INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
“REDUCCIÓN DE RUIDO EN SEÑALES MEDIANTE LA TRANSFORM ADA DE FOURIER EN TIEMPO REDUCIDO Y
ESPECTROGRAMAS”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTA:
ERIK YIDELL CARBAJAL DEGANTE
ASESORES:
M. en C. Eric Gómez Gómez Ing. Carlos Mira González
Dedicatoria y Agradecimientos.
P
or y para Dios.A mi familia en general. Especialmente a mi madre Lulú por ser la persona más fuerte que he conocido, mi ejemplo de dedicación, sacrificio y esfuerzo. Mi hermana Nazareth una gran fuente de orgullo y motivación. Mi tía Adela por sus enseñanzas. Mis abuelos su crianza y ahora desde el cielo. Por y para ustedes por su incondicional apoyo, amor y sobre todo paciencia.
A las personas queridas que me rodean y se sumaron a mi memoria. Mis amigas y amigos. Un honor haberles conocido, por su tiempo, amistad y demás, gracias.
A mis asesores y jurado, por la formación profesional, consejos y desde luego compromiso.
Por supuesto a mi escuela por el conocimiento intelectual y humano que me ha brindado. He aquí mi trabajo.
Erik Yidell Carbajal Degante. México D.F. Septiembre 2013
ÍNDICE GENERAL
Índice general……….. I
Índice de figuras……….. V
Objetivo………... VII
Introducción……… IX
Antecedentes………... XI
Capítulo 1. Señales y sistemas de comunicación……… 1
1.1 Definiciones básicas………. 2
1.1.1 Señales………. 2
1.1.2 Sistemas………... 2
1.1.3 Modelos………... 3
1.2 Señales y fuentes analógicas………. 4
1.3 Señales y fuentes discretas………... 4
1.4 Algunas clasificaciones de las señales………. 5
1.4.1 Señales multicanales y multidimensionales……… 5
1.4.2 Señales continuas o discretas en tiempo……….. 6
1.4.3 Señales continuas o discretas en amplitud………... 7
1.4.4 Señales periódicas o aperiódicas………. 8
1.4.5 Señales de longitud finita, semi-infinita o infinita……….. 8
1.4.6 Señales determinísticas o aleatorias……… 9
1.4.7 Señales de energía o de potencia………. 10
1.5 Sistema analógico de comunicación………. 12
1.5.1 Procesamiento analógico………. 13
1.6 Sistema digital de comunicación……….. 14
1.6.1 Procesamiento digital……….. 16
Capítulo 2. Teoría básica del ruido………. 19
2.1 El ruido………. 19
2.2 Clasificación del ruido…...………. 20
2.3 Relación señal a ruido……….. 21
2.5 Modelo AWGN……… 23
2.6 Técnicas para el tratamiento de ruido………... 24
2.6.1 Técnicas monocanal para el tratamiento de ruido……….. 25
2.6.2 Técnicas multicanal para el tratamiento de ruido………... 27
2.6.3 Método de umbral………... 28
2.6.3.1 Umbral fijo……… 29
2.6.3.2 Umbral suave………. 29
2.6.3.3 Porcentaje de umbral………. 30
2.7 Evaluación de la reducción de ruido………. 30
Capítulo 3. Análisis de señales………. 33
3.1 Algebra lineal……… 33
3.1.1 Espacios vectoriales………. 33
3.1.2 Campos y subconjuntos……… 33
3.1.3 Aplicaciones………. 35
3.1.4 Aplicaciones lineales……… 35
3.1.5 Productos escalares……….. 36
3.1.6 Ortogonalidad……….. 36
3.1.7 La componente “c”………... 37
3.1.8 Bases ortogonales………. 38
3.1.8.1 Teorema de Gram – Schmidt………. 38
3.1.9 La componente “c” vectorial……… 39
3.1.10 Ortogonalidad de funciones………. 40
3.2 Análisis de Fourier……… 41
3.2.1 Serie generalizada de Fourier…...……… 41
3.2.2 Condiciones de Dirichlet……….. 44
3.2.3 Serie exponencial de Fourier……… 45
3.2.4 Propiedades de la serie de Fourier……… 48
3.2.5 Espectro complejo……… 49
3.2.7 Invertibilidad………... 51
3.2.8 Condiciones de convergencia……….. 53
3.2.9 Propiedades de la transformada de Fourier………. 54
3.2.10 Integral de la convolución………... 55
3.2.11 Teorema de Parseval……… 56
3.2.12 Teorema de Plancherel……… 57
3.2.13 Relaciones entre dominios……….. 58
3.3 Principio de incertidumbre………. 60
3.3.1 Indeterminación de Heisenberg en la física cuántica………….. 61
3.3.2 Indeterminación en el análisis de Fourier……… 62
3.3.2.1 Duración efectiva y funciones de duración finita…… 63
3.3.2.2 Ancho de banda y funciones de ancho finito………... 64
3.3.2.3 Producto duración efectiva – ancho de banda………. 66
3.3.2.4 Señales absolutamente integrables……….. 66
3.3.2.5 Señales de energía finita……….. 68
3.4 Análisis de Fourier en ventanas……….. 71
3.4.1 La transformada de Fourier en tiempo reducido (STFT)……… 71
3.4.2 Invertibilidad. Fórmula de reconstrucción……….. 72
3.4.3 Efectos de ventaneo………. 74
3.4.3.1 Linealidad……… 74
3.4.3.2 Deslizamiento en tiempo………. 74
3.4.3.3 Deslizamiento en frecuencia……… 75
3.4.4 Ventana ideal.……….. 76
3.4.5 Transformación integral de Gabor……….. 79
3.4.6 Distribución de Wigner – Ville………... 79
3.4.7 Espectrogramas……… 80
3.4.8 Diseño de ventanas……….. 81
Capítulo 4. Procesamiento de señales y atenuación de ruido……… 85
4.1.1 Detección de señales………... 86
4.1.2 Función espectral en frecuencia………. 87
4.1.3 Función de gráfica espectrograma……….. 89
4.2 Construcción de gráfico………... 91
4.3 Tratamiento del espectrograma………... 95
4.3.1 Proceso de filtrado……….. 96
4.3.2 Proceso de reducción de ruido……… 97
4.3.3 Proceso de reconstrucción……….. 99
Capítulo 5. Implementación e interpretación de resultados………. 101
5.1 Implementación de los procesos……….. 101
5.2 Gráficas del ventaneo……….. 102
5.3 Tratamiento de señales como funciones matemáticas……… 103
5.3.1 Senoidal a 15 dB de SNR………... 103
5.3.2 Senoidal a 5 dB de SNR………. 105
5.3.3 Pulsos rectangulares a 13 dB de SNR……… 107
5.4 Tratamiento de señales de audio……….. 109
5.5 Tratamiento de señales de voz………. 112
5.6 Mediciones para una señal de prueba……….. 117
5.7 Interfaz gráfica de usuario………... 120
Conclusiones……….. 123
Trabajos a futuro……….. 124
Apéndice A. Análisis en dominios discretos………... 125
A.1 Bases discretas y serie de Fourier discreta 125 A.2 Transformada de Fourier en tiempo discreto (DTFT) 126 A.3 Transformada discreta de Fourier (DFT) 127 Anexo. Recomendación UIT-T P.800………. 129
Glosario………. 137
ÍNDICE DE FIGURAS
Figura 1. Diagrama a bloques general de un sistema………. 3
Figura 2. Diagrama a bloques de un sistema térmico. 3
Figura 3. Diagrama a bloques de las fuentes y señales……….. 4
Figura 4. Señal continua en tiempo. 6
Figura 5. Señal discreta en tiempo………. 6
Figura 6. Señal de periodo T. 8
Figura 7. Señal de longitud semi-infinita………... 9
Figura 8. Señal determinística modelada por una función parabólica. 10
Figura 9. Señal aleatoria de voz………. 10
Figura 10. Diagrama a bloques de un sistema analógico de comunicación. 12
Figura 11. Diagrama a bloques básico del procesamiento analógico de señales……... 14
Figura 12. Diagrama a bloques de un sistema digital de comunicación. 14
Figura 13. Diagrama a bloques del procesamiento digital de señales……… 17
Figura 14. Relación señal a ruido. 22
Figura 15. Distribución Gaussiana en amplitud del ruido……….. 23
Figura 16. Diagrama del modelo aditivo. 24
Figura 17. Umbral fijo……… 29
Figura 18. Umbral suave. 30
Figura 19. Funciones ventana………. 83
Figura 20. Más funciones ventana. 84
Figura 21. Diagrama a bloques del sistema de reducción……….. 85
Figura 22. Traslape de ventanas. 90
Figura 23. Diagrama a bloques para la construcción de un espectrograma…………... 91
Figura 24. Señales de longitud finita. 92
Figura 25. Parámetro de ventaneo……….. 93
Figura 26. Espectrograma. 94
Figura 27. Espectrograma en 3D……… 94
