Control de seguimiento de trayectoria en espacio cartesiano para robot paralelo con 2 GDL
71
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Control de seguimiento de trayectoria en espacio cartesiano para robot paralelo con 2 GDL Autor: Guillermo Peláez Iglesias Email: [email protected]. Tutor: Ms.C. Orlando Urquijo Pascual Prof. Auxiliar, Dpto. Automática, Fac. Ingeniería Eléctrica, UCLV. Email: [email protected]. Santa Clara 2017 "Año 59 de la Revolución".
(3) i. Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) ii. PENSAMIENTO. Una máquina puede hacer el trabajo de 50 hombres corrientes. Pero no existe ninguna máquina que pueda hacer el trabajo de un hombre extraordinario. Franklin Delano Roosevelt.
(5) iii. DEDICATORIA. A mi mamá y a mi papá por haberme regalado lo más preciado, la vida; además por estar siempre dispuestos a brindarme su apoyo para que saliera adelante, a Grisbey y a Pipito unos suegros increíbles que depositaron en mí la confianza necesaria durante todo este tiempo, a mi novia Lilibey por su amor y comprensión, a mi familia por el apoyo brindado, a mis amigos de la universidad por ayudarme cuando más lo necesité. En fin, dedico este trabajo a todos los que de una forma u otra han influido de manera positiva en mi formación profesional..
(6) iv. AGRADECIMIENTOS. A mi tutor Urquijo por su colaboración, paciencia y apoyo incondicional en la elaboración de este trabajo que constituye el esfuerzo de cinco años, a Izaguirre que me sirvió de guía cuando lo necesité, a Valeriano por leer los trabajos previos hechos hasta la predefensa y darme una visión más acorde a la investigación, al colectivo de profesores de la carrera, a mi novia Lilibey que dejó de hacer muchísimos proyectos referidos a su especialidad por tal que usara su laptop y a todos, muchísimas gracias..
(7) v. RESUMEN. El desarrollo de esquemas de control de movimiento de robots paralelos es un tema de gran interés en la comunidad científica internacional. Aspectos importantes como el modelado y la simulación constituyen hoy día problemas abiertos. En este contexto, el trabajo aquí expuesto consiste en un esquema de control de seguimiento de trayectoria en espacio cartesiano con realimentación de la velocidad, aplicado a un robot paralelo de dos grados de libertad, accionado por cilindros neumáticos, en aplicación de simulador industrial de movimiento. En tal sentido, la propuesta se basa en un esquema de control cinemático en espacio de tareas que prescinde del cálculo del modelo dinámico del robot, además, esta depende en su totalidad de la obtención del modelo referente a la cinemática diferencial. Para validar la propuesta se realizan experimentos utilizando softwares de simulación con el robot caso de estudio, las cuales demuestran la efectividad de la estrategia de control planteada..
(8) vi. TABLA DE CONTENIDOS. PENSAMIENTO ................................................................................................................... ii DEDICATORIA ................................................................................................................... iii AGRADECIMIENTOS .........................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1. 1.1. MODELADO Y CONTROL DE ROBOTS PARALELOS ..................... 6. Robótica paralela ...................................................................................................... 6. 1.1.1. Conceptualización de robots paralelo ............................................................... 6. 1.1.2. Configuraciones estructurales de los robots paralelos ...................................... 7. 1.1.3. Aplicaciones...................................................................................................... 8. 1.1.4. Breve historia de la robótica paralela ............................................................... 9. 1.2. Modelado de los robots paralelos ........................................................................... 10. 1.2.1. Modelado cinemático inverso ......................................................................... 11. 1.2.2. Modelado cinemático directo.......................................................................... 12. 1.2.3. Cinemática diferencial .................................................................................... 14. 1.2.4. Modelado dinámico de los robots paralelos ................................................... 16. 1.3. Estrategias de control de seguimiento de trayectoria en espacio de tareas ............ 17. 1.4. Conclusiones parciales ........................................................................................... 24.
(9) vii CAPÍTULO 2.. MODELADO DEL ROBOT PARALELO DE 2 GDL .......................... 26. 2.1. Descripción de la plataforma de dos grados de libertad ........................................ 26. 2.2. Modelado de la plataforma de 2 GDL.................................................................... 28. 2.2.1. Modelado cinemático inverso ......................................................................... 28. 2.2.2. Modelado cinemático directo.......................................................................... 31. 2.2.3. Cinemática diferencial .................................................................................... 33. 2.2.4. Modelado no lineal de los actuadores neumáticos.......................................... 35. 2.2.5. Obtención del modelo electro-neumático a través de identificación. experimental.................................................................................................................. 37 2.3. Conclusiones parciales ........................................................................................... 40. CAPÍTULO 3.. ESQUEMA DE CONTROL DE SEGUIMIENTO DE TRAYECTORIA. EN ESPACIO CARTESIANO PARA UN ROBOT PARALELO DE 2 GDL .................... 41 3.1. Esquema de control de seguimiento de trayectoria con realimentación de la. velocidad ........................................................................................................................... 41 3.1.1 3.2. Resultados de la simulación ............................................................................ 42. Lazo de control articular ........................................................................................ 43. 3.2.1. Sintonía del regulador en el espacio cartesiano .............................................. 45. 3.3. Análisis económico ................................................................................................ 51. 3.4. Conclusiones del capítulo ...................................................................................... 51. CONCLUSIONES Y RECOMENDACIONES ................................................................... 53 Conclusiones ..................................................................................................................... 53 Recomendaciones ............................................................................................................. 54 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 55 ANEXOS .............................................................................................................................. 60.
(10) viii Anexo I Control de seguimiento de trayectoria en espacio cartesiano con realimentación de la velocidad .................................................................................................................. 60 Anexo II. Programa en MATLAB para la jacobiana directa e inversa ....................... 61.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. La robótica paralela es la rama de la ciencia que se encarga del estudio de robots cuya estructura mecánica, que enlaza la base fija con el elemento terminal, está compuesta por dos o más cadenas cinemáticas cerradas (Merlet, 2012). Estos sistemas son empleados en aplicaciones tales como son: simuladores de movimiento (Castellanos y otros, 2011), para el posicionamiento de dispositivos pesados, como antenas, radares y telescopios (Zabalza y Ros, 2007), para máquinas herramientas (Silva y otros, 2009), aplicaciones navales (Yeh y otros, 2009), simuladores de vuelo (Cardona, 2015), cirugía médica y rehabilitación (Dutta, 2012), entre otras. Entre las ventajas que presentan este tipo de estructura robótica se encuentran la alta exactitud de posicionamiento, mayor rigidez en su estructura mecánica dado que comparten la carga entre todas sus extremidades, así como alta relación peso-carga, gran velocidad de movimiento y buena repetitividad (Wang y Pi, 2013). No obstante, el estudio de estos sistemas trae consigo complicaciones en cuanto a: las limitaciones en el espacio de trabajo, la presencia de singularidades de su estructura mecánica, que dificulta la obtención de los modelos cinemáticos y dinámicos (Muller, 2008) y, por ende, aumenta la complejidad para el diseño de los controladores. Al trabajar con estructuras paralelas accionadas por cilindros neumáticos, los diseñadores se enfrentan al desafío de diseñar sistemas de control para procesos multivariables, de arquitecturas cinemáticas complejas, complicados modelos dinámicos altamente no lineales y de alta interacción, gran integración sensorial y exigentes especificaciones para los lazos de control (Nalluri y Mallikarjuna, 2009), por lo que el control de seguimiento de trayectoria de estos sistemas se convierte en un reto para la comunidad científica internacional..
(12) INTRODUCCIÓN. 2. El control de seguimiento de trayectoria consiste en seguir una trayectoria dada en el tiempo 𝑞𝑑 (𝑡) 𝑜 𝑥𝑑 (𝑡) y sus sucesivas derivadas 𝑞̇ 𝑑 (𝑡) 𝑜 𝑥̇ 𝑑 (𝑡)𝑦 𝑞̈ 𝑑 (𝑡) 𝑜 𝑥̈ 𝑑 (𝑡), las cuales describen la velocidad y aceleración deseadas respectivamente (Siciliano y Khatib, 2008). La trayectoria deseada en la robótica se puede describir como la pose deseada de las coordenadas cartesianas del efector final del robot respecto a la base fija (Hu y otros, 2012). El movimiento del robot puede ser controlado realimentando la posición y velocidad, ya sea en el espacio articular como en el espacio de tareas. El control de seguimiento de trayectoria en el espacio articular requiere la solución de la cinemática inversa para convertir la trayectoria deseada del robot en el espacio de tareas en las elongaciones correspondientes de cada articulación actuada, y presenta algunas limitaciones en cuanto a la compensación de las incertidumbres del sistema (Xian y otros, 2004). Por su parte, el control de seguimiento de trayectoria en el espacio de tareas, tiene la capacidad de compensar estas incertidumbres, aunque necesita la medición directa de las variables cartesianas del robot (Stefanovic, 2012), lo cual resulta muy costoso limitando el uso de estas estrategias en robots manipuladores industriales (Nazari y otros, 2014). El objetivo del control de seguimiento en el espacio de tareas es garantizar el movimiento del efector final de manera que siga la señal deseada tan fielmente como sea posible, donde el error regulado es el existente entre la pose real y la deseada de la plataforma móvil, garantizándose un mejor desempeño del robot, sobre todo cuando las especificaciones son dadas en el espacio cartesiano (Yen y Lai, 2009). El control de seguimiento de trayectoria en robots paralelos ha sido implementado utilizando tanto estrategias no lineales como lineales (Wang y Pi, 2013). Paccot en su trabajo demuestra las ventajas del control en el espacio de tareas respecto al articular en robots paralelos, y evalúa estrategias de control PID simples y por par calculado (Paccot y otros, 2009). Por otra parte, Davliakos y Papadopoulos presentan una estrategia de control de seguimiento de posición en espacio de tareas en cascada con un lazo de control de seguimiento de fuerza basado en modelo, que es ampliada con una acción PD que es la encargada de que el error de seguimiento de trayectoria converja a cero de manera exponencial (Davliakos y Papadopoulos, 2007). Bellakenal propone un sistema de control cartesiano con evaluación de la cinemática directa y una variante para evitar la misma empleando un sistema sensorial basado en imagen garantizando el control de la posición y.
