Monterrey, Nuevo León a
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
PRESENTE.-Por medio de la presente hago constar que soy autor y titular de la obra
cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución, distribución pública y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la edición y en general cualquier parte de LA OBRA son de mi entera responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad relacionada con la OBRA que cometa el suscrito frente a terceros.
Diseño e Implementación de un Controlador Adaptivo Predictivo
Modular y su Aplicación en una Estrategia Avanzada de Control
-Edición Única
Title Diseño e Implementación de un Controlador Adaptivo Predictivo Modular y su Aplicación en una Estrategia Avanzada de Control -Edición Única
Authors Joel Castillo Gómez
Affiliation ITESM-Campus Monterrey
Issue Date 2008-05-01
Item type Tesis
Rights Open Access
Downloaded 19-Jan-2017 05:37:16
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
CAMPUS MONTERREY
PROGRAMA DE GRADUADOS EN MECATRÓNICA Y
TECNOLOGÍAS DE INFORMACIÓN
DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR ADAPTATIVO
PREDICTIVO MODULAR Y SU APLICACIÓN EN UNA ESTRATEGIA
AVANZADA DE CONTROL
TESIS
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO ACADEMICO DE:
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN AUTOMATIZACIÓN
POR:
JOEL CASTILLO GÓMEZ
INSTITUTO TECNOLÓGICO DE ESTUDIOS SUPERIORES DE MONTERREY
DIVISIÓN DE MECATRÓNICA Y TECNOLOGÍAS INFORMACIÓN
PROGRAMA DE GRA DUADOS EN MECATRÓNICA Y TECNOLOGÍAS DE INFORMACIÓN
Los miembros del comité de tesis recomendamos que la presente tesis del Ing. Joel Castillo Gómez sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias con especialidad en Automatización.
Comité de tesis:
______________________________
Dr. Antonio Ramón Favela Contreras Asesor______________________________
Dr. José de Jesús Rodríguez OrtizSinodal
______________________________
M.C. Luis Rosas Cobos Sinodal_________________________________________
Dr. Joaquín Acevedo MascarúaDirector de Investigación y Posgrado Escuela de Ingeniería
DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR ADAPTATIVO
PREDICTIVO MODULAR Y SU APLICACIÓN EN UNA ESTRATEGIA
AVANZADA DE CONTROL
POR:
JOEL CASTILLO GÓMEZ
TESIS
Presentada al Programa de Graduados en Mecatrónica y
Tecnologías de Información
Este trabajo es requisito parcial para obtener el grado de Maestro
en Ciencias con especialidad en Automatización
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
DEDICATORIAS
A mis padres, Joel y Susana, en quienes siempre he encontrado
un apoyo incondicional para la realización de mis metas.
AGRADECIMIENTOS
Al Tecnológico de Monterrey y el departamento de Mectrónica y Automatización del Campus Monterrey, por permitirme estudiar mi maestría, a la par del ejercicio docente.
Al Dr. Antonio Ramón Favela Contreras, por haberme recomendado para entrar a la Maestría como asistente de Docencia. Gracias por haber aceptado trabajar como mi asesor, por su tiempo y asesoría durante el desarrollo de mi trabajo de Tesis.
A mis sinodales, el Dr. José de Jesús Rodríguez Ortiz y el M.C Luis Rosas Cobos por su tiempo, sugerencias y comentarios.
5
RESUMEN
En este trabajo de tesis se implementó un controlador adaptativo predictivo modular y reconfigurable en una plataforma tecnológica de programación. Dichas características permiten aplicar el controlador en diversos sistemas o aplicaciones de control.
La motivación de realizar este trabajo de tesis surge de la necesidad de tener sistemas de control que cada vez cumplan mejor los objetivos de control ya que los sistemas convencionales, como el PID, en ocasiones no cumplen con los estándares de calidad requeridos para las aplicaciones industriales. Además, con la teoría de control clásico avanzada y la llegada de la computadora como sistema digital surge la posibilidad de aplicar dicha teoría en sistemas discretos.
Una de estas tecnologías relativamente nuevas es el control adaptativo predictivo experto. Dicha estrategia tiene fundamento en la estrategia de control predictivo pero incorpora la adaptación en línea del controlador y el conocimiento experto del sistema en el que se aplique el controlador. En el presente trabajo se exponen los conceptos básicos de esta estrategia de control haciendo énfasis en la implementación específica que se realizó. La implementación realizada se basa en el
control adaptativo predictivo, pero se realizó una mejora al introducir el tiempo de retardo como parámetro del controlador. Aunque no se implementó el componente experto como parte del controlador, éste se desarrolló en una plataforma tecnológica que permitirá modificar el controlador en trabajos futuros.
Posteriormente se muestra la implementación del controlador y su interfaz gráfica que permite configurar el controlador para diversas aplicaciones.
Adicionalmente, se presentan al lector una serie de aplicaciones de control en simulación utilizando el controlador desarrollado mostrando algunas características importantes de su comportamiento ante la variación de los parámetros del controlador. El objetivo de estas pruebas no es mostrar que el control adaptativo predictivo experto es mejor que otras estrategias de control, pues éste tema en particular ya ha sido abordado en otros estudios de tesis, por ejemplo en [14]. Con éstas aplicaciones se valida la implementación modular y la mejora del algoritmo en su manejo del tiempo muerto. Las aplicaciones realizadas consisten en el control de un sistema de primer orden y de un sistema de fase no mínima con la estrategia de control adaptativo predictivo. También se introduce la aplicación del controlador desarrollado en una estrategia de control avanzado conocida como Cascada, permitiendo observar la ventaja de la modularidad del controlador.
7
CONTENIDO
Resumen ... 5
Contenido ... 7
Índice de Figuras ... 11
Índice de Tablas ... 15
Capítulo 1. Introducción ... 19
1.1. Introducción ...19
1.2. Justificación ...21
1.3. Objetivos ...24
1.4. Metodología ...24
1.5. Organización de la tesis ...25
Capítulo 2. Control Adaptativo Predictivo Experto ... 29
2.1. Control Predictivo ...29
2.1.1. Introducción al Control Predictivo ...29
2.1.2. Estrategia Básica de Control Predictivo ...32
2.1.3. Estrategia Extendida de Control Predictivo ...35
2.1.4. Una Solución Particular ...39
2.1.5. Introducción del retardo en el modelo AP ...40
2.1.6. Limitaciones del Control Predictivo ...43
2.2. Control Adaptativo y Predictivo ...43
2.2.1. Introducción al sistema adaptativo ...43
2.2.2. Mecanismo de Adaptación ...45
8
2.3. Control Adaptativo Predictivo Experto ... 48
2.3.1. Introducción al Control Adaptativo Predictivo Experto ... 48
2.3.2. El controlador ADEX ... 48
2.3.3. Dominios en la estrategia de control ADEX ... 50