Figura 28. Matriz de espectrograma S; vectores frecuencia y tiempo F, T. 95
Figura 29. Diagrama a flujo del proceso de filtrado……….. 97
Figura 31. Diagrama a bloques de la implementación………... 101
Figura 32. Ventanas. 102
Figura 33. Gráficas de senoidal a 15dB de SNR……… 104
Figura 34. Comparación entre técnicas de reducción 1. 105
Figura 35. Gráficas de senoidal a 5dB de SNR……….. 106
Figura 36. Comparación entre técnicas de reducción 2. 107
Figura 37. Graficas de pulsos rectangulares a 13dB de SNR………. 108
Figura 38. Comparación entre técnicas de reducción 3. 109
Figura 39. Señal de audio original……….. 109
Figura 40. Señal de audio. 110
Figura 41. Señal de audio procesada……….. 111
Figura 42. Señal de audio del filtro promediador. 111
Figura 43. Espectrograma del filtrado promediador………... 112
Figura 44. Señal de voz. 113
Figura 45. Señal de voz procesada………. 114
Figura 46. Señal de voz del filtro promediador. 115
Figura 47. Espectrogramas en perspectiva angular……… 116
Figura 48. Mediciones a 5dB de SNR. 118
Figura 49. Mediciones a 10dB de SNR……….. 118
Figura 50. Mediciones a 15dB de SNR. 119
Figura 51. Mediciones a 20dB de SNR……….. 119
Objetivo.
Introducción.
Probablemente la vista y el oído son los sentidos humanos más relevantes para la relación entre personas y el ambiente externo, en consecuencia gran parte de las aplicaciones del PDS está enfocado al desarrollo y el tratamiento de señales de video y de audio y a su vez sistemas de comunicación en general.
Las señales percibidas por nuestros sentidos son completamente analógicas sin embargo para su análisis y el tratamiento se utiliza una conversión a formato digital donde la señal puede ser modificada en beneficio del elemento que lo requiera, es este el principal objetivo de un procesamiento digital de señales, el uso óptimo de las herramientas disponibles para hallar una mejoría si es que existen inconvenientes.
Todas las señales independientemente del formato en el que se trabaje, pueden ser alteradas por factores que limitan la capacidad para la transmisión, recepción e inclusive el manejo de la misma, uno de los factores que la afecta de forma agravante es el ruido, definido como una señal indeseable que perturba el desempeño de la comunicación y que está presente de varias formas y en muchos lugares siendo inevitable la convivencia de este con las señales y los sistemas y puede traer consigo a su vez efectos psicológicos y fisiológicos adversos a la salud humana. Por lo tanto, varios métodos para evitarlo, o si es que ya está presente, suprimirlo o atenuarlo en gran parte, es bastamente estudiado y es el objetivo principal del diseño de herramientas en la ingeniería como es el caso de los filtros.
A pesar de la necesidad actual del manejo digital de datos, el análisis de una señal analógica es igual de importante al fundamentar las bases para el uso de la tecnología reciente, el estudio de estas señales se haya en teorías físicas y matemáticas que como se sabe, modelan y analizan de manera profunda fenómenos que al ser humano le rodea, las señales y los efectos externos que se involucran, como ya se ha hecho mención del ruido, no son una excepción.
sonido varían en relación al tiempo y la frecuencia, estos últimos son también los parámetros de operación de algunos sistemas en ingeniería.
El análisis de Fourier posibilita un estudio a detalle de las señales en tiempo y en frecuencia, lo cual hace de ésta una herramienta matemática indispensable para el área científica, de investigación y desarrollo, muestra el contenido frecuencial a partir de un contenido temporal y viceversa para señales en general que cumplen ciertas condiciones aun así no está exento de sufrir limitaciones siendo la más destacada un principio que gobierna algunas relaciones físicas, la incertidumbre.
Antecedentes.
El procesamiento digital de las señales conocido simplemente por sus siglas PDS se distingue de otras ramas de la ciencia por el tipo de datos con los que trabaja: las señales. En la mayoría de los casos estas señales tienen origen de elementos del mundo real como lo son vibraciones, imágenes, ondas de sonido, etc., conocidas como señales analógicas. El PDS comprende la matemática, los algoritmos y las técnicas utilizadas para la manipulación de estas señales y su conversión hacia un formato digital.
Los orígenes del procesamiento digital de señales se remontan hacia 1960 y 1970 con el uso de las primeras computadoras digitales aunque el PDS estuvo limitado a solo unas pocas aplicaciones por el poco avance y tecnología de la época. La revolución de las computadoras personales en los años 1980 y 1990 permitió al PDS ser más accesible para aplicaciones nuevas y que necesitaban de lo que se podía desarrollar utilizando esta herramienta.
Los objetivos principales de esta área son el tratamiento y mejora de todo tipo de señal como el caso práctico de la optimización visual de una imagen, la detección, reconocimiento y síntesis de sonidos, compresión de datos para su transmisión o almacenamiento y reducción del ruido en audio por citar algunos; es por esto que se ha convertido en una herramienta indispensable en la medicina, exploración espacial, intereses militares, navegación y desde luego las comunicaciones, entre muchos más.
Los reproductores de compact-disc (CD) desarrollados por empresas como Phillips Electronics a partir de 1979 fueron los primeros productos de consumo masivo que aprovecharon la tecnología del procesamiento digital, a su vez la implementación de codificación de voz, compresión de video y módems para los procesadores digitales comerciales representaron un mercado de 50 millones de dólares. El mercado mundial actual es de alrededor de 27200 millones de dólares y la mitad de este volumen está representado por circuitos integrados donde el procesador digital viene incluido y está vinculado a funciones específicas como lo son aceleración de video en una computadora, módems, procesadores de audio, controladores de motores de CA, etc.
Capítulo 1
Señales y sistemas de comunicación.
La principal tarea de un ingeniero es aplicar sus conocimientos teóricos a la vida real, es así como se desarrolla la habilidad técnica de los individuos con el fin de cubrir con un amplio dominio fenómenos y situaciones de cualquier índole y brindar soluciones o alternativas satisfactorias en el área donde se requiera teniendo en cuenta consideraciones, restricciones o requisitos del manejo de los recursos disponibles. Para hallar la solución a un problema en concreto se necesita de un especialista en dicha área que brinde un aporte para comprender los fenómenos involucrados de tal modo que se obtenga una recopilación de información útil orientada a conseguir los objetivos propuestos en un principio. El lenguaje necesario para comprender de manera extensa las situaciones que pudiesen presentarse es la matemática, herramienta indispensable por su basta aplicación al modelado y al análisis; siendo apropiada desde luego para el estudio de las comunicaciones y la electrónica y los conceptos referentes a estas áreas.
