BIU1)TC OEtERL
r. d
tet)iS*$
e 1ó ( isficch
oç5,g .Z .'
4'
o5
es
7-L
g4AaA 50ESCUELA DE CIENCIAS DE LA COMPUTACIÓN
IMPLEMENTACIÓN DE UN STAND EXPERIMENTAL PARA LA
DETERMINACIÓN DE PÉRDIDAS DE CAUDAL EN TUBERÍAS DE
AGUA UTILIZANDO TECNOLOGÍA DE ADQUISICIÓN DE DATOS
Memoria de tesis previa la obtención
del título de Ingeniero en Sistemas
Informáticos y Computación
Autor:
Felipe Eduardo Sánchez Puertas
Director:
Ing. Jorge Luis Jaramillo
LOJA - ECUADOR
1.1. Conceptos Generales 1.1.1. 1.1.2. 1.1.4. 1.1.5. 1.1.6. 1.1.7. 1.1.8. 1.1.9. 1.1.10. 1.1.11. 1.1.12. 1 1 1 1 2 2 2 2 2 3 3 3 Línea de Corriente...
Filete de Corriente... VenaLíquida... Flujo Permanente o Estacionario... Flujo no Permanente o Irregular... Flujo Uniforme... Flujo no Uniforme o Variado... FlujoIdeal... Trayectoria... Campo Vectorial... Movimiento (flujo) Plano... Movimiento (flujo) Unidimensional...
1.2. Métodos de Estudio del Flujo de Fluidos... 3 1.3. Movimiento de una partícula infinitamente pequeña de líquido.
Noción sobre el movimiento rotacional e irrotacional... 5
1.4. Ecuación de Continuidad... 11
1.5. Ecuaciones Diferenciales del Movimiento para un Fluido Ideal
(no viscoso) o Ecuaciones de Euler ... ... 15
1.6. Movimiento Potencial de Fluidos Perfectos... 21 1.7. Ecuación de Bernoulli para el Flujo Permanente o Estacionario... 24 I.S. Ecuación de Bernoulli para una Vena Liquida de Fluido ideal, cuando
por Fuerzas de Volumen actúa solamente la Fuerza de Gravedad... 26 1.9. Ecuación de Bernoulli para una Vena Liquida de Fluido Ideal,
bajo Movimiento Relativo... 27 1.10. Interpretación de la Ecuación de Bernoulli... 29 1.11. Ecuación de Bernoulli para una Vena Líquida de Fluido Ideal... 33 1.12. Ecuación de Bernoulli para Corrientes Reales bajo Flujo Permanente
2.1. Digitalización... 39
2.1.1 Imágenes en Escala de Grises... 40
2.1.2. Imágenes a Color... 41
2.1.3. Histogramas... 41
2.2. Tipos de Imagen Digital... 43
2.2.1. Mapa de Bits... 43
2.2.2. Imágenes Vectoriales... 43
2.3. Píxel... 45
2.4. Resolución... 45
25. Profundidad de Color... 46
2.6. Formatos de Imagen... 46
2.6.1. Estándar de Windows... 47
2.6.2. GIF y JPEG: los formatos más utilizados... 47
2.6.3. Otros formatos comunes... 47
2.6.4. Formatos para Internet ... ... 48
2.7. Elementos de los Sistemas de Procesamiento Digital de Imágenes... 48
2.7.1. Adquisición de Imágenes... 48
2.7.2. Almacenamiento... 48
2.7.3. Procesamiento... 49
2.7.4. Comunicación... 49
2.7.5. Presentación... 49
2.8. Compresión de Imágenes... 48
2.8.1. Compresión sin Pérdidas... 50
2.8.1.1. RLE (Run Lenght Encoded)... 50
2.8.1.2. LZW (Lemple Ziv Welch)... 50
2.8.1.3. ZIP ... 51
2.9.1.1. Filtros Suavizantes... 52
2.9.1.2. Filtros Realzantes... 53
2.10. Segmentación de Imágenes... 53
2.10.1. Métodos de Segmentacíón... 53
2.10.1.1. Método Basado en Píxeles... 53
2.10.1.2. Método Basado en Contornos... 54
2.10.1.3. Método Basado en Regiones... 54
2.11. Video... 54
2.11.1. Conceptos Básicos... 54
2.11.2. Video Digital... 57
2.11.2.1. Muestreo,... 57
2.11.2.2. Cuantificación... 60
2.11.2.3. Codificación... 61
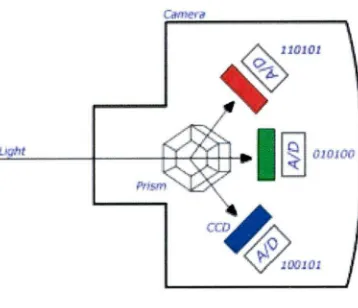
2.11.2.3.1. Formatos de Codificación 61 2.11.2.3.2. Codificación Señales Compuestas 61 2.11.2.3.3. Codificación en Componentes 62 2.12. Cámaras Digitales... 63
2.13. Webcams... 65
2.14. Selección de Cámaras... 66
2.14.1. Mega píxeles... 67
2.14.2. Zoom... 67
2.14.3. Tarjetas de Memoria... 67
3.3. Adquisición de la Imagen...71 3.3.1. ¿Qué eslEEE 1394?...72 3.4. Herramienta de Desarrollo - LabView / " 72
7
4 Capitulo 4 Diseño del Sistema
4.1. Metodología utilizada ... . ... 73 4.2. Descripción del Sistema...73
5. Capítulo 5. Calibración y Pruebas
5.1. Posibles Errores...78 5.2. Pruebas. . ... 79
5.2.1. Pruebas de Altura ... .80
5.2.2. Pruebas de Volumen de Caudal Fugado 80
6. Capítulo 6. Conclusiones
6.1. Conclusiones ... . ... 81
Bibliografia...83 ANEXO 1
Manual de Usuario ANEXO 2
citar que en la ciudad de Loja, según una estimación de la Unidad Municipal de Agua Potable y Alcantarillado (UMAPAL), entre un 40 % y un 50% de la totalidad del agua que se distribuye se pierde por causa de fugas por daños en la red.
El desarrollo de un Sistema de Monitoreo de Pérdidas de Caudal permite que las autoridades puedan enfrentar con éxito la problemática urbana de las fugas de agua potable, que es consecuencia inevitable del tipo de material utilizado, la antigüedad de las tuberías, así como por fallas geológicas. Sin embargo, resulta sumamente dificil implementar un sistema de monitoreo en redes de agua potable ya establecidas (como por ejemplo, la red de agua potable de la cuidad de Loja) debido al tipo de trabajos requeridos en la tubería para la puesta apunto de los elementos necesarios para la adquisición de datos, así como por su alto costo.
El presente trabajo, pretende ofrecer un software para el monitoreo de fugas de agua potable de fácil implementación y a bajo costo, que permite conocer con niveles aceptables de confiabilidad la presencia de fugas para así poder tomar medidas oportunas y adecuadas para una efectiva administración de las tuberías, el cual servirá como prototipo y podrá ser tomado en cuenta en futuros diseños para una mejor administración en las redes de distribución de agua potable.
CAPÍTULO 1
ECUACIÓN DE BERNOULLI
1.1. CONCEPTOS GENERALES
1.1.1 Línea de Corriente
Es aquella línea dentro del fluido en movimiento, cuyas tgeni es a\çualquier punto de dicha línea, coinciden con el sentido de los vectores de velót4ad (figura. 1) en un momento dado de tiempo. No puede pasar fluido a través de ella.
fíi
V/-Figura 1.1 Vectores de Velocidad
En corrientes (flujos) permanentes o estacionarios (aquellas en las que las velocidades y presiones no varían con el tiempo), las líneas de corriente coinciden con las trayectorias; no ocurre lo mismo si la corriente (flujo) es no permanente o irregular (aquella en la que velocidades y presiones son funciones de punto y de tiempo), pues, en este caso, las líneas de corriente no coincidirán con las trayectorias.
