Identificación experimental de un avión no tripulado (UAV)
60
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Identificación experimental de un avión no tripulado (UAV) Autor: Lisandra Sánchez Martínez [email protected] Tutor: Dr. C. Boris Luis Martínez Jiménez [email protected] M. Sc. Luis Mariano Pineda Bombino [email protected]. Santa Clara 2012 "Año 54 de la Revolución".
(3) Hago constar que el presente TRABAJO DE DIPLOMA fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicado sin autorización de la Universidad.. Lisandra Sánchez Martínez Autor. Fecha. Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Dr. C. Boris Luis Martínez Jiménez Jefe del Departamento. Fecha. Responsable ICT o J’ de Carrera, (Dr. C., M. Sc. o Ing.) Responsable de Información Científico-Técnica. Fecha.
(4)
(5) I. PENSAMIENTO. “No tengo ningún talento, tan sólo una apasionada curiosidad” Albert Einstein. “El mundo se está quedando sin genios: Einstein se murió... y a mí me duele la cabeza.” Anónimo.
(6)
(7) II. DEDICATORIA. A mi hermano, Ale, espero que le sirva de inspiración.. A mis abuelos, Justo y Juana, por regalarme a mi padre, aunque no los conocí.. A mis abuelos, Alfredo y Elva, por regalarme a mi madre y por el cariño dado.. A mi padre, consejero y ejemplo.. A mi madre, fiel amiga y guía.. A mi tío Alfre, incondicional y cariñoso siempre.. A mi novio, Noel, por la paciencia y el aguante..
(8)
(9) III. AGRADECIMIENTOS. Quiero agradecerles a mi tutor, familiares, amigos y todos los que de una forma u otra me han ayudado. Pero siempre he de destacar la labor realizada durante este tiempo y en toda mi vida, por las siguientes personas (para hacer justicia y no dar privilegios, les nombro en el orden en que entraron a mi vida): Mi padres, Silvia y Justo; responsables de lo que soy y por quienes he llegado hasta aquí. Mis tíos Alfre y Rene; que siempre me han apoyado y tratado como una hija. Mis amigas, como hermanas; Mayrelis, Anienmy y Mirta; que han estado siempre que las he necesitado y no me fallan. Mary y Zulema, amigas y madres; por apoyar a mi mamá y darme su cariño. Teymor, por la confianza del pre, y su madre Odalys; maravillosas personas cuyos consejos siempre fueron de ayuda..
(10) IV. Mis compañeras de cuarto, amigas también; Elianny, Gretter y Liset; por todos los buenos momentos y las risas cuando más insoportable se hacía la beca. Mis compañeros, graduación 2011; que me ayudaron mucho, especialmente Lemus. Mi novio; por llegar en un momento difícil de cambio y hacerme muy feliz. Mi suegro, Noel; por acogerme como una hija. Yasiel, Jesús y Yenier; por ser parte del “piquete” de excursiones..
(11)
(12) V. RESUMEN. Los vehículos aéreos no tripulados son muy utilizados e investigados a nivel mundial debido a sus diversas aplicaciones. Algunas empresas del país han mostrado interés y en nuestra universidad se han realizado varias investigaciones relacionadas con el tema. Se han obtenido modelos experimentales con el fin de validar prototipos analíticos, sin embargo no se cuenta con un modelo empírico validado estadísticamente. El objetivo de este trabajo es aplicar técnicas clásicas de identificación de sistemas en UAV y la validación del mismo. El modelo será hallado con la ayuda de la herramienta de identificación de sistemas del Matlab y su validación estadística estará fundamentada sobre la base de los criterios que brinda esta herramienta..
(13) VI. ABSTRACT. Unmanned aerial vehicles are very utilized and investigated worldwide due to its diverse applications. Some enterprises of the country have shown interest and several investigations related with the theme have come true at our university. They have obtained experimental models with the aim of validating analytical prototypes; however doesn’t have an empiric model validated statistically. The objective of this work is to accomplish an analysis over the application of classical techniques of systems’ identification in UAV and the validation of the same. The model will be found with Matlab's system identification toolbox and its statistical validation will be established envelope base of the criteria that offers this tool..
(14)
(15) VII. ÍNDICE DE CONTENIDOS. PENSAMIENTO ....................................................................................................... I DEDICATORIA........................................................................................................ II AGRADECIMIENTOS ............................................................................................ III RESUMEN .............................................................................................................. V ABSTRACT ............................................................................................................ VI ÍNDICE DE CONTENIDOS ................................................................................... VII INTRODUCCIÓN .................................................................................................... 1 CAPÍTULO 1.. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN. DE UN UAV............................................................................................................. 5 1.1. Desarrollo de los UAV en el mundo. .......................................................... 5. 1.2. Aplicaciones. .............................................................................................. 6. 1.3. Modelo matemático analítico. .................................................................... 7. 1.3.1. Fuerzas que actúan en el avión........................................................... 7. 1.3.2. Partes del avión. Superficies de control. ............................................. 8. 1.3.3. Modelado. ............................................................................................ 9. 1.4. Identificación Experimental. ....................................................................... 9. 1.4.1. Métodos de identificación. ................................................................. 10. 1.4.2. Métodos de validación. ...................................................................... 11.
(16) VIII 1.5. Consideraciones finales del capítulo. ....................................................... 11. CAPÍTULO 2.. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN. EXPERIMENTAL Y LA VALIDACIÓN ................................................................... 13 2.1. Modelo Analítico. ..................................................................................... 13. 2.1.1. Modelo longitudinal............................................................................ 14. 2.1.2. Modelo lateral. ................................................................................... 14. 2.2. Proceso de identificación. ........................................................................ 15. 2.2.1. Planificación del experimento. ........................................................... 16. 2.2.2. Registro de datos. ............................................................................. 17. 2.2.3. Tratamiento de los datos. .................................................................. 17. 2.2.4. Elección de la estructura del modelo. ................................................ 17. 2.2.5. Selección del criterio de ajuste del modelo. ...................................... 18. 2.2.6. Cálculo del modelo. ........................................................................... 18. 2.2.7. Validación de modelo. ....................................................................... 18. 2.2.8. Revisión. ............................................................................................ 18. 2.3. Herramienta de identificación de sistemas del Matlab. ............................ 18. 2.3.1 Como acceder a la herramienta de identificación. ................................ 19 2.4. Ensayo para la identificación. .................................................................. 20. 2.4.1. Modelo longitudinal............................................................................ 22. 2.4.2. Modelo lateral. ................................................................................... 22. 2.5. Métodos estadísticos. .............................................................................. 23. 2.5.1. Autocorrelación.................................................................................. 23. 2.5.2. Correlación cruzada. ......................................................................... 23. 2.6. Consideraciones finales del capítulo. ....................................................... 23. CAPÍTULO 3.. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN ... 25.
(17) IX 3.1. Modelo longitudinal. ................................................................................. 25. 3.1.1. Análisis de autocorrelación de residuos. ........................................... 27. 3.1.2. Análisis de correlación cruzada. ........................................................ 27. 3.2. Modelo lateral. ......................................................................................... 28. 3.2.1. Análisis de autocorrelación de residuos. ........................................... 29. 3.2.2. Análisis de correlación cruzada. ........................................................ 30. 3.3. Análisis económico .................................................................................. 30. 3.4. Consideraciones finales del capítulo ........................................................ 31. CONCLUSIONES Y RECOMENDACIONES ........................................................ 32 Conclusiones ..................................................................................................... 32 Recomendaciones ............................................................................................. 33 REFERENCIAS BIBLIOGRÁFICAS ...................................................................... 34.