Capítulo 3. Implementación del Control Adaptativo Predictivo ... 53
3.1. Introducción ... 53
3.2. Implementación del controlador ... 54
3.2.1. Introducción ... 54
3.2.2. Plataforma de Programación LabWindows ... 54
3.2.3. Algoritmo ... 56
3.2.4. Generación de Bibliotecas de Enlace Dinámico (DLL) ... 60
3.3. Implementación de la Interfaz de Control ... 61
3.3.1. Introducción ... 61
3.3.2. Plataforma de Programación LabVIEW ... 61
3.3.3. Interfaz del Controlador ... 64
3.3.4. Algoritmo del Controlador ... 69
3.3.5. Creación de una aplicación ... 70
3.3.6. Duplicación del controlador AP ... 72
Capítulo 4. Aplicaciones ... 75
4.1. Introducción ... 75
4.1.1. Simulación de un modelo ARX ... 75
4.1.2. Simulación para dos modelos ARX en serie ... 77
4.1.3. Metodología de experimentación y presentación de resultados... 77
4.2. Aplicación en un Sistema de Primer Orden ... 79
4.2.1. Introducción ... 79
4.2.2. Descripción del Sistema ... 79
4.2.3. Parametrización del Controlador ... 80
9
4.3. Aplicación en un Sistema de fase no mínima ...90
4.3.1. Introducción ...90
4.3.2. Descripción del Sistema ...91
4.3.3. Parametrización del Controlador ...92
4.3.4. Pruebas realizadas ...93
4.4. Aplicación de una Estrategia Avanzada de Control ...102
4.4.1. Introducción ...102
4.4.2. Estrategia de Control Cascada ...103
4.4.3. Simulación de Control Cascada con dos modelos ARX en serie ...104
4.4.4. Descripción de los procesos ...106
4.4.5. Parametrización de los controladores ...108
4.4.6. Pruebas realizadas ...111
Capítulo 5. Conclusiones y Trabajos Futuros ... 127
5.1. Conclusiones...127
5.2. Trabajos Futuros ...128
Bibliografía ... 129
Anexos ... 133
Anexo A. Programación de una interfaz de Control en LabVIEW 8.20 ...133
11
ÍNDICE DE FIGURAS
Capítulo 1:
Fig. 1.1 Diagrama de bloques de un proceso ...19
Fig. 1.2 Diagrama de bloques de un lazo de control retroalimentado ...21
Fig. 1.3 Ejemplo de una señal continua y una señal discreta ...23
Capítulo 2: Fig. 2.1 Diagrama básico del control predictivo ...29
Fig. 2.2 Respuesta al escalón unitario de un sistema de fase no mínima ...34
Fig. 2.3 Diagrama general de un sistema adaptativo ...44
Fig. 2.4 Diagrama de bloques del control adaptativo y predictivo ...44
Fig. 2.5 Diagrama de bloques de un control ADEX ...49
Fig. 2.6 Dominios del control ADEX ...50
Capítulo 3: Fig. 3.1 Entorno de programación en LabWindows/CVI versión 8.1 ...55
Fig. 3.2 Ejemplo de programación C en LabWindows/CVI versión 8.1 ...56
Fig. 3.3 Diagrama de flujo del cálculo de las matrices recursivas ...57
Fig. 3.4 Diagrama de flujo de la estrategia de control AP. Sección 1 ...59
Fig. 3.5 Diagrama de flujo de la estrategia de control AP. Sección 2 ...59
Fig. 3.6 Ejemplo de panel frontal en LabVIEW versión 8.20 ...62
Fig. 3.7 Ejemplo de diagrama de bloque en LabVIEW versión 8.20 ...63
Fig. 3.8 Ejemplo de ícono de VI con sus conectores en LabVIEW versión 8.20 ...64
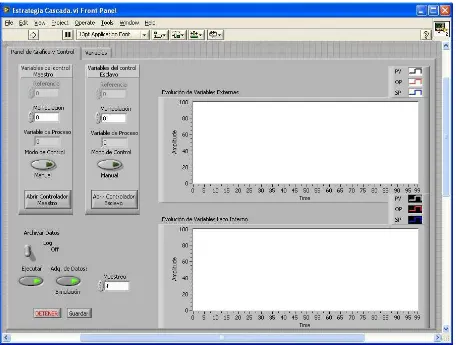
Fig. 3.9 Panel Frontal del Controlador, pestaña de monitoreo de variables. ...65
Fig. 3.10 Panel Frontal del Controlador, pestaña de configuración. ...66
Fig. 3.11 Algoritmo implementado en el diagrama de bloque de la interfaz del control ...69
Fig. 3.12 Ícono del controlador. ...70
Fig. 3.13 Terminales del controlador. ...70
Fig. 3.14 Método para reinicializar las variables a su valor inicial. ...71
12
Capítulo 4:
Fig. 4.1 Panel frontal para simulaciones de procesos ARX. ... 76
Fig. 4.2 Parámetros de simulación de proceso ARX. ... 76
Fig. 4.3 Gráfica de salida del proceso (a) y manipulación (b) del Sistema de Primer Orden ante una entrada escalón de magnitud 20. ... 80
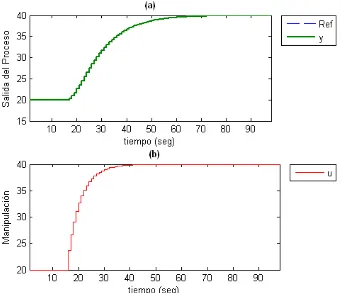
Fig. 4.4 Gráfica de salida del proceso (a) y manipulación (b) del CP en Sistema de Primer Orden sin error de modelación. ... 82
Fig. 4.5 Gráfica de salida del proceso (a) y manipulación (b) del CP en Sistema de Primer Orden con error de modelación. ... 83
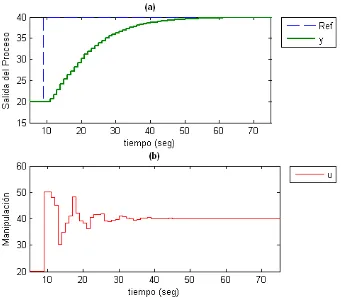
Fig. 4.6 Gráfica de salida del proceso (a) y manipulación (b) del CAP en Sistema de Primer Orden sin error de modelación. ... 84
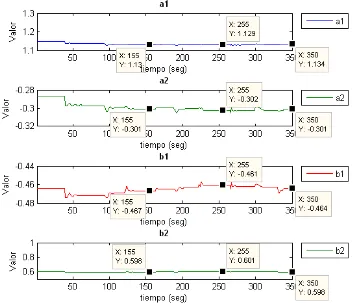
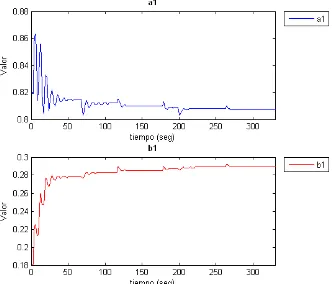
Fig. 4.7 Evolución del modelo AP del CAP en Sistema de Primer Orden sin error de modelación. ... 85
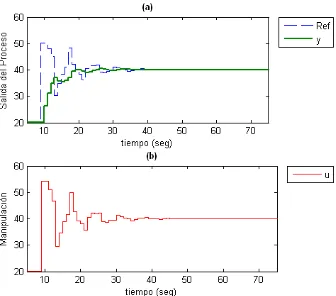
Fig. 4.8 Gráfica 1 de salida del proceso (a) y manipulación (b) del CAP en Sistema de Primer Orden con error de modelación. ... 86
Fig. 4.9 Evolución del modelo AP del CAP en Sistema de Primer Orden con error de modelación. ... 87
Fig. 4.10 Gráfica 1 de salida del proceso (a) y manipulación (b) del CAP en Sistema de Primer Orden con error de modelación, una vez adaptado. ... 87
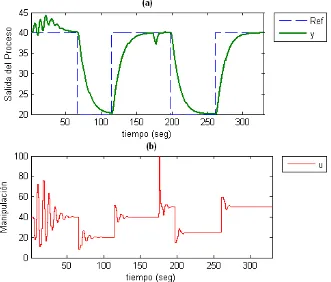
Fig. 4.11 Gráfica de salida del proceso (a) y manipulación (b) del CAP en Sistema de Primer Orden con variación en los parámetros del modelo. ... 89
Fig. 4.12 Evolución del modelo AP del CAP en Sistema de Primer Orden con variación en los parámetros del modelo. ... 89
Fig. 4.13 Gráfica de salida del proceso (a) y manipulación (b) del Sistema de Fase No Mínima ante una entrada escalón de magnitud 20 ... 91
Fig. 4.14 Gráfica de salida del proceso (a) y manipulación (b) del CP en Sistema de fase No Mínima con estrategia básica del control predictivo (λ=1) ... 93
Fig. 4.15 Gráfica de salida del proceso (a) y manipulación (b) del CP en Sistema de fase No Mínima sin error de modelación. ... 94
Fig. 4.16 Gráfica de salida del proceso (a) y manipulación (b) del CP en Sistema de Fase No Mínima con error de modelación. ... 95
Fig. 4.17 Gráfica de salida del proceso (a) y manipulación (b) del CAP en Sistema de Fase No Mínima sin error de modelación. ... 96
Fig. 4.18 Evolución del modelo AP del CAP en Sistema de Fase No Mínima sin error de modelación. ... 97
Fig. 4.19 Gráfica 1 de salida del proceso (a) y manipulación (b) del CAP en Sistema de Fase No Mínima con error de modelación. ... 98
Fig. 4.20 Evolución del modelo AP del CAP en Sistema de Fase No Mínima con error de modelación. ... 99
Fig. 4.21 Gráfica 2 de salida del proceso (a) y manipulación (b) del CAP en Sistema de Fase No Mínima con error de modelación, una vez adaptado... 99
Fig. 4.22 Gráfica de salida del proceso (a) y manipulación (b) del CAP en Sistema de Fase no mínima con variación en los parámetros del modelo. ... 101
Fig. 4.23 Evolución del modelo AP del CAP en Sistema de Fase No Mínima con variación en los parámetros del modelo. ... 101
Fig. 4.24 Diagrama de bloques de una estrategia de control cascada. ... 103
Fig. 4.25 Panel frontal para simulación de dos procesos ARX en serie. ... 104
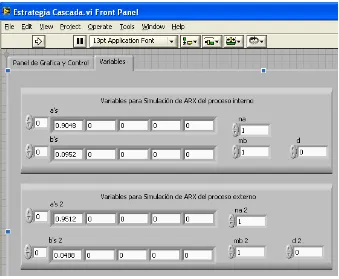
Fig. 4.26 Parámetros de simulación de los dos procesos ARX... 105
Fig. 4.27 Respuesta al escalón de magnitud 20 del proceso interno del esquema Cascada ... 107
