Construcción de un prototipo de cámara de cría avícola con control de temperatura basado en lógica difusa
85
0
0
Texto completo
(2) Instituto Tecnológico y de Estudios Superiores de Monterrey Campus Ciudad de México. de Monterrey. Construcción de un prototipo de cámara de cría avícola con control de temperatura basado en lógica difusa. 11,ESM ~l,IPUS CIUDAD ür,' MEXJCO Bl BL!OT&Ll.4.. Cynthia Jiménez Espinosa Juan Pablo Cibrián Jaramillo Nino Ernesto Castrejón Castillo. Mayo 200~i.
(3) L(E + G ,A - P r?O. s f'i~f'. S55 .2 o o ~. {;"1'. 1.
(4) a mi familia sin la cual esto no sería posible a los profesores que creyeron y confiaron en mí.
(5) ~14 t'0i}f ~. a Angélica por su gran ejemplo y porque siempre estaremos recogiendo los frutos del éxito sin importar las distancias, cuál galaxias o estrellas rojas ....
(6) a mi hermano Juan Carlos y mis hermanas Lupita y Naty para que sigan sus sueños a mis papas y abuelitos, gracias por el apoyo .. ..
(7) Agradecimientos. Al lng. Israel Macías Hidalgo, por su contribución y seguimiento al proyecto desde su inicio. Al M.C. Flavio Lucio Pontecorvo Cassereau por su apoyo y compafiía a través de los dos períodos de trabajo. Al Dr. José Ramón Álvarez Bada y al Dr. Alfonso Torres Parra por su guia durante la realización del proyecto. Al Dr. Marco Antonio Paz Ramos por su indispensable ayuda en el desarrollo del proyecto. Al Dr. P•~dro Ponce Cruz por sus valiosos consejos sobre el control difuso y su implementación..
(8) Índice. 1. Introducción..................................................................................................... O. 2.. 1. Control Automático basado en Lógica Difusa...................................................... 2.1. 2.2. 2.3. 2.4. 2.5.. 3.. Introducción........................................ ............................................... Inferencia Mamdani... ... ... ... ... ... ... . .. ... ... ... ... ... ... ... ... ... ... ... ... . . . ... ... ... ... . Inferencia Sugeno... ... ... ... ... ... .. . ... ... ... .. . ... .. . ... ... ... . .. ... ... ... ... ... . .. . .. ... ... Comparativa..................................... ................ . ................................ Estabilidad.......... ....................................................................... ......... 1 2 6 6 7. Diseño del sistema............................................................................................ 10. 3.1. Diseño del prototipo de cámara de cría... . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . . . . . . . . . . . . . . . . . . . .. 1O. 3.2. Diseño de Control Difuso PI de primer ordEm... ... ... ... . .. ... ... ... ... .. . ... ... ... ... ... 3.2.1. Definición de funciones de membresía..... . ........ . ........ .. ...... 3.2.2. Definición de reglas................................................ ........ 3.2.3. Cálculo de Parámetros dHI Polinomio................................ 3.2.4. Diagrama de Flujo del Controlador..................................... 11 12 15 15 17. 3.3. Simulación del sistema de control en MATlAB... ... ... ... ... ... ... ... ... .. . ... ... ... ... .. 22. 3.4. Diseño electrónico del sistema.......................... . ................ ............... ...... 3.4.1. Diagrama a bloques...... . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4.2. Adquisición de datos....................................................... 3.4.3. Procesamiento digital de señales...................................... 3.4.4. Etapa de Potencia.......................................................... 3.4.5. Consumo de potencia del prototipo............ .. ... . ... ... .. ........... 32 32 32 35 37 40. 4.. Pruebas al prototipo........................................................................................... 41. 5.. Conclusiones.................................................................................................... 45. 6.. Bibliografía....................................................................................................... 46. 7. Anexos............................................................................................................ 7.1. 7.2. 7.3. 7.4. 7.5. 7.6.. Conceptos de Lógica Difusa.......................... . ........................ ................ Introducción a la producción avfcola.............................................. ........... Características de sensores, actuadores y microcontrolador.......................... Imágenes del prototipo........................................................................... Costos................................................................................................ Programas en ensamblador (lntel 8051) y tablas en memoria (incluido en el CD adjunto). 48 48 57 59 74 76.
(9) 1 Introducción El presente trabajo corresponde a la investigación, diseño e implementación de un control automático basado en lógica difusa. A través de los periodos de trabajo agosto-diciembre de 2003 y enero-mayo de 2004 fue diseñado y construido un prototipo de un sistema de regulación de temperatura basado en lógica difusa, eficiente y de bajo costo, para la cría y conservación de producción avícola en temperaturas no extremas y en interiores. El prototipo cumple con los parámetros de luminosidad y humedad recomendados por el asesor experto en producción animal. Este proyecto surgió a partir de la necesidad de mejorar los sistemas de cría actuales para generar una producción eficiente y competitiva; con la finalidad de hacer económicamente accesible el sistema a los PyMEs a largo plazo. Tomando en cuenta lo anterior se eligió diseñar un sistema de regulación que fuera sencillo y económico a través del control con lógica difusa. El control automático basado en lógica difusa permite evaluar y tomar decisiones sobre el comportamiento de un sistema mediante una interfaz natural e intuitiva manejada por variables lingüísticas. Una de las ventajas de este tipo de control a diferencia de métodos clásicos es que está basado en la experiencia y no requiere de un modelo matemático de la planta. El controlador difuso elegido para el prototipo es de PI (proporcional integral) de tipo Sugeno de primer orden, el cual fue implementado en un sistema basado en un microcontrolador ATMEL de arquitectura MC51. El control se realiza a través de nueve reglas heurísticas del tipo "Si x y y, entonces z", donde x y y son entradas al sistema y ;~ es la salida, la cual corresponde a la acción a ejecutar sobre el sistema. Los parámetros de temperatura que se desean alcanzar son 34°C y 29°C para las dos modalidades posibles del sistema, incubadora y nacedora. La humedad debe ser un parámetro constante de 37% de humedad relativa en ambas fases. Los parámetros de luminosidad apropiados son 400 candelas para fase 1 y 250 candelas en fase 2.. Este documento está dividido en los siguientes capítulos: a) Lógica difusa. Se tratan conceptos y definiciones básicas sobre el tema y su aplicación al control automático. b) Diseño del sistema. Se detalla el diseño del prototipo, la implementación electrónica y el diseño del controlador difuso. c) Pruebas al prototipo. Se evalúa el desempeño del controlador sobre el prototipo construido. d) Conclusiones. Se discute sobre el resultado final y se proponen mejoras. e) Anexos. Se incluyen archivos, diagramas y documentos utilizados durante la realización del proyecto.. o.
(10) 2 Control Automático basado en Lógica Difusa. 2.1 Introducción Ventajas y desventajas. Las ventajas de usar lógica difusa aplicada en control son: i) Interfase natural entre una variable lingüística (human-like) y un sistema computacional. ii) Provee estimación sin conocer a detalle la planta cuando el sistema es complicado o imposible de modelar matemáticamente iii) Es útil en modelos altamente no-lineales Desventajas:. i) Métodos limitados para análisis y síntesis del sistema ii) Puede crear funciones discontinuas que se traducen en un sistema electrónico computacional como ruido granular. iii) La estabilidad del sistema es difícil de caracterizar. Modelos. Desde el punto de vista de un proceso lo importante es cómo es procesada su no-linealidad, no cómo es parametrizada [Bauer, 2000). A grandes rasgos podemos caracterizar un sistema de control mediante álgebra de bloques como sigue:. señalde B contra!. Control8dor - - Difu so. 1. Sahda. Planta. ~---~. en-ar. Figura 2. 1. 1 Controlador difuso. Para un sistema difuso se realizan las etapas señaladas en la figura 2.1.2. El proceso comienza con una interfaz de entrada de retroalimentación hacia el mecanismo de inferencia. Dicho mecanismo provee de una salida que es alimentada hacia la planta que se desea controlar. Planta/ Proceso. Interfaz de salida. Mecanismo. de inferencia. Interfaz de entrada. Figura 2.1.2 Diagrama a bloques especificando el mecanismo de inferencia. 1.
(11) Las etapas básicas del mecanismo de inferencia son: Sislema difuso. Base del conocimienlo. Dcsdifusifica<lor. Inferencia. Figura 2.1.3 Mecanismo de inferencia. Los pasos a seguir para diseñar e implementar un sistema de control basado en lógica difusa son los siguientes: a) Definir el problema y las variables lingüísticas b) Construir reglas difusas c) Inferencia (difusificación, evaluación de reglas y desdifusificación). d) Evaluar y calibrar el sistema. El mecanismo de inferencia, la parte más importante del análisis de lógica difusa, consta de 4 partes fundamentales como lo establece la figura 2.1.3: a) Difusificación. Es la traducción de las variables ele entrada a un conjunto difuso que consta de funciones de membresía. Las funciones de membresía asignan un grado de pertenencia a cada elemento de una variable dentro del sistema. b) Base de conocimiento. Es el conjunto de reglas y proposiciones que incorporan el conocimiento experto. c) Inferencia. Calcula el grado de pertenencia de cada regla y su relación con las demás para formar un conjunto de salida, puede ser realizado mediante 2 métodos importantes: Mamdani y Sugeno. d) Desdifusificación. Fundamentalmente consiste en obtener un valor único (crisp) que mejor represente la salida del sistema.. 2.2 Inferencia tipo Mamdani Se compone de las siguientes etapas principales: a) Difusificación de las variables de entrada. b) Evaluación de reglas c) Agregación de todas las salidas d) Desdifusificación. 2.