(13) INTRODUCCIÓN. 3. de sus sucesivas derivadas (Bellakenal y otros, 2011). En el trabajo de Ider y Korkmaz se presenta un esquema de seguimiento de trayectoria de los manipuladores paralelos dirigido a la presencia de la flexibilidad en las unidades de articulación. La ley de control propuesta desacopla y linealiza el sistema y logra estabilidad asintótica por realimentación de las posiciones y velocidades de las articulaciones y rotores accionados (Ider y Korkmaz, 2009). En una gran cantidad de aplicaciones de simuladores de conducción, el control de seguimiento de trayectoria deseada en el espacio de tareas es de vital importancia para el desempeño del sistema (Zhao y otros, 2010). Como parte de las investigaciones realizadas por el grupo de investigación GARP se han llevado a cabo varias investigaciones con el objetivo de mejorar el desempeño de los robots paralelos en aplicaciones de seguimiento de trayectoria. En (Izaguirre y otros, 2011c), se propone un esquema de control cartesiano con la utilización de un doble lazo en cascada que no cumplía con los requerimientos de seguimiento de trayectoria en una plataforma de tres grados de libertad. Para dar solución a este problema en (Urquijo, 2014) se propone una solución basada en (Slotine y Li, 1989), que ya resolvía los problemas de seguimiento de trayectoria en la plataforma de tres grados de libertad, aunque sin la realimentación de la velocidad del efector final, lo cual entra en contradicción con el concepto de seguimiento de trayectoria. Situación del problema No se cuenta con una estrategia de control en espacio cartesiano para el robot paralelo de 2 GDL que garantice un control de seguimiento de trayectoria con realimentación de la velocidad de la plataforma móvil. Objetivo general Implementar un control de seguimiento de trayectoria con realimentación de la velocidad en espacio cartesiano para robots paralelos con 2 GDL. Objetivos específicos 1.. Analizar tendencias mundiales en cuanto a estrategias de control de seguimiento de trayectoria desarrolladas en robots paralelos con realimentación de velocidad..
(14) INTRODUCCIÓN. 2.. 4. Obtener modelos matemáticos necesarios del robot paralelo de 2GDL para la implementación de la estrategia de control de seguimiento de trayectoria en espacio de tareas.. 3.. Implementar esquema de control cartesiano para el seguimiento de trayectoria con realimentación de la posición y de la velocidad.. 4.. Evaluar el desempeño del esquema de control propuesto mediante simulación utilizando modelo lineal del sistema electro-neumático implementado en SIMULINK.. Tareas investigativas 1.. Análisis de las tendencias mundiales en cuanto a estrategias de control de seguimiento de trayectoria en espacio de tarea con realimentación de velocidad para el robot paralelo de 2GDL.. 2.. Obtención del modelo del sistema electro-neumático de la plataforma de 2 GDL a través de identificación experimental.. 3.. Descripción del modelo cinemático inverso y directo para la estimación del posicionamiento articular y cartesiano respectivamente de la plataforma de 2 GDL.. 4.. Obtención de los modelos Jacobianos para la estimación de la velocidad del efector final de la plataforma de 2 GDL y las velocidades articulares de cada uno de los pistones de la plataforma neumática.. 5.. Implementación de un esquema de control cartesiano para el seguimiento de trayectoria con realimentación de la posición y de la velocidad.. 6.. Evaluación del desempeño del esquema de control propuesto utilizando modelo lineal del sistema electro-neumático implementado en SIMULINK.. Organización del informe El informe está conformado por una introducción, el desarrollo organizado en tres capítulos, seguido de las conclusiones, recomendaciones y las referencias bibliográficas. Capítulo 1: Se exponen los principales aspectos teóricos relacionados con la robótica paralela. Se abordan además las principales técnicas de modelado de los sistemas electroneumáticos y las estructuras robóticas paralelas. Por último, se hace un análisis crítico de.
(15) INTRODUCCIÓN. 5. las principales estrategias de control de seguimiento de trayectoria utilizadas aplicadas a sistemas robóticos en general. Capítulo 2: Se realiza una descripción de la plataforma de 2 GDL. Se abordan las principales técnicas de modelado de la plataforma de 2 GDL SIMPRO utilizado como caso de estudio y se describe el proceso de identificación experimental para la obtención del modelo electro-neumático. Capítulo 3: Se plantea el esquema de control de seguimiento de trayectoria con la realimentación de la velocidad y se evalúa en SIMULINK la veracidad del mismo y de los bloques referentes a la cinemática diferencial. También se realiza una descripción del lazo de control articular para la obtención del controlador y, por último, se hace la sintonía del regulador externo del lazo cartesiano..
(16) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 6. CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. En este capítulo se abordan los principales conceptos acerca de la robótica paralela y se incursiona en aspectos de modelado y control de los sistemas electro-neumáticos utilizados para el accionamiento de estas estructuras. También se incluyen aspectos de las técnicas de modelado para los robots paralelos y se reflejan algunas de las estrategias de control más utilizadas para el control de seguimiento de trayectoria en estos dispositivos mecánicos. 1.1. Robótica paralela. En el presente epígrafe se abordarán los principales aspectos teóricos relacionados con la robótica paralela, haciendo énfasis en el modelado de estas estructuras robóticas y en las diferentes variantes de control de seguimiento de trayectoria publicadas en la literatura especializada. 1.1.1. Conceptualización de robots paralelo. Se puede definir a un manipulador paralelo o máquina cinemática paralela genérica como un mecanismo de cadena cinemática cerrada en el que su efector final está unido a la base por varias cadenas cinemáticas independientes (Merlet, 2012). Hay un caso particular de manipulador paralelo genérico que reúne las siguientes características: 1. Posee un mínimo de dos cadenas cinemáticas que permiten una adecuada distribución de la carga. 2. El número de actuadores es mínimo. 3. El número de sensores necesarios para el control del mecanismo en lazo cerrado es también mínimo..
(17) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 7. 4. Cuando los actuadores están bloqueados el manipulador permanece en la posición anterior al bloqueo. Al manipulador paralelo genérico que reúne las características anteriores se le denomina robot paralelo (Merlet, 2012) y lo define como aquel manipulador que está constituido por un efector final con n grados de libertad y una base fija, unidos por al menos dos cadenas cinemáticas independientes, en el que el movimiento se produce a través de n actuadores independientes. Las cadenas cinemáticas simples son aquellas en las cuales cada miembro posee un grado de conexión (para cada elemento de enlace de un manipulador, el grado de conexión es el número de cuerpos rígidos conectados a dicho elemento de enlace a través de una articulación) que es menor o igual que dos; mientras que las cadenas cinemáticas cerradas se obtienen cuando cualquiera de los elementos de enlace, excepto la base, posee un grado de conexión mayor o igual que tres (Merlet, 2012). Según (Barrientos y Penin, 1997), cada uno de los movimientos que puede realizar cada articulación con respecto a la anterior, se denomina grado de libertad (GDL). El número de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen. 1.1.2. Configuraciones estructurales de los robots paralelos. Dependiendo de las prestaciones requeridas en los distintos campos de aplicación, existen muchas estructuras mecánicas en las que se basa el funcionamiento de los robots paralelos. La topología o arquitectura de un mecanismo paralelo se establece como las articulaciones, conexiones, acoplamientos y actuadores que están estructurados para lograr un determinado movimiento (Merlet, 2012). Las configuraciones estructurales de los robots paralelos dependen del número de combinaciones de las cadenas cinemáticas que lo componen, del tipo y de las restricciones en el movimiento de las articulaciones, etc. No obstante, Merlet, siendo uno de los autores que más ha profundizado en el estudio del tema, las divide en dos grupos según el movimiento que realizan: los robots planares y los espaciales (Merlet, 2012)..