Fig. 4.28 Salida del proceso externo consecuencia de la aplicación de un escalón de magnitud 20 al proceso interno. ... 108
13
15
ÍNDICE DE TABLAS
Capítulo 3:
Tabla 3.1 Descripción de los elementos en la interfaz del controlador ...67
Capítulo 4: Tabla 4.1 Indicadores de desempeño del CP en Sistema de Primer Orden sin error de modelación ...82
Tabla 4.2 Indicadores de desempeño del CP en Sistema de Primer Orden con error de modelación ...83
Tabla 4.3 Indicadores de desempeño del CAP en Sistema de Primer Orden sin error de modelación ...85
Tabla 4.4 Indicadores de desempeño del CAP en Sistema de Primer Orden con error de modelación ...88
Tabla 4.5 Cambios en los parámetros del sistema de primer orden. ...88
Tabla 4.6 Comparación del modelo AP contra el modelo simulado una vez estabilizado el mecanismo de adaptación. (Sistema de Primer Orden) ...90
Tabla 4.7 Indicadores de desempeño del CP en Sistema de Fase No Mínima sin error de modelación ...94
Tabla 4.8 Indicadores de desempeño del CP en Sistema de Fase No Mínima con error de modelación ....95
Tabla 4.9 Indicadores de desempeño del CAP en Sistema de Primer Orden sin error de modelación ...97
Tabla 4.10 Indicadores de desempeño del CAP en Sistema de Fase No Mínima con error de modelación ...100
Tabla 4.11 Cambios en los parámetros del sistema de fase no mínima. ...100
Tabla 4.12 Comparación del modelo AP contra el modelo simulado una vez estabilizado el mecanismo de adaptación (Fase No Mínima). ...102
Capítulo 1. Introducción
Un panorama general del enfoque de la teoría de control y la
19
CAPÍTULO 1. INTRODUCCIÓN
1.1.
Introducción
En este capítulo se presenta un panorama general de la teoría de control con el objetivo de poner al lector en el contexto de esta tesis.
Con la revolución industrial se marcó un cambio trascendental ya que el trabajo manual que realizaba el hombre fue reemplazado por lo que hoy en día conocemos como la industria, en ese entonces, la industria de la manufactura. Este cambio de paradigma, donde el trabajo ya no era realizado por el hombre, marcó la pauta para la creación de los sistemas de control.
Los diversos procesos productivos que existen en una industria son objeto de estudio y la teoría de control trata de establecer bases científicas y tecnológicas que permitan el conocimiento y aprovechamiento de dichos sistemas productivos. De manera general esto es un sistema de control.
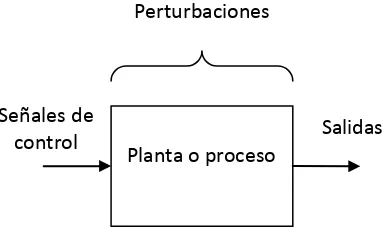
[image:21.612.223.414.512.630.2]Los sistemas de control pueden ser definidos como un conjunto de dispositivos que permiten modificar un sistema o proceso de tal forma que el hombre obtenga un beneficio al modificar el comportamiento del sistema, que es también conocido en la literatura como proceso o planta. Un diagrama de bloques típico de un proceso o planta se muestra en la Fig. 1.1.
Fig. 1.1 Diagrama de bloques de un proceso
La teoría de control enfoca el estudio de los procesos desde un punto de vista de variables físicas. Por ejemplo, el mantener la temperatura agradable en un cuarto de una casa se puede lograr a través de un aire acondicionado si se desea mantener fresca la temperatura o un sistema de
Planta o proceso Señales de
control Salidas
20
calefacción si se desea calentar. Pues bien, la teoría presente en este trabajo no se enfoca en el conocimiento de los sistemas de refrigeración o calefacción desde el punto de vista de cómo funcionan. En lugar de eso, la teoría de control se basa en estudiar el comportamiento de la temperatura, que constituye la variable de interés, para lograr que esta variable se mantenga agradable para los habitantes de la casa. Dicho esto, ahora se definirán algunos conceptos con los que se trabajará en esta tesis.
El objetivo de la teoría de control es identificar ciertas variables claves conocidas como variables de proceso o salidas del proceso, las cuales se desean mantener en un punto fijo deseado. Si volvemos al ejemplo de la temperatura de un cuarto, podremos decir con certeza que la temperatura se convierte en la salida del proceso (o variable de proceso) debido a que deseamos que la temperatura se mantenga en un punto fijo agradable para el hombre, por ejemplo 24°C. Este valor deseado se conoce como valor de referencia o consigna del sistema.
A continuación se menciona una posible categorización de las variables involucradas en un sistema de control, propuesta en [7].
Salidas: Son las variables que se desean mantener en un valor deseado.
Entradas: Son las variables que al ser modificadas, tienen un efecto sobre las variables de salida. Estas variables se pueden subdividir en:
- Señales de control: Son las variables que permiten controlar las salidas del
sistema, también conocidas como variables de manipulación. Para el ejemplo de temperatura mencionado anteriormente, una señal de control sería el flujo de aire frío que emite el aire acondicionado.
- Perturbaciones: Son las variables que modifican el comportamiento de la salida
del proceso, pero lo modifican de manera indeseable o bien el sistema de control no tiene capacidad de modificarlas. Para el ejemplo anterior, el clima del día en el que se quiera utilizar el aire acondicionado, o el hecho de que el cuarto de una habitación se mantenga cerrado y alguien lo abra, lo cual ocasionará variaciones de temperatura no deseadas.
21
1.2.
Justificación
A través de la evolución y aplicación de la teoría de control ha habido un esquema de control que se ha distinguido por su facilidad de aplicación.
Este esquema de control es conocido como control retroalimentado y surgió debido a la existencia de variables de perturbación que desvían la operación normal de un proceso y se requiere de “alguien” o “algo” (controlador) cuya función es retornar la variable de salida a la operación normal. Se conoce como retroalimentado porque la variable de salida es regresada o retroalimentada a la entrada del sistema para que el controlador tenga una forma de comparar la salida deseada con la salida real. Esto se puede apreciar en el diagrama de bloques de un sistema retroalimentado mostrado en la Fig. 1.2.
Fig. 1.2 Diagrama de bloques de un lazo de control retroalimentado
Este esquema de control ha sido por largo tiempo el más utilizado en diversas aplicaciones y dentro de este esquema de control hay un controlador específico que tiene mayor número de aplicaciones. Este controlador se conoce como Proporcional Integral Derivativo (PID). El PID ha mostrado ser un controlador realmente robusto, lo que significa que aunque muchas veces no sea bien aplicado, el controlador funciona, aunque no de manera óptima.
No se puede saber el número exacto de aplicaciones que cuentan con un controlador PID, pero en [7] se menciona que aproximadamente el 90% de las aplicaciones del control PID funcionan adecuadamente.
