Diseño de un mecanismo para una mesa de vibraciones mecánicas con movimiento delimitado en el plano X,Y mediante programa CAD y CAE
100
0
0
Texto completo
(2) DISEÑO DE UN MECANISMO PARA UNA MESA DE VIBRACIONES MECANICAS CON MOVIMIENTO DELIMITADO EN EL PLANO X,Y MEDIANTE PROGRAMA CAD Y CAE. CRISTIAN DAVID PINZÓN LÓPEZ DUVÁN ESNEYDER HUERTAS LOMBANA. PROYECTO DE GRADO MODALIDAD MONOGRAFÍA REQUISITO PARA OBTENER TÍTULO DE TECNÓLOGO EN MECÁNICA. ASESOR: ING. VICTOR ELBERTO RUIZ ROSAS. BOGOTA D.C UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA.
(3) CONTENIDO. Página. RESUMEN ...................................................................................................................... 1 INTRODUCCION .......................................................................................................... 2 CAPÍTULO 1: PROBLEMÁTICA ............................................................................... 3 1.1. PLANTEAMIENTO DEL PROBLEMA .............................................. 3. 1.2. OBJETIVOS.............................................................................................4. 1.3. 1.2.1. Objetivo general .................................................. 4. 1.2.2. Objetivos específicos .......................................... 4. JUSTIFICACIÓN ................................................................................... 5. CAPÍTULO 2: MARCO TEÓRICO Y DE ANTECEDENTES ............................... 6 2.1. MARCO TEÓRICO ............................................................................... 6 2.1.1. ¿Qué es una vibración mecánica? ....................................................... 6. 2.1.2. Clasificación de las vibraciones mecánicas ........................................ 6. 2.1.3. Parámetros de una vibración ............................................................... 6. 2.1.4. ¿Qué es el análisis de vibraciones mecánicas? ................................... 7. 2.1.5. ¿Cuál es la importancia del análisis de las vibraciones mecánicas? ...7. 2.1.6. ¿Cómo se realiza el análisis de vibraciones mecánicas? .....................7. 2.1.7. Medición de las vibraciones ................................................................ 8. 2.1.8. ¿Cómo interpretar los resultados? ...................................................... 8. 2.1.9. Fallas que se pueden detectar con un análisis de vibración ................ 9.
(4) 2.2. ANÁLISIS DE ANTECEDENTES ..................................................9 2.2.1. ¿Qué es una vibración? ........................................................... 9. 2.2.2. El origen de estudio de las vibraciones ................................... 9. 2.2.3. Soluciones tradicionales al análisis de vibraciones ................ 11 2.2.3.1 Banco de pruebas por desbalanceo de rotores ................ 11 2.2.3.2 Tecnología clave MBC ................................................... 12 2.2.3.3 Banco de ensayo de rodamientos para vibraciones......... 13. 2.2.4. 2.3. Alternativas usadas para vibraciones ..................................... 13 2.2.4.1. Biela manivela ..............................................14. 2.2.4.2. Mecanismo polea correa o slider ...................14. 2.2.4.3. Mecanismo husillo y guías .......................... 15. 2.2.4.4. Actuador hidráulico ......................................15. 2.2.4.5. Actuador neumático ..................................... 16. 2.2.4.6. Motor lineal .................................................. 17. ANÁLISIS DE MÁQUINAS ........................................................... 18 2.3.1. El análisis de vibraciones en empresas especializadas ...........18. 2.3.2. Bancos de prueba de vibraciones mecánicas.......................... 21. 2.3.3. Elementos de vibración .......................................................... 25. CAPÍTULO 3: DESARROLLO DEL PROYECTO ................................................ 34 3.1. DETERMINACIÓN DE PARAMETROS .................................... 34 3.1.1. Análisis de movimiento lineal en dos ejes ........................... 35. 3.1.2. Análisis de movimiento circular ........................................... 38. 3.1.3. Análisis de movimiento combinado .................................... 43.
(5) 3.2. 3.3. PLANTEAMIENTO Y SELECCIÓN ................................................. 47 3.2.1. Diseño 1 ...................................................................................... 47. 3.2.2. Diseño 2 ...................................................................................... 51. 3.2.3. Diseño 3 ...................................................................................... 55. 3.2.4. Elección diseño final .................................................................. 58. ANÁLISIS CAE .................................................................................... 60 3.3.1. Selección de materiales .............................................................. 61. 3.3.2. Análisis de elementos estáticos .................................................. 66. 3.3.3.. 3.3.2.1.. Base de montaje 1.............................................. 66. 3.3.2.2.. Tapa base 1 ........................................................ 69. 3.3.2.3.. Base de montaje 2.............................................. 69. 3.3.2.4.. Tapa base 2 ........................................................ 70. 3.3.2.5.. Encaje del eslabón guía...................................... 70. 3.3.2.6.. Soporte de pared 1 ............................................ 72. 3.3.2.7.. Soporte de pared 2 ............................................ 73. 3.3.2.8.. Base de montaje 3............................................. 75. Análisis de elementos dinámicos ..............................................77 3.3.3.1.. Pinza deslizante base 1 ..................................... 79. 3.3.3.2.. Eslabón guía..................................................... 80. 3.3.3.3.. Encaje rotacional del eslabón guía................... 81. 3.3.3.4.. Eslabón 1 ........................................................ 82. 3.3.3.5.. Eslabón 2 ........................................................ 83. 3.3.3.6.. Eslabón 3 ........................................................ 84. 3.3.3.7.. Palanca de giro ...............................................85.
(6) 3.3.3.8.. Eslabón palanca de giro ..................................... 86. 3.4. ANÁLISIS DE RESULTADOS .................................................................... 87 CONCLUSIONES Y RECOMENDACIONES ......................................................... 88 BIBLIOGRAFÍA .......................................................................................................... 89.
(7) INDICE DE ILUSTRACIONES. Página. Ilustración 2.1 Plano frontal del módulo para medir vibraciones por desbalanceo de rotores en voladizo........................................................................... 12 Ilustración 2.2 Detector para mantenimiento ............................................................12 Ilustración 2.3 Montajes propuestos para la detección de fallas en los rodamientos, B1 motor vertical y carga descentrada, B2 motor horizontal y carga radial y axial a través de cilindros neumáticos ..................13 Ilustración 2.4 Mecanismo biela manivela ............................................................... 14 Ilustración 2.5 Mecanismo Slider ............................................................................. 15 Ilustración 2.6 Mecanismo husillo y guias ............................................................... 15 Ilustración 2.7 Actuador hidrahulico ........................................................................ 16 Ilustración 2.8 Actuador neumatico ...........................................................................16 Ilustración 2.9 Esquema motor lineal ....................................................................... 17 Ilustración 2.10 Equipo de prueba de vibración para circuito impreso, para módulo fotovoltaico y para celda solar ............................................................ 21 Ilustración 2.11 Equipo de prueba de vibraciones vertical y horizontal por funcionamiento electrohidráulico ...................................................................... 22 Ilustración 2.12 Equipo de prueba de vibraciones trabajando en posición horizontal ................................................................................................... 23 Ilustración 2.13 Mesa aforada del equipo de prueba de vibraciones ....................... 23 Ilustración 2.14Banco de prueba de vibraciones y fatiga para relojería .................. 24 Ilustración 2.15 Montaje del elemento para análisis ................................................. 24 Ilustración 2.16 Ubicación de los elementos de vibración (Vista lateral) ................ 26 Ilustración 2.17 Ubicación de los elementos de vibración (Vista frontal) ................ 26 Ilustración 2.18 Componentes de una mesa de vibraciones ...................................... 27 Ilustración 2.19 Esquema de variación de frecuencia para un motovibrador ............27 Ilustración 2.20 Isométrico de un motovibrador ....................................................... 28 Ilustración 2.21 Esquema y plano de los vibradores neumáticos de bola ................. 29 Ilustración 2.22 Esquema y plano de los vibradores neumáticos de rodillo ..............30 Ilustración 2.23 Esquema y plano de los vibradores neumáticos de turbina...............31 Ilustración 2.24 Esquema y plano de los vibradores neumáticos de cilindro .......... 33 Ilustración 3.1 Factores del diseño........................................................................... 34 Ilustración 3.2 Movimiento lineal en dos ejes (Esquema del eslabonamiento) ........35 Ilustración 3.3 Parámetros del movimiento lineal en dos ejes a 25 Hz .......................36 Ilustración 3.4 Parámetros del movimiento lineal en dos ejes a 50 Hz .......................37 Ilustración 3.5 Movimiento circular (Esquema del eslabonamiento) ...................... 38.
