INSTITUTO POLIT´
ECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIER´
IA
MEC ´
ANICA Y EL ´
ECTRICA
ESPECIALIDAD DE CONTROL
REGULACI ´
ON DE UN ROBOT R´
IGIDO
DE DOS GRADOS DE LIBERTAD
EN TIEMPO REAL
T
E
S
I
S
PARA OBTENER EL T´ITULO DE:
INGENIER´
IA
EN
COMUNICACIONES
Y
ELECTR ´
ONICA
P R E S E N T A:
C.
JUAN
HEBERTO
SAMPERIO
LEAL
DIRECTORES DE TESIS:
Dr. Ram´
on Silva Ortigoza
Dr. Abraham Rodr´ıguez Mota
´
Indice general
1. Introducci´on 1
1.1. Objetivos del trabajo . . . 1
1.2. Planteamiento del problema . . . 3
1.3. Retos principales . . . 3
1.4. Recursos . . . 3
1.5. Estructura del trabajo . . . 4
2. Rob´otica de manipuladores 7 2.1. Antecedentes . . . 7
2.1.1. Robot industrial . . . 8
2.1.2. Sistema mec´anico . . . 10
2.1.3. Actuadores . . . 10
2.1.4. Sensores y sistemas de control . . . 11
2.2. Estado del arte . . . 13
2.2.1. Control de posici´on . . . 13
3. Modelo cinem´atico y din´amico del brazo rob´otico 17 3.1. Articulaciones y estructuras b´asicas . . . 17
3.1.1. Articulaciones . . . 17
3.1.2. Configuraciones b´asicas . . . 19
3.2. Modelo cinem´atico directo . . . 20
3.3. Modelo din´amico . . . 24
3.4. Representaci´on en variables de estado . . . 30
4. Robot r´ıgido de dos grados de libertad 33 4.1. Descripci´on general de funcionamiento . . . 33
4.1.1. Etapa 1: Subsistemas . . . 34
4.1.2. Etapa 2: Electr´onica . . . 35
4.1.3. Etapa 3: Adquisici´on de datos y control . . . 35
4.2. Etapa 1: Subsistemas . . . 35
4.2.1. Subsistema a: Actuadores . . . 36
4.2.2. Subsistema b: Dise˜no mec´anico . . . 39
4.3. Etapa 2: Electr´onica . . . 45
4.3.1. Subetapa 1: Circuito fuente de tensi´on positiva . . . 47
4.3.2. Subetapa 2: Circuito acondicionador de se˜nales del puente H . . . 49
4.3.3. Subetapa 3: Circuito puente H . . . 50
4.3.4. Subetapa 4: Circuito acondicionador de se˜nal del encoder . . . 51
4.4. Etapa 3: Adquisici´on de datos y control . . . 52
4.4.1. Circuito interfaz DSP-Brazo rob´otico . . . 53
4.5. Prototipo terminado . . . 54
5. Control PID y simulaciones 59 5.1. Sistema Motor-Resorte . . . 59
5.2. Sinton´ıa de un controlador PID para un robot de n g.d.l . . . 63
5.2.1. Criterio de sinton´ıa 1 . . . 63
5.2.2. Criterio de sinton´ıa 2 . . . 66
5.3. Criterio de sinton´ıa 2 aplicado al prototipo . . . 67
5.4. Simulacion . . . 71
5.4.1. Definici´on del modelo en Simulinkr . . . . 71
5.4.2. Simulaci´on y discusi´on de resultados . . . 72
6. Control en tiempo real 75 6.1. Definici´on del modelo en Simulinkr para tiempo real . . . . 75
6.2. Tiempo real y discusi´on de resultados . . . 76
7. Conclusiones 79 7.1. Trabajos futuros . . . 80
Referencias 83 A. Hojas t´ecnicas de los motores y sensores 87 A.1. Motor Pittman GM14904S014 . . . 88
A.2. Motor Pittman GM8724S015 . . . 90
B. Dibujos t´ecnicos del robot 93 B.1. Base del brazo rob´otico . . . 94
B.2. Estructura del brazo rob´otico . . . 95
B.3. Base de motor . . . 96
B.4. Soporte en ´angulo . . . 97
B.5. Eslabones . . . 98
B.5.1. Eslab´on 2 . . . 99
B.6. Ejes de uni´on de motor con eslab´on . . . 100
B.6.1. Eje secundario . . . 101
B.7. Soportes entre motor y eje de uni´on . . . 102
B.7.1. Soporte del rodamiento del eslab´on 1 . . . 103
B.8. Bridas . . . 104
B.8.1. Brida superior . . . 105
´
INDICE GENERAL vii
C. Hojas de t´ecnica de componentes electr´onicos 107
C.1. Optoacoplador 6N317 . . . 108
C.2. Puente H LMD18200 . . . 109
C.3. Buffer 74HC541 . . . 110
C.4. Regulador de tensi´on positiva LM7805 y LM78012 . . . 111
´
Indice de figuras
2.1. Robot manipulador KR 1000 TITAN [27]. . . 9
2.2. Robots r´ıgidos. . . 10
3.1. Articulaciones b´asicas. . . 18
3.2. Configuraciones b´asicas de un robot. . . 19
3.3. Diagrama abstracto de un robot manipulador de n g.d.l. . . 21
3.4. Brazo rob´otico de dos g.d.l. bajo estudio. . . 23
4.1. Diagrama general del prototipo del brazo rob´otico. . . 34
4.2. Disposici´on de los eslabones. . . 37
4.3. Motores del brazo rob´otico. . . 38
4.4. Dise˜no previo del robot r´ıgido en SolidWorksr. . . . . 40
4.5. Dise˜no de la base. . . 41
4.6. Dise˜no de la estructura del robot. . . 41
4.7. Dise˜no de la base del motor principal. . . 42
4.8. Dise˜no de los soportes. . . 42
4.9. Dise˜no de los eslabones del brazo rob´otico. . . 43
4.10. Dise˜no de los ejes de uni´on motor-eslab´on. . . 44
4.11. Dise˜no de las bridas de soporte del motor. . . 45
4.12. Dise˜no de los soportes entre el motor y eje del eslab´on. . . 46
4.13. Piezas del brazo rob´otico. . . 47
4.14. Esquema general del subsistema electr´onico. . . 48
4.15. Circuito fuente de tensi´on positiva. . . 48
4.16. Diagrama esquem´atico de acondicionador de se˜nal del puente H. . . 49
4.17. Control Signo - Magnitud. . . 50
4.18. Diagrama esquem´atico puente H. . . 51
4.19. Tarjeta dise˜nada del puente H y acondicionador de se˜nal del encoder. . . 51
4.20. Diagrama esquem´atico circuito acondicionador de se˜nales del encoder. . . 52
4.21. Tarjeta controladora DS1104. . . 53
4.22. Diagrama esquem´atico del circuito interfaz. . . 54
4.23. Tarjeta dise˜nada del circuito interfaz. . . 55
4.24. Distribuci´on de se˜nales en el conector DB25. . . 56
4.25. Panel de pruebas de la tarjeta DS 1104. . . 56
4.26. Dise˜no del brazo rob´otico. . . 57
4.27. Vistas generales del brazo rob´otico. . . 58
5.1. Diagrama motor resorte. . . 61
5.2. Sistema completo de la simulaci´on. . . 73
5.3. Gr´afica de la simulaci´on de la tarea de regulaci´on a 90o. . . . 74
6.1. Sistema completo en tiempo real. . . 77
Cap´ıtulo 1
Introducci´
on
1.1.
Objetivos del trabajo
El objetivo general de este trabajo es dise˜nar un controlador PID para la regulaci´on de un robot r´ıgido, e implementaci´on de este controlador en tiempo real con la ayuda de una tarjeta controladora (DS1104). Para lograr este objetivo general se deben cumplir una serie de objetivos espec´ıficos, los cuales se relacionan estrechamente con la metodolog´ıa utilizada para el desarrollo del presente proyecto. A continuaci´on se presentan dichos objetivos espec´ıficos.
1. Deducir los modelos cinem´atico directo y din´amico del robot manipulador.
2. Desarrollar un controlador PID para la tarea de regulaci´on, basado en el modelo din´amico.
3. Realizar la simulaci´on del controlador PID para el control de posici´on, utilizando el software Matlabr Simulinkr.
4. Construir las tarjetas electr´onicas necesarias para la parte dePotencia(Ver cap´ıtu-lo 4.3). As´ı mismo, como para la comunicaci´on del robot manipulador con la tarjeta de control DSPACE modelo DS1104 (Ver cap´ıtulo 4.4).
5. Desarrollar una interfaz gr´afica con el software ControlDesk que se integre a la ley de control en tiempo real propuesta en el numeral 2 desarrollada con Matlabr
Simulinkr.
6. Comparar los resultados experimentales, con los obtenidos a nivel simulaci´on.
7. Reportar los resultados experimentales obtenidos.
Para comprender mejor las caracter´ısticas y alcances del proyecto propuesto, a con-tinuaci´on se describen con mayor detalle los objetivos espec´ıficos listados previamente.
1. El modelo cinem´atico es la soluci´on al problema geom´etrico de calcular la posici´on y orientaci´on del efector final del robot. Dados una serie de ´angulos entre las articulaciones, el modelo cinem´atico directo se emplea para el calculo de la posici´on y orientaci´on del marco de referencia del efector final con respecto al marco de la base.
El modelo din´amico permite determinar la regla matem´atica que vincula las vari-ables de entrada y salida. Generalmente, dicha caracterizaci´on matem´atica se manifiesta por medio de ecuaciones diferenciales. El estudio del comportamiento din´amico resulta imprescindible cuando se desea dise˜nar robots de altas presta-ciones, teniendo en cuenta aceleraciones significativas y masas considerables. Ex-isten diferentes m´etodos que permiten formular el modelo din´amico de un robot manipulador, en este casos, es conveniente emplear las ecuaciones de movimiento de Lagrange.
