Manual de prácticas de laboratorio de la disciplina Accionamiento Eléctrico
151
0
0
Texto completo
(2) RESUMEN El presente trabajo se dedicó a conformar un manual con prácticas de laboratorio de la disciplina de Accionamiento Eléctrico, que facilite el trabajo de profesores y alumnos. Esta disciplina cuenta con una amplia gama de prácticas de laboratorio concebidas en su plan de estudio, las cuales, en muchas ocasiones no se pueden impartir debido a las condiciones materiales de nuestros locales y la carencia de equipos y dispositivos adecuados a este propósito. Por ello este trabajo reúne nueve prácticas las cuales se ajustan a las condiciones materiales y técnicas actualmente existentes en nuestra Facultad..
(3) ÍNDICE INTRODUCCIÓN ----------------------------------------------------------------------- 1 CAPÍTULO I. Prácticas de laboratorio de accionamiento Eléctrico I ------------. 3. ¾ Práctica 1 Determinación de las características mecánicas en los cuatro cuadrantes del motor asincrónico de rotor bobinado ----------------------- 3 ¾ Práctica 2 Determinación de la potencia nominal en los motores Eléctricos ------------------------------------------------------------------------ 16 ¾ Práctica 3 Control de velocidad de los motores de CD por voltaje de armadura ------------------------------------------------------------------------. 30. ¾ Práctica 4 Control de velocidad de motores asincrónicos -----------------. 42. ¾ Práctica 5 Dispositivos para la instalación y protección de motores eléctrico ------------------------------------------------------------------------- 58 ¾ Práctica 6 Circuitos típicos utilizados en algunas aplicaciones de los accionamientos eléctricos ----------------------------------------------------- 65 CAPÍTULO II. Prácticas de laboratorio de Accionamiento Eléctrico II ---------- 70 ¾ Práctica 7 Autómata programable S5-95U ---------------------------------- 70 ¾ Práctica 8 Simulación de un sistema rectificador a tiristores – motor de corriente directa (CT-MCD) regulación de velocidad automática----- 83 ¾ Práctica 9 Operación a lazo cerrado del sistema rectificador controlado - motor de corriente directa ------------------------------------- 100 CONCLUSIONES ----------------------------------------------------------------------. 104. RECOMENDACIONES ---------------------------------------------------------------- 105 REFERNCIAS BIBLIOGRÁFICAS ------------------------------------------------- 106 BIBLIOGRAFÍA ------------------------------------------------------------------------ 107 ANEXO 1 -------------------------------------------------------------------------------- 109 ANEXO 2 -------------------------------------------------------------------------------. 127.
(4) INTRODUCCIÓN La disciplina de Accionamiento Eléctrico es de fundamental importancia en la formación del ingeniero electricista y forma parte también de los planes de estudio de otras especialidades de la educación media y superior. Las prácticas de laboratorio son de vital importancia en el desarrollo de esta disciplina pues permite al estudiante obtener una visión general de lo que después, puede ser su futuro contenido de trabajo. Además, se hacía necesario actualizar e introducir. mejoras en las prácticas de. laboratorio que tradicionalmente se impartían en la facultad. Teniendo en cuenta esto, se ha elaborado el. presente trabajo, el cual tiene como objetivo conformar un grupo de. prácticas de laboratorio de la disciplina de Accionamiento Eléctrico, para que sea utilizado por todos aquellos que cursen o impartan dicha disciplina. Para lograr este objetivo se realizaron las siguientes tareas 1. Búsqueda bibliográfica basada fundamentalmente en la revisión de diversos folletos de prácticas de laboratorios existentes 2. Selección de las prácticas de laboratorio a realizar sobre la base de las condiciones objetivas existentes en nuestros locales De acuerdo con lo anteriormente expuesto, el presente trabajo posee la siguiente estructura: 9 Capítulo 1 “Prácticas de laboratorio de Accionamiento Eléctrico I”. El mismo agrupa las prácticas sobres las componentes utilizados en los accionamientos eléctricos, sus características, sus parámetros más importantes y algunos accionamientos en lazo abierto típicos utilizados. Este capítulo consta de seis prácticas numeradas por el orden en que se imparte la asignatura y son las que relacionan a continuación: Práctica 1 “Determinación de las características mecánicas en los cuatro cuadrantes del motor sincrónico de rotor bobinado” Práctica 2 “Determinación de la potencia nominal de los motores eléctricos” Práctica 3 “Control de velocidad de los motores de CD por voltaje de armadura” Práctica 4 “Control de velocidad de motores asincrónicos” Práctica 5 “Dispositivos para la instalación de y protección de motores eléctricos”.
(5) •. Práctica 6 “Circuitos típicos utilizados en. algunas aplicaciones de los. accionamientos eléctricos” 9 Capítulo 2 “Prácticas de laboratorio de Accionamiento Eléctrico II”. En él se abordan los puntos fundamentales de la automatización de los accionamientos en lazo cerrado así como la regulación automática de la velocidad en los motores de corriente directa. Consta de las siguientes tres prácticas, las que están enumeradas a continuación de las anteriores y se presentan acorde con el desarrollo de la asignatura: Practica 7 “Autómata programable S5-95U” Práctica 8 “Simulación de un sistema rectificador tiristores – motor de corriente directa (CT-MCD) de regulación de velocidad automática” Práctica 9 “Operación a lazo cerrado del sistema rectificador a tiristores – motor de corriente directa” 9 Anexos donde se puede encontrar la representación de las conexiones utilizadas y los resultados de algunas de las prácticas realizadas Es necesario aclarar que este manual ha sido conformado con las prácticas que se pudieron realizar dado al estado técnico de los laboratorios de nuestra facultad y la carencia de instrumentos adecuados, poniéndose en su realización nuestro máximo empeño..