1.1.2 Filete de Corriente
También conocido como tubo de flujo, es el contorno que rodea todas las líneas de corriente que pasan por un área elemental.
1.1.3. Vena Líquida
Es la parte de la corriente comprendida en el interior del filete de corriente.
Si la sección transversal del filete tiende a cero, la vena se transforma en línea de corriente. "Los vectores de velocidad son tangentes en todos los puntos del filete de corriente, de modo que las componentes de la velocidad normales a la superficie del filete son nulas; así pues, ninguna partícula de líquido en ningún punto del filete puede penetrar al interior o salir desde la vena líquida, de modo que el filete de corriente semeja una pared impenetrable y la vena liquida se supone una corriente elemental independiente." [1]
1.1.4. Flujo Permanente o Estacionario
Sean:
U, U,, U - componentes de la velocidad U; í U=f1(x,y,z)
U=f2(x,y,z)
U =f3(x,y,z)
u0au
=0
et
ej ''et
1.1.5. Flujo no Permanente o irregular
entonces:
O también:
(Ec. 1.1)
(Ec. 1.2)
Es aquel en el que todas, o por lo menos parte de las componentes de la velocidad U, son funciones tanto de punto como de tiempo.
Matemáticamente:
Í
u =f1(x,y,z,t)1
U
y =f2 (XI y,z,t)1.. U =f3 (XI y,z,t)
O también:
3U 0U
^# O :# & 1 O
at 'et 'et
1.1.6. Flujo Uniforme
Esta clasificación se subordina al espacio como criterio.
(Ec. 1.3)
(Ec. 1.4)
"Se presenta cuando la velocidad media permanece constante en cualquier sección del cauce, es decir, la distribución de las velocidades en cada sección no se altera." [1]
1.1.7. Flujo no Uniforme o Variado
Se produce si la velocidad media cambia a lo largo del cauce. Puede ser: Gradualmente variado, si la profundidad o tirante cambia gradualmente (lentamente a lo largo del flujo); rápidamente variado, si el tirante cambia rápidamente; y, espacialmente variado.
1.1.8. Flujo Ideal
Es aquel en el que no se observa ni rozamiento ni compresibilidad, por lo que se lo considera no viscoso e incompresible.
1.1.9. Trayectoria
1.1.10. Campo Vectorial
Si en cada punto (x, y, z) de una región R del espacio se le puede asociar un vector
V(x, y, z), se ha definido un campo vectorial Y en R.
1.1.11. Movimiento (flujo) plano
O bidimensional, es aquel en el que todas las partículas se desplazan paralelamente a cierta superficie, o sea, el movimiento en todas las superficies paralelas a la superficie dada, es idéntico.
1.1.12. Movimiento (flujo) unidimensional
Es una simplificación que supone que las características del flujo pueden expresarse como funciones de una sola coordenada.
1.2. MÉTODOS DE ESTUDIO DEL FLUJO DE FLUIDOS
"El movimiento de un líquido, como el movimiento de cualquier cuerpo, se determina completamente cuando y solo cuando, es conocido el movimiento de todas las partículas que lo conforman, o sea, cuando la posición de cada una de sus partículas es dada como función del tiempo" [1].
Sea que en cierto momento inicial, por ejemplo, t0, la posición de cada partícula líquida se determina por sus coordenadas iniciales también a, b, c. En los subsiguientes momentos t, la partícula líquida en movimiento cambiará su posición en el espacio y sus coordenadas pasarán, de la posición a, b, c, a posición variable x, y, z, para cada momento de tiempo.
El movimiento del líquido quedará determinado, si para cada una de sus partículas, cuyas coordenadas iniciales eran a, b, c, son dadas las coordenadas x, y, z, como funciones del tiempo t, es decir:
x = x(a, b, c, t)
y=y(a,b,c,t) (Ec. 1.5)
z = z(a,b,c,t),
donde:
a, b, c, t - son argumentos que determinan diferentes funciones que, caracterizan el movimiento de cierta
partícula específica
del flujo, y que se conocen comovariables de
Lagrange.
Si el movimiento es dado en variables de Lagrange, las proyecciones de la velocidad U de una partícula líquida, se determinan por las expresiones:
U. = . ; u = U =, y, (Ec. 1.6)
las proyecciones de la aceleración:
W aX W ' =_
ata'WZ = - (Ec.1.7)
Supóngase ahora una cierta región de cierto espacio, inmóvil, fija, ocupada por líquido en movimiento, a través de cada punto de la cual pasan en forma continua partículas de líquido con una u otra velocidad U, cuyas proyecciones sobre los ejes de coordenadas son:
Ux ,Uy , Uz.
En diferentes momentos t y en diferentes lugares del espacio fijo, las velocidades de las partículas serán, en el caso general, diferentes.
Entonces, esta región fija es posible caracterizarla con un
campo de velocidades
que, en el caso general, como se ha indicado, varían continuamente con el tiempo.De esta manera, para dar la ley de variación de este campo de velocidades, habrá que dar la velocidad U, y consecuentemente sus componentes sobre los ejes de coordenadas
U, ,U,, U, como funciones de cuatro argumentos: tiempo t y las coordenadas de los puntos de la región fija, x, y, z, esto es:
U. =U(x,y,z,t)
U, = U, (X , y, z, t) (Ec. 1.8)
Uz = U(x,y,z,t)
Este método de descripción del movimiento de un fluido se conoce como método
de Euler,
y el conjunto de magnitudes x, y, z, t, son llamadas
variables (coordenadas)
de Euler. Si se conocen las funciones indicadas y sus primeras derivadas respecto a las coordenadas, es posible determinar:• La velocidad
en cualquier punto
del espacio fijado, en cualquier momento de tiempo.•• La velocidad
en un punto dado
del espacio, en cualquier momento de tiempo (En este caso x = const., y = const., z = const.)Dicho en otros términos, "el método de Euler considera el
campo de velocidades como
definidor del movimiento;
o, de otro modo, el estudio del movimiento del líquido con el método de Euler considera como características geométricas del movimiento a laslíneas de
corriente. "[2]
Así pues:
"Si en cada punto del espacio fijo ocupado por fluido en movimiento las velocidades cambian con el transcurso del tiempo, el flujo se conoce como
no permanente o
irregular", [2] y,
"Si en cada punto del espacio fijo ocupado por fluido en movimiento` las vélidades
no
dependen del tiempo, y consecuentemente se mantienen
constdñ'es
durante.todó el tiempo bajo el cual se produce el escurrimiento el flujo se cíóc'orncpern'(anente o
estacionario[2].
1.3. MOVIMIENTO DE UNA PARTÍCULA INFINITAMENTE PEQUEÑA DE LÍQUIDO.- NOCIÓN SOBRE EL MOVIMIENTO ROTACIONAL E IRROTACIONAL
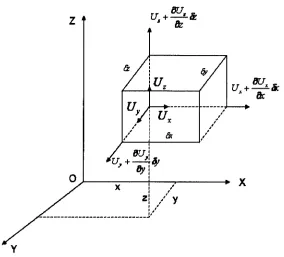
A diferencia de un punto material, con cuyo análisis se inicia el estudio de la cinemática de cuerpos sólidos, la cinemática del líquido se empieza con el estudio de la variación de la forma del volumen de una partícula infinitamente pequeña de ese líquido, pues, una partícula líquida con el transcurso del tiempo puede cambiar no solo su posición, sino también su forma.
Sea un elemento del líquido en forma de paralelepípedo con lados J, 5, 5, paralelos a los
ejes de coordenadas. Sea también que en la esquina de punto x,y,z, las componentes de la velocidad son U, UYU, (figura. 1.2). Si se supone también la continuidad de la función de las componentes de velocidad, éstas (componentes) tendrán diferentes valores en las otras esquinas.
Al tomar la cara más cercana al plano X,Y, las componentes de la velocidad en la dirección de x, y, en las esquinas de ésta cara, son como se muestra en el dibujo (figura. 1.3)
Bajo tales componentes de velocidad, es evidente que la cara tomada no solamente se va a desplazar en el espacio, sino que también cambiará su forma inicial.
