INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA
“PROCESAMIENTO DIGITAL DE IMÁGENES DE
ULTRASONIDO”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRONICA
PRESENTA:
RODRIGO HERNÁNDEZ NAVARRETE
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA
yELECT.RICA
UNIDAD PROFESIONAL "ADOLFO LOPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN COMUNICACIONES Y ELECTRÓNICA POR LA OPCION DE TITULACION
TESIS Y EXAMEN ORAL
DEBERA(N) DESARROLLAR C. RODRIGO HERNANDEZ NAVARRETE
"PROCESAMIENTO DIGITAL DE IMÁGENES DE ULTRASONIDO"
PROCESAR IMÁGENES DE ULTRASONIDOS, PARA OBTENER RASGOS MAS DEFINIDOS DE LA IMAGEN Y HACER UN DIAGNOSTICO MAS EFICAZ.
MÉXICO D.F. A 25 DE OCTUBRE DE 20/0.
A .
ASEsaRESINDICE
TEMA PAGINA
OBJETIVO GENERAL 7
OBJETIVOS ESPECÍFICOS 7
JUSTIFICACION 8
CAPÍTULO I. RUIDO EN IMÁGENES DIGITALES
1.1 Introducción 9
1.2 Tipos de ruido 10
1.2.1 Ruido Gaussiano 10
1.2.2 Ruido Impulsivo 11
1.2.3 Ruido sal y pimienta 12
1.2.4 Ruido uniforme 12
1.2.4.1 Ruido uniforme frecuencial 12
1.2.4.2 Ruido uniforme cursivo o multiplicativo 13
1.2.5 Ruido Speckle 13
1.3 Eliminación o disminución del ruido 14
1.4 Tipos de filtro 14
1.4.1 Filtros lineales 15
1.4.2 Filtro de la media 17
1.4.3 Filtro gaussiano 18
1.4.4 Filtros no lineales, filtros de mediana 18
1.4.5 Filtro adaptativo 18
1.4.6 Filtros digitales 19
CAPÍTULO II. MANEJO Y PROCESAMIENTO DE IMÁGENES
2.1 Introducción 20
2.2 Image Processing Toolbox 22
2.2.1 Tipos de datos de en una imagen 23
2.3 Tipos de imágenes 24
2.3.1 Imagen binaria 24
2.3.2 Imagen indexada 24
2.3.3 Imagen de intensidad 24
2.3.4 Imagen multitrama 25
2.3.5 Imagen RGB 25
2.4 Lectura y escritura de imágenes a través de
archivo 25
2.4.1 Leyendo imágenes de disco 27
2.5 Extracción de bordes 29
2.5.1 Método de Prewitt 30
2.5.2 Método de Roberts 30
2.5.3 Método de filtro Laplaciano 30
2.5.4 Método Laplaciano de la Gaussiana (log) 30
2.5.5 Método Canny 30
2.5.6 Método Sobel 31
2.6 Imágenes binarias y segmentación por umbral
31
CAPÍTULO III. WAVELETS
3.1 Introducción 33
3.2 Wavelets 34
3.3.1 Análisis de Fourier 35
3.3.2 Análisis de Wavelets 36
3.4 Bases wavelets 38
3.5 Algoritmo de la transformada wavelet
piramidal 38
3.5.1 Transformada Wavelet Piramidal. Algoritmo 38
3.5.2 Funciones de Daubechies 40
3.5.3 Número de operaciones 40
3.6 Transformada wavelet bidimensional 40
3.7 La transformada wavelet continua (CWT) 42
3.8 La transformada wavelet discreta (DWT) 43
3.9 Wavelets y ruido 44
3.10 Wavelets en Matlab 45
CAPÍTULO IV. IMÁGENES MEDICAS, ULTRASONIDO
4.1 Introducción 47
4.2 Usos comunes del ultrasonido 49
4.3 Como funciona 50
4.3.1 Ecos de ultrasonido 51
4.3.2 Ecuación de la onda 51
4.3.3 Dispersión en el tejido 52
4.3.4 El equipo de ultrasonido 53
4.3.5 Efectos biofísicos de los ultrasonidos 53
4.3.5.1 Efecto mecánico 53
4.3.5.2 Efecto térmico 53
4.4 Ruido en ultrasonido 55
4.4.1 Naturaleza del ruido 55
4.4.1.1 Fenómeno de absorción 55
4.4.1.2 Fenómeno de reflexión 56
4.4.1.3 Fenómeno de difusión 56
4.5 Speckle 56
CAPITULO V. RESULTADOS
5.1 Introducción 58
5.1.1 Visión de bajo nivel 59
5.1.2 Visión de alto nivel 59
5.2 Visión de bajo nivel y alto nivel 59
5.2.1 Adquisición de imágenes 60
5.2.2 Guardando la imagen 60
5.2.3 Preprocesamiento 61
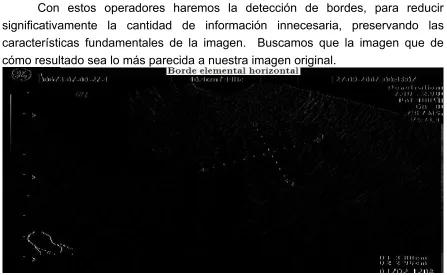
5.2.3.1 Operador elemental horizontal 63
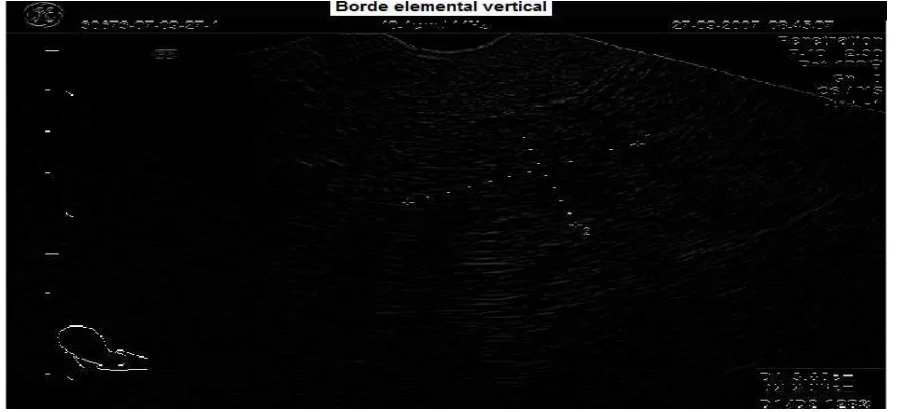
5.2.3.2 Operador elemental vertical 64
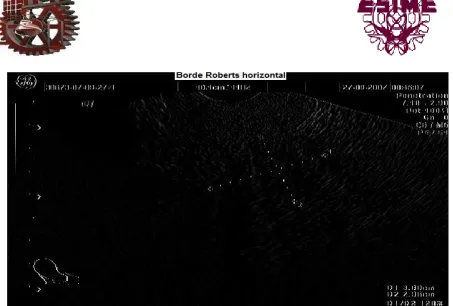
5.2.3.3 Operador de Roberts horizontal 64
5.2.3.4 Operador de Roberts vertical 65
5.2.3.5 Operador de Prewitt horizontal 66
5.2.3.6 Operador de Prewitt vertical 66
5.2.3.7 Operador de Sobel horizontal 67
5.2.3.8 Operador de Sobel vertical 68
5.2.3.9 Filtro Gaussiano 68
5.2.3.10 Filtro Laplaciano 69
5.2.3.11 Filtro Log 70
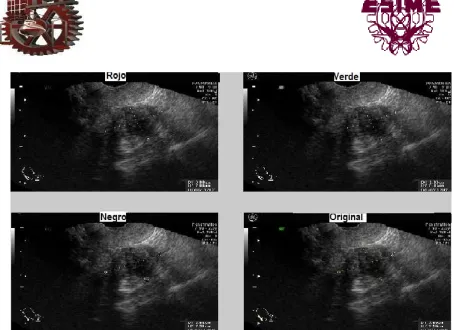
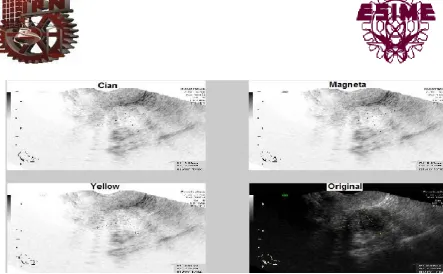
5.2.3.12 Transformación al modelo RGB (Red,
5.2.3.12 Transformación al modelo CMY (Cian,
Magneta, Yellow) 71
5.2.4 Segmentación 72
5.3 Visión de alto nivel 73
5.3.1 Representación 73
5.3.1.1 Aplicación de filtros 74
5.3.2 Aplicación de Wavelets 76
5.3.2.1 Daubechies 76
5.3.2.2 Haar 79
5.3.2.3 Coiflets 80
5.3.2.4 Aproximación lineal y no-lineal 81
CONCLUSIONES 83
RECOMENDACIONES PARA TRABAJOS FUTUROS 83
BIBLIOGRAFÍA 84
APÉNDICE A 89
APÉNDICE B 96
OBJETIVO GENERAL
• Utilizar técnicas de realce y nitidez, en busca de la mejora visual de las
imágenes de ultrasonido.
