
--- (2.11)De ser acertada esta teoría para materiales dúctiles, en un punto interior al sólido elástico, en el que existiera un estado tensional simple tal como el indicado en la figura 2.4 (a), empezaría la fluencia cuando la tensión principal
σ
1 es igual aσ
f, pero si el estado tensional fuera el indicado en la figura 2.4 (b), como la expresión de la deformación longitudinal unitaria en la dirección deσ
1 es:E E
2
1
µ
σ
σ
ε
= − --- (2.12)
(a) (b) Fig. 2.4.- Estado tensional simple.
Pero si la tensión
σ
2 es de compresión, la deformación longitudinal unitaria sería ahora:E E
2
1
µ
σ
σ
ε
= + y la fluencia se iniciará para un valor deσ
1 inferior aσ
f . Esta teoría, igualmente a lo que ocurre con la tensión principal máxima, es aceptable cuando el material rompe por fractura frágil, pero no lo es cuando la acción anelástica se produce por fluencia [2.3].2.2.3, Teoría de la tensión tangencial máxima
Con la idea de los materiales fallan por cortante, Henri Tresca [2.4] propuso en 1868 la teoría del esfuerzo cortante máximo o criterio de Cedencia de Tresca.
Se emplea únicamente para predecir la fluencia y, por lo tanto, se aplica solo a los materiales dúctiles. Esta teoría se puede utilizar para predecir el esfuerzo de falla de un material dúctil sujeto a cualquier tipo de carga. La teoría del esfuerzo cortante máximo expresa que el estado límite en un punto de un cuerpo en el que existe un estado tensional cualquiera comienza cuando la tensión tangencial máxima alcanza un valor igual al alcanzado en el ensayo a tracción cuando se llega a la tensión límite, es decir cuando
2 2 3 2 max u
σ
σ
σ
τ
= − = --- (2.13)o bien
u
σ
σ
σ
1−
3=
--- (2.14)Esta teoría es razonablemente aceptable para materiales dúctiles sometidos a estados de tensión en los que se presentan tensiones tangenciales relativamente grandes. Quiere decir que la tensión límite coincide con el límite de fluencia
σ
f, por lo que la expresión (2.14) sería:f
σ
σ
σ
1−
3=
--- (2.15)Esto equivale a decir que la tensión de fluencia a cortadura no debe exceder a la mitad del valor de la tensión de fluencia a tracción.
--- (2.16)
Para un estado triple que no sea límite, la tensión equivalente
será:
3
1
σ
σ
σ
equiv=
−
--- (2.17)En ensayos a torsión se obtiene como valor medio aproximado de la tensión de fluencia a cortadura
τ
f=
0
.
57
σ
f , lo que nos indica que para tal estado tensional la teoría de Tresca acusa un error de un 15 por 100 aproximadamente en sentido favorable a la seguridad [2.3].Para los estados tensionales planos, la expresión del esfuerzo equivalente se reduce a:
2
1
σ
σ
σ
equiv=
−
--- (2.18)Con estos resultados la teoría del esfuerzo cortante máximo para esfuerzo plano se puede expresar para dos esfuerzos principales en el plano cualesquiera como
σ
1 yσ
2 mediante los siguientes criterios:---- (2.19) f f
σ
σ
σ
σ
=
2 1=
σ
1,σ
2 tienen los mismos valoresf
σ
σ
σ
1 − 2 =σ
1,σ
2 tienen signos opuestosEn la Figura 2.5 se da una gráfica de estas ecuaciones. Claramente, si cualquier punto del material se somete a esfuerzo plano, y sus esfuerzos principales en el plano se representan con una coordenada (
σ
1,σ
2) marcada en o fuera del área hexagonal mostrada en esta figura, el material cederá en el punto y se dice que ocurre la falla [2.4].Expresa esta teoría, propuesta por Beltrami y por Haigh [2.3], que el estado límite en un punto de un cuerpo en el que existe un estado tensional cualquiera comienza cuando la energía de deformación absorbida por unidad de volumen cuando el material alcanza la tensión última en el ensayo a tracción.
Esta teoría difiere de todas las que se han expuesto anteriormente, ya que aquéllas se comparaban valores de tensiones o deformaciones, mientras que en éste se comparan los valores que toma una magnitud escalar, como es la energía de deformación o potencial interno, en estado triple y en estado simple equivalente.