(12) Difusificación y estructura de reglas. Como se mencionó anteriormente, la difusificación consiste en analizar el grado de pertenencia que tiene un valor de entrada con los conjuntos definidos en el sistema, mediante la función de membresía. µ A ( x). Un ejemplo de cómo Mamdani realiza este primer paso se encuentra en la figura 2.2.1:. 0.7. 0.3. T cu41cra1ur,1 15. Figura 2.2. 1 Ejemplo de evaluación de pertenencia de un valor crisp con los conjuntos difusos. En la figura anterior se definen los distintos grados de peirtenencia de la siguiente manera:. µ,_ow (15) = 0.7 µ 0 K (15) = Ü.3 µH/GH. (15) = O.O. Existen distintas formas de funciones de membresía que pueden ser empleadas para describir mejor al sistema. La forma a implementar es seleccionada en función de analizar qué curva describe mejor la variable a tratar, siendo las principales, las triangulares, gaussiana, trapezoidales y singleton .. ..J f.. ·Ú. G. .e ..1. -O 2. Conjunlos difusos. Figura 2.2.2 Distintas funciones de membresía para los conjuntos difusos. En esta etapa es cuando se definen las reglas del controlador. Con base a las necesidades se 1 construye una tabla de reglas con sus respectivas membresías de la siguiente manera : a). 1. El primer paso es diseñar las variables de entrada y sus valores lingüísticos.. Éste es un ejemplo de cómo se elaboraría un conjunto de reglas para el control de temperatura. 3.
(13) Entradas: i) Error. Positivo(P), Negativo(N), Zero(N) ii) Derivada del error. (P), (N), (Z). Salidas: i) Conclusión: Heat(H), NoChange(NC), Cool(C) donde: Error = Referencia-retroalimentación y puede tener los valores P=Muy frío, Z=ldeal, N=Caliente. Derivada del error = d(error)ldt y puede tener los valores P=Calentándose, Z=Estacionario, N=Enfriándose Conclusión H=Accionar calentamiento, NC=No cambiar nada, C=Accionar enfriamiento b). Se construye la tabla que relacione las variables de entrada con la acción a tomar.. Estructura de Reglas Antecedente Si el error es N v de/di es N entonces Si el error es Z y de/dt es N entonces Si el error es P y de/di es N entonces Si el error es N v de/dt es Z entonces Si el error es Z v de/dt es Z entonces Si el error es P v de/di es Z entonces Si el error es N y de/di es P entonces Si el error es Z v de/dt es P entonces Si el error es P y de/dt es P entonces. Consecuente la salida es C la salida es H la salida es H la salida es C la salida es NC la salida es H la salida es C la salida es C la salida es H. error N. z. p. N. e. H. H. z. c. NC. H. p. c. c. H. deldt. Figura 2.2.3 Ejemplo de estructura dE1 reglas de un controlador. Evaluación de Reglas La manera en que la inferencia de tipo Mamdani emplea los operadores básicos de conjuntos difusos es como se muestra en el siguiente diagrama.. 4.
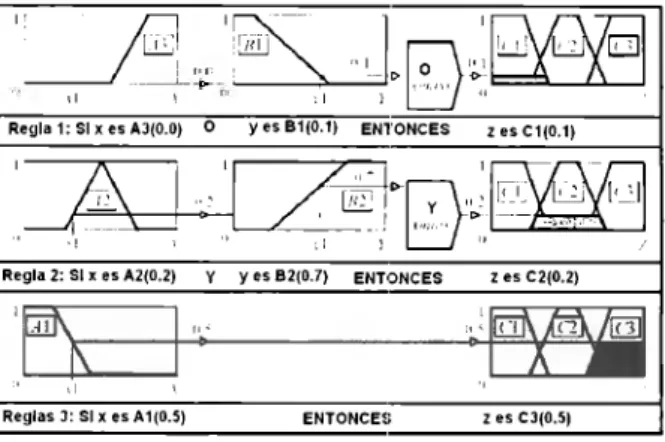
(14) ·1[D . '~DJa. " . D.~' '~ ~~-. 1 - ~ - - . , . _ _ ' _ '-~---[>. _ _ /___. ". 11. \. Regla 1: SI x es AJ(0.0). 11. :1. Y es B1(0.1). O. -~11,. ). ~ ~ - ~ - .......... .._ __ _.. 11. z es C1(0.1). ENl'ONCES. J'l--+-..d 'L~l>-@'IT¡,¡·[ ,·Y,-D¡,,¡ __ l~-1-l~=~~L __ -. 1. 1-/I;___='·=-·\. ,_lE::_·N2_' .•. ~ ' !. 11. -. ,¡. Regla 2: SI x es A2(0.2). y. ',. 1. y es B2(0.7). Reglas J: SI X es A1(0.5). JI. 111~·-. l. 11. /. z es C2(0.2). ENTONCES. ENTONCES. z es CJ(0.5). Figura 2.2.4 Evaluación de reglas. El siguiente paso es correlacionar la consecuencia de estas premisas con el antecedente. Existen dos métodos principalmente para realizar esta correlación y son llamados, clipping y scaling. El primer método consiste en simplemente truncar la función de salida (el consecuente) al valor de la entrada. Sin embargo es fácil ver que existe pérdida de información cuando sucede este truncamiento y que además en un sistema experto (es decir, que contiene reglas que imitan a un operador experto) el sistema pierde resolución y precisión. Existe otro método para poder establecer esta relación y es conocido como scaling, en el cual la función de salida es escalada solamente por el valor de la premisa o antecedente, así la forma de membresía no se pierde y se tiene más información que con el primer método. Este método consiste en multiplicar todos los elementos de la función de membresía de la consecuencia por el valor de la regla antecedente. Este método es preferido para sistemas expertos por preservar la forma de la función de membresía. Gráficamente los procesos son:. Grado de Pertenencia. Grado de. Penenencla. ,.o~ - -~ - ~- ~. '" 11::. 1.1::. o.oL--1iC,a"'"""'"""""""""""'"'""""'----'z Cllpplng. Figura 2.2.5 Clipping y scaling. Agregación de reglas Es el proceso de unificación de las salidas de todas las reglas para generar un solo conjunto difuso.. 6. 1. g_-----,1, ¡-ff7 CZia ,U __ "?~_J"' CD ::; ¿. 1. IJ. 1. /. (1. (l. lzes('l((1J1 l•lzesC2(112ll•lzesC3(Ú'i]. Figura 2.2.6 Agregación. 5. 11. •. 1. I,. 1.
(15) Como se puede observar en la figura 2.2.6, se formará un nuevo conjunto difuso gracias a las contribuciones de los resultados de la evaluación de cada una de las reglas. Desdifisuficación. El último proceso de la inferencia tipo Mamdani es llamado desdifusificación y consiste en encontrar el mejor valor para describir al conjunto difuso de salida, después de la agregación. Los métodos más usados para la desdifusificación son: ./ ./ ./ ./ ./. Centroide (Centro de Gravedad) Centro de Suma Centro de Área Mayor Media Difusa Media Difusa Ponderada. 2.3 Inferencia difusa Sugeno En la inferencia del sistema bajo un esquema tipo Mamdani es requerido encontrar en la desdifusificación un punto (centroide) integrando una superficie continua. Por lo general este proceso computacionalmente no es eficiente. El análisis que Sugeno propone involucra el uso de singletons difusos. Un singleton es un conjunto difuso con una función de membresía que existe en un punto particular del universo (X) y es cero en cualquier otro punto. Sigue el siguiente un formato: SI. xesA yesB ENTONCES z es f(x,y). y. donde x y y son las entradas al sistema, z es la salida y A,B son conjuntos difusos. La salida es representada por un singleton cuya altura es función de las variables de entrada. En muchos casos simples y de bajo orden, se utiliza un sistema Sugeno de orden cero, en que la función f(x,y) es igual a una constante k.. x es A yesB ENTONCES z es k SI. Y. Cuando se utilizan sistemas Sugeno de mayor orden se formula un polinomio característico para que la salida del mismo corresponda al valor que debe tomar la señal de control para ser aplicado a la planta. Al igual que el algoritmo de Mamdani, el Sugeno contiene un proceso de agregación y cálculo del mejor valor para representar la reacción del sistema a un cierto estímulo. Se evalúa cada regla y se obtiene un peso, el cual es aplicado al resultado de la evaluación del polinomio correspondiente a dicha regla. La señal de control resultante se calcula como el promedio de los polinomios ponderados por los distintos pesos.. 2.4 Comparativa Como en el Mamdani, en Sugeno la entrada está normalizada, lo que da flexibilidad en el tipo de funciones de membresía que se pueden usar. A diferencia del Mamdani, en el Sugeno la normalización se hace únicamente en el antecedente de las reglas [Driankov, 1996]. En el consecuente se trabaja con estados desnormalizados. Inclusive ya no es necesaria la desdifusificación pues el resultado de cada regla es ya un valor crisp.. 6.
(16) El método Sugeno al evaluar cada regla y obtener µu, gráficamente emplea una función de membresía singleton, que es más sencilla de implementar en sistemas microcontrolados.. Mamdani:. a) Permite implementar sistemas expertos b) Describe procesos de forma más cercana al razonamiento humano. c) Tiene muchos requisitos computacionales Sugeno. a) b) c) d). Mucho más eficiente computacionalmente Trabaja bien con sistema que requieren optimización y técnicas adaptativas Para sistemas dinámicos no-lineales Complicado para diseñar el polinomio característico. 2.5 Estabilidad. Estabilidad por plano de fase. Dado que los sistemas de control difuso se usan principalmente en sistemas no lineales y están basados en el conocimiento experto, la falta de técnicas formales de estudio de estabilidad de los sistemas difusos se ha considerado un área de oportunidad en investigación. Una forma de análisis de estabilidad en los sistemas difusos consiste en el enfoque del plano de fase. En él se estudia de forma gráfica la relación entre las reglas y el orden que son activadas o "disparadas" cuando el sistema se encuentra en funcionamiento [Driankov, 2000]. Este método es útil en el caso en que se tienen dos entradas posibles, pues con un número mayor es difícil realizar la interpretación gráfica de lo anterior.. Procedimiento para el análisis por plano de fase. Teniendo la base de reglas (matriz) es posible encontrar dos ejes (x1 y x2) correspondientes a las variables de entrada. Tomando en cuenta las funciones de membresía que definen a cada una de las variables, se divide ("particiona") el espacio definido por la matriz. El elemento perteneciente al par (x1 ,x2) del espacio pertenece al subespacio de la partición asociada con la regla j si se cumple que:. donde µR1(x,,x 2)y µR,(x"x 2) son las relaciones difusas que representan el significado de los antecedentes de las reglas j y k respectivamente. La trayectoria de un sistema de lazo cerrado se puede determinar con ayuda de la trayectoria lingüística, la cual está formada por una secuencia de reglas obtenida de acuerdo con el orden en que fueron ejecutadas.. 7.