(6) CAPÍTULO I PRÁCTICAS DE LABORATORIO DE ACCIONAMIENTO ELÉCTRICO I Práctica de laboratorio 1 “Determinación de las características mecánicas en los cuatro cuadrantes del motor asincrónico de rotor bobinado”. Objetivos 1. Determinar experimentalmente las características mecánicas en los cuatro cuadrantes de los motores asincrónicos. 2. Comprobar experimentalmente la validez de las expresiones aproximadas de velocidad-momento del motor asincrónico.. Fundamento Teórico 1. Características mecánicas en los cuatro cuadrantes La determinación de las características mecánicas de los motores eléctricos, o sea, la relación entre la velocidad y el momento o par de fuerza que le corresponde, tiene gran importancia en el diseño y análisis de los sistemas de accionamiento eléctrico. Esta característica, conjuntamente con la similar correspondiente a la carga mecánica acoplada al motor, permiten determinar el punto de operación en estado estable del accionamiento. Si se trazan dos ejes de coordenadas, uno correspondiente a la velocidad y el otro al momento, se tendrán definidos cuatro cuadrantes en los cuales podrá trabajar la máquina, tal como se muestra en la figura 1. A continuación se analizará qué condiciones de operación de la máquina son representadas gráficamente mediante cada uno de los cuatro cuadrantes. Para ello debe establecerse inicialmente un sentido positivo convencional tanto para la velocidad como para el momento. En el primer cuadrante (I), tanto la velocidad como el momento son positivos, como ambos tienen el mismo sentido, la máquina trabaja en este cuadrante como motor girando en el sentido positivo de la velocidad, recibe energía de la red eléctrica y la convierte a la forma mecánica entregándola a la carga o elemento mecánico acoplado a él..
(7) Figura. 1 Cuadrantes donde puede trabajar la máquina En el segundo cuadrante (II), la velocidad es también positiva, o sea, el sentido de rotación del motor es el mismo que en el cuadrante anterior; ahora bien, el momento es en este caso negativo y se opone a la rotación. Esto significa que para que esta se mantenga, la máquina debe recibir energía del elemento mecánico a ella acoplada y esta energía, como es natural, podrá devolverla a la red eléctrica, por tanto, la máquina trabajará en este caso como generador girando en el sentido positivo de la velocidad. Por otra parte, también puede darse el caso de que la máquina reciba energía, tanto del elemento mecánico a ella acoplado como de la red, y esta energía se disipe en la resistencia interna de la misma y se convierta en calor. Esta condición de operación se denomina frenaje. [4] En el tercer cuadrante (III), tanto la velocidad como el momento son negativos. Como están en el mismo sentido, la máquina trabaja aquí como motor; al igual que en el primer cuadrante, la diferencia consiste en que en este caso el sentido de rotación es el que, convencionalmente, fue seleccionado como negativo. En el cuarto cuadrante (IV), al igual que en el segundo, la máquina puede trabajar como generador y en frenaje, pero con sentido de rotación negativo. A continuación se muestra una tabla donde pueden compararse las condiciones de operación en los cuatro cuadrantes. En ella, RED significa la red eléctrica de alimentación, ME la máquina eléctrica y CM la carga mecánica..
(8) Tabla.1 Condiciones de operación en los cuatro cuadrantes Condición de. Cuadrante. w. M. Flujo de energía. I. +. +. RED→ME→CM. Motor. II. +. -. RED←ME←CM. Generador. RED→ME←CM. Frenaje. III. -. -. RED→ME→CM. Motor. IV. -. +. RED←ME←CM. Generador. RED→ME←CM. Frenaje. trabajo. 2. Características del motor asincrónico trifásico en los cuatro cuadrantes En la figura 2 se muestran distintas características típicas de la máquina asincrónica en los cuatro cuadrantes:. Figura.2 Características típicas de la máquina asincrónica en los cuatro cuadrantes La característica (1) corresponde a la obtenida alimentando la máquina con un sistema de voltaje trifásico de secuencia positiva y sin resistencia externa en el circuito del rotor. La (2) se obtiene también con secuencia positiva pero con un valor de resistencia externa en el circuito del rotor. La (1’) y la (2’) son similares a la (1) y a la (2) pero alimentado la máquina con un voltaje de secuencia negativa..
(9) Observando estas características pueden señalarse en ella los siguientes aspectos importantes: • Las características mecánicas del motor poseen una zona de operación. estable. (de. la. velocidad. sincrónica. ws. a. la. correspondiente al momento máximo wcr ) y otra inestable (de wcr a 0) •. Existe un valor de momento máximo, que es mayor en la zona generadora que en la motora. •. Al aumentarse la resistencia externa en el circuito del rotor el momento máximo no varia pero la velocidad a la cual ocurre este momento máximo ( wcr ) disminuye, aumentando, por tanto, el deslizamiento para el momento máximo. [2]. 3. Cálculo de la característica mecánica La expresión general del momento en función del deslizamiento del motor asincrónico es la siguiente: M =. 3 ⋅ V f ⋅ R2 ' ⎡⎛ R ws ⋅ ⎢⎜⎜ R1 + 2 s ⎢⎣⎝. 2. '. ⎞ ⎟⎟ + X 1 + X ' 2 ⎠. (. ). 2. ⎤ ⎥⋅s ⎥⎦. (1). donde:. V f : la tensión de fase aplicada al motor '. R2 : la resistencia total del circuito del rotor referida al estator R1 : la resistencia del estator '. X 2 : la reactancia de dispersión del rotor referida al estator X 1 :la reactancia de dispersión del estator s : deslizamiento. Con la ecuación (1) y la siguiente:. s = ( ws − w) ws donde:. ws : velocidad sincrónica w : velocidad del motor. (2).