• Efectuar realces temporales y permanentes de las imágenes de ultrasonido.
• Obtener datos, que hagan más evidentes los rasgos de las imágenes de
ultrasonidos.
OBJETIVOS ESPECÍFICOS
• Presentar las técnicas, herramientas analíticas y algorítmicas del
procesamiento de imágenes para análisis clínicos.
• Aplicar las técnicas a imágenes reales.
• Extraer y definir características importantes de ultrasonidos, con el fin de
ayudar al diagnostico oportuno y en tiempo real de un paciente.
• Obtener como resultado final, una imagen que permita tomar una decisión
JUSTIFICACIÓN
El procesamiento de imágenes en la actualidad es utilizado en distintas áreas como son: la astronomía, la geología, física, biológicos, hasta el inesperado uso en las ciencias humanas, por ejemplo, la arqueología o historia del arte. Y sin duda en el campo de la medicina donde se obtienen múltiples beneficios que se centran en la salud y el bienestar humano.
El procesamiento digital de imágenes, incluye un conjunto de técnicas que operan sobre la representación digital de una imagen, o un objeto para destacar algunos de los elementos que conforman dicha escena, de modo que se facilite su análisis posterior. En general, las técnicas de procesamiento de imágenes son aplicadas cuando resulta necesario realzar o modificar una imagen y mejorar su apariencia. Destacando algún aspecto de la información contenida en la misma. En general utilizamos estas técnicas cuando se requiere, medir, contrastar o clasificar algún elemento contenido en la misma.
Las imágenes digitales representan información visual asociada con una escena ambiental real que correspondería a lo que obtenemos con el sentido de la vista, cierto tipo de información puede que no sea tan evidente como resultado a la utilización de sensores que no son apropiados.
CAPÍTULO I: RUIDO EN IMÁGENES DIGITALES
En este capítulo se definirá que es el ruido, orígenes y las repercusiones que pueden presentarse al encontrarlo en una imagen digital, sabemos que el ruido afectará la correcta reproducción de las imágenes, con las que se va a trabajar. Posteriormente trataremos de algunas de las técnicas existentes para el tratamiento de reducción o eliminación de éste para después continuar con el procesamiento digital de las imágenes.
1.1 INTRODUCCIÓN
El ruido en una imagen es un fenómeno muy frecuente, aparece de improvisto y por varias circunstancias; en el caso específico de las imágenes digitales lo definimos como los píxeles “erróneos”, aleatorios que se entremezclan entre los píxeles “aceptables” que componen la imagen y que lo único que hacen es entorpecer su correcta reproducción.
Uno de los ruidos más comunes en imágenes de formato digital es el conocido como ruido digital o píxeles rojos que no es más que la aparición de pequeños granos rojos muy intensos que se forman en el fondo de la imagen. Los factores que contribuyen a que este ruido se produzca es el tamaño del sensor, pero más frecuentemente se debe a la selección de un ISO (Organización Internacional para la Estandarización - International Organization for Standardization) muy alto, el ISO es la sensibilidad de la cámara o dispositivo digital. [1]
o puede ser generado dentro de los componentes eléctricos de la entrada del amplificador (ruido interno), o puede ser añadido a la señal a medida que viaja por los cables a la entrada del amplificador (ruido externo), o simplemente como la consecuencia del proceso de captura, digitalización y transmisión.
Si este ruido aparece en la imagen de un ultrasonido, tendríamos un grave problema, dado que consideramos al ultrasonido como un oportuno diagnóstico para el bien de la salud de un paciente. Y esto porque el ultrasonido es una herramienta en tiempo real, portátil y bajo costo, un ultrasonido con ruido puede traer múltiples consecuencias como son: una incorrecta interpretación por gente especializada, y una mala detección en detalles, ya que generalmente lo hace una computadora.
Si el ruido ya está presente en nuestro ultrasonido lo que nos queda ahora por hacer, es un correcto manejo de este para tratar que sus consecuencias no repercutan gravemente en la interpretación de la imagen, en este proyecto se planea implementar el uso de filtros con la finalidad de hacer una reducción del ruido presente, dado que sabemos que un filtrado de datos reduce el ruido en la adquisición de estas, por ello en la siguiente sección abordaremos el tema del ruido. [2]
1.2 TIPOS DE RUIDO
Todos los procesos de captura de imagen están sujetos a ruido de algún tipo, por lo que sería un problema ignorarlo, por ello consideramos importante hablar de los diferentes tipos de ruido en esta sección, para después hablar de las técnicas para identificarlos y eliminarlos de nuestras imágenes.
1.2.1 Ruido Gaussiano
Fig 1.1. a) Imagen original b) Imagen con ruido Gaussiano.
La varianza es la estimación de la relación de la señal a ruido de una imagen. La influencia del ruido gaussiano según la varianza, la podemos ver en la figura 1.2
Fig. 1.2 a) Imagen original b) Varianza de s=0.025 c) Varianza de s= 0.05.
1.2.2 Ruido Impulsivo
El ruido Impulsivo es el que aparece dejando en la imagen, pixeles completamente blancos, en un orden aleatorio como se ve en la figura 1.3. [1]
1.2.3 Ruido Sal y Pimienta
El ruido sal y pimienta aparece en las imágenes, tomando valores muy altos o muy bajos, esto en la imagen se representa como pixeles aleatorios de colores completamente blancos o completamente negros. Por tal motivo se le ha dado el nombre ruido sal y pimienta, dejando los valores como valor máximo (sal) o valor mínimo (pimienta), como se observa en la figura 1.4. [1]
Fig. 1.4 a) Imagen original b) Imagen con ruido sal y pimienta.
1.2.4 Ruido Uniforme
Es el ruido que aparece en las imágenes mostrando una distribución uniforme, La probabilidad de tomar cualquier valor de gris dentro de un intervalo definido es constante. Aunque se puede distinguir en dos categorías como son:
1.2.4.1 Ruido Uniforme Frecuencial
La imagen obtenida es la real más una interferencia de señal periódica, (senoide, cosenoide...) figura 1.5. [1]
1.2.4.2 Ruido Uniforme Cursivo o Multiplicativo
La señal obtenida es fruto de la multiplicación de dos señales, la imagen original con una señal de ruido, vea la figura 1.6.
Fig. 1.6 a) Imagen original b) Imagen con ruido multiplicativo
Para este caso podemos observar el grado del ruido, cuando este es recibido con diferentes varianzas, por ejemplo el caso de la figura 1.7. [1]
Fig. 1.7 a) Imagen original, b) Imagen con ruido multiplicativo de s=0,005 c) Imagen con ruido multiplicativo de s=0,025.
1.2.5 Ruido Speckle
Es un patrón granular presente en las imágenes de ultrasonido. Considerado como un tipo de ruido multiplicativo a la señal.
1.3 ELIMINACIÓN O DISMINUSIÓN DEL RUIDO
Como ya se dijo la cantidad de ruido se mide gracias a una medida llamada varianza del ruido, aunque es más interesante medirla con relación a la energía de la señal o la imagen. La varianza se caracteriza en el cálculo, de las muestras de la potencia de ruido que afecta al sistema, que también se combina con los errores de amplitud y de incremento en la fase obtenidos por el receptor de la imagen [2]. La disminución de esta varianza en la imagen dará como beneficio la detección y clasificación de blancos por medio de métodos computacionales eficientes.
El método computacional que elegimos para el tratamiento de las imágenes es Matlab, dicho programa cuenta con una serie de procesos para eliminar o reducir el ruido en una imagen. Esta reducción o eliminación se lleva a cabo gracias a la utilización de filtros, adaptados a diferentes ruidos.
1.4 TIPOS DE FILTROS
1.4.1 Filtros lineales
Este tipo de filtros realiza una operación de convolución, entre la imagen a ser filtrada y una máscara a quitar. Entonces es necesario definir una matriz que contendrá los coeficientes del filtro, lo que a su vez define los píxeles del entorno que serán utilizados como argumento del filtro lineal que alterará el valor del píxel. A esta matriz se le denomina máscara y tiene una dimensión [m, n].
