1 HERRAMIENTA DE APOYO AL APRENDIZAJE E IMPLEMENTACIÒN
DE FUENTES DE CONMUTACIÓN
IVÁN FRANCISCO VELÁSQUEZ SASTOQUE
PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA
2 HERRAMIENTA DE APOYO AL APRENDIZAJE E IMPLEMENTACIÓN
DE FUENTES DE CONMUTACIÓN
IVÁN FRANCISCO VELÁSQUEZ SASTOQUE
DIRECTOR
ING. ABDEL KARIM HAY HARB ING. ARTURO FAJARDO JAIMES
PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA
3 RECTOR MAGNIFICO: P. JOAQUÍN EMILIO SÁNCHEZ GARCÍA S.J.
DECANO ACADEMICO: Ing. JORGE LUIS SÁNCHEZ TÉLLEZ.
DECANO DEL MEDIO UNIVERSITARIO: P. SERGIO BERNAL RESTREPO, S.J. DIRECTOR DE DEPARTAMENTO: Ing. FRANCISCO VIVEROS MORENO. DIRECTOR DE CARRERA: Ing. JAIRO ALBERTO HURTADO LONDOÑO. DIRECTOR DEL PROYECTO: Ing. ABDEL KARIM HAY HARB
4 ARTICULO 23 DE LA RESOLUCIÓN No. 13 DE JUNIO DE 1946
"La universidad no se hace responsable de los conceptos emitidos por sus alumnos en sus proyectos de grado.
5 AGRADECIMIENTOS
A mis padres que me han permitido acceder a una educación de alta calidad, y me han apoyado durante todos mis logros.
A los Ingenieros Arturo Fajardo y Karim Hay por su apoyo durante la ejecución del proyecto.
6 TABLA DE CONTENIDO
1 INTRODUCCIÓN ... 9
2 MARCO TEORICO ... 11
2.1 SISTEMA DE PROCESAMIENTO DE POTENCIA ... 11
2.2 FUENTES DE CONMUTACIÓN ... 12
2.3 FUENTES EN ESTADO ESTACIONARIO ... 13
2.4 MODELO AC DE UNA FUENTE DE CONMUTACIÓN ... 14
2.4.1 FUNCIONES DE TRANSFERENCIA EN UNA FUENTE DE CONMUTACIÓN ... 17
2.5 MODULADOR DE ANCHO DE PULSO PWM ... 18
2.6 CONTROL DE UNA FUENTE DE CONMUTACIÓN ... 18
2.7 CRITERIO DE ESTABILIDAD DE MARGEN DE FASE Y MARGEN DE GANANCIA 19 2.7.1 Margen de ganancia ... 20
2.7.2 Margen de fase ... 20
2.8 ACCIONES BASICAS DE CONTROL PARA UN CONVERSOR ... 20
2.8.1 CONTROLADOR PD ... 20
2.8.2 CONTROLADOR PI ... 21
2.8.3 COMPENSADOR PID ... 22
2.9 SISTEMA DE CONTROL DIGITAL ... 22
2.10 TRANSFORMADA Z ... 23
3 ESPECIFICACIONES ... 24
3.1 ESPECIFICACIONES GENERALES DE LA HERRAMIENTA ... 24
3.2 TEMATICAS PRESENTADAS ... 25
3.2.1 Módulo Entrenamiento DSP ... 25
3.2.2 Módulo fuentes de conmutación ... 26
3.3 Especificaciones de software ... 28
3.4 Especificaciones de Hardware ... 29
3.4.1 Tarjeta de Potencia ... 29
3.4.2 Tarjeta de Control análogo ... 30
3.4.3 Tarjeta de Fuentes DC ... 30
4 DESARROLLOS ... 31
4.1 Documentación de la herramienta ... 31
4.1.1 Formato estándar de la documentación de la herramienta ... 31
4.1.2 Diseño del módulo de entrenamiento del DSP ... 32
4.1.3 Diseño del módulo de fuentes de conmutación ... 32
4.1.4 Implementación de la topología Buck con control PI análogo. ... 33
4.1.5 Implementación de un controlador digital para la topología Buck utilizando el procesador digital de señales DSP320F28335 ... 34
7
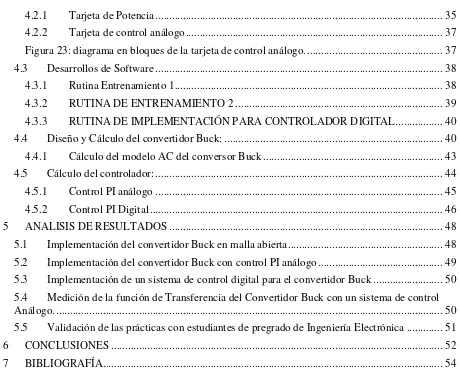
4.2.1 Tarjeta de Potencia ... 35
[image:7.595.82.542.48.424.2]4.2.2 Tarjeta de control análogo ... 37
Figura 23: diagrama en bloques de la tarjeta de control análogo. ... 37
4.3 Desarrollos de Software ... 38
4.3.1 Rutina Entrenamiento 1 ... 38
4.3.2 RUTINA DE ENTRENAMIENTO 2 ... 39
4.3.3 RUTINA DE IMPLEMENTACIÓN PARA CONTROLADOR DIGITAL ... 40
4.4 Diseño y Cálculo del convertidor Buck: ... 40
4.4.1 Cálculo del modelo AC del conversor Buck ... 43
4.5 Cálculo del controlador: ... 44
4.5.1 Control PI análogo ... 45
4.5.2 Control PI Digital ... 46
5 ANALISIS DE RESULTADOS ... 48
5.1 Implementación del convertidor Buck en malla abierta ... 48
5.2 Implementación del convertidor Buck con control PI análogo ... 49
5.3 Implementación de un sistema de control digital para el convertidor Buck ... 50
5.4 Medición de la función de Transferencia del Convertidor Buck con un sistema de control Análogo. ... 50
5.5 Validación de las prácticas con estudiantes de pregrado de Ingeniería Electrónica ... 51
6 CONCLUSIONES ... 52
8 LISTA DE FIGURAS
Figura1: Diagrama general de un sistema de procesamiento de potencia. Figura2: Diagrama de una fuente de conmutación como sistema Figura 3: Señal de control para los interruptores en un conversor
Figura 4: Modelo de un conversor DC-DC utilizando el modelo ideal del transformador [3]
Figura 5: Diagrama general de una fuente de conmutación desde la perspectiva de un sistema de control Figura 6: Componentes de frecuencia de la señal de salida en un conversor
Figura 7: señal con componentes en alta baja frecuencia. [3]
Figura 8: Diagrama de una fuente de conmutación considerando las diferentes funciones de transferencia Figura 9: Modulador por amplitud de pulso PWM
Figura 10: Diagrama de bode de la función T(s) correspondiente a la ganancia de lazo cerrado con un controlador PD [3]
Figura11: Diagrama de bode de la función T(s) correspondiente a la ganancia de lazo cerrado con un controlador PI
Figura 12: Diagrama general de un sistema de control digital
Figura13: Diagrama general de la herramienta de apoyo al aprendizaje e implementación de fuentes de conmutación
Figura14: Diagrama general del módulo de Entrenamiento para el manejo del DSP Figura15: Diagrama general del módulo de Fuentes de conmutación
Figura16: Diagrama funcional de las experiencia correspondiente al capítulo 1 Figura17: Diagrama funcional de las experiencia correspondiente al capítulo 2 Figura18: Diagrama funcional de las experiencia correspondiente al capítulo 3 Figura19: Diagrama funcional de la tarjeta de potencia
Figura20: Diagrama funcional de la tarjeta de control análogo
Figura 2: Implementación de la topología buck con un sistema de control digital integrando la plataforma de hardware y
Figura 23: diagrama en bloques de la tarjeta de potencia. Figura 22: Tarjeta de potencia buck
Figura 23 : diagrama en bloques de la tarjeta de control análogo. Figura 24: Tarjeta de control análogo
Figura 25: diagrama de flujo de programa de las rutinas “Entrenamiento 1” y “Entrenamiento 2”. Figura 26: diagrama de flujo de programa de la rutina “Controlador digital”.
