Comparación de algoritmos de segmentación sobre imágenes de hematología celular
91
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica CENTRO DE ESTUDIOS DE ELECTRÓNICA Y TECNOLOGÍAS DE LA INFORMACIÓN. TRABAJO DE DIPLOMA Comparación de Algoritmos de Segmentación sobre Imágenes de Hematología Celular Autor: Yusnielys Rodríguez Gutierrez. Tutores: Dr. C. Juan Valentín Lorenzo Ginori [email protected] Ing. Arnaldo Moreno Montes de Oca [email protected] Santa Clara 2012 "Año 54 de la Revolución”.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Biomédica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Sólo renuncian a la calidad los que no la poseen, ni tienen voluntad ni talento para alcanzarla. “Ernesto Guevara de la Serna”.
(5) ii. DEDICATORIA. A la memoria de mi abuela Paula Victoria Valdés Pérez por ser mi motor impulsor. A mis padres que día a día han dado lo mejor de sí para que yo llegue donde estoy. A mi hermana por su ayuda en momentos difíciles. A todas esas personas que confiaron en mí y me dieron fuerzas para seguir adelante en momentos cuando pensaba que no podía..
(6) iii. AGRADECIMIENTOS. A mis padres por su gran labor en todos estos años de estudio que he tenido. A mi tutor, el Dr. C. Juan Valentín Lorenzo Ginori, por la oportunidad de trabajar bajo su asesoría en un mundo desconocido para mí; agradezco todas sus enseñanzas y sobre todo, su gran paciencia. A mi tutor Arnaldo Moreno Montes de Oca por su dedicación. A mis amigas Lumey y Mayumi por su amistad y ayuda en momentos difíciles. A mi amigo Cristóbal Ríos por su guía, apoyo y sobre todo por sus consejos. A todos mis compañeros que he conocido durante la carrera que hicieron mi estancia en la universidad tan amena y memorable, y que compartieron conmigo estos inolvidables años. A mi novio Reinier Moya Pérez por su apoyo y comprensión. A mis suegros Esther y Humbe por su ayuda, paciencia y dedicación. A ellos y a todos aquellos que me acompañan, o me han acompañado, gracias..
(7) iv. TAREA TÉCNICA. Revisión bibliográfica y estudio de los algoritmos de segmentación más utilizados sobre imágenes de hematología celular. Investigación y estudio de los métodos matemáticos que permitan evaluar algoritmos de segmentación. Aplicación de diferentes algoritmos de segmentación sobre imágenes sintéticas de hematología celular. Evaluación de los resultados obtenidos mediante pruebas objetivas por medios de computación.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. El análisis automatizado de imágenes de microscopía celular es de gran importancia producto de los grandes niveles de información que actualmente se generan en diferentes aplicaciones. En Cuba, el análisis de imágenes del frotis de sangre humana con el fin de detectar la malaria se hace de forma manual. La automatización de dicho proceso mediante la aplicación de técnicas de procesamiento digital de imágenes resultaría una herramienta de gran aplicación. Este trabajo contribuye al desarrollo de un sistema computacional de análisis de imágenes de microscopía celular, el cual actualmente no existe en nuestro medio y su adquisición sería muy costosa. Con esto se contribuye a dar una solución a la constante demanda de personal médico calificado para el análisis de dichas imágenes. En los sistemas computacionales de análisis de imágenes de microscopía celular los algoritmos de segmentación constituyen el elemento crítico, por tanto, conocer cuales algoritmos brindan los mejores resultados adquiere una importancia especial. Este trabajo compara métodos de segmentación aplicándolos sobre imágenes sintéticas de hematología celular conteniendo solamente eritrocitos. Además realiza un análisis evaluativo y estadístico de los resultados obtenidos en la segmentación de las imágenes. Se pudo comprobar que de. los métodos de segmentación seleccionados: k-medias,. algoritmo de Otsu, transformada watershed y conjuntos de nivel, este último obtuvo mayor precisión, a cambio de un mayor tiempo, para segmentar dichas imágenes..
(9) vi TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 4 CAPÍTULO 1.. GENERALIDADES Y FUNDAMENTOS TEÓRICOS .......................... 5. 1.1. Introducción ............................................................................................................. 5. 1.2. Características de las células presentes en un extendido de sangre humana............ 5. 1.3. Fundamentos teóricos sobre algoritmos de segmentación ....................................... 7. 1.3.1. Algoritmo de segmentación Lloyd o k-medias ................................................. 8. 1.3.2. Algoritmo de segmentación de Otsu ................................................................. 9. 1.3.3. Algoritmo de segmentación mediante la transformada watershed ................. 10. 1.3.3.1. Gradiente morfológico ................................................................................ 11. 1.3.3.2. Otras operaciones importantes del procesamiento morfológico de imágenes. en escala de grises ......................................................................................................... 12 1.3.4 1.4. Algoritmo de segmentación por conjuntos de nivel (Level Sets).................... 14. Antecedentes de los algoritmos de segmentación sobre imágenes de hematología. celular................................................................................................................................ 15 1.5. Fundamentos teóricos de métodos para evaluar algoritmos de segmentación ....... 16. 1.5.1. Coeficiente de Dice ......................................................................................... 17.
(10) vii 1.5.2. Coeficiente de Jaccard .................................................................................... 17. 1.5.3. Distancia de Vinet ........................................................................................... 18. 1.6. Imágenes sintéticas................................................................................................. 18. 1.7. Antecedentes de la aplicación de algoritmos de segmentación a imágenes. sintéticas............................................................................................................................ 19 1.8. Conclusiones del capítulo 1 ................................................................................... 20. CAPÍTULO 2.. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS .............................. 21. 2.1. Introducción ........................................................................................................... 21. 2.2. Herramientas empleadas ........................................................................................ 21. 2.2.1. Laboratorio de matrices (MATLAB) .............................................................. 21. 2.4.1. Implementación del algoritmo k-medias ........................................................ 23. 2.4.2. Implementación del algoritmo de Otsu ........................................................... 24. 2.4.3. Implementación del algoritmo mediante la transformada watershed ............. 25. 2.4.4. Implemetación del algoritmo por conjuntos de nivel (Level Sets).................. 25. 2.5. Comparación de los resultados de la segmentación ............................................... 26. 2.5.1. Implementación del cálculo de los coeficientes de Dice y Jaccard en. MATLAB...................................................................................................................... 27 2.5.2. Implementación de la distancia de Vinet ........................................................ 29. 2.6. Pasos adicionales en el proceso de segmentación .................................................. 29. 2.7. Método estadístico ................................................................................................. 30. 2.8. Conclusiones del capítulo 2 ................................................................................... 31. CAPÍTULO 3.. RESULTADOS Y DISCUSIÓN ............................................................. 32. 3.1. Introducción ........................................................................................................... 32. 3.2. Resultados obtenidos en el proceso de segmentación eliminando los objetos que. tocan los bordes en las imágenes ...................................................................................... 32.
(11) viii 3.2.1. Resultados de la segmentación aplicando el método de k-medias ................. 32. 3.2.2. Resultados de la segmentación aplicando el algoritmo de Otsu ..................... 33. 3.2.3. Resultados de la segmentación aplicando la transformada watershed ........... 34. 3.2.4. Resultados de la segmentación aplicando el método de conjuntos de nivel ... 35. 3.2.5. Pasos adicionales en el proceso de segmentación .......................................... 35. 3.2.5.1. Consecuencias de eliminar las células que tocan los bordes en las. imágenes 37 3.3. Resultados obtenidos en el proceso de segmentación sin eliminar las células que. tocan los bordes en las imágenes ...................................................................................... 38 3.3.1. Resultados de la segmentación aplicando el método de k-medias ................. 38. 3.3.2. Resultados de la segmentación aplicando el algoritmo de Otsu ..................... 39. 3.3.3. Resultados de la segmentación aplicando la transformada watershed ........... 40. 3.3.4. Resultados de la segmentación aplicando el método de conjuntos de nivel ... 41. 3.4. Análisis estadístico de los resultados obtenidos..................................................... 42. 3.4.1. Resultados estadísticos de los métodos de evaluación ................................... 42. 3.4.2. Resultados del cálculo de los tiempos de ejecución ....................................... 45. 3.4.3. Resultados obtenidos en la prueba de Friedman ............................................. 46. 3.5. Conclusiones del Capítulo...................................................................................... 49. CONCLUSIONES ................................................................................................................ 50 RECOMENDACIONES ....................................................................................................... 51 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 52 ANEXOS .............................................................................................................................. 56 Anexo I. Diferentes células presentes en un extendido de sangre humana ................... 56. Anexo II. Implementación de las funciones utilizadas para la segmentación y. evaluación. 62.