(17) PG. p P16. PG P2l. P17 Pl8 Pl9. P22. P20. P25. PZ3 P24. Trayectoria lingülstica: P2. PS, P11, P12, P17. P1B P19, P14, P9, PB, P13. Figura 2.5.1 Trayectoria lingüística. La trayectoria es un vector de campo que se puede denominar como <l>(x1 ,x2). Por inspección se pueden determinar tres posibles casos que nos ayudan a interpretar la estabilidad del sistema: Sistema retroalimentado estable: El vector de campo definido por <l>(x1 ,x2)se aproxima al centro en la operación del sistema. En estos casos generalmente la planta tiene una influencia mayor sobre la salida.. HG. NG . / ~. t. _¿r:-/. PI. -=---t--a;a---------::,...-=-+is,,a---l---;s,:;,,....._::---+~-X1. -""""'--=-~_,_~,,,----h=,------,,.-c--+-=p2,,..s--. ~- - - - ~ - - - . . . . , _ - - ~ - - ~ - - Figura 2.5.2 Caso del sistema estable. Caso crítico: no se llega a <l>(x1 ,x2)=0, de modo que la inestabilidad puede ser evitada si la planta tiene más fuerza sobre la salida que el controlador. p,.-. /. PG /,,. -._ / \. :<. P4. pg. P5. P10. Figura 2.5.3 Caso critico. Ciclo límite: Es una combinación de los casos estables y críticos. NG. "1/. }>-. $ ¿___. P1 P2. P4 P5. Figura 2. 5.4 Ciclo límite. 8. \.
(18) Vectores de campo no lineales con áreas aisladas: las áreas aisladas tienen curvas que convergen a un punto distinto al deseado. NG. ~. !. P1 P2 P3 P4. P5. Figura 2. 5. 5 Regiones aislad8s.
(19) 3 Diseño del sistema 3.1 Diseño del prototipo de cámara de cría. o.. I" tQ. 5.5 m. 17cm. 16cm. 10cm. o. 7. 1. - - - - - - - - - -------<. 7. 'l ,. 5=. 90cm Figura 3. 1. 1 Esquema del prototipo. Las medidas del prototipo se hicieron sobre la base de las placas comerciales de acrílico con el fin de utilizar el menor número posible y disminuir costos. El prototipo a escala cumple con los requerimientos especificados por el lng. Agrónomo Erandi Valdovinos Romero, experto en producción animal. Sensor de humedad Ilwninación. r-----------------------------------, Ventilador ·--------------. o .-------------: Hwnidificador .· ·--------------~. --------------------Sensores de temperatura interiores. • 1. Sensor de luz. Figura 3.1.2. Esquema con sensores y actuadores. 10. •. ---------. 1. Calefactor. :.
(20) 3.2 Diseño del controlador difuso PI de primer orden El control elegido fue uno de tipo PI, tomando en cuenta que se requiere de una corrección de tipo proporcional para aproximarse al valor objetivo y que la corrección integral contribuye a reducir el error de estado estable. No fue implementado un control PID pues al tener tres entradas (error, integral del error y diferencia del error) se complicaría el proceso de obtención de reglas y análisis de estabilidad. La estructura del controlador PI de tipo Sugeno de primer orden es:. m. ¿µU¡ •u,* i=l u= ----. Figura 3.2.1. Diagrama a bloques del controlador. Inicialmente se planteó trabajar con un controlador de tipo Sugeno de 25 reglas, similar al programado en Simulink de Matlab 1; sin embargo, al analizar la operación del mismo fue evidente que muchas de las reglas en algunos extremos no eran utilizadas y al tomar en cuenta la complejidad de programación de 25 diferentes bloques de evaluación de polinomio, se decidió limitarlo a 9.. 1. Ver anexo de Simulación del sistema de control con MATLAB y Simulink. 11.
(21) De esta forma el control no pierde funcionalidad, pues se sigue contando con tres tipos de error para cada caso (error positivo grande, error cero y error negativo grande, tanto para el error integral como para el error proporcional). Para el diseño del control se realizó un programa en lenguaje ensamblador del microcontrolador 8052. Tal programa cuenta con módulos que corresponden a cada uno de los bloques señalados en la figura anterior2. El tiempo entre cada una de las muestras de la temperatura se fijó en T=1 segundo, esto facilita el cálculo del error integral (eint), recordando que dicho error está dado por:. eint(t). = e int(t -1) + T * e(t -1). donde e es el error proporcional.. 3.2.1 Definición de funciones de membresía. Como se mencionó llneas arriba, el programa está diseñado para 9 reglas, de modo que se cuenta con tres funciones de membresía para el error y tres para el error integral. Tomando en cuenta que el sensor entrega cambios de 10mV por cada grado centígrado, se hace evidente que los cambios en la medición (y por lo tanto en el valor de salida del A/D) tendrán valores definidos. Lo anterior se comprobó por medio de pruebas al circuito de medición de temperatura en las que se observó que no hay valores intermedios entre cada grado centígrado. Gracias a estos valores definidos de medición de temperatura con un error de ±0.5 ºC, se necesitan unos cuantos valores para las funciones de membresía. Aprovechando esto se eligieron las formas trapezoidal y triangular para dichas funciones. Se definió un error negativo máximo de -BºC y un error positivo máximo de 6ºC. Las funciones son:. &ror negativo. f: ¡---~ -1 -~ º /l. o. , ,. -8 -7 -6 -5 -4 -3 -2 -1 &ror [°C]. O. Figura 3.2.1.1 Función de membresía del error negativo. 2. Ver sección 3.4 Diagramas de Flujo del Controlador. 12.
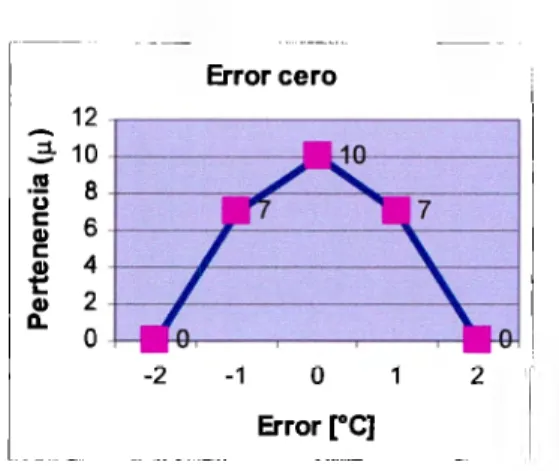
(22) Error cero -.. ~ 10 + - - - - - ---~ f---------t 8 +--- -...__,,..---'.._,__-,-------l. .!!! u. ¡e l. 4 -. ~. 2 +--.,-- - - - - ---- ~. 6 + - - --1=- - - - - =~ - - ~. ~. 0 -H~. -2. t 1 , - - - - - - , - - - - - , - --,-1~. o. -1. ~. 2. Error rCJ Figura 3. 2. 1. 2 Función de membresfa del error cero. Error positivo 12 , - - - - - - - - - - - - - - ,. ~10 .!!! u 8. +-- - - ---~ --Mal-Ma-4 + - - - - -- -------<. e 6 -t------:1~ - - - - - - - 1 4 -J----F4-- - - - - - - - - - i 2 +-- ~ - - - - - - - - - - - 1. :!!. l. l. o +tl9--\f- - - . - - , - - - , - - , - - . - - I O. 2. 3. Error. 4. 5. 6. rCJ. Figura 3.2.1.3 Función de membresfa del error positivo. En la figura 3.2.1.3 el extremo izquierdo no presenta una línea con pendiente constante, esto se debe a que se consideró que el error 2 debe tener una pertenencia relativamente baja dentro de este conjunto (error positivo), y por ello le fue asignada la pertenencia 6. Como se puede observar en las tres figuras anteriores, las funciones de los extremos son de forma trapezoidal sesgada. Si los errores exceden los valores límite (-8 y +6) el programa les asigna automáticamente una pertenencia de 1O y limita el error a -8 o +6. Esto lo hace con fines de cálculo 3 del polinomio, pues si se excediera afectaría el resultado del mismo . En cuanto al error integral, dentro de la estructura del programa se define una escala centrada en 128 (valor decimal), equivalente al O. Esto permite que se pueda tener un error máximo de 255 (error integral positivo) o de O (error integral negativo). La elección de esta escala simplifica el cálculo del error integral al no usar un bit de signo. El manejo del signo se hace evaluando si el error está antes o después de 128. Error integral (escala). 1. +. ..... ...... 1. e. 128 (0). 255. Figura 3.3.1.4. Escala del error integral 3. Esto se analiza más adelante en 3.3.2 Definición de Reglas. 13.