(8) Ilustración 3.6 Parámetros del movimiento circular a 20 Hz........................................ 40 Ilustración 3.7 Parámetros del movimiento circular a 25 Hz........................................ 42 Ilustración 3.8 Posiciones para el movimiento combinado ..................................... 43 Ilustración 3.9 Parámetros del movimiento combinado a 15 Hz ................................. 44 Ilustración 3.10 Movimiento combinado (Punto muerto superior) .......................... 44 Ilustración 3.11 Movimiento combinado (Punto muerto inferior) ........................... 46 Ilustración 3.12 Vista isométrica boceto 1 ............................................................... 47 Ilustración 3.13 Posiciones iniciales y sentidos de giro boceto 1 ............................ 48 Ilustración 3.14 Posiciones finales boceto 1............................................................ 49 Ilustración 3.15 Montaje de piezas boceto 1 ............................................................ 50 Ilustración 3.16 Vista isométrica boceto 2 ............................................................... 51 Ilustración 3.17 Cambios de posición boceto 2 ........................................................ 52 Ilustración 3.18 Montaje de piezas boceto 2 (Parte 1).............................................. 53 Ilustración 3.19 Montaje de piezas boceto 2 (Parte 2).............................................. 54 Ilustración 3.20 Vista isométrica boceto 3 ............................................................... 55 Ilustración 3.21 Montaje de piezas boceto 3 (Parte 1).............................................. 57 Ilustración 3.22 Montaje de piezas boceto 3 (Parte 2).............................................. 57 Ilustración 3.23 Lectura de la matriz de decisión ..................................................... 59 Ilustración 3.24 Asignación del material (Base de montaje 1) ................................. 67 Ilustración 3.25 Proceso de enmallado tetraédrico (Base de montaje 1) .................. 67 Ilustración 3.26 Ubicación de las restricciones (Base de montaje 1) ....................... 67 Ilustración 3.27 Ubicación de las cargas (Base de montaje 1) ............................... 68 Ilustración 3.28 Deformación y esfuerzos (Base de montaje 1) ............................... 68 Ilustración 3.29 Enmallado, restricción y carga (Base de montaje 2) ...................... 69 Ilustración 3.30 Deformación y esfuerzos (Base de montaje 2) ............................... 70 Ilustración 3.31 Enmallado, restricción y carga (Encaje del eslabón guía) ............. 71 Ilustración 3.32 Deformación y esfuerzos (Encaje del eslabón guía) ....................... 71 Ilustración 3.33 Enmallado, restricción y carga (Soporte de pared 1) ...................... 72 Ilustración 3.34 Deformación y esfuerzos (Soporte de pared 1) ................................ 73 Ilustración 3.35 Enmallado, restricción y carga (Soporte de pared 2)....................... 74 Ilustración 3.36 Deformación y esfuerzos (Soporte de pared 2) ................................ 74 Ilustración 3.37 Enmallado, restricción y carga (Base de montaje 3) ..................... 75 Ilustración 3.38 Deformación y esfuerzos (Base de montaje 3) .............................. 76 Ilustración 3.39 Deformación y esfuerzos bajo carga máxima ................................ 77 Ilustración 3.40 Deformación (Pinza deslizante base 1) ........................................ 79 Ilustración 3.41 Deformación y esfuerzos (Eslabón guía) ...................................... 80 Ilustración 3.42 Deformación y esfuerzos (Encaje rotacional) ............................... 81 Ilustración 3.43 Deformación y esfuerzos (Eslabón 1) ........................................... 82 Ilustración 3.44 Deformación y esfuerzos (Eslabón 2) .......................................... 83 Ilustración 3.45 Deformación y esfuerzos (Eslabón 3) .......................................... 84 Ilustración 3.46 Deformación y esfuerzos (Palanca de giro) .................................85 Ilustración 3.47 Deformación y esfuerzos (Eslabón palanca de giro) .................. 86.
(9) INDICE DE TABLAS. Página. Tabla 2.1 Elementos del montaje B2 .............................................................................. 13 Tabla 2.2 Bancos de prueba de vibraciones mecánicas (Parte 1) .................................. 20 Tabla 2.3 Bancos de prueba de vibraciones mecánicas (Parte 2) .................................. 20 Tabla 2.4 Elementos de vibración (Parte 1) ......................................................................... 25 Tabla 2.5 Elementos de vibración (Parte 2) ......................................................................... 25 Tabla 2.6 Dimensiones de los vibradores neumáticos de bola ........................................ 29 Tabla 2.7 Dimensiones de los vibradores neumáticos de rodillo .................................... 30 Tabla 2.8 Dimensiones de los vibradores neumáticos de turbina ....................................... 31 Tabla 2.9 Dimensiones de los vibradores neumáticos de cilindro ..................................33 Tabla 3.1 Frecuencias y parámetros del mecanismo ....................................................... 35 Tabla 3.2 Listado de piezas boceto 1 ..............................................................................49 Tabla 3.3 Listado de piezas boceto 2 ..............................................................................53 Tabla 3.4 Listado de piezas boceto 3 ..............................................................................56 Tabla 3.5 Matriz de decisión........................................................................................... 60 Tabla 3.6 Composición química del aluminio 2014 ...................................................... 62 Tabla 3.7 Composición química del aluminio 6061 ...................................................... 62 Tabla 3.8 Composición química del acero SAE 4340 ................................................... 63 Tabla 3.9 Peso de las piezas estáticas para tres materiales ............................................ 65 Tabla 3.10 Peso de las piezas dinámicas para tres materiales ......................................... 65 Tabla 3.11 Resumen de velocidades y aceleraciones .................................................... 78.
(10) RESUMEN. En este documento lo que el lector observará es el proceso llevado a cabo por estudiantes de tecnología mecánica de la Universidad Distrital Francisco José De Caldas con el fin de diseñar el mecanismo de generación de movimiento para un banco de pruebas para el análisis de vibraciones mecánicas, para lo cual se investigó sobre la maquinaria existente en el mercado, se establecieron los parámetros de frecuencia requeridos y se empleó software especializado para el modelado de las piezas y su posterior estudio. Los resultados del análisis indican que el mecanismo diseñado es completamente funcional al permitir un movimiento semicircular constante de la mesa de vibraciones, entregando valores de frecuencia de hasta 15 Hz sin presentar deformaciones o esfuerzos considerables sobre sus eslabones, para investigaciones o prácticas con elementos de hasta 25 Kg.. 1.
(11) INTRODUCCIÓN. En la actualidad existen diversos procesos industriales, cada uno realizado con una finalidad específica y un funcionamiento particular, sin embargo, sea cual sea el trabajo a realizar, siempre se implica el uso máquinas, sistemas compuestos por elementos en movimiento y elementos fijos, los cuales son sometidos a cargas, esfuerzos y por supuesto a frecuencias. En este proyecto se trabajará en torno al factor de la frecuencia, el cual determina los años de funcionamiento de una máquina, los planes de mantenimiento a aplicar, las implicaciones para la salud del operario, desalineaciones, fallos, etc. Teniendo esto en consideración se han creado máquinas que permiten recolectar y analizar la información de los efectos de las vibraciones sobre los elementos, piezas, productos y similares. De manera más específica en este documento se abordará una posible solución a la problemática de la falta de infraestructura para el análisis de vibraciones mecánicas en la Facultad Tecnológica de la universidad Distrital Francisco José De Caldas, para aplicativos de enseñanza y apropiación de conocimientos sobre el tema, por tal razón se evidenciará el proceso realizado para diseñar el mecanismo que genere el movimiento para una mesa de vibraciones con parámetros determinados.. 2.
(12) CAPÍTULO 1: PROBLEMÁTICA. 1.1 PLANTEAMIENTO DEL PROBLEMA En la industria actual y en un contexto general que acoja la producción, fabricación y transformación de materias primas, son generadas en el proceso situaciones que implican el efecto de las vibraciones; este factor incide en el funcionamiento de las máquinas, elementos mecánicos, estructuras y demás cuerpos sometidos a un comportamiento dinámico, por tal razón es de suma importancia reconocer y entender dichos efectos e implicaciones que tienen este tipo de oscilaciones sobre los sistemas mecánicos, tales como desgaste, desequilibrio y pérdida de energía ,entre otros aspectos, que determinan su vida útil, una oportuna acción de mantenimiento o una selección de materiales adecuados. Actualmente la Facultad Tecnológica de la Universidad Distrital Francisco José de Caldas no cuenta con ningún equipo o instrumentación que permita la experimentación, análisis e investigación de las vibraciones mecánicas y en consecuencia los conocimientos apropiados por el estudiante durante su proceso de formación tienen una alta calidad teórica, pero por otro lado una deficiencia en el contexto práctico. De acuerdo con lo anterior, desde el grupo de investigación DISING y el semillero SIMEC se ha planteado evaluar el diseño de bancos de laboratorio para vibraciones mecánicas y en particular plantear el diseño de su mecanismo de acción a partir de diferentes modelos para evaluar su viabilidad frente a exigencias y condiciones determinadas para este tipo de equipos.. 3.