(12) ix Anexo III. Tablas Empleadas........................................................................................ 72.
(13) INTRODUCCIÓN. 1. INTRODUCCIÓN. El procesamiento digital de imágenes se puede definir como un conjunto de procedimientos que se realizan sobre una imagen digital para su almacenamiento, transmisión, reconocimiento, análisis e interpretación. Esta técnica es una de las ramas de la ciencia que más desarrollo ha experimentado en las últimas tres décadas debido fundamentalmente a dos factores: primero, al avance vertiginoso que se ha originado en el “hardware”, en particular, en los procesadores especializados, en los arreglos de procesadores y en las computadoras digitales; y segundo, a la importancia que esta técnica ha adquirido en la vida moderna. Entre los varios ejemplos que evidencian los beneficios del procesamiento digital de imágenes (PDI) se encuentran: la utilización de la robótica en la industria, el empleo de procedimientos avanzados en la medicina y, en general, en el mejoramiento y análisis de imágenes biomédicas, etcétera. En la actualidad tareas como análisis de sangre, tejidos y sustancias están relacionados con el uso e interpretación de imágenes médicas que contienen partículas, células y microorganismos, estas tareas son realizadas por expertos humanos. Cuando se tiene la tarea de estudiar un gran número de imágenes, el trabajo de analizarlas se vuelve tedioso, monótono y propenso a errores. Para poder automatizar las tareas relacionadas con el uso de imágenes en microscopía celular, resulta necesario desarrollar algoritmos de análisis de imágenes que sirvan como herramientas para el analista humano. El presente trabajo pretende implementar diferentes algoritmos de segmentación y evaluar su efectividad mediante métodos estadísticos, de modo que se conozca cual es más efectivo en la manipulación de las células presentes en un extendido de sangre humana. Debido a la gran cantidad de algoritmos de segmentación de imágenes que han sido desarrollados y que eventualmente puedan aparecer, ya que esta es un área muy activa de la.
(14) INTRODUCCIÓN. 2. investigación, se hace imprescindible disponer de herramientas para la evaluación comparativa de los mismos en aplicaciones específicas. Las aplicaciones de análisis de imágenes que hacen uso de la segmentación, son fundamentales, ya que esto equivale a realizar funciones preceptuales parecidas a las del ser humano, donde se distinguen los diferentes objetos que forman a una imagen, esto supone la capacidad de extraer los objetos de interés. Para la realización del presente trabajo se emplean los algoritmos de segmentación de k-medias, Otsu, la transformada watershed y por conjuntos de nivel o Level Sets. El primero, es un algoritmo para agrupamiento de puntos de datos dentro de determinado número de categorías, usado para el agrupamiento según el método conocido como k-medias, y está orientado hacia las imágenes a color. El algoritmo de Otsu es un método de detección de umbrales que utiliza técnicas estadísticas, para analizar la dispersión de los niveles de grises. El algoritmo de segmentación mediante la transformada watershed se basa en el análisis de una representación tridimensional de la superficie de intensidad en una imagen, mediante técnicas de procesamiento morfológico. El último algoritmo mencionado, conjuntos de nivel, encuentra el nivel cero de una cierta función asociada a la imagen en la cual se definen contornos iniciales, que evolucionan durante la ejecución del algoritmo hacia el resultado final de la segmentación. Para incrementar la efectividad de la evaluación de la segmentación se utilizan imágenes sintéticas creadas especialmente para este propósito, para las cuales se conoce exactamente el resultado que debe obtenerse en el proceso de segmentación. A pesar de que existen numerosos algoritmos para la segmentación de imágenes de microscopía celular, hasta donde la autora conoce en Cuba no se ha generalizado la aplicación de algún mecanismo computacional para analizar este tipo de imágenes de manera automática. Una de las aplicaciones fundamentales se puede encontrar en el desarrollo de medicamentos, donde los resultados pueden estar relacionados con la aparición o no de ciertas células y por tanto el conteo de las mismas se convierte en la tarea fundamental. Es así que la segmentación de imágenes sintéticas que permitan evaluar y comparar varios algoritmos de segmentación adquiere una importancia especial en la selección y desarrollo de nuevos algoritmos..
(15) INTRODUCCIÓN. 3. Esta investigación se hace tomando en cuenta los lineamientos del VI Congreso del PCC 131 y 132 que plantean: 131. Sostener y desarrollar los resultados alcanzados en el campo de la biotecnología, la producción médico-farmacéutica, la industria del software y el proceso de informatización de la sociedad, las ciencias básicas, las ciencias naturales, los estudios y el empleo de las fuentes de energía renovables, las tecnologías sociales y educativas, la transferencia tecnológica industrial, la producción de equipos de tecnología avanzada, la nanotecnología y los servicios científicos y tecnológicos de alto valor agregado. 132. Perfeccionar las condiciones organizativas, jurídicas e institucionales para establecer tipos de organización económica que garanticen la combinación de investigación científica e innovación tecnológica, desarrollo rápido y eficaz de nuevos productos y servicios, su producción eficiente con estándares de calidad apropiados y la gestión comercializadora interna y exportadora, que se revierta en un aporte a la sociedad y en estimular la reproducción del ciclo. Extender estos conceptos a la actividad científica de las universidades. De lo anteriormente expuesto se desprenden las siguientes interrogantes científicas: ¿Cuáles son los métodos matemáticos que permiten segmentar las imágenes de microscopía celular? ¿Cómo evaluar las imágenes sintéticas segmentadas? ¿Cuáles son los algoritmos que mejores resultados presentan en esta esfera? Para dar respuesta a las interrogantes científicas se plantearon los siguientes objetivos: OBJETIVO GENERAL Comparar diferentes algoritmos de segmentación aplicándolos sobre imágenes sintéticas de hematología celular. OBJETIVOS ESPECÍFICOS Seleccionar y estudiar la metodología de aplicación de un grupo de algoritmos de segmentación para compararlos entre sí..
(16) INTRODUCCIÓN. 4. Segmentar empleando los algoritmos seleccionados un conjunto de imágenes sintéticas de hematología celular, específicamente en imágenes donde las células a segmentar son eritrocitos. Evaluar los resultados de la segmentación aplicando diferentes métodos matemáticos. HIPÓTESIS Diferentes algoritmos de segmentación aplicados a imágenes sintéticas producen diferentes resultados lo que permite determinar cuál es el más preciso. Organización del informe Para dar respuesta a estos objetivos el informe se ha estructurado en 3 capítulos que tratan las siguientes temáticas: CAPÍTULO 1: Se estudia la morfología de los tipos de células presentes en la sangre, los fundamentos teóricos de los algoritmos de segmentación, y los métodos para evaluar dichos algoritmos de segmentación. CAPÍTULO 2: Se describen los modelos matemáticos y algoritmos empleados en la segmentación de las imágenes. CAPÍTULO 3: Se comparan los algoritmos de segmentación implementados mediante diferentes análisis estadísticos..