Sin embargo, el 10% restante de las aplicaciones no funcionan adecuadamente con el controlador PID, e incluso, muchas de las aplicaciones que actualmente cuentan con un controlador PID, no funcionan de manera óptima por algunas de las siguientes causas:
Controlador Actuador Proceso
Elemento de medición
Perturbación
Referencia Manipulación
22
Procesos no lineales: En la teoría de control, muchas de las aplicaciones, incluyendo el PID, se basan en la modelación de los procesos a través de ecuaciones matemáticas. Estas ecuaciones generalmente son ecuaciones lineales debido a la relativa facilidad de manejo en comparación con ecuaciones no lineales. Sin embargo, los procesos son en ocasiones no lineales lo que conlleva a un bajo rendimiento del controlador.
Procesos acoplados: Esto ocurre cuando un proceso es dependiente del otro. Un ejemplo sencillo de comprender es el proceso del flujo y temperatura de agua en la regadera cuando nos bañamos. Si deseamos aumentar la temperatura del agua, tendremos que abrir el agua caliente, lo que aumenta el flujo de salida de agua. Si deseamos cambiar el flujo de salida de agua, modificaremos por lo tanto la temperatura también, aunque no se desee.
Dinámica de la planta: Hay dinámicas de procesos muy complejos en los cuales los esquemas clásicos de control no han podido obtener un resultado satisfactorio.
Efecto de las perturbaciones: En ocasiones el efecto no deseado de las perturbaciones en un sistema es demasiado grande en amplitud, es decir, ocasionan una gran desviación del valor de referencia o pueden ocurrir con demasiada frecuencia.
Todas éstas y más razones han llevado a la investigación de diversas alternativas de controladores y esquemas de control.
Algunas soluciones que se han propuesto son estrategias de control avanzado que utilizan como base el control retroalimentado, pero tratan de eliminar algunas de los problemas mencionados. El desarrollo de estas estrategias fue desarrollado hace tiempo, sin embargo, el desarrollo se hizo desde el punto de vista científico o teórico y a la hora de la implementación, no había dispositivos en donde realizarlos.
Con la llegada de las computadoras, la teoría de control avanzado pudo utilizar este dispositivo para la implementación de sistemas de control capaces de mejorar los controles clásicos, como el PID.
23
Fig. 1.3 Ejemplo de una señal continua y una señal discreta
Los sistemas que manejan señales discretas, como una computadora, se conocen como sistemas discretos y manejan muestreos de señales continuas. Un muestreo es un momento en el tiempo donde se conoce el valor de la señal. Por ejemplo, en la Fig. 1.3 (b), hay seis momentos en los que conocemos el valor de la señal, por lo tanto hay 6 muestras de la señal y no existe información de la señal entre los intervalos de muestreo.
Aunque con la introducción de las computadoras, los sistemas de control pasaron a ser discretos, las señales de los procesos en los que se aplican estos controladores siguen siendo de naturaleza continua. Para hacer posible la interacción de los sistemas discretos de control con los procesos reales continuos existen convertidores de señales, conocidos como: convertidor análogo a digital (ADC por sus siglas en inglés) y convertidor digital análogo (DAC por sus siglas en inglés). Estos convertidores nos permiten introducir información a las computadoras a través de los ADC, y enviar información a los procesos a través de los DAC.
En el presente trabajo se desarrolla un controlador basado en la teoría de control discreto, con un enfoque relativamente nuevo, comparado con la teoría de control convencional. Este enfoque se basa en la teoría de control adaptativo predictivo añadiendo además un elemento experto que se basa en el conocimiento del proceso en el cual se aplique el controlador por parte del hombre.
Este controlador existe actualmente de manera comercial, sin embargo, hay gran interés de investigar el desempeño de este controlador, así como de investigar e implementar posibles mejoras que se puedan realizar con el objeto de mejorar su desempeño.
Val o r d e l a Seña l Val o r d e l a Seña l tiempo (a) tiempo (b)
24
1.3.
Objetivos
El presente trabajo de tesis tiene como objetivo la implementación de un controlador adaptativo predictivo que sea capaz de ser aplicado en diversos procesos con dinámicas distintas. Esta característica se manejará como configurable. Otra característica importante a desarrollar es la modularidad del controlador, lo que permitirá realizar estrategias de control que involucren no solo uno, sino dos o más instancias del controlador desarrollado.
Por lo tanto los objetivos puntales de este trabajo son:
Realización tecnológica de los conceptos del control adaptativo predictivo en una plataforma tecnológica de programación
Diseño de un controlador adaptativo predictivo (CAP) reconfigurable, es decir, que no sea restringido a una sola aplicación.
Que el CAP implementado sea además modular, permitiendo la duplicación del mismo así como la interacción con otros esquemas de control, incluso con otro CAP.
Mejorar el manejo del tiempo muerto en la estrategia del controlador adaptativo predictivo.
Validación del desarrollo del CAP implementando.
Ofrecer un panorama de posibles trabajos futuros, para la mejora de la CAP desarrollado.
1.4.
Metodología
Para lograr los objetivos antes planteados, se realizaron las siguientes actividades:
Investigación bibliográfica de los conceptos del control adaptativo predictivo.
Introducción del tiempo de retardo al modelo predictivo del controlador.
25
Implementación de una interfaz en una plataforma de programación gráfica (LabVIEW).
Generación de aplicaciones de control con procesos distintos para observar la reconfiguración del controlador.
Generación de una estrategia de control que utiliza dos controladores CAP para observar la opción de modularidad del controlador y las ventajas de su utilización.
Análisis de resultados y observación del comportamiento del controlador ante cambios en referencia y cambios en la dinámica de la planta.
Presentación de perspectivas de trabajos futuros sobre el CAP.
1.5.
Organización de la tesis
Este documento está organizado en 5 capítulos.
El capítulo 1 muestra un panorama general de la teoría de control así como la motivación de aplicar estrategias avanzadas de control en procesos industriales. Se presentan los objetivos de la tesis y la metodología utilizada.
En el capítulo 2 se desarrollan los conceptos básicos del control adaptativo predictivo experto, haciendo énfasis en la aplicación específica de estos conceptos en el controlador desarrollado.
En el capítulo 3 se presenta la implementación tecnológica de los conceptos cubiertos en el capítulo 2 y los algoritmos utilizados.
El capítulo 4 cubre la implementación del controlador adaptativo predictivo y su simulación en tres aplicaciones distintas. Primero se presenta una aplicación sencilla de un modelo de primer orden simulado con un control predictivo (CP) y un control adaptativo predictivo (CAP). Después se presenta un sistema de fase no mínima nuevamente con un CP y un CAP. Por último se presenta una aplicación de dos CAP aplicados en una estrategia de control.
Capítulo 2. Control
Adaptativo Predictivo Experto
29
CAPÍTULO 2. CONTROL ADAPTATIVO PREDICTIVO
EXPERTO
2.1.
Control Predictivo
En los siguientes temas se pretende dar una explicación general del enfoque de control adaptativo predictivo y las ecuaciones implementadas en este trabajo.
2.1.1. Introducción al Control Predictivo
El concepto básico del control adaptativo predictivo tiene su fundamento primordial en el control predictivo.
La idea principal del control predictivo establece que si conocemos el comportamiento de un sistema, podremos calcular la señal de control que genere un comportamiento deseado de la variable de proceso. Si se analiza este pensamiento fundamental, la idea del control predictivo es muy intuitiva y simple.
Diagrama de bloques
El siguiente diagrama de bloques es un esquema básico del control predictivo.
Fig. 2.1 Diagrama básico del control predictivo
Como se observa en la Fig. 2.1 la entrada al sistema de control sigue siendo la referencia. Sin embargo, para calcular la señal de control, hay una variable intermedia llamada salida deseada, que es la que el bloque conductor calcula. De esta forma, si se tiene la salida deseada en un instante y se conoce el comportamiento del sistema, se puede predecir la señal de control que
CONTROL PREDICTIVO Bloque conductor Modelo predictivo Proceso
30
ocasionará que la variable de proceso alcance el valor deseado. De igual forma, la salida deseada irá cambiando poco a poco de tal forma que la variable de proceso llegue al valor de referencia.