(23) En el error integral también se tiene una limitación de 25 y 225, de modo que no ocurra un desborde del espacio de 8 bits destinado a guardar tal error. Las funciones de membresía son también trapezoidales y triangulares y se muestran a continuación:. Error integral negativo - :1. 12. 10. ca e CD e. 8. ·e:;. 6 4. ~. 2. CD. o. D.. o. o. o. N. o. o. o. o. o. o. o. <'l'<tLO<Ot--COO>. o. Error integral. Figura 3.2. 1.5. Función de membresía del error integral negativo. Error integral (Cero). -12 ,--- - - - - - - - - - - - -. 210 - ¡ - - - -J!lllj.~- - -7 ca 8 + - - - - -.Jl"----"'..__ _ _ _-1. ·¡:; e 6 + - - -----..1ac- - - -~ 1.-- --1 GI. e. ~. 4 - t - --;aill'=--- - - - - -....:111111,,;-- -1 2 +-c..."--- - - - - - - ---"'....r l. ~o -~~~~~~~~~~~~q¡<o "~<o ""'1, ""Q¡ ~ ~":, "~ "~ "~ Error inte ral. Figura 3.2.1.6. Función de membresía del error integral cero. Error integral positivo. í:~. ~. ' '"''"'"""'"'""'""'"''"''"'''''"'''"""J rfi" ,c-n;, ~ ~ro ~<o. "<on;, "ro<o ~'\ "<oq¡. Error integral. Figura 3.2. 1. 7. Función de membresía del error integral cero. 14.
(24) 3.2.2 Definición de Reglas Las reglas se establecen para cada uno de los casos del error combinados con el error integral, 4 resultando en 9 proposiciones del tipo IF THEN, las cuales se enuncian a continuación : 1. 2. 3. 4. 5. 6. 7. 8. 9.. Si Si Si Si Si Si Si Si Si. E es negativo y EINT es negativo, entonces enfría. E es negativo y EINT es cero, entonces enfria. E es negativo y EINT es positivo, entonces enfría. E es cero y EINT es negativo, entonces calienta muy poco. E es cero y EINT es cero, entonces calienta poco más. E es cero y EINT es positivo, entonces calienta poco. E es positivo y EINT es negativo, entonces calienta bastante. E es positivo y EINT es cero, entonces calienta más. E es positivo y EINT es positivo, entonces calienta mucho.. Las reglas pueden ordenarse en un cuadro como el siguiente donde Pn simboliza el polinomio correspondiente a cada regla n:. Tabla 3.2.2.1 Asignación de polinomio. a pares de funciones de membresía. 3.2.3 Cálculo de Parámetros del Polinomio 5. Para la obtención de cada polinomio se realizó un mapeo en una hoja de cálculo EXCEL de cada uno de los errores contra los posibles valores de error integral. El mapeo incluyó los valores de pertenencia del error y el error integral en cada una de sus respectivas funciones. Después se siguió el proceso de evaluación para un controlador Sugeno, realizando la evaluación de pertenencia por medio de la inferencia min. El mapeo incluye la evaluación de cada uno de los polinomios, siendo posible el proporcionar para cada polinomio los valores de p,q y r. Finalmente se realiza el promedio ponderado de las pertenencias con los resultados del polinomio. Los datos de la hoja de cálculo permiten al usuario ver los resultados para cada combinación posible, lo que facilita la sintonización de p,q y r. Recordando las expresiones lingüísticas de las reglas enunciadas anteriormente, se estableció que a la acción enfriar corresponde a un O del valor de salida, mientras que calentar mucho equivale a un 7 del valor de salida. Esto define 8 posibles valores de duración del pulso de salida que enciende al conjunto motor-resistencia calefactora, siendo 7 el mayor pulso y Oel menor pulso.. ' El consecuente está expresado de forma lingüística, más adelante se presenta el polinomio correspondiente. s Las tablas se incluyen en los anexos. 15.
(25) Los polinomios resultantes del proceso de sintonización son:. Pi= Oe+ O.Ole; 111 + O. P2 = Oe + Oe;m + 1 P3. = Oe + Oe¡ 111 + 1. P4 =le+O.Ole;ni +1. Ps = le+ Oe;. 111. +1. P6 =le+O.Ole; 111 -1 P7 = 0.7e+ Oeint + 2. Pg = le+ Oeint + 1 ~. =Üe+O.Ole¡ 111 -1. La rutina establece un tiempo de espera (dado por el TIMER O) antes de enviar el pulso que prende el conjunto motor-resistencia calefactora. Al tener 8 posibles valores de duración de pulso, se tiene un valor de espera para cada uno de ellos. Por ejemplo, si el control da como resultado un 5, significa que el tiempo de espera será de un valor de 3 ms mientras que la duración del tiempo de encendido del triac será de 5ms. Para encender el triac se le aplica un pulso de 0.5 ms.. 16.
(26) 3.2.4 Diagramas de Flujo del Controlador. El microcontrolador utilizado en el proyecto es el 80!52 de ATMEL. Entre las ventajas de la elección de este dispositivo se encuentran su bajo costo y sencillo lenguaje ensamblador. Sin embargo, no cuenta con funciones para manejo de lógica difusa o gran capacidad en memoria RAM. Dado que el controlador es de tipo Sugeno, la falta de funciones para el manejo de sistemas difusos en el 8052 fue enfrentada con bloques de código y rutinas que realizan cada etapa del control (evaluación de las funciones de membresía, inferencia, evaluación del polinomio y ponderación de la salida). Los diagramas se muestran a continuación:. 17.
(27) Diagramas de flujo de rutinas programadas en el 8051: CONTROL DIFUSO PI Lectura y limitación de valor:. Valor =Leer A/D. Error = Obtener distancia al error O (localizado en una referencia (214 para 34 ºC y 181 para 29ºC). Error int= Eint ant +Error ant. Eint ant inicial=128, equivalente al cero. ¿El error int se acerca a O o 255? ¿El error excede -8 o +6? (extremos de la escala). Sí. Limitar a O o 255 el error int, limitar a +6 y -8 el error. No. 18.
(28) Evaluación de las Funciones de Membresía (FM): MFEVAL Inicio La evaluación se hace para funciones de membresía del error y error integral. Selector de FM. No. Sí. Obtener distancia con respecto a A. Cargar valor de distancia a ACC. Obtener µn: Leer ROM DPTR=A. Sí. No FIN: Continuar. enMIN. 19. µn=O.
(29) Obtener el mínimo entre las parejas deµ correspondientes al error y error integral: MIN. INICIO. µan=µ del error µbn= µ del error integral µ= {O, 10} 10 es el equivalente a µ=1 n= número de reglas con POLI. Evaluación del polinomio: POLI. INICIO. De acuerdo con los valores deseados de p,q y restablecer un bloque para cada polinomio. Repetir n veces. 20.
(30) Obtención del valor de la señal de corrección: (bloque 'calculus?. INICIO. n. Con base en RES se lee en ROM el valor correspondiente al TIMER O, que gobierna el pulso de disparo que enciende al conjunto motorresistencia. El valor se cargará en TH 1 Y TL 1 durante la int. de cruce por cero 1,. FIN : REPETIR EN EL SIGUIENTE CICLO DESPUÉS DE COMPLETAR 1 S. 21.
(31) 3.3 Simulación del sistema de control en MATLAB. Una de las ventajas del control difuso es la posibilidad de disenar una ley de control sin contar con un modelo matemático de la planta. Sin embargo, requiere del conocimiento experto acerca de la misma para poder formular un control útil. Por ello durante el primer periodo de trabajo fue estudiado el comportamiento de la temperatura en la base del prototipo de incubadora/nacedora como respuesta a distintos ángulos de disparo del conjunto motor-resistencia. Es importante senalar que: 1.. Estas curvas no describen completamente la planta que controlamos finalmente, pues las pruebas se realizaron antes de contar con todos los sensores y actuadores.. 2.. Las pruebas se hicieron con el objetivo de conocer cómo obtener un modelo de la planta. Esto resultó útil para el desarrollo de la simulación en el programa MATLAB.. Diseño de controlador en Matlab. Como parte del estudio de la lógica difusa, se realizó con ayuda del Doctor Marco Paz, un algoritmo de control en Matlab y Simulink de un controlador PI Sugeno de primer orden, para una planta cualquiera. Esto permitió el aprendizaje acerca de la estructura del controlador y la formulación de reglas en conjunción con la evaluación del polinomio. Se eligió un control de tipo PI al considerar que la temperatura no tendrá un carácter oscilatorio en el sistema, además de que el control integral ayudará a reducir el error de estado estable. No fue implementado un control PID pues al tener tres entradas (error, integral del error y diferencia del error) se complicarla el proceso de obtención de reglas y análisis de estabilidad. La estructura del controlador PI de tipo Sugeno de primer orden es: Evaluación del 1>olnomio de Sugeno: u*. Entradas al controlador. enor e i1degrnl del error. Funciones de meni>resía del error. J,. compos1c1on con. operador min : v. m. 1. •u; LA,. ~A, u=~--m i=I. Funciones de membresía de la hdegral de enor. señal de corrección. Figura 3.3.1 Diagrama a bloques del controlador. Se realizó un control PI Sugeno de primer orden en Simulink con el fin de entender las etapas en el nuestro. Para observar el funcionamiento del controlador se utilizó una función de transferencia que no corresponde a la planta definitiva, pues todavla no se contaba con las curvas del comportamiento de la misma. El diagrama a bloques del control PI se muestra a continuación:. 22.