(17) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 5. CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 1.1. Introducción. En este capítulo se presentan los fundamentos de la segmentación de imágenes de microscopía celular. Se hace una breve introducción al tema tratado, analizando las características de las células de hematología celular y los aspectos fundamentales de los algoritmos de segmentación. También se presentan, brevemente, los antecedentes de la segmentación en imágenes de hematología celular y los antecedentes de la utilización de las imágenes sintéticas en los algoritmos de segmentación. Además se abordan los fundamentos teóricos de los métodos de evaluación para algoritmos de segmentación, y los fundamentos teóricos de las imágenes sintéticas. Por último se hace referencia a las herramientas empleadas para el desarrollo del presente trabajo. 1.2. Características de las células presentes en un extendido de sangre humana. La sangre es una sustancia líquida que circula por las arterias y las venas de los organismos, la misma está compuesta por tres tipos básicos de células o elementos celulares: los eritrocitos también conocidos como glóbulos rojos o hematíes, los leucocitos nombrados comúnmente glóbulos blancos y las plaquetas. Cada uno de ellos presenta una función primordial para el correcto funcionamiento del organismo humano. De las células de la sangre los eritrocitos son los más abundantes y el principal medio que tiene el cuerpo humano de suministrar oxígeno a los tejidos. Son los responsables de la tonalidad propia de la sangre, ya que normalmente contienen hemoglobina (Hb) la cual consta de varias moléculas de hierro, cuyo mineral al cargarse de oxígeno u oxidarse, adquiere una coloración rojiza característica [1]..
(18) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 6. En ocasiones el cuerpo humano es amenazado con bacterias, microorganismos y parásitos que pueden afectar severamente la salud del ser humano, estos provienen de la boca, piel, vías respiratorias, intestinos, etc. Por fortuna el organismo consta de un sistema especial de defensa para combatir estos agentes infecciosos y tóxicos, constituidos por los leucocitos o glóbulos blancos, el sistema de macrófagos y el tejido linfoide [3]. Existen diversos tipos de leucocitos pero generalmente se encuentran en la sangre seis tipos diferentes de ellos, que se pueden dividir en polimorfos nucleares y en mononucleares. Dentro del primer grupo encontramos a los neutrófilos, eosinófilos, basófilos, estos, por tener un aspecto granuloso también se les llama granulocitos. El segundo grupo está compuesto por los monolitos y linfocitos. Además de un gran número de plaquetas que son fragmentos del séptimo grupo de leucocitos que están en la médula, el megacariocito [3]. En la figura 1.1 se puede apreciar el proceso de formación de todas las células presentes en la sangre y en el anexo I se presentan las características de cada una de ellas.. Figura 1.1 Formación de las células de la sangre.. Después de haber visto los diferentes tipos de células hematológicas que presenta el organismo humano es importante conocer la cantidad de cada tipo de células presentes en el mismo. En el anexo I se presenta la tabla donde se pueden apreciar las cantidades de.
(19) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 7. eritrocitos, leucocitos y plaquetas por litro de sangre. Se debe aclarar que estas cantidades pueden variar en dependencia de la edad, estado de salud y procedencia étnica de la persona. Los datos mostrados se corresponden a los niveles esperados en una persona adulta saludable [4]. Se puede observar que las cantidades de eritrocitos en sangre son superiores a la de los leucocitos y plaquetas, estando, los primeros en el orden de 1012 y los segundos en 109. 1.3. Fundamentos teóricos sobre algoritmos de segmentación. La segmentación puede considerarse como la partición de una escena en un conjunto de regiones no solapadas, homogéneas con respecto a algún criterio, cuya unión cubre la imagen completa. En otras palabras, el objetivo fundamental de la segmentación en el proceso del análisis de imágenes es el de separar los objetos de interés del resto no relevante el cual es considerado como fondo. En ocasiones la segmentación suele considerase como un proceso de clasificación de los objetos presentes en una escena, y también en cierta medida, equivale a su reconocimiento puesto que como consecuencia de la segmentación los diferentes objetos (entendidos como realizaciones físicas de clases o patrones abstractos) se encuentran perfectamente ubicados dentro de la imagen digital. Realizar la clasificación no es trivial ya que el nivel al que se lleva a cabo esta subdivisión depende del problema a resolver y de la imagen de partida. Es por ello que se han originado diferentes técnicas de segmentación y no se conoce de la existencia de una estrategia única que pueda resolver todos los problemas que se puedan presentar. A decir de muchos autores la segmentación termina cuando satisfaga los intereses u objetivos del observador. En cuanto a la unidad significativa que rige la segmentación, ésta suele corresponder a píxeles, regiones o contornos que muestran o disciernen una similitud en cuanto a intensidad, color, textura, gradiente local, movimiento, etc. En general, los métodos clásicos de segmentación se pueden clasificar como se indica a continuación: Métodos basados en la comparación con umbrales de los valores del histograma..
(20) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 8. Métodos basados en la detección de discontinuidades, éstos dividen la imagen a partir de cambios bruscos de los niveles de grises o de los colores. Métodos basados en la propiedad de similitud de los valores de los niveles de grises o los colores, que permiten la agrupación de puntos a partir de ciertos criterios de homogeneidad. Métodos heurísticos de segmentación, los cuales se basan en el conocimiento previo de la imagen a segmentar y en la experiencia del observador, ellos incluyen en muchas ocasiones los métodos supervisados de segmentación. A continuación se presenta una breve descripción de los algoritmos de segmentación aplicados a las imágenes sintéticas de hematología celular en este trabajo: el algoritmo de Lloyd, que utiliza la información del color en el espacio RGB, el algoritmo de segmentación watershed, basado en el análisis de una representación tridimensional de la superficie de intensidad en una imagen, el algoritmo de segmentación de Otsu, y el algoritmo de segmentación por conjuntos de nivel (Level Sets) que encuentra el nivel cero de una función asociada a la imagen y determinando contornos iniciales que evolucionan durante la ejecución del algoritmo hacia el resultado final de la segmentación. 1.3.1. Algoritmo de segmentación Lloyd o k-medias. El algoritmo de Lloyd, es un algoritmo para agrupamiento de puntos de datos dentro de determinado número de categorías, usado para el agrupamiento según el método conocido como k-medias. El diseño básico del algoritmo fue descrito por primera vez por Stuart P. Lloyd en 1982 [14]. El algoritmo de Lloyd es usado en este contexto para la segmentación de imágenes utilizando la información del color. El algoritmo realiza en esta aplicación una discretización o particionamiento del espacio de color, generando las llamadas regiones de Voronoi, que se definen mediante el uso de una medida de distancia, obteniéndose un conjunto de ejemplos representativos (prototipos o centroides de color). El objetivo del mismo es generar el conjunto de prototipos que minimice una determinada medida de distorsión o de distancia promedio..
(21) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 9. El algoritmo de Lloyd consta de los siguientes pasos: 1. Comenzar con un alfabeto inicial C1 , sea m 1 . 2. Dado un alfabeto, C m , ejecutar la iteración de Lloyd para generar un nuevo alfabeto Cm 1 . 3. Dado un alfabeto Cm. y i ; i 1,, N , subdividir el conjunto de entrada T en. particiones Ri usando la siguiente condición:. Ri. x T : d x, yi. d x, y j ; para todo j i. (1.1). 4. Calcular los centroides de cada partición para recalcular el alfabeto. Hacer Cm. 1. cent Ri . Si se generó una celda vacía en el paso 1, se asignará un vector. alternativo (en vez del cálculo del centroide) para esa celda. cent R. 1 R. xi. (1.2). xi R. 5. Calcular la distorsión media para C m 1 . Si ha cambiado en una pequeña cantidad solamente, desde la iteración anterior parar, si no, hacer m. m 1 e ir al paso 2. [29]. 1.3.2. Algoritmo de segmentación de Otsu. El algoritmo de segmentación de Otsu fue publicado en el año 1979 por Nobuyuki Otsu [28]. Este método de detección de umbrales utiliza técnicas estadísticas, para analizar la dispersión de los niveles de grises. La importancia del método de Otsu radica en que es automático, ya que no necesita supervisión humana ni información previa de la imagen antes de su procesamiento. El problema de la segmentación mediante umbrales se puede formular a partir de la teoría de la decisión estadística, donde el objetivo es minimizar el error promedio en que se incurre al asignar píxeles a uno o más grupos o clases. En el método de Otsu la solución de este problema se basa en el uso de dos parámetros: la función de densidad probabilística (FDP) de los niveles de intensidad de cada clase y la probabilidad de ocurrencia de cada clase en una aplicación dada. El método de Otsu se basa en maximizar una medida.