Esto lo podemos definir de la siguiente manera: Dada una imagen G que es la suma de I y un ruido n, (G=I+n), atenuar n lo más posible (eliminarlo, si es posible) sin alterar I significativamente. El filtrado lineal, trabajara en la imagen G de tamaño MxN, observada la versión filtrada lineal de G, será la estimación de Ie
dada por
I
e(i,j)=
A(h,k)G(i-h,j-k)
donde “A” es el núcleo de la convolución.
Uno de los principales inconvenientes que muestra este proceso es el enturbiamiento que este filtro produce en nuestra imagen, así que este provoca un difuminado en los bordes, por lo que tienen que ser utilizados con cierta precaución. [3]
1.4.2 Filtro de la media
El funcionamiento básicamente consiste: en asignar al pixel central la media de todos los pixeles incluidos en la ventana, así que se efectúa el promedio de los valores del entorno. Este reemplaza el valor de un píxel por la media de los valores del punto y sus vecinos. Su efecto es el difuminado o suavizado de la imagen y se aplica junto con el de mediana para eliminar ruidos. Por ejemplo este filtro lo implementamos con la siguiente máscara para un tamaño 3x3:
Fig. 1.8. Máscara para un tamaño de 3x3.
Normalmente el tamaño de la máscara se toma en función de la cantidad de suavizado que queramos aplicar en cada momento. La visualización del resultado es el único medio de saber si hemos elegido el tamaño adecuado.
Se puede observar que el efecto final del filtro de la media es un suavizado de la imagen por reducción o redistribución del valor de los píxeles. Este filtro tiene el resultado opuesto a los de detección de bordes, donde el objetivo de los filtros es acentuar las diferencias, por esta razón el filtro de la media es un filtro paso bajo. También hay que notar que este filtro no modifica la imagen en las zonas donde el valor de los píxeles es el mismo, en oposición a los detectores de bordes que ponen estas regiones a cero.
En resumen, la media, como el resto de los filtros de suavizado, suaviza los contornos y otros detalles de forma que los objetos aparezcan menos definidos.
En Matlab la función que nos permite realizar el filtro de la media es:
imfilter.
B = imfilter(A,H,option1,option2,...)
Tabla 1.1. Diferentes filtros creados para H.
VALOR DESCRIPCIÓN
‘average’ Filtro promedio
‘disk’ Filtro de media circular
‘gaussian’ Filtro Gaussiano pasa bajos
‘laplacian’ Operador Laplaciano de aproximación a dos dimensiones
'log' Filtro Laplaciano de Gauss
´motion´ Movimiento lineal como el de una cámara
'prewitt' Prewitt horizontal, filtro que realza el borde
'sobel' Sobel horizontal, filtro que realza el borde
'unsharp' Filtro unsharp, aumento al contraste
La función de Matlab que permite generar el filtro H es fspecial. Esta función crea filtros bidimensionales del tipo especificado por type.
h = fspecial(type,parameters)
El valor de type puede ser seleccionado de los valores mostrados en la tabla 1.1. [4]
1.4.3 Filtro Gaussiano
1.4.4 Filtros no lineales, filtros de mediana
Este tipo de filtro también crea nuevos pixeles en una nueva imagen, estos pixeles se generan calculando la mediana del conjunto de píxeles del entorno, gracias a los pixeles vecinos que corresponden a la imagen origen. De esta forma se homogeneízan los píxeles de intensidad muy diferente con respecto a la de los vecinos.
Este filtro es utilizado con mucha frecuencia en imágenes que contienen ruido aleatorio. El filtro de mediana en Matlab se puede implementar con la función medfilt2, esto es:
B = medfilt2(A) --- (1)
donde A es la matriz de entrada a la que se le aplica el filtro de la mediana utilizando por default una vecindad de 3X3. [3]
1.4.5 Filtrado adaptativo
Este filtro utiliza una función llamada wiener2, que aplica un filtro lineal a una imagen adaptable, cuando mencionamos que es un filtro adaptativo o adaptable hablamos de la capacidad de manejar valores de imagen utilizando un valor local (varianza). Cuando la diferencia es grande, wiener2 realiza un filtrado de suavizado. Y cuando la diferencia es pequeña, wiener2 realiza un filtrado aun más suavizado que el anterior.
La utilización de este filtro a menudo produce mejores resultados que los que arroja un filtrado lineal, esto se debe a que el filtro adaptativo es más selectivo que el filtro lineal, la preservación de los bordes y otras partes de alta frecuencia de una imagen.
La función wiener2 se encarga de todos los cálculos preliminares y aplica el filtro a una imagen de entrada, pero esta función requiere más tiempo de cálculo de filtrado lineal.
1.4.6 Filtros digitales
Son usados principalmente para eliminar altas o bajas frecuencias de la imagen, es decir, para suavizarla o bien, para realzar o detectar los bordes de la imagen. Esta imagen se puede filtrar en el dominio del espacio, trabajando directamente sobre los píxeles de la imagen, o en el dominio de la frecuencia,
donde las operaciones se llevan a cabo a través de la transformada de Fourier de la imagen.
1.4.7 Filtros estadísticos ordenados
Funcionan ordenando los valores en la vecindad de cada punto de menor a mayor, y obteniendo algún valor a partir de la lista ordenada, por ejemplo:
• Mínimo: selecciona el valor más pequeño.
• Máximo: selecciona el valor más alto.
• Mediana: selecciona el valor en la posición intermedia.
CAPÍTULO II: MANEJO Y PROCESAMIENTO DE IMÁGENES
DIGITALES
En este capítulo, se revisará la forma en la cual se hace el manejo y procesamiento de las imágenes digitales y como utilizaremos estos beneficios, para hacer el “Procesamiento de Imágenes en ultrasonidos”, con el objetivo de obtener información útil, para su utilización posterior.
2.1 INTRODUCCIÓN
Al mencionar la palabra “Procesamiento Digital de Imágenes”, hacemos referencia a la manipulación de imágenes, con un aspecto digital, con la intención de mejorar o modificarlas, así como la extracción de información útil a partir de ellas. Este manejo también nos ofrece ventajas como son: fáciles de almacenar, de preservar, de duplicar o de copiar, pueden incluirse de forma sencilla en informes o presentaciones y pueden trasmitirse por líneas de transferencia de datos.
En la figura 2.1 se muestra un ejemplo de una imagen digital.
Fig. 2.1 a) Imagen con valores 0 y 1, b) Imagen bitonal.
Podemos entonces definir una imagen, como una función bidimensional de intensidad de luz, dada por f(x, y), donde “x” y “y” denotan las coordenadas espaciales y el valor de f en cualquier punto.
Este tipo de imágenes son conocidas como imágenes a escala de grises ya que las imágenes RGB, están representadas por un arreglo de datos de mXnX3,
donde 3 define el componente: rojo, verde o azul de cada píxel, la combinación de los componentes definen el color representado en el píxel correspondiente. [5]
En Matlab podemos trabajar con distintos tipos de archivos, mostrados en la tabla 2.1
Tabla 2.1. Tipo de archivos para trabajar en Matlab.
FORMATO EXTENSION
TIFF .tiff
JPEG .jpg
GIF .gif
BMP .bmp
PNG .png
2.2 IMAGE PROCESSING TOOLBOX
El Toolbox proporciona a Matlab un conjunto de funciones que amplía las capacidades de desarrollo de aplicaciones y de nuevos algoritmos en el campo del proceso y análisis de imágenes. El entorno matemático y de creación de Matlab es ideal para el procesado de imágenes, ya que estas imágenes son, al fin y al cabo, matrices. Este toolbox incorpora funciones para:
• Diseño de filtros.
• Mejora y retocado de imágenes.
• Análisis y estadística de imágenes.
• Operaciones morfológicas, geométricas y de color.
• Transformaciones 2D.
El proceso de imágenes es un campo de trabajo absolutamente crucial para él diagnóstico en campos de Médicina, Astronomía, Geofísica, Ciencias medioambientales, Análisis de datos en laboratorios, Inspección industrial, etc. Los programas actuales de procesado y análisis de imágenes se clasifican actualmente en dos categorías:
• Librerías de bajo nivel para programadores profesionales.
• Paquetes de aplicación, con capacidades limitadas de personalización.