&
U
OY U,
+ 5, + L 5
al y
ax
U,
1
ev..
[image:13.568.158.442.109.366.2]Y
Figura. 1.2 Elemento de líquido en forma de paralelepípedo
Y
8U
EV 8V
U +-25
'' 8
"4
Figura. 1.3 Componentes de la velocidad en la dirección X Y
a. Desplazamiento simple de la cara en dirección x y y
b. Variación de la longitud de cada par de lados, es decir, deformación lineal
[image:13.568.149.451.433.650.2]Udt
--- -
ay
---7,
Figura 1.4.a Desplazamiento simple Figura 1.41 Deformación lineal
25j4t
Figura 1.4.e Deformación angular
Figura. 1.4 Desplazamiento y deformación de la partícula Desplazamiento simple:
Ux.dt Uy.dt
Deformación Lineal:
La magnitud de ésta deformación se determina por la diferencia de distancias recorridas por cada par de lados opuestos (ver figuras. 1.3 y 1.4 b))
Ux + &Jdt - Uxdt = [
LUx
+
&
J_Ux]dt = (Ec. 1.9)Para aclarar la deformación angular, sea que el ángulo recto en el punto x,y,z varía. Esta variación se determina por el movimiento angular da y d/3 de los dos lados: & y 8y .
En un infinitésimo de tiempo dt, estos incrementos de tiempos angulares pueden tomarse como sus correspondientes tangentes; entonces, los valores absolutos de los desplazamientos angulares serán:
aux
5ydt
da=
ax
;y, dfl= (Ec. 1.11)de donde,
da = dt 'y, dfl = dt (c 112)
Ox
7
Al utilizarutilizar el producto vectorial del nabla operador V por élvectorr, a
VAa 3. 0 3 Jx(axi+aJ+azk)]=
0a1 3a7 ¡+1 0a Da 'Ij^(-3a 0a '
&- rota
3z Ox ) 3y)
(Ec. 1.13)
Esta magnitud vectorial se conoce como
remolino (torbellino)
orotacional
y también se puede obtener al hacer uso del siguiente determinante:1
- a
rota=VAa=
-a
Donde:
j a a
ayaz
a a
(Ec. 1.14)
i,
j, k -
vectores unitarios en el sentido de los ejes cartesianos X, Y , Z, respectivamente (vectores trirrectangulares)a - proyecciones del vector a sobre los ejes coordenados
V - operador de Hamilton conocido como
operador de nablao nabla operador,
y se define por:a. a. a .a .a a
¿y a
ax
ay azk UY
U,:
07YUy
=WX
Uz=o
De aqui:
OU,:
07
5U
L9 x
Z
y
U
U,
ql
e*^^
coz
El operador nabla goza de propiedades análogas a las de los vectores ordinarios.
Con estos antecedentes, el
remolino
otorbellino del vector velocidad,
o lo que es igual,el rotacional del vector velocidad U,
que también se conoce comovorticidad,
será;i j
rotU=V A U= —
-ay 0-Y
Uxuyuz
au
5U+
3U\.
(au -
(Ec. 1.16)0-y UZ az
j
Al suponer una rotación con velocidad angular co z alrededor del eje O (figura. 1.5), la
velocidad del punto M será U = .r , y sus proyecciones sobre los ejes
O
Yrespectivamente, serán;
Figura. 1.5 Rotación al rededor del eje
O
Entonces;
["UY U1
rotzU= ax T]
CO, 3U
avJ
CO - TOtU
i(au au'
-
zJ
co =
"
i (au au
2
(Ec. 1.19) (Ec. 1.20)
co = 1rotU
2 (Ec. 1.22)
Si en forma análoga se supone la rotación alrededor de los ejes O y O,,, se tendrá:
Donde:
rotU, rot ,,U, rotU - componentes del vector rotacional de la velocidad U. w, coy , coz - componentes del vector velocidad angular.
La magnitud de la velocidad angular se determina por la fórmula:
= Jo).2 + + a, 2 (Ec. 1.21)
En consecuencia, el rotacional del vector velocidad de una partícula líquida puede determinarse por medio del vector velocidad angular a,:
De donde,
ro/U =2w (Ec. 1.23)
y se dice que el
vector vorticidad
es el doble de la velocidad angular. El sentido fisico de la igualdad o desigualdad del ro/U a cero es la siguiente:a) ro/U = 0,
no
hay rotación de la partícula (volumen elemental) líquida. En este caso, el movimiento se llamairrotacional.
En vista de que, cuando rotU = V A U =0 existe un
potencial de
velocidades
ço, lo que da origen a la igualdad U = V (o, en ocasionesU= —V (p), los movimientos
irrotacionales
también se conocen comomovimientos potenciales.
lo que de hecho implica que:
a =0;w y =O;a =0
Cuando esto ocurre, de las expresiones obtenidas para a ' coy , coz , se evidencia que:
1('au au0 az) i(au au,')=Ø
ax)
i(au _!..'10
Ú)z=ax ay)
De aquí, y al ordenar:
au = au ay ax au = au
az ax aUy - auz
az ay
(Ec. 1.24)
(Ec. 1.25)
b) rotU # O, si hay rotación de la partícula (volumen elemental) líquida.
Si esto se presenta, el movimiento se llama
rotacional
ovorticial (de vórtices o
vorticoso).
1.4. ECUACIÓN DE CONTINUIDAD
Se supondrá el flujo en el cual no se produzcan discontinuidades. Esto asegura el flujo en el que no se producen variaciones
cuantitativas
de la masa del fluido en movimiento.Sea una región ocupada por líquido en movimiento, y su contorno,
fijo,
tiene la forma de un paralelepípedo de lados &, 5y, &, paralelos a los ejes de coordenadas (figura 1.6).El propósito es determinar la masa del líquido que entra en un tiempo elemental dt al interior del paralelepípedo, y la (masa) que sale de él (paralelepípedo), en el mismo tiempo.
A través de la cara 1-2-3-4, de lados 6y y ¿5z, ingresa al interior del paralelepípedo un volumen de líquido igual al prisma cuya base es 1-2-3-4, o sea:
KA
&
.., 3
414 & P18
x
Y
Figura 1.6 Líquido en movimiento con forma de paralelepípedo y cuya altura es:
Ux.dt (paralela al eje OX), donde,
Ux - velocidad en el centro de gravedad de ésta cara
De éste modo, el volumen de interés es:
Ux.5y.5z.dt,
y la masa de éste volumen de líquido:
p.Ux.3y.5z.dt
(Ec. 1.27)
(Ec. 1.28) (Ec. 1.29)
Si se supone que la velocidad del líquido y su densidad son funciones continuas, entonces, la masa que sale del paralelepípedo en el tiempo elemental dt a través de la cara 5-6-7-8, será:
p.Ux.Sy.5z4t + a8x.5y.5z.dt (Ec. 1.30)
De forma análoga para las masas que ingresan (entran) a través de las caras 2-6-7-3, de
lados Sz y 5v; y, 3-7-8-4, de lados & y c', en su orden:
p.Uy.Sz.&.dt
p.Uz.&.Sy.dt (Ec. 1.3 1)
Y, las masas que salen por las caras opuestas a las indicadas, respectivamente, son iguales a:
p.Uy.Sz.&.dt + SySz.&.dt
(Ec. 1.32)
La variación de la masa en el interior del paralelepípedo debe ser igual a la diferencia entre las masas
entrantes
a través de las tres primeras caras indicadas y las masassalientes
por las caras opuestas correspondientes, o sea:p.Ux.5y.5z.dt - pUx5y.&.dt + 3) +
ax
• p.Uy.5z.&dt - p.Uy.5z.5x.dt
+ a(,)
5.5z.cíx.dtJ +ay
• p.Uz.5x.5ydt - p.Uz.5x.5y.dt + __ =
az
- [a(pux)
+
a(pUy)
+
Lax
ay
azj
(Ec. 1.33)Ahora bien, la masa del líquido contenida inicialmente
en el interior
del paralelepípedo, sin vacíos ni cavidades, en el momento t, fue: p.8Y 4'.&,Y, en el momento 1+ di, debe ser:
p.&5y.51 +
Por tanto, la masa ha variado en el tiempo dt en la cantidad
dt.&4'.5z
let
Así pues, al igualar (ec. 1.33) y (ec. 1.35):
[a(Pux)
+
a(puy)
8(pUz)cív.