1.1Definiciones básicas.
1.1.1 Señales
Una señal es el resultado de la observación o medición de una cantidad física con variaciones respecto al tiempo, espacio, frecuencia o cualquier otra variable o variables independientes, y que lleva asociado un contenido semántico, es decir, un significado propio para la aplicación donde la señal se encuentre,
En general toda señal contiene información que se desea extraer o modificar de acuerdo a los requerimientos de diversas aplicaciones, por ejemplo un sismógrafo que registra actividad telúrica lo representa en forma de señal la cual contiene información sobre la intensidad, frecuencia o duración de los sismos, parámetros los cuales determinan la ubicación de epicentros y origen de los sismos. Otro ejemplo está en la medicina con señales electrocardiográficas que registran el movimiento y estado del corazón para hacer un análisis que conlleve a un diagnóstico médico.
Las señales son representadas por funciones matemáticas de una o más variables. Una señal de
voz puede representarse como una función de una variable dependiente del tiempo ,
mientras que las imágenes se pueden considerar como funciones de dos variables espaciales , .
1.1.2 Sistemas.
El término sistema denota a una colección o conjunto de elementos interrelacionados que conforman un todo unificado, Figura 1.
Figura 1. Diagrama a bloques general de un sistema.
Como ejemplo puede citarse un motor de CD (corriente directa), el cual lo hace funcionar una tensión o voltaje considerado como señal de entrada, y la acción correspondiente al aplicarse es un movimiento angular del eje, que se puede referir como señal de salida. Bajo esta perspectiva el motor es un sistema eléctrico y mecánico que transforma la energía eléctrica en una velocidad angular; así como también lo puede ser un sistema térmico, Figura 2.
Figura 2. Diagrama a bloques de un sistema térmico.
1.1.3 Modelos.
sistemas. Un modelo lo conforman ecuaciones o fórmulas utilizadas en representación de los componentes descritos del sistema, que modelan las acciones que cada uno realiza y en general.
1.2 Señales y fuentes analógicas.
Refiriéndose al contexto de las comunicaciones y la electrónica. Una fuente analógica de información produce una salida que puede tomar cualquier valor dentro de un intervalo continuo de valores en cualquier dominio. Una señal analógica es una forma de onda que puede tomar cualquier amplitud posible dentro de un intervalo continuo de amplitudes a cualquier tiempo, como su diagrama a bloques mostrado en la Figura 3. La presión de sonido de una orquesta tocando música es un ejemplo de una fuente analógica, mientras que las intensidades de cada uno de los instrumentos musicales producen señales analógicas.
Figura 3. Diagrama a bloques de las fuentes y señales, a) Analógica, b) Discreta.
1.3 Señales y fuentes discretas.
Una fuente discreta es aquella que produce una salida que puede tomar únicamente un valor de un conjunto finito de valores a cualquier dominio. La mayoría de las fuentes en la naturaleza son analógicas, sin embargo, cuando se combinan con algún dispositivo manufacturado puede dar como resultado una fuente digital, Figura 3. La temperatura es una cantidad analógica pero cuando se combina con un termostato que se activa con solo algunos valores de temperatura puede considerarse dicha combinación como una fuente digital.
A su vez, una señal digital se define como una forma de onda eléctrica que únicamente toma una amplitud de un conjunto finito de amplitudes sobre el tiempo. Si el termostato se diseña para que dé un cierto valor de voltaje cuando esta encendido y cero cuando este apagado, esta salida se le puede considerar como una señal digital. Muchos de los aparatos electrónicos tratan con señales digitales para su funcionamiento, como en el caso de las computadoras.
1.4 Algunas clasificaciones de las señales.
Es de suma importancia hallar una clasificación de las señales debido a las extensas formas que pueden adoptar, la clasificación dependerá de sus características particulares y la utilidad que tienen para algunos sistemas.
1.4.1 Señales multicanales y multidimensionales.
Un conjunto de fuentes que brindan señales dependientes o independientes entre sí forman un grupo de señales que pueden ser percibidas y analizadas de forma grupal o separada pero todas necesarias, se define entonces una señal multicanal al conjunto de señales provenientes de fuentes separadas. Es el caso de la electrocardiografía que utiliza varios sensores colocados en distintas partes del cuerpo para captar señales rítmicas producidas por el corazón.
= { , , , … , }
Cuando una señal depende de una única variable independiente, matemáticamente expresado , se denomina unidimensional, y si es función de M-variables independientes, de la forma , , … , se describe como M-dimensional. Una señal de 2 variables o bidimensional pudiera ser una fotografía la cual expresa de manera independiente un parámetro importante como lo es el color, ubicado en un punto de largo y ancho de la imagen.
1.4.2 Señales continuas o discretas en tiempo.
Las señales de tiempo continuo están definidas para cualquier valor de tiempo, y pueden tomar
valores en el intervalo continuo , , donde puede ser −∞ y puede ser +∞.
Matemáticamente estas funciones pueden describirse como función de variable continua, Figura 4.
Figura 4. Señal continua en tiempo.
Ejemplos de señales continuas son algunas señales analógicas, impulsos que podemos percibir a través de nuestros sentidos de manera común, por ejemplo la voz humana, la energía eléctrica que se utiliza para conectar electrodomésticos, las ondas generadas por un horno de microondas, entre otras.
Las señales discretas en tiempo están definidas en determinados instantes de tiempo, y solamente en ellos, Figura 5. Estos instantes de tiempo no tienen que ser equidistantes, aunque en la práctica frecuentemente lo son por conveniencia computacional y para que resulten matemáticamente tratables. Se debe tener presente que para valores de tiempo donde la señal no tenga valor, se dice simplemente que no está definida, más no que su valor sea cero o nulo.
En las aplicaciones las señales discretas pueden surgir de dos maneras:
1. Eligiendo valores de una señal continua o analógica, en determinados instantes de
tiempo. Este proceso es sumamente utilizado en las comunicaciones digitales denominado muestreo. Todos los instrumentos de medición que toman medidas a intervalos regulares de tiempo proveen señales de tiempo discreto.
2. Por acumulación de una variable durante un periodo de tiempo. Por ejemplo la cuenta
de los automóviles que pasan por una determinada calle a una hora, o el registro de la cotización promedio del dólar.
1.4.3 Señales continuas o discretas en amplitud.
Una señal continua o discreta en tiempo, sus valores de amplitud también pueden ser continuos o discretos. Si la señal toma todos los posibles valores sobre un rango finito o infinito, se dice que es una señal de amplitud continua. El proceso de conversión de una señal de amplitud continua en una discreta se denomina en comunicaciones como cuantización, el cual es un proceso de aproximación que puede llevarse por redondeo o truncación.
Usualmente los valores de una señal discreta son equidistantes, y por lo tanto pueden expresarse como un entero múltiplo de la distancia entre dos valores sucesivos. Una señal que es discreta en tiempo, que toma valores discretos en amplitud suele denominarse una señal digital.
de amplitud continua (es decir una señal analógica), antes de su procesamiento debe ser convertida en una señal digital discretizándola en tiempo y cuantizándola en amplitud.
1.4.4 Señales periódicas o aperiódicas.
Una señal periódica es aquella que se repite exactamente a sí misma en un lapso fijo. Suele
escribirse como = + ∀ , donde es el periodo de la señal, Figura 6. Una señal
periódica es una señal de potencia.