Ambos tipos de aplicaciones están, generalmente, pensados para tareas básicas de visualización de datos. Sin embargo, muchos de ellos adolecen de la posibilidad de efectuar análisis numéricos de los mismos. [6]
2.2.1 Tipos de datos en una imagen
Los elementos unit8 constituyen una imagen en Matlab tienen el formato entero, que es un tipo de dato que puede variar de 0 a 255, sin poder soportar decimales y valores que salgan fuera de ese rango. Lo anterior resulta una desventaja principalmente en aquellos casos donde se implementan algoritmos que trabajan con este tipo de datos para realizar operaciones de división o multiplicación por tipo de dato flotante, en estos casos es necesario trasformar la imagen de tipo de dato uint8 a double. Es importante tener en cuenta que si se utiliza la función imshow para desplegar las imágenes; esta no tiene la capacidad de poder desplegar imágenes del tipo double por lo que una vez realizado las operaciones de punto flotante es necesario después convertir al tipo de dato uint8.
[8]
Los tipos de datos de una imagen, con los que podemos trabajar se muestran en la tabla 2.2
Tabla 2.2 Tipo de datos.
TIPO DESCRIPCIÓN
double Doble precisión, números en punto flotante que varían en un rango
aproximado de -10308 a 10 308 (8 bytes por elementos)
uint8 Enteros de 8 bits en el rango de [0, 255] (1 byte por elemento) uint16 Enteros de 16 bits en el rango de [0,65535] (2 byte por elemento)
uint32 Enteros de 32 bits en el rango de [0, 4294967295] (4 bytes por elemento)
int8 Enteros de 8 bits en el rango de [-128, 127] (1 byte por elemento)
int16 Enteros de 16 bits en el rango de [-32768, 32767] (2 bytes por elemento)
int32 Enteros de 32 bits en el rango de [-2147483648, 2147483647]
single Número de punto flotante de precisión simple, con valores aproximadamente en el rango de -1038 a 1038 (4 bytes por elemento)
char Carácter (2 bytes por elemento)
2.3 TIPOS DE IMÁGENES
Es la relación definida entre los valores de un array y los colores de los píxeles. El toolbox soporta imágenes binarias, indexadas, de intensidad y RGB.
2.3.1 Imagen binaria (Binary image)
Imagen que contiene sólo píxeles de color blanco y negro. En Matlab, una imagen binaria es representada por una matriz de tipo uint8 o double logical que contiene 0’s y 1’s (los cuales representan blanco y negro respectivamente). Una matriz es logical cuando sus flags lógicas, están habilitadas. De forma habitual se nombra a la variable que contiene una imagen binaria como BW.
2.3.2 Imagen indexada (Indexed image)
Imagen cuyos píxeles tienen valores que son índices directos a un mapa de color RGB. En Matlab, una imagen indexada es representada por un array de clase uint8, uint16, o double. El mapa de color es siempre un arreglo mx3 de clase double. De forma habitual se nombra a la variable que contiene una imagen indexada como X.
2.3.3 Imagen de intensidad (Intensity image)
2.3.4 Imagen multiframe (Multiframe image)
Un archivo que contiene más de una imagen o frames. Una vez guardado en una variable, la imagen multiframe es un arreglo de 4 dimensiones, donde la cuarta dimensión especifica el número del frame. Este término es sinónimo de imagen multipágina (multipage image).
2.3.5 Imagen RGB (RGB image)
Una imagen cuyos píxeles son especificados por 3 valores, uno para cada componente de color (rojo, verde y azul) de cada píxel. En Matlab, una imagen RGB es representada por un arreglo mxnx3 de clase uint8, uint16, o double. De forma habitual se nombra a la variable que contiene una imagen RGB como RGB.
2.4 LECTURA Y ESCRITURA DE IMÁGENES A TRAVÉS DE ARCHIVO
Para leer imágenes contenidas en un archivo al ambiente de Matlab se utiliza la función imread, cuya sintaxis es:
imread(’nombre del archivo’) --- (1)
donde nombre del archivo es una cadena de caracteres conteniendo el nombre completo de la imagen con su respectiva extensión, los formatos de imágenes que soporta Matlab son los mostrados en la tabla 2.1.
Para introducir una imagen guardada en un archivo con alguno de los formatos especificados solo tiene que usarse la función imread y asignar su resultado a una variable que representará a la imagen, entonces se tendría que escribir en línea de comandos:
Entonces la imagen contenida en el archivo data.jpg quedará contenida en la variable imagen. Una vez que la imagen está contenida en una variable de Matlab es posible utilizar las funciones para procesar la imagen. Por ejemplo, una función que permite encontrar el tamaño de la imagen es:
[m, n]=size(image)--- (3)
en donde m y n contendrán los valores de las dimensiones de la imagen.
Para grabar el contenido de una imagen en un archivo se utiliza la función
imwrite.
imwrite(variable,’nombre del archivo’) --- (4)
en donde variable representa la variable que contiene a la imagen y nombre del archivo el nombre del archivo con su respectiva extensión de acuerdo a la tabla 2.1
Suponiendo que la variable imagen2 contiene la imagen que nos interesa grabar en el archivo dato2.jpg tendríamos que escribir:
imwrite(imagen2, ’data2.jpg’) --- (5)
Después que realizamos un procesamiento con la imagen, es necesario desplegar el resultado obtenido, la función imshow(variable) permite desplegar la imagen en una ventana en el ambiente de trabajo de Matlab.[8]
imshow(imagen2); --- (6)
2.4.1 Leyendo imágenes de disco
Para leer la imagen que vamos a procesar, empleamos el comando imread,
pero solo hemos explicado el proceso de leer imágenes contenidas en la pc, para leer imágenes contenidas en una unidad externa solo bastaría con especificar la ruta exacta de la imagen, por ejemplo suponemos que la imagen es: 'imagen1.jpg', y la tenemos en una unidad externa, entonces tendríamos que escribir:
f = imread('D:\imagenes\imagen1.jpg') --- (7)
Lo que se realiza a continuaciones es crear una matriz f, de una imagen en blanco y negro, cada elemento tendrá un valor de 0 ó 1, como se muestra en la siguiente tabla 2.3
Tabla 2.3. Muestra los valores del arreglo f, que representa la imagen.
f( 1,1 ) f(1,2 ) … f( 1,N) f= f( 2,1 ) f(2,2 ) … f(2,N)
f(M,1 ) f(M,2) … f(M,N)
Cabe mencionar, que en la línea de comando podemos escribir lo siguiente:
imshow(f,G) --- (8)
donde f es la imagen a mostrar y G es el número de niveles de intensidad a mostrar. Si G se omite, se usa 256. La sintáxis es la siguiente:
El resultado se puede observar en la figura 2.2
Fig. 2.2 a) Imagen con el comando imshow(f), b) Imagen con comando imshow f [low high]
Una utilidad interesante de imshow es:
imshow(f,[ ]) --- (10)
El comando expande el rango dinámico de la imagen, rango de diferencia de tono entre la parte más clara y la más oscura de una imagen, pone como límite inferior, el valor mínimo de intensidad de la imagen y como límite superior su valor máximo, que se muestra en la figura 2.3
Fig. 2.3 a) Imagen con el comando imshow(f), b) Imagen con el comando inshow f [ ]
También se puede medir la distancia euclídea entre dos puntos, en matemáticas la distancia euclidiana o euclídea es la distancia "ordinaria" entre dos puntos de un espacio euclideo espacio matemático n-dimensional usual, Matlab usualmente cuando dibuja una nueva figura, sobreescribe la ventana de la figura anteriormente mostrada [9]. Para mostrar la segunda figura en una ventana independiente, ejecutar lo siguiente:
figure, imshow(f) ---(11)
Para obtener información más detallada de una imagen almacenada en disco, podemos utilizar el comando imfinfo, escribiendo en la línea de comando:
imfinfo nombre_fichero --- (12)
2.5 EXTRACCIÓN DE BORDES
En visión computacional es de utilidad para hacer reconocimiento de objetos o bien para segmentar regiones, extraer los bordes de objetos (que en teoría delimitan sus tamaños y regiones).
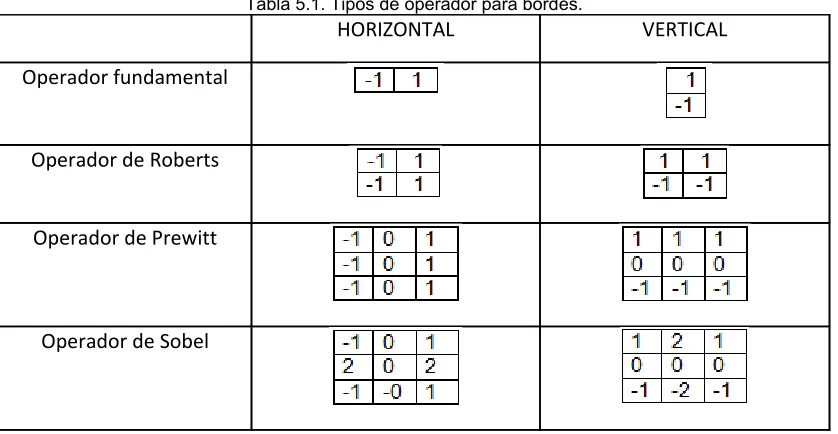
Los bordes de una imagen digital se pueden definir como transiciones entre dos regiones de niveles de gris significativamente distintos. Estos suministran una valiosa información sobre las fronteras de los objetos y puede ser utilizada para segmentar la imagen, reconocer objetos, etc. La mayoría de las técnicas para detectar bordes emplean operadores locales basados en distintas aproximaciones discretas de la primera y segunda derivada de los niveles de grises de la imagen.