(13) 1.2 OBJETIVOS. 1.2.1 OBJETIVO GENERAL. • Modelar y evaluar el sistema mecánico generador de movimiento para una mesa de vibraciones con movimiento limitado en el plano X Y.. 1.2.2 OBJETIVOS ESPECÍFICOS. • Analizar las especificaciones de diferentes mecanismos de generación de movimiento en máquinas para análisis de vibraciones mecánicas que se pueden encontrar en el mercado.. • Determinar los parámetros dinámicos requeridos de operación para una mesa de vibraciones XY para un laboratorio en la facultad tecnológica de la UD.. • Plantear alternativas de mecanismos de generación de vibraciones y seleccionar el que mejor se adecúe a las condiciones de operación definidas.. • Analizar mediante el uso de programas CAE el mecanismo y sus parámetros de carga, esfuerzo y deformación.. 4.
(14) 1.3 JUSTIFICACION. Colombia es un país con un alto potencial comercial y mercantil, sin embargo, en el contexto industrial no tiene una posición comparable con las grandes potencias como Japón o Estados Unidos, por tanto, generar conocimiento respecto al tema permite promover el proceso de innovación y crecimiento tecnológico a nivel local, mediante procesos de modelado y diseño de elementos que componen los bancos de análisis de vibraciones, la cual es una tecnología ampliamente reconocida a nivel mundial por su relevancia en el ámbito del mantenimiento predictivo. El Proyecto curricular Mecánica de la Universidad Distrital, busca formar profesionales tecnólogos e ingenieros con altos niveles de pertinencia respecto a las necesidades industriales presentes en el país. Y teniendo en cuenta el amplio uso a nivel industrial de estrategias de revisión y predicción del comportamiento de equipos sometidos a vibraciones, el mejoramiento de su infraestructura tecnológica orientada a esta área, fortalecerá los procesos de docencia e investigación, mejorando el impacto de los egresados en el medio. La metodología propuesta permitirá iniciar un proceso que será aprovechado por el grupo de investigación DISING, y el semillero SIMEC para el desarrollo tecnológico de equipos de laboratorio robustos de bajo costo comercial. por lo que es de relevancia la búsqueda de información relacionada con maquinaria en el mercado, posibles mecanismos de análisis y la comprensión mecánica de los mismos, promoviendo la exploración del tema tratado, fomentando el conocimiento y nuevas propuestas de investigación, basados en información técnica actualizada y confiable. Para los desarrolladores del proyecto de grado que buscan titularse como tecnólogos, el desarrollo del proceso analítico y conceptual supone enfrentarse a condiciones reales de adquisición de información, investigación teórica, apropiamiento de conocimiento y posterior análisis de los datos para generar un diseño, modelado y finalmente el estudio del mecanismo y su viabilidad; este procedimiento permitirá aplicar parte de los conocimientos adquiridos durante la carrera y requerirá reconocer nuevas ideas sobre la industria y su funcionamiento.. 5.
(15) CAPÍTULO 2: MARCO TEÓRICO Y DE ANTECEDENTES. 2.1 MARCO TEÓRICO Y CONCEPTUAL. 2.1.1 ¿QUÉ ES UNA VIBRACIÓN MECÁNICA? Movimiento vibratorio o vibración es la variación o cambio de configuración de un sistema en relación al tiempo, en torno a una posición de equilibrio estable, su característica fundamental es que es periódico, siendo frecuente el movimiento armónico simple, por lo que este movimiento adquiere una singular importancia en los estudios vibratorios. (Carbonell, Martínez, & Flórez, 2017). 2.1.2 CLASIFICACIÓN DE LAS VIBRACIONES MECÁNICAS Las vibraciones son libres cuando no existen fuerzas o acciones exteriores directamente aplicadas al sistema a lo largo del tiempo. Las vibraciones son forzadas cuando existen acciones o excitaciones directamente aplicadas al sistema a lo largo del tiempo, además de las fuerzas o momentos internos. Tanto las vibraciones libres como las forzadas pueden subdividirse, dependiendo de la existencia o no de fuerzas resistentes que amortiguan el movimiento vibratorio, en: ●. Sin amortiguamiento: No existe resistencia pasiva al movimiento del sistema.. ●. Con amortiguamiento: Existen resistencias pasivas al movimiento del sistema, es decir, fuerzas o momentos disipativos que amortiguan el movimiento vibracional. (Carbonell, Martínez, & Flórez, 2017). 2.1.3 PARÁMETROS DE UNA VIBRACIÓN. ●. Desplazamiento: Indica la cantidad de movimiento que la masa experimenta con respecto a su posición de reposo.. ●. Periodo: Es el tiempo que tarda la masa en realizar un ciclo completo. Frecuencia: Es el número de ciclos que ocurren en una unidad de tiempo.. ●. Velocidad: Se refiere a la proporción del cambio de posición con respecto al tiempo.. 6.
(16) ●. Aceleración: Proporciona la medida del cambio de la velocidad con respecto al tiempo.. 2.1.4 ¿QUÉ ES EL ANÁLISIS DE VIBRACIONES MECÁNICAS? Todas las máquinas generan vibraciones como parte normal de su actividad, sin embargo, cuando falla alguno de sus componentes, las características de estas vibraciones cambian, permitiendo bajo un estudio detallado identificar el lugar y el tipo de falla que se está presentando, facilitando así, su rápida reparación y mantenimiento. El análisis de vibraciones está basado en la interpretación de las señales de vibración tomando como referencia los niveles de tolerancia indicados por el fabricante o por las normas técnicas. (Olarte, Botero, & Cañón, 2010). 2.1.5 ¿CUAL ES LA IMPORTANCIA DEL ANÁLISIS DE LAS VIBRACIONES MECÁNICAS? Independientemente de los planes de mantenimiento correctivo y preventivo, el plan de mantenimiento predictivo se basa, principalmente, en el estudio de las vibraciones mediante la instalación de sensores que permiten detectar vibraciones fuera de rango. En general, se suponen vibraciones de pequeña amplitud porque fuera de ellas dejan de tener validez la mayoría de las hipótesis que se establecen para su estudio. (Olarte, Botero, & Cañón, 2010). 2.1.6 ¿CÓMO SE REALIZA EL ANÁLISIS DE VIBRACIONES MECÁNICAS? Debido a que las máquinas están formadas por múltiples piezas que trabajan en conjunto para lograr determinado objetivo, las vibraciones presentes en éstas, no son más que la suma de todas las señales de vibración provenientes de cada una de sus partes. Debido a la complejidad que presentan las señales de las vibraciones, muchas veces, es necesario convertirlas en señales más sencillas para facilitar su análisis e interpretación. Esto se consigue transformando la señal al dominio de la frecuencia a través de la Transformada Rápida de Fourier (FFT), la cual captura la señal en el tiempo, la transforma en una serie de señales sinusoidales y finalmente las conduce al dominio de la frecuencia. (Olarte, Botero, & Cañón, 2010). 7.
(17) 2.1.7 MEDICIÓN DE LAS VIBRACIONES Debido a que la conversión de una señal de vibración en un espectro de frecuencias requiere de un manejo matemático un poco complicado, en las industrias modernas, cuentan con instrumentos especializados que miden las vibraciones entregando los espectros de frecuencia y la magnitud de sus parámetros. Los instrumentos analizadores de vibración capturan las señales por medio de sensores. Estos sensores se colocan directamente sobre la máquina en aquellos puntos que son susceptibles a fallas. La toma de medidas debe ejecutarse manteniendo iguales las condiciones de operación de la máquina, la ubicación de los sensores y el tiempo entre una medición y otra con el fin de que los datos obtenidos se puedan comparar entre sí. (Olarte, Botero, & Cañón, 2010) 2.1.8 ¿CÓMO INTERPRETAR LOS RESULTADOS? Con los datos obtenidos de las mediciones, se realiza su interpretación usando técnicas de análisis que permitan conocer el estado de la máquina. Las técnicas básicas que más se utilizan, son: Análisis de Frecuencia: Este análisis se hace en base al espectro obtenido de la señal de vibración. El espectro está conformado por una gráfica cuyo eje horizontal corresponde a la frecuencia y el eje vertical a cualquiera de los siguientes parámetros: desplazamiento, velocidad o aceleración. Análisis de Tiempo: Este análisis es un complemento al análisis de frecuencia puesto que sirve para confirmar diagnósticos en aquellas fallas que poseen espectros muy parecidos, estos problemas pueden ser, el desbalance, el desalineamiento y la holgura. (Olarte, Botero, & Cañón, 2010) 2.1.9 FALLAS QUE SE PUEDEN DETECTAR CON UN ANÁLISIS DE VIBRACIÓN ● ● ● ● ●. Desbalanceo Desalineamiento Defecto de rodamientos Ejes torcidos Desajuste mecánico. 8.