(10) puede determinarse la característica mecánica en los cuatro cuadrantes. El valor del deslizamiento al que existe el momento máximo esta dado por: s cr = ±. R2. 2. '. (. R1 + X 1 + X 2. (3). ). ' 2. Y el momento máximo esta dado por:. M máx =. 3 ⋅V f. 2. (. (4). ). ' 2 2 ⋅ ws ⎡⎢ R1 + R1 ± X 1 + X 2 ⎤⎥ ⎣ ⎦. el signo (+) corresponde a la operación como motor y el (–) a la operación generadora. Combinando (1), (3), (4) se obtiene la siguiente expresión para el momento en función del deslizamiento: M =. 2 ⋅ M máx (1 + a ⋅ s cr ) s s cr + + 2 ⋅ a ⋅ s cr s cr s. (5). donde: a=. R1 R2. (6). '. Cuando no existe resistencia adicional en el circuito del rotor ocurre que '. R1 ≈ R2 o sea, a = 1 y (5) se convierte en: M =. 2 ⋅ M máx (1 + s cr ) s s cr + + 2 ⋅ s cr s cr s. (7). Si el valor de scr es pequeño pude hacerse la siguiente aproximación: M =. 2 ⋅ M máx s s cr + s cr s. (8). 4. Determinación experimental de la característica mecánica en los cuatro cuadrantes En la figura 3 se muestra el esquema que debe realizarse en el laboratorio a fin de poder determinar las características del motor en los cuatro cuadrantes..
(11) Figura.3 Circuito para determinar las características del motor en los cuatro cuadrantes MA es un motor de prueba que en este caso es asincrónico de rotor bobinado (AL- 306), M1 es una máquina de corriente directa excitada independientemente (AL-506) la cual esta acoplada mecánicamente a él. MAUX es un motor auxiliar que puede ser de cualquier tipo (su regulación de velocidad debe ser buena), en este caso es un motor asincrónico (AL-1106) y M2 es otra máquina de corriente directa (AL-506) acoplada a él. Entre las dos máquinas de corriente directa existe un interruptor tiro S3 contactor magnético (CONT-153) que permite ponerlas en paralelo. Obsérvese que el campo de la máquina M2 es alimentado. a. través. de. un. interruptor. doble. polo-doble. tiro. S1. (CONMUTADOR 3/3) y una resistencia variable. Esto permite excitar esta máquina desde cero hasta su valor máximo en ambos sentidos. En el campo de la otra máquina de corriente directa M1, se encuentra un amperímetro y una resistencia variable. La corriente en el campo de esta máquina debe permanecer fija durante la prueba. Se aprecia también que el amperímetro A2 que mide la corriente entre ambas máquinas de corriente directa está conectado mediante un interruptor S2 (CONMUTADOR 3/3) que permite invertir su conexión en el circuito. Este conjunto de maquina se denomina “agregado de carga” (no incluye la máquina de prueba). [5] La determinación experimental de la característica en los cuatro cuadrantes se lleva a cabo siguiendo los pasos que a continuación se indican: 1. Se arranca la máquina de prueba MA y se lleva a las condiciones de operación deseada (ajustar la resistencia externa del rotor en el valor deseado).
(12) 2. Se ajusta la corriente de excitación de la máquina M1 en el valor dado por el profesor 3. Se arranca el motor auxiliar MAUX y se varía la excitación de la máquina M2 hasta que la polaridad y la magnitud de su voltaje (leídos en V3) coincida con los de la máquina M1 (leídos en V2). En este instante pude cerrarse el interruptor S3. 4. Se aumenta la excitación de M2 de manera que ella trabaje como generador, M1 como motor y la máquina de prueba MA como generador entregando energía a la línea. Este proceso se realiza hasta llegar a la máxima velocidad como generador que se desea obtener. En este punto se leen la velocidad (mediante el tacómetro) y la corriente entre ambas máquinas. Este corresponde. al primer punto de la característica. mecánica. 5. Se disminuye la excitación de M2. y se van tomando valores de. velocidad y corriente que correspondan a otros. puntos de la. característica. Cuando la fem de M2 sea inferior a la de M1 debe invertirse la conexión del amperímetro ya que la corriente de armadura se invierte en ese instante. Cuando la excitación de M2 llega al mínimo, se invierte la polaridad del voltaje aplicado al campo mediante el interruptor S1, esto invierte la fem de M2 y posibilita el trabajo de la máquina que se prueba MA en la zona de frenaje. Para poder determinar el valor del momento electromagnético de la máquina de prueba para cada velocidad es necesario “calibrar” la máquina M1 conjuntamente con la de prueba. Esto consiste primeramente en determinar el valor del coeficiente kφ ( kφ = M Ia ) de la máquina M1 el cual depende de su corriente de excitación y finalmente determinar el momento o corriente de pérdidas de ambas máquinas. Para obtener el valor del coeficiente kφ de la máquina M1 se hace girar esta un determinado valor de velocidad (es aconsejable que sea cercano al nominal), se mide la fem generadora a su corriente de excitación nominal y se calcula kφ mediante la expresión:.
(13) kφ =. Eg w. (9) Donde: Eg : fem generada (V) w : velocidad en rad s. Debe señalarse que este valor de corriente de excitación es el que debe mantenerse constante durante todo el desarrollo de la prueba para determinar la característica en los cuatro cuadrantes. Para determinar el momento de pérdidas de ambas máquinas se utiliza el mismo circuito de la figura 3 pero sin alimentar el motor MA. Se arranca el motor auxiliar MAUX y se va aumentando poco a poco la excitación de la máquina M2 con el interruptor S3 cerrado. Esto hará que el conjunto M1-MA vaya aumentando la velocidad paulatinamente. Se toman lecturas de corrientes y de velocidad y se mantiene la corriente por el amperímetro A3 constante en el valor para el cual se determinó el coeficiente kφ . Esta prueba debe hacerse para los dos sentidos de rotación del conjunto M1-MA. Con estos puntos se traza la característica velocidad – corriente de pérdidas la cual tiene la forma que se muestra en la figura 4.. Figura.4 Características de pérdidas Seguidamente se pasará a explicar el método para determinar el momento electromagnético de la máquina que se prueba para cada valor de velocidad conociendo además, la corriente entre las máquinas M1 y M2, el coeficiente.