Para conocer el comportamiento de un sistema, necesitamos la existencia de un modelo matemático que represente fielmente este comportamiento, que a su vez permita calcular la señal de control. Además de este modelo (modelo predictivo), necesitamos de un bloque conductor [1].
El bloque conductor
La función de este bloque conductor, tiene fundamento en una idea muy intuitiva. Los sistemas de control clásico producen una salida ante una entrada única que generalmente es la salida deseada (referencia) [5]. Si calculamos la señal del control predictivo en base a esta única información, tendremos que la señal de control calculada será demasiado alta [1, pp. 85], con el fin de lograr que la variable de proceso alcance la referencia lo más rápido posible.
De aquí surge la idea de un bloque que conduzca la salida del proceso de una manera no brusca, sino más bien de una forma gradual hacia la referencia. En [1], se menciona la posibilidad de utilizar un modelo de referencia para hacer esta tarea. Sin embargo, utilizaremos un bloque conductor, cuya diferencia y ventaja radica en considerar la evolución de la salida actual de la variable de proceso, para calcular los valores deseados posteriores.
La salida deseada (yd) entonces, se obtiene a partir de la ecuación (2.1):
(2.1)
La ecuación (2.1) constituye una ecuación de diferencias de un modelo de referencia [3], y para diferenciarla tendremos que considerar
(2.2)
Lo expresado en (2.2) significa que los valores previos de la variable yd serán los valores leídos
31
Parámetros del bloque conductor
Una vez definido el bloque conductor, se debe proceder a decidir los diferentes parámetros involucrados en (2.1). La condición primordial en el diseño del bloque conductor es la ganancia de (2.1). Ésta deberá ser unitaria para que el valor final de yd sea igual a la referencia del sistema.
En [1] se propone utilizar un modelo de segundo orden críticamente amortiguado y con ganancia unitaria. Sin embargo, se puede implementar también de manera sencilla un modelo de primer orden con ganancia unitaria.
Para un modelo de primer orden con ganancia unitaria, el parámetro de diseño sería la rapidez deseada en la evolución de la trayectoria deseada. Esta variable es Tp en la función de transferencia (2.3), que representa un modelo de primer orden con ganancia unitaria.
(2.3)
Si se discretiza (2.3), se obtiene:
donde
,
(2.4)
Si observamos (2.4) y la comparamos con el modelo general del bloque conductor (2.2), entonces, la ecuación del bloque conductor para un modelo de primer orden sería:
(2.5)
Con la misma definición de α1 y β1 de la ecuación (2.4).
El modelo AP
Hasta ahora, se ha explicado la generación de la trayectoria deseada a través de un bloque conductor, cuya función es indicar la salida deseada en todo momento, con el propósito de alcanzar la referencia de una manera gradual y sin sobretiro.
32
Este mecanismo se introduce como modelo AP en [1] por sus siglas de adaptativo y predictivo. Por el momento, consideraremos simplemente que es el modelo de predicción del proceso que permitirá el cálculo de la señal de control.
Este mecanismo consiste en un modelo matemático que permita describir con ecuaciones el comportamiento de un proceso.
El modelo a utilizar, es un modelo de ecuación de diferencias. En [8] se mencionan modelos de ecuación de diferencias como ARMA, CARMA, ARMAX, ARIMAX, entre otros.
El modelo a utilizar en este trabajo es un modelo ARX. Este modelo se presenta en (2.6).
(2.6)
2.1.2. Estrategia Básica de Control Predictivo
A continuación se desarrollan los conceptos que permiten la implementación del control predictivo. Primero surge la estrategia básica de control predictivo cuya característica consiste en predecir el comportamiento del proceso en el siguiente tiempo de muestreo. Después se explica el por qué es necesario extender la estrategia básica debido a la existencia de procesos cuya tendencia no es predecible en una muestra subsecuente.
Ejemplo de proceso y modelo AP en el caso ideal
Considerando el sistema descrito por la Fig. 2.4 (p. 44) se puede observar que el mecanismo de adaptación modifica tanto el modelo predictivo, como el modelo adaptativo.
Ambos sistemas, adaptativo y predictivo, comparten un mismo modelo, al cual se conoce con el nombre de modelo adaptativo predictivo (AP).
Considerando un ejemplo específico, en el que el sistema o proceso es representado por la siguiente función de transferencia en z:
(2.7)
33
(2.8)
Una de las funciones del modelo AP es estimar la salida del proceso, para compararla con la salida real. Esto se puede hacer de dos maneras distintas, con la información del tiempo de muestreo anterior (a priori), o con la información del tiempo de muestreo actual (a posteriori).
A priori:
(2.9)
A posteriori:
(2.10)
De igual forma, el modelo AP sirve para calcular la manipulación necesaria para llevar la variable de proceso al valor deseado, es decir, al establecido por el bloque conductor. Para esto, es necesario calcular no y(k) sino y(k+1) e igualarla con el valor deseado de Y (del bloque conductor). De esto, se obtiene que la ley de control es:
(2.11)
Esto se conoce como la estrategia básica del control predictivo, donde se cumple con la función de calcular el valor deseado por el bloque conductor (2.1) y, con esta información, el modelo AP se utiliza para calcular la ley de control (2.11).
Necesidad de extensión de la estrategia básica
La ley de control descrita en (2.11), se basa en un modelo ideal de respuesta de un proceso. Sin embargo, en procesos reales, que es para lo que debe estar diseñada la estrategia de control descrita, hay respuestas en las cuales, el uso de la estrategia básica de control predictivo tiene resultados no solo no satisfactorios, sino, que conducen a la inestabilidad del proceso.
Estos sistemas pueden ser representados por sistemas de fase no mínima. En [5], se menciona la existencia de este tipo de sistemas, cuya principal característica es que al inicio de la respuesta del sistema, éste responde en dirección opuesta a la entrada.
34
(2.12)
Utilizando MATLAB para generar la respuesta a un escalón unitario, se obtiene la Fig. 2.2.
Fig. 2.2 Respuesta al escalón unitario de un sistema de fase no mínima
Como se observa en la Fig. 2.2, al inicio, efectivamente la respuesta empieza en dirección contraria a la entrada, que es un escalón unitario.
Si aplicamos la estrategia básica de control predictivo, el bloque conductor, ante una entrada positiva de cambio en referencia, calculará una salida deseada positiva. Como el modelo describe el comportamiento mostrado en la Fig. 2.2, para obtener una respuesta positiva en el siguiente instante de muestreo, el modelo AP calculará una salida de control negativa, cuando sabemos que al final de cuentas necesitamos una salida de control positiva. Esto se ilustra con un ejemplo en [1, pp. 98] y en el capítulo 4 en la Fig. 4.14 (página 93).
35
2.1.3. Estrategia Extendida de Control Predictivo
La diferencia principal de la estrategia extendida de control predictivo, es que no se hace la predicción en un solo instante futuro, sino en un horizonte de predicción [1], sin embargo, se sigue satisfaciendo el hecho de calcular la manipulación actual, que es el principio del control predictivo.
La estrategia extendida
Cuando se presentó la estrategia básica, cuando se genera la trayectoria deseada, no se considera la dinámica o el comportamiento del proceso. Es decir, se define una trayectoria deseada en base a algún comportamiento que se desee en la salida, pero no toma en cuenta la forma en la que se pueda seguir esa trayectoria, como se observa en el caso de un sistema de fase no mínima.
Esta información (del modelo AP) puede ser utilizada para predecir el comportamiento en un intervalo de muestras sucesivo (futuro), al cual se le conoce como horizonte de predicción. Éste está definido por el rango de [k, k+ ], donde representa el horizonte de predicción. Este parámetro es un parámetro fundamental en el desempeño del controlador. El objetivo de esta tesis no es encontrar el mejor horizonte de predicción para cada aplicación. En [14] se analizan los efectos de la elección de diferentes horizontes de predicción.
Con la introducción del horizonte de predicción ahora se va a predecir la salida del proceso no solo una muestra adelante, sino tantas como el horizonte de predicción. No podemos hacer esta predicción sin conocer las manipulaciones posteriores, esto es, se deben elegir manipulaciones “ficticias”. Esto se hace a través de la elección de un cierto criterio de rendimiento.