(18) 2.2 ANALISIS DE ANTECEDENTES. A continuación se desarrollara un modelo de acuerdo a la problemática presentada anteriormente, por ende se definió que el criterio de periodo a estudiar esta entre el año 2005 hasta la fecha, este se divide en dos partes fundamentales que son estudios a nivel internacional y nivel nacional, cada uno de estos se presentara primero con su recopilación de fuentes y como último con el acceso definido/detallado de estas fuentes con un orden cronológico de cada investigación mencionada en el paso anterior. Para empezar a definir los orígenes, evoluciones etc. de las maquinas vibratorias primero tenemos que saber que son básicamente, por lo tanto:. 2.2.1 ¿QUE ES UNA VIBRACION? Los sistemas de ingeniería que poseen masa y elasticidad están capacitados para tener movimiento relativo. Si el movimiento de estos sistemas se repite después de un determinado intervalo de tiempo, el movimiento se conoce como vibración, la vibración es, en general, una forma de energía disipada y en muchos casos un inconveniente. Esto es particularmente cierto en maquinaria; debido a las vibraciones, se producen ruidos, se arruinan las diferentes partes y se transmiten fuerzas y movimientos indeseables a los objetos muy cercanos. (Seto, 1970). 2.2.2 EL ORIGEN DE ESTUDIO DE LAS VIBRACIONES Una de las opciones para estudiar la evolución del campo de la ingeniería de las vibraciones mecánicas es a través de la lectura de las biografías de las personas que efectuaron aportaciones significativas. Por supuesto que en dichas aportaciones no sólo deben contemplarse los avances en la comprensión de las vibraciones, sino que deben considerarse los desarrollos en cuanto a metodología y a matemáticas necesarias para establecer el marco que sistematice los conocimientos. (Estrucplan, s.f) Este enfoque permite ir armando en nuestros cerebros el complejo rompecabezas que representa la evolución del conocimiento humano en cualquier área. Circunstancias culturales relacionadas con la fecha y lugar de nacimiento, educación, guerras, plagas, etc. van creando las condiciones para que cada paso se dé. (Estrucplan, s.f) En este texto se presenta una posible lectura de dicha historia clasificando la evolución de las vibraciones en etapas y dando una lista de personas que han efectuado desarrollos y dejados registros de sus trabajos en cada una de ellas. (Estrucplan, s.f) Es posible agrupar, en un primer periodo que denominaremos "orígenes", a los acontecimientos y a las personas que sentaron las bases conceptuales del campo de las 9.
(19) vibraciones. Este periodo va desde la antigüedad hasta el Renacimiento, esto es, aproximadamente desde el año 3000 A.C. hasta el 1500 de nuestra era. (Estrucplan, s.f) ● Pitágoras de Samos (ca. 570 – 497 A.C) el aporte fue Frecuencia Natural, Física Experimental; Teoría de números, Vibración de Cuerdas Tensas. ● Heródoto (ca. 484 -425 A.C) el aporte fue Reporta un Transductor de Vibración ● Euclides (350 – 275 A.C) el aporte fue Péndulo Usado como Medidor Vibraciones. Un segundo periodo a considerar es el que va del renacimiento hasta mediados del siglo XIX, que llamaremos de "formalización". (Estrucplan, s.f) En esta época se da un gran desarrollo matemático y conceptual que consolida el cuerpo teórico de las vibraciones, así como progresos en la instrumentación. (Estrucplan, s.f) ● ● ● ●. Galileo Galilei (1564 – 1612) con la medición de la Frecuencia de Péndulos. Marinus Mersenne (1588 – 1648) con cuerdas Vibrantes Joseph Sauveur (1653 – 1716) con armónicos en Vibraciones Daniel Bernoulli (1700 – 1782) con hidrodinámica, Ecuación Diferencial de Vibración Lateral en Vigas ● Jean le Rond D’ Alembert (1717 – 1783) con Ecuación de Onda ● Sophie Germain (1776 – 1831) con vibración de Placas ● Claude Louis Maria Henry Navier (1785 – 1836) con vibración de Sólidos. El factor determinante de la consolidación del enfoque ingenieril en las vibraciones fue el desarrollo de la maquinaria de alta velocidad, que se desarrolló por la presión ejercida por la industrialización. (Estrucplan, s.f) Esta etapa comprendida desde aproximadamente 1850 a 1950 la denominaremos de "aplicaciones". (Estrucplan, s.f) En este dinámico periodo se desarrollan los conceptos y aplicaciones ingenieriles requeridas por maquinaria como: locomotoras, autos y aviones, que comprende desde las máquinas de vapor hasta la turbina. Por supuesto que lo antes mencionado implica el desarrollo de métodos de análisis y diseño modernos, y también la publicación de los libros, de texto y consulta, que permitieron la difusión de esta área del conocimiento. (Estrucplan, s.f) ● Edward John Routh (1831 – 1907) con sistemas de Varios Grados de Libertad 10.
(20) ● John William Strutt, Lord Rayleigh (1842-1919) con métodos de Energía, Primer Tratado de Vibraciones ● Henry Poincaré (1854 – 1912) con vibración No Lineal ● Stephen P. Timoshenko (1878 – 1972) con libros sobre Mecánica y Vibraciones ● Hort con primer Libro de Ingeniería de las Vibraciones ● J.P. Den Hartog con libro sobre Vibraciones. 2.2.3 SOLUCIONES TRADICIONALES AL ANALISIS DE VIBRACIONES Actualmente en la industria se presentan varias maneras de analizar vibraciones dentro de un equipo mecánico a continuación se presentarán las dos más usadas actualmente. 2.2.3.1 Banco de pruebas para el estudio de las vibraciones generadas por desbalanceo de rotores en voladizo El desbalanceo mecánico es uno de los problemas de vibración más frecuentes en máquinas rotativas, siendo éste perjudicial para el tiempo de servicio o vida útil del equipo. Una de las maneras de detectar la presencia del fenómeno vibratorio es a través de señales de frecuencia, las cuales tomadas con ayuda de un analizador de vibraciones muestra la magnitud predominante en condición de desbalanceo. (Goaiberica, s.f.) Por un lado, el desbalanceo Se define como la condición en la que el eje de inercia del rotor no coincide con su eje de rotación, provocando que el giro no sea concéntrico y produciéndose, por lo tanto, fuerzas o momentos dinámicos que producen vibraciones. (Goaiberica, s.f.) En la ilustración 1.1 se muestra el plano frontal del módulo para medir vibraciones por desbalanceo de rotores en voladizo.. 11.
(21) desbalanceoderotoresenvoladizo.Fuente:Goaiberica. 2.2.3.2 Tecnología clave MBC (mantenimiento basado en la condición) Esta tecnología sirve para determinar el estado de cada uno de los componentes de los equipos con el fin de programar las actividades de mantenimiento respectivas, sin afectar al desarrollo normal de la planta de producción. (Peral, Campillo, & Velasco, 2008) La utilización de esta tecnología aporta información valiosa en el diagnóstico prematuro de fallas en los elementos rodantes, engranajes, bombas, compresores, vent iladores y otras máquinas rotativas. (Peral, Campillo, & Velasco, 2008) Las fallas que se pueden detectar en las máquinas por medio de sus vibraciones son las siguientes: ▪ ▪ ▪ ▪ ▪ ▪ ▪ ▪. Desbalanceo. Desalineamiento. Defecto de rodamientos. Ejes torcidos. Desajuste mecánico. Defectos en transmisiones. Defectos de engranajes. Problemas eléctricos.. Ilustración 2.2 detector para mantenimiento. Fuente: (Peral, Campillo, & Velasco, 2008). 12.