La formulación de este criterio se hace de forma inmediata teniendo en cuenta la expresión de la energía de deformación por unidad de volumen, particularizada para el caso que los ejes del sistema de referencia sean coincidentes con los ejes principales.
(
)
(
)
E
E
E
u
u2
2
1
2 3 1 3 2 2 1 2 3 2 2 2 1σ
σ
σ
σ
σ
σ
σ
µ
σ
σ
σ
+
+
−
+
+
=
=
--- (2.20)o bien
--- (2.21)
(
2 3 1 3 2 2 1 2 3 2 2 21
σ
σ
2
µ
σ
σ
σ
σ
σ
σ
σ
uσ
+
+
−
+
+
)
=
)
La tensión equivalente en este criterio es(
1 2 2 3 1 32 3 2 2 2
1
σ
σ
2µ
σ
σ
σ
σ
σ
σ
σ
σ
equiv = + + − + + --- (2.22)De aceptar esta teoría para materiales dúctiles, el valor dado por u en la expresión anterior no puede exceder el valor
E
f
2 2
σ
sin que comience a fluir el material, ya que para estos materiales
σ
u=
σ
f .(
2 3 1 3 2 2 1 2 3 2 2 21
σ
σ
2µ
σ
σ
σ
σ
σ
σ
σ
fσ
+ + − + +)
= --- (2.23)En el ensayo a torsión, en el que
σ
1=
σ
3=
τ
;σ
2 =0, según este criterio, la plastificación comenzaría cuando la tensión tangencial máxima verificara--- (2.24)
(
)
2 22 2
2 2 21
f
σ
τ
µ
µτ
τ
τ
+ + = + =(
)
f f f fσ
σ
µ
σ
τ
0.635 . 2 1
2 + = =
= --- (2.25)
Valor que es superior al obtenido en los ensayos experimentales,
τ
f=
0
.
577
τ
f.La falta de coincidencia de los resultados de aplicar este criterio, con los obtenidos en los ensayos experimentales, estriba en que el criterio de Betrami y Haigh vincula toda la energía de deformación al proceso de plastificación [2.3].
2.2.5. Teoría de la energía de distorsión de Von Mises
Propuesta por Von Mises fue el fruto de los trabajos analíticos de Huber y Henchy y como la del esfuerzo cortante máximo, ésta se emplea sólo para definir el principio de fluencia. La teoría de la energía de distorsión se originó a partir de la observación de que materiales dúctiles, sometidos a esfuerzos hidrostáticos (de igual tensión o compresión), tenían resistencia de fluencia muy superiores a los valores obtenidos por el ensayo a tensión simple. Así, se postulo que la fluencia no era, de ninguna manera, un fenómeno de tensión o compresión simples, sino más bien que estaba relacionada de algún modo con la distorsión (o deformación angular) del elemento esforzado.
Esta teoría expresa que el estado límite en un punto de un cuerpo en el que existe un estado tensional cualquiera comienza cuando la energía de distorsión absorbida por unidad de volumen del material alcanza la tensión límite en el ensayo a tracción.