(32) Serial de corrvcclón. Gráfica del Error. 0.5. ~ Valor de Referencia. Planta. Controlador difuso de tipo Sugeno, orden 1. Figura 3.3.2. Diagrama a bloques del sistema en simulink (planta lineal). El diagrama de controlador difuso de tipo Sugeno, orden 1 se muestra en la figura 3.3.3:. -. ~. ~. -t3} E. ~. -Q]'. ~ -[9'. a;t-. B.;t-. ~-. ~. --. -- LJ=_. eol X. •L-. • 1---,. ~. •L...J =i. t:. ~ 1. ~. ,;;;;;;. ~ -f.]Ya- ~. -. .. 1. :§r. Íi ~. -. --. -r;;i. =;:~-. ;:!.;!:". -~-. -Q. -·. -. ~ _, r rr-L. ~. -· -~n ~. ~-. .. .... ...... -·. .... ..-· .-·. F.J;t-i"""" ~. •J---,. t---. ::h-: ~·. •Pal--------,. ,----. ~~. ..':..lfr. ~~-. --.. .... -1-..,_ _J . . . .. ""'. ~. 1-+ 1-+. .. ·-•u. ·-. -. :::-. -. Q ~. -. J%. --.. --· .. . --.. -,, ~g ~-L.:.J. -. -;:!.:a!:. 1,. ~. -L.:.J ~. .. Figura 3.3.3. Controlador PI difuso Sugeno, orden 1. 23. 11. . -.. ,_. -.
(33) Como se puede observar en la figura anterior, se tienen 5 funciones de membresía para el error y 5 para la integral del error. La siguiente etapa es realizar combinaciones de los dos grupos, resultando en 25, el cual es el número de reglas del controlador. Se evalúa la pertenencia de un valor para cada parte del antecedente de las reglas que tienen la siguiente forma: Si el error (e) es A y la integral del error (e;nJ es B, entonces u=P e+Q e;n1+r. donde res un offset y A y B son las funciones de membresía. La segunda etapa es la de evaluar el polinomio de Sugeno para cada una de las reglas. Esta etapa corresponde al bloque cuyas entradas son el error y la integral del error y con 25 salidas. La estructura interna se muestra a continuación:. •• 11. u. l:--:+-" T. -. - , f - "" 1. 1. ~T 11. ,¡,, 1. .. """". TY_. 1 1. IT. -. n. ""'. ~. w. ..... Figura 3.3.4. Bloque de waluación de polinomio. Son 25 polinomios como ya se mencionó, donde la parte superior corresponde a la parte P y la inferior a Q. Finalmente se le agrega el offset r. La última etapa consiste en realizar el promedio ponderado de las funciones de pertenencia con sus respectivos polinomios. Se multiplica cada regla por la pertenencia que le corresponde sumando después los resultados y dividiéndolos finalmente entre la suma de los valores de pertenencia. La salida del controlador es la siguiente:. 24.
(34) 25. z =. I. µ"u,,. _11_=~1_ __. 25. I. ,u,,. i=I. La respuesta de la planta sin controlador, para una referencia de 34 es la siguiente:. B,------1.~I ~~ 1-1---.EI. Const.ant. Transfe1 Fcn. Scope. Figura 3.3.5. Planta sin controlador. ····· ··· ·· =··· ··· ···-'.·· ······ ·. 8 6. :¡ ºo. 2. 4. 6. .8. 10. Tme olf~et Figura 3. 3. 6. Respuesta de la planta sin controlador, eje x es tiempo [s] y eje y es la salida. Para modificar esta respuesta se elaboraron 25 reglas con el control Sugeno de primer orden. La respuesta obtenida es la siguiente. Time offset: O Figura 3.3. 7. Respuesta de la planta con controlador, eje x es tiempo [s] y eje y es la salida. Las reglas se formularon de acuerdo a lo que se desea implementar en el control de temperatura. Se decidió que si el error es grande, se requiere una corrección de una mayor magnitud en la parte proporcional del polinomio. Por otra parte, el error integral proporciona información acerca del comportamiento anterior y la tendencia del mismo, de modo que la constante que lo multiplique en el. 25.
(35) polinomio deseado.. ayuda a "moderar" la corrección, es decir, aumentarla o disminuirla de acuerdo a lo. Los valores de las constantes p, q y r para los polinomios de las reglas se encuentran al final de este documento. Obtención del modelo difuso para la simulación. Después de construir el circuito para PWM se hicieron pruebas con el motor-resistencia para observar como cambia la temperatura. La recolección de datos se hizo por medio de toma de muestras con intervalos de 2 segundos entre cada una:. Angulo 1 2 3 4 5 6 7. Valor í rad rr/8.33 2*rr/8.33 3*rr/8.33 4*rr/8.33 5*rr/8.33 6*rr/8.33 ?*rr/8.33. l. Valor aproximado [rad] .38 .75 1.13 1.5 1.89 2.26 2.63. Tabla 3.3.1 Ángulos usados en las pruebas. 1. Con base en la observación de las curvas es posible constatar un comportamiento de crecimiento exponencial, además que no existen sobre impulsos en las curvas. Tomando en cuenta lo anterior se decidió utilizar un sistema de primer orden para las funciones de transferencia que constituyen el modelo difuso. La forma de una función de transferencia de primer orden es:. K * e-Ls. H(S)= ~----~ ~+ 1. Donde óy = Valor. óu. = Angulo. de estado estable de disparo. L = Retardo. El procedimiento para obtener las funciones de transferencia es el siguiente: 1. 2. 3.. 1. -Se obtiene el valor de estado estable (valor en el cual la temperatura no cambia) y el retardo. -Se obtiene la constante de tiempo que equivale a r = .63 * ~y . -Se obtiene K dividiendo el valor de estado estable entre el valor del ángulo de prueba.. Ver al final del documento. 26.
(36) Las funciones de transferencia obtenidas en Simulink se muestran a continuación.. Figura 3.3.8 Modelo difuso para el caso de la temperatura. En la figura 3.3.8 se puede observar que las funciones de transferencia están antecedidas por una función de membresía. Ésta permite estimar la respuesta a un ángulo de disparo distinto al utilizado en las pruebas. Lo anterior proporciona una aproximación del comportamiento de la temperatura. El siguiente gráfico de MATLAB muestra los distintos ángulos de disparo utilizados, los desfases y los valores de estado estable, con los cuales se observa la no-linealidad de sistema. En un sistema lineal las constantes de tiempo serían iguales y el desfase sería el mismo.. Temperatura (ºC). Tiempo (s) Angulo de Disparo. Figura 3.3.9. Cu,vas de temperatura. 27.
(37) Simulación en Simulink. Para el control de temperatura de la planta se sustituyó la función de transferencia. o.s. por la. s' +3s + 2. hallada con las pruebas. Los valores que el controlador debe entregar como señal de corrección deben estar en un rango de O hasta 2.7, para poder tener a la salida una curva como la obtenida experimentalmente. Dado que el comportamiento de la planta es no lineal el proceso de sintonización es más complicado que en el caso de la planta lineal. La sintonización se realizó tomando en cuenta que los valores de los errores debían ser transformados a cifras muy pequeñas. En el caso del error integral se debía tener constantes que lo hicieran manejable y le permitieran al polinomio presentar un resultado que coincidiera con el valor del ángulo de disparo. Los gráficos de la respuesta obtenida se muestran a continuación:. "'. " ". ,, " Figura 3.3.10 Respuesta. La referencia de 34 º es alcanzada, aunque al principio se tiene un cambio en la señal de corrección cuando el error integral crece considerablemente. La señal de corrección varía de la siguiente forma:. ••. .,. ., Figura 3. 3. 11 Señal de corrección. 2B.
(38) Como se tiene que la señal de corrección en la primera parte de la respuesta sobrepasa el valor máximo de ángulo de disparo se colocó un bloque de saturación que adecua la salida a los valores máximo (2.81) y mínimo (O) aceptables para el modelo.. Formulación de Reglas para el control de la planta lineal. ERROR-> INT ERROR 1 V. INT E«0, LA TENDENCIA DE LOS ERRORES HA SIDO NEGATIVA, VIENEN DE TOO HOT, M=-3, S=2 INT E<0 LA TEND, HA SIDO NEGATIVA, VIENEN DE HOT M=-1.5 S=1 INT E=0, VIENEN DE ARRIBA O ABAJO, M=0 S=1 INT E>0, LA TEND HA SIDO POSITIVA, VIENEN DE COLO M=1.5 S=1 INT E»0, LA TEND HA SIDO MUY POSITIVA, VIENEN DE TOO COLO M=3 S=2. E«0, está muy por arriba TOO HOT, HAY QUE ENFRIAR MUCHO M=-6.5 S=2.5. E<0, está arriba, HOT, HAY QUE ENFRIAR M=-3 S=2.5. P=20 0=20 R=0.01. P=20 0=10 R=0.01. P=20 Q=0 R=0.01. E=0 DESEADO M=0 S=1. E>0, está abajo COLD,HAY QUE CALENTAR M= 3 S=2.5. E»0,está muy por abajo, TOO COLO, HAY QUE CALENTAR MUCHO M= 6.5 S=2.5. P=15 0=10 R=0.01. P=0 Q=5 R=0.01. P=15 0=10 R=0.01. P=20 0=20 R=0.01. P=15 Q=5 R=0.01. P=0 Q=2.5 R=0.01. P=15 Q=5 R=0.01. P=20 0=10 R=0.01. P=15 Q=0 R=0.01. 1. ~=g -. -. P=15 Q=0 R=0.01. P=20 Q=0 R=0.01 ... ·--. P=20 0=10 R=0.01. P=15 0=5 R=0.01. P=0 Q=2.5 H=0.01. P=15 Q=5 R=0.01. P=20 0=10 R=0.01. P=20 0=20 R=0.01. P=15 0=10 R=0.01. P=0 0=5 R=0.01. P=15 0=10 R=0.01. P=20 0=20 R=0.01. 29.