(18)
(19) INTRODUCCIÓN. 1. INTRODUCCIÓN. Un vehículo aéreo no tripulado, o UAV (Unmanned Aerial Vehicle), al ser generalmente pequeño suele confundirse con un misil, ya que este último tampoco requiere tripulación. Por lo que se define el UAV como un vehículo sin tripulación reutilizable, capaz de mantener un nivel de vuelo controlado y sostenido, que puede ser propulsado por batería, un motor de explosión o reacción. El vertiginoso desarrollo de los vehículos aéreos ha condicionado la vida del hombre. La masificación de este medio de transporte o entretenimiento, arma de combate y plataforma de investigación, ha sido crucial en el desarrollo histórico y científico de la sociedad. Una de las tendencias de desarrollo más actuales son los vehículos aéreos no tripulados (UAV). Estos gozan en la actualidad de gran popularidad y aceptación a nivel mundial debido a las ventajas que brindan para el cumplimiento de misiones en lugares de difícil acceso, de reconocimiento, supervisión y vigilancia sin riesgos para la vida del piloto.(Martínez 2009) Los aviones de pequeño porte no tripulados destacan entre los UAV por su estabilidad, menor complejidad y considerable ahorro en comparación con los vehículos convencionales. Poseen una variada gama de aplicaciones que van desde la inspección de infraestructuras, líneas eléctricas, oleoductos y gaseoductos hasta el levantamiento topográfico para la elaboración de mapas y toma de fotografías aéreas, además de ser utilizados en supervisión de tráfico, vigilancia de fronteras y búsqueda de personas desaparecidas en fenómenos naturales.(Martínez 2009) La Identificación Experimental de sistemas es la obtención de forma experimental de un modelo que reproduzca con suficiente exactitud, para los fines deseados,.
(20) INTRODUCCIÓN. 2. las características dinámicas de la planta en cuestión. En el campo de los UAV, y específicamente de aviones, este método es muy utilizado debido a lo complejas que resultan estas plantas y a que es muy difícil tener en cuenta a la hora de la modelación todas y cada una de las interacciones y fenómenos físicos que tienen lugar en las mismas (Martínez 2009). Una gran cantidad de universidades y centros de investigación, tanto privados como públicos, realizan investigaciones con vehículos aéreos autónomos, destacándose los aviones por tener menor complejidad y ser más económicos. Entre las principales instituciones a nivel mundial que siguen su desarrollo e investigaciones se encuentran la NASA (Allen, Ryan et al. 2002), la Agencia de Defensa y Seguridad de Suecia (FOI) (Grankvist 2006), el Instituto Tecnológico de Massachusetts (MIT) (King 2002), la Universidad Tecnológica de Delft en Holanda (Bennani and Looye 2000), la Universidad de Aalborg en Dinamarca (Jorgen, Agesen et al. 2008), la Universidad de Cranfield en el Reino Unido (Lancaster 2004), la Universidad de Stanford (Soon and Tomilicin 2003), la Universidad de La Florida (Lee 2004).(Martínez 2009) Varios organismos de nuestro país se han interesado en el tema (GEOCUBA, CEMPALAB, CEDAI, FAR). En nuestra universidad también se han hecho varios trabajos de diploma, así como tesis de maestría y doctorado, en las cuales se aborda el tema de los UAV desde diferentes ángulos. Con este proyecto se pretende contribuir a la obtención de un modelo para el UAV a través de la identificación experimental, que contribuya al desarrollo de los diferentes métodos de control del mismo y ofrecer una respuesta adecuada con soluciones económicamente factibles. Se desea que esta investigación, a la postre permita a los especialistas realizar estudios y análisis comparativos, que en función de la disponibilidad de los recursos, logren su mejor utilización y así continuar desarrollando nuevas técnicas teniendo en cuenta los resultados prácticos alcanzados y la confrontación con otros métodos y herramientas de identificación..
(21) INTRODUCCIÓN. 3. Con la ejecución del proyecto se dan soluciones a problemáticas modernas de gran complejidad y valor cuya adquisición no es viable actualmente en nuestro país. Se tiene la intención de colaborar además en el desarrollo y puesta en marcha de UAV. Los resultados de la investigación poseen una aplicación práctica y teórica de gran trascendencia para los UAV que está desarrollando el Grupo de Automatización, Robótica y Percepción (GARP) de la Universidad Central “Marta Abreu” de Las Villas. El proyecto es viable porque se cuenta con el presupuesto, los recursos materiales y el personal calificado para acometer el mismo. Además de la existencia de trabajos precedentes que constituyen un punto de partida para la investigación. A pesar de que existen trabajos anteriores en los que se han determinado los modelos longitudinal y lateral, a partir de los cuales se han sintonizado reguladores que en la práctica funcionan. Estadísticamente no se cuenta con datos que demuestren la validez de los mismos. Entonces: ¿Cómo contribuir a la obtención de un modelo factible para el UAV, teniendo en cuenta los principios de la identificación experimental y la aplicación del mismo tal que sea posible justificarlo estadísticamente? Para esto se han planteado los siguientes objetivos: Generales Aplicar técnicas clásicas de identificación de sistemas en UAV. Específicos Revisar la bibliografía existente sobre el tema. Seleccionar el modelo más adecuado para el UAV. Constatar los resultados obtenidos. Con el fin de dar cumplimiento a los mismos, se proponen las siguientes tareas de investigación:.
(22) INTRODUCCIÓN. 4. Revisión bibliográfica técnico-especializada para la construcción del marco teórico de referencia general de la pesquisa, la delimitación y caracterización de problema en cuestión. Comparación de los algoritmos seleccionados tal que permita obtener el modelo más adecuado en función de los recursos disponibles. Validación del modelo obtenido, mediante diversos métodos estadísticos. El. informe. está. dividido. en:. introducción,. tres. capítulos,. conclusiones,. recomendaciones, referencias bibliográficas y anexos. Los capítulos están organizados de la siguiente manera: Capítulo I: Se realiza un análisis crítico de la literatura especializada consultada. Se presentan los principales conceptos que se tratan en este trabajo. Se plantea la panorámica general existente en torno al problema de identificación de UAV. Capítulo II: Se dedica al estudio del proceso de identificación y de los principales modelos que se utilizan en la actualidad. Así como de la herramienta de identificación del Matlab y lo conceptos estadísticos que se tratan. Capítulo III: Se consagra a expresar los resultados de la identificación y la validación, mediante la comparación con métodos estadísticos, de la efectividad del método y la calidad del producto..