Figura 6. Señal de periodo T.
Aquellas señales ausente de un periodo de repetición se conocen como señales aperiódicas, también conocidas como señales de energía.
1.4.5 Señales de longitud finita, semi-infinita o infinita.
Una señal semi-infinita es aquella que está definida en un intervalo demasiado grande que tiende a infinito, por ejemplo todos los valores positivos o todos los valores negativos para una señal, Figura 7.
Figura 7. Señal de longitud semi-infinita.
1.4.6 Señales determinísticas o aleatorias.
El procesamiento y análisis matemático de las señales requiere disponer de una descripción matemática de la misma, esta descripción frecuentemente denominada modelo de señal conduce a otra importante clasificación de las señales. Una señal que puede describirse de manera especial por medio de una expresión matemática, una tabla de valores, o una regla bien definida, entonces se denomina determinística, Figura 8. Este término indica que tanto los valores pasados, presentes y futuros de la señal, se conocen con precisión y sin ninguna incertidumbre [2].
Figura 8. Señal determinística modelada por una función parabólica = .
Figura 9. Señal aleatoria de voz.
1.4.7 Señales de energía o de potencia.
En sistemas de comunicaciones, una señal puede representar indistintamente una tensión o
corriente [1]. Si una tensión fluye sobre una resistencia con una corriente , la
potencia instantánea disipada en la resistencia es:
En ambos casos, la potencia instantánea es proporcional al cuadrado de la señal, en el caso
especial en que la resistencia tuviese un valor de Ω, ambas ecuaciones adoptan la misma
expresión. Por ello, en el análisis de señales es habitual adoptar esta convención de modo que
dada una señal se define la potencia instantánea de la misma como potencia normalizada
a través de:
=
De acuerdo con esta convención, se define la energía total de la señal como energía normalizada por medio de:
= lim�→∞∫� =
−� ∫
∞ −∞
Y la potencia promedio a la expresión:
= lim�→∞ ∫�
−�
Para el caso de las señales discretas, la energía y la potencia se calculan respectivamente mediante:
= ∑ [ ]
∞ =−∞
= lim→∞ + ∑ [ ]
=−
En cualquiera de los dos casos, se dice que una señal es de energía si < ∞ y de potencia
si < < ∞.
Idealmente la clasificación de las señales como de potencia o de energía son mutuamente excluyentes. En particular, cualquier señal de energía tiene potencia promedio nula, mientras que una señal de potencia tiene energía infinita.
(1.3)
(1.4)
(1.5)
(1.6)
1.5 Sistema analógico de comunicación.
En la Figura 10, se muestra un modelo de sistema de comunicación, que es el más usado generalmente. Aunque sugiere un sistema de comunicación entre dos puntos remotos, este diagrama a bloques se puede aplicar también a sistemas de sensores remotos, tales como el radar y el sonar, donde los sistemas de entrada y salida pueden estar localizados en el mismo lugar. Haciendo caso omiso de las aplicaciones y configuraciones particulares, todos los sistemas para transmisión contienen, de manera invariable, tres subsistemas principales: transmisor, el canal y el receptor. Se procederá a explicarse cada uno de los bloques en términos generales del sistema de comunicación analógico [2].
Figura 10. Diagrama a bloques de un sistema analógico de comunicación.
a) Transductor de entrada. La amplia variedad de posibles fuentes de información para el
envío de la misma da por resultado distintos tipos de mensajes. Sin embargo sin importar su forma exacta los mensajes se pueden clasificar como analógicos o digitales como ya se ha visto sus características. Para los sistemas analógicos las señales a tratar son analógicas y pueden servir de modelo matemático las funciones de variable continua en el tiempo. Casi invariablemente, el mensaje que se produce en la fuente debe convertirse por medio de un transductor a una forma apropiada al tipo particular de sistema que se emplee para su transmisión. Por lo tanto, una señal podrá ser interpretada como la variación de una cantidad con respecto al tiempo, por ejemplo voltaje o corriente.
b) Transmisor. El propósito del transmisor es acoplar el mensaje al canal. Aunque no deja
transmisión, como sucede en algunos sistemas de intercomunicación; sin embargo es generalmente necesario ocupar un método de modulación y para sistemas analógicos, señales de referencia analógica de igual modo.
c) Medio de transmisión. Es un medio físico por donde viaja la información desde el
transmisor al receptor. El canal puede tener diferentes formas, siendo quizás la más conocida el canal que existe entre la antena transmisora de la radioemisora comercial y la antena receptora del equipo de radio, este canal sería entonces el aire. Un problema importante en los sistemas de comunicación es la degradación que sufre la señal. Aunque esta degradación puede presentarse en cualquier punto del sistema a bloques se acostumbra asociarla solamente al canal debido a que es el punto más susceptible para modificar la señal. Con frecuencia esta degradación es el resultado del ruido, o de otras señales indeseadas o interferencias, pero puede también incluir otros efectos de distorsión como el desvanecimiento.
d) Receptor. La función del receptor es extraer la señal deseada del conjunto de señales
recibidas a la salida del canal. Aunque la amplificación puede ser una de las primeras operaciones realizadas por el receptor, la función principal es demodular la señal recibida es decir, el proceso inverso que efectúa el transmisor.
e) Transductor de salida. Este dispositivo convierte la señal eléctrica de la entrada a la
forma que desee el usuario o el operario del sistema, en sistemas de audio la bocina es el transductor de salida, convirtiéndola desde señales eléctricas captadas por un micrófono a la entrada en señales de audio fácilmente percibidas por el oído humano.
1.5.1 Procesamiento analógico.
Es difícil obtener circuitos muy precisos con un costo razonable debido a las tolerancias de los componentes, alinealidad de los amplificadores, desvíos con la temperatura, etc.
La repetitividad de los circuitos es limitada por efecto de las tolerancias y variaciones
derivadas de condiciones ambientales como temperatura, vibraciones, etc.
Son muy sensibles al ruido eléctrico (ruido interno de amplificadores)
Figura 11. Diagrama a bloques básico del procesamiento analógico de señales.
1.6 Sistema digital de comunicación.
Un sistema de comunicación digital, Figura 12, es aquel que transmite información usando únicamente un conjunto finito de símbolos [5].
Un sistema de comunicación típico formado por una estación de transmisión, una estación de recepción y un medio de transmisión para la conexión al que se le denomina canal, en general los mismos componentes que un sistema analógico de comunicación, pero con más bloques, en algunos casos, que forman los subsistemas, que son descritos a continuación.
a) Subsistema de transmisión. A pesar de ser llamado sistema digital de comunicación,
los subsistemas pueden manejar a la entrada señales analógicas que deberán ser convertidas a señales digitales para el correcto desempeño del sistema digital.
a. El proceso de conversión analógico a digital abarca procedimientos de
muestreo, cuantificación y codificación, tales operaciones son realizadas por un convertidor A/D.
b. El propósito general del codificador de la fuente es convertir efectivamente
cada símbolo discreto de la señal digital en una representación adecuada, algunas veces binaria y otras M-arias. Uno de los objetivos del codificador de la fuente es remover la redundancia, es decir entre más eficiente es el codificador más redundancia se remueve, lo que permite que se reduzca el número de dígitos binarios para representar el mensaje.
c. Al incluir la función de codificador de canal se pueden reducir los efectos de
los errores causados por el canal; el codificador de canal hace esto posible sumando redundancia controlada a la señal digital, de una manera conocida tal que los errores puedan reducirse.
d. La función del modulador es convertir la señal digital a una forma apropiada
para transmitirla sobre el canal.
b) Canal de comunicación. Con frecuencia para cuestiones de análisis de sistemas de este
tipo se hace suponer un canal lineal e invariante en el tiempo, con una capacidad y ancho de banda determinado y factores como ruido de características especiales, descrito por un modelo de canal denotado como AWGN.
c) Subsistema de recepción. Las funciones hechas en este subsistema son las operaciones
contrarias a las efectuadas en el subsistema de transmisión.
a. El demodulador recrea lo mejor posible una versión de la salida que fué
optimización de diversos sistemas de comunicación digital se centra en minimizar los errores producidos en el demodulador.
b. El propósito del decodificador de canal es reconstruir lo mejor posible la salida
generada por el codificador de la fuente en el transmisor. Es aquí donde puede usarse redundancia controlada, insertada por el codificador de canal para detectar y corregir algunos errores en la salida del demodulador causador por el canal.