(22) 2.2.3.3 Banco de ensayo de rodamientos para vibraciones Para la identificación de rodamientos dañados, se propusieron dos montajes con características diferentes. La propuesta inicial cuenta con un motor en posición vertical B, conectado a un variador de frecuencia A que permite alterar el régimen de funcionamiento del mismo. El motor arrastra un rodamiento fijado por una pieza especialmente diseñada para este fin, C. Para que el sistema no funcione sin carga, se emplea una masa de 5 kg, D, apoyada sobre la barra de sujeción. La presencia de una carga descentrada genera un desequilibrio muy importante en el sistema, lo que dificulta la identificación del fallo en el rodamiento en el espectro de frecuencia. Por este motivo se ideó un segundo sistema con el motor situado en posición horizontal y cargado con cilindros neumáticos tanto en dirección radial como axial. (Naranjo, 2013). Ilustración 2.3 Montajes propuestos para la detección de fallos en los rodamientos. B1 motor vertical y carga descentrada, B2 motor horizontal y carga radial y axial a través de cilindros neumáticos. Fuente: (Naranjo, 2013). Tabla 2.1 Elementos del montaje B2.Fuente: (Naranjo, 2013). 2.2.4 ALTERNATIVAS USADAS PARA VIBRACIONES Actualmente en la industria se han modelado varios diseños innovadores que tienen en común oscilaciones dentro de un plano x, y es decir en 2D, a continuación, se mostraran brevemente los más relevantes.. 13.
(23) 2.2.4.1 Biela Manivela Es un sistema de soportes para el conjunto, rodamientos lineales para proporcionar el desplazamiento de la plataforma en una dirección y el sistema biela-manivela, que está formado por un disco con ranura que permite variar la amplitud de movimiento y una manivela que conecta el disco y la plataforma. La biela se conecta al motor, que le imprime el movimiento de rotación (ilustración 1.4). Además, el sistema cuenta con un controlador que se encarga de poner en funcionamiento el motor y permite variar la velocidad de rotación y controlar la frecuencia. (Morales, 2017). Ilustración 2.4 mecanismo biela manivela. Fuente: (Morales, 2017). 2.2.4.2 Mecanismo polea correa o slider El slider o carril motorizado se utiliza, por ejemplo, en el desplazamiento del cabezal de la impresora. Este se compone de un carril que fija la dirección y puede ser de aluminio para proporcionar precisión y suavidad en el movimiento. Al carril se le acopla el carro, que cumple con la función del desplazador de la mesa o plataforma. Se diseña el carro para permitir el movimiento longitudinal de la correa, de forma que esta se encuentre totalmente tensada y se mueva suavemente. Para ello hace falta una polea dentada, otra polea idéntica o un cojinete que permita el desplazamiento en el otro extremo. Necesita un tensor y la correa de transmisión que encaje perfectamente con la polea dentada y además sea de un material bastante rígido para evitar holguras por la elasticidad del material, siendo interesante el uso del poliuretano u otro plástico reforzado [Ref. Web 3]. Para controlar el sistema se acopla el motor a la polea dentada. El motor lleva un soporte que hay que diseñar de un material suficientemente rígido: aluminio, plástico u otro. (Morales, 2017). 14.
(24) Ilustración 2.5 Mecanismo slider. Fuente:(Morales, 2017). 2.2.4.3 Mecanismo husillo y guías El mecanismo se compone del husillo que gira sobre sí mismo por la acción del motor, unido a este mediante un acoplamiento. Unido al husillo se diseña un desplazador que produce el movimiento de la plataforma. Esta se desplaza solidaria a las guías o rodamientos lineales, que permite un movimiento suave en dicha dirección. Se diseña también el soporte del motor respecto de la base y el soporte del husillo, posicionándolo en el extremo contrario al motor, todo ello de aluminio que facilita el mecanizado. Se acopla una rueda moleteada en el extremo del husillo, para permitir el movimiento manual del mismo y sirviendo de retención del movimiento axial, que a su vez es absorbido por los rodamientos colocados en el husillo. (Morales, 2017). Ilustración 2.6 Mecanismo husillo y guías. Fuente:(Morales, 2017). 2.2.4.4 Actuador hidráulico Se monta la plataforma sobre un sistema de rodamientos lineales de baja fricción, que permiten el desplazamiento en la dirección de excitación. El movimiento se produce por la acción del actuador. El sistema hidráulico cuenta con una servo-válvula para controlar los cambios de sentido y el movimiento del actuador hidráulico. Para seleccionar este último, se determina la fuerza máxima que debe ejercer, a través de la carga total de la mesa y la masa puesta sobre ella, máxima aceleración del conjunto y teniendo en cuenta capacidad de carga de los rodamientos seleccionados. Por último, el servo-controlador. 15.
(25) transmite la señal enviada del ordenador a los puertos del actuador en la servo-válvula. (Morales, 2017). Ilustración 2.7 Actuador hidráulico. Fuente:(Morales, 2017). 2.2.4.5 Actuador neumático El movimiento de una mesa vibratoria neumática se genera por medio de actuadores (cilindros y válvulas), alimentados por un compresor. El desplazamiento, velocidad y aceleración son controlados por señales eléctricas en una electroválvula. Estas son recibidas desde un controlador, el cual toma acciones en función de la orden dada. Para sostener y permitir el desplazamiento de la mesa, se incorporan unos soportes y rodamientos lineales, igual que en caso de actuador hidráulico. Pero ahora se compone de un sistema neumático, formado por un compresor de aire que proporciona el flujo de aire necesario, con su filtro y regulador de aire, una válvula que proporciona la de presión, con una servo válvula o electroválvula, un servo-controlador para la adquisición de datos, control y comunicación con la electroválvula y el actuador neumático Para dimensionar adecuadamente el actuador, hay que calcular la fuerza que este debe transmitir a la mesa. (Morales, 2017). Ilustración 2.8 Actuador neumático. Fuente: (Morales, 2017). 16.
(26) 2.2.4.6 Motor lineal El movimiento del motor lineal es controlado por un driver que requiere para su funcionamiento, una señal de referencia SP (señal que indica el movimiento: sismo, armónico o barrido en frecuencia) y una señal de realimentación, proveniente del encoder lineal que mide la velocidad y desplazamiento de la mesa vibratoria. La señal de referencia es generada por un ordenador y enviada en forma de voltaje a través de la tarjeta de adquisición y control de datos hacia el servo-controlador. Este sistema se compone de los rodamientos que deben soportar las cargas y realizar los desplazamientos, con baja fricción y altas velocidades. Se incorpora el encoder lineal y el motor lineal siendo los síncronos de imán permanente (PMLSM) los más utilizados por alcanzar altas aceleraciones y además no requieren de elementos de transmisión como cajas reductoras, cadenas o tornillos de acople para convertir el movimiento de rotación en traslación. Esto evita la fricción y las limitaciones mecánicas en aceleración y velocidad. Además, el servo controlador que sea capaz de entregar al motor las corrientes nominales y de pico que va a consumir durante su movimiento. Y el ordenador o dispositivo que genere la señal para producir el movimiento. (Morales, 2017). Ilustración 2.9 Esquema motor lineal. Fuente: (Morales, 2017). 17.
(27) 2.3 ANÁLISIS DE MÁQUINAS 2.3.1 El análisis de vibraciones en empresas especializadas Al realizar una exploración de los distintos bancos de prueba para el análisis de vibraciones mecánicas que se encuentran disponibles en el mercado, es posible encontrar una gran variedad de equipos, los cuales se caracterizan por tener diferentes funcionamientos y rasgos particulares para procesos y análisis específicos. En primera instancia, los bancos de prueba definen sus características en función de los sistemas o procesos que deben ser analizados y en los cuales la máquina puede funcionar de manera óptima, es decir que para definir las características del mecanismo que genera el movimiento, se debe definir necesariamente la capacidad a la que puede trabajar el banco. La capacidad del banco de pruebas estará definida entonces por la carga del elemento que se desea analizar y/o las frecuencias bajo las que se debe someter dicho elemento para su posterior análisis. Como fuentes de información se tomaron en cuenta varias empresas que producen y comercializan una gran variedad de elementos y máquinas de ensayo, tal es el caso de los bancos de prueba de vibraciones mecánicas, mesas de vibración y elementos vibrantes; las compañías mencionadas son mostradas a continuación:. •. Ai Si Li (China) Test Equipment Co., Ltd.. Creado en 1988, Ai Si Li (China) Test Equipment Co., Ltd. se especializa en la fabricación de una variedad de instrumentos de inspección de calidad, prueba de equipos y otros productos de alta tecnología, la compañía se ha consolidado como un proveedor líder de los ensayos de instrumentos de la industria, desempeñando un papel crucial en la investigación y desarrollo de la alta calidad y productos de alto valor dentro de la industria. Ai Si Li (China) Test Equipment Co., Ltd. es autenticado por las autoridades de los centros de prueba, incluyendo el “National Measurement and Testing Center and South China Center of Metrology”. Famoso por la precisión y fiabilidad, estos productos han sido ampliamente utilizados dentro de la industria, por instituciones de investigación, organismos de inspección de calidad, y de los colegios y universidades tanto a nivel nacional como en el extranjero, atendiendo a una base de clientes en todo el mundo. (ASLi Testing, 2019). 18.