- ay
+
az
]c.&.dt = dt.&4y.5z,Se obtiene:
+ 3(pux)
+
a(puy)
+
a(puz)
=0; o,
at &
ayaz
ap (aux auy
8Uz-+ pl + + - 1=0
at
L
a.v ay az)(Ec. 1.34)
(Ec. 1.35)
(Ec. 1.36)
(Ec. 1.37)
Se toma solamente la derivada parcial Lp, pues, la ubicación del paralelepípedo en el
let
t3Ux eUy aUz -++-= o
ex ¿3y az (Ec, 1.38)
La expresión (cc. 1.37) constituye la ecuación diferencial de continuidad.
Para fluidos incompresibles, o sea aquellos en los que p consi, y consecuentemente,
dp
= 0, la ecuación (ec. 1.37) toma la forma:
di
Esto, evidentemente significa que, el volumen de líquido que entra al paralelepípedo en estudio, es igual al volumen que sale de él, entratándose de un líquido incompresible.
Para el movimiento plano la ecuación de continuidad es:
axay (Ec. 1.39)
En hidráulica, quizá uno de los flujos más comunes es el
unidimensional,
para el cual la ecuación de continuidad se escribe:eux ex
Al multiplicar esta última expresión por wdv, se obtiene: eux
a).—.dx=0
ex
(Ec. 1.40)
(Ec. 1.41) Pero la expresión obtenida es igual al caudal elemental
dQ,
entonces:w.-
ex
--.dx=wdUx=dQ
Al integrar se obtiene el caudal Q:Q=aIdUx=wV ,
-
área de la sección vivaV - Velocidad media
(Ec. 1.42)
(Ec. 1.43)
De esta expresión se colige que la integral IdUx =0 arroja un
valor constante de la
velocidad media
del flujo, o sea, dicha ecuación constituye la"ecuación hidráulica del
importar la variación de las secciones vivas y las velocidades medias en éstas (secciones vivas) a lo largo del flujo,
el caudal siempre es el mismo ";
[3] es decir:Q = aV = = 0)3V3 ...= aV = const (Ec. 1.44)
Y, de aquí se evidencia
la proporcionalidad inversa entre velocidades medias y
áreas de las secciones vivas:
V I =
V2 0)1
que, en palabras significa que
"a mayor área de la seccóniivçi ment velocidad, y
viceversa"
-1.5. ECUACIONES DIFERENCIALES DEL MOVIMIENTO PARA UN FLUIDO IDEAL (NO VISCOSO) O ECUACIONES DE EULER
A más de las características cinemáticas, es menester conocer las fuerzas que actúan en el interior de un fluido.
Para facilitar la realización de éste estudio, es conveniente darle inicio con el análisis de un líquido carente de viscosidad y compresibilidad, o sea, un líquido en movimiento en el que no habrá fricción, lo que es igual, en el que no se producirán esfuerzos tangenciales o cortantes. Para la deducción de las ecuaciones de Euler, supóngase, en la masa del líquido en movimiento, de densidad p , un volumen elemental en forma de paralelepípedo de lados
&, 5y, Sz, sobre el cual actúan las siguientes fuerzas:
- Fuerzas de masa o de volumen, o sea, aquellas que son proporcionales a la masa contenida en el volumen tomado.
- Fuerzas superficiales (de superficie) de presión, que rodean al volumen en análisis y que actúan sobre las caras del paralelepípedo
proporcionalmente a sus áreas. La masa del paralelepípedo (figura 1.7) es:
r7w (Ec. 1.46)
Inicialmente se analiza la relación entre las fuerzas constantes sobre el volumen elemental en el sentido del eje OX y las correspondientes aceleraciones que producen.
Sean las fuerzas de volumen relacionadas con la unidad de masa, o sea, las aceleraciones de las fuerzas de masa, iguales a F, cuyas proyecciones sobre los ejes coordenados son
Así pues, las proyecciones de las fuerzas de masa en dirección del eje OX son:
Fx.pA x5y5z (Ec. 1.47)
Sea también la presión hidrodinámica (debido a que el líquido se encuentra en movimiento) en el centro del volumen elemental igual a p.
La presión hidrodinámica p es función de punto y de tiempo, esto es:
p = p(x, y, z, t) (Ec. 1.48)
wi
Y
&
2
[image:23.567.126.457.231.501.2](
Figura 1.7 Líquido en movimiento en forma de paralelepípedo La presión hidrodinámica sobre la cara 1-2-3-4, es:
¿3p 5x y,
(Ec. 1.49)
sobre la cara 5-6-7-8:
8x2
(Ec. 1.50)
La proyección de las fuerzas de superficie sobre el eje OX es:
-
%. J&& - + .
= -
%5X Y cZ (Ec. 1.51)F—=42'
pax dt
pay dt
paz dt
{
(Ec. 1.55)
La suma algebraica de las proyecciones de las fuerzas que actúan sobre el volumen elemental, deberá ser igual al producto de la masa del volumen por la proyección de la aceleración de su centro:
P5X5Y 5. dt
(Ec. 1.52)dUx
- proyección de la aceleración del movimiento del centro del volumen elemental, sobre
dt
el eje OX. Entonces:
p5x5y5zFx-%5xSy5z
=P5X5Z4I!_X
dt
Y, de aquí:
dUx
pax
dt
(Ec. 1.53)
(Ec. 1.54)
En forma similar se obtiene las expresiones que vinculan las fuerzas y las aceleraciones dirigidas a lo largo de los ejes OY y OZ.
De ésta manera, las ecuaciones diferenciales del movimiento de un líquido no viscoso o ecuaciones diferenciales de Euler para el movimiento de los fluidos perfectos (no viscosos), se expresan: O también: dUx
dt
dUydt
dUz P—-=PFx—%
=pFy—
OPay
=pFz—
OP5z
(Ec. 1.56)
Fs!=1,
pas dt (Ec. 1.58)
donde,
dV 1
—=F---gradp; o,
dt p
(Ec. 1.57)
dV 1
—=F--V p
dt p
Al expresar la ecuación de Euler en proyecciones sobre la línea tangente a la línea de corriente, ésta adopta la forma:
Fs - proyección de la aceleración de las fuerzas de masa sobre la dirección de la línea tangente.
dU
- aceleración tangencial
dt
En general, las componentes de la velocidad U, que son Ux, Uy, Uz, son funciones de punto y de tiempo, esto es:
Ux = F (x, y, z, t)
Uy=F2 (x,y,z,t) (Ec. 1.59)
Uz = F (x, y, z, 1)
de modo que, con base en la regla de diferenciación de funciones complejas, por ejemplo, para el eje OX, la expresión desarrollada para la proyección de la aceleración es:
dUx aUx Ux dx c3Ux dy aUx dz+ .3
- - - + -- + -- (Ec. 1.60)
Si se considera un desplazamiento elemental
ds
sobre la línea de corriente, entonces,dx, dy, dz, son las proyecciones de este desplazamiento, entonces, las correspondientes proyecciones de la velocidad serán:
'fr
Ux=-Uy4
(Ec.161)
Uz= dz— dt
dUx aUx aUx t3Ux aUx
=
—+---Ux+----Uy+---Uz
di
5t
5x
ay
3z
(Ec. 1.62)En forma similar para los otros ejes, las expresiones desarrolladas para las proyecciones de las aceleraciones son:
dUy =
di &
ex ay azdUz aUz aUz
3Uz
3Uz
- - + —Ur + —Uy + —Uz
di at ex
ay az(Ec. 1.63) (Ec. 1.64) Finalmente, en forma desarrollada las ecuaciones de Euler toman la forma:
1 ap aUx aUx c3Ux
—+—Ux+—Uy +—5Ux
Fx--- = Uz
p ax at ayay ez
ay at ayay
p az
1 5p aUx aUz
aUz
aUz
Fz - -- = - + —Ux + —Uy + —Uz
paz &
ex ay azEn forma compacta:
duau au aU au -
= - + Ux + Uy - + Uz
di at
ex
ay az(Ec.