(23)
(24) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 5. CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. En este capítulo se realiza un análisis crítico de la literatura especializada consultada. Se plantea la panorámica existente en torno a los UAV y sus principales aplicaciones. Asimismo se realiza un breve bosquejo de las fuerzas y partes del avión y del proceso de modelación. Finalmente se destacan los métodos más utilizados en cuanto a la identificación experimental de UAV.. 1.1 Desarrollo de los UAV en el mundo. El desarrollo de los UAV en el mundo ha avanzado considerablemente, en la actualidad existen proyectos de colaboración entre varios países. Esto se debe en gran medida a la alta fiabilidad que brindan estos equipos y la variada gama de aplicaciones así como la seguridad que implican para las vidas humanas al poder encontrarse el piloto distante del lugar de operación. El ejemplo más antiguo fue desarrollado después de la primera Guerra Mundial, y se emplearon durante la segunda Guerra Mundial para entrenar a los operarios de los cañones antiaéreos. Sin embargo, no es hasta finales del siglo XX cuando operan los UAV mediante radio control, con todas las características de autonomía. En la actualidad, con el desarrollo de los microcontroladores y de los sensores inerciales de tecnología de estado sólido, es posible fabricar estas máquinas a un precio asequible, siendo un área importante de la investigación aeronáutica y aeroespacial durante la última década.(Pineda 2008).
(25) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 6. Gran cantidad de universidades y centros de investigación, tanto privados como públicos, realizan investigaciones con vehículos aéreos autónomos, destacándose los aviones por tener menor complejidad y ser más económicos (Martínez 2009).. 1.2 Aplicaciones. En la actualidad las aplicaciones de los UAV son tan variadas como los campos en que pueden ser implementados. Algunas muestras de esto son (Pineda 2011): Vigilancia: forestal para la prevención de incendios, policial, fronteriza y costera. Fotografía y filmación de video aéreo. Control de tráfico por carretera. Búsqueda y rescate de personas, ante desastres y emergencias. Investigación y educación: como plataforma interactiva para el aprendizaje. Telecomunicaciones: como seudo-satélite de comunicaciones de emergencia o de uso puntual. Meteorología: para estudios atmosféricos, análisis y seguimiento de la contaminación ambiental y fenómenos meteorológicos. Y otras con fines humanitarios, agrícolas, publicitarios, etc. En nuestro país se realizan algunas de las aplicaciones antes mencionadas con vehículos de gran tamaño, que requieren un mayor gasto de combustible y necesitan de reparaciones con mayor frecuencia, lo que trae consigo grandes pérdidas económicas. Además con el uso de los UAV sería eliminado el riesgo que implican estas misiones para la vida de los pilotos de las aeronaves convencionales..
(26) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 7. 1.3 Modelo matemático analítico. Producto a la creciente popularidad de los UAV, muchas instituciones a nivel mundial dedican importantes recursos a la investigación de los mismos. Una parte importante de estos recursos son destinados a la obtención de los modelos matemáticos de estos vehículos.(Martínez 2009). 1.3.1 Fuerzas que actúan en el avión. Existen cuatro fuerzas fundamentales que actúan sobre un avión (Fig 1.1). Estas se describen a continuación: Sustentación: Es originada por la forma de las alas del avión y le permite al mismo elevarse. Arrastre: Es debido al pulimentado de las partes del avión expuestas al flujo de aire. Propulsión: Es generada por el motor del avión para impulsarlo. Gravedad: Es provocada por el campo gravitacional de la Tierra y se mantiene relativamente constante en vuelos dentro de la atmósfera.. Fig 1.1: Fuerzas que actúan sobre el avión. Además de las fuerzas básicas anteriores, existen los momentos (torques) del avión, que se producen por la acción de las fuerzas en torno a un punto (Martínez.
(27) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 8. 2009). Estos dan lugar a tres tipos de giro, que se generan en torno a los ejes del avión: alabeo, cabeceo y guiñada (Fig 1.2).. Fig 1.2: Giros del avión.. 1.3.2 Partes del avión. Superficies de control. Las partes fundamentales del avión son las siguientes (Fig 1.3): Hélice (1): Genera la fuerza que mueve el avión hacia delante. Fuselaje (2): Es el cuerpo del avión. Guarda los sensores, sistemas de control y demás componentes. Alas (3): Proveen el empuje que permite volar al avión. Alerones (4): Se usan para manipular el ángulo de alabeo y guiñada. Ambos alerones se encuentran siempre en sentido contrario. Estabilizador Horizontal (5): Se utiliza para dar estabilidad en el plano horizontal. Elevador (6): Se usa para manipular el ángulo de cabeceo. Estabilizador Vertical (7): Se utiliza para dar estabilidad en el plano vertical. Timón de cola (8): En aviones comunes se usa para manipular el ángulo de guiñada y proporcionar a los pasajeros un vuelo más estable. En aviones de pequeño porte no se utiliza mucho..
(28) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 9. Fig 1.3: Partes del avión.. 1.3.3 Modelado. Mediante un proceso de modelación se obtiene un modelo longitudinal y otro lateral, ambos en espacio de estado. A pesar de existir parámetros físicos que los relacionan, en la aviación se consideran estos modelos desacoplados uno del otro, para de esta forma calcular algunos parámetros imprescindibles para la dinámica del avión.(Pamadi 2003; Sorensen, Hansen et al. 2005) La obtención de dicho modelo dinámico se basa en las ecuaciones no lineales de fuerza y torques que actúan en el avión, linealizadas a través de la serie de Taylor. Algunos de los parámetros físicos a tener en cuenta son el largo y ancho del ala, largo y peso del avión, y distancias desde el centro de gravedad, entre muchos otros.(Pineda 2008). 1.4 Identificación Experimental. La Identificación Experimental de sistemas es la obtención de forma experimental de un modelo que reproduzca con suficiente exactitud, las características dinámicas de la planta (Martínez 2009). Se emplean datos recolectados en experimentos reales para sintetizar los modelos matemáticos (Martínez, Pineda et al. 2012)..
(29) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 10. En los UAV, debido a la gran complejidad de las plantas, se hace muy difícil, en el modelado, tener en cuenta todos los fenómenos físicos e interacciones que ocurren. De aquí que este sea un método muy utilizado en este campo y principalmente en los aviones.. 1.4.1 Métodos de identificación. Se hace una revisión de los modelos más utilizados en la identificación de UAV, para lo cual se analizan los siguientes artículos: “System identification of post stall aerodynamics for UAV perching” (Hoburg and Tedrake 2010), “Identification of a UAV and design of a hardware in the loop system for nonlinear control purposes” (Manaï, Desbiens et al. 2003), “Aircraft parameter estimation – A tool for development of aerodynamic databases” (Jategaonkar and Thielecke 2000), “Attitude dynamics identification of unmanned aircraft vehicle” (Ali Salman, Sreenatha et al. 2006), “System identification of a small UAV's speeding up process before take of” (Hu, Huang et al. 2001), “System identification of Cessna 182 model UAV” (Lee and Shen 2007). Para la identificación del sistema a partir de la aerodinámica del calado de motor en la línea de salida al elevar el UAV, (Hoburg and Tedrake 2010), comienza con un mínimo cuadrado ideal que minimiza el error de predicción de paso, luego el modelo es sintonizado usando descenso de gradiente para minimizar el error de simulación. Para el control no lineal, en (Manaï, Desbiens et al. 2003), los parámetros más fáciles se determinaron a través de mediciones, para los demás se utilizó con el algoritmo de acceso a la salida de error. El desarrollo de bases de datos aerodinámicas, según (Jategaonkar and Thielecke 2000), utiliza métodos iterativos para la identificación de los parámetros, como Euler, Runge-Kutta de segundo, tercer, cuarto y quinto orden y Runge-Kutta Fehlberg..