(28) •. Unimec SA. Unimec SA fue fundada en 1979 por una empresa especializada en la fabricación de relojes. En 1999, la empresa se independizó. En 2013, E. Remonnay y C. Froidevaux se hicieron cargo de la empresa. Al principio, Unimec estaba trabajando en el campo de la automatización y la compañía se ha convertido en una referencia en este sector, especialmente con sus mesas con movimiento recíproco y sus brazos de transporte. En la década del 2000, Unimec diversificó su actividad recurriendo a otros sectores comerciales, como la producción de máquinas y equipos para la industria de la relojería, la medicina y la microtecnología. (UNIMEC, 2019). •. BRECON - Smart Vibration Technology. Como compañía derivada de BOSCH, BRECON resalta desde 1995 por ofrecer soluciones inteligentes en el campo de la vibración para compactación, transporte y otras aplicaciones industriales. BRECON está ubicada en Colonia-Alemania. Nosotros ofrecemos productos de ingeniería y asesoramiento a nivel mundial. Como antiguo titular exclusivo de la licencia BOSCH y con nuestra experiencia y know-how en la aplicación de tecnología vibratoria en muchas industrias, ampliamos de manera continua nuestra línea de productos. El desarrollo de nuevos productos se realiza siguiendo los requerimientos del mercado y a menudo es llevado a cabo en estrecha colaboración con fabricantes de maquinaria. Nuestros vibradores aseguran un tiempo de producción constante y resultados reproducibles de calidad. (BRECON, 2019). •. URBAR Soluciones De Ingeniería. Urbar es una empresa especializada en la aplicación de tecnologías basadas en la vibración al diseño de maquinaria de uso industrial. La compañía retiene los 60 años de experiencia de su empresa matriz en el diseño y comercialización de maquinaria e instalaciones vibrantes, con lo que se ha convertido en referente en cuanto a calidad, durabilidad y prestaciones dentro del mercado de la maquinaria vibrante. Los productos de Urbar se utilizan en aquellas aplicaciones donde es necesario trasladar, elevar, tamizar, clasificar o dosificar sólidos, entre los que se encuentran elementos tan dispares como piezas de fundición, piedras en canteras, arcillas, todo tipo de alimentos (congelados, galletas, pre-cocinados, caramelos, fritos, etc.), vidrio, cerámica, cemento, productos químicos (plásticos, colorantes, detergentes, fertilizantes) (URBAR, 2019). 19.
(29) En la tabla mostrada a continuación se muestran varios bancos utilizados para el análisis de vibraciones mecánicas, producidos por las empresas especializadas en este campo:. Tabla 2.2 Bancos de pruebas de vibraciones mecánicas (parte 1).Fuente: Elaboración propia. Tabla 2.3 Bancos de pruebas de vibraciones mecánicas (parte 2).Fuente: Elaboración propia. Nota: Las zonas en negro indican que dicha información no es suministrada por el proveedor.. 20.
(30) Teniendo en cuenta las tablas mostradas anteriormente se realizará a continuación un análisis de cada máquina, con el fin de generar precedentes a tener en cuenta para el diseño del mecanismo.. 2.3.2 Bancos de Prueba de Vibraciones Mecánicas. •. Máquinas de ensayo "Tabla de Vibración". Inicialmente se puede observar una correlación entre los rangos de frecuencia suministrada por el mecanismo (De 2.5 a 5 Hz) y la capacidad de carga que tiene el banco (100Kg), la relación es inversamente proporcional, lo cual implica que en tanto la carga del elemento a analizar vaya en aumento la frecuencia suministrada por el mecanismo deberá verse disminuida. Ya que es el mecanismo el que transmitirá la potencia y el movimiento, este estará sometido a los mayores esfuerzos, es decir que hay una relación directamente proporcional entre la capacidad de carga del banco y el tamaño de los elementos del mecanismo, en tanto que una carga más elevada implica eslabones más robustos o un material más resistente al proceso. De igual manera, aumentar el tamaño de los elementos del mecanismo para suplir la capacidad deseada (100kg), aumenta el peso de la máquina. El rango de peso de estas máquinas oscila entre los 100 y 500 Kg según la frecuencia requerida (De 2.5 a 5 Hz). Según el volumen de la carga a analizar, se puede requerir maquinaria con dimensiones mayores o menores, tal y como se muestra en la tabla, realizar un aumento en las medidas de la maquina aumenta el peso de la misma. La maquinaria de este tipo, con los requerimientos materiales, y de sensorica especializada ofrecen altos márgenes de calidad, fiabilidad y precisión en los datos recolectados, por tal razón, su costo de producción es elevado y dependiendo de la serie o variante de la maquina su precio puede oscilar entre los 4500 y 22000 dólares. Al generar el movimiento de la mesa en el plano X, Y, el mecanismo requiere de más potencia de la que se requeriría si el movimiento fuese desarrollado en un solo eje. Aplicación: Probar la resistencia a la vibración de envases, juguetes, electrónicos, muebles, regalos, cerámica, equipo, etc. (Madeinchina, 2019). Ilustración 2.10 Equipo de prueba de vibración para circuito impreso, para modulo fotovoltaico y para celda solar. Fuente: (Madeinchina, 2019). 21.
(31) •. Sistemas de prueba “agitadores de vibración de alta frecuencia”. Es posible observar que, en este banco de prueba pese a tener una carga considerable de 70 Kg, es posible alcanzar valores muy altos de frecuencia, cercanos a los 3500Hz, esto se puede adjudicar a varias razones: -Debido a que el movimiento generado por el mecanismo hacia la mesa es unidireccional -El peso combinado de la mesa y del elemento a analizar, son pequeños en comparación a la potencia suministrada Aplicación: Educación, Investigación y laboratorio de entornos, Respuesta estructural, Ensayos, Análisis modal, Separación y la compactación de polvos. (Madeinchina, 2019). Ilustración 2.11 Equipo de prueba de vibraciones vertical y horizontal por funcionamiento electrohidráulico. Fuente: (Madeinchina, 2019). 22.
(32) Ilustración 2.12 Equipo de prueba de vibraciones trabajando en posición horizontal. Fuente: (Madeinchina, 2019). Ilustración 2.13 Mesa aforada del equipo de prueba de vibraciones. Fuente: (Madeinchina, 2019). 23.
(33) •. Bancos de prueba de vibraciones para la industria relojera. Para este caso de aplicación en particular la frecuencia suministrada por el mecanismo a la bancada es bastante elevada, sin embargo, el elemento a analizar posee una carga muy pequeña en comparación, al igual que en el caso anterior el desplazamiento generado es unidireccional. La sensorica de alta capacidad permite evaluar el funcionamiento de múltiples sistemas a la vez, recopilando y transmitiendo la información al sistema de análisis. Aplicación: Comprobar la adaptabilidad, seguridad y resistencia de los componentes contenidos en elementos de relojería. (UNIMEC, 2019). Ilustración 2.14 Banco de prueba de vibraciones y fatiga para relojería. Fuente: (UNIMEC, 2019). Ilustración 2.15 Montaje del elemento para análisis. Fuente: (UNIMEC, 2019). 24.
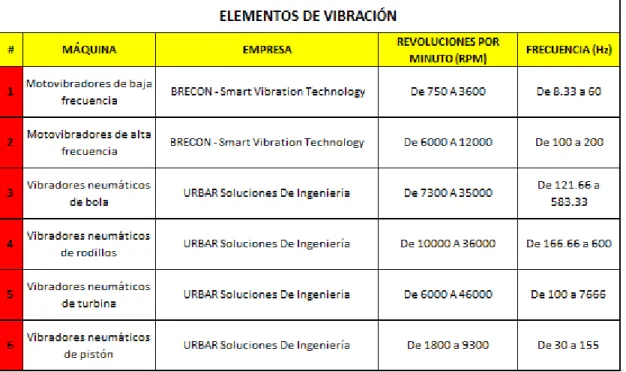
(34) 2.3.3 Elementos de Vibración En la tabla mostrada a continuación se muestran varios elementos utilizados para generar vibraciones mecánicas en las mesas, dichas máquinas son producidas por las empresas especializadas en este campo:. Tabla 2.4 Elementos de vibración (parte 1).Fuente: Elaboración propia. Tabla 2.5 Elementos de vibración (parte 2). Fuente: Elaboración propia. 25.