Predicción extendida
Así, para el intervalo [k,k+ ], se define el modelo predictivo, pero se aumenta el número de instantes futuros de predicción en la forma:
36
Criterio de rendimiento
Una vez definido el horizonte de predicción, y las predicciones de acuerdo a la ecuación (2.13), lo que necesitamos es generar las acciones de control ficticias, que sean acotadas físicamente y que a su vez logren que el bloque conductor lleve de la manera deseada la salida del proceso hacia el valor de referencia.
Para esto, necesitamos algún criterio de minimización de una función objetivo. Para aclarar el concepto se propone:
(2.14)
La ecuación (2.14) es la función objetivo que se propone para minimizar y encontrar la manipulación, donde es una trayectoria de referencia que puede generarse a través de un modelo de referencia, que es donde podemos definir, de forma independiente del proceso, la dinámica deseada, como el tiempo de respuesta, el sobretiro, es decir el comportamiento deseado. Además, Q y R son factores de peso o de diseño de la función objetivo.
Para continuar con el proceso, hay que resolver la función de objetivo a través de un problema de minimización donde las variables a encontrar son las manipulaciones, tanto la actual como las “ficticias” que minimizan la función objetivo, la cual minimizará el error entre la trayectoria proyectada en el horizonte de predicción y una trayectoria de referencia deseada por el diseñador.
Minimización de la función objetivo
Una vez presentada la función objetivo, por ejemplo, la presentada en (2.14), hay que minimizar esta función para obtener la manipulación necesaria, es decir, la ley de control o señal de control. Una de las desventajas de esta solución, es que hay que obtener la solución para todas las manipulaciones en el horizonte de predicción, y en realidad se aplica solamente la manipulación actual u(k).
En [1] se propone, que utilizando recursividad, la ecuación de diferencias de la salida estimada (2.13), es decir, del modelo AP se pueda reescribir como:
37
Donde el autor define:
(2.16)
Con
(2.17)
Esto, debido a que, si observamos la notación de la ecuación (2.15), la estimación de y, en una muestra k+j, depende de términos de y’s conocidos y u’s conocidas en las dos primeras sumatorias. Únicamente el tercer término depende de manipulaciones desconocidas, que es la que permitirá minimizar la función de objetivo.
Teniendo estas definiciones en cuenta, la ecuación (2.13), se puede escribir de forma matricial de la siguiente manera:
(2.18)
donde:
, , ,
38
E, G y G0 son las siguientes matrices:
(2.19)
(2.20)
(2.21)
Sustituyendo (2.18) en la función objetivo (2.14) y derivando para obtener el mínimo, se obtiene la solución. Ver [1, pp 112] para el procedimiento.
(2.22)
El problema con esta solución es la cantidad de recursos utilizados en el cálculo de la ley de control. La complejidad introducida por la función objetivo se debe al número de incógnitas , que son los valores de la señal de control en el horizonte de predicción. Además de la complejidad que involucra el cálculo de inversión de matrices dentro de (2.22).
Además, el vector U de esta ecuación, contiene todas las manipulaciones ficticias que satisfacen la minimización de la función objetivo, aún y cuando sólo aplicaremos la manipulación en el instante de muestreo actual. Si además, manejamos un sistema adaptativo, como se verá posteriormente, se tiene que volver a calcular en cada tiempo de muestreo las matrices (2.19), (2.20) y (2.21), además de la solución (2.22).
39
2.1.4. Una Solución Particular
Como se menciona en la sección anterior, el propósito de esta solución particular es, primero, reducir el número de de incógnitas a través de mantener constante la manipulación a lo largo del horizonte de predicción. Esto es, prácticamente, obtener la repuesta del modelo AP ante una entrada escalón de magnitud u(k), con lo cual el número de incógnitas se reduce a una sola, que es la manipulación o señal de control.
Entonces, considerando los factores de peso en la función objetivo (2.14) como:
(2.23)
Con esta elección, la función objetivo se reduce a:
(2.24)
Además, debemos mantener la manipulación o señal de control u(k) constante a través de todo el horizonte de predicción, de la siguiente forma:
(2.25)
Con esta condición, si la introducimos en (2.15), obtendremos la siguiente ecuación, que describe el comportamiento de la salida predicha del sistema por el modelo AP:
(2.26)
donde
(2.27)
Si sustituimos (2.26) en (2.24), e igualamos Jk=0, esto es, minimizando la función objetivo,
podremos despejar u(k) y obtener la ley de control:
40
Donde yrrepresenta la salida deseada, producida por el bloque de control. Si se analiza (2.28), se
puede observar que el cálculo de la señal de control en realidad es muy sencillo en comparación a la solución general obtenida en (2.22).
Necesidad de incluir tiempo de retardo en el modelo AP
En [1] no se menciona de manera explícita la introducción de tiempo de retardo para el cálculo de la señal de control. Sin embargo, varios sistemas, al ser representados a través de un modelo ARX, requieren la introducción de un tiempo de retardo para una mejor y más simple modelación.
La primera solución lógica, es aumentar el número de b’s del modelo AP, y considerar que los primeros coeficientes son cero. Sin embargo, esto implica calcular un mayor número de coeficientes g, los cuales resultan en ineficiencia o mala utilización de recursos.
A continuación se presenta como introducir el tiempo de retardo en el cálculo de la ley de control (2.28), o de manera más general, en el modelo AP.
2.1.5. Introducción del retardo en el modelo AP
La ecuación del modelo AP, escrita previamente en (2.6) no contiene explícitamente un parámetro de retardo a la señal de entrada en el sistema.
Si consideramos la letra “d” como un número entero de retrasos de la señal de entrada, en este caso “u”, entonces “d” sería el número de muestras que tarda en reaccionar la salida “y” ante un cambio en la entrada del sistema. La ecuación que expresa este comportamiento es muy similar a (2.6), pero involucra el parámetro mencionado de retardo:
(2.29)
De igual manera, la predicción extendida definida en (2.13) se reescribe como:
(2.30)
41
(2.31)
Utilizando la definición de la recursividad presentada en (2.15), podemos reescribir la ecuación del modelo AP (2.26) incluyendo el retardo:
(2.32)
Donde hλ fue definido en la ecuación (2.27) como una suma de términos “g”.
Si observamos la ecuación (2.32) y tratamos de obtener la ley de control, despejando el término u(k – d), obtendremos la misma solución previa, expresada en (2.28). El problema es que el término u(k – d) representa la manipulación “d” muestras anteriores del muestreo actual, para que se cumpla la salida deseada. Esto es irrealizable, ya que tendríamos que regresar el tiempo “d” muestras para aplicar la manipulación. Es bien sabido que solo podremos manipular en la muestra actual, por lo que hay que hacer una modificación para obtener dicha manipulación.
De manera intuitiva podemos pensar en aumentar el horizonte de predicción λ, sin embargo la ecuación (2.32) es una expresión para cualquier horizonte de predicción, e independientemente de su valor, siempre quedará el término u(k – d) a despejar de la ecuación.
Sin embargo, si reescribimos la ecuación (2.32), en la forma general, donde todos los términos son sumatorias, similar a la ecuación (2.15), pero incluyendo el tiempo de retardo, obtenemos:
(2.33)
42
(2.34)
Si observamos la ecuación (2.40), podemos separar la sumatoria en dos segmentos, el primer segmento con valores previos de la señal de control y el segundo segmento con valores desconocidos de la señal de control, éste segmento se ha resaltado en negritas en la ecuación (2.40). Es decir, como la sumatoria va incrementando debido al término “+ i”, hay un momento en el que los valores empiezan a ser desconocidos. Lo que hay que hacer es dividir la sumatoria en 2 sumatorias. Si observamos la ecuación anterior, podemos generalizar que si el horizonte de predicción es mayor que el tiempo de retardo, esto es: λ > d obtendremos un término de la sumatoria que contenga u(k|k). Específicamente esto ocurre cuando i=d.