(18) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 8. Robots planares: Un robot planar posee un efector final con dos o tres grados de libertad, dos traslaciones en el plano y una rotación, en caso de tener tres gados de libertad, sobre un eje perpendicular a dicho plano. En los robots planares de tres grados de libertad, tres cadenas soportan el efector final. Las cadenas se conectan al efector final en tres puntos: generalmente el efector final es un triángulo (Merlet, 2012). Robots espaciales: Los robots espaciales son aquellos que experimentan el movimiento en todo el espacio tridimensional y no en un plano, es decir, se pueden trasladar (posición en el espacio) y girar (orientación en el espacio) en los tres ejes de coordenadas; esto le confiere 3, 4, 5 y 6 grados de libertad, aunque existen algunos casos particulares que sólo poseen dos grados de libertad (Bonev, 2002).. Figura 1.1: Configuraciones estructurales de los robots paralelos. 1.1.3. Aplicaciones. Con el estudio del funcionamiento de los robots paralelos y el aumento de la capacidad de cómputo de los nuevos procesadores, se han desarrollado múltiples aplicaciones de estos manipuladores paralelos. Entre las principales podemos mencionar las aplicaciones industriales como máquinas herramientas y en centros de ensamblaje. En aplicaciones médicas en los que se requiere alta precisión para operaciones en el campo de la oftalmología y neurocirugía, es también extendido su uso aprovechando la exactitud de posicionamiento del elemento terminal. Esta característica es aprovechada en la industria de componentes electrónicos en la fabricación de circuitos integrados y placas electrónicas, debido a la precisión que requiere realizar la soldadura de estos componentes, y también está su uso como simuladores de vuelo y de conducción para el adiestramiento de personal y como medio de recreación..
(19) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 9. Figura 1.2: Aplicaciones de la robótica paralela. 1.1.4. Breve historia de la robótica paralela. El uso de los robots paralelos data del año 1931, cuando James E. Gwinnett patentó el primer mecanismo paralelo del que se tenga conocimiento. Se trataba de una plataforma de movimiento destinada a la industria del entretenimiento diseñada como plataforma rotacional para los teatros (Gwinnett, 1931). Una década más tarde, Willard L.V. Pollard inventó el que se conoce comúnmente como el primer robot industrial y fue precisamente un robot paralelo destinado a pintura con spray (Aracil y Saltarén, 2006). En 1947, V.E. Gough ideó un robot paralelo con seis actuadores lineales formando una estructura de octaedro. Este robot con 6 GDL fue utilizado en la empresa Dunlop para el ensayo de neumáticos de aviación. La estructura fue presentada en un congreso de La Federación Internacional de Sociedades de Ingenieros y Técnicos del Automóvil (FISITA) en 1962. En la actualidad, existen multitud de plataformas basadas en este diseño en numerosas empresas (Zabalza y Ros, 2007). En 1965 D. Stewart presentó en un artículo una plataforma de 6 GDL para ser utilizada como simulador de vuelo. El artículo de Stewart tuvo y tiene una gran influencia en el mundo académico y se considera como uno de los primeros trabajos de análisis de plataformas paralelas (Zabalza y Ros, 2007). En 1967, Klaus L. Cappel desarrolla un simulador de movimiento según la configuración Gough-Stewart, que fue empleado como simulador de helicópteros (Cappel, 1967), siendo.
(20) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 10. los simuladores de movimiento el campo de aplicación donde mayor éxito han cosechado los robots paralelos (Lombaerts y otros, 2011). En tal sentido, se destacan novedosos simuladores de vuelo para entrenamiento de pilotos, los simuladores de vuelo de la NASA (Slob, 2008), el simulador NADS de la Universidad de Iowa (Ahmad y Papelis, 2006), y el TACOM (Reid, 1992). En 1978, K.H. Hunt sugirió que se usaran los mecanismos actuados de forma paralela en los simuladores de vuelo como robots manipuladores, y destacó que los manipuladores paralelos requerían de un estudio más detallado en el contexto de las aplicaciones robóticas a la vista de las ventajas en cuanto a rigidez y precisión respecto a los robots serie convencionales (Aracil y Saltarén, 2006). En 1983, K.H. Hunt presentó un manipulador paralelo de 6 GDL accionado por actuadores giratorios. 1.2. Modelado de los robots paralelos. Una de las desventajas reconocidas de los robots paralelos radica en la dificultad de la resolución de los modelos cinemático y dinámico (Wu y otros, 2008). No obstante, resulta imprescindible su obtención para implementar estrategias de control que dependen de la solución de estos modelos (Chen y otros, 2009). Las expresiones cinemáticas estudian el movimiento del robot con respecto a un sistema de referencia, sin tener en cuenta las fuerzas o pares que lo producen, estableciéndose una relación analítica entre las funciones que representan el movimiento articular y las que describen la pose del elemento terminal en el espacio de trabajo. Cuando es necesario determinar la posición y orientación del elemento terminal con respecto a un sistema de coordenadas, siendo conocidas las variables articulares y los parámetros geométricos del robot, se está en presencia del problema cinemático directo, sin embargo, cuando se quiere determinar el valor de las coordenadas articulares para una configuración conocida que debe adoptar el robot, se define el problema cinemático inverso (Chalbat y Staicu, 2009). Por su parte, el modelo dinámico establece relaciones matemáticas entre las coordenadas cartesianas del elemento terminal, sus derivadas (velocidad y aceleración), las fuerzas y/o pares aplicados a las articulaciones y los parámetros del robot, tales como: masas de los eslabones, inercias, fricción, etc. (Yen y Lai, 2009), estableciéndose de manera directa o inversa la interrelación entre las fuerzas y/o torques que actúan sobre el mecanismo y el movimiento que en él se origina..
(21) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 11. Dada la existencia de cadenas cerradas, la obtención de las expresiones dinámicas en este tipo de robots constituye un procedimiento muy laborioso, siendo difícil obtener muchos de los parámetros involucrados en dichas ecuaciones, aún mediante estimación en línea (Shurong y Shihuan, 2008). 1.2.1. Modelado cinemático inverso. La cinemática inversa permite determinar las variables que definen las coordenadas articulares del robot a partir de conocidas la posición y orientación del elemento terminal en el espacio cartesiano. En el caso de los robots paralelos, dichas expresiones incluyen ecuaciones altamente acopladas, no lineales, cuya solución se complejiza notablemente con el aumento del número de grados de libertad (Cherfia y otros, 2007). Existen dos procedimientos para el planteamiento del problema cinemático inverso en robots paralelos: el método analítico (basado en formulación vectorial) y el método geométrico (basado en formulación algebraica) (Merlet, 2006a). Empleando la formulación vectorial se puede construir un sistema de ecuaciones que contendrá igual número de ecuaciones que de incógnitas, especificando la expresión vectorial cerrada que pasa por los puntos de unión de las cadenas cinemáticas con la base fija (𝐴𝑖 ) y la plataforma móvil (𝐵𝑖 ), e incluyendo los puntos de origen de los sistemas referenciales fijo y móvil, previamente definidos (Rolland, 2005).. Figura 1.3: Representación de la formulación vectorial. Para cada cadena cinemática se puede establecer una función vectorial entre los puntos 𝐴𝑖 y ⃗⃗⃗⃗⃗⃗⃗⃗ =U(X). Entonces, de 𝐵𝑖 expresada en las coordenadas generalizadas (X), tal que 𝐴𝑖𝐵𝑖.
(22) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 12. acuerdo a la Figura 1.3, estableciendo R como la matriz de rotación que define la orientación relativa del sistema de referencia móvil respecto al fijo, se plantea para un robot de n grados de libertad: ⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ - ⃗⃗⃗⃗⃗⃗⃗ 𝐴𝑖𝐵𝑖 =⃗⃗⃗⃗⃗⃗ 𝑂𝑃 + R𝑃𝐵𝑖 𝑂𝐴𝑖 ; 𝑖=1…n. (1.1). Donde se cumple: ⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ 1 ,…,𝑂𝐴 ⃗⃗⃗⃗⃗ 𝑛 ] y 𝑃𝐵𝑖 ⃗⃗⃗⃗⃗⃗⃗ → 𝑃𝐵|𝑅𝑚 = [𝑃𝐵 ⃗⃗⃗⃗⃗ 1,…,𝑃𝐵 ⃗⃗⃗⃗⃗ 𝑛 ] 𝑂𝐴𝑖 → 𝑂𝐴|𝑅𝑓 = [𝑂𝐴. (1.2). Cualquier pose de la plataforma móvil que satisface las restricciones cinemáticas impuestas ⃗⃗⃗⃗⃗⃗⃗ 𝑅𝑓 , por lo que se puede plantear por la estructura del robot, es determinada por el vector 𝑂𝐵𝑖 la ecuación: ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑓 =⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑚 ; 𝑖=1…n 𝑂𝐵𝑖 𝑂𝑃|𝑅𝑓 + R𝑃𝐵𝑖. ( 1.3). El desplazamiento lineal que experimenta cada cadena cinemática puede ser expresado ⃗⃗⃗⃗⃗⃗⃗⃗ , donde 𝐿𝑖 = ||𝐴𝑖𝐵𝑖 ⃗⃗⃗⃗⃗⃗⃗⃗ ||2, expresión que se incorpora a como la dimensión del vector 𝐴𝑖𝐵𝑖 (1.3) para llegar a la ecuación: ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑚 − ⃗⃗⃗⃗⃗⃗⃗ 𝐿𝑖 2 = [||⃗⃗⃗⃗⃗⃗ 𝑂𝑃|𝑅𝑓 + R𝑃𝐵𝑖 𝑂𝐴𝑖|𝑅𝑓 ||2 ]2 ; 𝑖 =1…n. (1.4). Luego, a partir de (1.4), los cuadrados de las longitudes de las cadenas articuladas se pueden definir por la siguiente expresión matricial general: 𝐿𝑖 2 =||𝑂𝐴|𝑅𝑓 ||22+||𝑃𝐵|𝑅𝑓 ||22+2(𝑂𝐴|𝑅𝑓 𝑅(𝑃𝐵|𝑅𝑚 ))𝑂𝑃|𝑅𝑓 +2𝑂𝐴|𝑅𝑓 𝑅(𝑃𝐵|𝑅𝑚 )+||𝑂𝑃|𝑅𝑓 ||22 (1.5) La expresión anterior contiene términos lineales en las coordenadas del punto P, donde los términos cuadráticos pueden desaparecer mediante manipulaciones matemáticas, quedando solamente un sistema de tres ecuaciones lineales de las coordenadas del punto P, al cual se incorpora la matriz de rotación para obtener la solución del mismo cuando el robot presenta movimientos rotacionales (Merlet, 2006a). De esta manera, a partir de conocidas las coordenadas generalizadas del robot, se calcula el vector de coordenadas articulares. 1.2.2. Modelado cinemático directo. El modelo cinemático directo obtiene la posición del elemento terminal a partir de las variables articulares (Lu y otros, 2007). El procedimiento consiste en plantear la expresión.