2. El control PID de robots manipuladores se utiliza a nivel industrial, lo que lo convierte en uno de los controladores m´as importantes desde el punto de vista pr´actico. Por lo tanto en est´a tesis se explica como sintonizar un controlador PID y se estudian algunas de sus caracter´ısticas m´as importantes.
3. La simulaci´on del sistema tiene como finalidad principal el permitir la observaci´on del funcionamiento del sistema mediante resultados gr´aficos, que faciliten la com-prensi´on del comportamiento del sistema o la evaluaci´on de nuevas estrategias de control, dentro de los l´ımites impuestos por los criterios seleccionados de operaci´on.
4. El construir tarjetas electr´onicas que permitan el buen funcionamiento de los mo-tores, las fuentes de voltaje, el acondicionamiento de se˜nales y la adecuada comu-nicaci´on entre el robot r´ıgido y el sistema de control.
5. El ambiente gr´afico propuesto permite el manejo del robot r´ıgido, posibilitando la comunicaci´on hombre-m´aquina de una forma sencilla, obteniendo gr´aficas en tiempo real y permitiendo el ajuste de los par´ametros del controlador PID y el control de la posici´on del manipulador.
6. La comparaci´on de los resultados permite encontrar diferencias o semejanzas en-tre los datos obtenidos a nivel simulaci´on y experimental, permitiendo evaluar la eficiencia y desempe˜no de la ley de control empleada en el robot r´ıgido.
1.2. PLANTEAMIENTO DEL PROBLEMA 3
1.2.
Planteamiento del problema
La regulaci´on es un problema muy com´un, siendo objeto de estudio dentro de la investigaci´on de la rob´otica, dado que existen diferentes t´ecnicas de control para este tipo de problema. En la mayor´ıa de estudios sobre robots manipuladores [11, 12, 14, 13, 23, 26, 20], ´unicamente se presentan resultados a nivel simulaci´on, sin el acompa˜namiento de resultados pr´acticos obtenidos de experimentaci´on con prototipos f´ısicos implementados. En el presente trabajo se implementa un controlador PID, siendo un control muy confiable para robots manipuladores. La evidencia cotidiana del uso de robots manip-uladores pone de manifiesto el buen servicio que se logra en una amplia variedad de aplicaciones cuando se emplea el control PID.
1.3.
Retos principales
Para lograr los objetivos antes mencionados se tienen que considerar una serie de retos a superar. La magnitud de las complicaciones asociadas a cada reto var´ıan de acuerdo a las actividades de desarrollo. Por lo tanto, a manera de resumen, se enumeran las principales actividades dentro del proyecto.
1. Analizar los modelos cinem´atico y din´amico del robot manipulador de dos grados de libertad.
2. Dise˜no y construcci´on de los circuitos electr´onicos de la etapa de Potencia del sistema.
3. Dise˜no y desarrollo de la interfaz de comunicaci´on entre los elementos de hardware del robot manipulador y los circuitos de control.
4. La sintonizaci´on adecuada del control PID para el manipulador.
5. Utilizaci´on del software Matlabr Simulinkr para implementar la ley de control
dise˜nada, y ControlDesk con Matlabr Simulinkr para el desarrollo del ambiente
gr´afico.
Adicionalmente, se considera la instrumentaci´on de la ley de control en tiempo real y la comprobaci´on de los resultados obtenidos.
1.4.
Recursos
A continuaci´on se describe en forma general los principales recursos utilizados en el proyecto:
Tarjeta de control para el procesamiento digital de se˜nales marca DSPACE, modelo DS1104.
Instrumentos electr´onicos como mult´ımetro, osciloscopio y fuentes de poder.
Plataforma de desarrollo Matlabr Simulinkr versi´on R2009a y ControlDesk Basic
version 3.2.2, ejecut´andose sobre Windows XP, Service Pack 2 para el desarrollo de los elementos de software.
Un robot manipulador de dos grados de libertad. En este caso particular se uti-liz´o un robot perteneciente al ´Area de Mecatr´onica del Centro de Innovaci´on y Desarrollo Tecnol´ogico en C´omputo (CIDETEC-IPN), el cual fue elaborado con los recursos econ´omicos de los investigadores y de la SIP, mediante el proyecto con n´umero de registro 20090075.
1.5.
Estructura del trabajo
El presente trabajo de tesis est´a conformado por siete cap´ıtulos, los cuales se descri-ben brevemente a continuaci´on.
En el primer cap´ıtulo, se presentan los objetivos principal y espec´ıficos, as´ı como el planteamiento del problema, adem´as de los retos principales y los recursos empleados en este proyecto.
Dentro del segundo cap´ıtulo, se brinda una rese˜na hist´orica de la rob´otica y la de-scripci´on de la composici´on general de un robot manipulador. Adem´as se anuncian im-portantes resultados de algunas de las investigaciones m´as significativas sobre el control de robots manipuladores, en el contexto del control autom´atico.
A trav´es del tercer cap´ıtulo, se presenta los procesos de deducci´on y an´alisis de los modelos cinem´aticos y din´amico del robot manipulador de dos grados de libertad, concluy´endose el capitulo con la definici´on en espacios de estados del modelo din´amico. En el cuarto cap´ıtulo, se describe la estructura mec´anica del robot manipulador utilizado en el desarrollo de la tesis, as´ı mismo, el dise˜no y la construcci´on de las tarjetas electr´onicas de potencia (Ver cap´ıtulo 4.3) y comunicaci´on entre el robot r´ıgido y el sistema de control (Ver cap´ıtulo 4.4).
El desarrollo de la ley de control PID y la sintonizaci´on de este basado en el modelo din´amico del robot manipulador, se presenta dentro del quinto capitulo. As´ı mismo, la simulaci´on de la tarea de regulaci´on y los resultados obtenidos
La importancia de desarrolla el ambiente gr´afico se contiene en al capitulo sexto. As´ı como, la implementaci´on en tiempo real de la ley de control PID para el robot ma-nipulador mediante la tarjeta de control dSPACE modelo DS1104. Tambi´en se mostrar´an los resultados obtenidos de dicha implementaci´on.
1.5. ESTRUCTURA DEL TRABAJO 5
Cap´ıtulo 2
Rob´
otica de manipuladores
Haciendo una breve introducci´on a la rob´otica de manipuladores se define lo que es un robot industrial y los distintos tipos que existen. Posteriormente, se mencionan aspectos espec´ıficos de los cuales est´an formados, como sonEl estudio de sistemas mec´anicos, Ac-tuadores ySensores y sistemas de control de manipuladores de las ultimas tres d´ecadas. Finalmente, se tratan todos aquellos proyectos, investigaciones y desarrollos de ´ultima tecnolog´ıa realizados.
2.1.
Antecedentes
Durante las ´ultimas cuatro d´ecadas, el desarrollo de la rob´otica ha impactado den-tro de los m´as variados aspectos de la vida cotidiana. Su importancia ha trascendido notoriamente en la percepci´on actual del mundo que nos rodea, permiti´endonos desde explorar territorios que por su naturaleza son imposibles de ser sujetos a investigaci´on, experimentar en ambientes que ponen en riesgo la integridad f´ısica de los seres humanos, facilitar el manejo de materiales de alto riesgo, realizar tareas repetitivas que en una per-sona pueden resultar en lesiones a largo plazo, entretenimiento, comunicaciones, etc.
La rob´otica (t´ermino cuya creaci´on se atribuye a Isaac Asimov[1]) es una ciencia encaminada a dise˜nar y construir aparatos y sistemas capaces de realizar tareas propias de un ser humano. Est´a clase de aparatos son mejor conocidos como robots, los cuales se definen posteriormente. Actualmente, est´a ocupando un lugar destacado en la mod-ernizaci´on de diversos sectores industriales. El buen entendimiento y el desarrollo de aplicaciones de la rob´otica est´an condicionados al conocimiento de diversas disciplinas entre las que destacan la ingenier´ıa el´ectrica, mec´anica, industrial, la inform´atica y las matem´aticas [21].
En el t´ermino robot confluyen las im´agenes de m´aquinas para la realizaci´on de tra-bajos productivos y de imitaci´on de movimientos y comportamientos de seres vivos. Aparece por primera vez en 1921, en la obra teatral R.U.R (Rossum‘s Universal Robots) del novelista y autor checo Karel Caper en cuyo idioma la palabra “robota” significa fuerza de trabajo o servidumbre. El t´ermino tiene amplia aceptaci´on y pronto se aplica a aut´omatas construidos y exhibidos en ferias, tratando de imitar movimientos de seres
vivos pero tambi´en de demostrar t´ecnicas de control remoto, incluyendo en algunos casos funciones sensoriales primarias [24].
La maquinaria para la automatizaci´on r´ıgida dio paso al robot con el desarrollo de controladores r´apidos, basados en el microprocesador, as´ı como un empleo de servos en bucle cerrado, que permiten establecer con exactitud la posici´on real de los elementos del robot y establecer el error con la posici´on deseada. Esta evoluci´on ha dado origen a una serie de tipos de robots, los robots industriales, que se citan a continuaci´on [32]:
Manipuladores o r´ıgidos.
Robots de repetici´on y aprendizaje.
Robots aut´onomos o inteligentes.
Dentro de la clasificaci´on de los robots industriales se observa que existen los robots manipuladores o r´ıgidos, en este proyecto se empleara uno de este tipo. A continuaci´on, se define a detalle lo que es un robot industrial.