(35) Todas las maquinas vibrantes mostradas anteriormente son utilizadas para diversas aplicaciones industriales y de ingeniería, sin embargo y como aplicación de interés para este caso en particular, se debe decir que funcionan como componente generador de movimiento en las mesas de vibraciones mecánicas, el proceso más usual consiste en ubicar los vibradores o motovibradores a lo largo de la parte inferior de la mesa o en sus laterales, como se muestra a continuación:. Ilustración 2.16Ubicacióndeloselementosdevibración(vistalatera) Fuente:(Urbar, 2019). Ilustración 2.17 Ubicación de los elementos de vibración (Vista frontal) Fuente:(Urbar, 2019). 26.
(36) Se puede evidenciar el uso de “tacos de goma”, los cuales son utilizados para que la vibración generada se aplique solamente a la región de la plataforma vibrante y no se transmita al bastidor, lo cual podría incurrir en desgaste, desalineación y toma errada de datos.. Ilustración 2.18 Componentes de una mesa de vibraciones. Fuente: Italvibras. Los motovibradores tanto de alta como de baja frecuencia, funcionan mediante el principio de excentricidad, la vibración es producida por medio de pesos excéntricos fijos en ambos extremos del eje del motor, para ajustar la intensidad de la vibración basta con regular los contrapesos en ambos extremos, como se muestra en el esquema mostrado a continuación:. Ilustración 2.19 Esquema de variación de frecuencia para un moto vibradora .Fuente: YouTube. 27.
(37) Ilustración 2.20 Isométrico de un moto vibrador. •. Motovibradores de baja frecuencia. Los motovibradores industriales de baja frecuencia combinan mayores amplitudes con fuerzas que pueden ser desde pequeñas o medianas a extremadamente grandes. El peso promedio de este tipo de máquinas puede encontrarse entre los 76 y los 210 kg, el cual es bastante elevado en comparación con otros elementos y sistemas de vibración, no obstante, compensa esta deficiencia con dimensiones reducidas, las cuales lo hacen más compacto y versátil frente a requerimientos de poco espacio. Ofrece rangos de frecuencia bastante elevados por precios que oscilan entre 1 y 3 millones de pesos, precio bastante reducido en comparación con otros sistemas previamente vistos.. •. Motovibradores de alta frecuencia. Los motovibradores industriales de alta frecuencia generan magnitudes de revolución sumamente altos, sin embargo, son mucho más livianos y compactos que los de baja frecuencia.. Aplicación: Compactación de hormigón, Compactación de refractarios, Compactación de sólidos, Transportar y cribar, Desapelmazar y desprender, Apisonadores eléctricos y mesas de vibración.. 28.
(38) •. Vibradores neumáticos de bola. Los vibradores neumáticos de bola son elementos mecánicos altamente potentes, que ofrecen valores extremos de frecuencia, aplicando magnitudes de presión entre 2 y 6 bar con consumos de aire entre 83 y 675 litros/min. La frecuencia suministrada es completamente regulable. La vibración se genera mediante el desplazamiento de una esfera contenida en una recamara cubierta por dos tapas de nylon, la esfera es conducida por unas vías de acero. El cuerpo de aleación de aluminio extruido, cuenta con cuatro orificios de montaje para ser utilizados según la aplicación. Estos sistemas cuentan con la ventaja de ofrecer valores altos de frecuencia, con valores peso y dimensiones muy reducidos, por lo que son elementos de gran versatilidad a costos muy bajos. Aplicación: Vaciado de tolvas, Tamices de filtraje, Mesas vibratorias, Prevención del pegado en tuberías y silos, Movimiento de mercancías.. Catálogo Urbar. Tabla 2.6 Dimensiones de los vibradores neumáticos de bola. Fuente: Catálogo Urbar. 29.
(39) •. Vibradores neumáticos de rodillo. Los vibradores neumáticos de rodillo son elementos mecánicos con una gran fuerza de arrastre, que ofrecen valores extremos de frecuencia, aplicando magnitudes de presión entre 2 y 6 bar con consumos de aire entre 100 y 970 litros/min. La frecuencia suministrada es completamente regulable. La vibración se genera mediante el desplazamiento de un rodillo de acero, el cual gira contenido entre dos tapas de plástico. El cuerpo de aleación de aluminio extruido, cuenta con cuatro orificios de montaje para ser utilizados según la aplicación. Estos sistemas cuentan con la ventaja de ofrecer valores altos de frecuencia, con valores peso y dimensiones muy reducidos, por lo que son elementos de gran versatilidad a costos muy bajos. Aplicación: Vaciado de tolvas, Tamices de filtraje, Transporte de pequeñas partículas, Prevención del pegado en tuberías y silos, Transporte de polvos finos, Compactación de plásticos y hormigón en moldes, Mesas vibratorias.. Ilustración 2.22 Esquema y plano de los vibradores neumáticos de rodillo. Fuente: Catálogo Urbar. Tabla 2.7 Dimensiones de los vibradores neumáticos de rodillo. Fuente: Catálogo Urbar. 30.
(40) •. Vibradores neumáticos de turbina. Los vibradores neumáticos de turbina son elementos mecánicos bastante potentes, que ofrecen valores extremos de frecuencia, aplicando magnitudes de presión entre 2 y 6 bar con consumos de aire entre 33 y 970 litros/min. La frecuencia suministrada es completamente regulable, el sistema no necesita aceite y es extremadamente silencioso. La vibración se genera mediante la fuerza centrífuga de los pares positivos y negativos desequilibrados en el rotor, dicho rotor se encuentra sobre dos rodamientos de bolas previamente lubricados con grasa especial para una larga vida útil. Estos sistemas cuentan con la ventaja de ofrecer valores altos de frecuencia, con valores peso y dimensiones muy reducidos, por lo que son elementos de gran versatilidad a costos muy bajos. Aplicación: Vaciado de tolvas, Tamices de filtraje, Mesas vibratorias, Prevención del pegado en tuberías y silos, Movimiento de mercancías a granel.. Ilustración 2.23 Esquema y plano de los vibradores neumáticos de turbina. Fuente: Catálogo Urbar. Ilustración 2.8 Dimensiones de los vibradores neumáticos de turbina. Fuente: Catálogo Urbar. 31.
(41) •. Vibradores neumáticos de cilindro. Los vibradores neumáticos de cilindro son elementos mecánicos altamente silenciosos y eficientes, que ofrecen valores extremos de frecuencia, aplicando magnitudes de presión entre 2 y 6 bar con consumos de aire entre 0.8 y 490 litros/min. La frecuencia y amplitud de oscilación completamente regulables. Cuerpo de aluminio con anodizado duro, altamente resistente a la corrosión, Pistón de bronce al plomo. Estos sistemas cuentan con la ventaja de ofrecer valores altos de frecuencia, con valores peso y dimensiones muy reducidos, por lo que son elementos de gran versatilidad a costos muy bajos. Aplicación: Accionamiento de canaletas de transporte y extracción, Esponjamiento y compactación de mercancías a granel, Activación de procesos mecánicos, Mesas vibratorias.. Ilustración 2.24 Esquema y plano de los vibradores neumáticos de cilindro. Fuente: Catálogo Urbar. 32.
(42) Tabla 2.9 Dimensiones de los vibradores neumáticos de cilindro. Fuente: Catálogo Urbar. 33.
(43) CAPÍTULO 3: DESARROLLO DEL PROYECTO. 3.1 DETERMINACIÓN DE PARAMETROS Como se puede apreciar, no existen rangos estandarizados de frecuencia o capacidad máxima, pero sí podemos establecer una aproximación de la gama de estos según la aplicación a desarrollar, por tal razón es posible relacionar el diseño del mecanismo desde tres aspectos principales:. Ilustración 3.1 Factores del diseño. Fuente: Elaboración propia. Como se mencionó anteriormente diseñar el mecanismo implica reconocer y entender tanto el entorno como la aplicación que se le dará al banco de vibraciones, ya que esta información determinará factores como la capacidad (carga máxima), la frecuencia que debe suministrar el mecanismo desde la fuente de trabajo, los materiales a trabajar (Metal, Polímero, Cerámico), la geometría y las dimensiones del sistema completo. Por tal razón, dichos datos serán establecidos tomando como sitio de aplicación un laboratorio de la universidad Distrital Francisco José De Caldas, para el cual se cuenta con un espacio límite de 2000x2000x2000 por lo que el diseño del mecanismo será considerado para una mesa y una bancada que se adecuen a las dimensiones restrictivas. En vista del espacio disponible, el diseño del mecanismo será desarrollado con el objetivo de suministrar frecuencias bajas/medias, para el análisis de elementos de baja a media escala. El intervalo de frecuencia requerido para la mesa de vibraciones estará definido por el tipo de movimiento que esta ejecute, ya que como se observó anteriormente para aplicaciones que requieran netamente movimiento lineal se pueden generar valores de frecuencia más elevados, contrario a movimientos de tipo circular o de tipo multiaxial, por tal razón en la tabla mostrada a continuación se muestran los intervalos de frecuencia considerados para distintos tipos de desplazamiento en el plano X, Y.. 34.