(22) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 10. estadística que se denomina “varianza entre clases“. Un umbral que produzca la mejor separación entre clases, en términos de los valores de intensidad de estas, será el umbral óptimo [5],[11] y [12]. El método de Otsu calcula el valor umbral de forma que la dispersión dentro de cada segmento sea lo más pequeña posible, pero al mismo tiempo la dispersión sea lo más alta posible entre segmentos diferentes. Para ello se calcula el cociente entre ambas varianzas y se busca un valor umbral para el que este cociente sea máximo, [5]. Como punto de partida tomamos dos conjuntos de puntos K 0 t y K 1 t , que serán definidos a partir del valor umbral t que es la variable que buscamos, y los dos conjuntos son el resultado deseado en la segmentación. Sea p g la probabilidad de ocurrencia del valor de gris 0. g. G ( G es el valor de gris máximo). Entonces la probabilidad de. ocurrencia de los píxeles en los dos conjuntos es: t. K 0 : P0 t. G. p g y K 1 : P1 t. pg. g 0. 1 P0 t. (1.3). g t 1. Si tomamos dos segmentos (o sea un solo valor umbral) la suma de estas dos probabilidades dará evidentemente 1. Si g es la media aritmética de los valores de gris en toda la imagen, g 0 y g 1 los valores medios dentro de cada segmento, entonces se pueden calcular las varianzas dentro de cada segmento como: 2. t 2 0. t. g. g0. 2. G. *p g y. g 0. 2 1. t. g. g1 * p g. (1.4). g t 1. La meta es mantener la varianza dentro de cada segmento lo más pequeña posible y conseguir que la varianza entre los dos segmentos sea lo más grande posible, [6]. El algoritmo de Otsu, aunque está concebido para su uso en imágenes en escala de grises, puede ser utilizado en las imágenes a color aplicándolo a sus diferentes componentes en un espacio de color dado. 1.3.3. Algoritmo de segmentación mediante la transformada watershed. La transformada watershed [5],[13] es un método de segmentación que se basa en el análisis de una representación tridimensional de la superficie de intensidad en una imagen. La palabra “watershed” designa las crestas que dividen las áreas de drenaje en un sistema.
(23) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 11. hidrográfico, asociando el concepto de cuenca, o área geográfica que drena hacia un río o embalse. La base de la transformada watershed consiste en modelar las imágenes en escala de grises como superficies topográficas, donde los valores de f(x, y) sean considerados como alturas. Existen varios enfoques teóricos y algoritmos de computación para el cálculo de la transformada watershed en imágenes, los cuales tienen en común como objetivo final, encontrar los píxeles que componen las crestas. La transformada watershed se aplica, por lo general, a tres tipos de imágenes: la imagen original en escala de grises, la imagen del gradiente y la imagen correspondiente al negativo de la transformada de distancia. La aplicación directa del algoritmo de segmentación watershed generalmente provoca una sobresegmentación, debida al ruido y a otras irregularidades locales del gradiente. La sobresegmentación puede afectar tanto, que el resultado obtenido por el algoritmo sea inservible. En estos casos una (entre otras) solución a este problema es limitar el número de regiones permisibles mediante la incorporación de una etapa de preprocesamiento diseñada para brindar información adicional al proceso de segmentación. Un método usado para controlar la sobresegmentación está basado en el concepto de los llamados marcadores, que son. componentes. conectadas. pertenecientes. a. la. imagen.. Para. controlar. la. sobresegmentación existen dos tipos de marcadores, los marcadores internos, asociados con los objetos de interés, y los marcadores externos, asociados con el fondo. Tanto los marcadores internos como los externos son utilizados para modificar la imagen a segmentar usando un procedimiento morfológico llamado imposición de mínimos, del cual se hablará más adelante. Para poder describir el proceso de la segmentación mediante la transformada watershed, es necesario introducir las siguientes definiciones de operaciones de procesamiento morfológico de imágenes en escala de grises, las cuales son empleadas en este trabajo, dichas operaciones tienen una implementación en diferentes funciones de MATLAB. 1.3.3.1 Gradiente morfológico Existen varias formas de definir los gradientes en una imagen en escala de grises, destacándose los gradientes basados en operadores derivativos como por ejemplo Sobel [5]. Otra formulación.
(24) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 12. importante es el gradiente morfológico, el cual tiene como ventaja, que tiende a depender menos de la direccionalidad de los bordes. El gradiente morfológico de una imagen (f) es definido por:. (1.5) donde ge y gi son elementos estructurales (EE) centrados cerca del origen. El gradiente morfológico acentúa los puntos de las transiciones de los niveles de grises en una imagen de intensidad. Como en el caso de los gradientes diferenciales, el gradiente morfológico puede ser utilizado en conjunción con la comparación con umbrales para realizar la detección de bordes en escala de grises. El histograma de la imagen del gradiente es usado para determinar un valor de umbral y el resultado de comparar el gradiente con los umbrales permite obtener la imagen del borde. Al igual que en los gradientes diferenciales, el procedimiento puede presentar problemas debidos a la no uniformidad de la intensidad del gradiente [5],[13]. 1.3.3.2 Otras operaciones importantes del procesamiento morfológico de imágenes en escala de grises Transformada H- mínima La “transformada H- mínima” de una función f es una operación morfológica en escala de grises que tiene el efecto siguiente: 1. Suprime todos los mínimos en la imagen de intensidad cuyas profundidades sean menores que h, siendo h un valor escalar. 2. Reduce en h la profundidad de todos los mínimos cuya profundidad sea mayor que h. Los mínimos regionales son componentes conectadas de píxeles con valores de intensidad constante y donde los píxeles exteriores conectados con la frontera de la región dada tienen todos valores más altos. Un mínimo regional es una zona plana no adyacente a una zona plana con un nivel de gris más bajo [13]. Imposición de mínimos.
(25) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 13. La intensidad de una imagen se puede modificar usando la reconstrucción morfológica, a partir de una imagen binaria que tenga la localización específica de los mínimos de interés y que sea del mismo tamaño que la imagen de intensidad. La imposición de mínimos usa la reconstrucción morfológica de la imagen “máscara” con la imagen “marcadora” para imponer mínimos en los puntos deseados, de forma tal que en la imagen en escala de grises solamente tenga mínimos regionales en las regiones especificadas. Transformada de Distancia (TD) Una herramienta comúnmente usada junto con la transformada watershed para la segmentación de imágenes es la TD [5],[13]. Una distancia o métrica d es una función que asocia un valor no negativo para dos puntos cualesquiera y que satisface tres condiciones, que son las siguientes, dados los puntos x, y y w:. 1. El valor es positivo, o cero si los dos puntos coinciden. d x, y. 0 y d x, y. 0 si y solo si x. y. (1.6). 2. Cumple con la propiedad de ser reflexiva. d x, y. d y, x. (1.7). 3. Cumple con la desigualdad del triángulo. d x, y. d x, w. d w, y. (1.8). Las tres métricas más usadas son la euclidiana (dE), el tablero de ajedrez (d8) y la “cityblock” (d4) definidas de la forma siguiente:. d E x1 , y1 , x2 , y2. ( x1. x2 ) 2. ( y1. y2 ) 2. (1.9). d8 x1 , y1 , x2 , y2. max x1 x2 , y1 y2. (1.10). d4 x1, y1 , x2 , y2. x1 x2. (1.11). y1 y2. Definición de la transformada de distancia Para un conjunto A, se define la transformada de distancia de la siguiente manera: para cualquier punto x en A, TD(A)(x) es la distancia (mínima) de x al complemento de A:.