(14) kφ de M1 y la característica de pérdida de la forma que aparece en la figura. 4. La sumatoria de los momentos en el eje del conjunto MA-M1 tiene que ser, en estado estable, igual a cero, o sea, debe cumplirse que: M + M1 + M P = 0. (10). donde: M: momento electromagnético de la máquina de prueba. M1: momento electromagnético de la máquina de corriente M1 el cual está dado por la expresión M 1 = kφ ⋅ Ia donde Ia es la corriente leída en el amperímetro A2 en cada punto de la prueba. M P : momento de pérdidas el cual está dado por la expresión M P = kφ ⋅ I P , donde I P es la corriente de pérdidas que se determina, conociendo la velocidad, mediante la. característica de pérdidas (figura 4). Cualquiera de estos tres momentos se considera positivo cuando su sentido coincide con el sentido de la velocidad. El momento electromagnético M1 es positivo cuando la máquina M1 trabaja como motor girando en sentido positivo, por tanto, cuando Ia circula de M2 a M1. El momento de pérdidas se opone siempre a la velocidad, por tanto, será positivo cuando la velocidad sea negativa y viceversa. De acuerdo a esto, el momento electromagnético de la máquina que se prueba puede determinarse mediante la expresión: M = − M 1 − M P = − kφ ⋅ I a − kφ ⋅ I P M = − kφ (I a + I P ). (11). donde I a es positiva cuando va de M2 a M1 y negativa en caso contrario e I P es positiva cuando el sentido de rotación de la máquina es el negativo y viceversa. Por ejemplo, cuando la máquina trabaja en al zona generadora la corriente I a es positiva e I P es negativa y M será negativo (suponiendo I a > I P ). En la zona motora tanto I a como I P son negativas, siendo por tanto positivo el momento electromagnético M. Finalmente en la zona de frenaje I a es negativa e I P es positiva (sentido de rotación se ha invertido). Equipos e instrumentos a utilizar. •. 2 motores de corriente directa AL-506. •. 1 motor asincrónico trifásico de rotor bobinado AL-306.
(15) •. 1 motor asincrónico trifásico de rotor jaula de ardilla AL-1106. •. 1 amperímetro DC (escala 0-5A) (corriente que circula entre ambos motores). •. 1 amperímetro DC (escala 0-2.5A) (corriente de campo del motor M1). •. 1 amperímetro DC (escala 0-5A) (corriente de línea del motor MA). •. 1 voltímetro DC (escala 0-300V) (voltaje terminal del motor M1). •. 1 voltímetro DC (escala 0-300V) (voltaje terminal del motor M2). •. 1 voltímetro AC (escala 0-300V) (voltaje de línea del motor MA). •. 3 contactores magnéticos(CONT-153). •. 3 estaciones de pulsadores (PULSADOR). •. 2 térmicas (RT-311). •. 1 reóstato variable (3300Ω/1000 W, Imáx =0.5A)(campo del motor M1). •. 1 reóstato variable (3300 Ω /1000 W, Imáx =0.5A)(campo del motor M2). •. 1 reóstato variable (470 Ω /1000 W REOSTATO- 3500)(resistencia externa en el circuito del rotor). •. cables de conexiones. Medidas de seguridad. •. No realizar ninguna conexión en el circuito sin la autorización y orientación del profesor. •. No tocar las partes energizadas del circuito. •. Fijar la escala de los instrumentos por encima del valor que se desee medir. •. No golpear ni apoyarse en los instrumentos. •. No energizar hasta que el profesor no haya revisado las conexiones. Técnica operatoria. 1. Montaje del circuito de la figura 3 1.1 montar el circuito de la figura 1 del anexo 1 1.2 montar el circuito de las figuras 2 y 3 del anexo 1 1.3 montar el circuito de control de ambos motores, figura 4 del anexo 1 2. Fijar. en el amperímetro A3 la corriente de excitación para la cual se. calibrará la máquina y se anotará el valor del coeficiente kφ de M1.
(16) 3. Desarrollar la prueba de calibración tomándose puntos para obtener la característica de momento de pérdidas correspondiente. Puede utilizarse la tabla que aparece a continuación. w. Sentido. IP. Positivo. w. Sentido. IP. Negativo. 4. En la obtención de dicha característica se utilizará la función desarrollada en Matlab llamada IP, a la cual se le entran los valores de velocidad y la misma devuelve los valores de corrientes de pérdidas correspondientes. Pero a la hora de utilizar los resultados que devuelve esta función hay que tener en cuenta el signo de la corriente en cuestión. 5. Desarrollar la prueba para determinar las características en los cuatro cuadrantes tal como se explicó anteriormente. Debido a que en la zona de frenaje la corriente es muy alta, esta característica debe llevarse a cabo a voltaje reducido. Para hallar el momento electromagnético a voltaje nominal se hace uso de la siguiente expresión:. ⎛ Vn ⎞ Mvn = Mvr ⎜ ⎟ ⎝ Vr ⎠. 2. (12). donde: Mvn : momento al voltaje nominal Mvr : momento a voltaje reducido. Vn : voltaje nominal Vr : voltaje reducido. 6. Utilizando los datos obtenidos en la prueba, la característica de pérdidas y las. expresiones (11) y (12) se determinará la característica del motor. en los cuatro cuadrantes. Puede hacerse uso de la tabla siguiente: w. Ia. IP. Mvr. Mvn. Condición de operación.