(39) Formulación de Reglas para el control del modelo de la planta. ERROR-> INT ERROR 1 V. INT E«0, LA TENDENCIA DE LOS ERRORES HA SIDO NEGATIVA, VIENEN DE TOO HOT, M=-4 S=S INT E<0 y positivo pequeño LA TEND, HA SIDO NEGATIVA, VIENEN DE HOT M=0 S=6 INT E=0 y positivo, VIENEN DE ARRIBA O ABAJO, M=10 S=S INT E>0, LA TEND HA SIDO POSITIVA, VIENEN DE COLO M=25 S=10 INT E»0, LA TEND HA SIDO MUY POSITIVA, VIENEN DE TOO COLO M=60 S=60. E«0, está muy por arriba TOO HOT, HAY QUE ENFRIAR MUCHO M=-4 S=2.29. E<0, está arriba, HOT, HAY QUE ENFRIAR M=-3 S=1.5. P=-0.6 Q=-0.002 R=1.2. P=-0.6 Q=-0.005 R=1.2. P=-0.6 Q=O R=1.2. E==0 DESEADO M=0 S=1. E>0, está abajo COLO, HAY QUE CALENTAR M=4.5 S=2.5. E»0,está muy por abajo, TOO COLO, HAY QUE CALENTAR MUCHO M= 9 S=3. P=-0.5 Q=-0.0075 R=-0.5. P=-0.9 Q=0.000001 R=2. P=0.2 Q=0.0001 R=0.2. P=0.01 Q=-0.001 R=0.01. P=-0.5 Q=0.0008 R=-0.5. P=--0.9 Q=0.000001 R=1. P=0.2 Q=0.00001 R=0.2. P=0.01 Q=-0.01 R=0.01. P=-0.5 Q=0.03 R=0.5. P=-0.9 Q=0 R=0.5. P=0.2 Q=0.0001 R=0.2. P=0.01 Q=-0.5 R=0.01. P=-0.6 Q=0.005 R=1.2. P=-0.5 Q=0.04 R=-0.5. P=-0.9 Q=-0.0000006 R=2. P=0.2 Q=0.0003 R=0.2. P=0.01 Q=0.02 R=0.01. P=-0.6 Q=-0.006 R=1.2. P=-0.5 Q=0.005 R=-0.3. P=-0.9 Q=0.0000007 R==2.7. P=0.2 Q=0.000001 R=3.4. P=0.01 Q=0.0001 R=0.01. 30.
(40) Curvas de temperatura para obtención de modelo en Simulink. Temperatura [ºC] 39. 37. •. +---------- ----------- -----. •. *. <> Angulo 4. + - - - - - - - - - - - - - - - - ----!! ~. 33 j. ,,tr. Angulo 6 Angulo 5. :t: 35. Angulo 7. ~. Angulo 3. •. Angulo 2. +. Angulo 1. -. R::>lin6nica (Ángulo 4). -. R::>lin6nica (Angulo 2). - - R::>lin6nica (Ángulo 6). 31. 111111. 1. _ ___________ __________, -. R::>lin6nica (Ángulo 6). -. R::>lin6nica (Ángulo 5). - - R::>lin6nica (Ángulo 6) 29. 1. -. R::>lin6nica (Ángulo 6). ~ ... -. ¡-. ~. 27. 1. •. R::>lin6nica (Ángulo 6). R::>lin6nica (Ángulo 6) -. • --- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 1 -R::>lin6nica(Angulo7) - - R::>lin6nica (Ang ulo 5). 25. 23. --- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ,. - - R::>lin6nica (Ángulo 3) -. R::>lin6nica (Ángulo 2). -. R::>lin6nica (Ángulo 2). -. R::>lin6nica (Ángulo 1). O 10 20 30 40 50 60 70 80 90 10 1112 13 14 1516 17 18 19 2021 22 23 2425 26 27 2829 30 31 32 33 34 35 36 37 38 39 -R::>lin6nica (Ángulo 3). Tiempo [s].
(41) 3.4 Diseño electrónico del sistema. 3.4. 1 Diagrama a bloques del sistema Considerando un sistema generalizado, el proyecto cuenta con 3 bloques fundamentales:. Adquisición de datos. •. Procesamiento Digital de Señales. •. Etapa de potencia. Figura 3.4.1.1 Diagrama a bloques. 3.4.2 Adquisición de datos. En este primer bloque están contenidos todos los recursos necesarios para extraer la información necesaria del estado preciso en el cual se encuentra la cámara de cría. Esto es, la temperatura, la humedad y la luminosidad. Este subsistema se muestra a continuación:. Sensores. ;. 1. Circuitos de acondicionamiento. Figura 3.4.2.1 Adquisición de datos. a). Sensores. •. •. Para la variable humedad se contará con un transductor con base en semiconductores, el sensor Sensor HoneyWell HIH-3602-L, que cuenta con las características suficientes para entregar información precisa sobre la humedad en el sistema.. 32.
(42) Q •. Para la medición de la temperatura se utilizará un sensor LM35DH, que cuenta con las características apropiadas de costo y precisión para nuestro sistema, así como de disponibilidad. Para la obtención de información sobre la luminosidad dentro del sistema se usará una topología básica basada en fotorresistencia (LDR). La única utilidad de este subsistema es poder calibrar los focos para lograr la intensidad luminosa requerida en cada una de las 2 posibles fases. El circuito se diseñó y empleó para la calibración, mas no se encuentra físicamente en la cámara de cría.. •. El diagrama de la etapa de adquisición de datos, construido en baquelita perforada, se encuentra a continuación. Para más información sobre características de sensores y el diseño del circuito véase Anexos - Características de sensores y actuadores.. +5V. Lm35. Sensor de lemperatura. 1-~i. +15V. 17. 200. 40k UI , . , ~ 3··,>·-~)+ ,,~- 5Salida 1OmV/"C + - - - - 1 - - - - - - - - ~ ' , / '1 ". 6,8k. :S-_... .<,;.·. ··1. l-,-. .. . .. 200. r-'V\1\. 2. 3.33k ~ 1k. ~---.--~~;. 10k. ·-...... 4 2 - ----V-. V---< · ./j -~- U2 4. L,\t~-, ,, ··-···;,1<.-·! 2. V-. ...-<. 1. 11. -15V. +5V. HIH-3602-. Ok. O. +15V. 1. 40k U4 ?7 ·, _. _ _ _ _s_aI_1d_a_35_a_1_5_8_ _~ v , , 1 1 , ~ + V+·--.:.._ R4 :;;'. 2.21M ~. _j ,-- ~. ,--''.fV\. R5. f. 1 34k 100k. +1.3V+---~. l. 10k 1. Ok. '',/'./'~. >-16-\',,\. •J-...-<. - ...-, 1 u-6 4. 1k. 2. '--- -. 53 ">·-.._J7 ,--~ ·L. v v~~ 1k. V•'-<_. ~----·'VV\40k. · D2. l la. _,. ___ _.. :,_.-------;1 ~- -. 40k. Salida 0.8 - 5V. <.. _. t:/ ':'l'·~-5. 10k. ...:~vV\. \!\I\. + 1 5V /-- f. /..___6....__. 3. O. r. \V,. 1Ok 'Z........._-___§___,1'1' '· ~ ~., 1. , •. 10k ~'\/',/1, V-_.,.--<_-- 1 .>. >··1 ~--. D3. -.........._4r-0 ..'.:_1_5_V j / 1 Salida O2 - 5V - V-~. ,/--.c5__,.__ _ _ _---Q. 5 D--'.)'·1/''----7. 51 Ok. lo. -15V Sensor de humedad. Figura 3.4.2.2 Adquisición de datos de sensores de temperatura y humedad. 4. EJ=G:¡. 1uF. 3. 2. 4800uF 1. 1. ....L.. TT. ....L.. J.... XFMR/CT-SEC 4800uF 1uF. LM7815C OUT 2. +15V. 1uF. l[',J. 100nF. (31\1[1. T. ~ GND. OUT 2 3 IN LM7915C. I. 100nF. o. o. -15V. Figura 3.4.2.3. Fuente de alimentación para adquisición de datos. 33. LM7805C 1 11\J OUT (3[\J[I. i. o. 2-o. +5V.
(43) b). Circuitos de acondicionamiento. El objetivo de esta etapa es lograr una salida en voltaje apropiada para la fácil manipulación y medición del valor real del transductor. Consta del uso de amplificadores de instrumentación INA101 de la firma Burr-Brown (Texas lnstruments). Para más información sobre este integrado consultar el anexo Características de sensores y actuadores.. El circuito diseñado entrega la siguiente respuesta:. •. Salida del LM35DH una escala completa de 0.8 a 5V para el rango de temperatura de +2ºC a 40°C.. •. Salida del HIH-3602-L una escala completa de 0.4 a 5V para un rango de 0% a 100% de humedad relativa.. El circuito construido para este fin se muestra a continuación.. ,,,.o·. ,,~ ···'::. :. -nJ~t[: (,311Se~~ 1 , G.:ir!.~. 1 [~. :-i-"t.:..d,. ~. ~,.:..q [:. '). ·:~. •: •n:iJt ., G,1r5-e.,,-,;: •:.. C,;:ar.se::. ~. .:.::cui,,.r.. ~ .:..·c~1p,.1.. Figura 3.4.2.4 Diagrama de pines del 1NA101. Figura 3.4.2.5 Circuitos de amplificación de señal. 34.
(44) 3.4.3 Procesamiento digital de señales. Esta etapa contiene el controlador difuso del sistema implementado en un microcontrolador Atmel AT89C8052.. El diagrama de flujo que sigue esta etapa es el siguiente:. Conversión Analógica-Digital de 8 bits. •. Procesado del valor binario mediante el algoritmo de control. •. Obtención del valor crisp de salida del controlador. •. Acondicionamiento del valor de salida para la secuencia de disparo. + Generación de disparo y salida a pines del microcontrolador. Figura 3.4.3.1 Procesamiento de señales. 35.