(30) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 11. En la identificación dinámica de posición, (Ali Salman, Sreenatha et al. 2006), los datos de las pruebas de vuelo son usados directamente para la identificación y se define un modelo no lineal en espacio estado. En la obtención de un modelo para la identificación del sistema, (Lee and Shen 2007), comparan varios métodos como mínimos cuadrados, descenso coordinado, estimación recursiva con ruido gaussiano y predicción lineal con atraso. La identificación en pequeños UAV teniendo en cuenta el proceso de aceleración antes del despegue, (Hu, Huang et al. 2001), utiliza los modelos ARX, ARMAX, Box Jeinkins (BJ). Siendo este caso el de mayor interés para el presente trabajo, ya que estas son algunas de las propuestas del Matlab en cuanto a la identificación de sistemas se refiere.. 1.4.2 Métodos de validación. De igual forma se analizará la convergencia y robustez de los mismos, a través de la comparación de los diferentes métodos de validación utilizados (residuos, correlación, autocorrelación). Para lo cual se consultaron los artículos siguientes: “Análisis de autocorrelación” (Arranz and Zamora 2002), “Autocorrelación” (Gallego 2008), “Uso de la función de correlación cruzada en la identificación de modelos ARMA” (Castaño and Martínez 2008), “Uso de la función de correlación cruzada en la identificación de modelos para series de tiempo estacionarias y no estacionarias” (Martínez 2007).. 1.5 Consideraciones finales del capítulo. En el presente capítulo se ha evidenciado el desarrollo alcanzado por los UAV a nivel mundial, así como sus principales aplicaciones. Quedaron descritos los conceptos fundamentales que se trabajarán a lo largo del trabajo. Dentro de la revisión bibliográfica se destacan los métodos de identificación más utilizados, haciendo énfasis en los que aparecen en Matlab, los cuales han demostrado que su posibilidad de uso en este tipo de sistema. Por lo que se decide:.
(31) CAPÍTULO 1. FUNDAMENTOS PARA EL MODELADO Y LA IDENTIFICACIÓN DE UN UAV. 12. Obtener un modelo, tomando los datos de entrada-salida durante un experimento en pleno vuelo, utilizando la herramienta de identificación del Matlab. Constatar los resultados obtenidos, a través de métodos estadísticos..
(32)
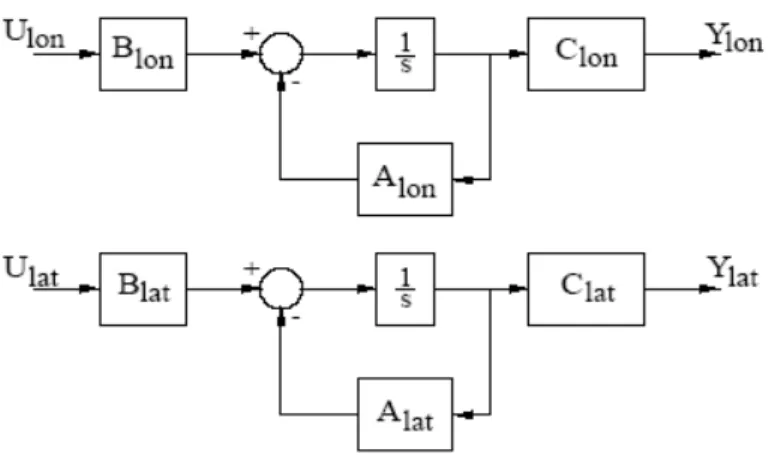
(33) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 13. CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. En este capítulo se describe el modelo analítico, tanto lateral como longitudinal, existente para la aeronave CV10CT. Se dedica al estudio comparativo de diferentes métodos de identificación y se explica el proceso de identificación. Además se realiza un preámbulo al uso de la herramienta de identificación de sistemas del Matlab y se introducen los conceptos estadísticos para la validación.. 2.1 Modelo Analítico. Como se conoce en el modelo del avión, se tienen dos modelos de espacio de estado, uno es el longitudinal y el otro es el movimiento lateral (Pineda 2011). Estos modelos armonizados derivan en el modelo completo (Fig 2.1).. Fig 2.1: Diagrama en bloque del modelo completo..
(34) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 14. A continuación se muestran los modelos obtenidos para la aeronave CV10CT en el trabajo “Control de vehículo aéreo autónomo basado en modelo dinámico” (Pineda 2011).. 2.1.1 Modelo longitudinal. La ecuación en espacio estado para el movimiento longitudinal resulta del siguiente modo (Pineda 2011): 𝑋̇𝑙𝑜𝑛 = 𝐴𝑙𝑜𝑛 𝑋𝑙𝑜𝑛 + 𝐵𝑙𝑜𝑛 𝑈𝑙𝑜𝑛. Tal que:. 𝑋𝑙𝑜𝑛. 𝑢 = �∆𝛼 𝑞� ∆𝜃. Donde 𝑋𝑙𝑜𝑛 son los estados longitudinales: 𝒖. Velocidad frontal. 𝒒. Velocidad angular de Cabeceo. ∆𝜶. Angulo de ataque. ∆𝜽. Angulo de Cabeceo. 𝜹𝒆. Deflexión en el elevador. 𝑈𝑙𝑜𝑛 = �. ∆𝛿𝑒 � ∆𝛿𝑡. Y 𝑈𝑙𝑜𝑛 la entrada de control: 𝜹𝒕. Control en el motor. Finalmente se definen las matrices 𝐴𝑙𝑜𝑛 y 𝐵𝑙𝑜𝑛 : 𝐴𝑙𝑜𝑛. 0 −0.2357 −0.0866 −0.1758 0 = �−0.4669 −2.9292 0.9783 � 0.6830 −53.2296 −5.5353 0 0 0 0 1. 𝐵𝑙𝑜𝑛. 0 0.0107 0 � = � −0.2814 −51.0182 0.2412 0 0. 2.1.2 Modelo lateral. El movimiento lateral en espacio estado se representa de la siguiente forma (Pineda 2011): 𝑋̇𝑙𝑎𝑡 = 𝐴𝑙𝑎𝑡 𝑋𝑙𝑎𝑡 + 𝐵𝑙𝑎𝑡 𝑈𝑙𝑎𝑡.