Figura 27 circuito básico del conversor buck a diseñar
Figura 29: Representación del modelo resultante del conversor buck
Figura 30: Diagrama en bloques del sistema de control realimentado análogo implementado Figura 31: Diagrama de respuesta en frecuencia del sistema en lazo cerrado
Figura 32: Diagrama de respuesta en frecuencia de la ganancia del sistema en lazo cerrado antes y después de compensar.
Figura 33: Modificación del sistema causadas por la implementación del controlador con un DSP
Figura 34: Funciones de conversión malla abierta para el modo continuo a) implementación con dos Mosfets y b) Implementación con un Mosfet y un diodo.
Figura 35 : Señal de corriente AC en el condensador a), y señal a la entrada y a la salida del filtro LC
Figura 36: Verificación del controlador análogo : a) modificando la resistencia, b) modificando el valor del voltaje de entrada
Figura 37: Verificación del controlador Digital : a) modificando la resistencia b) modificando el valor del voltaje de entrada
Figura 38: Verificación de los diferentes valores de interés en el sistema con ayuda de la herramienta CODE COMPOSER STUDIO
9
1 INTRODUCCIÓN
El objetivo general de la electrónica de potencia está enfocado en controlar y procesar el flujo de potencia de forma tal que esta sea suministrada a la carga de manera óptima [1], bajo este contexto las fuentes de conmutación conforman una interfaz entre las fuentes de energía y los diferentes tipos de cargas.
En la actualidad más del 75% de la potencia generada en el mundo es procesada por medio de elementos de potencia electrónicos [2], lo cual evidencia la importancia de las fuentes de conmutación en el procesamiento de potencia en el mundo.
Durante muchos años el control en las fuentes de conmutación estuvo dominado por los circuitos de control análogo, dado que una de sus principales ventajas estaba dada por su bajo costo y simplicidad, pero la evolución de los circuitos digitales integrados tales como micro controladores y procesadores ha permitido que estos también alcancen un bajo costo; por otro lado las aplicaciones actuales implican diseños más exigentes para las fuentes de conmutación, lo que conlleva al uso de las últimas tecnologías con el fin de suplir completamente las necesidades actuales de las diferentes aplicaciones. Un procesador digital de señales es un dispositivo digital que se caracteriza por tener la capacidad de operar datos de carácter digital en un tiempo bastante corto de forma tal que se puede considerar en tiempo real, un DSP cuenta con unidades de hardware adicionales, también llamadas periféricos, y rutinas de control predeterminadas que al utilizarse permiten la inclusión de técnicas de control de mayor robustez.
La temática de fuentes de conmutación en la pontificia universidad Javeriana es tratada en varias materias, en algunos casos de forma parcial, es decir en algunas materias la presentación de la temática se enfoca a lo teórico estrictamente mientras en otras asignaturas como diseño no lineal el enfoque es netamente dado a la implementación, es por lo anterior que surge la necesidad de contar con una herramienta que permita la presentación de diferentes conceptos relevantes a la temática de las fuentes de conmutación, y de forma simultánea se preste para la realización de diferentes practicas sobre un circuito que permita la verificación de los conceptos presentados.
Además se presenta como valida una herramienta que permita el entrenamiento para el manejo y programación de un dispositivo digital como un DSP, dando lugar así a la implementación de un controlador digital para un conversor DC-DC, o en general cualquier otro sistema de potencia.
En el presente proyecto se desarrolla una herramienta de apoyo al aprendizaje e implementación de fuentes, dicha herramienta está constituida principalmente por elementos de hardware, software, y documentación, la herramienta se diseño de forma tal que se cumplan los siguientes objetivos:
• Objetivo General: Diseñar una herramienta de aprendizaje enmarcada en el diseño e implementación de fuentes de conmutación controladas digitalmente.
• Objetivos Específicos:
Implementar dos topologías de fuentes de conmutación controladas digitalmente por medio de un DSP.
Diseñar cuatro experiencias de aprendizaje sobre la plataforma hardware software diseñada.
Diseñar dos experiencias introductorias para el manejo de DSP.
10 En el presente documento se realiza un informe detallado de la herramienta desarrollada, En el marco teórico se presentan los conceptos necesarios para el desarrollo de una herramienta que a nivel de hardware permita la implementación de una fuente de conmutación controlada digitalmente por un DSP.
Posteriormente se realiza la descripción general de la herramienta presentando las especificaciones de los diferentes elementos que componen la herramienta, seguido de la presentación de los diferentes desarrollos realizados durante el proyecto.
11
2 MARCO TEORICO
2.1 SISTEMA DE PROCESAMIENTO DE POTENCIA
La tarea de un sistema de potencia electrónico es procesar y controlar el flujo de energía eléctrica con el fin de que se suministre el voltaje y la corriente justa requerida por determinada carga[1], en general un sistemas como el mencionado se puede ilustrar en la figura 1:
Figura1: Diagrama general de un sistema de procesamiento de potencia.
Generalmente un sistema de potencia electrónico obtiene la señal en el puerto de entrada a partir de la línea eléctrica, y las características de la corriente y el voltaje de salida, están sujetas al tipo de carga y a la aplicación, adicionalmente se cuenta con un sistema de control el cual permite después de realizar mediciones, comparar con una referencia, y encontrar una señal de error la cual permite al sistema de control generar las señales necesarias, con el fin de cambiar el procesamiento y así minimizar el error al suministrarle a la carga el voltaje y la corriente requerida, de manera eficiente y lo más precisa posible.
En general los sistema de procesamiento de potencia están bastante ligados a la conversión de energía, una forma general de clasificar los sistemas de procesamiento de potencia puede darse a partir de las características de frecuencia presentadas en el puertos de salida.
Salida en DC: Aquí se consideran dos tipos generales de sistemas de potencia, los presentan magnitudes DC constantes, o los que pueden ser ajustados en cuanto a magnitud.
Salida en AC: Corresponden los sistemas de procesamiento de potencia en los cuales se generen señales de salida de frecuencia constante y magnitud variable o viceversa.
Mientras que al considerar las características no solo de los puertos de salida sino también el puerto de salida, un sistema de procesamiento de potencia se puede considerarse como un convertidor de
energía, el cual se puede clasificar de la siguiente forma:
12
2.2 FUENTES DE CONMUTACIÓN
Las fuentes de conmutación son sistemas de procesamiento de potencia que permiten alimentar determinada carga con un voltaje regulado, a partir de una fuente de energía, en este caso voltaje, el cual generalmente no es regulado dado que se obtiene después de rectificar la señal de la línea de alimentación.
En la figura 2 se ilustra el diagrama general de una fuente de conmutación como sistema de procesamiento de potencia, indicando claramente sus puertos principales.
Figura2: Diagrama de una fuente de conmutación como sistema
Las fuentes de conmutación o también llamadas conversores DC-DC tienen diferentes aplicaciones, como son los manejadores de los motores DC, fuentes de voltaje de alta eficiencia y precisión, la cuales son aisladas cuando utilizan transformadores para un aislamiento eléctrico.