(45) El algoritmo de control se muestra en el siguiente diagrama de flujo:. 1. Selección de Fase (1 ó 2) Manejada por interrupción Temperatura 34y 29ºC. 2. Leer Humedad Actual Muestreo de 1 seg. Comparar con referencia Modificar el valor de salida. 3. Leer Temperatura Actual Guar.dar el valor anterior y error integral anterior Muestreo de 1 seg.. 4. Realizar Control Difuso Evaluación del Polinomio Determinación de Pertenencia Valor ponderado de salida Traducción del valor de salida a constante a cargar en el timer para disparo 5. Interrupción de secuencia de disparo. Detectar cruce por cero Manda ángulo de disparo dependiendo del timer del control difuso. 6. Información en memoria Funciones de membresía de error y el error integral Constantes a cargar en el timer. ~16.
(46) 3.4.4 Etapa de potencia. La implementación de la etapa de potencia se puede visualizar en el siguiente diagrama:. Acondicionamiento de señales del microcontrolador. + Aislamiento óptico con opto-acoplador. •. Circuito de potencia para actuadores mediante tiristor. •. Sincronización de la línea con secuencia de disparo en el circuito de potencia ;. + Esquema de conexiones para actuador de temperatura, humedad y luz. Figura 3.4.4. 1 Etapa de potencia. El acondicionamiento de señales provenientes del microcontrolador fue implementada con amplificadores operaciones mediante una topología basada en buffers. Esto con el fin de lograr la mínima atenuación del valor de salida del microcontrolador a la entrada del circuito de potencia. Además de llevar un circuito de acondicionamiento de señal, el sistema cuenta con un aislamiento óptico para proteger el sistema de procesamiento digital del circuito de potencia que maneja alrededor de 1800W. El circuito de acondicionamiento, aislamiento óptico y potencia mediante tiristores y amplificadores se encuentra en la siguiente figura, junto con los actuadores y sus correspondientes conexiones. Para el caso de la temperatura el actuador utilizado es un conjunto motor-resistencia de 1500W adquirido de un sistema de secadora de cabello comercial. Se controla mediante el circuito de potencia que está basado en un integrado MOC y tiristores.. 37.
(47) Para detalles de todas las topologías e integrados usados en esta etapa del proyecto consulte el anexo Características de sensores y actuadores y Circuitos Empleados.. +12V. r=. D1. 12V. D1 N4004 D2. (:). D3. R8. D4. R9. '~~D1N4148. V·./1.----~. ......,:,----+----<. 1 Ok. 1. +12V. t i~. 1.394. o vcc R4 o---Pcc.1.1_ _.V\i',. Microcontrolador. 1kl~. 22ó¡G2I Y:. X1. R5 C1. L1. ,~~:;~;"'--O. -1n ;i; ';:Lb/. / I. MAC15-10. Linea. Q2N3904. Figura 3.4.4. 2 Circuito de aislamiento, detector de cruce por cero y alimentación al conjunto motor-resistencia. +12 D1N4004. ~2. N. ~-----·s. U7. .. L-1-------<Ambos Focos 120W. Circuilo-Oscilador. 1. .)'l<'.~ ~ ;",,. t". o Relay_SPDT. -12. Figura 3.2.4.3 Selector de potencia para focos incandescentes. 38.
(48) 4 ',. ). 1. 11 (. U8LM7805C. 1uF. ~. 1. ~. ( 2. ~. 1 IN. ~ :--~4800uF I I e_:. '-. i,J :-o--! Motor de OC. OUT 2. G~JD. ~ 1OOnF. I. 3J. 1 >--1--~ ~---1 Jo. XFMRICT-SEC. ~-------~. 1. Figura 3.4.4.4 Circuito de alimentación para ventilador de mezcla de aire. Generador. +12 D1N4004 D13. +12. R12. 1. poi. l. o. Vsensor. +2.21V. U9. +1182 5. ~-~2--1+'·,,_. V -. 3 -. ,. J'. /. ---~. Q2N3904 R13. D1N4004. V-...--G-:---~VV\ r r. LM311/~~ -12. BOl/11. QS. D9 Relay_SPDT. 4.7k 2.2k fR14l. Jo. o. o. Figura 3.4.4.5 Circuito de control de humedad.
(49) 3.4.5 Consumo de potencia. Consumo de potencia teórica El consumo de potencia del prototipo lo podemos clasificar en:. a). Consumo de la etapa de potencia:. Conjunto motor/calefactor Focos incandescentes Humidificador. = 800Wmáx = 120Wmáx = 45Wmáx. Consumo Total= 980W. b). Consumo del sistema electrónico:. Detector de cruce por cero Interfase del microcontrolador Etapa de relevadores Etapa de amplificación. = 0.135Wmáx. = 0.50Wmáx = 0.45Wmáx. = 0.24Wmáx. Consumo Total= 1.325W. Consumo total del prototipo= 966.325W. 40.
(50) 4. Pruebas al prototipo. Una vez construido el prototipo, se procedió a realizar pruebas de cada uno de los sistemas. Ya integrados éstos, implementamos el algoritmo de control sobre nuestra planta. El algoritmo planteado consistió en primera instancia de nueve reglas que determinan la acción del conjunto motorresistencia calefactor. Se establecieron 8 constantes de tiempo, las cuales son elegidas dependiendo del resultado obtenido de la evaluación y el peso de los polinomios del controlador. Cada medio ciclo de la señal de alimentación de entrada AC se aplica un pulso al TRIAC de duración de 0.5ms con el fin de activarlo hasta que la señal de alimentación regresara a cero y con el cambio de polaridad éste se apague. Las constantes determinan el tiempo de espera para activar dicho pulso. Con el fin de comprobar el funcionamiento del circuito de cruce por cero y la secuencia de disparo se realizó una prueba con una carga puramente resistiva (un foco). Con esto se comprobó que al modificar la constante de tiempo se modificaba la intensidad de la luz. Las constantes especificadas en el algoritmo de control fueron las siguientes:. Constante de tiempo. Timer O del µcontrolador. 8 ms 5 ms 4 ms 3.5 ms 3 ms 2.5 ms 1 ms 0.5 ms. E0C0 H EC78 H F060 H F254 H F448 H F63C H FC18 H FE1C H. Tabla 4. 1 Constantes o'e tiempo. De acuerdo con las reglas programadas al producirse un error negativo es necesario que el ángulo de disparo para el accionar del conjunto motor-resistencia sea máximo. De este modo su acción sería mínima y el enfriamiento se daría por medio del ventilador de mezcla de aire. Los resultados obtenidos con este control fueron los siguientes:. Respuesta. '5 + - - - ~ - - - - - - -- - - ~ - - - - , ,o o. ". 20. 25. 35. Tiempo (cada marca rapraaenl11 cinco segundo•). Figura 4. 1 Respuesta de la planta. 41. ". ".
(51) Al observar que tanto en Fase 1 (referencia 34ºC) como Fase 2 (referencia 29ºC) no se lograba alcanzar la referencia, sino que se sobrepasaba, se determinó que el enfriamiento del ventilador de mezcla no era suficiente en compañía del calentamiento provisto por el conjunto motor-resistencia. Al ampliar el pulso de espera de las constantes para los casos en que se necesitaba un mínimo de calentamiento se observó que el comportamiento mostrado anteriormente se mantenía. El análisis de estabilidad por plano de fase arrojó lo siguiente:. Para Fase 1 Para Fase 2. Tabla 4.2 Análisis de fase. Con el conocimiento adquirido mediante las pruebas se observó que para que el sistema enfríe es necesario apagar el conjunto motor-resistencia y permitir que el ventilador de mezcla actúe, por lo que el algoritmo de control fue modificado de modo que cuando se alcanzaran los casos de error negativo (es decir, cuando se ha sobrepasado la referencia) el conjunto motor-resistencia se apagara y dejara actuar al ventilador de mezcla. Esta modificación es permitida por la lógica difusa y es un ejemplo de cómo se aprovecha el conocimiento experto para modificar el comportamiento de la planta bajo un control difuso. Tomando en cuenta lo anterior se contempló la posibilidad de modificar las constantes de tiempo y su relación con los polinomios a modo de que fuera posible afinar la respuesta de la planta antes de alcanzar la referencia.. Las constantes de tiempo modificadas resultaron: Constante de tiemoo. Timer O del JJCOntrolador. ApaQado 6.8 ms 6.5ms 6ms 5ms 2.5 ms 1 ms 0.5 ms. Bandera de control E570H E69CH E890H EC78H F63CH FC18 H FE1CH. Tabla 4.3 Constantes de tiempo. Al realizar las pruebas con la constante de Bms el conjunto motor-resistencia mostraba un comportamiento forzado dado que el ciclo de trabajo con tal constante es muy pequeño, Además el motor, al ser una carga de naturaleza inductiva-resistiva, presentaba un comportamiento de carga y descarga continua. Por ello la constante se sustituyó por una bandera que también apaga el conjunto motor resistencia.. 42.
(52) Con estas modificaciones el comportamiento de la planta fue el siguiente para el caso de la fase 1:. Respuesta. u 2s +--~-. L.. "----'-----------------------;. f!. :,. ~~ ., - - - - - - - - - - - - - - - - - - - - - - ~ c.. E ., 15 + - - - - - - - - - - - - - - - - - - - - - - - ~ t--. o+------ -15- - - - - - - - - ~ o 10 35 - - - -~ 20. 25. JO. 40. 45. Tiempo (cada marca representa 5 segundos). Figura 4.2 Respuesta de la planta al control modificado (Fase 1). En este caso la figura 4.1 muestra cómo se alcanza la referencia y se mantiene, lográndose el objetivo planteado. El cambio entre cada una de las fases toma un tiempo típico de 1.5 minutos y se debe a que el ventilador de mezcla tarda en enfriar la cámara. Este lapso de tiempo es adecuado ya que permite una transición suave de temperatura, idónea para el cuidado de las crías. Si se desea arrancar el sistema desde la temperatura ambiente y alcanzar la referencia de fase 2 (29ºC) se tiene el siguiente comportamiento: Respu1!sta. 35 ~ - - - - - - - - - - - - - - - - - - - - - - ~ --- Referencia. ~. ::! 20 + - - - - - - - - - - - - - - - - - - - - - - - --<. a. I! ~ 15 + - - - - - - - - - - - - - - - - - - - - - - - - - 1. ~ 10 + - - - - - - - - - - - - - - - - - - - - - - - - - <. 10. 15. 20. 25. JO. 35. 45. Tiempo (cada marca representa 5 segundos). Figura 4.3 Respuesta de la planta al algoritmo de control modificado (Fase 2). 43.