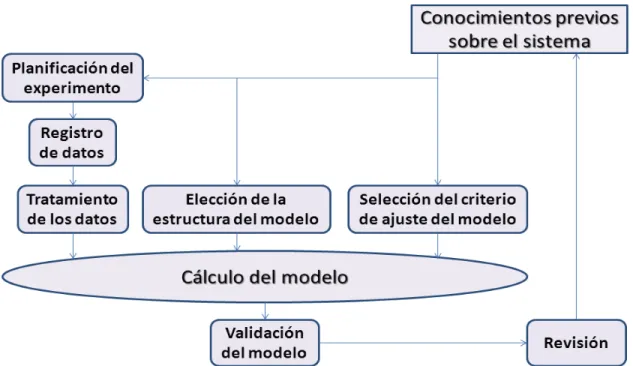
(35) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 15. Tal que:. 𝑋𝑙𝑎𝑡. ∆𝛽 ⎡ ⎤ ⎢ ∆∅ ⎥ =⎢ 𝑝 ⎥ ⎢∆𝛹⎥ ⎣ 𝑟 ⎦. 𝑈𝑙𝑎𝑡 = �. ∆𝛿𝑎 � ∆𝛿𝑟. Donde 𝑋𝑙𝑎𝑡 son los estados laterales: ∆𝜷. Angulo de Deriva. 𝒑. Velocidad angular en el Alabeo. 𝒓. Velocidad angular en el Guiñado. ∆∅. Angulo de Alabeo. ∆𝜳. Angulo de Guiñado. Y 𝑈𝑙𝑎𝑡 la entrada de control: 𝜹𝒂 𝜹𝒓. Deflexión en el alerón Deflexión en el timón. Finalmente se definen las matrices 𝐴𝑙𝑎𝑡 y 𝐵𝑙𝑎𝑡 : −0.0012. 0.2357. −0. 0. ⎡ 0 1 0 0 𝐴𝑙𝑎𝑡 = ⎢⎢−2.1851 0.0007 −41.03 0 ⎢ 0 0 0 0 ⎣ 0.9337 −0.0003 0.4162 0. −1 ⎤ 0 ⎥ 7.0818 ⎥ ⎥ 1 −1.5501⎦. 0. 0.1394. ⎡ ⎤ 0 0 ⎢ 𝐵𝑙𝑎𝑡 = ⎢391.6827 34.4405 ⎥⎥ ⎢ ⎥ 0 0 ⎣ −1.2992 −26.9234⎦. 2.2 Proceso de identificación. El proceso de identificación (Fig 2.2), tiene su base en los conocimientos previos del sistema en cuestión. Este proceso está dividido de la siguiente forma: Planificación del experimento Registro de datos Tratamiento de los datos.
(36) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 16. Elección de la estructura del modelo Selección del criterio de ajuste del modelo Cálculo del modelo Validación de modelo Revisión. Fig 2.2: Proceso de identificación.. 2.2.1 Planificación del experimento. Para la identificación de sistemas se utilizan datos experimentales de entradasalida tomados de la propia planta para obtener una representación matemática de la dinámica del sistema. Este método es muy utilizado porque es directo, basado en datos reales y permite la validación y el refinamiento del modelo.(Adiprawita, Ahmad et al. 2007; Martínez 2009) Para realizar la identificación se lleva a cabo un experimento en pleno vuelo. Dicho experimento se diseña para excitar los controles del avión de forma natural (aunque el diseño descansa en un conocimiento previo de la dinámica del avión).(Soon and Tomilicin 2003; Martínez 2009).
(37) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 17. Se han de especificar el plan de trabajo, tablas, programas, etc. Seleccionar las señales que deben ser registradas, para posteriormente establecer correctamente el intervalo de muestreo de las señales. Además en esta etapa se deben calibrar adecuadamente los instrumentos.. 2.2.2 Registro de datos. Durante el experimento se transmite al avión una señal de mando aleatoria registrándose los cambios provocados. Para que la identificación del sistema sea exitosa es necesario que las entradas al sistema durante la recogida de datos exciten en el sistema las frecuencias deseadas. Esto se puede alcanzar provocando pequeños cambios de altura y de giros en el avión durante el vuelo.(Martínez 2009) Los datos resultantes se almacenan en tierra y se procesan para ser utilizados para la identificación. Para hacer esto posible es necesario que el hardware esté probado y que el avión esté equipado con todo el hardware necesario. El programa para la recolección de los datos también tiene que ser probado e instalado.(Martínez 2009) Estos datos deben ser analizados con atención y además examinar el contenido frecuencial (espectro) de los mismos.. 2.2.3 Tratamiento de los datos. Se realiza un pre-procesamiento de la señal donde se elimina la media aritmética de los datos obtenidos, que pueden ser erróneos producidos por pérdidas en el canal de comunicación. También se considera conveniente filtrar las frecuencias superiores a los 100 MHz. Además se selecciona una porción de los datos, donde se evidencien las características deseadas en el comportamiento del sistema. Una parte es utilizada en la identificación y otra para la validación.. 2.2.4 Elección de la estructura del modelo. Es la parte que requiere más teoría, donde se modela el proceso y la perturbación. Si no se tiene ninguna idea del posible modelo, se especifican un conjunto de.
(38) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 18. modelos con parámetros ajustables. También se evalúan las posibilidades: lineal o no lineal, SISO o MIMO. En este caso se prefiere un modelo lineal para un sistema MIMO. Para determinar los modelos se recurre a la herramienta de identificación de sistemas del Matlab. Esta será se detallada más adelante.. 2.2.5 Selección del criterio de ajuste del modelo. Se tienen en cuenta criterios como el de minimización numérica y la función de coste. Como se utiliza la herramienta de identificación del Matlab se escoge, en este caso, mínimos cuadrados es la que maneja el software por defecto.. 2.2.6 Cálculo del modelo. Con la ayuda del software, en este caso del Matlab, se cargan los datos para el cálculo y la validación. Se seleccionan los mejores modelos según el criterio de identificación. Finalmente se calculan los parámetros para cada una de las estructuras propuestas.. 2.2.7 Validación de modelo. Se realizan pruebas de veracidad y desempeño, donde se comparan las respuestas, real y simulada, ante distintos tipos de señal de entrada. Se realiza el análisis residual y se evalúa la aplicación del modelo.. 2.2.8 Revisión. Se revisa cada paso del proceso y se buscan fallas en lugar de aciertos.. 2.3 Herramienta de identificación de sistemas del Matlab. La herramienta de identificación de sistemas es un módulo de análisis que contiene útiles para el modelado matemático de sistemas dinámicos, basado en la observación de los datos de entrada y salida. Esta contiene métodos paramétricos y no paramétricos de modelado, asimismo da soporte a muchas clases de.
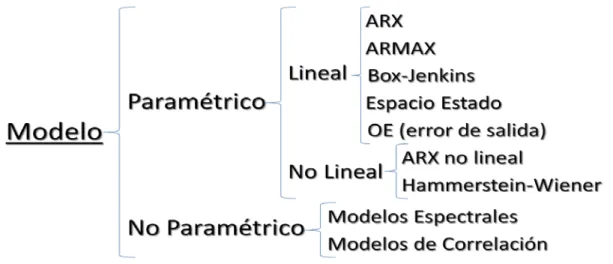
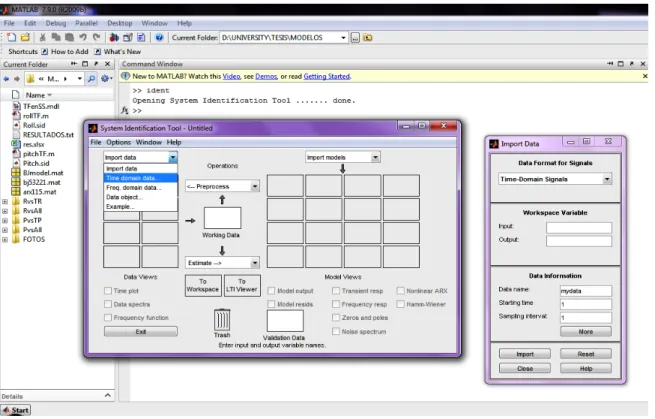
(39) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 19. modelos lineales y no lineales. Además provee un ambiente interactivo para análisis de datos, estimación de modelos y visualización de la respuesta. Usando esta interfaz gráfica, una gran variedad de modelos (Fig 2.3) pueden ser estimados así como sus respuestas visualizadas y comparadas con cada una de las otras. También facilita la estimación de ambos modelos (continuo y discreto), usando datos en uno y otro dominio (tiempo y frecuencia). El formato del modelo depende de la estructura usada para su obtención. Al mismo tiempo brinda soporte a la subselección de energía de entrada y los canales de salida.. Fig 2.3: Modelos de estimación del Matlab. 2.3.1 Cómo acceder a la herramienta de identificación. Se comienza abriendo el Matlab, luego la interfaz gráfica de la herramienta de identificación y se importa el conjunto de datos con lo que se va a trabajar (Fig 2.4). IDENT abre una sesión en blanco del sistema de identificación, si la Interfaz gráfica ya está abierta, muestra la ventana principal de la misma. IDENT (nombre) abre el archivo de sesión (*.sid) seleccionado cargado el archivo en la interfaz gráfica. Este archivo se produce como resultado de salvar una sesión corredora que contiene el círculo de datos, modelos y trasfondos del trazado en uso. Si la interfaz gráfica está abierta, entonces IDENT (nombre) mancomuna los contenidos del archivo nuevo de sesión con los ya presente en la interfaz..