(23) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 13. (1.5) de manera inversa, obteniéndose de forma genérica un sistema de ecuaciones algebraicas no lineales donde se involucran funciones de las variables espaciales y articulares del robot (Rolland, 2005). Considerando la Figura 1.3 se tiene que ⃗⃗⃗⃗⃗⃗⃗ 𝑂𝐴𝑖|𝑅𝑓 y ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑚 los que describen la geometría de la base y de la plataforma móvil respectivamente, 𝑃𝐵𝑖 ⃗⃗⃗⃗⃗⃗⃗⃗ ||2, que indica las longitudes de las cadenas por lo que la magnitud del vector 𝐿𝑖 = ||𝐴𝑖𝐵𝑖 cinemáticas, se puede expresar como: ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑓 - 𝑂𝐴𝑖 ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑓 ||2=||⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑓 ||2 ⃗⃗⃗⃗⃗⃗⃗ )|𝑅𝑚 - 𝑂𝐴𝑖 𝐿𝑖 = ||𝑂𝐵𝑖 𝑂𝑃|𝑅𝑓 + R(𝑃𝐵𝑖. (1.6). Definiendo tres puntos distintos (𝐵1 , 𝐵2 , 𝐵3) para ubicar la localización de la plataforma ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑓 = [𝑋𝑖 , 𝑌𝑖 , 𝑍𝑖 ] para 𝑖 =1…3. Estableciendo 𝑢1 , 𝑢2 , 𝑢3 como móvil, se cumplirá que 𝑂𝐵𝑖 ejes coordenados del lugar donde articulan dichos puntos, se tiene: ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐵 𝐵. ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐵 𝐵. 1 2 1 3 𝑢1 = ‖𝐵⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ ; 𝑢2 = ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ ; 𝑢3 = 𝑢1 ^𝑢2 𝐵 ‖ 1 2. ‖𝐵1 𝐵3 ‖. (1.7). Dado que la plataforma móvil se considera como un cuerpo rígido que no sufre deformación durante su movimiento, entonces para cualquier punto 𝐵𝑖 que forme parte de la misma, se puede plantear: ⃗⃗⃗⃗⃗⃗⃗⃗ 𝐵1 𝐵𝑖 |𝑅𝑏1 = 𝑎𝐵𝑖 𝑢1 +𝑏𝐵𝑖 𝑢2 +𝑐𝐵𝑖 𝑢3 ; 𝑖=1…n. (1.8). Donde 𝑎𝐵𝑖 ; 𝑏𝐵𝑖 ; 𝑐𝐵𝑖 ; (𝑖=1…n) son parámetros que solamente dependen de la geometría de ⃗⃗⃗⃗⃗⃗⃗ |𝑅𝑚 , por lo tanto: la plataforma, siendo explícitamente deducidos a partir de 𝑃𝐵𝑖 𝐿𝑖 2 =(𝑥𝑖− 𝑂𝐴𝑖𝑥 )2+ (𝑦𝑖− 𝑂𝐴𝑖𝑦 )2 ; 𝑖 =1…3 ⃗⃗⃗⃗⃗ 𝑘 |𝑅𝑓 ||2 ; 𝑖 =4…6 ⃗ 𝑘 |𝑅𝑏1 − 𝑂𝐴 𝐿𝑖 2 = ||𝐵. (1.9) (1.10). Con ello se obtiene un sistema de ecuaciones algebraico que considera tres ecuaciones para las extremidades activas del robot y otras tres en términos de las variables 𝑥𝑖 , 𝑦𝑖 , es decir: 𝐹𝑖 = (𝑥𝑖− 𝑂𝐴𝑖𝑥 )2+ (𝑦𝑖− 𝑂𝐴𝑖𝑦 )2 − 𝐿𝑖 2 ; 𝑖 =1…3. (1.11). ⃗⃗⃗⃗⃗ 𝑘 |𝑅𝑓 ||2 − 𝐿𝑖 2 ; 𝑖 =4…6 ⃗ 𝑘 |𝑅𝑏1 − 𝑂𝐴 𝐶𝑖 = ||𝐵. (1.12). Para solucionar (1.11) y (1.12) es necesario disponer de al menos igual cantidad de ecuaciones que de incógnitas. Para ello se derivan tres expresiones adicionales de.
(24) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 14. restricción a partir del sistema de ecuaciones (1.13), que se obtienen de plantear dos ecuaciones que emplean la norma de los vectores que definen la localización de la plataforma (puntos 𝐵𝑖 ) y una tercera a partir de multiplicaciones entre dichos vectores, por lo que se establece: 2 2 2 2 2 ⃗⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐶7 = (||𝐵 2 𝐵1 |𝑅𝑓 ||2 ) − (𝑥2 − 𝑥1 ) + (𝑦2 − 𝑦1 ) +(𝑧2 − 𝑧1 ) =(||𝐵2 𝐵1 |𝑅𝑓 ||2 ) 2 2 2 2 2 ⃗⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐶8 = (||𝐵 3 𝐵1 |𝑅𝑓 ||2 ) − (𝑥3 − 𝑥1 ) + (𝑦3 − 𝑦1 ) +(𝑧3 − 𝑧1 ) = (||𝐵3 𝐵1 |𝑅𝑓 ||2 ). (1.13). 𝐶7 = (𝑥3 − 𝑥1 )(𝑥2 − 𝑥1 ) + (𝑦3 − 𝑦1 )(𝑦2 − 𝑦1 ) +(𝑧3 − 𝑧1)(𝑧2 − 𝑧1 ) ⃗⃗⃗⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗⃗⃗⃗⃗ =||𝐵 1 𝐵2 |𝑅𝑚 ||^||𝐵1 𝐵2 |𝑅𝑚 || El último sistema de ecuaciones se desarrolla a partir de las siguientes combinaciones de funciones: 𝐹7 =−𝐶7 +𝐹1 +𝐹2. (1.14). 𝐹8 =−𝐶8 +𝐹1 +𝐹3. (1.15). 𝐹9 =2𝐶9 +𝐹7 +𝐹8 − 2𝐹1. (1.16). Para el caso analizado, donde se ha definido la localización de la plataforma móvil por los puntos 𝐵1 , 𝐵2 , 𝐵3 (modelo de tres puntos), se obtiene un sistema de nueve ecuaciones con nueve incógnitas, formado por seis ecuaciones cuadráticas y tres cuárticas (Rolland, 2007). La cinemática directa en robots paralelos se enfoca a la obtención de un sistema complejo de ecuaciones polinómicas, difícil de manipular de manera analítica, por lo que requiere procedimientos numéricos para su solución, donde desafortunadamente no existe una solución única cerrada (Sung-Hua y otros, 2008). 1.2.3. Cinemática diferencial. Debido a la existencia de múltiples cadenas cerradas en robots paralelos, el análisis de la cinemática diferencial se convierte en un problema de mucho mayor complejidad que en los robots serie (Zhiyong y Ghorbel, 2006), sin embargo, varios investigadores han estudiado a profundidad la matriz Jacobiana con el objetivo de analizar las singularidades (Di-Gregorio, 2009), manipulabilidad (Merlet, 2006a), dexteridad (Guo y otros, 2008),.