El funcionamiento de una fuente de conmutación se basa en el uso de elementos pasivos tales como condensadores e inductancias que permiten almacenar energía y no disiparla como ocurre con elementos como resistencias y reguladores, adicionalmente al generar señales de determinada frecuencia se pueden utilizar los elementos mencionados para realizar un proceso de filtrado, obteniendo así una señal DC resultante correspondiente promedio de la señal de frecuencia aplicada. Para generar la señal AC se utilizan uno a o mas interruptores implementados con diversos semiconductores, los cuales se controlan por medio de una señal de dos estados S(t), la cual permite controlar el encendido o apagado del interruptor:
[image:12.595.207.418.217.341.2]
Figura 3: Señal de control para los interruptores en un conversor
0
)
(
1
)
(
=
=
t
S
t
S
T
t
t
t
t
on
on
<
<
<
<
0
13 Para esta señal de control se define el ciclo útil como:
[image:13.595.201.421.218.386.2]T t D= on
[2.2.1]
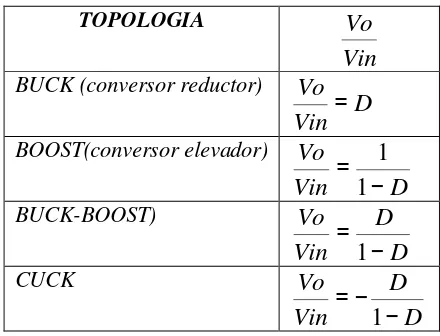
En la siguiente tabla se presentan las topologías más conocidas de fuentes de conmutación y su respectiva relación entre voltaje de entrada y voltaje de salida:
TOPOLOGIA
Vin
Vo
BUCK (conversor reductor)
D
Vin
Vo
=
BOOST(conversor elevador)D
Vin
Vo
−
=
1
1
BUCK-BOOST)D
D
Vin
Vo
−
=
1
CUCKD
D
Vin
Vo
−
−
=
1
Tabla 1: Relaciones entrada/salida de las principales topologías2.3 FUENTES EN ESTADO ESTACIONARIO
El estado estacionario en un conversor ocurre cuando todas sus variables de interés tales como voltajes y corrientes están descritas por señales periódicas o de valor constante, este estado también está sujeto a que no se presenten cambios o disturbios en valores como el voltaje de entrada, la resistencia de carga y el valor del ciclo útil de la señal que controla los interruptores, bajo estas circunstancias las ecuaciones de balance para el condensador y la inductancia constituyen una herramienta valida y útil para el análisis de los conversores en estado estacionario, en síntesis dichas ecuaciones indican que el voltaje promedio en una inductancia, y la corriente promedio por el condensador en un ciclo de trabajo son cero.
ECUACION DE BALANCE PARA EL CONDENSADOR
[2.3.1]
ECUACION DE BALANCE PARA LA INDUCTANCIA
14 Con el uso de estas ecuaciones el análisis de los conversores en estado estacionario es bastante sencillo, ya que a partir de ellas se obtiene una función M(D) correspondiente a la relación entre el voltaje de salida y el voltaje de entrada en términos del ciclo útil D de la señal de control s(t).
[image:14.595.142.484.363.432.2]= ( ) ∙
[2.3.3]
Considerando una eficiencia de un 100% para un conversor DC-DC se puede también encontrar una relación en términos la función M(D):
=
∙ = ∙
= ( ) ∙
[2.3.4]
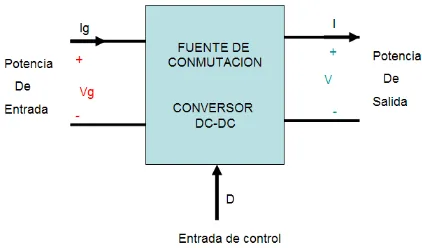
Finalmente una fuente de conmutación se puede modelar utilizando fuentes dependientes y a partir de este modelo utilizar el transformador ideal para obtener un modelo final de un conversor en estado estacionario.
Figura 4: Modelo de un conversor DC-DC utilizando el modelo ideal del transformador [3]
2.4 MODELO AC DE UNA FUENTE DE CONMUTACIÓN
15 Figura 5: Diagrama general de una fuente de conmutación desde la perspectiva de un sistema de control
En el sistema ilustrado se evidencia que en el sistema el valor del ciclo útil no es una entrada al sistema sino que corresponde a una señal de control.
Con el fin de modelar la fuente como un sistema retroalimentado, se debe contar con las funciones de transferencia que relacionen las variaciones AC de la señal salida con las diferentes entradas, para ello se realiza el moldeamiento en AC del conversor.
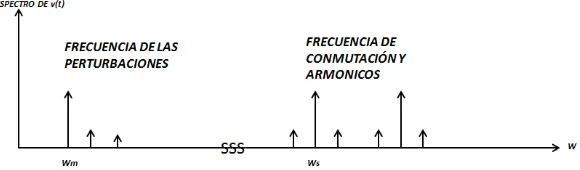
[image:15.595.168.455.59.222.2]Para la obtención del modelo se puede acudir y diferentes técnicas, en el presente documento utilizaremos una en especial, la cual parte de el espectro de la señal de salida en un conversor, el cual posee componentes frecuencia distantes entre sí, las cuales están asociadas a el valor de la frecuencia de las perturbaciones de las señales de entrada y sus armónicos, la cual se pueden considerar como componentes de baja frecuencia, y las restantes se asocian a la frecuencia de la señal conmutación y sus respectivos armónicos, la cual se podrá considerar como la componente de alta frecuencia[3], tal como se ilustra en la figura 6:
Figura 6: Componentes de frecuencia de la señal de salida en un conversor. [3]
[image:15.595.168.458.496.581.2]∫
+= t Ts t s Ts
T t
X( ) 1
dt
t
dV
C
dt
t
di
L
=
)
(
)
(
Como resultado, las ecuacion voltajes en la inductancia y en en la inductancia respectivame
F
Al aplicar las ecuaciones 2.4 variables del conversor como modelo que describa como comportamiento de la salida para describir la señal promed las componente DC de x(t), y
Ts
d
x(
τ
)τ
OPERADOR PROMEc L
i
V
=
=
)
c Ts L Ts i dt t V d C V dt t i d L = = ) ( ) ( [2.4iones del lado derecho describen el comportamie en el condensador cuando no son cero los promedi mente, es decir cuando no se encuentra en estado es
Figura 7: señal con componentes en alta baja frecuencia. [3]
2.4.2 y 2.4.3 a los diferentes conversores y cons o un valor DC con una pequeña componente AC mo las variaciones modeladas como compon a del sistema. A continuación y en adelante se u edio de x(t) en un periodo de tiempo Ts, mientras y su pequeña variación respectivamente.
)
(
ˆ
)
(
)
ˆ
)
(
)
(ˆ
)
(
)
(ˆ
)
(
)
(
(ˆ
)
t
i
I
t
i
t
V
V
t
V
t
i
I
t
i
t
d
D
t
d
g
V
t
Vg
g g gg
v
t
+
=
+
=
+
=
+
=
+
=
16 MEDIO [2.4.2] 2.4.3]iento de las corrientes y edios de corriente y voltaje
estacionario.
[image:16.595.178.442.374.501.2]onsiderando las diferentes C, se puede encontrar un onentes AC afectan el utiliza el símbolo <x(t)> ras que X y
x
(ˆt
)
indicaran17
2.4.1 FUNCIONES DE TRANSFERENCIA EN UNA FUENTE DE CONMUTACIÓN
La descripción básica del comportamiento de un convertidor DC-DC ante las diferentes perturbaciones la describen funciones de transferencia que relacionan las diferentes variables involucradas en el sistema, a continuación se presentan brevemente las diferentes funciones de transferencia deducidas del diagrama de bloques de la figura 8.
⇒
G
vg(s
)
Describe como las variaciones en el voltaje Vg de entrada generan fluctuaciones en el voltaje V de salida, se obtiene haciendo d(s)=0.0 ) ( ˆ ) ( ˆ ) ( ˆ ) ( = = s d vg s g V s V s G [2.4.5]
⇒ Gvd(s)Describe como las variaciones en el ciclo útil generan variaciones en el voltaje de salida. 0 ) ( ) ( ˆ ) ( ˆ ) ( = = s Vg vd s d s V s G [2.4.6]
⇒ Zout indica como las variaciones en la corriente de carga generan variaciones en el voltaje de salida: 0 ) ( ) ( ) ( ˆ ) ( ˆ ) ( = = = s d s Vg load s i s V s Zout [2.4.7]
18 Figura 8: Diagrama de una fuente de conmutación considerando las diferentes funciones de transferencia
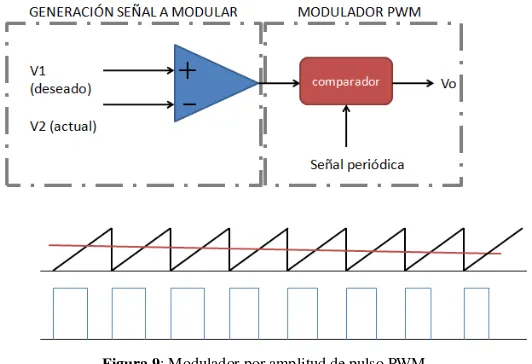
2.5 MODULADOR DE ANCHO DE PULSO PWM
La generación de la señal de control de los interruptores se obtiene a partir de un modulador de ancho de pulso PWM, el cual es implementado por un amplificador que realiza la comparación entre una señal de referencia conformada por una onda triangulo o diente de sierra, y la señal que se desea modular.