2.1.1.
Robot industrial
Los robots industriales figuran como piezas claves del mosaico que actualmente for-ma la rob´otica. Hoy en d´ıa se cuentan con varias definiciones, una de ellas es la defini-ci´on adoptada por la Federadefini-ci´on Internacional de Rob´otica (International Federation Robotics, IFR) bajo la norma ISO/TR 8373, la cual establece que un robot industrial industrial es [28]:
“Una maquina manipuladora controlada autom´aticamente, reprogramable y de usos m´ultiples, de tres o m´as grados de libertad (g. d. l.), pudiendo es-tar en un lugar fijo o m´ovil para su uso en aplicaciones de automatizaci´on industrial.”
En su aplicaci´on industrial, los robots industriales son com´unmente empleados en tareas repetitivas y de precisi´on, as´ı como en actividades que resultan peligrosas para operadores humanos.
La mayor parte de los robots se encuentran montados sobre bases est´aticas, los cuales son utilizados en la industria para acciones de ensamblado, soldadura, alimentaci´on de m´aquinas de CN1, etc., ver Figura 2.1.
De acuerdo a su grado de autonom´ıa, los robots pueden clasificarse en manipuladores o r´ıgidos, de funcionamiento repetitivo y aut´onomos o inteligentes.
En los robots manipuladores o r´ıgidos las tareas de percepci´on del entorno, planifi-caci´on y manipulaci´on compleja son realizadas por seres humanos. Es decir, el operador act´ua en un tiempo real cerrando un bucle de control de alto nivel. En manipulaci´on se emplean brazos y manos antropom´orficos con controladores autom´aticos que producen
1
2.1. ANTECEDENTES 9
Figura 2.1: Robot manipulador KR 1000 TITAN [27].
los movimientos del operador. Alternativamente, el operador mueve una r´eplica a escala del manipulador, reproduci´endose los movimientos en ´este [10].
Estos robots son interesantes para trabajos en localizaci´on remota (acceso dif´ıcil, medios contaminados o peligrosos), en tareas dif´ıciles de automatizar y en entornos no estructurados, tales como las que realizan en la construcci´on o en el mantenimiento de l´ıneas el´ectricas [19].
La mayor parte de los robots que se emplean en cadenas de producci´on industrial son de tipo de funcionamiento repetitivo. Estos robots normalmente realizan tareas pre-decibles e invariantes, con una limitada percepci´on del entorno. Son precisos, de alta repetibilidad y relativamente r´apidos. Su uso, tambi´en, incrementan la productividad ahorrando al hombre trabajos repetitivo y, eventualmente, muy penosos o peligrosos.
Los robotsaut´onomos o inteligentesson los mas evolucionados desde el punto de vista del procesamiento de informaci´on. Son m´aquinas capaces de percibir, modelar el entorno, planificar y actuar para alcanzar objetivos sin la intervenci´on, o con una intervenci´on muy peque˜na, de supervisores humanos [24].
2.1.2.
Sistema mec´
anico
El sistema mec´anico de un robot manipulador est´a compuestos por diversas artic-ulaciones. Normalmente se distingue entre el brazo y el ´organo terminal o efector final que puede ser intercambiable, empleando piezas o dispositivos espec´ıficos para distintas tareas.
El aumento del numero de articulaciones aporta mayor maniobrabilidad pero dificulta el problema del control, obteni´endose menos precisi´on por acumulaci´on de errores. Son comunes dos tipos de articulaciones: la de traslaci´on y la de rotaci´on.
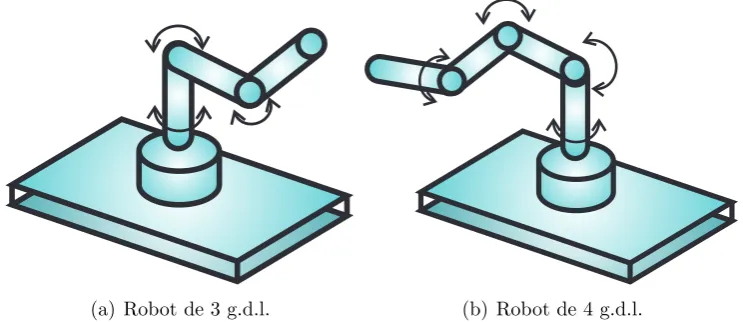
Una junta de traslaci´on, tambi´en conocida como junta deslizante, posibilita a un eslab´on deslizarse en l´ınea recta sobre otro. Una junta de rotaci´on, consider´andose el caso de arreglo con un grado de libertad, toma la forma de una bisagra entre un eslab´on y el pr´oximo. Dos o m´as articulaciones de ´estas puede combinarse estrechamente. Muchos robot industriales tiene menos de seis grados de rotaci´on o traslaci´on que se requieren para posicionar y orientar en el espacio el ´organo terminal [21]. La Figura 2.2 muestra un par de robots de 3 y 4 grados de libertad, respectivamente.
[image:20.595.116.488.315.476.2](a) Robot de 3 g.d.l. (b) Robot de 4 g.d.l.
Figura 2.2: Robots r´ıgidos.
2.1.3.
Actuadores
Los actuadores generan las fuerzas o pares necesarios para animar la estructura mec´anica. Usualmente, se utilizan tecnolog´ıas hidr´aulicas, para desarrollar potencias importantes, y neum´aticas, pero en la actualidad se ha extendido el uso de motores el´ectricos, y en particular motores de corriente continua servocontrolados, emple´andose en algunos casos motores paso a paso y otros actuadores electromec´anicos sin escobil-las.Adicionalmente, en la actualidad se realizan investigaciones encaminadas a desarrol-lar nuevos actuadores que disminuyan la inercia, suministren un par elevado, aumenten la precisi´on, originen menos ruido magn´etico y sean de bajo peso y consumo [8].
2.1. ANTECEDENTES 11
ellos conceptos biomec´anicos. De esta forma, se investiga en manipuladores con actu-adores tipo m´usculo, tanto para el brazo como para la mano del robot [2, 3, 4, 9].
2.1.4.
Sensores y sistemas de control
Los sistemas de control de robots pueden considerarse funcionalmente descompuestos seg´un una estructura jer´arquica. En el nivel inferior se realizan las tareas de servocontrol y supervisi´on de las articulaciones. La mayor parte de los robots industriales actuales emplean servomecanismos convencionales con retroalimentaci´on de posici´on y velocidad para generar se˜nales de control sobre los actuadores de las articulaciones. El problema se amplia al aumentar la velocidad. Como resultado en la mayor parte de los robots industriales actuales, la velocidad de operaci´on debe ser peque˜na.
Para mejorar las prestaciones se investiga una t´ecnica para identificar modelos sufi-cientemente fiables de la din´amica del robot y en m´etodos de control de articulaciones que permitan compensar las no linealidades y acoplamientos, y optimizar el compor-tamiento din´amico [5]. Asimismo, se trabaja en nuevos m´etodos de control adaptativo, que permiten tener en cuenta los cambios en condiciones de trabajo [6, 7], y en m´etodos de control por aprendizaje para mejorar progresivamente la respuesta en operaciones repetitivas, t´ıpicas en robots industriales.
El segundo nivel de control se ocupa de la generaci´on de trayectorias, entendiendo por tal la evoluci´on del ´organo terminal cuando se desplaza de una posici´on a otra. El gene-rador de trayectorias debe suministrara a los servomecanismos las referencias apropiadas para conseguir la evoluci´on deseada del ´organo terminal a partir de la especificaci´on del movimiento deseado en el espacio de la tarea. Para obtener las referencias que correspon-den a las articulaciones en un determinado punto en el espacio de trabajo, es necesario resolver el modelo geom´etrico inverso que no es lineal.
Los niveles superiores se ocupan de la comunicaci´on con el usuario, interpretaci´on de los programas, percepci´on sensorial y planificaci´on.
Los primeros robots industriales eran programados por guiado manual, almacenando la secuencia de posiciones en memoria digital. La interacci´on con la tarea se limitaba a la apertura o cierre de una pieza u ´organo terminal, indic´andolo a un equipo externo, o esperando una se˜nal sincronizada. Las aplicaciones t´ıpicas eran de “pick and place” tales como la carga y descarga de m´aquinas, realizando tareas con movimientos absolutamente definidos y fijos. Es decir, se primaba la repetibilidad sobre la adaptaci´on. En cualquier caso, los robots podr´ıan ser programados para la realizaci´on de otras tareas.
mano, que pod´ıa ser programado para realizar tareas tales como la localizaci´on, agarre, transporte y descarga de peque˜nas piezas en cajas. Este robot, que puede ser considerado como el primero controlado mediante sensores externos, se programa mediante instruc-ciones parecidas a las de un lenguaje ensamblador, incorporando ´ordenes relativas a la informaci´on de los sensores de tacto.
Continuando con el empleo de sensores de percepci´on del entorno, puede mencionarse el importante trabajo de Roberts (1963), demostrando la posibilidad de procesar una imagen digital para obtener una descripci´on matem´atica de los objetos incluidos en la escena, expresando su posici´on y orientaci´on mediante transformaciones homog´eneas.
Wichman (1967) present´o en Stanford un equipo con c´amara de televisi´on conectada a un computador que pod´ıa, en tiempo real identificar objetos y sus posiciones.
N´otese que interesa que el programador pueda expresar los movimientos en coorde-nadas cartesianas y no en los ´angulos o desplazamientos de las articulaciones. Pieper (1968) obtuvo una soluci´on al problema aplicando resultados te´oricos de la Cinem´atica. De esta forma fue posible facilitar la programaci´on del robot utilizando llamadas sub-rutinas que realizan las transformaciones geom´etricas correspondientes. En general, la utilizaci´on de coordenadas fue un importante paso que abri´o el camino al empleo de modelos del universo para la toma de decisiones, planificaci´on y verificaci´on de tareas.