(25) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 15. índices de comportamiento (Sadjadian y Taghirad, 2006), y otras tantas importantes propiedades cinemáticas asociadas a este tipo de robots (Nawratil, 2009). Lung-Wen Tsai (1945-2002) fue uno de los primeros autores que sugirió para los robots paralelos la separación de la matriz Jacobiana en dos matrices, una asociada a la cinemática inversa y otra a la directa (Tsai, 2000). Para un robot no redundante (donde el número de grados de libertad (n) coincide con la cantidad de actuadores), las restricciones cinemáticas impuestas por la estructura paralela pueden ser expresadas matemáticamente por la igualdad (1.17), siendo Ɵ una función implícita n-dimensional del vector de variables espaciales (x) y articulares (q) del robot. Ɵ(x,q) = 0. (1.17). Diferenciando (1.17) con respecto al tiempo, se encuentra la relación entre la razón de cambio de las coordenadas articulares y las velocidades del elemento terminal en el espacio cartesiano. 𝐷𝑥 Ɵ(x,q)ẋ + 𝐷𝑞 Ɵ(x,q)q̇ = 0 ∀ q ∈ 𝑅 𝑛 ; x ∈ 𝑅 𝑛. (1.18). Donde 𝐷𝑥 y 𝐷𝑞 son las matrices de orden n x n que representan el operador diferencial mapeado en los espacios coordenados cartesiano y articular respectivamente. Por lo tanto, se cumple: 𝜕𝜃 𝑑𝑥 𝜕𝑥. 𝜕𝜃 𝑑𝑞. ( 𝑑𝑡 ) = 𝜕𝑞 ( 𝑑𝑡 ) → 𝐽𝑥 𝑥̇ = 𝐽𝑞 𝑞̇. Siendo: 𝜕Ɵ. 𝐽𝑥 = 𝜕𝑥 𝐽𝑞 = −. (1.19) 𝜕Ɵ 𝜕𝑞. (1.20). La existencia de dos matrices Jacobianas separadas, las que se representan en las ecuaciones (1.19) y (1.20), resulta de gran utilidad a la hora de efectuar el análisis de configuraciones singulares para robots paralelos. Dentro de este contexto se establecen tres tipos de singularidades, a saber, las singularidades de la cinemática inversa cuando det(𝐽𝑞 ) = 0; las singularidades de la cinemática directa cuando det(𝐽𝑥 ) = 0; y la denominada singularidad combinada cuando ambos determinantes son cero (Li y Xu, 2006)..
(26) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 16. Entonces, la matriz Jacobiana convencional denotada por J puede ser escrita como: 𝜕q. q̇ = 𝐽ẋ ; siendo: 𝐽𝑖𝑗 = 𝜕x 𝑖. (1.21). 𝑗. Cumpliéndose: 𝐽 = 𝐽𝑞−1 𝐽𝑥 La Jacobiana (1.21) relaciona la velocidad espacial del elemento terminal (ẋ ∈ 𝑅 𝑛 ) con la razón de cambio de las coordenadas articulares actuadas del robot. Es de notar que para los robots paralelos muchos autores prefieren emplear la notación inversa establecida para los 𝜕x. tipos serie (donde: q̇ = 𝐽ẋ ; 𝐽𝑖𝑗 = 𝜕q𝑖 ), dada la diferencia existente entre el problema 𝑗. cinemático directo e inverso en ambos tipos de robots (Sokolov y Xirouchakis, 2007). 1.2.4. Modelado dinámico de los robots paralelos. En ausencia de fuerzas de fricción y otros disturbios dinámicos, la forma generalizada de representar el modelo dinámico de un robot de n grados de libertad (Zhao y Gao, 2009) en el espacio articular es: ῖ =M(q)q̈ + 𝐶(𝑞, q̇)q̇ +G(q). (1.22). donde: M(q): Matriz de inercia (n × n). 𝐶(𝑞, q̇): Matriz de fuerzas de Coriolis y Centrífugas (n × 1). G(q): Vector de fuerzas gravitacionales (n × 1). q: Vector de coordenadas articulares (n × 1). ῖ: Vector de fuerzas o pares articulares aplicados (n × 1). Entre las formulaciones más empleadas para la obtención de estos modelos se encuentran el método de Newton-Euler, la Formulación Lagrangiana, las Ecuaciones de Gibbs –Appell y el Principio del Trabajo Virtual. Todos estos métodos implican desarrollos muy laboriosos para la obtención de estos modelos, además que los mismos requieren un elevado tiempo de cómputo, característica que se convierte en desventaja para la implementación de estrategias de control que requieran su uso en tiempo real (Izaguirre, 2012)..
(27) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 17. Por este motivo es recomendable evitar el desarrollo analítico de estas expresiones dinámicas, y en su lugar, se recomienda el uso de paquetes de software que faciliten la descripción del comportamiento dinámico del sistema en su conjunto (Li y otros, 2009). 1.3. Estrategias de control de seguimiento de trayectoria en espacio de tareas. En aplicaciones de seguimiento de trayectoria, el manipulador se mueve a través de un camino trazado en el espacio para realizar una tarea determinada según la aplicación. Este camino es generalmente especificado en el espacio cartesiano en términos de trayectoria deseada del efector final, mientras que las acciones de control son realizadas en el espacio articular. Esto conlleva a dos tipos de esquemas de control de seguimiento de trayectoria, uno en el espacio cartesiano y otro en el espacio articular (Siciliano y Khatib, 2008). El control de seguimiento de trayectoria está dividido en 3 puntos esenciales (Kelly y otros, 2005): . Planificación del trayecto. . Generación de trayectorias. . Diseño del control. El control de seguimiento de trayectoria, ya sea en el espacio de tareas como en el articular, consiste en seguir una trayectoria dada en el tiempo 𝑞𝑑 (𝑡) 𝑜 𝑥𝑑 (𝑡) y sus sucesivas derivadas 𝑞̇ 𝑑 (𝑡) 𝑜 𝑥̇ 𝑑 (𝑡)𝑦 𝑞̈ 𝑑 (𝑡) 𝑜 𝑥̈ 𝑑 (𝑡), las cuales describen la velocidad y aceleración deseadas respectivamente (Siciliano y Khatib, 2008). Para un movimiento simple de un robot se puede utilizar una función polinomial como la que se define por la ecuación (1.23), en donde se demuestra que la referencia de velocidad y aceleración deseada en el bloque de generación de trayectoria se puede definir como la primera y segunda derivada respectivamente (Siciliano y Khatib, 2008). 𝑦(𝑡) = 𝑎 + 𝑏𝑡 + 𝑐𝑡 2 + 𝑑𝑡 3 𝑦̇ (𝑡) = 𝑏 + 2𝑐𝑡 + 3𝑑𝑡 2. (1.23). 𝑦̈ (𝑡) = 2𝑐 + 6𝑑𝑡 Otros autores (Hu y otros, 2012), definen que la trayectoria deseada en la robótica se puede describir como la pose deseada de las coordenadas cartesianas del efector final del robot.
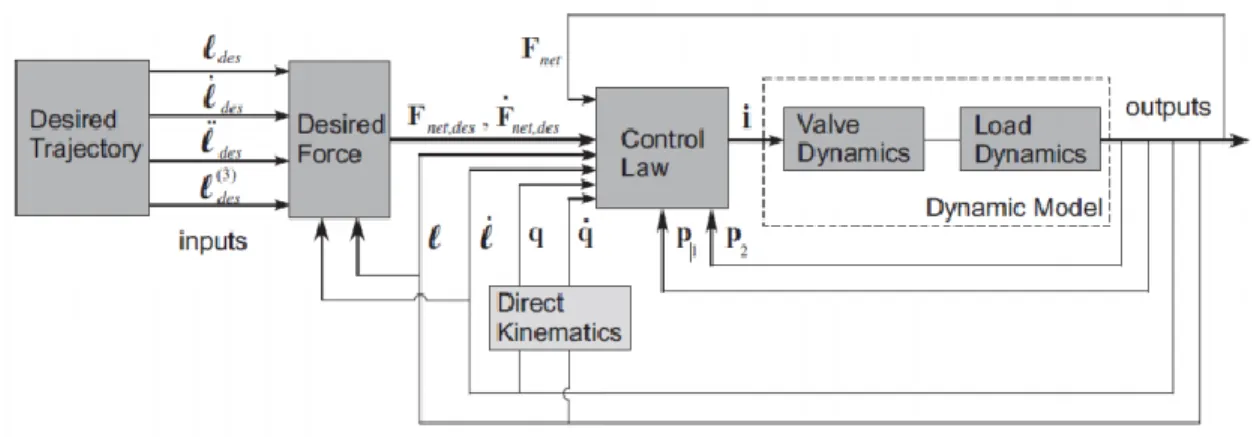
(28) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 18. respecto a la base fija. El movimiento del robot puede ser controlado realimentando la posición y velocidad, ya sea en el espacio articular como en el espacio de tareas. Una gran cantidad de estrategias de control, lineales y no lineales, han sido reportadas en la literatura en los últimos años, con el uso de modelo dinámico inverso, técnicas de linealización de la realimentación, entre otras. En sus trabajos el francés Flavien Paccot demuestra las ventajas del control en el espacio de tareas respecto al articular en robots paralelos y evalúa estrategias de control de seguimiento con control PID simple (figura 1.4-a) y por par calculado (figura 1.4-b), considerando siempre disponible la información de posicionamiento y velocidad de la plataforma móvil, por lo que no propone variantes de sistema sensorial, aun reconociendo la dificultad que implica la medida directa de la ubicación del elemento terminal del robot (Paccot y otros, 2009). En este control se podrían esperar buenos resultados si se contara con un buen modelo dinámico y una buena identificación dinámica, además de un buen algoritmo para las transformaciones numéricas restantes (Paccot y otros, 2009).. Figura 1.4: Control cartesiano considerando disponible la pose de la plataforma móvil. En este caso se presenta una estrategia de control de seguimiento de la posición en espacio de tareas en cascada con un lazo de control de seguimiento de fuerza basado en modelo, que es ampliada con una acción PD que es la encargada de que el error de seguimiento a la trayectoria deseada converja a cero de manera exponencial (Davliakos y Papadopoulos, 2007). Esta estrategia tiene como característica que el lazo interno de fuerza es más rápido que el lazo externo de posición. Tiene como ventaja que no es necesario la estimación de la aceleración de la derivada de la fuerza deseada, lo cual constituye un problema por la aparición de ruido en el sistema de control. Esta estrategia utiliza la solución del modelo dinámico inverso del sistema para describir el movimiento de la plataforma móvil y la.