Figura 9: Modulador por amplitud de pulso PWM
La expresión que relaciona el ciclo útil de la señal de salida con la señal de entrada se obtiene a partir del valor máximo Vst de la señal de referencia y el valor instantáneo de la señal de entrada,
denominada en este caso Vcontrol.
ST s
on
V
Vcontrol
T
t
D
[image:18.595.180.446.380.562.2]ˆ
=
=
[2.4.8]
2.6 CONTROL DE UNA FUENTE DE CONMUTACIÓN
19 características de gran valor como minimizar el error en estado estable, tener una rápida capacidad de respuesta ante los cambios en las condiciones de operación, minimizar el valor del sobrepico en los transitorios, y disminuir la susceptibilidad al ruido entre otros[3].
A pesar de que se pueden obtener las funciones de transferencia para las diferentes variables (Vg, R, D), la única sobre la cual se puede actuar es el ciclo útil, tal como se ilustro en la figura 8, a partir de esta figura se establece la ganancia del lazo cerrado como:
) ( ) ( ) ( ) ( )
(S H S G S G S G S
T = ⋅ C ⋅ vd ⋅ M
[2.5.1]
Al realizar un análisis minucioso del sistema ilustrado en la figura 8 y de la expresión 2.5.1 se pueden encontrar algunos efectos como consecuencia de la realimentación:
• La realimentación reduce las funciones de transferencia de los disturbios: Las ecuaciones de las funciones de transferencia que relacionan las variaciones de Vg y de Il con Vo, lo cual minimiza los efectos que estas variaciones puedan tener sobre el voltaje de salida del conversor.
) ( 1 ) ( ) ( ˆ ) ( ˆ s T S G s v s v vg g + =
)
(
1
)
(
)
(
ˆ
)
(
ˆ
s
T
S
Z
s
i
s
v
out load+
=
−
[2.5.2]• Realimentación hace insensible la función de transferencia general a cambios en la ganancia del lazo cerrado: la función de transferencia para el sistema con retroalimentación negativa y sin considerar las variaciones en el voltaje de entrada y la corriente de carga esta dada por:
)
(
1
)
(
)
(
ˆ
)
(
ˆ
s
T
s
T
s
i
s
v
load+
=
−
[2.5.3]Por lo cual si la ganancia del lazo cerrado es mucho mayor que 1, es válido realizar la siguiente aproximación:
Si
T
>>
1
entonces)
(
1
)
(
1
)
(
)
(
ˆ
)
(
ˆ
s
H
s
T
s
T
s
v
s
v
REF≈
+
=
[2.5.4]Lo cual indica que las variaciones en GM(S),Gvd(s),GC(S) no tienen efecto en el valor del voltaje de salida.
2.7 CRITERIO DE ESTABILIDAD DE MARGEN DE FASE Y MARGEN DE GANANCIA
20 inicialmente se encontraban en el semiplano derecho sean llevados al semiplano izquierdo, esto como consecuencia de la ganancia en el lazo de realimentación.
Para garantizar la estabilidad total del sistema se debe puede acudir a cualquiera de los criterios existentes en la temática de control, uno de estos es el criterio del margen de ganancia y fase.
2.7.1 Margen de ganancia
En términos prácticos el margen de ganancia es una medida de la estabilidad relativa de un sistema realimentado, y se define como el reciproco de la ganancia de lazo cerrado T(s), para s=jw, para el
valor de frecuencia en el cual la fase de la ganancia en cuestión alcanza el valor de -180º, este valor indica que tanto se puede aumentar la ganancia de un sistema antes de que se altere su estabilidad. [4]
=| ( )| [2.7.1]
Evaluando f en el valor donde la fase de < ( = 2 )=0
2.7.2 Margen de fase
Una medida alternativa se puede definir a partir del margen de fase, es cual se presenta como la fase adicional que debe tener un sistema antes de que sea inestable, su cálculo se reduce al valor resultante de la adición 180º y el valor de fase de la ganancia de lazo cerrado para s=jW, considerando el valor de W a partir de la frecuencia fc o frecuencia crossover en la cual la ganancia del sistema es unitaria o 0dB. [4]
= 180º+< ( = 2 &)
[2.7.2]
La estabilidad en general del sistema la podemos definir a partir del margen de fase, ya que cuando este valor resulta ser mayor que cero se concluye que el sistema no posee polos en el semiplano derecho, y por lo tanto resulta ser estable.
2.8 ACCIONES BASICAS DE CONTROL PARA UN CONVERSOR
Para un sistema conformado por un conversor Dc-Dc se pueden realizar acciones de control tan complejas como se requieran, o algunas usualmente implementadas con los son acciones de carácter proporcional integral o derivativo. La elección del controlador y el cálculo no son un procedimiento único, ya que se debe asociar a las características deseadas en el sistema teniendo en cuenta el modelo de la planta, las bondades de un sistema de control realimentado, y los efectos de las diferentes acciones de control que se puedan tomar.
2.8.1 CONTROLADOR PD
21 controlador también es llamado plus proporcional derivativo o en altas frecuencias PD, el zero del sistema es quien causa el incremento de la ganancia del lazo para las frecuencias ubicadas entre Fz y fc, tal como se ilustra en la figura 10.
'( ) = ' (1 + ())
(1 + (*)
[2.8.1]
Figura 10: Diagrama de bode de la función T(s) correspondiente a la ganancia de lazo cerrado con un controlador PD
2.8.2 CONTROLADOR PI
Este tipo de controlador es utilizado para aumentar la ganancia del sistema en frecuencias menores que la frecuencia de ganancia unitaria Fc, para ello se agrega un polo en el origen al sistema y un cero que contrarreste el efecto en fase del polo a una frecuencia determinada de esta forma se busca garantizar que no se afecte la estabilidad del sistema. Al implementar el controlador PI la ganancia para una frecuencia W=0 es infinita idealmente y por lo tanto el error en estado estable será cero, en la implementación esta ganancia es bastante grande mas no infinito.
La función de transferencia del controlador PI está definida como:
+( ) = +,∙ -1 +.0/1 [2.8.2]
Figura 11 : Diagrama de bod
2.8.3 COMPENSADOR P
Las ventajas del compensador y cero error en estado estable derivativo “PID”, el cual en b el compensador introduce fase
El polo en la frecuencia FL frecuencia Fz adiciona fase en polos de alta frecuencia Fp1 y altos en altas frecuencias y así
2.9 SISTEMA DE CONTR
Un sistema de control en tie cambiar solo para valores dis controlador un sistema digital conversión de las variables a general un sistema de control d
F
Las señal de salida y de entra utilizando un dispositivo dig
ode de la función T(s) correspondiente a la ganancia de lazo cerrado c
PID
or en PI y el PD pueden ser combinadas para obten ble, a esta acción de control se le conoce como c
bajas frecuencias integra la señal de error, mientra ase en adelanto en el lazo de ganancia, mejorando e
&( ) = &3( ) - 4
56 71- 4897 1
- 48:67 1- 48:<; 1[2.8.3]
L funciona de la misma manera que en el contro en adelanto en las cercanías de la frecuencia de ga 1 y Fp2 deben estar presentes en la práctica para ev
así prevenir un ripple que afecte el funcionamiento
TROL DIGITAL
tiempo discreto es aquel sistema en el cual una o discretos de tiempo [5], y en general cualquier si tal se convierte en un sistema en tiempo discreto ya a un estado digital de tal forma que sean aptas pa ol digital se puede ilustrar de la siguiente forma:
Figura 12: Diagrama general de un sistema de control digital
trada a la planta son continuas, y dado que el con igital, se hace necesario utilizar un conversor di
22 o con un controlador PI
tener gran ancho de banda controlador proporcional tras que en alta frecuencia o el margen de fase.
trolador PI. El cero a la ganancia unitaria Fc. Los evitar valores de ganancia to de la señal de PWM.
a o más variables pueden sistema que utilice como ya que se debe realizar la para el procesamiento, en
[image:22.595.128.498.606.705.2]23 interacción entre el controlador y la planta, de la misma forma las señales provenientes del sensado de la salida de la planta y de la referencia deben ser digitalizadas de forma tal que puedan procesarse en el dispositivo digital.