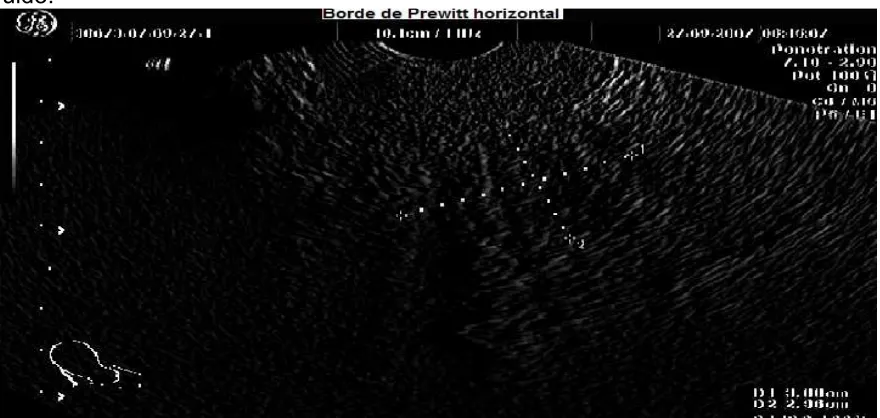
2.5.1 Método de Prewitt
Enfatiza los bordes horizontales y verticales como resultado de aplicar el gradiente para obtener las matrices que constituirán las máscaras.
2.5.2 Método de Roberts
Es uno de los más antiguos, simples y menos utilizado de los métodos de detección de bordes en la actualidad, a pesar de que su sencillez en la implementación es atrayente para las aplicaciones hardware de alta velocidad.
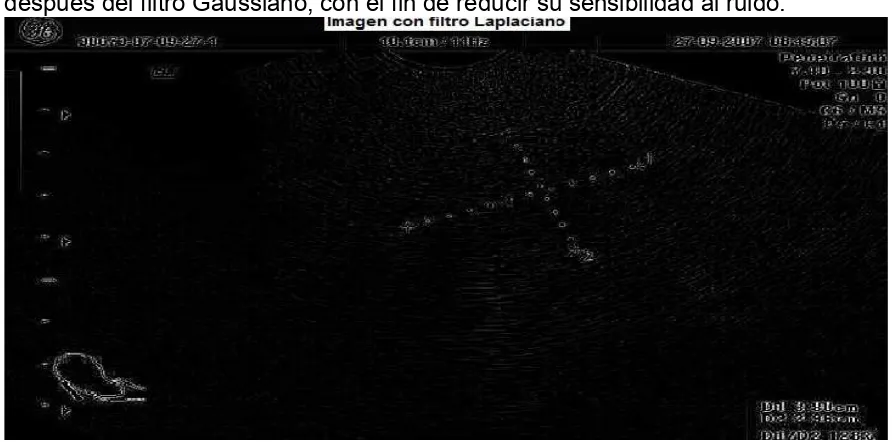
2.5.3 Método de filtro Laplaciano
Mejora la nitidez de la imagen por su capacidad de captar altas discontinuidades como resultado de la segunda derivada. Adicionalmente, detectar un borde es detectar el cruce por cero de la segunda derivada de la imagen.
2.5.4 Método Laplaciano de la Gausiana (log)
Es el resultado de aplicar la segunda derivada (el laplaciano, con respecto a s2 + t2 ) a una función gausiana (de ahí su nombre laplaciana de la gausiana). La detección de los bordes cuando se aplica la segunda derivada se basa en detectar los cruces por cero después de filtrar la imagen.
2.5.5 Método Canny
Consiste en tres grandes pasos:
• Obtención del gradiente: en este paso se calcula la magnitud y orientación del vector gradiente en cada píxel.
• Histéresis de umbral: en este paso se aplica una función de histéresis basada en dos umbrales; con este proceso se pretende reducir la posibilidad de aparición de contornos falsos.
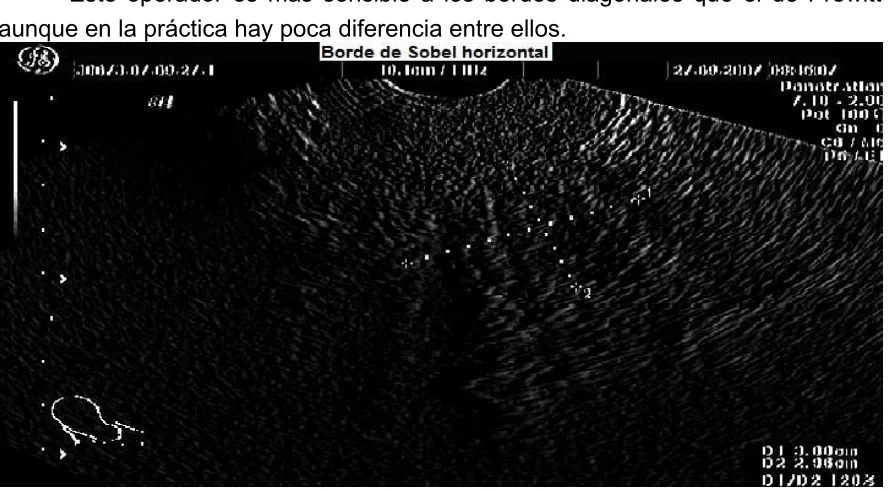
2.5.6 Método Sobel
Operador que realiza una medición 2-D gradiente espacial en una imagen y así se hace hincapié en las regiones de alta frecuencia espacial que se corresponden con los bordes. Normalmente se utiliza para encontrar la aproximación de la magnitud absoluta de gradiente en cada punto de entrada de una imagen en escala de grises. [10]
Para observar los resultados de los métodos, sugerimos pasar a la sección apéndice B, donde mostramos los resultados de estos métodos en la Fig 2.4.
2.6 IMÁGENES BINARIAS Y SEGMENTACIÓN POR UMBRAL
Recordemos que una imagen binaria es una imagen en la cual cada píxel puede tener solo uno, de dos valores posible. Como es lógico una imagen en esas condiciones es mucho más fácil encontrar y de distinguir sus características estructurales. [9]
En visión computacional el trabajo con imágenes binarias es muy importante ya sea para realizar segmentación por intensidad de la imagen, para generar algoritmos de reconstrucción o reconocer estructuras. La forma más común de generar imágenes binarias es mediante la utilización del valor umbral de una imagen a escala de grises; es decir se elige un valor limite (o bien un intervalo) a partir del cual todos los valores de intensidades mayores serán codificados como 1 mientras que los que estén por debajo serán codificados a cero.
Los resultados se muestran en la figura 2.5, para verificar el código, pasar al apéndice B de la Fig. 2.5.
Fig. 2.5 a) Imagen original, b) Resultado de un umbral de 50
En este capítulo se reviso la manera de emplear los primeros cambios en con el objetivo de realizar el procesamiento digital a una imagen, aunque cabe mencionar que existen diversas técnicas para llevar a cabo este procesamiento, y que dependen enteramente del programador o de los detalles que consideremos cambiar en la imagen.
CAPÍTULO III: WAVELETS
En este capítulo, demostraremos el porqué las wavelets se han convertido, en una de las principales herramientas de procesamiento de imágenes, que goza de gran popularidad en varias áreas como son las Ciencias y la Medicina, estas ayudan a los cálculos que se necesitan realizar, para el tratamiento de las imágenes.
3.1 INTRODUCCIÓN
Las wavelets proporcionan un conjunto de herramientas flexible para problemas prácticos, en las ciencias y la ingeniería, su crecimiento se ha observado en la última década, al aplicar estas wavelets en el análisis de señales, obteniendo resultados exitosos.
Una ventaja de la utilización de las wavelets es que permiten modelar mejor los procesos que dependen fuertemente del tiempo, ya que generalmente su comportamiento no tiene porqué ser suave, por ello la transformada wavelet resulta eficiente para extraer información.