(29) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 19. acción del sistema hidráulico. Además, las variables de posición y velocidad son obtenidas a partir de la solución de la cinemática directa. El esquema de control de esta estrategia se muestra en la Figura 1.5. Las simulaciones arrojaron buenos resultados en el control de seguimiento ante una trayectoria deseada en el espacio de tareas.. Figura 1.5: Estrategia de control de seguimiento de posición en espacio de tareas en cascada con un lazo de control de seguimiento de fuerza basado en modelo. Jean Jacques Slotine (Slotine and Li, 1989), en su libro “Applied Nonlinear Control”, presenta una estrategia de control donde la parte feedforward es usada para cancelar el efecto de las perturbaciones conocidas proveyendo una acción anticipativa, por lo que resulta de gran ayuda para realizar control de seguimiento de trayectoria en un robot paralelo dado su alto carácter no lineal. Para realizar una compensación feedforward siempre se requiere el modelo de la planta, aunque en muchos casos no necesita ser un modelo tan exacto. La calidad del desempeño del sistema de control dependerá en gran medida de la exactitud del modelo estimado. Luego el término feedforward se calcula invirtiendo el modelo de la planta y será responsable de reducir y eliminar el error de seguimiento. El problema de implementar este control radica en el hecho de que en la mayoría de los casos el modelo inverso de la planta será un sistema con más ceros que polos, o sea, un sistema irrealizable físicamente. Se demuestra que la configuración propuesta por Slotine (Figura 1.6) permite un seguimiento perfecto la salida respecto a la referencia, 𝑦𝑑 = 𝑦. Esta configuración presenta la desventaja de que no puede ser utilizada directamente para resolver problemas de seguimiento de trayectoria en sistemas de fase no mínima, que presentan ceros positivos, ya que el inverso del modelo sería inestable. En esta.
(30) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 20. solución se logran alcanzar buenos resultados de control de seguimiento de una trayectoria deseada sin la necesidad de la realimentación de la velocidad y aceleración de la salida.. Figura 1.6: Estrategia de control de seguimiento de trayectoria generalizada. Por su parte, S. Bellakehal propone un sistema de control cartesiano con evaluación de la cinemática directa (Figura 1.7-a) y una variante para evitar la misma empleando sistema sensorial basado en imagen (Figura 1.7-b), pero incorpora en el lazo los algoritmos de adquisición y procesamiento de imágenes en tiempo real (Bellakenal y otros, 2011), por lo que no reduce significativamente las exigencias de cómputo que se logran al prescindir del cálculo de la cinemática directa. Este trabajo propone una solución que garantiza el control de la posición y de sus sucesivas derivadas, lo cual cumple con las especificaciones del control de seguimiento de trayectoria en espacio de tareas utilizando la solución de la cinemática directa en uno de los casos para la estimación del espacio cartesiano. Además, utiliza el cálculo del modelo dinámico inverso para el cálculo de la ley de control. En la Figura 1.7-a) se muestra cómo la realimentación de velocidad se realiza utilizando la solución del modelo Jacobiano inverso, su uso evita las oscilaciones en la ley de control que podría causar en el sistema el uso de la derivada de la medición de la pose que se muestra en la Figura 1.7-b)..
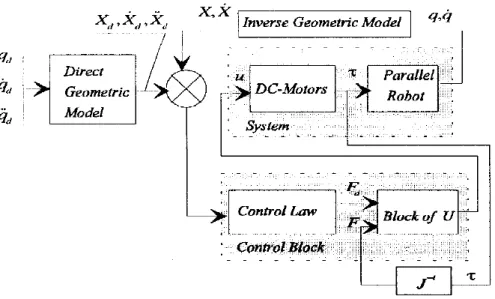
(31) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 21. Figura 1.7: Control cartesiano basado en cinemática directa (a) y sistema sensorial basado en imagen (b). En este trabajo se aborda el problema de control de seguimiento de trayectoria de un robot paralelo que incluye la dinámica del actuador eléctrico en el espacio de tareas, en la Figura 1.8 se muestra el esquema de control general. Para estos robots accionados eléctricamente, se diseña una ley de control no lineal en las tensiones de entrada de las armaduras (Beji y otros, 1998). La técnica de control consiste en un control de seguimiento de una trayectoria cartesiana y un control de fuerza convergente. El modelo obtenido está en forma estándar para permitir la aplicación de métodos de perturbación singular. Para validar el controlador correctivo propuesto, el concepto de pasividad y las técnicas de perturbación singulares se combinan con éxito. Los resultados de la simulación muestran un buen comportamiento del controlador de seguimiento de trayectoria en espacio de tareas propuesto. En este caso particular la trayectoria deseada se da en coordenadas articulares, y la realimentación de la pose y sus sucesivas derivadas se realiza a partir de la solución del modelo geométrico inverso..
(32) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 22. Figura 1.8: Diagrama de bloques del sistema y del bloque de control. En este trabajo con el fin de mejorar la precisión de seguimiento de la trayectoria de un robot paralelo plano de tres grados de libertad, se desarrolla un nuevo enfoque de control basado en el control adaptativo con el uso del denominado error de sincronización (Ren y Mills, 2006). Al igual que el error de contorno propuesto para las máquinas herramientas, el error de sincronización definido representa el grado de coordinación entre las juntas activas en el robot paralelo, que es sustancialmente diferente de los errores de seguimiento tradicionales. Mediante el uso del error de sincronización, todas las juntas activas del robot paralelo se controlan para moverse de una manera sincrónica de modo que la precisión de seguimiento de la trayectoria del efector final del robot se mejore sustancialmente. Además, con el uso del control adaptativo, se garantiza que el error de sincronización y el error de pose de la plataforma converjan a cero simultáneamente, mientras que los parámetros inciertos en el modelo dinámico del sistema se garantizan que convergen a sus valores verdaderos. Los experimentos realizados en el robot paralelo plano verifican las reivindicaciones anteriores y evalúan el rendimiento del enfoque de control propuesto, en comparación con el control PID convencional. En este artículo el control de seguimiento de trayectoria de los manipuladores paralelos está dirigido a la presencia de la flexibilidad en las unidades de articulación (Figura 1.9). El amortiguamiento estructural articular también se considera en el modelo dinámico. El sistema se convierte primero en una estructura de árbol abierto mediante la desconexión de.
(33) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 23. un número suficiente de juntas no accionadas. Los bucles cerrados se expresan entonces mediante ecuaciones de restricción. Se muestra que, en un robot paralelo con accionamientos de unión flexibles, las ecuaciones de dinámica inversa de nivel de aceleración son singulares porque los pares de control no tienen un efecto instantáneo sobre las aceleraciones del efector final debido a los medios elásticos. Eliminando los multiplicadores de Lagrange y las variables intermedias, se obtiene una relación de entradasalida de cuarto orden entre los pares de actuadores y las variables de posición, velocidad y aceleración del efector final (Ider y Korkmaz, 2009). La ley de control propuesta desacopla y linealiza el sistema y logra estabilidad asintótica por realimentación de la posición y la velocidad de las articulaciones y rotores accionados. Como estudio de caso, se simula un manipulador paralelo plano de tres grados de libertad para ilustrar el rendimiento del método. La trayectoria deseada del efector final se elige de tal manera que se evitan las posiciones cinemáticas y de accionamiento del singular.. Figura 1.9: Implementación del esquema de control dinámico inverso. Por otra parte, Izaguirre propone un esquema de control cartesiano para un robot paralelo de 3 GDL en aplicación de simulador de movimiento (Izaguirre, 2012). El mismo (Figura 1.10) consiste en un esquema de control en cascada donde en el lazo interno se implementa un control desacoplado para cada una de las articulaciones y en el lazo externo se resuelve el problema de posicionamiento del efector final de la plataforma. Para el cálculo de la posición deseada de cada articulación se emplea el modelo cinemático inverso y para la.