(26) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. TD A x. 1.3.4. min d x, y , y. Ac. 14 (1.12). Algoritmo de segmentación por conjuntos de nivel (Level Sets). El método de level sets fue desarrollado por Stanley Osher y James Sethian [33]. Es utilizado en muchas disciplinas, tales como el procesamiento de imágenes, gráficos de la computadora, geometría computacional y la optimización. Varias estructuras de datos se han desarrollado para facilitar el uso del método de level sets en las aplicaciones computarizadas. El método de level sets (LSM) es una técnica numérica para rastrear interfaces y formas. Este método presenta una ventaja importante ya que puede realizar cómputos numéricos que involucran curvas y superficies en una reja cartesiana fija sin tener que parametrizar estos objetos. También, el método de level sets hace muy fácil de seguir formas que cambian la topología, por ejemplo cuando una forma se hiende en dos, desarrolla agujeros, o la marcha atrás de estos funcionamientos. Todos éstos hacen una gran herramienta al método de level sets para modelar los objetos variantes en el tiempo, como la inflación de una bolsa de aire, o una gota de aceite que flota en el agua. Una forma de entender el método de conjuntos de nivel está representada en la figura 1.2. En la parte derecha ilustra varias ideas importantes sobre el método de conjuntos de nivel. En la esquina superior-izquierda se puede observar una forma; es decir, una región limitada con un límite bien definido. Debajo de él, la superficie roja es el gráfico de una función fija nivelada,. que determina esta forma, y la región llana azul representa el plano x t . El. límite de la forma es entonces el conjunto de nivel cero de , mientras la propia forma es el conjunto de puntos en el plano para que. sea positiva (el interior de la forma) o ceros (al. límite).. Figura 1.2 Representación del método de level set.
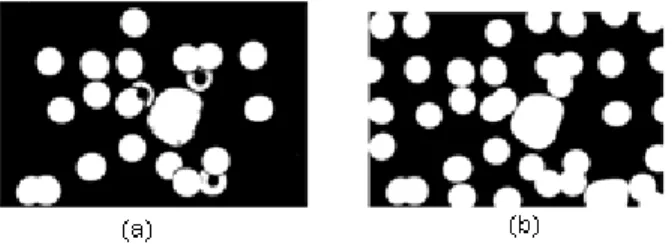
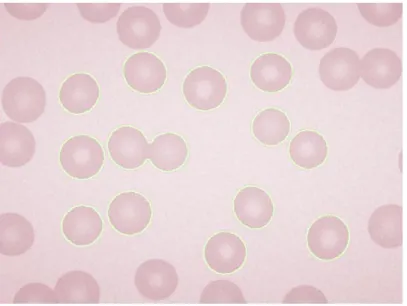
(27) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. La idea principal es definir una función uniforme conjunto fijo donde. x,t. 15. x, t , qué representa la interfaz como el. 0 . La función del conjunto de nivel o level set tiene las. propiedades siguientes: x,t. 0 para x. (1.13). x,t. 0 para x. (1.14). x,t. 0 para x. t. (1.15). 0 y. La interfaz entre la región. 0 es el límite de. y. es el nivel inicial de la. evolución. Para el cómputo un conjunto abierto evolucionado determinar la evolución de t. x,t. El borde t. ,y. .. 0. t de x,t. t , se puede definir la función. (1.16) t se da entonces por el nivel cero como:. 0. (1.17). Este borde proporciona el resultado de la segmentación de la imagen. 1.4. Antecedentes de los algoritmos de segmentación sobre imágenes de hematología celular. Existen trabajos previos relacionados con la segmentación en hematología celular, así como en sus aplicaciones. En el campo de la microscopía celular existen segmentaciones de eritrocitos y leucocitos de imágenes reales y sintéticas, ver figura 1.3 [6]. Se han realizado segmentaciones manuales y automatizadas. Las primeras carecen de efectividad ya que suelen ser imprecisas, mientras que las segundas ofrecen una mayor calidad y confiabilidad de la imagen segmentada. Para realizar la segmentación fue necesario realizar un estudio minucioso de las características de la célula que se quería segmentar. En la figura 1.4 se muestra la segmentación de eritrocitos por el método de detección de umbrales de Otsu..
(28) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 16. Figura 1.3 Resultados de la segmentación.. Figura 1.4 Eritrocitos segmentado.. 1.5. Fundamentos teóricos de métodos para evaluar algoritmos de segmentación. La segmentación es un paso fundamental en el análisis de una imagen y un problema complejo. Se han propuesto muchos métodos de segmentación en la literatura pero es difícil comparar su eficacia. Para contribuir a la solución de este problema, se han propuesto algunos criterios de evaluación para cuantificar la calidad de un resultado de segmentación. La evaluación de los resultados de un proceso de segmentación mediante la comparación con imágenes de referencia o groundtruth exige disponer de imágenes segmentadas en una forma que pueda ser considerada totalmente exacta. Este requisito es muy difícil de satisfacer utilizando imágenes reales, ya que la segmentación manual de las mismas suele ser poco precisa debido a las limitaciones inherentes a los analistas humanos. Es por esto que, para evaluar algoritmos de segmentación en microscopía celular, se utilizan imágenes simuladas lo más realistas posible, de manera que estas sean referencia en el trabajo a realizar..
(29) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 17. A continuación se presenta una breve descripción de los métodos de evaluación de los algoritmos de segmentación en este trabajo: el cálculo de los coeficientes de Dice, de Jaccard y la distancia de Vinet [6], [15]. 1.5.1. Coeficiente de Dice. El error de la segmentación automática es calculado mediante la comparación de los conjuntos resultantes de la segmentación, considerando estos como los de valor 1 en imágenes binarias, con los conjuntos correspondientes en las imágenes de referencia. Para calcular este error se emplea el método de los coeficientes de Dice; la ecuación 1.18 muestra como calcular estos coeficientes, [6]:. dice A, B. 2A B A B. (1.18). 0,1. donde A y B son las cardinalidades de los conjuntos de píxeles en las dos regiones a comparar. 1.5.2. Coeficiente de Jaccard. El coeficiente de Jaccard es, de forma similar al coeficiente de Dice, una medida de similitud entre los objetos en la imagen de referencia y los objetos segmentados. J. ,. 0. J. ,. 1. (1.19). En términos de imágenes binarias, que son resultado de un proceso de segmentación, el coeficiente de Jaccard es la proporción entre las cardinalidades de los conjuntos de píxeles en la intersección y en la unión, respectivamente, de un objeto de la imagen segmentada A y el objeto correspondiente B en la imagen de la referencia, como ilustra la figura 1.5. Los coeficientes de Jaccard, al igual que los de Dice, presentan valores entre cero y uno, un valor 1 indica una coincidencia perfecta entre los dos objetos, mientras un valor cero indica la ausencia total de coincidencia, por tanto entre más cercano a uno sean los coeficientes la imagen segmentada será más parecida a la referencia..