(40) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 20. IDENT (nombre, dirección) deja especificada la ruta para el archivo de sesión si el archivo deseado no está en el directorio de Matlab.. Fig 2.4: Interfaz gráfica de la herramienta de identificación de sistemas del Matlab.. 2.4 Ensayo para la identificación. Se realizó un experimento como el descrito en epígrafe 2.2 de este capítulo, de donde se obtuvo el juego de datos de entrada-salida a utilizar. No se debe manipular la potencia del motor, por lo que este ensayo se realiza con una potencia constante del motor. Se le da un set point al avión y se registran las señales del ángulo de deflexión de los alerones, el elevador y el timón de cola con relación a sus respectivos ejes, además del ángulo de cabeceo, el de alabeo y el de guiñada con comparación al centro de masa del avión. El tiempo de muestreo seleccionado fue de 0.02 segundos, el hardware utilizado posee un microprocesador DSPIC30F4013 y el elemento de medición a bordo del avión es una Unidad de Medición Inercial, específicamente la IMU MTI-G..
(41) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 21. En este caso solo se trabajará con las señales referentes al cabeceo (deflexión en el elevador y ángulo de cabeceo) y al alabeo (deflexión en los alerones y ángulo de alabeo). A continuación se muestran los valores obtenidos durante el vuelo real para el movimiento longitudinal (Fig 2.5) y para el movimiento lateral (Fig 2.6).. Fig 2.5: Movimiento longitudinal, señales de entrada (azul) y salida (rojo).. Fig 2.6: Movimiento lateral, señales de entrada (azul) y salida (rojo). Para evaluar el comportamiento de los modelos cualitativamente se emplea el índice FIT, el cual se calcula como:. Donde:. 𝐹𝐼𝑇 = 100. 1 − 𝑛𝑜𝑟𝑚𝑎(𝑌 − Ŷ) , 𝑒𝑛 % 𝑛𝑜𝑟𝑚𝑎(𝑌 − 𝑚𝑒𝑑𝑖𝑎(𝑌)).
(42) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 22. 𝑌: vector de los datos de validación Ŷ: vector de las salidas del modelo. 2.4.1 Modelo longitudinal.. Para la identificación del sistema se realiza la selección de mil muestras, las comprendidas en el intervalo de 0 a 1000. A estas se le realiza el preprocesamiento y es a partir de esos datos que se determina el modelo. Se escogen los tres mejores modelos según el índice FIT y se comparan de acuerdo al valor de la función de pérdida (Tabla 2.1): Modelo. FIT (%). Función de pérdida. BJ-53221. 54.94. 0.512106. OE-321. 52.14. 4.37252. BJ-31111. 41.08. 0.757014. Tabla 2.1: Modelos longitudinales.. 2.4.2 Modelo lateral. Para la identificación del sistema se realiza la selección de mil muestras, en este caso en el intervalos de 4000 a 5000. A estas se le realiza el pre-procesamiento y es a partir de esos datos que se determina el modelo. Se escogen los tres modelos con mejor índice FIT y se comparan de acuerdo al valor de la función de pérdida (Tabla 2.2): Modelo. FIT (%). Función de pérdida. ARX-115. 78.44. 0.232076. ARMAX-1115. 77.9. 0.227812. BJ-11135. 70.06. 0.311182. Tabla 2.2: Modelos laterales..
(43) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 23. 2.5 Métodos estadísticos. Para la comprobación de los modelos obtenidos se emplea el análisis residual, ya que la propia herramienta de identificación del Matlab brinda estas gráficas. Este consta de dos pruebas estadísticas para determinar la validez de los modelos: la autocorrelación de residuos de la salida y la correlación cruzada de los residuos entre la entrada y la salida.. 2.5.1 Autocorrelación. La autocorrelación es una herramienta matemática utilizada frecuentemente en el procesamiento de señales. La función de autocorrelación se define como la correlación cruzada de la señal consigo misma. Resulta de gran utilidad para encontrar patrones repetitivos dentro de una señal, como por ejemplo, la periodicidad de una señal enmascarada bajo el ruido o para identificar la frecuencia fundamental de una señal que no contiene dicha componente, pero aparecen numerosas frecuencias armónicas de esta.. 2.5.2 Correlación cruzada. En procesamiento de señales, la correlación cruzada (o denominada "covarianza cruzada") es una medida de la similitud entre dos señales, frecuentemente usada para encontrar características relevantes en una señal desconocida por medio de la comparación con otra que sí se conoce. Es función del tiempo relativo entre las señales, a veces también se la llama producto escalar desplazado, y tiene aplicaciones en el reconocimiento de patrones y en criptoanálisis.. 2.6 Consideraciones finales del capítulo. En este capítulo se describió el proceso de identificación y la herramienta utilizada en la obtención del modelo empírico que será descrito en el próximo capítulo. Además se expuso el ensayo realizado para la identificación del UAV, y los principales ajustes realizados. Se seleccionaron tres modelos para cada movimiento, longitudinal y lateral, de los cuales se mostró una comparación en.
(44) CAPÍTULO 2. MÉTODOS Y HERRAMIENTAS PARA LA IDENTIFICACIÓN EXPERIMENTAL Y LA VALIDACIÓN. 24. relación al índice FIT y el valor de la función de pérdida como elementos fundamentales para su posterior elección. Finalmente se explicó en qué consisten los métodos estadísticos que serán utilizaran para la validación de los modelos obtenidos..
(45)
(46) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 25. CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. En este capítulo se selecciona el mejor modelo para la identificación del UAV. Asimismo se expresan los resultados de la validación, mediante la comparación con la ayuda de modelos estadísticos, de la efectividad del método y la calidad del producto. También se realiza un breve análisis económico sobre los beneficios que. aporta. la. identificación. experimental. a. este. tipo de. proyectos. y. específicamente en este caso en particular.. 3.1 Modelo longitudinal. Se decide utilizar el modelo BJ-53221(Fig 3.1), pues además de ser el de mayor índice FIT presenta la menor función de pérdida. La ecuación para este tipo de modelo es la siguiente: 𝑦(𝑡) = [𝐵/𝐹](𝑧) ∗ 𝑢(𝑡) + [𝐶/𝐷](𝑧) ∗ 𝑒(𝑡). Donde: B= F=. 0 �0 0 1 �1 1. C = [1 D=. [1. −0.4121 −0.7075 0 −1.8381 −1.8782 0.5287. 0.8462 −0.2062 −0.5533 0.3254 1.4808 −1.0503 0.5344 −0.2593� 0 0 0 0 0.8381 0.8803� 0.583. −0.7656 −0.0167 0.1391] −1.5796 0.5917].