Otra de las ventajas de dicha transformada frente a otros métodos es el de poder disponer de una amplia familia de ellas, lo cual permite tratar imágenes de diversa índole. Así que la elección de la wavelet dependerá del tipo de imagen que analicemos.
Las wavelets pueden ser utilizadas en problemas que afectan al tratamiento de señales e imágenes digitales, ya que representa una potente herramienta para resolverlos. Podemos utilizarla para los siguientes problemas:
• Reducción del ruido (en señales de audio y en imágenes).
• Compresión de señales (de vital importancia tanto en la transmisión de grandes cantidades de datos como en su almacenamiento).
La transformada wavelet discreta es una transformación de la señal que la divide en dos tipos de subseñales:
• La tendencia viene a ser una copia de la señal a menor resolución.
• Las fluctuaciones almacenan información referida a los cambios locales en la señal original.
La tendencia y las fluctuaciones más significativas permiten una compresión de la imagen, con la finalidad de descartar información irrelevante y así proceder a la eliminación de un ruido producido por algunos aparatos y condiciones de medida. [11]
3.2 WAVELETS
Llamada Transformada Wavelet, es una herramienta matemática desarrollada a mediados de los años ochenta. Nace a partir de la necesidad de analizar diversas funciones, debido a que en la naturaleza muchos de los procesos pueden ser modelados como funciones, ya sea discreto o continuo. El análisis de wavelets consiste en descomponer una señal en versiones escaladas móviles, de la wavelet original “madre”. [12]
Dentro de los usos de esta poderosa herramienta podemos nombrar, además del análisis local de señales no estacionarias, el análisis de señales electrocardiográficas, sísmicas, de sonido, de radar, así como también es utilizada para la compresión y procesamiento de imágenes y reconocimiento de patrones.
3.3 ANÁLISIS DE FUNCIONES
Las wavelets son funciones matemáticas que se pueden utilizar para filtrar series temporales de datos y analizar la variación de su contenido espectral, ofreciendo una representación tiempo-frecuencia más precisa.
3.3.1 Análisis de Fourier
Permite el análisis en el tiempo así como de la frecuencia de una función, pero solo uno a la vez. [11]
a0 + (ak coskt +bksinkt) --- (1)
a0= 1/2π
a0= 1/2π
a0= 1/2π
Fig. 3.1 Representación de la función de Fourier
de donde se obtiene la inversa
ƒ(t)= --- (3)
Fig. 3.2 Transformada de Fourier
Fig. 3.3 Descomposición de una señal por la transformada de Fourier.
3.3.2 Análisis de Wavelets
Permite el análisis “multirresolución”, mejorando notablemente el análisis en pequeños intervalos con gran cantidad de información.
Ψa,b(t)= --- (4)
Utilizando la base díadica.
Ψj.k = 2 j /2
Ψ ( 2j t - k)--- (5) con a = 2-j y b = 2 –j k
Wgf (b,a) = (f *ψa)(b) con
Ψ(t) = ψ(-t) (f1 * f2)(x)= ʃℝ f1(x-t)f2(t)dt
Fig. 3.5. Transformada de Wavelet.
Fig. 3.6. Descomposición de una señal por la transformada Wavelet
3.4 BASES WAVELET
Sabemos que al hacer una proyección de una función, en base a una función de escala ortonormal, resulta que obtenemos una aproximación con pocos detalles de dicha función, posiblemente en un nivel de resolución particular, así que perdemos algo de información en el proceso. Esto significa que la función de escala f no es completa a cualquier nivel. Por lo tanto, se usan las proyecciones sobre otras funciones, denominadas wavelet ortonormales (o simplemente
wavelets), para obtener la información complementaria de los detalles de la función. La Transformada Wavelet es la descomposición de f(x) en una base de funciones formada por la traslación y dilatación de una misma función, la función de escala.
La descomposición de funciones y su reconstrucción puede ser computada mediante el algoritmo piramidal donde, en cada nivel de resolución, la función se descompone en una aproximación detalle más una aproximación gruesa llamada
tendencia.
La Transformada Wavelet de una función f(x) en dos dimensiones tiene aplicaciones en el procesamiento de imágenes. [13]
3.5 ALGORITMO DE LA TRANSFORMADA WAVELET PIRAMIDAL
En esta sección se describirá el algoritmo mediante el cual se calcula la Transformada Wavelet Discreta con estructura piramidal, en los casos de arreglos bidimensionales, para posteriormente utilizar las bases ortonormales de Daubechies.
3.5.1 Transformada Wavelet Piramidal. Algoritmo
Esto permite elegir la base de funciones cuya forma se aproxime mejor a las características de la señal que se desea representar o analizar.
Las wavelet de Daubechies, en la transformada Wavelet son las más utilizadas para el procesamiento digital y análisis de imágenes, estas tienen la propiedad de formar una base ortonormal y poseen soporte compacto. Por esta razón, son adecuadas para el análisis de señales con soporte finito (por ejemplo: notas musicales, electrocardiogramas, sismogramas, etc.) y en particular para el análisis y procesamiento de imágenes.
Debido a la condición de ortonormalidad, se asegura la independencia de la representación de la señal en los diferentes niveles de descomposición, es decir, que no se genera información redundante de la señal, y así, se evita la aparición de información falsa. Además, las bases de Daubechies permiten calcular la transformada Wavelet mediante un algoritmo menos complejo, con un bajo costo computacional y numéricamente estable (los cálculos realizados son confiables dentro de la precisión numérica de la computadora), lo cual las hace eficientes.
En el cálculo práctico de la transformada wavelet ortonormal, mediante bases wavelet de Daubechies se utiliza un conjunto de filtros discretos paso-bajo y paso-alto, p(n) y q(n). De esta forma, dado un vector de datos de longitud igual a un número entero potencia de dos, la descomposición y reconstrucción wavelet ortonormal se implementa con el algoritmo piramidal iterando estos filtros. [13]
Cabe mencionar que dichos filtros permiten que el análisis se concentre tanto en las frecuencias (filtro pasa baja), como en el tiempo (filtro pasa alta). Además permiten reconstruir la señal original de una manera apropiada. [12]
Los filtros periódicos p(n) y q(n), son filtros de soporte compacto con un número finito N de coeficientes distintos de cero, es decir, el grado de los filtros es (N–1). Por lo tanto, los dos conjuntos de filtros forman una matriz de 2xN:
Fig. 3.6 Ejemplo de una matriz 2xN
3.5.2 Funciones de Daubechies
Como mencionamos anteriormente utilizamos las bases wavelets de Daubechies. Esta clase incluye un rango de funciones que se extiende desde funciones altamente localizadas a funciones altamente suavizadas. Dentro de esta clase encontramos DAUB4, DAUB6, DAUB8, etc., hasta DAUB20, donde el número de Daubechies indica la cantidad de coeficientes distintos de cero.
Por lo tanto, la más simple y más localizada es DAUB4, que tiene solo cuatro coeficientes no nulos. La decisión con respecto a cuál base de Daubechies es la más conveniente debe basarse en la forma de la señal a analizar. Esto es, se debe utilizar la wavelet que provea la mejor descripción de la señal con el menor número de coeficientes no nulos. [13]
3.5.3 Número de operaciones
Consideremos ahora el número de operaciones requerido para la Transformada Wavelet ortonormal de un vector de datos. Sea L la longitud del vector de datos y N la longitud de los filtros p(n) y q(n). En la banda de frecuencia más alta, el primer paso de descomposición requiere 2NL multiplicaciones y sumas. En el algoritmo piramidal, en la siguiente banda de frecuencia más ancha la longitud del vector de aproximación discreta c(n), está reducida a N/2. Por lo tanto, el próximo paso de descomposición requiere 2(NL/2) multiplicaciones y sumas.
3.6 TRANSFORMADA WAVELET BIDIMENSIONAL
Para el caso de procesamiento de imágenes, la imagen original constituye la matriz de datos inicial c0(x,y), mostrado en la figura 3.7 (a)
Fig. 3.7 Pasos del proceso de descomposición de una imagen; (a)Imagen original, (b) Descomposición en dirección vertical, (c) Descomposición de (b) en dirección horizontal (Resultado final).
En cada nivel i de resolución se calcula la correlación entre las filas de
ci–1(x,y) y los filtros unidimensionales p(n) y q(n) en la dirección vertical, resultando
dos imágenes compuestas, cada una por la mitad de las filas de la matriz (Fig. 3.7 (b)). Luego se calcula la correlación entre estas imágenes y los filtros p(n) y q(n) en la dirección horizontal resultando, de cada una, dos imágenes compuestas por la mitad de las columnas (Fig. 3.7(c)).