2.10 TRANSFORMADA Z
La transformada Z es una herramienta que permite el análisis de las señales y los sistemas en tiempo discreto, de forma análoga a la transformada de laplace en señales análogas y en los sistemas en tiempo continuo. La transformación es válida para una secuencia de valores o señales en tiempo continuo pero solo considerando los valores muestreados de dicha señal a partir de una señal.
En general la trasformada Z de una señal o de una secuencia está dada por:
∑
∞ =−
=
=
=
0
)
(
)]
(
[
)]
(
[
)
(
K
k
z
kt
x
kt
x
Z
t
x
Z
Z
X
, para una señal en tiempo continuo[2.10.1]
∑
∞ =−
=
=
0
)
(
)]
(
[
)
(
K
k
z
k
x
k
x
Z
Z
X
, para una secuencia[2.10.2]
En este capítulo se presentan e implementación de fuentes d especificar de forma concreta forma precisa cada uno de los
3.1 ESPECIFICACIONES
De forma general es posible in los procesos relacionados con a que dicha herramienta cuen usuarios analizar, clarificar y v La herramienta desarrollada e documentación, de los cuale ordenada de los diferentes co conmutación, dando lugar a aprendizaje que se sugieren en Los documentos perteneciente presenta en formato digital herramienta de programació programación para el DSP32 hardware que permiten realiz implementación de un convert y control digital.
Los elementos mencionados presenta en dos módulos, configuración y programación de la temática de fuentes de c la realización de experiencias En la figura 13 se ilustra un división de la herramienta en d para la realización de experien
Figura13: Diag
3 ESPECIFICACIONES
n las especificaciones logradas por la herramienta s de conmutación, partiendo desde lo más general ta cada uno de los elementos que la componen, con os alcances obtenidos en el prototipo final.
ES GENERALES DE LA HERRAMIENTA
e indicar que se implemento una herramienta que se on el aprendizaje y la implementación de convertido
uenta con recursos validos e ilustrativos, que per y verificar conceptos relacionados con la temática d a está conformada principalmente por elementos d ales algunos se diseñaron y otros se integraron conceptos y técnicas involucradas en la temátic a la verificación de lo presentado en las dife en los diferentes documentos.
ntes a la herramienta se presentan en formato PDF
tal conformado por archivos fuente y proyecto ción CODE COMPOSER STUDIO correspon
320F28335 de TEXAS INSTRUMENTS, y finalm
alizar diferentes experiencias de aprendizaje en l ertidor buck en tres modalidades: control en malla
s se han ordenado y dispuesto de tal forma que , el primero corresponde en su totalidad el ión del DSP, mientras el segundo corresponde a la e conmutación; cada uno de los módulos integra di as de aprendizaje como culminación de cada módul un diagrama general de la herramienta, en la cua n dos módulos, y la disponibilidad de los diferentes iencias de aprendizaje planteadas en cada módulo.
iagrama general de la herramienta de apoyo al aprendizaje e implemen de fuentes de conmutación
24 ta de apoyo al aprendizaje al de la herramienta, hasta con el fin de ilustrar así de
se muestra como útil para tidores Dc-Dc, esto debido permiten a los eventuales
a de interés.
s de hardware software y on para una presentación tica global de fuentes de iferentes experiencias de
F, mientras el software se
ctos desarrollados en la ondientes a rutinas de almente los elementos de n las cuales se realiza la lla abierta, control análogo
ue la herramienta final se l entrenamiento para la la presentación en general diferentes elementos para
ulo.
cual se puede observar la tes elementos de hardware
3.2 TEMATICAS PRESE
Los diferentes elementos desa y verificar conceptos relaciona 1. la configuración, prog
Instruments.
2. La temática global de con un enfoque espe teórico-práctica con lo temáticas se indican a
• Sistema de pr • Fuentes de co • Moldeamiento • Sistema de co
3. La medición de la fu controlador análogo P La presentación de las temátic aunque se presentan en docum implementación de aplicacion
3.2.1 Módulo Entrenamien
El módulo de entrenamiento p y está conformado por un ma digital de señales y en forma los diferentes registros para la dos prácticas de laboratorio do herramienta CODE COMPOS
Figura14: D
Las practicas prácticas o exp para el uso del DSP se especif
• Entrenamiento 1: Est
se realiza la presentac permite al usuario el d generación de señales programa principal.
SENTADAS
esarrollados permiten que la herramienta final, sea onados con:
rogramación del procesador digital de señales D
de fuentes de conmutación o conversores Dc-Dc, pecial en la topología Buck, esto con el fin de p
lo realizado en las diferentes experiencias de apre n a continuación:
procesamiento de potencia
conmutación en estado estacionario
nto y control de una fuente de conmutación control digital y relación entre los planos S y Z.
función de transferencia de un sistema de un co PI, utilizando un analizador de redes.
ticas mencionadas se realiza en los módulos que co umentos por separado, y están relacionados y enfoc ones sobre el hardware que compone la herramienta
iento DSP
o para el manejo del DSP es presentado en un docu arco de referencia en el cual se realiza una introd a específica se relaciona la arquitectura del DSP3 la configuración y programación del dispositivo, e documentadas que permiten la programación del d
OSER STUDIO.
: Diagrama general del módulo de Entrenamiento para el manejo del D
xperiencias de aprendizaje del módulo correspond cifican a continuación:
sta práctica propone realizar diferentes procedimie tación de la herramienta de programación CODE C
el desarrollo de un primer programa o proyecto el les de PWM con un ciclo útil variable por medio d
25 ea utilizada para presentar
DSP320F28335 de Texas
c, de forma muy general e permitir una asociación prendizaje, las principales
convertidor Buck con un
componen la herramienta, focados directamente en la nta.
cumento en formato PDF, roducción a un procesador P320F28335, presentando , este módulo finaliza con el dispositivo utilizando la
el DSP
ondiente al entrenamiento
mientos durante los cuales
COMPOSER STUDIO, le
• Entrenamiento2: Esta
programa en el cual se la cual es posible mo primera práctica por in digital.
3.2.2 Módulo fuentes de co
El módulo de fuentes de conm temática de fuentes de conmu de procesamiento de potencia fuente de conmutación.
Figu
En la figura 15 se ilustra el d puede observar que cada cap conceptos presentados previam que dispone la herramienta.
3.2.2.1 Capitulo 1 “Fuentes
En este documento se presen considerando sus puertos pri introducción a la temática de l Posteriormente se realiza el características de las diferente mencionado.
sta práctica tiene como base a “entrenamiento 1”, l se hace uso del periférico ADC del DSP, generand modificar el valor del ciclo útil de las señales de
r intermedio de una entrada de voltaje análoga capt
conmutación
onmutación está dividido en cuatro capítulos, en lo utación de manera ordenada, partiendo del concep cia, y finalizando con la temática de un controlador
igura15: Diagrama general del módulo de Fuentes de conmutación
l diagrama general del módulo de fuentes de con capítulo finaliza con una práctica, la cual se de iamente y con apoyo de los diferentes elementos
tes en estado estacionario”
senta el concepto general de un sistema de proc principales y la funcionalidad de cada uno de el
e las fuentes de conmutación.
el análisis de la topología buck en estado estac ntes señales de corriente y voltaje que presenta el
26 ”, en ella se desarrolla un ando así una aplicación en de PWM generadas en la apturada por el dispositivo
n los cuales se presenta la cepto básico de un sistema dor digital básico para una
onmutación, en el cual se desarrolla a partir de los s de hardware y software
rocesamiento de potencia, ellos, realizando así una
Figura16
Este módulo finaliza con una de hardware diseñada, en ella control), visualizando la señal los mosfets, con el fin de DSP320F28335, para la gener También dicho módulo cuenta de PWM con ayuda de una tar
3.2.2.2 Capitulo 2 “Moldeam
En este capítulo se realiza presentando así las temáticas sistema con control realime transferencia de un conversor,
Figura17
La parte final del capítulo es hardware diseñada en la cual s la funcionalidad del control, e el conversor y en el control.