(47) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. Resultando las funciones de transferencia de la siguiente forma: 𝑃1 = 𝑃2 = 𝑃3 = 𝑃4 =. 0.1593𝑠 5 + 140.4𝑠 4 − 1.534 ∗ 104 𝑠 3 + 1.174 ∗ 104 𝑠 2 − 4.106 ∗ 106 𝑠 + 6.088 ∗ 104 𝑠 5 + 308.8𝑠 4 + 3.264 ∗ 104 𝑠 3 + 1.264 ∗ 106 𝑠 2 + 8.809 ∗ 106 𝑠 + 961.7 1.072𝑠 5 − 9.372𝑠 4 + 29.96𝑠 3 − 1.01 ∗ 106 𝑠 2 + 2.861 ∗ 106 𝑠 − 3.2118 ∗ 105 𝑠 5 + 306.4𝑠 4 + 3.192 ∗ 104 𝑠 3 + 1.193 ∗ 106 𝑠 2 + 6.534 ∗ 106 𝑠 + 5.503 ∗ 106. −3.166 ∗ 10−16 𝑠 5 − 4.157 ∗ 10−13 𝑠 4 − 1.208 ∗ 10−11 𝑠 3 − 2.839 ∗ 10−10 𝑠 2 +2.414 ∗ 10−7 𝑠 − 3.552 ∗ 10−5 𝑠 5 + 379.1𝑠 4 + 7.376 ∗ 104 𝑠 3 + 9.382 ∗ 106 𝑠 2 + 6.8 ∗ 108 𝑠 + 2.003 ∗ 1010. 0.3633 ∗ 𝑠 3 + 94.76𝑠 2 + 4138𝑠 + 8.049 ∗ 104 𝑠 3 + 125.7𝑠 2 + 2613𝑠 + 3825. Donde:. P1 : Ángulo de cabeceo contra deflexión en los alerones P2 : Ángulo de cabeceo contra deflexión en el elevador. P3 : Ángulo de cabeceo contra deflexión en el timón de cola. 𝑃4 : Ángulo de cabeceo contra señal de ruido. Fig 3.1: Salida real (negro) y del modelo simulado (rojo) para el cabeceo.. 26.
(48) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 27. 3.1.1 Análisis de autocorrelación de residuos. La autocorrelación de residuos del ángulo de cabeceo (Fig 3.2) escasamente alcanza a salirse de sus límites, lo que implica que el modelo es capaz de explicar casi todas las dinámicas del modelo real. Además se observa que existe simetría, como es de esperarse, por las propiedades de autocorrelación.. Fig 3.2: Autocorrelación de residuos del ángulo de cabeceo.. 3.1.2 Análisis de correlación cruzada. La correlación cruzada de los residuos entre el ángulo de cabeceo y el de la deflexión en el elevador (Fig 3.3) se comporta satisfactoriamente, no se sale de sus límites y alcanza un valor pico en un punto cercano a cero que es cuando se espera el valor más alto.. Fig 3.3: Correlación cruzada del ángulo de cabeceo y el del elevador..
(49) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 28. 3.2 Modelo lateral. En este caso se opta por el modelo ARX-115 (Fig 3.4); que es de mayor índice FIT y aunque su función de pérdida es ligeramente mayor que la del ARMAX-1115, el seleccionado presenta menor complejidad en su estructura. La ecuación del modelo escogido es la siguiente: 𝐴(𝑧) ∗ 𝑦(𝑡) = 𝐵(𝑧) ∗ 𝑢(𝑡) + 𝑒(𝑡). Donde: 𝐴 = [1. 0 𝐵 = �0 0. −1.0023] 0 0 0 0 0 0. 0 0 0. 0 0 0. 0.1386 0.0017� 0. Teniendo que las funciones de transferencia son las siguientes: 𝑅1 = 𝑅2 =. −0.0692𝑠 5 + 34.6𝑠 4 − 6920𝑠 3 + 6.92 ∗ 105 𝑠 2 − 3.46 ∗ 107 𝑠 + 6.92 ∗ 108 𝑠 5 + 399.9𝑠 4 + 5.995 ∗ 104 𝑠 3 + 3.993 ∗ 106 𝑠 2 + 9.954 ∗ 107 𝑠 − 1.157 ∗ 107. −8.48 ∗ 10−4 𝑠 5 + 0.424𝑠 4 − 84.8𝑠 3 + 8480𝑠 2 − 4.24 ∗ 105 𝑠 + 8.48 ∗ 105 𝑠 5 + 399.9𝑠 4 + 5.995 ∗ 104 𝑠 3 + 3.993 ∗ 106 𝑠 2 + 9.954 ∗ 107 𝑠 − 1.157 ∗ 107. 𝑅3 = 0 𝑅4 =. 0.2428𝑠 + 24.28 𝑠 − 0.1157. Donde:. R1 : Ángulo de alabeo contra deflexión en los alerones. 𝑅2 : Ángulo de alabeo contra deflexión en el elevador. 𝑅3 : Ángulo de alabeo contra deflexión en el timón de cola R 4 : Ángulo de alabeo contra señal de ruido.
(50) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 29. Fig 3.4: Salida real (negro) y del modelo simulado (verde) para el alabeo.. 3.2.1 Análisis de autocorrelación de residuos. La autocorrelación de residuos del ángulo de alabeo (Fig 3.5) se alcanza a salir de sus límites, lo que implica que el modelo no es capaz de explicar algunas dinámicas del modelo real. También se puede observar que hay una cierta simetría por las propiedades de autocorrelación.. Fig 3.5: Autocorrelación de residuos del ángulo de alabeo..
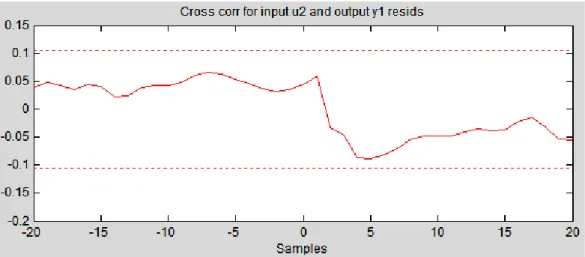
(51) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 30. 3.2.2 Análisis de correlación cruzada. La autocorrelación cruzada de los residuos entre el ángulo de alabeo y el de la deflexión en los alerones (Fig 3.6) se comporta de manera satisfactoria ya que no se sale de sus límites. Aunque no alcanza su máximo valor en un punto cercano a cero como debe ser, si existe un pico de valor en esta zona.. Fig 3.6: Correlación cruzada del ángulo de alabeo y el de los alerones.. 3.3 Análisis económico Los UAV están valorados entre los 30 000 dólares estadounidenses (USD) y los 15 millones; dependiendo del tamaño del vehículo, los sensores y equipos instalados, su capacidad de carga útil y autonomía. En algunos casos se comercializa el vehículo de manera conjunta con el autopiloto y en otros solamente el autopiloto que puede costar 15 000 USD. En caso de avería u otra dificultad, no se podrá acceder a la información necesaria para reparar el UAV, lo que aumenta el valor agregado del vehículo. Se pueden mencionar además el costo de mantener volando durante una hora las avionetas utilizadas para la agricultura, los aviones o helicópteros para las tareas de vigilancia de las costas y la supervisión de los ecosistemas de playas, estas son de aproximadamente 400 CUC en el primer caso, mientras que las dos.