Para llegar a la formulación analítica de esta teoría se inicia conociendo cuál es la expresión de la energía de distorsión en un estado tensional triple, en el que las tensiones principales son
σ
1,σ
2,σ
3.Apoyándose en la propiedad de que la energía de deformación por unidad de volumen se puede descomponer en dos partes, una de ellas debida al cambio de volumen y otra vinculada a la distorsión o cambio de forma a volumen constante de dicho volumen unitario, como esquemáticamente se indica en la figura 2.6
v
u
d
u
(
12 22 32)
(
1 2 2 3 1 3)
2
1
σ
+
σ
+
σ
−
µ
σ
σ
+
σ
σ
+
σ
σ
=
+
=
E
E
u
u
u
v d --- (2.27)La debida al cambio de volumen es:
u
vσ
mε
m2
1
3
=
--- (2.28)Y como por la ley de Hooke
(
)
[
σ
µ
σ
σ
]
σ
(
µ
)
ε
= 1 − + = 1−2E E m m m m
m --- (2.29)
queda:
(
µ
) (
σ
σ
σ
) (
µ
σ
2
1
6
2
1
2
3
2 1 2 3 2−
+
+
=
−
=
)
E
E
u
m --- (2.30)La energía por unidad de volumen debida al cambio de forma se puede obtener como diferencia entre y u
u
v.(
σ
σ
σ
)
µ
(
σ
σ
σ
σ
σ
σ
) (
σ
σ
σ
) (
1
2
µ
)
6
2
1
1 2 3 23 1 3 2 2 1 2 3 2 2 2 1
−
+
+
−
+
+
−
+
+
=
−
=
E
E
E
u
u
u
d v --(2.31)
Simplificando se obtiene:
(
) (
) (
[
2]
1 3 2 3 2 2 2 1
6
1
+
µ
σ
−
σ
+
σ
−
σ
+
σ
−
σ
)
=
E
u
d --- (2.32)particularizada para un estado tensional simple, resulta:
(
)
21 2 1 2 1
3
1
6
1
µ
σ
σ
µ
σ
E
E
u
d+
=
+
+
=
--- (2.33)Por tanto, según esta teoría para materiales dúctiles no aparecerán deformaciones plásticas hasta que se verifique:
(
) (
) (
)
[
2]
21 3 2 3 2 2 2 1
3
1
6
1
fE
E
σ
µ
σ
σ
σ
σ
σ
σ
µ
+
=
−
+
−
+
−
+
--- (2.34)
es decir
(
) (
) (
)
[
2]
21 3 2 3 2 2 2
1
σ
σ
σ
σ
σ
2
σ
fDe esta expresión se deduce la correspondiente a la tensión equivalente
(
) (
) (
[
)
2]
1 3 2 3 2 2 2 1 2
1
σ
σ
σ
σ
σ
σ
σ
equiv = − + − + − --- (2.36)Según se ve, la diferencia entre esta teoría y la expuesta de la energía de deformación estriba en que en aquélla todo el potencial interno está vinculado al comienzo dela acción anelástica, mientras que en la de la energía de distorsión el potencial interno que determina la aparición de deformación plástica es solamente la parte debida al cambio de forma.
En el caso de estados tensionales planos, la expresión del criterio de Von Mises se reduce a
--- (2.37)
(
)
22 1 2 2 2 2
1
σ
σ
σ
σ
σ
fσ
−
+
−
=
o bien
--- (2.38)
2 2 1 2 2 2
1
σ
σ
σ
σ
fσ
+ − =Esta ecuación representa una curva elíptica, figura 2.7. Por eso, si un punto del material se somete a esfuerzo de modo que las coordenadas del esfuerzo
(
σ
1,σ
2)
queden dentro del área sombreada o queden, en cambio, fuera de ésta, se dice que el material falla.
Fig.2.7.- Teoría de la energía de distorsión de Von Mises
del esfuerzo normal máximo, ya que podría predecir condiciones de seguridad que en realidad no existen. La teoría del esfuerzo normal máximo es mejor para materiales frágiles y puede dar resultados inciertos en materiales dúctiles [2.6].
Por lo general, en un diseño de elementos mecánicos se empleará la teoría del esfuerzo cortante máximo si las dimensiones no tienen que ser muy precisas, si es necesaria una rápida estimación del tamaño, o si se sabe que los factores de seguridad deben ser amplios. La teoría de la energía de distorsión predice con mayor precisión la falla y, por tanto, se utilizaría cuando el margen de seguridad hubiera de estar dentro de límites cercanos o cuando se investigue el origen de la falla real de un elemento mecánico[2.1].
2.3
DINÁMICA Y VIBRACIONES
Los sistemas de ingeniería que poseen masa y elasticidad están capacitados para tener movimiento relativo. Si el movimiento de estos sistemas se repite después de un determinado intervalo de tiempo, el movimiento se conoce como vibración. Por lo que podemos definir a las vibraciones como fluctuaciones de pequeña amplitud de un sistema estructural o mecánico sobre una posición de equilibrio; la vibración es, en general, una forma de energía disipada [2.7].
Las vibraciones son iniciadas cuando un elemento es desplazado de su posición de equilibrio debido a una energía impartida al sistema a través de una fuente externa
Todos los cuerpos presentan una señal de vibración en la cual plasman cada una de sus características
.