1.65)
(Ec. 1.66)
Al utilizar el operador de Hamilton o nabla operadorV, la aceleración de la partícula líquida (volumen elemental) se expresa, vectorialmente, como:
dUU
—=—+(U.v)u
(Ec. 1.67)di
at
au -
expresa la variación de la velocidad con el tiempo en cierto punto fijo del espacio, oat
sea, es una variación local, por lo cual se le llama componente local de la aceleración o aceleración local.
(U.V)U - caracteriza la variación de la velocidad bajo desplazamiento y se conoce como componente convectiva de la aceleración o aceleración convectiva.
dU - 3Uds
auIs
(U2
t dt - 2
se escribe:
(Ec. 1.68)
1 O au au
Fs----=—+---
as
81 c3sdt' o
p
au
(Ec. 1.69)p Ds Ds ( 2
Es muy importante tomar en consideración el número de incógnitas contenidas en la ecuación de Euler, así:
Las fuerzas de masa, entre las que cuentan la fuerza de inercia del movimiento de traslación, la fuerza de inercia de Coriolis, pero, fundamentalmente la fuerza debida a la
gravedad,
se consideran generalmente dadas.La densidad p se considera conocida, y, para el caso particular y mas común que es el de líquidos incompresibles, se asume constante, o se
recurre a la
ecuación característica, o ecuación de estado,
que determina las propiedades fisicas del fluido:p=yi(p,T) (Ec. 1.70)
p - presión T - temperatura
De ésta forma, en el sistema de las
tres
ecuaciones de Euler se observacuatro
incógnitas:p,Ux, UY, Uz,
por lo que se requiere una ecuación adicional que es la
ecuación de continuidad
anteriormente obtenida.
1.6. MOVIMIENTO POTENCIAL DE FLUIDOS PERFECTOS
El siguiente análisis se refiere a las ecuaciones de Euler en función de los componentes del torbellino, para fuerzas de volumen que tiene potencial.
Como se ha indicado, movimiento
potenc/al o irrotacional
es aquel en el querotU =
O; o, vU=o, y, movimientorotacional o vorticial,
aquel en el querotU
O; o, vU O,Al tomar la primera de las ecuaciones del sistema de ecuaciones (Ec. 1.65) para enfocar primeramente el análisis sobre el eje OX,
1 ap 3Ux
5Ux
5Ux
aUx
Fx
---+---Ux+--Uy+--Uz,
(Ec. 1.71)at
a
ayaz
y con base en el sistema de ecuaciones 1.24
(Ec. 1.72) coz
ay)
(guY aLjx2a)
ax
ay
aUx
jax
co
i(au
5x)
5Ux -.
= 2c),,
ex
aUx =auz
+
2a
(Ec. 1.73)
al reemplazar los valores de
5Ux
y «3Ux porlos obtenidos,ay
Fx—--1 1 8p = --+
3Ux
rau
—Ux+
íau
"
1[
(-2wJUY+I --2wY lUz)] (Ec. 1.74)A
(3Uz
+I--2w
IUz=
Á=
—Ux+
t3Ux
ex
Y )eUx eL T,
-z+Uz+2UzwY =
=—Ux+ Uy 2Uyw
ex
ex
ax(
"ux eUy aUz 2
(UzW Y
-uyw)
—Ux+--Uy+—Uz
1+ex ex ,'
O también, A
= [[ _ +
+ +
2(Uz0, - uya)=
2)
ex
2J
ex 2Jj
e
2)
(
E2_
+2(Uzw-uyw)
Donde,
U2
=U +UY 2
+Uz2Entonces, la primera ecuación diferencial del sistema de Euler, se escribe:
Fx
1e1-
eux +—I -e(U2'
I +2 Uzco —Uyø)
Ye42)
(Ec.
1.75)
(Ec. 1.76)
(Ec. 1.77)
(Ec. 1.78) Y, finalmente, al proceder en forma similar con los otros ejes coordenados, el sistema de ecuaciones diferenciales de Euler toma la forma:
i a aux
3
(U2- uyw)
Fx---=----+----i -
+2p3x 3z'
ex2)-Uz
Fy_!=
+—I —I +2(Uxai3(U2'\tv)
p8y 3t
ayI2)1 a
euze(U2
-
I+2(Uyv -UxvY)
p3z et
3z2)(Ec. 1.79)
Observación
Como se conoce, el trabajo de una fuerza Z aplicada a un punto M se determina por medio de la integral curvilínea
(M2) (M2)
=
f
dA=
J(zxdx + Zydy + Zzdz)(MI) (MI)
Entonces, si 19 es una función que depende de coordenadas, 9 = 19(x, y, z), cuya diferencia es
igual al trabajo elemental de la fuerza Z, esto es:
dA =d19(x,y,z); o, Zxcfr + Zydy + Zzdz = d19(x,y, z),
significa que el trabajo A (M1M2) se puede calcular sin conocer de
antemano la trayectoria
(no depende de la trayectoria) del punto M, o sea,
la fuerza
es función solo de punto y por tanto dichas fuerzas forman uncampo
llamadocampo de fuerzas,
que se define como "la parte del espacio en cada punto del cual, sobre cada partícula introducida en él, actúa una fuerza determinada por su módulo y dirección y quedepende de la posición
de la partícula".La función 19(x, y, z), se llama
función de fuerza.
El campo de fuerzas para el cual existe lafunción de fuerza se conoce como
campo potencial de fuerzas,
y, laenergía potencial
(II) en cada punto del campo potencial de fuerzas, se define como el valor de la función de fuerza tomada
con signo contrario,
o sea:fl(x, y, z) = —19(x, y, z)
Dicho de otra forma,
"energía potencial
de una partícula en una posición M es lamagnitud escalar
II, igual al trabajo que desarrollan las fuerzas del campo (campo potencial de fuerzas) en el desplazamiento del punto desde la posición M a la posición cero (o sea, aquella en la que se considera, por conveniencia, que la "reserva de trabajo es igual a cero"), " [4]11= A(Mo)
Así pues, sea que las aceleraciones de las fuerzas de masa Fx, Fy, Fz, son tales que constituyen derivadas parciales respecto a coordenadas de cierta función H(x, y, z) [función de energía potencial]:
{
311 Ex
:=i ari (Ec. 1.80)
cm
de donde,
El miembro derecho de ésta expresión representa la ecuación de trabajos de las fuerzas de masa referidas a la unidad de masa.
Al tomar la primera ecuación del sistema (Ec. 1.79) y en consideración del valor correspondiente del sistema (Ec. 1.80):
lap aUx
-
+2(Uzw—uyw 2 )
Fx---p5x&3xI%
2)en 1
ap_aux
eÍU2'i+2(UZW_UY W)
at
T)
L911
ie
5t
=aux —uya)
ex
p2
at(Ec. 1.82)
Al proceder en forma similar con las otras dos ecuaciones del sistema (Ec. 1.79), éste [sistema (Ec. 1. 79)], puede escribirse:
eu2 DUX co)
[-
- 2J&=—+2(Uzcv
y —uye(
ey
p
2) ete(
p 2)
(Ec. 1.83)
Estas son las ecuaciones de Euler (a veces llamadas ecuaciones de Euler - Gromaniéko) en función de las componentes del remolino, cuando sobre un fluido perfecto actúan fuerzas de masa con potencial.