Desde el comienzo de los a˜nos setenta, se investiga en robots con sensores de visi´on, resolviendo en tiempo real problemas b´asicos de manipuladores con visi´on en color [33] y ensamblado de estructuras de bloques [34].
Se progresa tambi´en en m´etodos de c´alculo de trayectorias con generaci´on de consignas a los servos de las articulaciones y en lenguajes de programaci´on de mayor nivel que in-corporan primitivas relaciones con sensores y percepci´on del entorno y especificaci´on de movimientos en coordenadas cartesianas.
Al final de los a˜nos setenta y comienzo de los ochenta se optan lenguajes estructurados [35] con herramientas de programaci´on en tiempo real que progresivamente se introducen en los robots industriales comerciales.
Asimismo, se trabaja en lenguajes de programaci´on orientados a tareas basados en incorporaci´on de m´etodos de la Inteligencia Artificial para generaci´on autom´atica de planteles, permitiendo tambi´en coordinar la actividad de un robot en sistemas de fabri-caci´on flexible.
Por lo que respecta a la planificaci´on de caminos libres de obst´aculos, el m´etodo t´ıpico se basa en construir una estructura de datos que represente la geometr´ıa del espacio de trabajo o las restricciones existentes y, a continuaci´on, se utiliza la estructura para encontrar el camino [36, 37, 38]. No obstante, estos m´etodos son, en general, costosos desde el punto de vista computacional, lo que suele impedir su aplicaci´on en tiempo real. Existen tambi´en m´etodos que incorporan la planificaci´on de caminos en el control de bajo nivel utilizando para ello m´etodos tales como el de los campos potenciales [39].
En la pasada d´ecada, surge tambi´en el concepto de retroalimentaci´on visual en control de manipuladores, con aplicaciones al agarre de objetos en movimiento [40, 41].
plani-2.2. ESTADO DEL ARTE 13
ficaci´on [42, 43].
Conviene poner de manifiesto las importantes demandas en teor´ıa de control, sis-temas de percepci´on y aprendizaje, sissis-temas de informaci´on en tiempo real, y nuevos mecanismos que se requieren para resolver los problemas planteados por el control de estructuras articuladas y la manipulaci´on de objetos.
Se han aplicado tambi´en t´ecnicas de control tales como las basadas en redes neu-ronales [44, 45, 46], y otras estructuras de control inteligente, que est´an permitiendo resolver problemas que son de elevada complejidad con m´etodos tradicionales. En gen-eral, junto a los progresos tecnol´ogicos, se requieren desarrollos te´oricos que permitan formular una metodolog´ıa de dise˜no de estos nuevos sistemas de control, en los que se involucran bucles de retroalimentaci´on sensorial y procesos de decisi´on y aprendizaje, que son dif´ıciles de tratar con los m´etodos convencionales de la teor´ıa de control.
2.2.
Estado del arte
Tradicionalmente los robots manipuladores se basaban en el control independiente de las articulaciones. Esto supondr´ıa ver las interacciones entre las mismas como defectos del modelo o como meras perturbaciones. La idea es suponer que las ecuaciones din´amicas del robot est´an desacopladas y ver cada articulaci´on como si se tratara de un sistema din´amico, independiente de las dem´as. Este esquema funcionaba debido al efecto de las reducciones en los engranajes. Los motores ven siempre lo mismo y se pueden despreciar las variaciones en la carga, el rozamiento, y los efectos din´amicos debidos al movimiento del resto de articulaciones. Sin embargo, al mejorar las prestaciones de los robots (menos peso y m´as velocidad) y al utilizar motores de acoplamiento directo, que producen un gran par, eliminan el backslash (Reacci´on Violenta) y reducen los rozamientos, debido a esto ya no es v´alida la simplificaci´on anterior ahora hay que tener en cuenta tanto las perturbaciones externas como los efectos no lineales y de acoplamiento entre las ecuaciones din´amicas.
Para el control de los manipuladores existen diversas leyes de control, siendo el con-trol de posici´on o regulaci´on y el seguimiento de trayectoria el objeto de estudio mas empleado en la actualidad en donde se emplean estas leyes. Existen diversos trabajos de investigaci´on que tratan estas t´ecnicas de control, estos trabajos describen brevemente como han contribuido al desarrollo de las leyes de control para un robot. El tema de las t´ecnicas de control para un robot manipulador es muy basto y amplio, y en la siguiente subsecci´on se citan las investigaciones m´as significativas para robots manipuladores.
2.2.1.
Control de posici´
on
Las principales preocupaciones de un sistema de control de posici´on son compensar au-tom´aticamente los errores en el conocimiento de los par´ametros del robot manipulador y suprimir las perturbaciones que tienden a desviar al extremo final del robot de la posi-ci´on deseada para lograrlo el controlador monitorea los sensores de posiposi-ci´on y velocidad, determinando el par necesario en los actuadores [22].
Santib´a˜nez, et al. describen la evaluaci´on experimental de los tres sistemas de iden-tificaci´on para determinar los par´ametros din´amicos de un sistema de dos grados de libertad [18].
Kelly, et al. proponen un simple controlador de punto de referencia para el control de robots manipuladores [15].
Kelly, et al. presentan la regulaci´on de tarea por medio de un controlador de aprox-imaci´on diferencial para robots con juntas flexibles [13].
Alion y Ortega presentan un controlador global que es asint´oticamente estable para la regulaci´on punto a punto de robots manipuladores, con uniones flexibles que s´olo utiliza la medici´on de posici´on en el lado del motor para un robot r´ıgido [11].
Berghis y Nijmeijer proponen una soluci´on simple para el problema de la regulaci´on de posici´on en los robots r´ıgidos en la disponibilidad de las medidas de posici´on en la uni´on, el control consiste en dos partes la compensaci´on de gravitaci´on y un compensador lineal din´amico de primer orden [12].
Kelly expone el control de robots manipuladores mediante un control PD con com-pensaci´on de la gravedad, utilizando un an´alisis de estabilidad asint´otica por medio de la funci´on de Lyapunov estricta [14].
Solis, et al., muestran c´omo se altera el desempe˜no del sistema de control, cuando se aplican t´ecnicas de control dise˜nadas para robots r´ıgidos sobre aquellos que posen eslabones flexibles, para evaluar los efectos de la flexibilidad en la respuesta din´amica de un robot [20].
Mahindrakar, et al. presentan en 2005 una estrategia de control de un manipulador de dos articulaciones. El modelo tiene en cuenta las fuerzas de fricci´on en el sistema. El objetivo de control es mover el eslab´on final de una posici´on dada a un punto de destino. La metodolog´ıa consiste en dos etapas. En la primera etapa un controlador en tiempo finito es utilizado para mover el eslab´on pasivo a la posici´on deseada. En la segunda etapa, el primer eslab´on se mueve a su posici´on deseada, manteniendo el segundo eslab´on en reposo, utilizando la fricci´on como freno y sujeto a la restricci´on de que el par de acoplamiento cruzado que act´ue en la segunda articulaci´on no sea superior a la fricci´on est´atica [23].
Hern´andez, et al., ocupan del control PID cl´asico de robots r´ıgidos, se introduce un procedimiento de ajuste para la selecci´on de las ganancias de PID para garantizar la estabilidad asint´otica en un dominio que puede ser ampliado arbitrariamente [26].
2.2. ESTADO DEL ARTE 15
Investigadores de la Universidad de Pittsburgh dirigidos por Andrew Schwartz han hecho que un simio logre controlar un brazo robot de siete ejes, mediante la implantaci´on de sensores en el cerebro en la corteza motora del animal, que abarca las a´ereas que con-trolan el brazo y la mano. La investigaci´on est´a dirigida a desarrollar mejores interfaces cerebro-m´aquina (BMI) para dar a las personas con discapacidad o par´alisis una mayor movilidad [30].
Cap´ıtulo 3
Modelo cinem´
atico y din´
amico del
brazo rob´
otico
El objetivo central de este cap´ıtulo es presentar el desarrollo de los modelos matem´aticos cinem´atico directo y din´amico del brazo rob´otico desarrollado en este proyecto. Primer-amente, la cinem´atica brinda una soluci´on al problema geom´etrico auxiliado de un di-agrama de cuerpo libre que tiene como objeto el calcular la posici´on y orientaci´on del efector final del robot. En segundo lugar, la din´amica se ocupa de la relaci´on entre las fuerzas que act´uan sobre un cuerpo y el movimiento que en ´el se origina. Es importante resaltar que la determinaci´on precisa de estos modelos, permite llevar acabo un control eficaz del brazo rob´otico. Los modelos desarrollados en este cap´ıtulo son esenciales para abordar, en el capitulo 5, que es el dise˜no de las leyes de control que gobernar´an el de-splazamiento del brazo rob´otico. Como parte introductoria al an´alisis realizado, se inicia el presente cap´ıtulo con una discusi´on general de las articulaciones y estructuras b´asicas de un robot.
3.1.
Articulaciones y estructuras b´
asicas
En general un brazo rob´otico, como el que se desarrolla en este trabajo, a nivel mec´anico se conforma de articulaciones, se conoce como la morfolog´ıa del los robots, las cuales permiten la uni´on o conexi´on entre los eslabones del robot y de una estructura b´asica, la cual se determina a partir de las disposici´on que guardan los eslabones dentro del sistema.
3.1.1.