Cabe aclarar que las funciones que pueden estar presentes en un sistema de comunicación digital no siempre reflejan la realización ideal del sistema. Algunos sistemas prácticos no siempre siguen la secuencia ni incluyen todos los bloques mostrados.
1.6.1 Procesamiento digital.
Procesamiento digital de señales: Esa disciplina que nos ha permitido reemplazar un circuito previamente compuesto por un capacitor y un resistor con dos filtros anti-aliasing, y convertidores analógico al digital y viceversa, y un ordenador de propósito general, siempre que la señal en la que estamos interesados no varíe demasiado rápido.1
El procesamiento digital de señales (PDS) se basa en representar las señales por valores en una computadora, o hardware digital especializado, y efectuar una serie de operaciones numéricas (adiciones, multiplicaciones, operaciones lógicas, transferencias de datos, etc.) sobre esas señales. Para implementar una señal en un sistema PDS es necesario:
Convertir las señales analógicas en información digital, en la forma de una sucesión de
números binarios.
Efectuar operaciones numéricas sobre la información digital, es decir brindarle un
tratamiento de objetivo especial.
Convertir nuevamente a una señal analógica los datos obtenidos después de procesamiento.
A pesar de la mayor complejidad que tiene un procesamiento digital sobre un analógico, varias razones justifican el PDS inclusive para señales analógicas en lugar de preferir un tratamiento enteramente analógico.
Figura 13. Diagrama a bloques del procesamiento digital de señales.
Las computadoras pueden hacer operaciones con un grado de precisión arbitrariamente
alto, incrementando la longitud de palabra tanto como sea necesario.
Los sistemas digitales son altamente repetibles.
La representación numérica de punto flotante permite un rango dinámico prácticamente elevado.
El almacenamiento digital es barato y flexible, en consecuencia la información puede
ser transportable y puede ser procesada fuera de su lugar de origen.
El PDS permite implementar algoritmos muy elaborados; usualmente es muy difícil
efectuar operaciones matemáticas precisas con hardware analógico, que puede efectuarse sin dificultad en una computadora.
Capítulo 2
Teoría básica del ruido.
2.1El ruido.
El ruido se define como una señal indeseable que interfiere con las comunicaciones y las mediciones de las señales. El ruido en si es una señal portadora de información que transmite información con respecto a las fuentes de ruido sin precisar, y del entorno en el que se propaga; es técnicamente el resultado de la combinación de sonidos de una sola frecuencia o tonos puros, y tiene esencialmente un espectro de frecuencia continua, de amplitud y longitud de ondas irregulares [25]. El ruido auditivo propagado por el aire se debe a fluctuaciones en la presión del aire con respecto a la presión atmosférica media.
El origen del ruido en los sistemas de comunicación se puede clasificar en dos grandes clases de fuentes, aquellas que son externas al sistema como fuentes atmosféricas, solares, cósmicas y producidas por el hombre; y aquellas que son internas al sistema [2]. El grado con que las fuentes externas de ruido influyen en el funcionamiento del sistema depende considerablemente de la localización y configuración del sistema en particular. Por consiguiente el análisis confiable de su efecto sobre el funcionamiento del sistema es difícil y depende grandemente de fórmulas empíricas y medidas relativas. El ruido interno se da en los subsistemas que constituyen un sistema de comunicación y es el resultado del movimiento aleatorio de los transportadores de carga dentro de los dispositivos que conforman dichos subsistemas.
El éxito de los métodos de procesamiento del ruido depende de la habilidad para caracterizar y modelar el proceso ruidoso y usar sus características para distinguirlo de la señal a restaurar.
2.2Clasificación del ruido.
Se puede clasificar el ruido según su procedencia indicando su naturaleza física:
a) Ruido electrónico. Producido por los dispositivos o elementos que conforman el diseño
del sistema, como ruido térmico y ruido de disparo.
b) Ruido acústico. Emana de fuentes que están en movimiento o vibración. Por ejemplo
el ruido producido por el movimiento de los coches, aire acondicionado, tráfico, viento, etc.
c) Ruido electromagnético. Presente en todas las frecuencias, en particular en la radio.
Todos los aparatos eléctricos que utilizan ondas de radio generan ruido electromagnético.
d) Ruido electrostático. Generado por la presencia de una tensión con o sin corriente. Las
luces fluorescentes son una de las fuentes más comunes de este tipo de ruido.
e) Ruido de procesado. Resulta del proceso de conversión analógico al digital de las
Otros fenómenos que afectan a las señales y a los sistemas son la distorsión de canal, ecos y desvanecimientos, todos ellos debidos a las características no ideales de los canales de comunicación. Las comunicaciones móviles son particularmente sensibles a estos fenómenos.
La distorsión de señal es un término comúnmente utilizado para describir un cambio sistemático indeseable comúnmente producido por reflexiones múltiples y muestras faltantes.
Otra clasificación dependiente de las características de frecuencia, espectro o tiempo es:
a) Ruido blanco. El ruido blanco tiene una función de autocorrelación impulsiva y un
espectro de densidad de potencia plano. Este tipo de ruido contiene teóricamente todas las frecuencias con la misma potencia.
b) Ruido blanco de banda limitada. Similar al ruido blanco, con un espectro de densidad
de potencia plano, pero limitado en banda que normalmente cubre el espectro de operación de la señal o dispositivo de interés.
c) Ruido de banda estrecha. Es un proceso ruidoso con un ancho de banda pequeño, como
50 o 60 Hertz de la toma eléctrica.
d) Ruido coloreado. Es cualquier otro tipo de ruido que no sea blanco o cuyo espectro en
potencia no tenga forma plana. Dentro de este se encuentran el ruido rosa y el ruido marrón.
e) Ruido impulsivo. Consiste en pulsos de duración corta y de amplitud aleatoria. Es
debido a una gran variedad de fuentes.
f) Ruido de pulsos transitorios. Consiste en impulsos de duración relativamente grande.
Generalmente un pulso inicial seguido por oscilaciones de baja frecuencia.
2.3Relación señal a ruido (SNR)
La relación señal a ruido es un índice que históricamente ha sido utilizado en la industria de las comunicaciones para evaluar el desempeño de los sistemas de comunicación.
= ñ
La relación frecuentemente es expresada también en decibeles de la siguiente manera:
�� = log
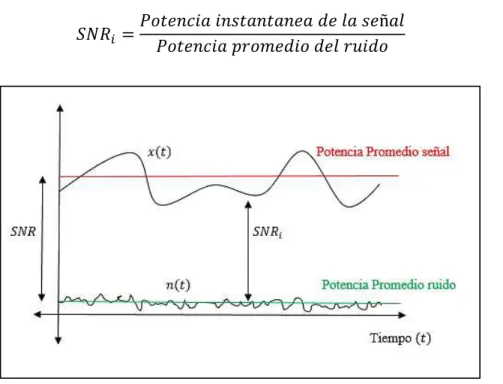
Otra terminología de la relación señal a ruido utilizada para análisis en tiempo preciso es dependiente de la potencia instantánea de la señal.