1.7. ECUACIÓN DE BERNOULLI PARA EL FLUJO PERMANENTE O ESTACIONARIO
Como se conoce, el movimiento es estacionario cuando:
et obien,
aux auz
en cuyo caso las ecuaciones de Euler (Ec.1.83) se simplifican y quedan:
1-ri-
P
-
u' =2(u_u)
)
a
(
_I_J_E
_U2
2(UxaJ -
Uza,)
;TJ
3 (_II_E_
U
2=
2(U
—Urco)(Ec. 1.84)
Al multiplicar cada una de las ecuaciones obtenidas por fr, d
y,
dz, en su orden,--Í_rI_ R- JL4fr=2(uzc) —uyco»x
5
x
L p2)
a (_II_P_U2
—Jdy = 2(Uxco
-Uzco1y
—Jdx =
2(Uyc) -uxw»z
Al sumar los miembros izquierdos,
(Ec. 1.85)
^_lj
Ox
p
2 )3yI
p
2 p 2, (Ec. 1.86)
=dí-fl----p2
puede observarse que el resultado obtenido de la suma es la diferencial completa de la magnitud encerrada en paréntesis, y, al igualarla a la suma de los miembros derechos, multiplicando ambos miembros por (-1),
d[rI
+
F.
+
= -.[2(uzw
y -Uy w 3
fr+
2(Uxa - Uzw,)dy
+
2 (Uy w -Uxai2
)dz]=
= -2[(Uzco -UyajJx+(Uxw -Uza)Jy+(Uyw -Uxø)dz]
(Ec. 1.87) El miembro derecho de ésta ecuación puede escribirse como determinante, así:'fr
4
rIp
2)Ux
dydz
cv CO,
UyUz
Es evidente que ésta ecuación constituye la ley de variación de la magnitud
(Ec. 1.89)
p2
en todo el volumen del líquido en movimiento.
Para
fluidos irrotacionales,
o sea, para aquellos en los que el miembro derecho de la ecuación (Ec.1.88) esigual la cero,
ésto es,dxdydz
—2cv o) (L) 0,
UxUyUz
la ecuación (ec.1.88) toma la forma, 111+ e. +
p 2)
misma que, al integrarla,
fdífl++-_=H+1+._=cte.
L
p 2) p 2(Ec. 1.90)
(Ec. 1.91)
(Ec. 1.92)
"Esta ecuación, obtenida por D. Bernoulli, constituye la
energía específica
[potencial (n + £."l y cinética o sea, aquella que corresponde a la unidad de masa del fluido enp) 2)
movimiento y expresa la ley de conservación de la energía específica en el flujo de fluidos perfectos, bajo la condición de que se cumpla la expresión "[5] (Ec. 1.90).
I.S. ECUACION DE BERNOULLI PARA UNA VENA LIQUIDA DE FLUIDO IDEAL, CUANDO POR FUERZAS DE VOLUMEN ACTUA SOLAMENTE LA FUERZA DE GRAVEDAD
Del concepto de vena líquida y en consideración de que sus áreas transversales (secciones vivas) son elementales, se puede asegurar que en cualquier punto de una también cualquiera sección viva tomada para el análisis, las velocidades u son iguales.
F =O;F =O;F =–g –df l =+Fy+Fdz
- dH = O + O - gdz –dH=–gdz
dIl=gdz (Ec.1.93)
Al integrar:
JdH=Jgdz
fl
= gz+C 1.94)De éste modo, la ecuación (Ec. 1.92) toma la forma:
n U2 \\ 07
-(gz+C)+.-+--=cte; oA C-' '(Ec. 1.95)
g 2 al dividir entre g y recordar que el peso específico es y =
pU2
z+—+—=cte (Ec.1.96)
y 2g
Si se toma dos secciones arbitrarias, por ejemplo, 1-1, 2-2, la ecuación de Bernoulli para un avena líquida elemental de fluido ideal queda:
2
(Ec.1.97)
y 2g y 2g
1.9. ECUACIÓN DE BERNOULLI PARA UNA VENA LIQUIDA DE FLUIDO IDEAL, BAJO MOVIMIENTO RELATIVO
En éste caso, que tiene amplia aplicación en turbinas radiales y radioaxiales, a mas de la
fuerza debida a la gravedad, se cuenta con la fuerza centrífuga de inercia del movimiento de
arrastre y la fuerza de inercia de Coriolis [si bien el trabajo de ésta última (de Coriolis) en el desplazamiento relativo es igual a cero, pués, la fuerza de inercia de Coriolis
es
perpendicular
a la velocidad relativa].El presente caso tiene lugar cuando el líquido se mueve en un cauce que a su vez está sometido a una rotación uniforme (figura 1.8) de velocidad angular constante v.
Adicionalmente a la aceleración de la gravedad g, existe la aceleración 0)'r debida a la fuerza
r— distancia (radio) ala que se encuentra la
partícula en análisis desde el eje de rotación
fi
r
r
Cauce gua gira con velocidad angular 4si
yalo largo del cual
pesa líquido 4,¡
[image:35.567.116.455.126.330.2]U2
Figura 1.8 Cauce que gira con velocidad angular
De éste modo, las componentes de las fuerzas de volumen sobre la masa líquida igual a la unidad son:
(Ec. 1.98)
F =w2x;F =w2y;F =—g
y la ecuación
—dH =Ffr+Fdy+Fdz,
toma la forma:
—dfl=w2xdx+co2ydy—gdz;o, dll=—a,2xdx—w2ydy+gdz
Al integrar,
j•dH = _J2xdx_fw2ydy+$gdz
_0)2 --co —+gz+CX 2
2 2
H=.(x2 +y2)+gz+C
(Ec. 1.99)
(Ec. 1.100)
2 = x2
+y2
x
Y
pU2
z + - + - = cte
y 2g (Ec. 1.105)Figura 1.9 Eje de coordenadas X Y Z se obtiene
fl=gz–'° +C, (Ec. 1.102)
y la ecuación de Bernoulli (Ec. 1.92) para una vena líquida de fluido perfecto en movimiento relativo se puede escribir:
" a)r U2
-
—+—=cte; o,
gz
2
J
2pU2 2
gz +—+---r
=cte;
(Ec. 1.103)p2 2
Al tomar dos secciones 1-1 y 2-2, arbitrarias, si se divide ambos miembros entre g y en consideración de que y = pg; además, al tener presente que aquí U, y U2 son
velocidades
relativas del movimiento de la partícula en estudio, o sea, velocidades de la partícula líquida
con relación a las paredes del cauce,
finalmente se tiene:rr 2 2 2
2 U22
2 2
z1
'
= z2 + —+---r
2 ; o,
r 2g 2g y 2g 2g
2 2
z 1 + + U
1 2 2 P2 U2 C O 2
- ---? =Z
2+--t-pg 2g 2g pg - ._r2(Ec. 1.104)j
1.10. INTERPRETACIÓN DE LA ECUACIÓN DE BERNOULLI
Del mismo modo, en vista de que para obtener la ecuación (Ec. 1.97) se tomo dos secciones arbitrarias 1-1 y 2-2, ésta ratifica lo indicado, o sea:
2 TT2
ZI + + = z 2 + + = const (Ec. 1.106)
y 2g y 2g
Al analizar las dimensiones en las que se miden cada un de los componentes del miembro izquierdo de la primera de las citadas ecuaciones, se tiene:
(z) - es una magnitud ideal que determina la posición de la partícula sobre el
plano
de referencia,
por lo que se conoce comoaltura de posición, altura de nivel,
altura geométrica, altura topográfica o altura geodésica [z} [L]
(ri-se conoce como
altura piezométrica o altura de presión,
porque determina la posición que, por efecto de la presión, una partícula puede ocupar. Es tambiénuna magnitud lineal, pues: [p]=[F
:ILI
L Lj
-
También es unamagnitud lineal
que se conoce comoaltura de velocidad
2g,
o
altura cinética,
debido a que representa la altura a la que se elevaría la partícula líquida que empezare a moverse con una velocidad vertical U , sin encontrari resistencia a su paso. 157S'L2 :
- IL
L
T2J
Así pues, la ecuación de Bernoulli puede enunciarse así:
"Para una vena líquida de fluido ideal, la suma de las tres alturas: de posición,
de presión y de velocidad, es una magnitud constante ";
[6] o también,"La suma de las tres cargas: geométrica, piezométrica y de velocidad, es
constante a lo largo de una vena líquida de fluido ideal" [6].