(17) donde: w: velocidad en rpm que se lee en el tacómetro. I a : corriente entre las máquinas (amperímetro A2) I P : corriente de pérdidas (se calcula mediante la característica de. pérdidas) Mvr : momento a tensión reducida (11). Mvn : momento a tensión nominal (12). Informe a presentar. El informe de laboratorio se realizará individualmente en trabajo independiente tomando como base los datos obtenidos durante el desarrollo del laboratorio. Dicho informe deberá contener: 9 Título del laboratorio 9 Objetivos del mismo 9 Desarrollo. •. Esquemas y circuitos empleados. •. Tabulación de los datos. 9 Cálculos representativos 9 Resultados obtenidos 9 Obtener conclusiones.
(18) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Práctica de laboratorio 2 “Determinación de la potencia nominal en los motores eléctricos”. Objetivos. 1. Obtener los gráficos de carga para los diferentes regímenes de trabajo 2. Seleccionar la potencia nominal para cada caso. Fundamento teórico. La debida selección de la potencia de los motores eléctricos tiene una enorme significación para la economía de un país. Una de las exigencias fundamentales planteadas al seleccionar un motor es la confiabilidad de su trabajo con un mínimo de gastos de inversión y explotación. Esta exigencia se garantizará solo si el motor es correctamente seleccionado en cuanto a potencia. El empleo de un motor de potencia insuficiente (menor que la necesaria): -. puede alterar el funcionamiento normal del mecanismo, ya que no cumpliría con los requerimientos tecnológicos que dicho mecanismo impone al accionamiento y se reduciría, por tanto, su productividad. -. se producirían averías. -. se estropearía el motor prematuramente. A su vez, el uso de motores sobredimensionados implica que: -. se eleve el costo inicial del accionamiento eléctrico. -. aumentan las pérdidas de energía debido al descenso de la eficiencia del propio motor. -. en las instalaciones de corriente alterna se empeoraría el factor de potencia. Para llevar a cabo una selección adecuada deben tenerse en cuenta una serie de factores: 9 El sistema de accionamiento eléctrico automatizado: Como es sabido, el tipo de. accionamiento eléctrico a realizar en un caso específico depende, de los requerimientos tecnológicos impuestos por el mecanismo que va a ser accionado. Evidentemente, esto determina el tipo de motor eléctrico que debe ser utilizado y permite obtener información sobre determinadas características del mismo. Por ejemplo, un mecanismo que exija un amplio diapasón de regulación de velocidad con buena gradación, buena eficiencia y una exacta.
(19) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. regulación de sus coordenadas, requiere de un motor de corriente directa (CD) con su respectivo rectificador controlador motor de CD 9 Los regímenes de arranque y frenaje del mecanismo: En el arranque y el frenaje. eléctrico de los accionamientos, las corrientes suelen tomar valores superiores a los nominales. Esto da lugar a que, durante estos procesos, la energía convertida en calor sea superior a la correspondiente en el funcionamiento estacionario. Si el arranque y el frenaje ocurren con poca frecuencia no es necesario considerarlos en la selección de la potencia del motor. Ahora bien, en algunos casos tales como las grúas, los elevadores y otros mecanismos se hace necesario considerar el efecto de estos procesos en el calentamiento de la máquina ya que están sometidos a un régimen de carga que incluye paradas y puestas en marcha frecuentes. 9 Las condiciones de sobrecarga: Algunos mecanismos productivos someten al. motor eléctrico a valores de momento superiores al estacionario por un breve período de tiempo. Es posible que un motor eléctrico sea capaz de suministrar determinado régimen de carga sin que su temperatura se eleve por encima de la máxima pero, que no sea capaz de entregar la sobrecarga que el mecanismo le exige ya que su momento máximo es menor que el de sobrecarga. Para ello, es importante conocer que los motores de CD: tienen un Mmáx limitado a un valor cercano al doble del nominal, este límite se debe a que, a valores superiores, la conmutación se empeora y deteriora las escobillas y el colector. En los motores. asincrónicos de CA: el Mmáx está dado por su característica mecánica y en los motores sincrónicos: el Mmáx depende de las condiciones de excitación a las cuales debe operar. En todos los casos, la elección de la potencia del motor se practica de acuerdo con el calentamiento y, a continuación, se comprueba respecto a su capacidad de sobrecarga (si es capaz de suministrar el momento máximo que requiere el mecanismo) 9 Condiciones ambientales de trabajo: Es de gran importancia para la selección. tener en cuenta las condiciones ambientales en que va a trabajar el motor. Esto se refiere a si será instalado a la intemperie o bajo techo, la temperatura y humedad relativa que debe soportar, la existencia de polvo o determinadas sustancias químicas corrosivas o explosivas. De acuerdo con estas disímiles condiciones de trabajo se fabrican motores cerrados, abiertos, a prueba de explosión, a prueba de goteo, a prueba de salpicadura. Los fabricantes de.