Articulaciones
Cada articulaci´on provee al robot de al menos un grado de libertad (g.d.l). El movimiento de cada articulaci´on puede ser de desplazamiento, de giro o una combi-naci´on de ambos. De este modo es posibles tener diferentes tipos de articulaciones de rotaci´on, prism´atica, cil´ındrica, planar y esf´erica o rotula. Estas articulaciones se ilustran en la figura 3.1.
ESQUEMA ARTICULACIÓN GRADOS DELIBERTAD
ROTACIÓN 1 g.d.l.
PRISMÁTICA 1 g.d.l.
CILÍNDRICA 2 g.d.l.
PLANAR 2 g.d.l.
ESFÉRICA O ROTULA
[image:28.595.189.418.71.389.2]3 g.d.l.
Figura 3.1: Articulaciones b´asicas.
La articulaci´on de rotaci´on cuentan con un solo g.d.l, consistente en una rotaci´on alrededor del eje de la articulaci´on. ´Esta articulaci´on es con frecuencia la m´as empleada y se denota con la letra R.
En la articulaci´on prism´atica, el g.d.l consiste en una traslaci´on a lo largo del eje de la articulaci´on. Este tipo de articulaci´on se denota con la letra P.
En la articulaci´on cil´ındrica existen dos g.d.l, una rotaci´on y una traslaci´on. Este tipo de articulaci´on se denota con la letra C.
La articulaci´on planar est´a caracterizada por el movimiento de desplazamiento en un plano, existiendo por lo tanto dos g.d.l.
3.1. ARTICULACIONES Y ESTRUCTURAS B ´ASICAS 19
3.1.2.
Configuraciones b´
asicas
El empleo de diferentes combinaciones de articulaciones en un robot, da lugar a diferentes configuraciones, con ciertas caracter´ısticas tanto en el dise˜no y construcci´on del robot como en su aplicaci´on. Cuando se habla de la configuraci´on de un robot, se habla de la forma f´ısica que se le ha dado al brazo del robot,en la figura 3.2 se muestran las configuraciones b´asicas.
ROBOT CARTESIANO ROBOT CILÍNDRICO ROBOT ESFÉRICO O POLAR
[image:29.595.150.476.187.422.2]ROBOT SCARA ROBOT ANGULAR
Figura 3.2: Configuraciones b´asicas de un robot.
Configuraci´on cartesiana: La configuraci´on tiene tres articulaciones prism´aticas (estructura PPP o 3D1). Esta configuraci´on es bastante usual en estructuras
indus-triales, tales como p´orticos, empleadas para el transporte de cargas voluminosas. La especificaci´on de posici´on de un punto se efect´ua mediante las coordenadas carte-sianas (x, y, z). Los valores que deben tomar las variables articulares corresponden directamente a las coordenadas que toma el extremo del brazo. Esta configuraci´on no resulta adecuada para acceder a puntos situados en espacios relativamente cer-rados y su volumen de trabajo es peque˜no cuando se compara con el que puede obtenerse con otras configuraciones.
Configuraci´on cil´ındrica: Esta configuraci´on tiene dos articulaciones prism´aticas y una de rotaci´on (2D2), 1 g.d.l o estructura RPP). La primera articulaci´on es
normalmente de rotaci´on. La posici´on se especifica de forma natural en coordenadas cil´ındricas. Esta configuraci´on puedes ser de inter´es en una celda flexible, con el
1
La letra 3D se refiere a que es un sistema de tres dimensiones
2
robot situado en el centro de la celda sirviendo a diversas m´aquinas dispuestas radialmente a su alrededor. El volumen de trabajo de esta estructura RPP (o de la PRP), suponiendo un radio de giro de 360o y un rango de desplazamiento de L,
es de una secci´on cuadrada de radio interior L y radio exterior 2L.
Configuraci´on polar o esf´erica: Est´a configuraci´on se caracteriza por dos articula-ciones de rotaci´on y una prism´atica (2 g.d.l, 1D3 o estructura RRP). En este caso
las variables articulares expresan la posici´on del extremo de la tercer articulaci´on en coordenadas polares. En un manipulador con tres enlaces de longitud L, el volumen de trabajo de esta estructura, suponiendo un radio de giro de 360o y un
rango de desplazamiento deL, es el que existe entre una esfera de radio 2Ly otra conc´entrica de radioL.
Configuraci´on escara: Similar al de configuraci´on cil´ındrica, pero el radio y la rotaci´on se obtiene por uno o dos eslabones (estructura RRP). Este brazo puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuraci´on SCARA tambi´en puede hacer un movimien-to lineal (mediante su tercera articulaci´on).
Configuraci´on angular:Esta configuraci´on es una estructura con tres articulaciones de rotaci´on (3 g.d.l o RRR). La posici´on del extremo final se especifica de forma natural en coordenadas angulares. La estructura tiene un mejor acceso a espacios cerrados y es f´acil desde el punto de vista constructivo. Es muy empleada en robots manipuladores industriales, especialmente en tareas de manipulaci´on que tengan una cierta complejidad. La configuraci´on angular es la m´as utilizada en educaci´on y actividades de investigaci´on y desarrollo.
3.2.
Modelo cinem´
atico directo
En los brazos articulados de n eslabones, como el que se muestra en la figura 3.3, tradicionalmente se coloca un marco de referencia cartesiano de tres dimensiones en cualquier lugar de la base del robot, siendo denotado indistintamente por las coordenadas [x y z]T o [x
0 y0 z0]T o [x1 y2 z3]T. Los eslabones se numeran consecutivamente
desde la base (Eslab´on 0) hasta el final (Eslab´on n). Las uniones son los puntos de contacto entre los eslabones y se numeran de tal forma que la uni´on i conecta los eslabones i ei−1.
Las posiciones articulares correspondientes a cada articulaci´on del robot, que se mide por medio de sensores colocados en los actuadores localizados generalmente justo en las articulaciones, se agrupan para prop´ositos de an´alisis en el vector de posiciones articulares q. En consecuencia, para un robot conn articulaciones, es decir, de n g.d.l.,
3
3.2. MODELO CINEM ´ATICO DIRECTO 21 Unión 1 Unión 2 Uniónn Eslabón 1 Eslabón 2 Eslabónn q2 q1 q3 qn z0 x0 y0 x= x1
x.2
[image:31.595.170.458.76.262.2]. . xm 2 6 4 3 7 5 z1 z2 z3 zn
Figura 3.3: Diagrama abstracto de un robot manipulador den g.d.l.
el vector de posiciones articulares q tendr´a n elementos:
q = q1 q2 ... qn (3.1)
Por otro lado, tambi´en resulta de gran inter´es, sobre todo desde el punto de vista pr´actico, la determinaci´on de la posici´on y orientaci´on del dispositivo terminal del robot. Dicha posici´on y orientaci´on se expresan en t´erminos del marco de referencia coordenado cartesiano (x, y, z) colocado en la base del robot, as´ı como eventualmente en t´erminos de los llamados ´angulos de Euler. Dichas coordenadas (y ´angulos) son agrupados en el vector xde posiciones cartesianas4, dondem ≤n..
x = x1 x2 ... xm (3.2)
Por ejemplo, en el escenario donde el extremo final del robot puede tomar cualquier posici´on y orientaci´on en el espacio euclidiano de dimensi´on 3, se tendr´am= 6. Por otra parte, si el movimiento del robot se realiza en un plano (dimensi´on 2) y s´olo interesa la posici´on de su extremo final, entonces m = 2. Si adem´as, se esta interesado en su orientaci´on en el plano, entonces m= 3.
Estos resultados son necesarios para la obtenci´on del modelo cinem´atico directo. El modelo cinem´atico directo de un robot, describe la relaci´on entre la posici´on articularq
4
y la posici´on de orientaci´on x del dispositivo terminal del robot. En otras palabras, el modelo cinem´atico directo de un robot es una relaci´on de la forma:
x=f(q). (3.3)
La obtenci´on del modelo cinem´atico directo x=f(q), aunque laboriosa, es met´odi-ca, y en caso de robots de escasos g.d.l. involucra sencillas expresiones trigonom´etricas. En este proyecto el robot que se modela es un brazo rob´otico r´ıgido de dos g.d.l. rotacional, el cual se muestra en la Figura 3.4(a). Para la obtenci´on delmodelo cinem´atico directo del robot bajo estudio se parte del diagrama de cuerpo libre del robot, ver figura 3.4(b).
En este trabajo trabajo se obtiene el modelo cinem´atico directo del robot para tres casos diferentes:
Considerando que el punto de inter´es es el centro masa asociado al eslab´on 1, denotado por (x1, y1).
Considerando que el centro de masa del eslab´on 2 es el punto de inter´es, denotado por (x2, y2).
Cuando se considera que el punto de inter´es es la parte terminal del segundo eslab´on denotado por (xf, yf).
1.- Caso I: Considerando que el punto de inter´es es el centro masa asociado al eslab´on 1, denotado por (x1, y1), a partir del diagrama de cuerpo libre mostrado en la
Figura 3.4(b) se obtiene el modelo cinem´atico directo del brazo rob´otico r´ıgido de dos g.d.l.
El primer paso consiste en determinar las coordenadas del centro de masa del eslab´on 1 expresadas en el planox-y.
q(t) = [q1(t) q2(t)]T (3.4)
Ahora utilizando la ley de los senos, para el centro de masa del primer eslab´on (x1, y1), se tiene:
sen(q1) =
x1
lc1
, cos(q1) = −
y1
lc1
, (3.5)
Solucionando las ecuaciones anteriores, para x1 y y1, y considerando que los
es-labones est´an ubicados en el cuarto cuadrante (x positiva y y negativa), se tiene que:
x1 = lc1 sen (q1), (3.6)
y1 = −lc1cos (q1), (3.7)
3.2. MODELO CINEM ´ATICO DIRECTO 23
UNIÓN 1
UNIÓN 2
(a) Diagrama del brazo rob´otico.
xf; yf
à á l1 q1+ l2 (q1+ q2)
à l 1 cos q 1 à l 2cos q 1 + q 2 ( )
[image:33.595.91.535.75.428.2](b) Diagrama de cuerpo libre del robot.