Desde el punto de vista
energético,
y al tener presenta queenergía específica (e)
es aquella energía (E) que corresponde a la unidad de peso (G),E e= — G'
la ecuación de Bernoulli puede interpretarse así:
(Ec. 1.107)
(Ec. 1. 108)
óG
- energía específica de presión hidrodinámica (del fluido en movimiento), pués, la Y
partícula líquida de peso 5G, sometido a la presión p, está en condiciones
de elevarse a un altura £. y así obtener la energía de posición igual a . . A la
Y Y
unidad de peso corresponde el valor
15G
Y
L.
(Ec. 1.109)Y
U2
- - energía
cinética
específica, en virtud de que para una partícula de peso t5G, la 2genergía cinética que corresponde a la unidad de peso es igual a
TT2
2g (Ec.1.110)
óG 2g
Al sumar z y E se obtiene
la energía específica potencial
del líquido en movimiento, oY
sea,
z + = energía específica
potencial, y,
(Ec. 1.111) Yal sumar z, 211 y -, se obtiene la
energía específica total
(H) del fluido eny 2g movimiento:
H = z + + = const a lo largo de la vena líquida de fluido ideal. (Ec. 1.112)
y 2g
A mas de las formas indicadas y en vista de que, de lo deducido se colige que la ecuación de
Bernoulli expresa
la ley de conservación de la energía mecánica para un fluido
ideal en movimiento,
puede enunciarse esta ecuación así:o
Linee de energla total
Plano de referencie o datuín
Figura 1.10 Gráfica de las energías específicas
Como puede observarse del esquema (figura 1.10), la
línea piezométrica
es la variación de la altura de presión; o, dicho de otra forma, es el lugar geométrico de los extremos superiores de los tramos verticales constituidos por la suma f z +z7
J
-%s
En vista de que cada término de la ecuación de Bernoulli, como se ha demostrado, constituye una forma de
energía específica
(energía por unidad de peso), sus términos, , suelen expresarse en unidades de energía por unidad de peso (en ocasiones, en unidades de energía por unidad de masa y también, en unidades de energía por unidad de volumen), ésto es:[F.L] [N.ml julios en el sistema SI
[ [] N
F.L1 [Kgj.ml r,alogramefrosl en el sistema MKGFS [j K gfK g
ra'r42
E
;:
2g Línea piezométnca
p
o o
1.11. ECUACIÓN DE BERNOULLI PARA UNA VENA LÍQUIDA DE FLUIDO IDEAL
Sea para el análisis la ecuación (Ec. 1.97)
2 2
p U1 p
z 1 +—+—=z 2 +—+— U2 ,
y 2g y 2g (Ec. 1.113)
que, como se ha indicado, es constante a lo largo de la vena líquida de fluido ideal.
Ahora bien, "cuando el fluido es real, o sea, cuando es viscoso, el valor de la energía específica mecánica no puede permanecer constante; pués, la energía específica en una
vena líquida de fluido real bajo movimiento permanente, tendrá indefectiblemente que
disminuir a lo largo del flujo, debido a que parte de ésta energía irreversiblemente se
transforma en energía calorífica y se "gasta" en vencer las resistencias, sean éstas locales o por fricción que se presentan debido a la viscosidad" [3].
En tal virtud, para el caso señalado (vena líquida de fluido real) (figura 1.11), la ecuación de Bernoulli se presenta así:
,
+RL+!_=z
2 (Ec. 1.114)y 2g y 2g
hperdidc,g - son las pérdidas entre las secciones 1-1 y 2-2, o sea, parte de la energía
específica que se gasta en vencer las resistencias; o, en términos energéticos, es el trabajo de todas las fuerzas de resistencia al flujo, relacionado con la unidad de peso del líquido real (viscoso), al desplazarse ésta (unidad del peso del líquido real) desde la sección 1-1 hasta la sección 2-2.
El siguiente esquema ilustra lo indicado
Plano de referencia o datum
1.12. ECUACIÓN DE BERNOULLI PARA CORRIENTES REALES BAJO FLUJO PERMANENTE Y UNIFORME O LENTAMENTE (GRADUALMENTE) VARIADO
Sea que un fluido se mueve desde la sección viva 1-1 a la sección viva 2-2, bajo condiciones de movimiento permanente y gradualmente variado; además, sea que las energías potenciales
específicas correspondientes a cada sección, z1 + Pl y z2 + en su orden, tienen valor
Y Y
constante (cada una en la sección respectiva), toda vez que para ellas se cumple la ley fundamental de la hidrostática
z+=const (Ec.1.115)
Y
A ésta energía hay que añadir la energía cinética específica.
Si en todos los puntos de la sección viva 1-1 las velocidades fueran idénticas e iguales a la
velocidad media V, la energía cinética específica sería -, pero, las velocidades en la 2g
sección 1-1 son
diferentes y
por ello no es posible de primera expresar la energía cinética específica a través de dicha velocidadmedia
V1 ; así pues, "para poder hacerlo se requiereintroducir un coeficiente adimensional conocido como
coeficiente de Coriolis,
cuyafunción es considerar la irregularidad de la distribución de las velocidades por la
sección" [6], se denota con la letra griega a y su valor es:
3
$U3d
a =
dw ; o,
a = a' (Ec. 1.116)De esa manera, la energía cinética específica en la sección 1-1 es alrí,/, y la energía
específica total:
H1 = , (Ec. 1.117)
y 2g Así mismo, en la sección 2-2:
H2 =z 2 L2 + a2 V2
(Ec. 1.118)
Y 2g
Como se trata de corriente real (figura 1.12), siempre se cumplirá: H1 > H2 , pues, como se ha indicado, parte de la energía se gasta en vencer las resistencias.
2 +F-1-+ 2 =Z2
1 +F-i-+Ct2 V2 h
perdí dasl-2 ,
y 2g y g
pi
1
Línea piezométrica
(Ec. 1.119)
E a 22V2
Zg
/
zi
[j o
Plano de referencia o datum
Figura 1.12 Flujo permanente y uniforme
"Para corrientes
laminares
el coeficiente de Coriolis a = 2; para corrientesturbulentas,
a = 1,0 a 1, 10. En corrientes laminares la velocidad se distribuye"mas irregularmente"
por la sección que en corrientes turbulentas" [2].Esta es entonces la explicación de porqué en corrientes laminares el coeficiente de Coriolis tiene un valor mayor que en turbulentas.
1.13. APLICACIONES PRÁCTICAS DE LA ECUACIÓN DE BERNOULLI
La ecuación de Bernoulli tiene una amplia aplicación en la resolución de problemas de orden práctico. Con base en ella se ha obtenido una serie de fórmulas y expresiones de cálculo para diversos casos de movimiento de fluidos; además, ésta ecuación permite resolver innumerables problemas de carácter teórico y práctico relacionados con el diseño y cálculo ora de obras hidráulicas, ora de máquinas hidráulicas.
estrangulación o caudalímetro, cuya fórmula para determinar el gasto se obtiene de aplicar la ecuación de Bernoulli.
La ecuación de Bernoulli constituye la base para el estudio del comportamiento hidráulico de vertederos, orificios, boquillas, tuberías, canales, etc.; es decir, en hidromecánica es raro el caso de flujo de un fluido en el que no intervenga ésta ecuación.
1.14. MEDIDOR DE VENTURI O FLUIDOMETRO DE ESTRANGULACIÓN
"Está constituido de un tramo corto de tubo con estrangulación en el medio (figura 1.13). La parte anterior que se estrecha en el sentido de la corriente se conoce como confusor, la parte estrecha central, garganta y la del extremo que se ensancha, se denomina difusor.
En el tubo (inmediatamente antes de entrar al conflisor) y en la garganta se instalan piezómetros (o un manómetro diferencial en "U"), para observar las diferencias de presión y con ello determinar el caudal y las posibles variaciones que puedan producirse en el transcurso del tiempo" [6], como se explica a continuación
Al aplicar la ecuación de Bernoulli a las secciones 1-1 y 2-2, con respecto al plano de comparación 0-0, sin tomar aun en cuenta las pérdidas, dado que son prácticamente despreciables debido a que las distancias entre las secciones tomadas es relativamente corta y a que la conicidad del confusor es muy gradual; sinembargo, éstas (pérdidas) serán consideradas mediante el coeficiente p que asomará luego y cuyo valor, en todo caso, es cercano a la unidad.
a1 1,0 - coeficiente de Coriolis que se los puede asumir aproximadamente igual a la unidad bajo la consideración de que el régimen será turbulento (en problemas de orden práctico el régimen turbulento es el mas común).