(52) CAPÍTULO 3. RESULTADOS DE LA IDENTIFICACIÓN Y LA VALIDACIÓN. 31. últimas están valoradas en 20 000 CUC cada una. Sin embargo los pequeños aviones no tripulados pueden sustituirlas eficazmente costando menos de 20 CUC y 6 000 CUC como inversión primaria, respectivamente. El costo por criterio de combustible y reparaciones es muy pequeño comparado con los vehículos de gran escala. El CV10CT es un vehículo de bajo costo, construido por los especialistas del centro Mecatronic el cual tiene un costo de producción menor de los 1 000 dólares. Todo el equipamiento de hardware y sensores instalados clasifican en la gama baja que proporcionan los fabricantes, donde por ejemplo la IMU MTI-G de Xsens que está valorado en 5069 USD no se compara con sensores utilizados en otros UAV que pueden costar 100 000 dólares.. 3.4 Consideraciones finales del capítulo En este capítulo ha quedado explícita la estructura final para el modelo empírico tanto lateral como longitudinal. Se han expuesto los valores de los parámetros que componen cada modelo, así como las funciones de transferencias referentes a las respectivas salidas de ambos. También se utilizaron criterios estadísticos para la comprobación de dichos modelos. Por último se realizó un análisis estadístico referente al uso de los UAV y los beneficios que representa su actual desarrollo en el país..
(53)
(54) CONCLUSIONES Y RECOMENDACIONES. 32. CONCLUSIONES Y RECOMENDACIONES. Conclusiones Los UAV son muy utilizados actualmente y presumen grandes ventajas basándose en sus aplicaciones y bajo costo de fabricación. Por esta razón son un campo de exploración importante y constituyen un área de investigación en constante desarrollo. Este trabajo ha constituido un progreso en la identificación experimental de UAV. De los resultados alcanzados a lo largo del mismo, se puede arribar a las siguientes conclusiones: La identificación experimental además de ser un método efectivo en la validación de los modelos analíticos, provee prototipos que pueden ajustarse fielmente a la respuesta real del sistema según sea el caso. Para el modelo lateral se obtuvo un mejor ajuste del índice FIT que para el longitudinal. El análisis de residuos del modelo longitudinal arrojó mejores resultados que el del canal lateral. El uso de pequeños aviones no tripulados en sustitución de los convencionales para determinadas tareas tiene como gran ventaja el ahorro por sustitución de importaciones de técnicas costosas incluso a países desarrollados..
(55) CONCLUSIONES Y RECOMENDACIONES. 33. Recomendaciones Luego. de. establecidas. las. conclusiones,. se. plantean. las. siguientes. recomendaciones: Tomar esta investigación como punto de partida para posteriores trabajos relacionados con UAV. Continuar con el estudio de otras alternativas de modelado experimental, tanto lineal como no lineal, para mejorar las respuestas obtenidas. Profundizar en el trabajo con otros métodos estadísticos para la validación de los modelos empíricos. Comprobar los modelos obtenidos utilizando datos tomados de otras pruebas de vuelo..
(56) REFEReNCIAS BIBLIOGRÁFICAS.
(57) REFERENCIAS BIBLIOGRÁFICAS. 34. REFERENCIAS BIBLIOGRÁFICAS. Adiprawita, W., A. S. Ahmad, et al. (2007). "Automated Flight Test and System Identification for Rotary Wing Small Aerial Platform using Frequency Responses Analysis.". Ali Salman, S., A. G. Sreenatha, et al. (2006). "Attitude dynamics identification of unmanned aircraft vehicle." International Journal of Control, Automation, and Systems 4: 782-787.. Allen, M. J., J. Ryan, et al. (2002). "String Stability of a Linear Formation Flight Control System.". Arranz, J. M. and M. M. Zamora (2002). "Análisis de autocorrelación.". Bennani, S. and G. Looye (2000). "Flight Control Law Design for a Civil Aircraft using Robust Dynamic Inversion.". Castaño, E. and J. Martínez (2008). Uso de la función de correlación cruzada en la identificación de modelos ARMA. Revista colombiana de estadistica. 31: 293310..
(58) REFERENCIAS BIBLIOGRÁFICAS. 35. Gallego, J. L. (2008). Autocorrelación. Apuntes de Econometría. LADE y LE.. Grankvist, H. (2006). "Autopilot Design and Path Planning for UAV.". Hoburg, W. and R. Tedrake (2010). "System Identification of Post Stall Aerodynamics for UAV Perching.". Hu, C., X. Huang, et al. (2001). "System identification of a small UAV’s speeding up process before take-off.". Jategaonkar, R. V. and F. Thielecke (2000). "Aircraft parameter estimation - A tool for development of aerodynamic databases.". Jorgen, H., M. K. Agesen, et al. (2008). "Outback Rescue Challenge.". King, E. T. (2002). "Distributed Coordination and Control Experiments on a MultiUAV Testbed.". Lancaster, R. (2004). "Formation flight autopilot design for the GAF Jindivik Mk 4A UAV.". Lee, K. (2004). "Development of Unmanned Aerial Vehicle (UAV) for wildlife surveillance.". Lee, R. and L. Shen (2007). "System identification of Cessna 182 model UAV.".
(59) REFERENCIAS BIBLIOGRÁFICAS. 36. Manaï, M., A. Desbiens, et al. (2003). "Identification of a UAV and desing of a hardware in the loop system for nonlinear control purposes.". Martínez, B. L., L. M. Pineda, et al. (2012). Identificación de un vehículo aéreo no tripulado. RIELAC. XXXIII: 45-55.. Martínez, J. (2007). "Uso de la función de correlación cruzada en la identificación de modelos para series de tiempo estacionarias y no estacionarias.". Martínez, M. E. (2009). Desarrollo de sistemas de control para autopiloto de avión de pequeño porte. Departamento de Automática y Sistemas Computacionales. Santa Clara, Universidad Central "Marta Abreu" de Las Villas.. Pamadi, B. N. (2003). Performance, Stability, Dynamics, and Control of Airplanes, American Institute of Aeronautics and Astronautics.. Pineda, L. M. (2008). Modelo Matemático de un avión autónomo. Departamento de Automática y Sistemas Computacionales. Santa Clara, Universidad Central "Marta Abreu" de Las Villas.. Pineda, L. M. (2011). Control de vehículo aéreo autónomo basado en modelo dinámico. Departamento de Automática y Sistemas Computacionales. Santa Clara, Universidad Central "Marta Abreu" de Las Villas.. Soon, J. and C. J. Tomilicin (2003). "Longitudinal Stability Augmentation System Design for the Dragon Fly UAV Using a Single GPS Receiver.".
(60) REFERENCIAS BIBLIOGRÁFICAS. Sorensen, B. V., S. H. Hansen, et al. (2005). "Autonomous Model Airplane.". 37.
(61)
Figure


+7


Outline
Documento similar
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