3.2.2.3 Capitulo 3 “Impleme
Este documento incluye la pr son los elementos principales equivalencia entre los planos PID de la librería DCM del DS controlador digital.
6: Diagrama funcional de las experiencia correspondiente al capítulo
na práctica documentada paso a paso, la cual se rea ella se implementa una fuente de conmutación Bu ñales de corriente sobre la inductancia y las señales
e incorporar dispositivos digitales de última ge eración de las señales de PWM utilizadas en la prác nta con una segunda práctica alternativa en la cua tarjeta análoga la cual fue diseñada para este propós
amiento y control de una fuente de conmutación
a la deducción del modelo de pequeña señal d cas involucradas como el operador promedio móv mentado de una fuente de conmutación, las d or, y el cálculo de un controlador funcional para un
7: Diagrama funcional de las experiencia correspondiente al capítulo
está conformada por una práctica de laboratorio al se implementa una fuente buck con control PI an l, e identificando las características de las principal
mentación de un controlador digital para un con
presentación de las temáticas relacionadas con el es de un sistema de control digital, la transformada os S y Z, entre otros, adicionalmente se realiza la DSP320F28335, con el fin de hacer uso de ella par
27 lo 1
realiza sobe la plataforma Buck en lazo abierto (sin les de PWM que controlan generación se utiliza el
ráctica.
ual se generan las señales pósito.
ión”
l de un conversor buck, óvil, la deducción de un diferentes funciones de un conversor DC-DC.
lo 2
io sobre la plataforma de análogo, corroborando así pales señales de interés en
onversor DC-DC”
Figura18
En la práctica de este capítul especializado de la librería D implementado en el capitulo a manejo del DSP.
3.2.2.4 Capitulo 4 “Medició un analizador de redes”
En este documento presenta e para la medición de la func documento de plantea la como convertidor de topológica Buc
3.3 Especificaciones de sof
Los elementos de software est COMPOSER STUDIO para la Los diferentes archivos en C+ el código faltante y obteniend requeridos para la programació
• Entrenamiento1.c: E diferentes documento que permita programa ciclo útil variable y un • Entrenamiento2.c: A para la generación de por el DSP a partir de • Entrenamiento3.c: E constantes necesarias archivo fuente se gene de un controlador PI d Los elementos de software re cuales corresponden a las solu
8: Diagrama funcional de las experiencia correspondiente al capítulo
ítulo se implementa un controlador PI digital con DCM, para ello se recurre a la discretizaciòn del o anterior, y a los programas desarrollados durante
ción de la función de transferencia de un conver
ta el principio de funcionamiento del analizador d nción de transferencia de un convertidor Dc-Dc mo experiencia de aprendiza la medición de la func
uck, implementado con el control PI análogo.
software
están conformados por diferentes archivos en C++ a la programación del DSP.
C++ permiten utilizarse como plantilla para que los endo así un archivo fuente para la generación de l
ción del procesador digital de señales.
: Este archivo le permite al usuario de la herram tos, la generación de un archivo fuente para el de mar el DSP320F28335 para generar dos señales de un tiempo muerto entre sí.
: Al completar este archivo el usuario podrá utilizar de un proyecto que modifica el ciclo útil de una s de una señal de voltaje capturada por el ADC. : Este archivo debe ser complementado por el usu ias para la implementación de un controlador PI
enera un proyecto con el cual se programa el DSP I digital para una fuente de conmutación.
restantes pertenecen a 3 proyectos en CODE COM
oluciones de los ejercicios planteados en las diferen
28 lo 3
on ayuda del bloque PID el controlador PI análogo te el entrenamiento para el
vertidor Buck utilizando
r de redes y su aplicación Dc, en la parte final del unción de transferencia del
++ y proyectos EN CODE
os usuarios complementen e los diferentes proyectos
amienta con ayuda de los desarrollo de un proyecto de PWM de 20KHz, con
zarlo como archivo fuente a señal de PWM generada
usuario con las diferentes I digital, a partir de este P para la implementación
OMPOSER STUDIO los
proyectos se incluyen los com uno de los interrogantes plante • Entrenamiento1.prg
solución de lo plan programación del DSP
• Entrenamiento2.pgr segunda practica de en • Entrenamiento3.prg
del módulo de fuente ayuda de la librería de
3.4 Especificaciones de Ha
El hardware desarrollado para lograr una integración con ot desarrollado por los ingeni “Implementación de un contr
Dentro de las tarjetas desarrol buck, una tarjeta que permite PWM de ciclo útil variable, diferentes circuitos de polariza La integración de las tarjetas permite realizar las diferentes especial la implementación de
3.4.1 Tarjeta de Potencia
Esta tarjeta está conformada p o discontinuo, a partir de u visualizar señales de interés co otras.
Este elemento es integrable co logra la implementación de un
omentarios a los archivos fuente indicando claram nteados en la plantilla básica de cada practica. rg: Es un proyecto en CODE COMPOSER STU lanteado en la primera práctica de entrenamien
SP320F28335.
gr: Es el proyecto correspondiente a la solución entrenamiento para el manejo y programación del D rg: Es el proyecto solución para el ejercicio propue ntes de conmutación, en el se implementa el con de control digital de motores de CODE COMPOSE
Hardware
ara la implementación de la herramienta se diseñó otros elementos utilizados pertenecientes al siste enieros Arturo Fajardo y Fernando Ojeda en
ntrolador digital para un motor de inducción trifás
rolladas se encuentra una tarjeta de potencia confo te la implementación de un control análogo o la gen
, y una tarjeta de fuentes que proporciona la ali ización de la tarjeta de potencia.
as desarrolladas con el sistema lego de potencia m tes prácticas de laboratorio indicadas en los difere de sistemas de control análogo y digital para el con
por un convertidor Buck, el cual se puede implem una configuración previa en el hardware, la t s como la corriente en la inductancia, las señales de
Figura19: Diagrama funcional de la tarjeta de potencia
con el sistema lego de potencia referenciado anter un controlador digital en el DSP320F28335, de igu
29 amente la solución a cada
TUDIO corresponde a la iento para el manejo y
ón de lo planteado en la el DSP320F28335.
uesto en el tercer capítulo controlador PI digital con
SER STUDIO.
ó de forma modular para istema “lego de potencia” en su tesis de maestría
ifásico” [6]
formada por un conversor generación de una señal de imentación DC para los
mencionado previamente ferentes documentos, y en
onvertidor diseñado.
ementar en modo continuo a tarjeta también permite de control de PWM, entre
análoga desarrollada especific sistema de control análogo par
3.4.2 Tarjeta de Control a
Dentro de los elementos de requerimientos, en primer luga con un ciclo útil variable, la controlador análogo PI, para e
F
3.4.3 Tarjeta de Fuentes D
Dentro de los elementos de ha los diferentes elementos de la AC de potencia de 24VAC, tensión requeridos y regulada
ificada en el numeral 3.4.2 con la cual se logra la para la topología Buck.
l análogo
de hardware se desarrolló una tarjeta análoga la ugar la posibilidad de generar dos señales de PWM la segunda funcionalidad de la tarjeta está en la
el convertidor buck perteneciente a la tarjeta de po
Figura20: Diagrama funcional de la tarjeta de control análogo
s DC
hardware se desarrollo una tarjeta de fuentes DC la la tarjeta de potencia, dicha tarjeta es alimentada p , esta señal de alimentación es transformada a lo da para generar un valor preciso de voltaje continuo
30 la implementación de un
la cual cumple con dos M (una negada de la otra), la implementación de un
potencia.