= ñ
Figura 14. Relación señal a ruido.
2.4Sensibilidad y nivel mínimo detectable.
En un sistema receptor, la calidad de la señal a la salida se mide en términos de la relación señal a ruido obtenida. Es evidente que esta relación señal a ruido será tanto mayor cuanto mejor sea la relación señal a ruido a la entrada y cuanto menor ruido añada el receptor o el canal. Por lo tanto la relación señal a ruido a la salida estará condicionada por la relación señal a ruido a la entrada así como la presente de forma interna en el sistema. Se denomina sensibilidad al nivel de potencia que debe tener la señal de entrada para obtener una relación
(2.1)
(2.2)
señal a ruido a la salida específica. Se denomina señal mínima detectable , al nivel de tensión de señal de entrada correspondiente a la sensibilidad [9].
La sensibilidad siempre debe especificarse para una relación señal a ruido de salida concreta. Aunque la relación señal a ruido requerida en una determinada aplicación no sea la misma que la especificada con la sensibilidad, esta proporcionará una medida objetiva para comparar el comportamiento de los sistemas de comunicación. Para cada aplicación será necesaria una determinada relación, en el caso de sistemas en general son adecuadas relaciones por encima de 10 dB.
2.5Modelo AWGN.
En la teoría clásica de comunicaciones es común el estudio del ruido a través de un modelo matemático que especifique un tipo de ruido en particular y sus parámetros generales. Se dice que el ruido es un proceso estacionario; aditivo debido a que se suma a la señal original; blanco por su espectro de densidad de potencia plano y gaussiano porque sus valores en amplitud siguen una distribución de probabilidad gaussiana (Additive White Gaussian Noise). Así que para algunos problemas esta suposición es válida y conduce a soluciones matemáticas útiles, Figura 15 y Figura 16.
El canal AWGN es un buen modelo para muchos satélites y enlaces de comunicación de espacio profundo, aunque no es un buen modelo para trayectorias de enlaces terrestre debido a otros factores de perturbación de la señal. Sin embargo AWGN se utiliza ampliamente para simular el ruido de fondo en algunos canales de comunicación.
Figura 16. Diagrama del modelo aditivo.
2.6Técnicas para el tratamiento del ruido.
La comunicación bajo condiciones ruidosas es una tarea difícil y fatigante. En el caso de señales de voz, los sonidos tales como consonantes, fricativas y plosivas a menudo resultan enmascarados por ruido, con lo que se origina una reducción en la discriminación de la voz. Otro tipo de degradación son las reverberaciones y distorsiones de canal debidos a múltiples factores desde la calidad del equipo o los elementos del sistema, el propio canal de transmisión y hasta los efectos producidos por la codificación digital para su transmisión.
En presencia de ruido de fondo, el sistema auditivo humano es capaz de emplear mecanismos efectivos para reducir el efecto del ruido en la percepción de las señales deseadas.
incomprensibles, eliminando el ruido de la señal en su mayor medida. Además se puede añadir un objetivo secundario como es la mejora de la calidad de escucha, aunque la señal ya sea inteligible.
El avance del procesado digital de las señales ha supuesto una revolución que se ha plasmado en todos los campos del procesado incluyendo las técnicas de mejora de voz y eliminación de ruido en señales en general. Es posible establecer una división entre las técnicas, según el número de canales de entrada de audio disponibles. Así se tendrán técnicas monocanal y multicanal.
2.6.1 Técnicas monocanal para el tratamiento del ruido.
En los inicios de estas técnicas se encuentran operaciones con filtros y técnicas de periodicidad de señal, como filtrado de peine adaptativo o las de selección armónica. Estos esquemas, dan buenos resultados en condiciones ideales, pero en situaciones de tiempo real no son aplicables de manera directa [25].
Una de las propuestas iniciales que se plantean a la hora de abordar un filtrado, es plantear la eliminación del ruido como un problema de estimación de parámetros, donde la estimación óptima de la señal limpia puede llevarse a cabo bajo el criterio de optimización de, por ejemplo, el factor MSE (Error cuadrático medio) o de la SNR (Relación señal a ruido) de la estimación de la señal procesada frente a la señal original.
Las técnicas desarrolladas hasta ahora pueden englobarse en tres grandes grupos, en función de cómo se realice la reducción:
Filtrado lineal adaptativo.
Substracción espectral.
Basado en modelo.
La base del filtrado lineal adaptativo es hacer pasar a la señal ruidosa a través de un filtro lineal que se adapta al ruido a eliminar, atenuando así la componente de ruido, dejando la señal procesada sin distorsión en la medida de lo posible. Los filtros de Wiener se encuentran dentro de esta categoría.
Los fundamentos de la resta espectral para la reducción de ruido se basan en obtener, durante tramos de ausencia de la señal un estimado de medición del ruido para sustraerlo del espectro completo de la señal en cada momento, esto fué implementado por Steven F. Boll. El hecho de estar restando un estimado de ruido, en lugar de su espectro en cada instante hace que aparezcan picos espectrales distintos en tramas consecutivas, convirtiéndose al reconstruir en el dominio temporal, en tonos de muy corta duración y cuyas frecuencias varían de trama en trama. A esto se le denomina ruido musical, obligando a introducir modificaciones al algoritmo inicial.
Es Berouti quien en su método, inicia una primera aproximación para solucionar el problema de ruido musical, estableciendo un umbral mínimo por debajo del cual no se aplica resta espectral. El mayor o menor nivel de este umbral supondrá atenuar más o menos el ruido musical, obteniendo la presencia de un menor o mayor ruido residual respectivamente.
Otro paso importante en la eliminación de ruido lo supone la resta espectral no lineal propuesta por Lockwood y Boudy. En este caso los factores de los que depende la resta, así como los umbrales que se establecen, se hacen dependientes de la frecuencia. Obteniéndose un ajuste optimo entre la cantidad de ruido que se puede sustraer sin introducir distorsión.
Una alternativa reciente basada en las características del habla humana consiste en un post procesado tras la resta, consistente en dos pasos: en el primero clasificarla voz y el ruido musical, dejando en el segundo paso intactas las zonas de voz y modificando por un valor promediado lo que le rodea en las zonas clasificadas como indeseables.
El algoritmo más conocido para la categoría de substracción espectral es MMSE (Minimum Mean Squared Error).
Los métodos de reducción basados en modelos, tratan la reducción de ruido como un problema de estimación de parámetros, donde se hace uso de diversos modelos matemáticos de la generación de la voz. Técnicas como LP-Kalman (Linear Prediction) son representativas de este grupo [26].
2.6.2 Técnicas multicanal para el tratamiento del ruido.
Dentro de esta técnica encontramos diferentes configuraciones según las entradas de audio:
Dos canales.
Múltiples canales de entrada (Arreglo de micrófonos).
Procesado binaural.
En el primer caso se dispone de dos entradas de audio con el que se puede hacer uso de un filtro adaptativo para mejorar la señal contaminada. La principal limitación de estas técnicas es que se debe tener una de las entradas con una buena referencia del ruido del otro canal, caso que solo se dará en unos casos muy concretos. Una alternativa se encuentra en el uso de la coherencia entre ambas señales para la extracción limpia sin ruido a partir de dos tomas distintas de la señal.