(34) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 24. realimentación de la pose del efector final se implementa un sistema sensorial extereoceptivo que evita el uso del modelo cinemático directo, que para el caso específico del robot de 3GDL resulta en una solución muy engorrosa y el modelo da como solución múltiples resultados. Este esquema de control no resuelve el problema de seguimiento de trayectoria en el espacio de tareas para esta estructura robótica, pero el esquema representa una arquitectura abierta, lo cual hace posible la incorporación de otras leyes de control al mismo sin afectar el comportamiento ni la filosofía de control del esquema propuesto.. Figura 1.10: Esquema de control cartesiano en espacio de tareas. 1.4. Conclusiones parciales. Los robots paralelos tienen altas ventajas en múltiples aplicaciones. Su control trae consigo grandes retos debido al carácter no lineal, al acoplado de su estructura y a la existencia de diferentes tipos de singularidades en el sistema. El modelado cinemático, así como el dinámico de las estructuras paralelas, constituyen procedimientos muy laboriosos y que requieren gran potencia de cálculo para su implementación en aplicaciones de tiempo real, no obstante, el acelerado desarrollo de los microcontroladores y su gran potencia de cálculo, permiten el uso de estos modelos para la implementación de estrategias de control donde no se cuente con un sistema sensorial. Las diferentes estrategias de control en espacio de tareas puestas a consideración resultan eficientes para el control de seguimiento de trayectoria en aplicaciones de robots paralelos de diferentes grados de libertad, aunque en su mayoría es un requerimiento la obtención del modelo dinámico del sistema..
(35) CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. 25. El esquema de control cinemático en espacio de tareas, por su característica de arquitectura abierta y que prescinde del modelo dinámico del robot, resulta ser una solución a tener en cuenta para la implementación de un esquema de control de seguimiento de trayectoria en espacio de tareas con realimentación de velocidad en el robot paralelo de 2GDL. La solución propuesta en (Bellakenal y otros, 2011) puede ser adaptada al esquema de control cartesiano propuesto en (Izaguirre, 2012), utilizando la solución de los modelos Jacobianos para la estimación de las velocidades tanto de las articulaciones como de las coordenadas cartesianas del robot, y de esta manera, tener el control tanto de la posición como de la velocidad del ladeo y el cabeceo en el simulador neumático de 2GDL..
(36) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 26. CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. En este capítulo se realiza primeramente una descripción de la plataforma de 2 GDL. Seguido a esto, se realiza la descripción del modelo cinemático inverso obtenido de la plataforma objeto de estudio para estimar las elongaciones de los pistones a partir de las variables espaciales de orientación y el modelo cinemático directo, estos dos a partir de la formulación vectorial y la obtención de la Jacobiana (directa e inversa). También se obtiene el modelo lineal del sistema electro-neumático a través del método de identificación experimental para la obtención de los reguladores encargados del control articular. 2.1. Descripción de la plataforma de dos grados de libertad. El simulador de movimiento objeto de estudio es un robot paralelo de dos grados de libertad, en la Figura 2.1 se muestra la estructura robótica. El mismo está compuesto por una base fija que se une a la plataforma móvil mediante dos cadenas cinemáticas independientes.. Figura 2.1: Plataforma de dos grados de libertad SIMPRO..
(37) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 27. Cada extremidad posee un pistón neumático FESTO DNCB-100-320-PPV-A de doble efecto de desplazamiento lineal, los cuales producen los movimientos espaciales de la cabina. Las elongaciones de los vástagos de los cilindros son sensadas por potenciómetros lineales, tipo MLO-POT-500-TLF, de ± 0,01 mm de precisión, cuyas señales de salida sirven como retroalimentación a los lazos de control, para lograr desplazamientos precisos de los vástagos, garantizando la correcta orientación de la plataforma móvil en cada instante de tiempo. Los pistones son accionados por válvulas MPYE 5-3/8-010-B, este accionamiento proporciona al sistema los dos grados de libertad con que se mueve en el espacio de tareas, denominados: ladeo y cabeceo, representados por las variables α y β respectivamente. De esta forma se logra la orientación deseada del elemento terminal en el espacio cartesiano, y gracias a ello, simular escenarios virtuales que son visualizados en un monitor ubicado en el interior de una cabina que, con capacidad para dos personas, descansa sobre la plataforma móvil. El robot está diseñado para soportar una carga de 2.18 su peso total, por lo que posee una excelente relación carga útil-peso, además, posee un espacio de trabajo relativamente pequeño, ambas características esenciales en los robots paralelos. Los grados de libertad de la plataforma móvil varían para el cabeceo de -13°a 19° y para el ladeo de 13° a -19°. En la Tabla 2.1 se muestran de manera resumida los datos técnicos y principales especificaciones del simulador. Tabla 2.1 Datos técnicos de la plataforma de 2 GDL Descripción del Parámetro. Valor. Ángulo de ladeo de la plataforma móvil. de 13° a -19°. Ángulo de cabeceo de la plataforma móvil de -13°a 19° Máxima elongación de los cilindros. 320 mm. Distancia del origen a cada cilindro. 560 mm. Masa total de la cabina. 510 kg.
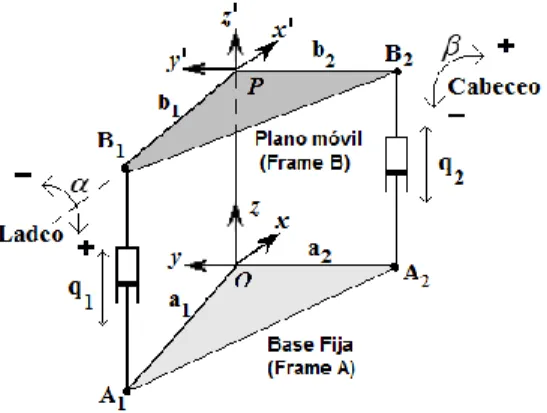
(38) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 2.2. 28. Modelado de la plataforma de 2 GDL. De manera general, en la robótica paralela el sistema de ecuaciones cinemáticas es altamente no lineal y su solución resulta compleja (Cherfia y otros, 2007), en este sentido, el sistema robótico estudiado no es una excepción. Las ecuaciones de la cinemática inversa servirán para conocer los valores adecuados de las elongaciones de los cilindros en cada instante de tiempo, en correspondencia con la orientación y posición deseadas de la plataforma móvil, dadas en el espacio cartesiano. Las expresiones de la cinemática directa permiten determinar la pose del elemento terminal a partir de conocidas las variables articulares y los parámetros geométricos del robot (Lu y otros, 2007). Debido al movimiento altamente acoplado que caracteriza a los robots paralelos, encontrar una única solución a la cinemática directa constituye hoy día una de las problemáticas más difíciles de resolver (Jamwal y otros, 2010). No obstante, dada la configuración estructural de la plataforma de 2 GDL, el cálculo de la cinemática directa proporciona soluciones únicas y su uso para la implementación de estrategias de control de seguimiento en espacio cartesiano no es desechable. Por otra parte, para la implementación de esquemas de control de seguimiento de trayectoria, tanto en el espacio articular como en el de tareas, la medición o estimación de la velocidad de las articulaciones y de las variables cartesianas es de vital importancia para ejercer el control sobre las mismas. Para ello, es necesaria la obtención de los modelos Jacobianos que son los encargados de realizar la estimación de dichas variables. 2.2.1 Modelado cinemático inverso Para el desarrollo del modelo cinemático inverso se emplea la formulación vectorial, método analítico muy intuitivo, que permite mediante procedimiento geométrico desarrollar un sistema de ecuaciones cinemáticas con igual cantidad de ecuaciones que de incógnitas (Merlet, 2006a). Para el caso particular de la plataforma de dos grados de libertad, se tiene que la base fija está compuesta por el triángulo formado por los puntos 𝐴1 𝑂𝐴2 , dependiendo solamente de las longitudes fijas denominadas 𝑎1 y 𝑎2 . Por su parte la plataforma móvil está conformada por el plano que forman los puntos 𝐵1 𝑃𝐵2, siendo única su geometría y solamente.
(39) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 29. dependiente y definida por la longitud de sus bordes 𝑏1 y 𝑏2 , según se muestra en la Figura 2.2.. Figura 2.2: Arquitectura geométrica y notaciones de la plataforma de 2 GDL. En tal sentido, se considera ubicar el sistema de referencia móvil coincidente con el centro del triángulo que conforma el elemento terminal del robot (plataforma móvil), la cual es la responsable de soportar la cabina de conducción. El sistema de referencia fijo se coloca en el centro de la base fija ubicada en la parte inferior de la base metálica que soporta toda la estructura de la plataforma, la cual va sólidamente anclada al suelo. La orientación en el espacio de la plataforma móvil estará determinada por los ángulos de rotación α y β. El ángulo α es el ángulo de rotación alrededor del eje x’ del sistema (x’y’z’) de coordenadas móviles, el cual da la sensación de cabeceo, mientras que β denota el ángulo de rotación alrededor del eje y’, el cual brinda la sensación de ladeo. Según el esquema de la Figura 2.2, se puede plantear la siguiente ecuación cerrada vectorial válida para ambas cadenas cinemáticas del robot: ⃗⃗⃗⃗⃗⃗⃗ 𝑂𝐴𝑖 +⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐴𝑖 𝐵𝑖 + 𝐵𝐴 ⃗⃗⃗⃗⃗⃗ 𝑃𝐵𝑖 ⃗⃗⃗⃗⃗ 𝑂𝑃 = 0. ∀ 𝑖 = 1, 2. (2.1). Donde 𝐵𝐴 es la matriz de rotación del sistema de referencia móvil (frame B) respecto al fijo (frame A), que permite conocer la orientación de la plataforma móvil. En este sentido se emplean los ángulos de Euler en el convenio ZYX conocido también como "roll-pitchyaw", donde:. A B. cos sen 0. sen cos 0. 0 cos 0 0 1 sen. 0 sen 1 0 1 0 0 cos 0 cos 0 sen. 0 sen cos . (2.2).