(30) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 18. Figura 1.5 Ilustración del cálculo de los coeficientes de Jaccard.. 1.5.3. Distancia de Vinet. La distancia de Vinet es otro método con el que se pueden evaluar los algoritmos de segmentación. Esta distancia da una medida de desigualdad entre los resultados de dos segmentaciones. Si C1. c11 , , cNC11 y C 2. c12 ,, cNC 22 son los dos conjuntos de clases a ser comparados,. se computa la superposición de la tabla T C1 ,C 2 :. T C1 , C2. card ci1. c 2j , i 1NC1 , j 1NC2. Las componentes máximas card ci1. D C1 , C2. card ci1. N C. (1.20). c 2j se conservan.. c 2j. (1.21). '. Donde N es la cantidad de píxeles de las imágenes segmentadas resultantes y C ' son las componentes seleccionadas. El valor de la distancia calculada será mayor, en la medida en que sea menor la similitud entre los conjuntos de referencia y los obtenidos de la segmentación [8]. 1.6. Imágenes sintéticas. Las imágenes sintéticas desempeñan un papel fundamental en el desarrollo del procesamiento digital de imágenes en la imaginología médica. Con la obtención de imágenes médicas sintéticas se pueden realizar innumerables trabajos y facilitar otros. Las imágenes sintéticas se obtienen mediante simulación automatizada, para ello se aplican diversos métodos de acuerdo a las principales características del objeto a simular, [2],[7] y [31]..
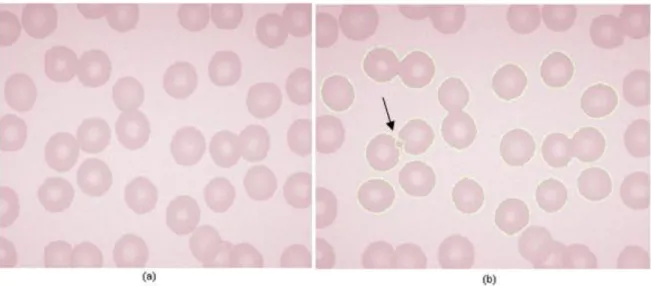
(31) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 19. Actualmente en el campo de la microscopía celular se obtienen imágenes sintéticas de formas relativamente complejas, ver figura 1.6. También se obtienen imágenes sintéticas con poblaciones de células, para así obtener resultados más completos y satisfactorios. En la figura 1.7 se muestran imágenes sintéticas de poblaciones de eritrocitos.. Figura 1.6 Imagen sintética.. Figura 1.7 Imagen sintética de una población de eritrocitos. 1.7. Antecedentes de la aplicación de algoritmos de segmentación a imágenes. sintéticas En trabajos anteriores [31] se han aplicado diferentes algoritmos de segmentación a imágenes sintéticas para una posterior evaluación y para demostrar la utilidad de las mismas. Sin embargo no se ha realizado una comparación rigurosa entre varios algoritmos de segmentación para determinar cuál o cuáles brindan los mejores resultados. Aplicar los.
(32) CAPÍTULO 1. GENERALIDADES Y FUNDAMENTOS TEÓRICOS. 20. algoritmos de segmentación en imágenes sintéticas permite disponer de antemano del resultado de la segmentación a utilizar como referencia. En la figura 1.8 se muestra la segmentación de una imagen de hematología celular empleando la transformada watershed.. Figura 1.8 Segmentación de una imagen de hematología celular empleando la transformada watershed: (a) eliminando las células que tocan los bordes y (b) sin eliminar las células que tocan los bordes.. 1.8. Conclusiones del capítulo 1 Los algoritmos de segmentación seleccionados (k-medias, algoritmo de Otsu, transformada watershed y conjuntos de nivel) pueden ser particularmente efectivos en el procesamiento de imágenes de microscopía celular y su uso es conveniente cuando se requiera analizar grandes cantidades de imágenes. En la evaluación de los algoritmos de segmentación de imágenes de hematología celular es conveniente emplear imágenes sintéticas, ya que éstas proporcionan imágenes de referencia precisas. Para evaluar cuantitativamente la calidad de la segmentación resultan efectivos los coeficientes de Dice y Jaccard y la distancia de Vinet. Es recomendable realizar el análisis comparativo mediante pruebas de hipótesis estadísticas..
(33) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 21. CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 2.1. Introducción. Este capítulo está formado por ocho epígrafes donde se abordan los materiales y métodos utilizados en el trabajo. Se abordan brevemente los métodos de segmentación mediante los algoritmos de k-medias, Otsu, transformada watershed y conjuntos de nivel, explicando la implementación en MATLAB y los criterios de comparación de forma subjetiva que se adoptaron para evaluar la calidad de los mismos. También se hace una breve descripción de las imágenes que son segmentadas para su posterior evaluación. Además se hace referencia a la implementación de los métodos de evaluación de los algoritmos de segmentación. Todas las imágenes con las cuales se trabaja se cargaron al MATLAB versión 7.4.0.287 (R2007a) con la función imread, normalizadas y convertidas a la clase doble mediante la función im2double. 2.2. Herramientas empleadas. Para la implementación de los algoritmos de segmentación y evaluación de los resultados se empleó la herramienta MATLAB y el IPT (Image Processing Toolbox) perteneciente a la misma. 2.2.1. Laboratorio de matrices (MATLAB). El MATLAB implementa un lenguaje de programación propio orientado a las aplicaciones de ingeniería. Dicho lenguaje maneja los datos en forma de matrices lo cual lo hace muy potente en los cálculos numéricos con vectores y matrices. Como caso particular puede trabajar con números escalares tanto reales como complejos, con cadenas de caracteres y con otras estructuras de información más complejas. Debido a que una imagen digital se.
(34) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 22. representa como una matriz donde sus elementos son los valores de intensidad de los píxel, este lenguaje resulta ideal para el procesamiento de imágenes y por tanto, para el presente trabajo. El MATLAB dispone de varias librerías especializadas o toolboxs orientados a las distintas aplicaciones, en el trabajo se utiliza fundamentalmente: Image Processing Toolbox. 2.3. Características de las imágenes sintéticas. Las imágenes sintéticas utilizadas fueron hechas con ayuda de la herramienta MATLAB. Presentan un tamaño de 640x480 píxeles, con una profundidad de 8 bit/pixel para cada canal de color, rojo, verde y azul. Están en formato de mapa de bit (.bmp) y son de color verdadero. Las imágenes presentan eritrocitos y leucocitos, éstos últimos son linfocitos pequeños, cada imagen tiene las máscaras respectivas a los eritrocitos, leucocitos y de la imagen completa. En la figura 2.1a se puede observar una imagen con eritrocitos solamente y en la figura 2.1b una imagen con eritrocitos y leucocitos, [31].. Figura 2.1 Imágenes sintéticas, (a) Imagen con eritrocitos y (b) imagen con eritrocitos y leucocitos.. 2.4. Algoritmos de segmentación implementados en MATLAB. A continuación se explican los pasos de los algoritmos que han sido implementados en MATLAB para el proceso de segmentación (algoritmo k-medias, método de Otsu, algoritmo mediante la transformada watershed y el algoritmo por conjuntos de nivel)..
(35) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 2.4.1. 23. Implementación del algoritmo k-medias. El diagrama de una etapa del algoritmo k-medias implementado en MATLAB se muestra en la figura 2.2, la función que se programó en MATLAB con dicho algoritmo se nombra distRGB y su programación se puede ver en el anexo II. Para la implementación del algoritmo se siguieron los siguientes pasos, según aparecen descritos en [1]: 1. Determinar inicialmente el vector del color promedio de la imagen, que se desea segmentar. 2. Obtener a partir del vector del color promedio de la imagen calculado anteriormente, dos nuevos vectores de referencia, sumándole y restándole una perturbación (que es simplemente un pequeño valor, que se tomó igual a 0.1 en este caso) al vector obtenido. 3. Calcular dos matrices de distancias del mismo tamaño que la imagen a segmentar, donde se coloca en cada elemento, la distancia euclidiana entre el píxel analizado y el nuevo vector promedio, determinándose entonces a partir de estas, las regiones de Voronoi correspondientes. Siendo las regiones de Voronoi, los conjuntos de píxeles que presentan la menor distancia con respecto a cada uno de los dos vectores de referencia. 4. Se calculan dos nuevos vectores promedio o centroides para cada una de las regiones de Voronoi, y se determinan nuevamente las distancias de todos los píxeles originales a cada uno de los centroides. De esta forma se obtiene una nueva frontera para las regiones de Voronoi, nuevos centroides y una nueva distancia promedio entre todos los vectores y sus centroides en las respectivas regiones de Voronoi. 5. El algoritmo converge cuando la diferencia entre las distancias promedio globales obtenidas en iteraciones consecutivas, es menor que cierto umbral T que se definió experimentalmente (0.1 en este caso). La función distRGB que se muestra en la línea de programa1 2.1. Como parámetro de entrada tiene una imagen en el espacio de color RGB y devuelve a la salida la imagen segmentada y su máscara correspondiente. (1). Se numeran como ecuaciones las líneas de programas de la 2.1 a la 2.4 por conveniencia..