Si se designa por x(t) al desplazamiento de un sistema, en el instante t; un movimiento vibratorio viene caracterizado mediante la ecuación:
x
( ) (
t = xt+T)
--- (2.39)
2.3.1 Periodo
Generalmente se presenta una vibración mecánica cuando se separa un sistema de su posición de equilibrio estable. El sistema tiende a regresar a esa posición bajo la acción de fuerzas de recuperación (ya sean fuerzas elásticas como en el caso de una masa suspendida de un resorte, o fuerzas gravitacionales como en el caso de un péndulo). Pero generalmente el sistema llega a su posición original con cierta velocidad que ha adquirido, la cual hace que el sistema sobrepase dicha posición. Como el proceso puede repetirse indefinidamente, el sistema se mantiene en movimiento hacia uno y otro lado de su posición de equilibrio. El tiempo requerido para que el sistema efectué un ciclo completo de movimiento se llama el periodo de vibración [2.8].
En general si x(t) es una función periódica de periodo T, su desarrollo en series de Fourier es
( )
(
)
∑
∞ =+
+
=
+
+
+
+
+
+
=
1 0 2 1 2 1 0cos
2
...
2
...
2
cos
cos
2
n nn
n
t
b
senn
t
a
a
t
sen
b
t
sen
b
t
a
t
a
a
t
x
ω
ω
ω
ω
ω
ω
--- (2.40)
( )
( )
( )
( )
∫
∫
∫
∫
∫
∫
=
=
=
=
=
=
ω π ω πω
ω
π
ω
ω
ω
π
ω
π
2 0 0 2 0 0 0 0 02
cos
)
(
2
cos
)
(
T n T ntdt
senn
t
x
T
tdt
senn
t
x
b
tdt
n
t
x
T
tdt
n
t
x
a
dt
t
x
T
dt
t
x
a
--- (2.41)
Las funciones
t
senn
b
t
n
a
n nω
ω
cos
--- (2.42)
Se denominan armónicos de orden n de la función periódica x(t), siendo su periodo T/n.
2.3.2 Movimiento armónico simple
La forma mas simple de un movimiento periódico recibe el nombre de Movimiento Armónico, siendo la ecuación que describe el citado movimiento [2.9].
( )
t Asen tx =
ω
--- (2.43) Dondet representa el tiempo
A valor máximo de desplazamiento, se designa por amplitud
ω frecuencia circular o pulsación, se expresa en radianes por segundo.
Frecuencia (f): Es el numero de oscilaciones completas realizadas en la unidad de tiempo, es la inversa del periodo, T; es decir:
π
ω
2
1
=
=
T
f
--- (2.44)2.3.3 Frecuencia natural
Es la frecuencia de un sistema que tiene vibración libre sin fricción, mientras que frecuencia natural amortiguada es la frecuencia de un sistema que tiene vibración libre con fricción[2.7]..
2.3.4 Vibración libre
Vibración libre es el movimiento periódico que se observa cuando el sistema se desplaza de su posición de equilibrio estático. Las fuerzas que actúan son: la fuerza del resorte, la fuerza de fricción y el peso de la masa. Debido a la presencia de fricción, la fricción disminuirá con el tiempo. Esta es la vibración libre a veces llamada transitoria[2.7]..
2.3.5 Vibración forzada
Cuando están actuando fuerzas externas sobre el sistema durante su movimiento vibratorio, la vibración se denomina vibración forzada. En una vibración forzada el sistema tendera a vibrar en su propia frecuencia natural, así como también a seguir la frecuencia de la fuerza de excitación. En presencia de la fricción, aquella parte del movimiento que no se mantienen por la fuerza de excitación sinusoidal desaparecerá gradualmente. Como resultado, el sistema vibrara en la frecuencia de la fuerza de excitación, sin importar las condiciones iniciales ni la frecuencia natural del sistema. La parte de vibración que se mantiene se llama vibración de estado estacionario o respuesta del sistema. [2.7].
2.3.6 Amortiguamiento
indefinidamente y estará gobernada únicamente por la cantidad de amortiguamiento presente en el sistema. Las fallas de estructuras tales como edificios, puentes, turbinas y las alas del aeroplano se han asociado a la resonancia. Por tanto, la frecuencia natural del sistema debe conocerse y escogerse con cuidado, con el fin de evitar los efectos desastrosos producidos por una amplitud muy grande de vibración en resonancia[2.7].