El uso de arreglos de micrófonos busca combinar de manera adecuada las salidas de los micrófonos formando haces de recepción lo más selectivo posibles para el caso de señales de audio. Y recoger la señal deseada, atenuando al máximo el resto de las señales indeseadas. Esta técnica se denomina conformación de haz y obtiene mejores resultados para audio reverberante [26].
En la realidad una situación de arreglo de micrófonos no es la más común. Un ejemplo sencillo de esto es en la telefonía celular, el cual solo dispone de un micrófono, por lo que son captados voz y ruido ambiente por igual. En este caso un método monocanal sería el más conveniente y de igual forma pasa para muchos sistemas de comunicación.
Por último el procesado binaural es basado en el sistema auditivo humano. Haciendo uso de dos señales que llegan a los oídos y tener la capacidad de concentrarse en una de ellas aun cuando existen más alrededor y la posibilidad de distinguir bajo algunas condiciones de ruido.
El modelo genérico de Blauert incluye los siguientes elementos funcionales: filtros para la simulación de las funciones de transferencia del oído externo, filtros para la simulación del mecanismo de transferencia del oído medio, elementos que simulen las funciones del oído interno, un elemento funcional que simule la evaluación de diferencias interaurales de tiempo y la identificación de componentes coherentes de la señal. El inconveniente de esta técnica es la necesidad de construir un modelo de inteligencia artificial para el control de todos los procesos.
2.6.3 Método de umbral.
2.6.3.1Umbral fijo.
Del inglés Hard Thresholding, umbral fijo es un método en el cual si el valor de una señal está por debajo de un valor prefijado se ajusta a cero:
= { , , | | < � | | �
Donde � es el valor de umbral. Una representación del método es mostrada en la siguiente
figura, Figura 17. Observe que la gráfica es discontinua en = �.
Figura 17. Umbral fijo.
2.6.3.2Umbral suave.
Umbral de tipo suave (Soft Thresholding) se define matemáticamente como:
= { , | | − � , | | < � | | �
La función es generalmente una función lineal (una línea recta con pendiente elegida).
Sin embargo las curvas de tercer y cuarto orden pueden ser usados efectivamente para valores
mayores a �. En algunas aplicaciones de compresión de señal usando curvas cuadráticas de
orden mayor a 2 afectan la relación de compresión por una pequeña cantidad. Figura 18. (2.4)
Figura 18. Umbral suave.
2.6.3.3Porcentaje de umbral.
En ciertas aplicaciones como compresión de imagen cuando un contingente de bit ha sido asignado al archivo comprimido, es ventajoso utilizar este método para establecer ciertos porcentajes y satisfacer los requisitos de compresión. En este caso el ajuste del valor de umbral
� es en base a un histograma. La regla de umbral es la misma que la de umbral fijo una vez
determinado el porcentaje para �.
2.7Evaluación de la reducción de ruido.
El principal objetivo de la reducción de ruido es suprimir las muestras de ruido dejando intacta y sin distorsiones a la señal original; es por esto que cuando se lleva a cabo un método para la reducción se necesita de un criterio para comprobar y comparar el rendimiento de la implementación.
Existen dos categorías en las que se clasifican estos criterios:
Medidas subjetivas.
Las medidas subjetivas hacen referencia a una prueba realizada por un grupo de personas, escuchando muestras de audio y asignando una calificación a éste, o realizando una comparación con otros audios de las mismas características. Se podría decir que en este caso se realiza un examen cualitativo del resultado de la reducción. Existen varias pruebas en este sentido, como pueden ser los test MOS (Mean Opinion Score) o los test CE (Categorical Estimation)
Al contrario de las medidas subjetivas, las medidas objetivas se obtienen a partir de los resultados del filtrado, atendiendo así a aspectos cuantitativos de la señal, siendo independientes de criterio humano alguno.
Atendiendo a estas dos categorías al momento de comprobar los resultados obtenidos, siendo coherentes con los objetivos propuestos al principio, se debería dar mayor importancia a las medidas subjetivas, ya que están basadas en el juicio de las personas y por lo tanto el usuario final. En la práctica realizar este tipo de medidas es de una gran complejidad y coste, por el tiempo empleado en realizar las medidas y la escasa uniformidad, dependiendo siempre del criterio humano que quizás pueda fallar en ocasiones. Es por eso que gracias a su simplicidad y rapidez en los cálculos, las medidas objetivas han sido desarrolladas, siendo la más común la medida obtenida por el factor de relación señal a ruido SNR.
Capítulo 3
Análisis de señales.
3.1 Algebra lineal [7].
Es la rama de las matemáticas que estudia conceptos abstractos tales como vectores, matrices, sistemas de ecuaciones y demás dando un enfoque formal a los conceptos de
espacios vectoriales y transformaciones lineales.
3.1.1 Espacios vectoriales.
Una colección de objetos generalmente es conocido como conjunto, un miembro de esta colección se llama elemento del conjunto. Resulta práctico denotar conjuntos con símbolos
breves como lo es el conjunto de los números reales ℝ o bien el de los números complejos ℂ
entre otros. Un espacio vectorial sobre un campo K es un conjunto de objetos que cumplen
determinadas propiedades.
3.1.2 Campos y subconjuntos.
Si se refiere a un valor el cual es un elemento de un conjunto se dice que está en
escribiendo . Si y ′ son conjuntos y si cada elemento de ′ es también un elemento
El hecho esencial acerca de un campo es que éste es un conjunto de elementos que se pueden multiplicar y sumar de tal manera que por una parte la adición y la multiplicación satisfacen las reglas ordinarias de la aritmética y por otra, se puede dividir por elementos distintos de cero.
Supóngase que y son campos, y que está contenido en , es decir que es un subconjunto de , entonces se dice que es un subcampo, similar a lo sucedido en los conjuntos.
Se decía que un espacio vectorial sobre un campo es un conjunto de objetos que se pueden sumar y multiplicar por elementos de , de tal manera que la suma de dos elementos de es, de nuevo un elemento de y el producto de un elemento de por un elemento de es un elemento de y además se satisfacen las propiedades siguientes:
1. Dados los elementos de , , de (propiedad asociativa de la adición) se tiene que:
+ + = + +
2. Existe un elemento de , denotado por (propiedad de neutro aditivo) tal que:
+ = + =
Para todos los elementos de de , ∀ .
3. Dado un elemento de , el elemento – en (propiedad inverso aditivo) es tal que:
+ − =
4. Para todos los elementos , de (propiedad conmutativa de adición) se tiene que:
+ = +
5. Si es un número, (propiedad distributiva) entonces:
+ = +
6. Si y son números, (propiedad distributiva) entonces:
7. Si y son números, (propiedad asociativa del producto) entonces:
=
8. Para todos los elementos de de (propiedad neutro multiplicativo) se tiene que:
∙ =
Las propiedades algebraicas de los elementos de un espacio vectorial arbitrario son extensibles
a las propiedades de los elementos ℝ , ℝ o de ℝ , en consecuencia se acostumbra llamar
vectores también a los elementos de un espacio vectorial arbitrario.
3.1.3 Aplicaciones.
El concepto general de aplicación generaliza la noción de función ya que una función es un tipo especial de aplicación de un conjunto sobre otro conjunto de números.
Sean y ′ dos conjuntos, una aplicación de en ′ es una asociación que adjunta a todo
elemento en un elemento de ′ denotada por : ⟶ ′.