Figura 3.4: Brazo rob´otico de dos g.d.l. bajo estudio.
2.- Caso II: Considerando que el centro de masa del eslab´on 2 es el punto de inter´es, denotado por (x2, y2), y partiendo del diagrama de cuerpo libre mostrado en la
Figura 3.4(b), se encuentra la siguiente relaci´on para α:
π =α+π
2 +β ∴ α=π− π
2 −β = π
2 −β, (3.8)
donde β=q1+q2.
Posteriormente, aplicando la ley de los senos se puede determinar y2,, siendo una variable auxiliar, a partir de:
sen(α) =−y ,
2
lc2
∴ y2, =−lc2sen(α), (3.9)
Por trigonometr´ıa se sabe que:
sen(α) = sen(π 2 +β
)
= sen(π 2
)
cos(β)−cos(π 2
)
As´ı, sustituyendo (3.10) en (3.9) se tiene que:
y2, =−lc2cos(β) =−lc2cos (q1+q2), (3.11)
Aplicando el mismo procedimiento se puede encontrar la expresi´on para calcular x,2, obteniendose:
x,2 =lc2 sen (q1+q2), (3.12)
De tal forma, en este caso, es necesario obtener las coordenadas del punto (xm, ym),
determinas por:
xm = l1senq1, (3.13)
ym = −l1cosq1, (3.14)
Finalmente, se encuentra el modelo cinem´atico directo, de acuerdo al centro de masa del eslab´on 2, siendo determinado por:
x2 = xm+x,2 =l1 sen (q1) +lc2 sen (q1+q2), (3.15)
y2 = ym+y,2 =−l1cos (q1)−lc2cos (q1+q2), (3.16)
3.- Caso III: Para este caso se considera que el punto de inter´es es el extremo final del eslab´on 2, denotado por (xf, yf),y se parte del diagrama de cuerpo libre mostrado
en la figura 3.4(b), para obtener el modelo cinem´atico directo del brazo rob´otico de dos g.d.l. Este punto es de suma importancia, siendo este, el punto de referencia para la tarea de regulaci´on.
Aplicando un procedimiento similar al desarrollado para (x1, y1) y (x2, y2) se
ob-tiene el modelo cin´ematico directo para el punto de inter´es seleccionado. En este caso, tambi´en se emplean las ecuaciones (3.17) y (3.18) que corresponden a las coordenadas (xm, ym). De esta manera, el modelo cinem´atico directo referente al
extremo final denotado por las coordenadas (xf, yf) se determinan mediante las
siguientes relaciones:
xf = xm+l2 sen (q1+q2) = l1 sen (q1) +l2 sen (q1+q2), (3.17)
yf = ym−l2cos (q1+q2) = −l1cos (q1)−l2cos (q1+q2), (3.18)
3.3.
Modelo din´
amico
3.3. MODELO DIN ´AMICO 25
Utilizando las ecuaciones de Lagrange, la energ´ıa de un robot de n g.d.l. es la suma de sus energ´ıas cin´etica Ky potencial U :
ε (q(t),q˙(t)) =K(q(t),q˙(t)) +U(q(t)) (3.19) donde q(t) = [q1(t),· · ·qn(t))]
T
.
Dado que el lagrangiano L (q,q˙) de un robot de n g.d.l. es la diferencia entre su energ´ıa cin´etica K y su energ´ıa potencialU:
L(q(t),q˙(t)) =K(q(t),q˙(t))− U(q(t)). (3.20) Considerando que la energ´ıa potencial U se debe a fuerzas conservativas como la fuerza de la gravedad y la fuerza de un resorte, las ecuaciones de movimiento de Lagrange para manipuladores de n g.d.l., quedan dadas por:
d dt
[
∂L(q,q˙) ∂q˙
]
− ∂L(q,q˙)
∂q =τ, (3.21)
o de forma equivalente
d dt
[
∂L(q,q˙) ∂q˙i
]
− ∂L(q,q˙)
∂qi
=τi, i= 1,· · · , n (3.22)
donde τi representa la fuerzas o pares ejercido externamente para cada articulaci´on
incluy´endose las fuerzas no conservativas. Como fuerzas no conservativas se incluyen las fricciones, las de resistencia al movimiento de un objeto dentro de un fluido, y en general las que dependen del tiempo o de la velocidad. N´otese que se tendr´an tantas ecuaciones escalares din´amicas como g.d.l. tenga el robot manipulador.
El uso de las ecuaciones de Lagrange para el modelo din´amico de manipuladores se reduce a cuatro etapas.
1. C´alculo de la energ´ıa cin´etica: K(q(t),q˙(t)).
2. C´alculo de la energ´ıa potencial: U(q(t)).
3. C´alculo del lagrangiano (3.20): L(q(t)),q˙(t)).
4. Desarrollo de las ecuaciones de Lagrange (3.22).
Ahora, consid´erese el brazo rob´otico de 2 g.d.l. bajo estudio mostrado en la Figura 3.4(a). El brazo rob´otico est´a formado por dos eslabones r´ıgidos construidos de aluminio cuya longitud esl1 yl2, y masas m1 ym2 respectivamente. Las uniones 1 y 2 son de tipo
rotacional. Los desplazamientos del brazo rob´otico se realizar´an en el plano verticalx–y, ver la Figura 3.4(a). La distancia entre los ejes de giro y los centros de masa se denotan por lc1 y lc2 respectivamente. Por ´ultimo, I1 e I2 expresan los momentos de inercia de
desde la posici´on vertical hacia bajo yq2 que se mide a partir de la extensi´on del eslab´on
1 hasta el eslab´on 2, siendo ambos positivos cuando se miden en sentido contrario al movimiento de las manecillas del reloj. Entonces, el vector de posiciones articularesq(t) se define como:
q(t) = [q1(t) q2(t)]T . (3.23)
La energ´ıa cin´eticaK(q,q˙) del brazo rob´otico bajo estudio puede descomponer como la suma de dos terminos: K(q,q˙) = K1(q,q˙) +K2(q,q˙) donde K1(q,q˙) y K2(q,q˙) son
las energ´ıas cin´eticas asociadas a las masas m1 y m2 respectivamente5. A continuaci´on
se obtienen dichas expresiones.
Las coordenadas del centro de masa del eslab´on 1 expresadas en el plano x–y son:
x1 = lc1sen(q1), (3.24)
y1 = −lc1cos (q1). (3.25)
El vector velocidad v1 del centro de masa del eslab´on 1 es, en consecuencia:
v1 =
[ ˙ x1 ˙ y1 ] = [
lc1cos (q1) ˙q1
lc1 sen (q1) ˙q1
]
(3.26)
Por lo tanto, la rapidez al cuadrado vT1v1 del centro de masa resulta ser:
vTv1 = ( ˙x1 y˙1)
( ˙ x1 ˙ y1 )
= x˙21+ ˙y12
= [lc1cos (q1) ˙q1]2+ [lc1 sen (q1) ˙q1]2
= [
l2c1cos2(q1) ˙q12
]
+[
l2c1 sen2(q1) ˙q12
]
= lc21q˙21[
cos2(q
1) + sen2(q1)
]
(3.27)
y haciendo uso de la relaci´on trigonom´etrica
cos2(θ) + sen2(θ) = 1 (3.28)
Se tiene que:
vT1v1 =lc21q˙21 (3.29)
Finalmente, la energ´ıa cin´etica correspondiente al movimiento del eslab´on 1 se obtiene como:
K1(q,q˙) =
1 2m1v
T
1v1+
1 2I1q˙
2 1 =
1 2m1l
2
c1q˙12+
1 2I1q˙
2
1 (3.30)
5
La energ´ıa cin´etica se determina como la suma de: 1.- El producto de la mitad de su masa por el cuadrado de la rapidez del centro de masa, i.e., 1
2mvTv. 2.- El producto de la mitad de su momento
de inercia (referido al centro de masa) por el cuadrado de su velocidad angular (referido al centro de masa), i.e., 1
2Iq˙ 2
3.3. MODELO DIN ´AMICO 27
Por otro lado, las coordenadas del centro de masa del eslab´on 2 expresadas en el plano x-y son:
x2 = l1 sen (q1) +lc2 sen (q1+q2) (3.31)
y2 = −l1cos (q1)−lc2cos (q1+q2) (3.32)
El vector velocidad v2 del centro de masa del eslab´on 2 es en consecuencia:
v2 =
[ ˙ x2 ˙ y2 ] = [
l1cos (q1) ˙q1+lc2cos (q1+q2) ( ˙q1+ ˙q2)
l1 sen (q1) ˙q1+l2 sen (q1+q2) ( ˙q1+ ˙q2)
]
(3.33)
La rapidez al cuadrado vT2v2 del centro de masa del eslab´on 2 resulta ser:
vT2v2 = ( ˙x2 y˙2)
( ˙ x2 ˙ y2 )
= x˙22+ ˙y22
= [l1cosq1( ˙q1) +lc2cos (q1+q2) ( ˙q1+ ˙q2)]2
+ [l1 senq1( ˙q1) +lc2 sen (q1+q2) ( ˙q1+ ˙q2)]2
= l12cos2q1( ˙q1)2+ 2l1cosq1( ˙q1) (lc2cos (q1+q2) ( ˙q1+ ˙q2))
+l2c2cos2(q1+q2) ( ˙q1+ ˙q2)2+l12 sen2q1( ˙q1)2
+2l1 senq1( ˙q1) (lc2 sen (q1+q2) ( ˙q1+ ˙q2)) +lc22 sen2(q1+q2) ( ˙q1+ ˙q2)2
= l12(
˙ q12) (
cos2(q1) + sen2(q1)
)
+2l1( ˙q1) ( ˙q1+ ˙q2) (cos (q1) cos (q1 +q2) + sen (q1) sen (q1+q2))
+lc2( ˙q1+ ˙q2)2
(
cos2(q1+q2) + sen2(q1+q2)
)
(3.34)
haciendo uso de la identidad trigonom´etrica
sen (q1) sen (q1+q2) + cos (q1) cos (q1+q2) = cos (q2) (3.35)
y empleando la ecuaci´on (3.28), se sustituyen en la ecuaci´on (3.34), se obtiene la rapidez al cuadrado vT
2v2 del centro de masa del eslab´on 2:
v2Tv2 =l12q˙12+l2c2
[
˙
q12+ 2 ˙q1q˙2+ ˙q22
]
+ 2l1lc2
[
˙
q12+ ˙q1q˙2
]
cos (q2) (3.36)
De esta manera, la energ´ıa cin´etica correspondiente al movimiento del eslab´on 2 queda determinada por:
K2(q,q˙) =
1 2m2v
T
2v2+
1
2I2[ ˙q1+ ˙q2]
2
= 1 2m2l
2 1q˙12+
1 2m2l
2
c2
[
˙
q21+ 2 ˙q1q˙2+ ˙q22
]
+m2l1lc2
[
˙
q12+ ˙q1q˙2
]
cos (q2) +
1
2I2[ ˙q1+ ˙q2]
2
(3.37)
De forma similar, la energ´ıa potencial puede descomponerse como la suma de 2 partes:
U(q) = U1(q) +U2(q) donde U1(q) y U2(q) son las energ´ıas potenciales asociadas a
las masas m1 y m2 respectivamente, se tiene entonces que6:
U1(q) = −m1lc1gcos (q1) (3.38)
6
y
U2(q) =−m2l1gcos (q1)−m2lc2gcos (q1+q2). (3.39)
A continuaci´on, a partir de las ecuaciones obtenidas para las energ´ıa cin´etica y potencial del sistema, determinadas por las ecuaciones (3.30)-(3.39), se obtiene el lagrangiano:
L(q,q˙) = K(q,q˙)−U(q) =K1(q,q˙) +K2(q,q˙)− U1(q)− U2(q)
= 1 2m1l
2
c1q˙12+
1 2I1q˙
2 1 +
m2
2 l
2 1q˙12+
m2 2 l 2 c2 [ ˙
q12+ 2 ˙q1q˙2+ ˙q22
]
+m2l1lc2
[
˙
q12+ ˙q1q˙2
]
cos (q2) +
1
2I2[ ˙q1+ ˙q2]
2
+m1lc1gcos (q1) +m2l1gcos (q1) +m2lc2gcos (q1+q2)
= 1 2
[
m1lc21+m2l21
]
˙ q21 +1
2m2l
2
c2
[
˙
q12+ 2 ˙q1q˙2+ ˙q22
]
+m2l1lc2cos (q2)
[
˙
q12+ ˙q1q˙2
]
+ [m1lc1+m2l1]gcos (q1)
+m2glc2cos (q1+q2) +
1 2I1q˙
2 1 +
1
2I2[ ˙q1+ ˙q2]
2
(3.40)
Ahora, para obtener las ecuaciones de movimiento que modelan al brazo rob´otico de dos grados de libertad, se aplican las ecuaciones de Lagrange, que de acuerdo a (3.22) resultan en:
d dt
[
∂L(q,q˙) ∂q˙i
]
− ∂L(q,q˙)
∂qi
=τi, i= 1,2 (3.41)
De esta ´ultima ecuaci´on se obtienen las siguientes expresiones: Para el eslab´on 1 se tiene:
∂L
∂q˙1
= [
m1lc21+m2l21
]
˙
q1+m2lc22[ ˙q1 + ˙q2] +m2l1lc2cosq2[2 ˙q1+ ˙q2]
+I1q˙1+I2[ ˙q1 + ˙q2] (3.42)
d dt
[
∂L
∂q˙1
]
= [m1l2c1+m2l12]¨q1+m2l2c2[¨q1+ ¨q2] +m2l1lc2
(cosq2[2¨q1+ ¨q2]− sen (q2) ˙q2[2 ˙q1+ ˙q2]) +I1q¨1+I2[¨q1+ ¨q2]
= [
m1lc21+m2l21 +m2lc22+ 2m2l1lc2cosq2+I1+I2
]
¨ q1
+[
m2l2c2+m2l1lc2cos (q2) +I2
]
¨
q2−2m2l1lc2 sen (q2) ˙q1q˙2
−m2l1lc2 sen (q2) ˙q22 (3.43)
∂L
∂q1
3.3. MODELO DIN ´AMICO 29
Mientras que para el eslab´on 2:
∂L
∂q˙2
= m2lc22q˙1+m2lc22q˙2+m2l1lc2cos (q2) ˙q1+I2[ ˙q1+ ˙q2] (3.45)
d dt
[
∂L
∂q˙2
]
= m2lc22q¨1+m2lc22q¨2+m2l1lc2cos (q2) ¨q1−m2l1lc2 sen (q2) ˙q1q˙2
+I2[¨q1+ ¨q2] (3.46)
∂L
∂q2
= −m2l1lc2 sen (q2) ˙q12−m2l1lc2 sen(q2) ˙q1q˙2
−m2glc2 sen (q1+q2) (3.47)
Finalmente, sustituyendo las ecuaciones (3.42)-(3.44) y (3.45)-(3.47) en (3.41), se obtiene la din´amica que gobierna al brazo rob´otico de 2 g.d.l.
τ1 =
[
m1l2c1 +m2l21+m2lc22+ 2m2l1lc2cos (q2) +I1+I2
]
¨ q1
+[m2l2c2+m2l1lc2cos(q2) +I2]¨q2−2m2l1lc2 sen (q2) ˙q1q˙2
−m2l1lc2 sen (q2) ˙q22+ [m1lc1 +m2l1]g sen (q1)
+m2lc2g sen (q1+q2), (3.48)
y
τ2 =
[
m2l2c2+m2l1lc2cos (q2) +I2
]
¨ q1+
[
m2l2c2+I2
]
¨ q2
+m2l1lc2 sen (q2) ˙q12+m2glc2 sen (q1+q2) (3.49)
siendo τ1 y τ2, los pares que act´uan en las uniones 1 y 2 del brazo rob´otico. N´otese
que las ecuaciones din´amicas del brazo rob´otico (3.48) y (3.49) son un conjunto de dos ecuaciones diferenciales no lineales. Estas ecuaciones de movimiento toman la forma matricial siguiente:
M(q)¨q+C(q,q˙) ˙q+g(q) = τ (3.50) Se observa que la ecuaci´on (3.50) es la ecuaci´on din´amica para robots den g.d.l. Siendo esta una ecuaci´on diferencial vectorial no lineal en el estado [qTq˙T]T. DondeM(q)¨q es
llamado vector de inercia siendo un vector de n ×1, C(q,q˙) ˙q es un vector de n ×1 llamado vector de fuerzas centr´ıfugas y de Coriolisis, g(q) es un vector de n ×1 de
fuerzas o pares gravitacionales y τ es un vector de n×1 llamado el vector de fuerzas externas, siendo generalmente los pares y fuerzas aplicadas por los accionadores de las articulaciones. La ecuaci´on de movimiento (3.50) se puede reescribir en forma matricial expl´ıcita de la siguiente manera:
[ τ1 τ2 ] = [
M11(q) M12(q)
M21(q) M22(q)
] [ ¨ q1 ¨ q2 ] + [
C11(q,q˙) C12(q,q˙)
C21(q,q˙) C22(q,q˙)
] [ ˙ q1 ˙ q2 ] + [
g1(q)
g2(q)
]
Considerando (3.48) y (3.49), mediante simple inspecci´on, las relaciones que gobiernan al modelo din´amico del robot, expresado en t´erminos de las matrices M(q), C(q,q˙) y g(q), quedan expresadas como:
M11(q) = m1l2c1+m2l21+m2lc22+ 2m2l1lc2cos (q2) +I1 +I2 (3.52)
M12(q) = m2l2c2+m2l1lc2cos(q2) +I2 (3.53)
M21(q) = m2l2c2+m2l1lc2cos (q2) +I2 (3.54)
M22(q) = m2l2c2+I2 (3.55)
C11(q,q˙) = −m2l1lc2 sen (q2) ˙q2 (3.56)
C12(q,q˙) = −m2l1lc2 sen (q2) [ ˙q1+ ˙q2] (3.57)
C21(q,q˙) = m2l1lc2 sen (q2) ˙q1 (3.58)
C22(q,q˙) = 0 (3.59)
g1(q) = [m1lc1+m2l1]g sen (q1) +m2lc2g sen (q1+q2) (3.60)
g2(q) = m2lc2g sen (q1+q2) (3.61)
3.4.
Representaci´
on en variables de estado
Una variable de estado de un sistema din´amico es una se˜nal del sistema, es decir, una magnitud medible del mismo. ´Estas podr´an ser:
Lasentradas, siendo las causantes de la evoluci´on del sistema,
Lassalidas, est´as son las que interesa medir y analizar para controlar al sistema y
Lasinternas, siendo el resto de las infinitas se˜nales.