(36) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. [segmcolor,mascaraL]=distRGB(imagen). 24 (2.1). Figura 2.2 Diagrama de una etapa en el algoritmo Lloyd. 2.4.2. Implementación del algoritmo de Otsu. Para la implementación del método de Otsu, utilizando la información relativa a la intensidad, han sido utilizadas las imágenes de intensidad para la aplicación de un algoritmo basado en umbrales. Se utiliza la función segm_Otsu que se muestra en la línea de programa 2.2, ésta tiene como argumento una imagen en escala de grises (con la función rgb2gray), normalizada y de tipo doble (con la función im2double) y devuelve la imagen segmentada, que para este caso ya es la máscara con la que posteriormente se realiza la validación estadística..
(37) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 25. Con la función graythresh se determina el umbral global de la imagen de intensidad y con la función im2bw se convierte la imagen a binaria, sobre la base del umbral calculado, todas estas son funciones de MATLAB y su programación se puede observar en el anexo II. [Segm]=segm_Otsu(imagen). 2.4.3. (2.2). Implementación del algoritmo mediante la transformada watershed. Para la implementación del método de segmentación empleando la transformada watershed, se utiliza la función SegmW que se muestra en la línea de programa 2.3, ésta tiene como argumento una imagen en escala de grises (con la función rgb2gray), normalizada y de tipo doble (con la función im2double). La función devuelve la imagen segmentada y la máscara de la misma, para el posterior análisis estadístico. [ImagSegW, mascaraW] = SegmW(imagen). (2.3). Posteriormente se calcula el gradiente de la imagen en escala de grises utilizando una máscara se Sobel. Luego al gradiente calculado se le halla la transformada watershed, mediante la función watershed del MATLAB. Los resultados no son favorables en este proceso ya que la imagen resultante presenta una excesiva sobresegmentación, con el objetivo de ser eliminado este problema se le imponen mínimos a la imagen en las regiones ocupadas por marcadores internos y externos que son previamente determinados. Los marcadores internos se calculan mediante la realización de un proceso de erosión a la imagen que fue previamente segmentada por el método de Otsu, empleando un umbral global. Los marcadores externos se calculan hallando la transformada de distancia (con la función bwdist) de la imagen de los marcadores internos, luego se le realiza la transformada watershed a la imagen obtenida de la transformada de distancia. Para la imposición de los marcadores a la imagen del gradiente se hace un OR entre ellos y se utiliza la función imimposemin. Todas estas son funciones de MATLAB y su programación se puede observar en el anexo II. 2.4.4. Implemetación del algoritmo por conjuntos de nivel (Level Sets). Para la realización de la segmentación mediante conjuntos de nivel se emplea la función drlse_segm que se muestra en la línea de programa 2.4, [32], ésta tiene como argumento una imagen en el espacio de color RGB y devuelve la máscara resultante del proceso de.
(38) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 26. segmentación. Posteriormente se toma el plano rojo de la imagen y se convierte a doble (con la función double). drlsmask=drlse_segm(image). (2.4). Mediante la función drlse_edge se realiza el crecimiento de la imagen semilla (conjunto de datos que se define para dar inicio al algoritmo) hasta que alcance el nivel cero, que es el contorno de interés en la imagen y por tanto el resultado de la segmentación. Por último para generar la máscara de la imagen segmentada se crea una matriz de ceros del mismo tamaño de la imagen segmentada. Luego se colocan en uno los valores internos a los contornos de interés y en cero el resto de la imagen, dando como resultado la máscara binaria necesaria. En el anexo II se puede observar la implementación de la función drlse_segm. 2.5. Comparación de los resultados de la segmentación. Para evaluar los resultados de la segmentación se requiere de algún conocimiento a priori y una máscara o referencia que puede provenir de un proceso sintético, computacional (como el mostrado en la figura 2.3, que es el utilizado en este trabajo) o de los expertos (en este caso la máscara es subjetiva y la confiabilidad implícita para esta referencia de segmentación debe ser conocida). En lo anteriormente mencionado se basan los criterios de evaluación supervisados; mientras que los criterios no supervisados computan cierta estadística en el resultado de la segmentación para la imagen original dada. Los criterios no supervisados de evaluación se pueden utilizar cuando no se dispone de un conocimiento a priori del resultado..
(39) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 27. Figura 2.3 Evaluación supervisada del resultado de una segmentación mediante el cómputo de disímiles medidas con una referencia.. Dentro de las distintas medidas para la evaluación supervisada se seleccionaron para aplicar en este trabajo: Coeficiente de Jaccard. Coeficiente de Dice. Distancia de Vinet. Las dos primeras medidas, aunque relacionadas entre sí, fueron seleccionadas debido a que han sido ampliamente utilizadas en diversos trabajos que aparecen en la literatura científica [15], en trabajos donde se evalúa la calidad de la segmentación. En este estudio se utilizan imágenes. celulares. de. extendidos. sanguíneos. que. presentan. objetos. aislados,. específicamente eritrocitos, situación a la cual el uso de estos coeficientes se adapta de forma satisfactoria. 2.5.1. Implementación del cálculo de los coeficientes de Dice y Jaccard en MATLAB. En la implementación del cálculo de los coeficientes intervienen dos imágenes, provenientes del correspondiente procesamiento a la imagen sintética que se esté analizando:.
(40) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 28. La imagen de referencia es una imagen real, posteriormente etiquetada (a la cual se denomina en el transcurso de este epígrafe como referencia). A la imagen segmentada se le denomina en el transcurso de este epígrafe como segmentada, para su mejor comprensión. La implementación en Matlab del cálculo de estos coeficientes que evalúan la calidad de la segmentación, se realizó pareando objeto a objeto correspondiente entre las dos imágenes involucradas en la comparación. Además se tuvo en cuenta que no necesariamente las dos imágenes tienen igual cantidad de etiquetas (objetos) y que tampoco por tener la misma cantidad de etiquetas deben quedar correctamente pareados los objetos correspondientes entre las dos imágenes, por lo que es necesario obtener el cociente adecuado entre la intersección y la unión respectivamente. Si hay un objeto en la imagen de referencia que no aparece su dual (pareja) en la imagen segmentada la intersección resultará un conjunto vacío. Generalizando, los pasos seguidos son los siguientes: 1. Se construye la matriz de las uniones entre la imagen segmentada y la referencia que será necesaria más adelante. 2. Se genera un ciclo for desde 1 hasta la cantidad de objetos (igual al mayor valor de las etiquetas) de la imagen de referencia. 3. Se selecciona el objeto correspondiente a la etiqueta y se calcula su intersección individual con la imagen segmentada, seguidamente se calcula el área de esta intersección de la etiqueta 1. 4. Se obtiene la unión de la etiqueta 1 a partir de utilizar su intersección correspondiente como semilla para reconstruir la unión. Esto se realiza mediante la función imreconstruct y a continuación se calcula el área de esta unión que es necesaria para calcular los coeficientes. Cuando el objeto no aparece en la imagen segmentada, la intersección es un conjunto vacío y no se obtiene la reconstrucción, lo cual arroja un resultado NaN (es la sigla de “not a number” y aparecen cuando se realizan.