Estas cuatro subimágenes resultantes constituyen las tres imágenes detalle
y la imagen aproximación (tendencia o residuo). El proceso es ejecutado con un algoritmo piramidal como se muestra en la figura 3.8.
Si la imagen original tiene L2 pixeles, cada imagen ci(x,y), d1(x, y)i, d2(x, y)i y 3(x, y)i, tiene (L/2i)2 pixeles (i > 0). Entonces, el número total de pixeles de una representación wavelet ortonormal sigue siendo L2, es decir, la Transformada Wavelet noincrementa el volumen de datos.
La figura 3.9 muestra la descomposición de las tres imágenes detalle y la imagen tendencia en los niveles de resolución 1, 2, 3.
Fig. 3.9. Esquema de la descomposición Wavelet piramidal en dos dimensiones
3.7 TRANSFORMADA WAVELET CONTINUA (CWT)
La Transformada Wavelet Continua (CWT) se utiliza para descomponer una señal en wavelets, las pequeñas oscilaciones que están muy localizados en el tiempo. Considerando que la transformada de Fourier descompone una señal de longitud infinita en senos y cosenos, propiciando la pérdida de todos los tiempos y la localización de información.
La base de CWT se centra en escalar y desplazar las versiones localizadas de tiempo en base a una wavelet madre, y es utilizada para construir representaciones en tiempo-frecuencia de una señal, que ofrecen muy buen tiempo y frecuencia de localización.
La CWT es una convolución de la secuencia de datos a escala con una versión traducida de la wavelet madre.
La transformada continua para las wavelets se puede definir como:
CWT(b,a) = (x(t),ψa,b(t))= ʃ -- (7)
A partir de la cual se puede obtener la inversa:
x(t)= Cψ -1
ʃ CWT(b,a) a,b ( ) da db ---(8)
Cψ = df <
3.8 TRANSFORMADA WAVELET DISCRETA (DWT)
La DWT aplicada a imágenes proporciona una matriz de coeficientes, conocidos como coeficientes wavelet. Si a una imagen le aplicamos la DWT obtenemos cuatro tipos de coeficientes: aproximaciones, detalles horizontales, detalles verticales y detalles diagonales. La aproximación contiene la mayor parte de la energía de la imagen, es decir, la información más importante, mientras que los detalles tienen valores próximos a cero.
La elección de las wavelets analizadoras juega un papel muy importante en los resultados finales. Entre las características más importantes a tener en cuenta se encuentran: soporte compacto, simetría, etc. Las wavelets biortogonales son las más eficientes para un posterior proceso de compresión, y en particular, aquellas con pocos coeficientes, ya que el coste de obtención de los coeficientes se incrementa con su número.
Así, al desplazarse de los niveles más altos a los más bajos, o sea, de baja resolución a alta resolución, se observa una disminución de la energía contenida en las sub bandas recorridas.
Si los coeficientes wavelet obtenidos por medio de la transformada wavelet discreta (DWT) para un nivel concreto poseen pequeñas magnitudes (valores próximos a cero), se espera que esos coeficientes wavelet estén en los primeros niveles de descomposición. El aumento del nivel de descomposición wavelet produce unos coeficientes con mayores magnitudes. Adicionalmente, se puede comprobar cómo existen similitudes espaciales a través de las sub bandas. [13]
Fig. 3.10 a) Imagen original, b) Organización de los coeficientes wavelets
3.9 WAVELETS Y RUIDO
Sabemos que en el tratamiento de las imágenes digitales es muy común encontrarnos con un fenómeno llamado ruido, que aparece de improvisto y por varias circunstancias. Para el caso de las imágenes obtenidas a través de ultrasonidos, este ruido se denomina “speckle”, que es un efecto granulado causado por la interferencia en el sensor de la cámara, más específicamente es característico del laser. Este ruido dificulta la percepción y la extracción de los detalles de la imagen.
En la actualidad existen varios métodos para eliminar el speckle. El método que utilizaremos es el enfoque de wavelets hace una mejora suave en la imagen, esta mejora implica suavizar y preservar las zonas, así como bordes de la imagen que son detalles finos.
La aplicación de este método ha demostrado una mejora significativa en la reducción de speckle.
Los métodos utilizados para la reducción del speckle pueden ser divididos aproximadamente en dos categorías:
• La primera categoría: Es donde se mejora la imagen, que no es más que el resumen de varias observaciones del mismo objeto. Para asumir que ningún cambio o movimiento del objeto sucedió durante la recepción de observaciones.
• La segunda categoría: Es donde se mejora la imagen a través de modelos estadísticos, por ello existen varios métodos que se han desarrollado con el fin de reducir el speckle en una variedad de imágenes de área.
El enfoque estadístico, basado en transformar wavelets, resulta muy efectivo en la aplicación de señales biomédicas. [14]
3.10 WAVELET EN MATLAB
En Matlab encontramos la llamada caja de herramientas wavelet, que proporciona herramientas gráficas y de línea de comandos, que nos permiten:
• Examinar y estudiar las propiedades de cada uno de los paquetes wavelet.
• Examinar estadísticas de señales y componentes de la señal.
• Realizar el análisis y la síntesis discreta de señales de dos dimensiones.
Además de lo anterior, la caja de herramientas hace que sea fácil personalizar la presentación y visualización de datos, permite elegir:
• ¿Qué imágenes vamos a mostrar?
• La región que nos interesa ampliar.
• Esquemas de color para la visualización de onda y sus coeficientes de detalles. [15]
CAPÍTULO IV: IMÁGENES MEDICAS, ULTRASONIDO.
En este capítulo, se hará una breve introducción del ultrasonido como útil herramienta para la obtención de imágenes, debido a su resolución temporal, portabilidad y bajo costo. Ayuda en el diagnóstico de los órganos sin necesidad de invasión, ni utilización de Rayos X. [14]
4.1 INTRODUCCIÓN
Las imágenes por ultrasonido, también denominadas exploración por ultrasonido o ecografía, suponen exponer parte del cuerpo a ondas acústicas de alta frecuencia para producir imágenes del interior del organismo. Los exámenes por ultrasonido no utilizan radiación ionizante (rayos x). Debido a que las imágenes por ultrasonido se capturan en tiempo real, pueden mostrar la estructura y el movimiento de los órganos internos del cuerpo, como así también la sangre que fluye por los vasos sanguíneos. El ultrasonido convencional presenta las imágenes en secciones delgadas y planas del cuerpo.
Los avances en la tecnología con ultrasonido incluyen el ultrasonido tridimensional (3-D) que transforma los datos de ondas acústicas en imágenes de 3-D. Las imágenes de un ultrasonido en cuatro dimensiones (4-D) consisten en un ultrasonido en 3-D en movimiento. [15]
Existen tres tipos de ultrasonido Doppler:
Doppler a color; utiliza una computadora para convertir las mediciones Doppler en un conjunto de colores para visualizar la velocidad y la dirección del flujo sanguíneo a través de un vaso sanguíneo.
Fig. 5.1 Ultrasonido Doppler a color, muestra las venas
Doppler con energía: es una técnica más avanzada que es más sensible que el Doppler a color y es capaz de brindar un mayor detalle del flujo sanguíneo, especialmente en los vasos que se encuentran dentro de los órganos. No obstante, el Doppler con energía no ayuda al radiólogo a determinar la dirección del flujo, que puede ser importante en algunas situaciones.
Doppler espectral: exhibe las mediciones de flujo sanguíneo de manera gráfica, en función de la distancia recorrida por unidad de tiempo.
Fig. 5.3 Ultrasonido Doppler espectral.
4.2 USOS COMUNES DEL ULTRASONIDO
Los exámenes por ultrasonido pueden ayudar a diagnosticar diversas enfermedades y a evaluar el daño en los órganos luego de una enfermedad. Ayuda a los médicos a examinar muchos de los órganos internos del cuerpo, incluyendo en forma enunciativa y no limitativa:
• Corazón y vasos sanguíneos, incluyendo la aorta abdominal y sus principales ramificaciones.
• Hígado.
• Vesicular biliar. • Bazo.
• Páncreas. • Riñones. • Vejiga.
• Útero, ovarios y niño no nato (feto) en pacientes embarazadas.
• Ojos.
El ultrasonido también se usa para:
• Guiar procedimientos como biopsias por aspiración, en las que se usan agujas para extraer muestras de células de un área anormal para realizar pruebas de laboratorio.
• Obtener una imagen de los senos y guiar la biopsia del cáncer de seno.
• Diagnosticar diversas enfermedades coronarias y evaluar el daño luego de un ataque al corazón u otra enfermedad.
Las imágenes por ultrasonido Doppler pueden ayudar al médico a ver y evaluar:
• Obstrucciones en el flujo sanguíneo (tales como coágulos)
• Estrechamiento de los vasos sanguíneos.