(20) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. motores eléctricos aclaran siempre en sus catálogos las condiciones ambientales en que éstos pueden trabajar. 9 Ubicación física del motor: Es muy importante conocer también dónde será. instalado el motor seleccionado y la forma como este debe acoplarse al mecanismo que accionará, ya que esto determina la forma constructiva. (“frame”) que debe tener. Los fabricantes brindan información en sus catálogos sobre las diferentes formas constructivas en las que fabrican sus motores. Por ejemplo, existen motores verticales y horizontales, con o sin plato soporte. 9 Características del sistema eléctrico: Debe tenerse en cuenta también a la hora. de seleccionar un motor el sistema eléctrico existente en el lugar donde será instalado. Esto se refiere a si existe o no suministro trifásico, los niveles de voltajes, la presencia o no de barras de CD. Esto influye, fundamentalmente en la selección del tipo de motor y sus voltajes nominales 9 La potencia y régimen de carga que requiere el mecanismo: Toda carga. mecánica o mecanismo de producción requiere determinado valor de potencia para poder llevar acabo adecuadamente el proceso tecnológico para el cual fue diseñado. Esta potencia mecánica debe ser suministrada por el motor eléctrico a partir de la potencia eléctrica que recibe de la red. En este proceso de conversión de energía eléctrica a mecánica se producen pérdidas de potencia las cuales se convierten en calor y elevan la temperatura de las diferentes partes de la máquina, siendo particularmente importante el aumento de la temperatura del aislamiento de sus devanados ya que estos tienen una temperatura límite por encima de la cual se deterioran rápidamente y ocurre una disminución de la vida útil del motor o su puesta fuera de servicio. Por otra parte, en muchos mecanismos productivos sucede que la potencia que ellos demandan no siempre es la misma y varía de acuerdo con determinado ciclo de trabajo o, en algunos casos, aleatoriamente. Ante esta situación, el motor eléctrico debe ser seleccionado de forma tal que con el régimen de carga que se le imponga, la temperatura de su aislamiento no sobrepase nunca la máxima permisible y debe cargarse plenamente para asegurar así el cumplimiento del trabajo prefijado por el accionamiento eléctrico. Del mismo modo el motor debe funcionar normalmente en caso de posibles sobrecargas temporales y poseer un par de arranque suficiente para asegurar la duración indispensable del arranque del mecanismo operador.
(21) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. De ahí la importancia de conocer su diagrama de carga, el cual consiste en un gráfico que muestra la variación en el tiempo de la potencia o el momento que demanda el mecanismo. 9 Los indicadores económicos: Teniendo en cuenta todos los aspectos señalados. anteriormente, debe seleccionarse siempre el motor eléctrico que con menos costo inicial da lugar a un menor costo de operación. [9]. Regímenes de carga de los motores eléctricos Los motores pueden ser sometidos a condiciones de operación muy diversas, su carga puede permanecer constante o variar cíclicamente, alternar los períodos de trabajo con los de pausa e inclusive tener un carácter completamente aleatorio. Esto influye en el calentamiento y elevación de la temperatura de la máquina y debe tenerse en cuenta en su selección. Con el objetivo de normalizar los regímenes de trabajo a los cuales puede ser sometido un motor y simplificar los cálculos en la selección de estas máquinas se definen tres regímenes de trabajo en los motores eléctricos: 1. Régimen o servicio continuo: Período de trabajo tan grande que la temperatura del motor alcanza su valor estable. Como ejemplo pueden citarse: algunos motores de los ventiladores y compresores, bombas de alimentar las calderas, grupos motor-generadores, que trabajan ininterrumpidamente mucho tiempo y los períodos de trabajo se miden por horas e incluso por días enteros. La gráfica de trabajo simplificada para este régimen se representa en la siguiente figura:. Figura. 1 Diagramas de carga de régimen continuo a) Para carga constante. b) Para carga continua pero variable. 2. Régimen de trabajo intermitente periódico: Se alternan períodos de trabajo y períodos de pausa de forma tal que, durante los períodos de trabajo la temperatura del motor no llega a alcanzar su valor estable τ SS y durante los.
(22) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. períodos de pausa el motor no llega a enfriarse a la temperatura ambiente. En la figura 2 se muestra un diagrama de carga simplificado de este régimen con línea continua y con línea discontinua la variación de temperatura del motor en este caso. Un ejemplo típico de estos accionamientos son las grúas, elevadores.. Figura. 2 Diagrama de carga de régimen intermitente periódico Analizando la figura anterior se comprende que un motor eléctrico diseñado para entregar de forma continua la potencia que pide esta carga, trabajando en régimen intermitente se encuentra subutilizado ya que nunca llegaría a alcanzar su incremento de temperatura máximo τ SS . En este caso puede trabajarse con un motor cuya temperatura máxima permisible sea τ max . De acuerdo con esto se fabrican motores especialmente diseñados para trabajar en este régimen de trabajo, en ellos es necesario definir el denominado factor de servicio, factor de régimen o. coeficiente de continuidad de conexión ξ , el cual queda expresado en tanto por ciento y es igual a: %ξ =. tt t ⋅ 100 = t ⋅ 100 tt + to tc. (1). donde:. t t : tiempo de trabajo t p : tiempo de pausa o de vacío t c : tiempo de ciclo Los valores en tanto por ciento del factor de régimen normado y para los cuales se fabrican motores de régimen intermitente son: el 15%, el 25%, el 40% y el 60%.. Régimen de trabajo temporal o de corta duración: La alternancia de los períodos de trabajo y de vacío es tal que, en el trabajo la temperatura no llega a alcanzar su valor.
(23) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. estable y en el de pausa se enfría a la temperatura ambiente. En la figura 3 se muestra con línea continua el diagrama de carga simplificado de este régimen y con línea discontinua su variación de temperatura. También se fabrican motores para trabajar con este régimen en los cuales se especifica la potencia y el tiempo de trabajo permisible el cual está normado en 15, 30 o 60 minutos. Como ejemplos de mecanismos que someten al motor a un régimen temporal pueden señalarse algunas mesas giratorias, puentes móviles, donde la pausa en el trabajo es considerablemente mayor que la duración del período de trabajo.. Figura. 3 Diagrama de carga de régimen de corta duración Es necesario señalar que, aunque los análisis de calentamiento se hacen tomando como base la elevación de la temperatura con respecto a la del ambiente, lo que determina realmente las condiciones del aislamiento es el valor absoluto de la temperatura, o sea, la suma de la del ambiente y la elevación de temperatura provocada por las pérdidas. Por tanto, se define una temperatura ambiente normalizada la cual es de 40ºC en la mayoría de las normas eléctricas y de 35ºC en otras. La potencia del motor, indicada en su tablero, corresponde a dicha temperatura. A una temperatura considerablemente más baja que la normalizada, el motor puede cargarse algo más de la potencia nominal y a una temperatura más alta, conviene disminuir la carga del motor, si no se toman medidas para intensificar el enfriamiento del mismo. El método de la corriente equivalente se basa en suponer que la corriente variable del motor puede sustituirse por un valor equivalente de corriente Ieq que produce las mismas pérdidas y se calcula como:. Ieq =. I 12 t1 + I 22 t 2 + ..... + I n2 t n kt 0 + t1 + t 2 + ... + t n. (2). Este método presenta el inconveniente de necesitar el conocimiento de la corriente que tomaría el motor aún no seleccionado con la carga del mecanismo a accionar. Se utiliza.