2.3.8 Sistema de un solo grado de libertad
Muchos sistemas pueden vibrar en más de una manera y dirección. Si un sistema esta restringido de modo que solo puede vibrar de una manera, o si se necesita únicamente una coordenada independiente para determinar por completo la localización geométrica de las masas del sistema en el espacio, este es un sistema de un solo grado de
libertad[2.7].
2.4 FATIGA
Cuando las piezas se someten a cargas con variación en el tiempo o no estáticas el problema es completamente distinto a cargas sometidos a cargas estáticas.
Para obtener las propiedades de materiales relacionadas con el diagrama esfuerzo deformación, la carga se aplica en forma gradual dando suficiente tiempo para que se desarrolle la deformación. En las condiciones usuales la probeta se ensaya hasta que se destruye, de manera que los esfuerzos se aplican solo una vez. Estas condiciones se conocen como cargas estáticas y se tienen con lato grado de aproximación en muchas estructuras y elementos de maquina.
Sin embargo, ocurre frecuentemente que los esfuerzos varían o fluctúan entre determinados valores.
En muchos casos hay que analizar elementos de maquina que han fallado bajo la acción de esfuerzos repetidos o fluctuantes y, sin embargo, después de un cuidadoso análisis se descubre que los esfuerzos máximos reales fueron inferiores a la resistencia ultima del material, y muchas veces, aún menores que la resistencia de fluencia. La característica mas notable de estas fallas ha sido que los esfuerzos se repitieron muchas veces. Por lo tanto, la falla se denomina falla por fatiga[2.7]..
Como el área esforzada disminuye de tamaño, el esfuerzo aumenta en magnitud hasta que, finalmente, el área restante falla de repente. En consecuencia, las fallas por fatiga se caracterizan por dos áreas distintas. La primera se debe al desarrollo progresivo de la grieta, en tanto que la segunda se origina en la ruptura repentina.
Cuando las piezas de maquina fallan estáticamente, por lo general sufren una deformación muy grande debido a que el esfuerzo excedió a la resistencia de fluencia. Entonces debe reemplazarse antes de que ocurra la ruptura. Por tanto, muchas fallas estáticas son visibles y se detectan anticipadamente, pero una por fatiga no da señal alguna: es repentina y total y, por tanto peligrosa.
2.4.1 Diagrama S-N
Para determinar la resistencia de materiales bajo la acción de cargas de fatiga, las probetas se someten a fuerzas repetidas o variables de magnitud variable especificadas y, así, se cuentan los ciclos o alteraciones de esfuerzos que soporta el material hasta la falla o ruptura. El dispositivo para ensayos de fatiga mas usado es la maquina de viga rotatoria de alta velocidad de R.R. Moore. Los resultados de la prueba de fatiga se grafican obteniendo un diagrama S-N (figura 2.9). En el caso de metales férreos y sus aleaciones y sus aleaciones ésta se vuelve horizontal después de que el material ha sido esforzado durante un número de ciclos.
![Tabla 1.1.- Sistema de Transporte Colectivo Metro[1.2].](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/20.612.133.482.234.449/tabla-sistema-de-transporte-colectivo-metro.webp)

![Fig. 1.6.-Esquema de bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz[1.6]](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/29.612.86.529.61.364/esquema-bogie-guiado-mediante-placas-guarda-motores-suspendidos.webp)
![Fig. 1.7.-Bogie con guiado de las cajas de grasa mediante placas de guarda y motores suspendidos por la nariz[1.6]](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/30.612.93.502.321.564/bogie-guiado-cajas-mediante-placas-guarda-motores-suspendidos.webp)
![Figura 3.3.- Ejemplos de estructuras superficiales[3.1].](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/63.612.139.478.175.651/figura-ejemplos-de-estructuras-superficiales.webp)

![Fig. 4.1 .- Elemento SOLID45. [4.4]](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/71.612.162.425.375.578/fig-elemento-solid.webp)
![Fig. 4.3 .- Elemento SOLID164. [4.4]](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/73.612.227.378.407.499/fig-elemento-solid.webp)
![Fig. 4.5 .- Elemento BEAM4. [4.4]](https://thumb-us.123doks.com/thumbv2/123dok_es/4929917.73716/74.612.165.435.210.510/fig-elemento-beam.webp)