• Tumores o malformaciones congénitas
4.3 COMO FUNCIONA
Las imágenes por ultrasonido están basadas en el mismo principio que se relaciona con el sonar utilizado por los murciélagos, barcos y pescadores. Cuando una onda acústica choca contra un objeto, rebota hacia atrás, o hace eco. Al medir estas ondas causadas por el eco es posible determinar la distancia a la que se encuentra el objeto así como su forma, tamaño, consistencia y uniformidad.
En medicina, el ultrasonido se utiliza para detectar cambios en el aspecto y función de los órganos, tejidos, o masas anormales como los tumores.
A medida que las ondas acústicas rebotan en los órganos fluidos y tejidos internos, el micrófono sensible del transductor registra los cambios mínimos que se producen en el tono y dirección del sonido. Una computadora mide y muestra estas ondas de trazo en forma instantánea, que a su vez crea una imagen en tiempo real en el monitor. Estas imágenes en vivo en general se registran en una cinta de video y se capturan como imagen estática una o más estructuras de las imágenes en movimiento.
El ultrasonido Doppler, mide la dirección y velocidad de las células sanguíneas a medida que se mueven por los vasos. El movimiento de las células sanguíneas causa un cambio en el tono de las ondas acústicas reflejadas (denominado efecto Doppler). Una computadora recopila y procesa los sonidos y crea gráficos o imágenes que representan el flujo sanguíneo a través de los vasos sanguíneos. [15]
4.3.1 Ecos de ultrasonido
Son sonidos con frecuencias cercanas a los 20KHz, no perceptibles por el oído humano. Cuando se emite un ruido corto a través de medios con coeficiente de reflexión bajo y reflejado por obstáculos a través de su propagación, la detección de la reflexión de la onda ultrasónica puede ayudar a localizar el obstáculo. Este principio es usado por los mamíferos marinos. Las frecuencias usadas para imágenes varían significativamente dependiendo de su aplicación.
4.3.2 Ecuación de la onda
Las partículas del medio se pueden mover en dirección paralela (onda longitudinal) o perpendicular (onda transversal) a la dirección de propagación de la onda.
Fig. 5.4 a) Movimiento de la partícula, b) Propagación de la onda.
Teniendo en cuenta que en ultrasonido las ondas son longitudinales, la ecuación que relaciona la segunda diferencia del desplazamiento de una partícula con respecto a la aceleración de un oscilador armónico simple es:
o --- (1)
donde:
c es la rapidez del sonido dada por: c = --- (2)
p es la densidad del medio.
k es la compresibilidad del medio y es igual a (2π)/λ conocida también como constante de propagación.
j = donde λ denota la longitud de onda.
4.3.3 Dispersión en el tejido
El campo de dispersión de retorno es usado para generar la imagen ultrasónica. Algunos puntos son producidos por las interferencias constructivas y destructivas de las señales dispersas a partir de estructuras menores a la longitud de onda, por lo tanto, aparecen como ecos brillantes y oscuros respectivamente. Además, estos puntos no necesariamente están relacionados con una estructura particular del tejido. [14]
4.3.4 Efectos biofísicos de los ultrasonidos
4.3.4.1 Efecto mecánico.
Es el primer efecto que se produce en el tejido, ha sido llamado micro masaje debido a que las vibraciones sónicas causan compresión y expansión en el tejido a la misma frecuencia que el ultrasonido, conduciendo a variaciones de presión, las mayores variaciones se producen en los límites entre dos medios diferentes. Estas variaciones de presión en los tejidos provocan:
• cambios en el volumen de las células corporales ± 0,02%.
• cambios en la permeabilidad de las células y las membranas tisulares todos los efectos de la terapia ultrasónica son causados por el micro masaje.
4.3.4.2 Efecto térmico.
El micro masaje de los tejidos conduce a la generación de calorpor fricción, siendo esta la acción mas conocida de los ultrasonidos, la cantidad de calor generado difiere en los diversos tejidos y depende además de varios factores como son:
• Tipo de emisión (continuo o pulsátil).
• Intensidad.
• Duración del tratamiento.
El calor se genera especialmente en tejido óseo, cartílago, tendones, músculos y piel.
4.3.4.3 Efectos biológicos.
Estos efectos se consideran una respuesta fisiológica a las acciones mecánicas y térmicas.
Fig. 5.5. Los efectos biológicos son resultado del efecto mecánico y efecto térmico.
1. Favorece la estimulación de la circulación sanguínea por vasodilatación, la cual está dada por la liberación de estimulantes tisulares, estimulación de las fibras nerviosas aferentes y reducción del tono muscular.
2. Relajación muscular por eliminación de los estimulantes tisulares, de las fibras nerviosas aferentes y depresión postexcitatoria de la actividad ortosimpatica. 3. Aumento de la permeabilidad de la membrana, forzando el fluido tisular a través de esta, haciendo que el ph se haga menos acido (efecto antiacidotico), de gran utilidad en el tratamiento del reumatismo de partes blandas donde hay acidosis tisular.
4. Aumento de la regeneración tisular sobre todo con el efecto mecánico el cual produce un flujo de partículas con movimiento libre.
6. Reducción del dolor debido a la mejoría de la circulación tisular, normalización del tono muscular, reducción de la tensión tisular, estimulación de las fibras nerviosas aferentes y reducción del ph.
7. Otros efectos dados por la influencia negativa del ultrasonido como son: • Daño tisular (las diferencias de presión generadas por ultrasonido puede causar cavitación de los tejidos por lo que su intensidad deberá ser bien ajustada de forma que el paciente no sienta excitación dolorosa).
• Estasis de las células sanguíneas (este trastorno es reversible y se elimina con un movimiento continuo de la cabeza de tratamiento).
• Efectos secundarios discretos dados por sobredosificación (reducción del nivel de glucosa en sangre, fatiga, nerviosismo, anorexia, estreñimiento). [16]
4.4 RUIDO EN ULTRASONIDO
Las imágenes de ultrasonido presentan un especial tipo de ruido llamado Speckle. El cual degrada significativamente la calidad de la imagen, aumentando de esta forma la dificultad de discriminar detalles finos en las imágenes durante un examen de diagnostico. También dificulta el procesado de las imágenes, tales como la segmentación y la detección de bordes.
4.4.1 Naturaleza del ruido
Los diferentes fenómenos de degradación de una imagen de ultrasonidos son:
4.4.1.1 Fenómeno de absorción
4.4.1.2 Fenómeno de reflexión
Los rayos son reflejados varias veces antes de regresar al transductor. Estos rayos no son tomados en cuenta en el modelo de la señal.
4.4.1.3 Fenómeno de difusión
Los objetos que tienen tamaño similar a la longitud de onda, de la onda de ultrasonido, oscilan emitiendo en todas las direcciones la onda incidente. Esta transmisión, es la responsable del ruido llamado speckle, indudablemente uno de los más importantes factores de degradación de la señal.
4.5 SPECKLE
Speckle es el término utilizado para describir el patrón granular presente en las imágenes de ultrasonido, considerado como un tipo de ruido multiplicativo a la señal. Existen varias aproximaciones para describir el Speckle. Varios investigadores de imágenes de ultrasonido, usan un análisis estocástico para describir las características del Speckle.
Debido a que es formado por la suma de ecos de señales, generadas aleatoriamente en los centros de difusión, cada uno previendo una cantidad aleatoria de energía, se puede demostrar por estadística del brillo en una imagen de ultrasonido depende mayormente del numero de " dispersores de resolución por la célula", y de la distribución espacial de los puntos de difusión, en el cual podemos identificar 3 modelos:
• El primero es para cuando hay una presencia grande de puntos de difusión, modelado por la distribución de Rayleigh.
• El segundo es para cuando agregamos la componente en fase, entonces el brillo puede ser estimado por la distribución de Rician.
CAPÍTULO V: PRUEBAS Y RESULTADOS
En el capítulo mostraremos los resultados obtenidos a través de la manipulación de las imágenes, a través de las técnicas explicadas en capítulos anteriores con el objetivo de ampliar o modificar todo el proceso de la imagen para la observación de estructuras internas, inaccesibles a los métodos comunes de imágenes, estas imágenes resultantes se han observado, evaluado, y clasificado.
5.1 INTRODUCCIÓN
El procesamiento de imagen puede considerarse como un tipo especial del procesamiento digital en dos dimensiones, este procesamiento es normalmente un conjunto de pasos involucrados en la percepción visual que es descompuesto como una jerarquía que va desde:
*Visión de Bajo Nivel. *Visión de Medio Nivel. *Visión de Alto Nivel.