3.1.4 Aplicaciones lineales.
Sean y ′ espacios vectoriales sobre el campo . Una aplicación lineal
: ⟶ ′
Es una aplicación que satisface las siguientes dos propiedades:
1. Para cualesquiera elementos y en , se tiene
+ = +
2. Para todo en y todo en , se tiene:
3.1.5 Productos escalares.
Sea un espacio vectorial sobre un campo . Un producto escalar se denota con < , > o
también con ∙ , sobre es una asociación tal que a cada pareja de elementos y de le
asocia un escalar, y satisface las siguientes propiedades:
1. Se tiene que:
< , > = < , > ∀ ,
2. Si , , son elementos de , entonces:
< , + > = < , > +< , >
3. Si , entonces:
< , > = < , > = < , >
Se dice que el producto escalar es no degenerado si además satisface la condición:
Si es un elemento de y si < , > = para todo , entonces = ó = .
3.1.6 Ortogonalidad.
El adjetivo ortogonal proviene del griego orthos (recto) y gonia (ángulo). Este concepto denota entonces la perpendicularidad entre dos o más elementos extendiendo su definición matemática hacia el área de ingeniería cuando se habla de señales por ejemplo, utilizando herramientas indispensables para el análisis las cuales se estudiarán más adelante.
Sea un espacio vectorial con un producto escalar; los elementos y se dicen ortogonales
entre sí y se denota ⊥ , si < , >= . Si es un subconjunto de , denotamos con ⊥ el
conjunto de todos los elementos perpendiculares a todos los elementos de , es decir
que < , >= para toda . Entonces empleando propiedades de productos escalares
(también llamado producto interno) se verifica que ⊥ es un subespacio de denominado
espacio ortogonal de . Si es perpendicular a , también se escribe ⊥ . Sea un
subespacio de generado por los elementos de . Si es perpendicular a y si ,
< , + > = < , > +< , >=
Si es un escalar:
< , > = < , >
Por lo tanto es perpendicular a las combinaciones lineales de los elementos de y, por consiguiente, es perpendicular a .
3.1.7 La componente “c”
Se define la norma o longitud de un vector y se denota como || || el número:
|| || = √ ∙ = √ + ⋯ +
Sea un elemento de tal que ∥ ∥≠ . Para cualquier existe un número único que
pueda representar a de la siguiente forma:
=
A su vez sea perpendicular a . Ciertamente para que − = sea perpendicular a , es
decir:
< − , > =
Por lo tanto:
< , > −< , > =
< , > = < , >
Así pues:
=< , >< , >
Recíprocamente, al alcanzar este valor, se nota que − es perpendicular a . Se dice que
es la componente de a lo largo de o bien, es el coeficiente de Fourier de con respecto
a . Se dice que es la proyección de a lo largo de .
(3.1)
(3.2)
(3.4)
(3.5)
3.1.8 Bases ortogonales.
Defínase un espacio vectorial con un producto escalar definitivamente positivo. Se dice que
una base { … } de es ortogonal si sus elementos son mutuamente perpendiculares, esto
es, si < , >= siempre que ≠ . Si además cada uno de los elementos de la base tiene
longitud unitaria se conoce como base ortogonal normalizada u ortonormal.
Los vectores unitarios estándar de ℝ forman una base ortonormal de ℝ con respecto al
producto escalar ordinario.
Si los elementos de una determinada base en se toman en un orden determinado, cualquier elemento de puede entonces ser representado por una secuencia única de coordenadas.
Si tiene como base a = { , , … , } entonces el vector ̅ = + + ⋯ +
puede representarse utilizando tan solo los coeficientes y manteniendo fija la base ̅ =
[ , , … , ]. Ninguna otra secuencia puede representar con la misma base al vector ̅ puesto
que si existiese alguna otra representación equivalente ̅ = + + ⋯ +
entonces la diferencia de ambas representaciones debería ser cero:
− + − + ⋯ + − =
Se cumple solo si = , = , , … , por el requisito de que la base debe ser linealmente
independiente.
3.1.8.1 Teorema de Gram–Schmidt.
Sea un espacio vectorial de dimensión finita con producto escalar definitivamente positivo. Sea un subespacio de y sea { … } una base ortogonal de . Si ≠ entonces existen elementos + , … , de tales que { … } es una base ortogonal de .
El método utilizado para la prueba de este teorema es tan importante como el propio teorema
y se conoce como el proceso de ortogonalización de Gram–Schmidt, el cual es un algoritmo
3.1.9 La componente “c” vectorial.
Si = { , , … , } ⊂ es una base ortogonal de y todo par de vectores y ≠ es ortogonal, se dice que es una base ortogonal de . Si además se cumple que la norma de
todos los vectores generadores ∥ ∥ es unitaria se denomina ortonormal, como ya se ha dado
referencia del concepto.
De bases ortogonales se sabe que un vector representado por coeficientes :
̅ = + + ⋯ +
Se cumple que para todo vector ̅ :
̅ = ∑
=
Realizando el producto escalar con el vector generado específico , haciendo uso de la
ortogonalidad de los vectores generadores se obtiene:
< ,̅> = < ,∑
=
>
= ∑< ,
=
> = ∑ < , >
=
= < , >
< ,̅> = < , > ∴ =< ,< ,̅>>
Similar a la componente mencionada con anterioridad para proyecciones.
(3.7)
(3.8)
(3.9)
3.1.10 Ortogonalidad de funciones.
La representación de un vector ̅ a través de sus componentes para una determinada base ,
puede interpretarse como una función : { , , … , } → que asigna cada vector generado
con índice { , , … , } su coeficiente correspondiente con un valor en el campo , es decir,
= es una función que permite obtener el valor de los coeficientes para cada componente
de la base utilizada.
Es posible representar vectores con un número infinito de dimensiones, utilizando funciones
de la forma : ℤ → , es decir que para un espacio euclidiano el producto interno se
representaría:
< ̅, ̅ > = ∑ ∗ =
Donde y pueden ser valores finitos o infinitos en cualquier rango de enteros consecutivos
tales que .
Este cambio de representación del vector de tupla a función no altera los conceptos de espacios lineales. En un principio, un vector está siendo representado por una función, es decir que estas funciones de variable entera son elementos de un espacio funcional y lineal.
A partir de esta representación resulta como consecuencia natural eliminar la restricción a los vectores-funciones de ser números y permitirles tomar valores en los números reales o complejos; reemplazando enteramente el concepto por funciones, si y solo si los axiomas básicos de espacios lineales se mantienen hacia espacios funcionales.
El producto interno de dos funciones2 y definidas en un intervalo [ , ] se generaliza
entonces a la operación integral:
< , > = ∫ ∗
2 , función dependiente del tiempo para la mayor parte de la literatura de señales.
(3.11)
Con lo que se concluye que las dos funciones son ortogonales en dicho intervalo si su integral es cero. O bien escrito de la siguiente forma:
< , > = ∫ ∗ =
Si y solo si ≠ . En el caso en que = :
< , > = < , > = ∫ ∗ = ∫ | |
Expresando lo anterior con la función delta de Kronecker:
∫ ∗ =
Donde:
= { = ≠
3.2 Análisis de Fourier [3].
No puede existir un lenguaje más universal y simple, más carente de errores y oscuridades, y por lo tanto más apto para expresar las relaciones invariantes de las cosas naturales... Las matemáticas parecen construir una facultad de la mente humana destinada a compensar la brevedad de la vida y la imperfección de los sentidos.3
3.2.1 Serie Generalizada de Fourier
Un conjunto posiblemente infinito de funciones ortogonales pueden servir de base generadora para crear un espacio funcional, de la misma forma que vectores ortogonales sirven de base generadora para espacios lineales. Sea entonces un conjunto de funciones ortogonales:
= { , + , … , − , }
3 Joseph Fourier. Théorie Analytique de la Chaleur. Discurso preliminar 1822.
(3.13)
(3.14)
(3.15)