(24) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. fundamentalmente cuando el diagrama de carga del mecanismo se obtiene acoplándose un motor de prueba del mismo tipo que el posteriormente seleccionado, ya que en este caso el diagrama de carga se obtiene directamente en corriente. La corriente nominal del motor debe ser igual o ligeramente superior a la equivalente. Después de seleccionado el motor por calentamiento debe chequearse por sobrecarga, o sea, comprobar que la corriente máxima que tomará en el ciclo de trabajo es menor que la corriente máxima que puede suministrar el motor seleccionado. Tendiendo en cuenta que para flujo constante el momento es directamente proporcional a la corriente, se aplica en estos casos el método denominado del momento equivalente en el cual se utiliza la expresión siguiente para el cálculo del momento equivalente: M 12 t1 + M 22 t 2 + ..... + M n2 t n kt 0 + t1 + t 2 + ... + t n. Meq =. (3). Este método tiene la ventaja que el momento de la carga puede ser determinado a partir del mecanismo a accionar sin necesidad de hacer selección tentativa del motor o acoplar un motor de prueba al mecanismo. Por ejemplo, haciendo uso del Alecop, esto se puede lograr acoplando al motor un freno de polvo magnético al cual se conecta un módulo Medida N.m.- 3000, del que se lee el momento suministrado por el motor para cada estado de carga. Cuando la velocidad de la carga no varía apreciablemente por ejemplo, en motores de jaula de propósito general, la potencia puede considerarse directamente proporcional al momento y aplicar el método de la potencia equivalente para el cual se aplica la siguiente expresión: Peq =. P12 t1 + P22 t 2 + ..... + Pn2 t n kt 0 + t1 + t 2 + ... + t n. (4). donde: Ieq, Peq y Meq: corriente, momento o potencia equivalente. k: representa las pérdidas constantes (de fricción y batimiento) y puede tomar los siguientes valores: Para régimen intermitente y de corta duración: k=0 Para régimen continuo: k = 1 durante t0 el motor está funcionando k = 1/3 durante t0 el motor está detenido y, además, su carcasa es abierta..
(25) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I k = 1/4 durante t0 el motor está parado, y su carcasa es cerrada. [2]. Para poder aplicar las fórmulas anteriores se necesita haber aproximado el diagrama de carga a valores de corriente, momento o potencia constantes, es por eso que en el caso de que el diagrama tenga tramos inclinados se necesita aplicar en estos tramos, primeramente, la expresión (5): I 12 =. I 12 + I 1 I 2 + I 22 3. (5). Teniendo en cuenta todo lo anterior y después de haber decidido el método a utilizar se deberá seguirse el siguiente diagrama de bloques:. Figura. 4 Diagrama de bloques para seleccionar adecuadamente un motor eléctrico. λ = 1,25 ⋅. λ ' = 1,5 ⋅. I max M P = 1,25 ⋅ max = 1,25 ⋅ max I nom M nom Pnom. (6). I arr M P = 1,25 ⋅ arr = 1,25 ⋅ arr I nom M nom Pnom. (7). λ: (Condición de corriente máxima) y λ’/Condición de corriente de arranque). Tabla 1 Valores de λ y λ’ para motores eléctricos Tipo de motor. λ. λ’. Shunt CD. 2. 2-2,5.
(26) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Tabla.1 (Continuación) Compuesto CD. 3. 2,5-3. Serie CD. 4. 2-2,5. Sincrónico. 2-3. 0,5-1,5. Rotor bobinado. 1,8-2,5. 2-2,5. Jaula A. 2. 1,1-1,7. Jaula B. 2. 1,1-1,7. Jaula C (doble). 2. 2,5. Jaula D (doble). 2,5. 3. Jaula MTK. 2,3-5,4. 1,65. Tabla.2 Parámetros y datos de chapa de motores de 230 V DC Frame. n. Hp. P. I rated. Ra. La. 283. 3500. 15. 12.2. 54. 0.153. 1.30. 2500. 10/7.5. 7.46/5.60. 37/27. 0.301. 2.30. 1750. 5. 3.73. 19. 0.615. 4.50. 1150. 3. 2.24. 11. 1.43. 10.4. 850. 2. 1.49. 7.8. 2.61. 19.2. 500. 1. 0.75. 4.1. 7.56. 55.0. 3500. 20. 14.9. 73. 0.142. 1.10. 2500. 15. 12.2. 56. 0.279. 2.10. 1750. 10/7.5. 7.44/5.60. 39/28. 0.570. 4.30. 1150. 5. 3.73. 20. 1.36. 10.0. 850. 3. 2.24. 12. 2.42. 18.5. 500. 2. 1.49. 10.0. 6.71. 53.2. 300. 1. 0.75. 4.8. 12.3. 147. 3500. 25. 18.6. 89. 0.070. 0.70. 2500. 20. 14.9. 72. 0.137. 1.40. 1750. 15. 12.2. 56. 0.280. 2.81. 1150. 10/7.5. 7.46/5.60. 39/29. 0.657. 6.50. Wf = 150 Jm= 0.068. 284 Wf = 160 Jm =0.088. 286 Wf=180.