Por lo tanto podremos reescribir el tercer término de la ecuación (2.33) como:
(2.35)
Si con esta modificación reescribimos la ecuación (2.33), obtendremos la predicción del modelo AP con el retardo incluido y además, lista para despejar la señal de control aplicable en el muestreo en el que se realice el cálculo.
(2.36)
De igual forma que la definición (2.25), sabemos que el último término se deberá mantener constante a lo largo del horizonte de predicción, por lo que se reemplazará con u(k|k), y despejando este término tenemos la ley de control con el modelo AP con retardo a la entrada.
(2.37)
43
(2.38)
La ecuación (2.37) es la que se utilizó en la implementación del controlador que se describe en el capítulo 3.
2.1.6. Limitaciones del Control Predictivo
El sistema de control descrito anteriormente, tiene una limitación muy importante. Para comprender esta limitación hay que entender el entorno de aplicación de este sistema: la industria. En general, se sabe que en este tipo de entornos, se presentan efectos no deseados sobre la variable de proceso. Estos efectos no deseados provienen generalmente de fuentes desconocidas que se conocen como perturbaciones.
El efecto de estas perturbaciones en un sistema de control, tiene dos variaciones, siendo la primera variación la desviación que ocasiona dicha perturbación de la variable de proceso de su comportamiento normal, es decir, que se desvíe de la referencia. El segundo efecto, es que cambie la relación causa efecto del sistema, en otras palabras, que el comportamiento del sistema cambie. Si el comportamiento cambia, entonces, es lógico inferir que el modelo del sistema que representa dicho comportamiento debe ser ajustado para seguir obteniendo un buen desempeño.
De esta situación surge la necesidad de obtener un ajuste del modelo de predicción cuando la relación causa efecto del sistema es modificada. Esto se logra a través de un mecanismo de adaptación.
2.2.
Control Adaptativo y Predictivo
2.2.1. Introducción al sistema adaptativo
Como se comentó en la sección anterior, el control predictivo tiene una limitante muy importante, que es la necesidad de un modelo exacto para su funcionamiento adecuado. Incluso si el modelo es exacto, muchas aplicaciones industriales tienden a cambiar conforme pasa el tiempo, principalmente debido al desgaste de los elementos de control.
44
Fig. 2.3 Diagrama general de un sistema adaptativo
Como se observa en la Fig. 2.3, el sistema de adaptación se basa en la comparación de la salida real del proceso con la salida del modelo. Esta comparación genera un error, y en base a este error, se deberán ajustar los parámetros del modelo, de tal forma que el error de dicho modelo tienda a ser cero en un determinado tiempo, eliminando así el problema del cambio del modelo en el transcurso del tiempo.
El método general de este tipo de adaptación se representa a través de la siguiente ecuación de ajuste de los parámetros del modelo.
(2.39)
La ecuación (2.39) representa un ajuste del parámetro ai, que depende de su valor previo más un
ajuste que depende el error de modelación. En los siguientes apartados se presentará cual es el mecanismo de adaptación y su diagrama de bloques en la estrategia de control adaptativo predictivo.
Diagrama de bloques
El diagrama de bloques del control adaptativo predictivo se muestra en la Fig. 2.4:
Fig. 2.4 Diagrama de bloques del control adaptativo y predictivo
45
La función general de cada bloque se explica a continuación:
Bloque conductor:
Se encarga de generar la trayectoria apropiada, que a su vez, dependiendo del error de predicción, cambia en cada instante de muestreo.
Modelo predictivo:
Es el que realiza la ley de control, para llevar el proceso al valor deseado que calcula el bloque conductor.
Mecanismo de adaptación:
En base al error, modifica el modelo de predicción del proceso.
El mecanismo de adaptación utilizado en la estrategia de control adaptativo y predictivo se muestra a continuación.
2.2.2. Mecanismo de Adaptación
La adaptación del modelo AP es necesaria ya que en casos reales de aplicaciones industriales es difícil contar con el modelo exacto del sistema e incluso éste puede variar con el paso del tiempo.
Debido a esta problemática se han diseñado sistemas de control adaptativo que permiten ajustar los parámetros del modelo una vez que el sistema de control está operando con el fin de contar con información actualizada de las características dinámicas del proceso.
Para poder aplicar el mecanismo de adaptación es necesario definir el tipo de modelo con el cual se estará trabajando tanto para el proceso como para la salida predicha, en este caso se utiliza el modelo AP en ecuación de diferencias (2.6) cuya expresión en notación vectorial es:
(2.40)
donde
(2.41)
46
(2.42)
donde
(2.43)
La diferencia entre los parámetros reales del proceso (2.43) y los del modelo (2.41) está dada por la siguiente expresión, denominado vector de error de identificación paramétrica:
(2.44)
La estrategia define el error de estimación a posteriori e(k|k) para realizar los ajustes del modelo AP. El error de estimación a posteriori se define como:
(2.45)
Si sustituimos (2.40) y (2.42) en (2.45), entonces el error a posteriori estaría expresado de la siguiente manera:
(2.46)
En [1], se propone el siguiente algoritmo recursivo para el ajuste de los parámetros del modelo AP, que cumple con los esquemas generales de adaptación, mostrado en (2.39):
(2.47)
B es una matriz definida positiva. Este mecanismo de adaptación converge a ciertos valores de θ, que hacen que el mecanismo sea estable [1, pp. 166]
47
Para romper esta relación, se utiliza la relación entre el error a priori y posteriori. El error a priori se define como:
(2.48)
Restando (2.48) a (2.46), obtenemos:
(2.49)
A partir de (2.49) y (2.47) se puede escribir:
(2.50)
La ecuación (2.50) muestra la relación entre el error a priori y el error a posteriori permitiendo reescribir la ecuación (2.47):
(2.51)
El mecanismo de adaptación puede reescribirse como:
(2.52)
Donde G(k) se conoce como el vector de ganancia variable:
(2.53)
Éste es el mecanismo de adaptación utilizado en este trabajo, con la definición de B como una matriz identidad.
Hay que mencionar que el mecanismo de adaptación descrito anteriormente, no tiene como objetivo identificar el proceso sobre el cual se está aplicando el control adaptativo predictivo. El objetivo es tratar de igualar la dinámica del proceso, de forma que se asegure que siempre se llegue al valor de referencia ysp. Esta característica se pondrá en evidencia en el capítulo 4,
48
2.2.3. Limitaciones del Control Adaptativo Predictivo
La principal limitación del control adaptativo predictivo se presenta cuando la relación causa-efecto, representada por el modelo AP, se pierde en la dinámica del proceso, debido a condiciones de saturación de algunas variables del proceso o por fallas del mismo.
La gran desventaja es, que cuando se pierde esta relación, el mecanismo de adaptación comenzará a hacer que los parámetros o pesos de modelación del sistema tiendan a cero, ya que la relación causa-efecto no es válida en ese momento, pero esto pasa sólo en algunos puntos o en ciertos momentos, lo cual conlleva a la pérdida del aprendizaje realizado mientras la operación del proceso era normal.
Debido a esto, en ADEX [2] se propone incorporar una parte experta al control AP. Esta parte experta incorpora dominios de aplicación de control adaptativo y predictivo, y dominios expertos, donde el conocimiento del proceso por parte de expertos es fundamental.
2.3.
Control Adaptativo Predictivo Experto
2.3.1. Introducción al Control Adaptativo Predictivo Experto
Debido a la limitación del control adaptativo predictivo, surge la necesidad de incorporar un elemento experto al sistema de control. ADEX incorpora este elemento experto.
El control experto consiste en la incorporación de dominios de operación. Un dominio, en los controladores ADEX, es un rango del proceso donde puede estar activo solamente un tipo de control. En general hay dos tipos de dominios en los controladores ADEX: el dominio experto (EX) y el dominio de control adaptativo y predictivo (AP). El dominio experto es donde el control AP ve deteriorado su desempeño, por lo tanto se eligen acciones de control de contingencia o acciones predeterminadas por el experto en el proceso. Además, existe la posibilidad de tener varios dominios, tanto expertos (EX) como adaptativo y predictivos (AP).