(40) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 30. Dado que no existe rotación alrededor del eje z, el ángulo de guiñada (ψ) es cero, quedando definida la matriz de rotación como:. A B. cos 0 sen. sen sen cos cos sen. sen cos sen cos cos . (2.3). Dado que se requiere obtener la cinemática inversa del robot, se puede expresar (2.1) en función de la elongación de la articulación activa del robot. ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝐴𝑖 𝐵𝑖 = 𝐵𝐴 ⃗⃗⃗⃗⃗⃗ 𝑃𝐵𝑖 + ⃗⃗⃗⃗⃗ 𝑂𝑃⃗⃗⃗⃗⃗⃗⃗⃗ 𝑂𝐴𝑖. (2.4). Que expresada en forma compacta queda: ⃗⃗⃗ 𝑙𝑖 = ⃗⃗⃗ 𝑏𝑖 + ⃗⃗⃗𝑝 ⃗⃗⃗⃗ 𝑎𝑖. (2.5). Donde la magnitud de los vectores en (2.5) se calculan como:. . p OP Px , Py , Pz. ai OAi. bi PBi. O , O T. x. y. , Oz. . T. (2.6) (2.7). 2. (2.8). 2. La expresión (2.4) se puede escribir para cada cadena cinemática de la forma: Li = 𝐵𝐴. A. B. bi + Ap Aai. (2.9). Derivando (2.9) y dado que Aai y Ap son vectores de magnitud constante, se tiene: 𝐴 𝐵𝑖. 𝐴 = 𝐵̇ bi 𝒛̂𝒊 + 𝐵𝐴 𝑏̇𝑖 𝒛̂𝒊. El término. 𝐴 𝐵𝑖. (2.10). representa la velocidad lineal del punto de pivoteo Bi de cada extremidad. activa del robot, referida al sistema referencial fijo (frame A). Esta componente de velocidad es perpendicular al vector unitario que apunta a lo largo de cada uno de los ejes de rotación, según se ilustra en la Figura 2.3..
(41) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 31. Figura 2.3: Representación de velocidad lineal del punto de pivoteo Bi en el sistema referencial móvil. La variable 𝒛̂𝒊 es el vector unitario que apunta en dirección de ⃗⃗⃗ 𝐿𝑖 . Multiplicando (2.10) por 𝐴 1 𝐵 , 𝐵. y puesto que la velocidad lineal del vector bi es cero, se tiene que:. 𝐴 ( 𝐵𝑖𝐴) = 𝐵̇. 𝐴 −1 𝐵. bi 𝒛̂𝒊. (2.11). Teniendo en cuenta la velocidad angular de un cuerpo rígido, se tiene: A Bi. 𝐴 = bi 𝐳̂𝐢 = ( AB × bi ) 𝐳̂𝐢 , siendo = 𝐵̇. 𝐴 −1 𝐵. (2.12). Donde: : Matriz simétrica de Skew. 𝐴 𝐵 :. Vector de velocidad angular del sistema referencial B respecto al A, es decir, la. velocidad angular de la plataforma móvil. 2.2.2 Modelado cinemático directo En el caso de la cinemática directa la variable conocida sería la longitud del brazo articulado, y las incógnitas son el ángulo α y el ángulo β que definen la orientación del efector final.. Figura 2.4: Representación de la cadena cinemática perteneciente al movimiento de cabeceo..
(42) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 32. Se analiza la cadena cinemática (Figura 2.4) correspondiente al movimiento de cabeceo y se logra, mediante leyes trigonométricas referidas al ángulo φ, la ecuación (2.13) de la cinemática inversa, que permite conocer la longitud de la articulación 𝐴2 𝐵’2 en función de la orientación del elemento terminal. 2 2 2 ̅̅̅̅̅̅̅ ̅̅̅̅̅2 ̅̅̅̅̅̅ 𝐴2 𝐵’2 = ̅̅̅̅̅ 𝑃𝐴2 + ̅̅̅̅̅̅ 𝑃𝐵’2 − 2𝑃𝐴 𝑃𝐵’2 cos φ. (2.13). Teniendo en cuenta: ̅̅̅̅̅̅ 𝑃𝐵’2 = 𝑏2. (2.14). 2 ̅̅̅̅̅ ̅̅̅̅2 + ̅̅̅̅̅ 𝑃𝐴2 = √𝑂𝑃 𝑂𝐴2. (2.15). 𝜑 = 𝜑0 + 𝛼. (2.16). Donde 𝜑0 es el ángulo inicial comprendido entre ̅̅̅̅̅ 𝑃𝐴2 y ̅̅̅̅̅ 𝑃𝐵2 y se calcula mediante la siguiente ecuación: ̅̅̅̅ 𝑂𝑃. 𝜑0 = tan−1 ( ̅̅̅̅̅̅ ) 𝑂𝐴. (2.17). 2. Para la solución de la cinemática directa, se puede despejar de la ecuación (2.13) el término 𝜑. 𝜑 = cos −1 (. 2 ̅̅̅̅̅̅̅2 ̅̅̅̅̅̅̅̅2 ̅̅̅̅̅̅ 𝑃𝐴2 +𝑃𝐵’ 2 −𝐴2 𝐵’2 ) ̅̅̅̅̅̅̅ ̅̅̅̅̅̅ 2𝑃𝐴 2 𝑃𝐵’2. (2.18). α = 𝜑 − 𝜑0. (2.19). Figura 2.5: Representación de la cadena cinemática perteneciente al movimiento de ladeo..
(43) CAPÍTULO 2. MODELADO DEL ROBOT PARALELO DE 2 GDL. 33. Para el análisis del movimiento de ladeo se realiza de la misma forma, solo que es la otra cadena correspondiente al ángulo β y los restantes puntos (Figura 2.5), como se expone en las siguientes ecuaciones: 2 2 ̅̅̅̅̅̅̅ ̅̅̅̅̅̅1 2 − 2𝑃𝐴 ̅̅̅̅̅1 ̅̅̅̅̅̅ 𝐴1 𝐵’1 = ̅̅̅̅̅ 𝑃𝐴1 + 𝑃𝐵’ 𝑃𝐵’1 cos φ. (2.20). Teniendo en cuenta: ̅̅̅̅̅̅ 𝑃𝐵’1 = 𝑏1. (2.21). 2 ̅̅̅̅̅ 𝑃𝐴1 = √̅̅̅̅ 𝑂𝑃2 + ̅̅̅̅̅ 𝑂𝐴1. (2.22). 𝜃 = 𝜃0 + 𝛽. (2.23). Donde 𝜃0 es el ángulo inicial comprendido entre ̅̅̅̅̅ 𝑃𝐴1 y ̅̅̅̅̅ 𝑃𝐵1 y se calcula mediante la siguiente ecuación: ̅̅̅̅ 𝑂𝑃. 𝜃0 = tan−1 ( ̅̅̅̅̅̅ ) 𝑂𝐴 1. (2.24). Para la solución de la cinemática directa quedaría de la siguiente forma: 𝜃 = cos −1 (. 2 ̅̅̅̅̅̅̅2 ̅̅̅̅̅̅̅̅2 ̅̅̅̅̅̅ 𝑃𝐴1 +𝑃𝐵’ 1 −𝐴1 𝐵’1 ) ̅̅̅̅̅̅ 2𝑃𝐴1 ̅̅̅̅̅̅̅ 𝑃𝐵’1. 𝛽 = 𝜃 − 𝜃0. (2.25) (2.26). 2.2.3 Cinemática diferencial Debido a la existencia de múltiples cadenas cinemáticas cerradas en robots paralelos, el análisis de la cinemática diferencial se convierte en un problema de mucha mayor complejidad que en los robots serie (Zhiyong y Ghorbel, 2006). En este contexto la matriz Jacobiana relaciona la velocidad espacial del elemento terminal (dx/dt) con la razón de cambio de las coordenadas articulares actuadas del robot (dq/dt). Es de notar que para los robots paralelos muchos autores prefieren emplear la notación inversa establecida para los tipos serie, dada la diferencia existente entre el problema cinemático directo e inverso en ambos tipos de robots (Sokolov y Xirouchakis, 2007). Dado que se cumple:.
Figure



+7




Documento similar
[r]
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
En función de estos hallazgos y la toxicidad cardíaca observada en ratones, se deben obtener los niveles de troponina I antes de la perfusión con onasemnogén abeparvovec, y se