(44) Tabla 3.1 Frecuencias y parametros del mecanismo. Fuente: Elaboración propia. 3.1.1 ANÁLISIS DE MOVIMIENTO LINEAL EN DOS EJES Para realizar el proceso analítico de la posición, velocidad y aceleración con la que trabajan los mecanismos y por tanto las mesas de vibración, se utiliza como herramienta el software CAE de Working Model el cual permite crear procesos de simulación de sistemas mecánicos reales; para este caso en particular se realizará el estudio de los tres parámetros requeridos bajo frecuencias específicas en tres sistemas diferentes. Cabe destacar que para los siguientes análisis se tomó un valor para la gravedad de 9.807 m/s^2 y se omitieron factores como la resistencia del aire o fuerzas electrostaticas. El primer sistema a analizar es un mecanismo que permite generar un movimiento bidireccional en la mesa, inicialmente un eslabonamiento de manivela- corredera describe un desplazamiento en dirección al eje X (contenido en el plano X,Y) posteriormente, empleando ruedas dentadas, se transmite este mismo movimiento hacia otra corredera la cual desplaza una leva que genera el movimiento final, el cual se encuentra en el eje Y, este diseño es útil si se desea crear un movimiento combinado en dos ejes. A continuación, se muestra el análisis de posición, velocidad y aceleración realizado sobre una de las correderas dentadas y debido que las características de movimiento de ambas son muy similares, variando una de la otra solamente por la dirección en la que se desplazan se considera que es el mismo procedimiento de análisis.. Ilustración 3.2 Movimiento lineal en dos ejes (Esquema del eslabonamiento) .Fuente: Elaboración propia. La grafica mostrada a continuación da evidencia del dato contenido en la tabla 3.1 para el movimiento lineal en dos ejes, donde el cambio límite de posición para este caso va a estar definido por la longitud de la manivela del mecánismo, la cual es de 45 mm, dado que la manivela no va a cambiar su longitud durante cualquiera de los dos procesos (a 25 o 50 Hz) el cambio de posición máximo se mantendra. 35.
(45) A continuación, se muestran las gráficas donde es posible observar los valores de velocidad y aceleración con los que se desplaza la mesa,los cuales son de aproximadamente, 7.6 m/s y 1560 m/s^2 para una frecuencia de 25Hz, y 15.3 m/s y 6233 m/s^2 para un valor de frecuencia de 50 Hz.. Ilustración 3.3Parámetros de velocidadyaceleración del movimientolinealendosejes a 25 Hz. Fuente: Elaboración propia. 36.
(46) Para el análisis de velocidad a 25Hz se muestra una gráfica de velocidad contra tiempo, con el fin de evidenciar cómo se comporta este parámetro con respecto a un tiempo de proceso determinado; Para este caso se tomó un valor cercano a los 5 segundos, durante este intervalo el mecanismo realizó su desplazamiento y cambió su velocidad, alcanzando un valor máximo de aproximadamente 7.6 m/s. Para el análisis de aceleración a 25Hz se realizó el mismo procedimiento que para la velocidad, donde se alcanzan valores de aceleración máxima cercanos a los 1560 m/s^2.. Ilustración 3.4Parámetros de velocidadyaceleración del movimientolinealendosejes a 50 Hz. Fuente: Elaboración propia. 37.
(47) 3.1.2 ANÁLISIS DE MOVIMIENTO CIRCULAR. El segundo sistema a analizar es un mecanismo que genera movimiento circular en la mesa, empleando un punto de anclaje fijo ubicado en la periferia de un eslabón rotativo. En la imagen mostrada a continuación se observa que el cambio de posición en el eje X y en el eje Y, va a estar definido por la distancia que existe desde el centro de la rueda grande que se encuentra rotando hasta el centro del anclaje ubicado en el extremo, para este caso específico el cambio límite de posición radial es de 40.5 mm.. Ilustración 3.5 Movimiento circular (Esquema del eslabonamiento). Fuente: Elaboración propia. Las graficas mostradas a continuación dan evidencia de los datos contenidos en la tabla 3.1 para el movimiento circular, donde es posible observar los valores de velocidad y aceleración con los que se desplaza la mesa los cuales son de aproximadamente, 2.5 m/s y 315 m/s^2 para una frecuencia de 20Hz, y 3.1 m/s y 493 m/s^2 para un valor de frecuencia de 25 Hz.. 38.
(48) 39.
(49) Ilustración 3.6 Parámetros de velocidad y aceleración del movimiento circular a 20 Hz. Fuente: Elaboración propia. Como se puede observar en las gráficas mostradas anteriormente, tanto la velocidad como la aceleración tienen componentes tanto en X como en Y, dichos parámetros se encuentran variando durante el proceso de movimiento del mecanismo, es decir, para el caso de la velocidad cuando esta alcanza su valor máximo en el componente X (aproximadamente 2.5 m/s), se encuentra en su valor más pequeño en Y. El mismo comportamiento se evidencia para la aceleración, cuando alcanza su valor máximo en el componente X (Aproximadamente 316 m/s^2), se encuentra en su valor más pequeño en Y.. 40.
(50) 41.
(51) Ilustración 3.7 Parámetros de velocidad y aceleración del movimiento circular a 25 Hz. Fuente: Elaboración propia. Como se puede observar en las gráficas mostradas anteriormente, tanto la velocidad como la aceleración tienen componentes tanto en X como en Y, dichos parámetros se encuentran variando durante el proceso de movimiento del mecanismo, es decir, para el caso de la velocidad cuando esta alcanza su valor máximo en el componente X (aproximadamente 3.1 m/s), se encuentra en su valor más pequeño en Y. El mismo comportamiento se evidencia para la aceleración, cuando alcanza su valor máximo en el componente X (Aproximadamente 493 m/s^2), se encuentra en su valor más pequeño en Y.. 42.
(52) 3.1.3 ANÁLISIS DE MOVIMIENTO COMBINADO El tercer sistema a analizar es un mecanismo que genera movimiento semicircular en la mesa, empleando un mecanismo de cuatro barras que produce un desplazamiento lineal al comienzo. Para este apartado se implementó el programa de simulación Working Model 2D, como primer paso y debido a que este sistema es más complejo que los presentados anteriormente se desarrolló el mecanismo total en un ambiente 2D siguiendo los planos previos al montaje como es el siguiente:. Ilustración 3.8 Posiciones para el movimiento combinado. Fuente: Elaboración propia. Usando la plataforma AutoCAD se crearon los bocetos, después de esto tan solo se llevó al programa Working Model 2D, para completar su creación y corroborar las medidas y ángulos correspondientes se usó el plano de ensamble (se encuentra en los anexos). Para empezar a analizar los datos correspondientes y tal como se estableció en la tabla de parámetros, para este diseño se busca poder suministrar una frecuencia de hasta 15 Hz en la salida del mecanismo (entrada a la mesa), para esto se analizó en el programa la velocidad que relaciona las RPM de entrada con las de salida, en este caso se tiene que:. = 5000 = 907,918. =. 907,918 = 0,18 5000 43.
Figure




+7





Documento similar
Universidad Distrital Francisco José de caldas Tecnología en gestión ambiental y servicios públicos Helmut Espinosa Garcia Yolima del Carmen Agualimpia Dualiby 27 de junio de 2018 25
87 UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS INGENIERÍA EN TELECOMUNICACIONES (FACULTAD TECNOLÓGICA). Al ingresar el supervisor puede observar una base de datos con
Departamento de tecnologia, este plano y la información en el contenido, son propiedad de UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS y no puede ser copiada ni usarlo de
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS TECNOLOGÍA EN ELECTRICIDAD 3.11 INSTALACIONES PROVISIONALES Cuando hay presentaciones en la plazoleta, la energización del sonido
ESPECIALIZACIÓN EN AVALÚOS UNIVERSIDAD DISTRITAL “FRANCISCO JOSÉ DE CALDAS” Así bien, para el desarrollo comparativo de los métodos de renta y mercado se toma uno de los
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE ARTES ASAB PROYECTO CURRICULAR DE ARTES MUSICALES ELEMENTOS TÉCNICOS E INTERPRETATIVOS
Universidad Distrital Francisco José de Caldas – Ingeniería Forestal RESUMEN La presente investigación se desarrolló en el Municipio de Guasca, Municipio de Tabio y los cerros de
Milena Usme Número de páginas: 50, Valoración: Aprobada, Institución: Universidad Distrital "Francisco José De Caldas" Autores: JULIAN ANDRES SALAMANCA BERNAL, 4.- Trabajos de grado