2.3.2. El controlador ADEX
49
Diagrama de bloques
El diagrama de bloques básico de un sistema con control ADEX se muestra a continuación:
Fig. 2.5 Diagrama de bloques de un control ADEX
Bloque de control:
El bloque experto determina qué tipo de control hay que aplicar, por ejemplo, si entramos en un dominio EX, determina la manipulación a asignar en ese dominio, dependiendo de si el bloque experto le dice que efectivamente, se encuentra en un dominio experto.
Bloque conductor:
El bloque conductor puede ser modificado ya que pueden existir varios dominios AP, por lo que la trayectoria deseada del sistema puede variar dependiendo del dominio de trabajo.
Mecanismo de adaptación:
Este es uno de los bloques más importantes en su interacción con el bloque experto, ya que cuando se entra en un dominio EX, es recomendable detener la adaptación de la dinámica del proceso para retomarla cuando se entre nuevamente en el dominio AP.
Salida del proceso
Referencia Salida
50
2.3.3. Dominios en la estrategia de control ADEX
El control de la plataforma ADEX tiene varios dominios de trabajo en los cuales trabajan sus controladores y permite entender el enfoque de un sistema experto trabajando en paralelo con un control adaptativo y predictivo.
DOMINIO EXPERTO (EX-S)
(AP-S)
DOMINIO ADAPTATIVO PREDICTIVO (AP-C)
(AP-I)
(EX-I)
Fig. 2.6 Dominios del control ADEX
En la Fig. 2.6 se muestran los diferentes dominios del control ADEX. Básicamente, consta de dos dominios expertos, uno inferior (EX-I) y uno superior (EX-S). Además tiene tres dominios AP, uno inferior (AP-I), uno central (AP-C) y uno superior (AP-S).
En qué dominio de control se encuentre el controlador ADEX, depende de la definición de ciertos parámetros en el controlador ADEX que permiten al bloque experto determinar cuál de los dominios de control deberá estar activo.
Aunque en el presente trabajo no se crean los mismos dominios de control ADEX, se generó un controlador adaptativo predictivo que puede ser fácilmente deshabilitado, sin perder información del control, así como se puede deshabilitar la adaptación. Esto permitirá generar en trabajos futuros un sistema experto con varios controladores y varios dominios de trabajo.
Capítulo 3. Implementación del
Control Adaptativo
Predictivo
53
CAPÍTULO 3. IMPLEMENTACIÓN DEL CONTROL
ADAPTATIVO PREDICTIVO
3.1.
Introducción
En el presente capítulo se describe la forma en la que se implementó el controlador adaptativo predictivo (CAP). La implementación consta de un controlador adaptativo y predictivo SISO (single input single output por sus siglas en inglés).
El código base del controlador fue desarrollado en la plataforma de programación LabWindows versión 8.1 y su desarrollo se presenta en la sección 3.2 de este trabajo.
De igual forma, se implementó una interfaz gráfica de usuario en la plataforma de programación LabVIEW versión 8.20 y su desarrollo se presenta en la sección 3.3. Ambas plataformas de programación de la compañía National Instruments.
La justificación del por qué utilizar ambas plataformas se presenta en dichos capítulos.
En resumen lo realizado consta de la implementación de un controlador adaptativo predictivo con las siguientes características:
Bloque conductor genérico: El bloque conductor se creó con un modelo de ecuación de diferencias basado en (2.1) y (2.2) con p=5 y q=5.
50 muestras como el horizonte de predicción máximo.
Asignación manual por el usuario de los parámetros α y β con opción a calcularse de manera automática a través de un modelo de primer orden basado en (2.3) y (2.4).
Implementación del modelo AP en base a una ecuación de diferencias ARX, como el presentado en (2.29), con un máximo de n=5, m=5 y un tiempo de retardo máximo de 20 muestras.
Implementación de la ley de control obtenida a partir de la solución particular (2.37) con el tiempo de retardo como parámetro del modelo AP.
Implementación del mecanismo de adaptación descrito en (2.52), con opción a ser deshabilitado.
54
trabaja en modo manual, gracias a la flexibilidad de LabVIEW como plataforma de programación se puede generar un algoritmo experto que ignore la acción de control generada por el controlador, con la opción de deshabilitar la adaptación como se planteó en el punto anterior.
Las características comentadas anteriormente permiten que el controlador diseñado sea aplicable a varios procesos a través de la plataforma LabVIEW tal como se podrá apreciar en el capítulo 4.
3.2.
Implementación del controlador
3.2.1. Introducción
En este capítulo se presenta de manera general la implementación realizada del controlador adaptivo y predictivo en la plataforma de programación LabWindows.
La principal ventaja de utilizar un paquete computacional para programar el algoritmo del controlador adaptativo y predictivo es la flexibilidad que ofrece este tipo de ambiente de programación.
La computadora es, por naturaleza, un sistema discreto o digital. Por lo tanto, la implementación de este controlador con motivos de experimentación es viable, factible y poco costoso si se compara con otras formas de implementación de controladores digitales, por ejemplo microcontroladores, por mencionar una alternativa.
Se decidió utilizar LabWindows como software de programación del algoritmo debido a sus funciones de depuración y facilidad de uso [10]. Además, LabWindows utiliza programación basada en texto que permite ejecutar instrucciones de manera secuencial y ordenada.
3.2.2. Plataforma de Programación LabWindows
LabWindows/CVI (CVI es acrónimo de código “C” para la Instrumentación Virtual por sus siglas en inglés) es un software de programación basado en código C, y pertenece a la compañía National Instruments.
55
El compilador de LabWindows/CVI es un compilador ANSI C de 32-bits y como se mencionó anteriormente, se caracteriza por sus funciones de depuración.
Entorno de programación
La Fig. 3.1 muestra un ejemplo del entorno de programación que ofrece LabWindows.
Fig. 3.1 Entorno de programación en LabWindows/CVI versión 8.1
La Fig. 3.1 muestra una interfaz gráfica de usuario, la cual puede ser generada con cierta facilidad. LabWindows es una plataforma de programación en código C orientada a eventos. Los eventos en LabWindows corresponden a acciones generadas por el usuario al momento de ejecutar la Interfaz gráfica. Ejemplo de algunos eventos son: clics del mouse, con todas sus variantes, cambios en valores de pantalla, presionar alguna tecla del teclado, entre otros.
56
Fig. 3.2 Ejemplo de programación C en LabWindows/CVI versión 8.1
Otra característica importante de LabWindows es que permite crear bibliotecas de enlace dinámico (DLL) que son las que permitirán ejecutar el algoritmo CAP en otro ambiente de programación. Más adelante se explicará lo que son las bibliotecas de enlace dinámico. A continuación se presentan los algoritmos implementados.
3.2.3. Algoritmo
El algoritmo que se programó en LabWindows consta básicamente de 4 funciones, 3 de las cuales son funciones que se exportan a la biblioteca de enlace dinámico, es decir pueden ser ejecutadas por otro sistema.
Las 4 funciones, divididas en funciones internas y funciones de exportación son:
Funciones internas:
o Cálculo de matrices recursivas
Funciones de exportación a DLL:
57
o Cálculo de parámetros de segundo orden
o Estrategia de Control Adaptativo y Predictivo
A continuación se explica cada una de las funciones y se presenta el algoritmo de las mismas.
Función: Cálculo de matrices recursivas
Como se expresó en el Capítulo 2, en la sección 2.1.3, la estrategia extendida de control predictivo requiere el cálculo de las matrices E (2.19), G (2.20) y G0 (2.21) para la minimización
de la función objetivo. Otra utilidad de estas matrices es utilizar la información contenida en ellas para realizar los cálculos de la señal de control en las ecuaciones (2.27) y (2.28).
Ahora bien, ¿Por qué se creó una función en lugar de ser sólo un procedimiento dentro de la función “Estrategia de Control Adaptativo y Predictivo”? La respuesta es sencilla.
Para calcular la ley de control (2.37), necesitamos el valor deseado de la referencia yr(k+λ), el
cual es el valor generado por la ecuación del bloque de control (2.1). De igual forma que reescribimos el modelo AP descrito en (2.13) y resultó (2.15), con la ayuda de la recursividad expresada en las matrices E, G y G0, podemos reescribir (2.1) utilizando la misma recursividad
que el modelo AP, para facilitar el cálculo de yr. El algoritmo implementado se muestra en la Fig.
3.3.