31
4 DESARROLLOS
En el proceso de diseño e implementación de la herramienta se desarrollaron los elementos básicos que la componen:
• Hardware
• Software
• Documentación.
Dado que el objetivo del trabajo realizado esta enmarcado en la generación de una herramienta válida para el apoyo al aprendizaje y la implementación de fuentes de conmutación, se hizo necesario un estudio y análisis previo de temáticas relacionadas con teorías y procesos de aprendizaje, lo cual sirvió como base para la elección de los diferentes contenidos presentados en cada módulo, el orden de presentación y el diseño las prácticas desarrolladas al final de cada capítulo.
A nivel de hardware se diseñaron los elementos como tarjetas de potencia, control análogo, y fuentes, las primeras dos están físicamente distribuidas de manera muy similar a lo ilustrado en un diagrama de flujo o de bloques, esto con el fin de identificar y visualizar de manera fácil señales de interés en cada uno de los elementos de hardware, mientras que la tarjeta de fuentes no se ilustra en los diagramas de bloques ya que no tiene relación alguna en la asociación de planta con un control.
4.1 Documentación de la herramienta
Para la implementación de la herramienta fue necesario redactar los diferentes documentos pertenecientes a cada uno de los módulos que se especificaron previamente, para lo cual se diseño un formato estándar que permitiera la presentación de cada una de las temáticas involucradas en cada módulo, partiendo desde una breve introducción y presentación para el usuario, seguido de la teoría presentada y finalizando con cada una de las experiencias de aprendizaje realizadas sobre la plataforma de hardware.
4.1.1 Formato estándar de la documentación de la herramienta
En búsqueda de un formato estándar y optimo para la documentación de la herramienta, y teniendo en cuenta los estudios de las teorías de aprendizaje se opto por que cada uno de los documentos desarrollados fueran presentados de forma digital en formato PDF, y siguiendo la estructura que se describe a continuación:
a. Portada: En ella se presenta un titulo que define el contenido global del documento,
adicionalmente se indica a que módulo corresponde el escrito actual.
b. Introducción: Le indica al lector cuales son las temáticas contenidas en el documento en
curso, también se dan a conocer la inclusión de una o más experiencias de aprendizaje al final del documento, haciendo énfasis en la relación directa de lo presentado en la lectura con lo previsto para el desarrollo de cada practica.
c. Metodología: Aquí se presenta la metodología elegida en el diseño de la herramienta,
básicamente para la realización de las diferentes experiencias de aprendizaje, este apartado es el mismo para cada documento.
32 d. Requerimientos de Equipos: En este apartado se indican los equipos necesarios para realizar
la experiencias de aprendizaje sugeridas en el final de cada módulo.
e. Marco de Referencia: Esta conformado por una presentación ordenada e ilustrativa de las
diferentes temáticas que conforman cada uno de los documentos, los conceptos y ejemplos que se indican allí están directamente relacionados con los procedimientos realizados en el las diferentes experiencias de aprendizaje planteadas.
f. Guías de Laboratorio: Comprende la presentación y el acompañamiento de la experiencia de
aprendizaje diseñada para el documento en curso, cada guía inicia con una breve introducción a la práctica o experiencia a realizar sobre la plataforma, también se realiza la presentación de los objetivos generales y de aprendizaje, seguido de los diferentes procedimientos como medidas y cambios que se deben realizar, finalmente se plantean una serie de preguntas, con las cuales se espera que el usuario de la herramienta reflexione a partir de lo observado en la práctica con lo esperado e ilustrado a nivel teórico, generando conclusiones que lo lleven a clarificar los conceptos generales de convertidores en especial de la topología buck.
g. Bibliografía: Los libros artículos y demás fuentes utilizadas en cada documento se citan
debidamente en este apartado.
4.1.2 Diseño del módulo de entrenamiento del DSP
Dada la amplia funcionalidad en diversas aplicaciones de un elemento como el DSP320F28335, y considerando elementos de apoyo para su programación como manuales y tutoriales, se opto por que los documentos y practicas relacionadas con el entrenamiento y aprendizaje para el uso del dispositivo en cuestión, tuvieran un enfoque de control para sistemas de procesamiento de potencia, específicamente lo requerido para el control de un convertidor DC-DC.
Teniendo en cuenta las consideraciones mencionadas se diseño un documento el cual presenta los principales módulos y/o periféricos del DSP, indicando de manera resumida, la forma de configurar los diferentes registros del procesador involucrados en la generación de señales de PWM, el uso y manejo de interrupciones generadas por el periférico ADC, y la implementación de un controlador digital para un convertidor DC-DC.
En la primera experiencia de aprendizaje presentada en la finalización del módulo se realiza la introducción a la herramienta de programación CODE COMPOSER STUDIO realizando un
acompañamiento continuo respecto a los procedimientos necesarios para la generación de un proyecto en el cual se generen dos señales de PWM con un ciclo útil variable por medio de la programación del dispositivo.
La segunda experiencia de aprendizaje tiene como punto de partida el proyecto desarrollado en la primera guía, dado que se incorpora el uso del periférico correspondiente al conversor análogo digital del DSP, para modificar el ciclo útil de dos señales de PWM, a partir de una entrada de análoga de voltaje capturada por el dispositivo digital.
4.1.3 Diseño del módulo de fuentes de conmutación
El módulo de fuentes de conmutación se dividió en 3 capítulos, con el fin de presentar las temáticas de forma corta y sencilla, permitiendo así el desarrollo de experiencias de aprendizaje que estén relacionadas únicamente con los conceptos presentados en el capitulo respectivo.
33 de un modelo de pequeña señal para un convertidor, el diseño de un controlador funcional, y finalmente la inclusión de elementos de procesamiento digital para la implementación de un controlador digital. A partir de los temas indicados se diseñaron cuatro experiencias de aprendizaje las cuales son de gran importancia en la herramienta, ya que en ellas se verifican los conceptos presentados en el marco de referencia de cada capítulo y se generan en el usuario dudas relacionadas con necesidades propias del sistema implementado, las cuales serán resueltas en capitulo siguiente.
4.1.3.1 Implementación de la topología Buck en malla abierta
Los conceptos presentados en el primer capítulo del módulo de fuentes de conmutación requerían de una práctica que permitiera verificar conceptos tales como la relación entre el voltaje de entrada y el voltaje de salida de un convertidor Dc-Dc, las características de las principales señales de interés, y los diferentes modos de funcionamiento.
Para cumplir con los requerimientos planteados se opto por diseñar una experiencia de aprendizaje en la cual se implementara la topología buck en malla abierta, con lo cual es posible verificar la relación entre el voltaje de entrada y el de salida del convertidor, también con ayuda del hardware utilizado en este caso la tarjeta de potencia es posible visualizar las señales de corriente y de voltaje en la inductancia y el condensador respectivamente, lo cual permite también observar fácilmente el fenómeno de modo continuo y discontinuo para el convertidor buck, finalmente el emular variaciones en el voltaje de entrada del conversor permiten concluir como no valido el uso de un sistema de control en malla abierta para un convertidor.
La implementación de la topología buck en malla abierta puede realizarse en dos practicas diferentes, en la primera se utiliza el DSP320F28335 como elemento de generación de señales de PWM con ciclo útil variable, mientras que el convertidor fue implementado con ayuda de la tarjeta de potencia
incluida en los desarrollos de hardware alcanzados durante el presente trabajo.
La segunda práctica diseñada difiere de la primera en el elemento utilizado para la generación de las señales de PWM, ya que se hace uso de una tarjeta de control análogo diseñada para tal fin, en la cual se modifica el ciclo útil de la señal de salida con la variación de un potenciómetro lineal P1.