(41) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 29. operaciones cuyo resultado queda indeterminado o no existe, por ejemplo al dividir por cero) en la ejecución del programa. 5. Se incrementa el índice i de la etiqueta hasta barrer todos los objetos obteniéndose de este modo las áreas de la intersección y la unión para el total de objetos de la imagen de referencia. En los anexos de este trabajo aparece recogido el programa de la implementación del cálculo de estos coeficientes, formando a su vez parte de los programas preparados para los experimentos propuestos. 2.5.2. Implementación de la distancia de Vinet. Para el cálculo de las distancia de Vinet utilizada en [34] se emplea la función vinet. La misma devuelve la medida de desigualdad que existe entre dos imágenes, por tanto entre más pequeña es la distancia el resultado de la segmentación será más exacto. La función tiene como argumentos las imágenes a comparar y el tipo de asignación, las imágenes tienen que estar etiquetadas para el correcto cálculo de la distancia, mientras la asignación es por defecto 1 pero puede adquirir valor 2 si se desea realizar el método por el algoritmo húngaro. 2.6. Pasos adicionales en el proceso de segmentación. Debido a la forma que presentan los eritrocitos, de ser células que no tienen núcleo cuando maduran y con una depresión en el centro, al aplicarse los algoritmos de segmentación se evidencia en algunos casos la presencia de “huecos” en el centro de las células, los cuales se rellenan mediante la función imfill de MATLAB. En esta función un “hueco” se analiza como un conjunto de píxeles del fondo que no pueden ser alcanzados si se rellena el fondo a partir de los bordes de la imagen. Después se procede a eliminan las células que tocan los bordes con la función de MATLAB imclearborder, basado en que estas células no aportan una información morfológica tan completa como se pudiera desear, ya que las mismas aparecen recortadas en alguna medida. Las funciones imfill e imclearborder están incluidas en las funciones utilizadas para los diferentes métodos de segmentación. En las imágenes pueden aparecer, luego de realizar la segmentación, de rellenar los “huecos” y eliminar las células que tocan los bordes, elementos de pequeño tamaño que no.
(42) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 30. forman parte de la estructura celular y que constituyen artefactos o ruido. Para eliminarlos, se desarrollaron los pasos siguientes: 1. Se descompone la máscara de la imagen correspondiente, en regiones conectadas etiquetadas con función bwlabel de MATLAB. 2. Se calcula mediante la función de MATLAB regionprops el área de cada componente conectada y etiquetada, de cada imagen. 3. Se construye un histograma con las áreas de todas las imágenes seleccionadas, donde se determina un umbral global a partir del cual se van a eliminar los elementos en la imagen. La selección del umbral global (α) está basada en el análisis del histograma donde el primer máximo corresponde fundamentalmente a los artefactos presentes en la imagen. Apoyado en esto, se tomó de forma experimental como umbral global el primer mínimo inmediato posterior al primer máximo. 4. Se le aplica la función bwareaopen, con el umbral (α) determinado anteriormente, a la máscara a la cual se le desea eliminar los artefactos de área menor que el umbral. Con este procedimiento se obtienen resultados satisfactorios, los cuales se muestran y se comentan en el capítulo 3. 2.7. Método estadístico. Para realizar la validación del análisis estadístico se empleó el software SPSS-15, utilizado dentro de éste, la prueba no paramétrica de Friedman. La misma es el equivalente no paramétrico de un diseño de medidas repetidas para una muestra o un análisis de varianza de dos factores con una observación por casilla. Friedman contrasta la hipótesis nula de que las k variables relacionadas procedan de la misma población. En cada caso, las k variables se ordenan en un rango de 1 a k. El estadístico de contraste se basa en estos rangos. Se escoge precisamente una prueba no paramétrica ya que en ellas no se necesita suponer que la distribución de los datos sea gaussiana y porque el conjunto de datos es pequeño..
(43) CAPÍTULO 2. SEGMENTACIÓN DE IMÁGENES SINTÉTICAS. 2.8. 31. Conclusiones del capítulo 2. Es posible realizar una implementación efectiva en MATLAB de los métodos de segmentación representativos a emplear en este trabajo: k-medias, algoritmo de Otsu, algoritmo con la transformada watershed y conjuntos de nivel. Para realizar la evaluación comparativa de los métodos de segmentación se fundamentó el uso de la prueba no paramétrica de Friedman, aplicada a los coeficientes de Dice y Jaccard y la distancia de Vinet, así como a los tiempos de ejecución de los programas..
(44) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 32. CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 3.1. Introducción. Este capítulo está formado por cinco epígrafes donde aparecen los resultados obtenidos en el trabajo. Se abordan brevemente los resultados del proceso de segmentación mediante los algoritmos de k-medias, Otsu, transformada watershed y conjuntos de nivel, implementados en MATLAB. También se realiza un análisis comparativo y estadístico de los resultados obtenidos. 3.2. Resultados obtenidos en el proceso de segmentación eliminando los objetos que tocan los bordes en las imágenes. Para cada una de las imágenes seleccionadas los métodos de segmentación utilizados arrojan diferentes resultados a partir de cuyo análisis se determinará cuál método de segmentación resultó ser el más eficiente en los experimentos realizados. No hay un método de segmentación absoluto porque para otras imágenes los resultados pueden ser diferentes. Para emplear los métodos de segmentación se realiza la eliminación de los objetos que tocan los bordes en las imágenes, con el objetivo de evaluar solamente los objetos que presentan su área total en la imagen. 3.2.1. Resultados de la segmentación aplicando el método de k-medias. Los resultados obtenidos del proceso de segmentación aplicando el algoritmo k-medias fueron satisfactorios en las imágenes sintéticas de hematología celular, puesto que sigue fielmente el contorno de la célula, en la figura 3.1 se pueden apreciar los resultados..
(45) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 33. Figura 3.1 Resultado de la Segmentación aplicando el método de k-medias. En ocasiones producto de la eliminación de bordes hubo células que debieron estar presente en el resultado de la segmentación y al omitir los bordes desaparecen, este es el caso de las células que se encuentran encerradas en un rectángulo. Este problema será ampliado en un epígrafe posterior con más profundidad. 3.2.2. Resultados de la segmentación aplicando el algoritmo de Otsu. La segmentación por el método de Otsu, utilizando la imagen de intensidad en el espacio de color RGB, en imágenes sintéticas de hematología celular ofrece buenos resultados incluso cuando la calidad de las imágenes es baja, como los mostrados en la figura 3.2.. Figura 3.2 Resultado de la segmentación de Otsu.
Figure



+7




Documento similar
Esta investigación tuvo como objetivo principal resolver el problema de la segmentación de imágenes a través del uso del algoritmo de agrupación basados en la ley de
algoritmos de segmentación para la determinación de áreas contaminadas por petróleo y aceites de motor quemados. Disponer de sistemas automáticos análisis de
En este trabajo se presentó un método para la segmentación de estructuras contenidas en imágenes digitales 3D, el cual se basa en la combinación de un algoritmo de crecimiento
Imagen SRL2_S4 En la figura 13 se observa que los algoritmos FCM y parámetro regiones=9, PCM y parámetro regiones=8 y Sub-segmentación mediante PFCM parámetro α=0.1 aplicados a
El tiempo utilizado por el algoritmo para realizar la segmentación sobre el conjunto de imágenes para cada valor de σ es monótonamente decreciente como se muestra en la Figu-.
Imagen original superior izquierda comparada con las imágenes obtenidas por el algoritmo de Barnsley superior derecha y los algoritmos genéticos con cromosomas diploides en la
Los algoritmos de segmentación de imágenes mono- cromáticas generalmente se basan en una de las dos propiedades básicas de los valores del nivel de gris: discontinuidad y
De las 199 imágenes, el número de imágenes originales bien segmentadas (BSo) y mal segmentadas (MSo), utilizando el algoritmo de segmentación de Masek sin aplicar