(53) Al analizar las reglas que son activadas se obtuvo el siguiente plano de fase:. Para Fase 1 Para Fase 2. Tabla 4.4 Análisis de fase con control modificado. De esta forma se observa que se alcanza la referencia y se permanece en ella. Esto es evidente al tener que en el plano de fase se tiene como punto final alguna de las casillas correspondientes al error cero. Con ello se cumplen los objetivos de control de temperatura. En cuanto al control de humedad, los resultados fueron satisfactorios ya que se logró mantener la humedad relativa en un 37% constante, con una varianza máxima de 3%. El sistema responde en un tiempo despreciable, 0.2s, y es completamente estable con la referencia. Tiene una rápida recuperación, gracias a la respuesta del sensor, que además de ser completamente lineal, tiene un grado de precisión suficiente para nuestro prototipo {0.3%}. El generador de humedad usado tiene un tiempo de respuesta de 1s y es capaz de suministrar humedad a la cámara de erra por 15 horas continuas. Cabe destacar que el sistema de control de humedad es completamente independiente al sistema de control difuso de temperatura descrito anteriormente. Referente al control de luminosidad de la cámara de erra podemos afirmar que cumplió con los parámetros requeridos de producción animal. El sistema de iluminación tiene dos intensidades previamente calibradas para lograr la cantidad de candelas necesarias para el sano desarrollo de las erras avícolas, esto es, 400 y 250 cand. respectivamente {ver Diseño Electrónico para más detalles). El sistema es activado de manera externa por el operario, mediante la interfase digital y se mantiene constante en ambas fases con una eficiencia de 75% {según hoja de especificaciones de Philips}.. 44.
(54) 5 Conclusiones De acuerdo con lo observado en las pruebas, se cumplieron los objetivos de control de temperatura por medio de la lógica difusa además de cumplir con los parámetros de humedad y luminosidad en cada una de las fases de la cámara de cría. Los límites establecidos para cada uno de los parámetros fueron respetados. En un principio se había planteado un control con 25 reglas 1; sin embargo el número fue reducido dado que con 9 reglas se puede cumplir cabalmente con los objetivos planteados, además de que la capacidad de procesamiento del microcontrolador utilizado se optimiza. El conocimiento experto se pudo traducir en un menor número de reglas En el caso del control formulado con nueve reglas se pudo apreciar que existen reglas y polinomios que no fueron activados durante las pruebas realizadas, como el caso de los polinomios 4 y 7, que corresponden a las reglas siguientes: Regla 4: Si E es cero y EINT es negativo, entonces calienta muy poco. Regla 7: Si E es positivo y EINT es negativo, entonces calienta bastante. No obstante, las reglas se conservaron contemplando la posibilidad de que puedan ocurrir los casos a los que se refieren. El primer controlador difuso implementado en la cámara de cría presentó problemas para alcanzar la referencia en cualquiera de las fases. Por ello fue modificado para permitir el enfriamiento de la misma. Para evitar un sobrecalentamiento y tener un control más robusto con posibilidad de mejora, el sistema debería contar con un ventilador de enfriamiento controlado. Éste se limitaría a actuar en los casos en que se haya alcanzado y se esté rebasando la referencia. El uso de un controlador de tipo Sugeno facilitó el diseño del algoritmo de control en la arquitectura del lntel 8051. Para poder implementar dicho algoritmo se hicieron ajustes en las escalas del error y el error integral a modo de utilizar números enteros de 8 bits y positivos en el microcontrolador. El manejo de fracciones decimales, redondeo y números negativos se hizo por medio de banderas. De esta forma los cálculos fueron simplificados sin usar números de 16 bits o con signo. Si bien el controlador tipo Mamdani tiene como ventaja incorporar de manera más sencilla el conocimiento experto, con el controlador tipo Sugeno y la manipulación de los polinomios se logró establecer una relación entre los resultados de los mismos y los valores de la señal de control. Así fue posible traducir de un modo heurístico la variable lingüística correspondiente a cada regla con la acción que se deseaba implementar. Al utilizar el microprocesador arquitectura lntel 80!51 se ahorró considerablemente en términos de procesamiento y de costo, pues no se utilizó un microprocesador o tarjeta de mayor capacidad. El uso de un microprocesador de la capacidad del lntel 8051 se justifica al notar que los sensores y convertidores con que fue elaborado el prototipo no son de una alta resolución, lo que hubiera demandado un mayor número de bits por lectura. Finalmente, el prototipo tiene un buen desempeño y si se deseara hacerle mejoras sería conveniente construir una etapa dedicada exclusivamente al enfriamiento y ajustar el controlador para operarla. También sería conveniente evaluar la posibilidad de utilizar sensores y etapas de conversión analógica-digital de mayor resolución así como un procesador de mayor capacidad si se desea mayor exactitud en las mediciones. Esto aumentaría el costo general de la incubadora/nacedora, no obstante, se obtendría un control más fino y exacto. ' Ver subtema 3.3: Simulación del sistema de control en MA TLAB. 45.
(55) 6 Bibliografía [1]. A.K. David, "Expert System with Fuzzy Sets far Optimal Long Range Operation Planning", IEEE Transactions on Power Systems, Vol. 6, No. 1, Febrero 1991. [2] Babin S., Water Vapor Myths: A brief tutoría/, EUA: McGraw Hill, 1993 [3] Baturone. Microelectronic Design of Fuzzy Logic Based Systems. CRC Press lnternational, 2000. [4] B. Bauer, IEEE-PES Winter Meeting, 2000 [5] B. Kosko, Fuzzy Thinking. The New Science of Fuzzy New York: Hyperion, 1993. [6] B. Kosko, Neural Networks and Fuzzy Systems: A Dynamical Systems Approach on Machine lntelligence, EUA: Prentice Hall, 1996 [7] Chow, IEEE-PES Winter Meeting, 2000. [8} D. Driankov, An lntroduction to Fuzzy Control, 2da ed., EUA, Springer, 1996. [9] E. Cox, The Fuzzy Systems Handbook, Academic Press, 1994. [10] Chow, IEEE-PES Winter Meeting, 2000. (11}. G. J. Klir and T. A. Folger, Fuzzy Sets, Uncertainty, and lnformation, New Jersey: Prentice Hall, 1988.. [12]. J.A. Momoh, X.W. Ma, K. Tomosovic, "Overview and Literature Survey of Fuzzy Set Theory in Power Systems", IEEE Transactions on Power Systems, Vol. 10, No. 3, Agosto, 1995. [13]. J. K. Chow, "Fuzzy Systems", CRC Press Industrial Electronics Handbook, D. lrwin, CRC, 1996. [14]. J. Pérez, Electrónica General Guía Didáctica, México: McGraw Hill, 1996. [15]. J.R. Jang, "Neuro-Fuzzy Modeling and Control", Proceedings of the IEEE, Vol 38. No. 3, Marzo, 1995, pp 378-405. [16]. J. Voracek, Lecture : Fuzzy Expert Systems, artículo disponible en línea www.it.lut.fi/kurssit/02-03/010595002/ block_a24/block_a24_9.pdf, consultado el 21 septiembre de 2003.. [17]. L.A. Zadeh, "Fuzzy Sets", lnformation and Control, Vol. 8, New York Academic Press, 1965, pp. 338-353. [18]. S. Franco, Design with Operacional Amplifiers and Analog lntegrated Circuits, EUA: McGraw Hill, 1996. [19] [20]. en de. S. Franco, Electric Circuits Fundamentals, EUA: McGraw Hill, 1996 V. Miranda, J.T. Saraiva, "Fuzzy Modeling of Power System Optima! Power Flow", IEEE Transactions on Power Systems, Vol. 7, No. 2, Mayo 1992. 46.
(56) a.. Secretaría de Agricultura, Ganadería, Desarrollo Rural, Pesca y Alimentación (SAGARPA). b.. Instituto Nacional de Estadística, Geografía e Informática (INEGI). c.. Documentación de Honeywell disponible en http://www.honeywell.com. d.. Documentación de National Semiconductor disponible en http://www.national.com/. e.. http://www.una.com.mx/una/display.php. f.. http://www.avicola.com.mx/. g.. http://www-2.cs.cmu.edu/Groups/Al/html/faqs/ai/fuzzy/part1 /faq.html. h.. http://www.abo.fi/-rfuller/fuzs.html. i.. http://www.austinlinks.com/Fuzzy/. 47.
Figure



+7





Documento similar
En este ensayo de 24 semanas, las exacerbaciones del asma (definidas por el aumento temporal de la dosis administrada de corticosteroide oral durante un mínimo de 3 días) se
En un estudio clínico en niños y adolescentes de 10-24 años de edad con diabetes mellitus tipo 2, 39 pacientes fueron aleatorizados a dapagliflozina 10 mg y 33 a placebo,
• Descripción de los riesgos importantes de enfermedad pulmonar intersticial/neumonitis asociados al uso de trastuzumab deruxtecán. • Descripción de los principales signos
Memorias de ultratumba de F.-R. de Chateaubriand, en traducción anónima (1849-1850) Marta Giné Janer
Además de aparecer en forma de volumen, las Memorias conocieron una primera difusión, a los tres meses de la muerte del autor, en las páginas de La Presse en forma de folletín,
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