De hecho pueden definirse tantas como se deseen, ya sean reales o virtuales, puesto que se pueden inventar combinaciones entre las variables existentes mediante el uso de las diferentes operaciones matem´aticas, aunque carezcan de sentido tecnol´ogico o interpretaci´on f´ısica.
A continuaci´on, describe la representaci´on en variables de estado del robot r´ıgido partiendo de la ecuaci´on (3.51). Entonces, reolcivendo para los t´erminos de segundo orden se obtiene:
[ ¨ q1 ¨ q2 ] = [
M11(q) M12(q)
M21(q) M22(q)
]−1([
τ1
τ2
]
−
[
C11(q,q˙) C12(q,q˙)
C21(q,q˙) C22(q,q˙)
] [ ˙ q1 ˙ q2 ] − [
g1(q)
g2(q)
])
(3.62) As´ı al obtener la matriz inversa, se logra la siguiente representaci´on del sistema,
[ ¨ q1 ¨ q2 ] = 1 β [(
M22[τ1−C11q˙1−C12q˙2−g1]−M12[τ2−C21q˙1−C22q˙2−g2]
−M21[τ1−C11q˙1−C12q˙2−g1] +M11[τ2−C21q˙1−C22q˙2 −g2]
)]
(3.63)
donde:
3.4. REPRESENTACI ´ON EN VARIABLES DE ESTADO 31
Realizando un cambio de variables se obtiene:
x1 = q1 (3.65)
x2 = q˙1 (3.66)
x3 = q2 (3.67)
x4 = q˙2 (3.68)
Lo que finalmente conduce a la representaci´on en variables de estado del sistema:
˙
x1 = x2 (3.69)
˙ x2 =
M22[τ1−C11x2−C12x4−g1]−M12[τ2−C21x2−C22x4−g2]
β (3.70)
˙
x3 = x4 (3.71)
˙ x4 =
−M21[τ1−C11x2−C12x4−g1] +M11[τ2−C21x2−C22x4−g2]
β (3.72)
Entonces, redefiniendo las componentes asociadas a las matrices M(q), C(q,q˙) y g(q), en t´erminos de las nuevas variables, se obtiene:
M11 = m1l2c1+m2l21+m2l2c2+ 2m2l1lc2cos (x3) +I1+I2 (3.73)
M12 = m2l2c2+m2l1lc2cos(x3) +I2 (3.74)
M21 = m2l2c2+m2l1lc2cos (x3) +I2 (3.75)
M22 = m2l2c2+I2 (3.76)
C11 = −m2l1lc2 sen (x3)x4 (3.77)
C12 = −m2l1lc2 sen (x3) [x2+x4] (3.78)
C21 = m2l1lc2 sen (x3)x2 (3.79)
C22 = 0 (3.80)
g1 = [m1lc1+m2l1]g sen (x1) +m2lc2g sen (x1+x3) (3.81)
Cap´ıtulo 4
Robot r´ıgido de dos grados de
libertad
En este cap´ıtulo se describe el funcionamiento general del robot rob´otico de dos grados de libertad (g.d.l) empledao en este proyecto, mencionando cada una de las etapas que lo conforman. Adicionalmente, se presentan los par´ametros del brazo rob´otico utilizados para el calculo y selecci´on de los actuadores y se presenta el dise˜no del brazo rob´otico realizado con el software SolidWorksr. Tambi´en se incluye la descripci´on de cada
una de las piezas mec´anicas requeridas para el ensamble del mismo (V´ease el Ap´endice B). Posteriormente, se presenta el dise˜no electr´onico asociado a las etapas de potencia, de adquisici´on de datos y de control. Finalmente, se presenta en ensamble completo el robot r´ıgido.
4.1.
Descripci´
on general de funcionamiento
El funcionamiento del brazo rob´otico de 2 g.d.l. estudiado hasta ahora a nivel expe-rimental, requiere de tres etapas de desarrollo:
1. La etapa de susbsistemas.
2. La etapa de electr´onica
3. La etapa de adquisici´on de datos y control.
La integraci´on entre una y otra etapa se ilustra en la Figura 4.1. La etapa subsistemas la conforman a su vez dos subetapas, actuadores y dise˜no mec´anico. Para el control de esta etapa es necesario de la etapa de electr´onica, en la cual se asocian todos los componentes electr´onicos que requiere el robot r´ıgido para funcionar de manera optima. Adem´as, permite la interacci´on entre la primera y la tercera etapa, como puede ser la realizaci´on de la comunicaci´on para el envi´o y recepci´on de la informaci´on referente a los enconders y las se˜nales de dirigidas al puente H. Tambi´en, genera la alimentaci´on de voltaje a los diferentes dispositivos electr´onicos que conforman el sistema. Asimismo,
protege a los actuadores y al DSP de posibles sobrecargas (sean de voltaje ´o de corriente el´ectrica). Finalmente, la ultima etapa es la cual esta asociada a la de adquisici´on de datos y control. En esta etapa es la asociada a la programaci´on de las leyes de control que permiten ejecutar la tarea de regulaci´on (V´eanse los Cap´ıtulos 5 y ??).
CIRCUITO INTERFAZ DSP-BRAZO ROBÓTICO
DSP
COMPUTADORA CIRCUITO
ACONDICIONADOR DE SEÑAL PUENTE H
CIRCUITO FUENTE DE TENSIÓN POSITIVA
CIRCUITO PUENTE H CIRCUITO ACONDICIONADOR DE SEÑAL ENCODER
BRAZO ROBÓTICO
[image:44.595.157.450.163.424.2]ELECTRÓNICA
Figura 4.1: Diagrama general del prototipo del brazo rob´otico.
4.1.1.
Etapa 1: Subsistemas
La etapa subsistemas la integran de dos paartes:a) Actuadores yb) Dise˜no Mec´anico. El bloque actuadores corresponde a los motores de CD, los cuales dotan de movimiento a los eslabones del brazo rob´otico. Los cuales tienen integrado una caja de reducci´on con sus correspondientes encoders. Estos ´ultimos son los que verifican la posici´on de los ejes de los motores, y por ende la posici´on de los eslabones. Por otro lado, el bloque b), correspondiente al dise˜no mec´anico, es de gran importancia ya que de este depende un correcto ensamble de las piezas. Cabe decir que un buen dise˜no mec´anico permite que sea m´as f´acil la interacci´on entre las otras etapas del robot. Como ya fue mencionado, este bloque se dise˜no con la ayuda del software SolidWorksr. M´as adelante, en la secci´on 4.2,
4.2. ETAPA 1: SUBSISTEMAS 35
4.1.2.
Etapa 2: Electr´
onica
Esta etapa es la que se encarga de la protecci´on, alimentaci´on y env´ıo de informaci´on para las etapas 1 y 3, donde se realiza una adecuaci´on de se˜nal de entrada-salida. Es de suma importancia la correcta definici´on de esta etapa para lograr la interacci´on de las etapas mencionadas anteriormente, ya que de lo contrario estar´ıa en riesgo la tarjeta DSP de la etapa 3 y todo el sistema el´ectrico en general. Podemos observar en la Figura 4.1, que esta etapa se encuentra conformada por el circuito fuente de tensi´on positiva, el circuito acondicionador de se˜nales del encoder, el circuito puente H y el circuito acondicionador de se˜nales del puente H. Cada uno de estos se explican con mayor detalle en la secci´on 4.3.
4.1.3.
Etapa 3: Adquisici´
on de datos y control
La tercer y ´ultima etapa, es la etapa en la que se dise˜na la ley de control que gob-ernar´a el movimiento de los eslabones del brazo rob´otico. Como se puede apreciar en la Figura 4.1, esta etapa consta de un circuito interfaz DSP-brazo rob´otico, la tarjeta dedicada a la investigaci´on y desarrollo de prototipos DS1104 y una PC conectados bidi-reccionalmente. El prop´osito de la conexi´on bidireccional entre la tarjeta de interfaz y la tarjeta controladora, es el env´ıo y recepci´on de datos hacia la etapa de potencia, mientras que la conexi´on bidireccional entre el DSP y la PC, es de igual forma la transmisi´on de datos entre ambos dispositivos, ya que la tarjeta controladora monitorea a cada momen-to la posici´on de los eslabones y proporcionar´a esta informaci´on a la PC. Por otro lado, en base a la informaci´on que el DSP vaya recibiendo v´ıa la etapa de potencia, ser´a capaz de controlar a los actuadores en tiempo real gracias a la ley de control, que se describe en el Cap´ıtulo 5.
4.2.
Etapa 1: Subsistemas
Es preciso decir que para construir el brazo rob´otico de dos g.d.l., fue de suma importancia la correcta selecci´on de los componentes, ya que de lo contrario afectar´ıan el desempe˜no del mismo y las etapas que conforman al brazo rob´otico, y por consiguiente el control no lograr´ıa su prop´osito.
Para la selecci´on adecuada de los actuadores se realiz´o una investigaci´on, de tal ma-nera que estos cumplieran con los requerimientos de este proyecto (tanto en lo econ´omico como en lo tecnol´ogico). En apoyo a la selecci´on de los actuadores se realiz´o el dise˜no mec´anico de los eslabones con el software SolidWorksr. Con esto se precis´o el peso de
los eslabones del robot, as´ı como sus momentos de inercia asociados a la geometr´ıa y al tipo de material empleado en su construcci´on. Esto permiti´o calcular el torque requerido de los actuadores, de tal manera que se pudo seleccionar apropiadamente los motores que se emplear´ıan en la construcci´on del brazo rob´otico.
![Figura 2.1: Robot manipulador KR 1000 TITAN [27].](https://thumb-us.123doks.com/thumbv2/123dok_es/4960031.75161/19.595.234.395.74.317/figura-robot-manipulador-kr-titan.webp)