L!J
2 2
,
+R+
al Vi = 2+R+
a2V 2 +hperdy 2g y 2g (Ec. 1.120)
hperd - no se las toma en cuenta por el momento porque son muy pequeñas.
zi + RL] -
i:z2 +
= a2V2 - aV 2 =
-y) 2g 2g 2g 2g
zi + RL] - [ 2 +
RL]
= hTT2 2
h='22V2
a1V1= —1 1v2 2V2)
2g 2g 2g
Con aplicación de la ecuación de continuidad:
Q=V1t»1 •V0)2
rD2
D2
2 1 1 j2
V2 v2D4
Entonces,
h=-!íV 129__V 2 V1 2 (D
2g d4 1
-d'
2g d4 J
De aquí:
V 2=2gh_d4
VI ^d
Z
2gh(Ec. 1.121)
(Ec. 1.122)
(Ec. 1.123)
,2[4
QV )1
Al llamar
j2
r'4
—k 4D—d
Q=k1j
(Ec. 1.125)
(Ec. 1.126)
Como se ha indicado, las pérdidas de carga son casi despreciables, sin embargo pueden ser consideradas con el coeficiente p , cuyo valor varia entre 0,94 y 0,99. Cuando el medidor es nuevo, el valor de p suele tomarse 0,985; y, cuando el medidor es usado 0,980.
Al adoptar p = 0,970, se tendrá; j2 ¿^d
44—d
Q=k2-JJ (Ec. 1.127)
Si se adopta el valor de la aceleración de la gravedad g = 9,8m/s2
Q = k2 1 Ji = k2 i 9162 -.f/
finalmente, al hacer k2 [19,62 = k
se obtiene;
Mallado cuadrangular Mallado hexagonal ...
Razas ... ...
CAPITULO 2
PROCESAMIENTO DIGITAL DE IMAGENES
2.1. DIGITALIZACIÓN
Una imagen natural capturada con una cámara o cualquier otro tipo de instrumento óptico presenta una variación de sombras y tonos continua. Imágenes de este tipo se llaman imágenes analógicas.
Para que una imagen analógica, en blanco y negro, en escala de grises (las llamadas comúnmente, imágenes en blanco y negro), o a color, pueda ser "manipulada" usando un ordenador, primero deben convertirse a un formato adecuado. Este formato es la imagen digital correspondiente. La transformación de una imagen analógica a otra discreta se llama digitalización y es el primer paso en cualquier aplicación de procesamiento de imágenes digitales.
El proceso de digitalización consta de dos partes: muestreo y cuantificación
Un muestreo consiste en una subdivisión de la imagen analógica en porciones.
Lo mas común es utilizar particiones que envuelven polígonos regulares, esto es, polígonos con lados y ángulos de valor constante en todos ellos. Se pueden usar tres tipos de polígonos regulares (figura 2.1): triángulos, cuadrados y hexágonos.
Figura 2.1 Tipos de mallado
Estos polígonos representan sensores sensibles a la intensidad de luz. La salida de estos sensores es un valor (amplitud) dentro de una escala (color).
escala de colores también tiene un rango discreto (por ejemplo, de 8-bits = 256 valores). Las
imágenes en escala de grises con sólo 2 colores: blanco y negro (O y 1, respectivamente), se
llaman imágenes binarias.
A este proceso de discretización del color se le llama cuantificación. Un polígono de color
constante se le llamará píxel.
2.1.1. Imágenes en escala de grises
El siguiente, es un ejemplo de digitalización de una imagen (figura 2.2). El muestreo se ha hecho usando un mallado cuadrangular de 9 por 9 cuadrados y la cuantificación consiste en una pateta de 256 niveles de gris (donde O indica el color negro y 255 el color blanco):
Analog Image Digital Sampflng Pixel Quanlizaton
.f•r
%
b
Figura 2.2 Digitalización de una imagen
En el siguiente ejemplo (figura 2.3) se puede observar que, partiendo de una misma imagen, es muy diferente la imagen digital obtenida, dependiendo del mallado que se escoge:
4 b
.)
(a) (c)
175x 175 88 x 88 58 x LB
.i. ? '1
.'II
(d)
44 x 44 22 x 22 11 x 11
Figura 2.3 Misma imagen con diferentes mallados
¿Qué muestreo y cuántos niveles de gris son necesarios para una buena aproximación? La
resolución de una imagen depende estrechamente de estos dos parámetros. Cuanto mas se
incrementan, más se aproxima la imagen digitalizada a la original.
La cantidad de niveles de gris y la finura del mallado que se escoja, deben producir una imagen digital aceptable, en el sentido de que no sea perceptible al ojo humano el paso de un color a otro, entre dos píxeles consecutivos.
Sin embargo, se debe tener en cuenta que si el muestreo consiste en un mallado de N por M cuadrados y el número de niveles de gris permitido son entonces el número de bits necesarios para almacenar una imagen digitalizada es: N x M x k
Por ejemplo, una imagen de 128 x 128 con 64 niveles de gris necesita 98.304 bits = 12 KB de memoria. Una de 256 x 256 con 132 niveles de gris necesita 458.752 bits = 56 KB. Y una de
1024 x 1024 con 256 niveles de gris necesita 8.388.608 bits = 1024 KB = 1 MB.
En el modelo matemático de una imagen, un pixel se identifica con su centro, pudiendo representar los píxeles como puntos (x,y) del plano, donde (x,y) son las típicas coordenadas cartesianas.
2.1.2. Imágenes a color
Las imágenes digitales a color están gobernadas por los mismos conceptos de muestreo, cuantificación y resolución que las imágenes en escala de grises. Sin embargo, en lugar de un único valor de intensidad que expresa el nivel de gris, los píxeles de las imágenes a color están cuantificados usando tres componentes independientes uno por cada color primario (RGB: rojo, verde y azul). Combinando distintas intensidades de estos tres colores, podemos obtener todos los colores visibles.
2.1.3. Histogramas
Si tenemos una imagen en niveles de grises, siendo el rango de 256 colores (de O a 255), el
histograma de la imagen (figura 2.4) consiste en una gráfica donde se muestra el número de
píxeles de cada nivel de gris que aparecen en la imagen. En el siguiente ejemplo podemos ver tres imágenes con sus correspondientes histogramas.
1(a) 1 1 í''1
1
1 4W1
1
(b) Normal
O Gray Leve¡ 255 (d) — 10w
cofltraMj
O Gray Leve¡ 255 (f)
Hl*h Confraat
o L
1lI1
O Gray Level 265
Figura 2.4 Histograma de una imagen en escala de grises
El análisis estadístico derivado del histograma puede servir para comparar contrastes e intensidades entre imágenes. El histograma podría ser alterado para producir cambios en la imagen.
Por ejemplo, el histograma es utilizado para binarizar una imagen digital, es decir, convertirla en
una imagen en blanco y negro, de tal manera que se preserven las propiedades "esenciales" de la imagen. La forma usual de binarizar una imagen es eligiendo un valor adecuado L dentro de los niveles de grises, tal que el histograma forme un "valle" en ese nivel. Todos los niveles de grises menores que L se convierten en O (negro), y los mayores que L se convierten en 255 (blanco). El histograma de una imagen a color RGB (figura 2.5) consiste en tres gráficas siendo cada una el
histograma de cada color primario:
1.
Cc,rnbned (RGB)
1
C hanneis
Color Digital Image O
Red Green
Channe Channel
ii
xl xl
O Red Leve¡ 255 0 Green Leve¡
RGB Levcls 255
Blue
Channel
UF xl
O Blue Leve¡ 255
Figura 2.5 Histograma de una imagen a color