4.1.4 Implementación de la topología Buck con control PI análogo.
En el segundo capítulo del módulo de fuentes de conmutación se presentaron conceptos relacionados con el moldeamiento de convertidores en AC utilizando la técnica del operador promedio móvil, se presento un convertidor Dc-Dc como un sistema realimentado en el cual se controla el voltaje de salida manipulando el ciclo útil de la señal de control, finalmente se presentaron las diferentes funciones de transferencia presentes en el sistema y las principales acciones de control como son PI, PD, y PID; por todo la anterior se requería diseñar una experiencia de aprendizaje en la cual se implementara un control funcional para el convertidor buck utilizado en el primer capítulo, por lo cual se diseño una práctica en la cual se integrara a la tarjeta de potencia una tarjeta de control análogo en la cual se implementa un controlador PI para la topología buck.
34 La práctica finaliza proponiendo la viabilidad de cambios en los valores del controlador PI, y la posibilidad de configurar la referencia del sistema de control con gran precisión esto con el fin de destacar características poco deseadas en la implementación de un sistema de control.
4.1.5 Implementación de un controlador digital para la topología Buck utilizando el procesador digital de señales DSP320F28335
[image:34.595.189.437.317.504.2]En el capítulo final del módulo de fuentes de conmutación se presentan brevemente conceptos relacionados con el control digital, y el uso en el DSP de bloques dedicados a la implementación de controladores PI digitales, así como la estructura básica del proceso de implementación de un controlador digital usando un dispositivo de programación como un DSP, por lo cual la experiencia de aprendizaje se diseño considerando la equivalencia entre el plano S y Z, lo que llevo a proponer inicialmente la obtención por métodos diferentes de una función de transferencia en Z equivalente al controlador análogo implementado en el segundo capítulo del mismo módulo, a partir de este cálculo se utilizan los programas desarrollados en el módulo correspondiente al entrenamiento para la configuración y programación del DSP como base para la implementación de un controlador digital PI para el convertidor buck.
Figura 2: Implementación de la topología Buck con un sistema de control digital integrando la plataforma de hardware y software
Durante la práctica se verifica la funcionalidad del controlador digital y se destacan algunas ventajas de este tipo de control realizando de forma sencilla ajustes en las constantes del controlador y se modifica a un valor decimal de gran precisión el valor de referencia del controlador digital.
4.2 Desarrollos de Hardware
En este numeral se describen los desarrollos a nivel de hardware, los cuales están conformados por tarjetas de control análogo, de procesamiento de potencia, y fuentes, allí se indican los criterios de selección para la implementación de una solución en cuanto a hardware concierne, justificando el uso de diferentes componentes, y presentado diagramas de bloques que ilustren las etapas que conforman cada uno de los elementos desarrollados.
35 requeridas entre los diferentes componentes no se podían lograr en una sola capa, lo cual se aprovecho para introducir planos de tierra, y así minimizar el ruido que se genere y se introduzca en cada uno de los circuitos.
Algunas de las características a destacar en los elementos de hardware desarrollados esta en los diferentes conectores utilizados, en el caso del suministro de las fuentes de polarización, se utilizaron conectores tipo molex, de diferentes tamaños para evitar confusiones en la conexión, mientras en el caso de las señales digitales y de medida se utilizaron conectores de cinta plana cuya numeración se puede verificar físicamente en el circuito, por último los puertos de potencia como son los correspondientes al voltaje de entrada y salida del conversor buck se implementaron adaptando al circuito impreso conectores hembra tipo banana, en los cuales se puede identificar claramente la polaridad de cada puerto.
Por otra parte la distribución de los componentes en los diferentes circuitos impresos se realizó teniendo en cuenta no solo segmentos de alta y baja potencia, sino también se trato de obtener físicamente una distribución similar a lo ilustrado en los diferentes diagramas de bloques que describen la funcionalidad de cada circuito. Igualmente dado el enfoque pedagógico de la herramienta se incluyeron puntos de prueba para la visualización de las diferentes señales de interés, y elementos como jumpers y switches para la realización de cambios rápidos en la funcionalidad de cada una de las tarjetas diseñadas.
4.2.1 Tarjeta de Potencia
[image:35.595.136.497.510.561.2]Como se menciono previamente se opto enfocar la herramienta al análisis de una sola topología, por lo cual a nivel de hardware se requería la implementación de un convertidor buck, pero dicho elemento debía ser integrable con el sistema del DSP320F28335, y con una tarjeta de control análogo, además debía permitir manipular el circuito de forma manual con el fin de implementar el conversor con dos mosfets, o un mosfet y un diodo para la implementación de un convertidor en modo continuo o discontinuo respectivamente, también debía garantizarse un sistema de sensado de variables como la corriente en la inductancia y el voltaje en el condensador de salida garantizando un aislamiento eléctrico como protección para los elementos con los que se iba a interconectar dicha tarjeta.
Figura 23: diagrama en bloques de la tarjeta de potencia.
Por lo anterior para la implementación de un sistema de potencia se consideraron tres etapas, la primera de ellas está conformada por el conversor buck, cuyos interruptores están manejados a partir de un sistema aislado conformado por dos optoacopladores 6N127, y un manejador IRF2110, los optoacopladores se seleccionaron por su rapidez, ya que iban a manejar señales de 20KHz, y el driver de los mosfets permite el manejo de dos transistores uno de ellos flotante, además posee una entrada de enable la cual se utilizo para la implementación de un sistema de protecciones.
La segunda etapa corresponde al sensado de las señales de corriente y voltaje correspondientes a la inductancia y el condensador respectivamente, seguido de un amplificador diferencial que permitiera el aislamiento eléctrico de la parte de potencia.
Para el sensado de la corriente en la inductancia se utilizo un una resistencia en serie de 0,015Ω
perteneciente a la serie de Ohmite, cuya señal de voltaje era tomada de forma diferencial por el
TOPOLOGIA BUCK
SENSADO V, I
36 amplificador HCPL-7800, fabricado Avago, este dispositivo se utilizo ya que permitía amplificar una señal diferencial y generar una salida aislada eléctricamente refería a una tierra diferente.
El sensado de voltaje en el condensador se realizó a partir de un divisor resistivo del cual se tomaba una señal de muestra y al igual que en el sensado de corriente se amplificaba y se aislaba la muestra con ayuda del amplificador diferencial HCPL-7800.
Finalmente en la tercera etapa las señales correspondientes a la muestra de voltaje y corriente en la inductancia se amplificaron y filtraron para frecuencias menores a 100KHz, para ello se utilizo el amplificador operacional LF411, al cual se le limito el ancho de banda adicionando un polo a la función de transferencia del amplificador.
Esta tarjeta es totalmente integrable con el sistema de control análogo desarrollado en este proyecto, mientras que para su integración con el sistema del DSP320F28335, se deben utilizar las tarjetas de adecuación de señales y expansión de puertos diseñadas pertenecientes al sistema lego de potencia, mencionado previamente.
Características principales de la tarjeta de potencia
• Convertidor buck de 15Wattios (sin controlador)
• Sistema de sensado y visualización de la corriente en la inductancia con una señal de salida diferencial en un rango de 0-10VDc.
• Sistema de sensado del voltaje del condensador del conversor buck, con señal de salida diferencial, entre 0 a 10 Vdc.
• Señales de PWM de 0-3V, para el control de la conmutación de los interruptores del conversor Buck.
[image:36.595.166.494.475.627.2]• Voltajes de polarización: 3,5,15 y 15 Vdc (Digital), 10, 5Vdc (potencia), y 5Vdc (flotante).
Figura 22: Tarjeta de potencia Buck
Las especificaciones generales del conversor buck implementado en la tarjeta de potencia son: • Voltaje de entrada: 25+-5VDC
• Voltaje de salida 5-15VDC • Potencia de salida 15W.
• Implementación en modo continuo y discontinuo seleccionable. • Limite modo continuo a discontinuo a 0.150 A.
![Figura 4: Modelo de un conversor DC-DC utilizando el modelo ideal del transformador [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/4287599.29737/14.595.142.484.363.432/figura-modelo-conversor-dc-utilizando-modelo-ideal-transformador.webp)
![Figura 7F: señal con componentes en alta baja frecuencia. [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/4287599.29737/16.595.178.442.374.501/figura-f-senal-componentes-alta-baja-frecuencia.webp)