(27) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Tabla 2 Parámetros y datos de chapa de motores de 230 V DC (continuación) Jm = 0.087 850 5 3.73 20 1.19 12.0 500. 3. 2.24. 12. 2.32. 34.4. 300. 2. 1.49. 11. 7.50. 95.0. 3500. 40. 29.8. 141. 0.045. 0.73. 2500. 30/25. 27.4/18.6. 108/89. 0.089. 1.44. 1750. 20. 14.9. 74. 0.180. 2.93. 850. 10/7.5. 7.46/5.60. 40/29. 0.762. 12.5. Jm= 0.156. 500. 5. 3.73. 22. 1.33. 36.0. 365. 1750. 25. 18.6. 89. 0.086. 2.20. Wf=210. 1150. 15. 11.2. 55. 0.199. 5.10. 2500. 50/40. 37.3/29.8. 176/140. 0.033. 0.50. 17.50. 40/30. 29.8/22.4. 143/107. 0.067. 1.00. 1150. 25/20. 18.6/14.9. 92/73. 0.155. 2.40. 850. 15. 12.2. 56. 0.284. 4.40. 500. 7.5. 5.60. 29. 0.772. 13.0. 300. 3. 2.24. 12. 2.27. 35.0. 2500. 60. 44.8. 209. 0.0203. 0.52. 1750. 50. 37.3. 177. 0.0415. 1.10. 1150. 30. 22.4. 108. 0.0963. 2.50. 850. 20. 14.9. 73. 0.176. 4.60. 500. 10. 7.46. 40. 0.478. 13.0. 300. 5. 3.73. 20. 1.41. 36.0. 1750. 60. 44.8. 213. 0.0363. 0.85. 1150. 40. 29.8. 146. 0.0964. 2.00. 850. 30/25. 23.4/18.6. 112/92. 0.153. 3.60. 500. 15. 12.2. 58. 0.417. 11.0. 288 Wf = 200. Jm=0.296 366 Wf=220 Jm= 0.397. 367 Wf=230 Jm = 0.462. 368 Wf=242.
(28) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Tabla 2 Parámetros y datos de chapa de motores de 230 V DC (continuación) Jm=0.560 300 7.5 5.60 32 1.24 503. 29.0. 1750. 100/75. 74.6/56.0. 349/261. 0.0144. 1.10. 1150. 60/50. 44.8/37.3. 211/176. 0.084. 2.50. 850. 40. 29.8. 143. 0.066. 4.50. 500. 20. 14.9. 73. 0.168. 13.0. Jm=1.82. 300. 10. 7.46. 38. 0.500. 36.0. 504. 1750. 125. 93.3. 434. 0.0150. 0.85. 1150. 75. 56.0. 264. 0.0237. 2.00. 850. 50. 37.3. 177. 0.0420. 3.60. 500. 25. 18.6. 90. 0.115. 11.0. Jm=1.94. 300. 15. 12.2. 57. 0.342. 29.0. 505. 1750. 150. 112. 523. 0.0099. 0.73. 1150. 100. 74.6. 353. 0.0206. 1.70. 850. 75/60. 56.0/44.8. 268/213. 0.0380. 3.10. 500. 30. 22.4. 109. 0.109. 9.00. Jm=2.20. 300. 20. 14.9. 79. 0.350. 25.0. 506. 1150. 125. 93.3. 436. 0.0125. 120. Wf=500. 500. 40. 29.8. 143. 0.0660. 6.50. Wf=325. Wf= 410. Wf=430. n = velocidad nominal en rpm, Hp = Horsepower nominal, 1hp = 746 W, P = potencia a plena carga en Kw, Irated Ianom en A, Ra= resistencia del circuito de armadura en Ω.
(29) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Tabla 3 Valores de corriente nominal para motores trifásicos de CA Motores de Inducción. Motores sincrónicos. Rotor. Rotor bobinado y de Jaula. Factor de potencia unitario. Hp. 110V 220V 440V 550V. 220 V 440 V 550V 2300V. 2300V ½ ¾ 1. 4. 2. 5,6 2,8. 1. 0,8. 1,4 1,1. 7. 3,5. 10. 5. 2,5. 13. 6,5. 3,3 2,6. 3. 18. 9. 4,5 4,0. 5. 30. 15. 7,5 6,0. 7¼. 44. 22. 11 9,0. 10. 54. 27. 14 11. 15. 40. 20. 16. 20. 52. 26. 21. 25. 64. 32. 26. 7. 54. 27. 22. 5,4. 30. 78. 39. 31. 8,5. 65. 33. 26. 6,5. 40. 104. 52. 41 10,5. 86. 43. 35. 8,0. 50. 125. 63. 50 13. 108 54. 44. 10. 60. 150. 75. 60 16. 128 64. 51. 12. 75. 185. 93. 74 19. 161 81. 65. 15. 100. 246 123. 98 25. 211 106 85. 20. 125. 310 155. 124 31. 264 132 106. 25. 150. 360 180. 144 37. 158 127. 30. 200. 480 240. 192 48. 210 180. 40. 1 ½ 2. 1,8 1,4 2. Equipos e instrumentos a utilizar. •. 2 máquinas de CD AL-506 (motor y generador). •. 1 amperímetro DC (escala 0-5A) (corriente de armadura del motor). •. 1 amperímetro DC (escala 0-2.5A) (corriente de campo del motor).
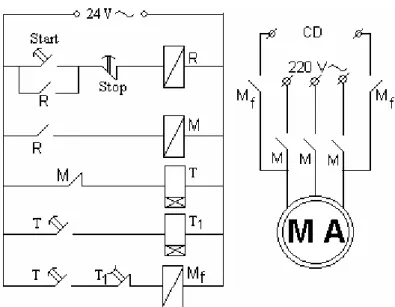
(30) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. •. 1 amperímetro DC (escala 0-2.5A) (corriente de armadura del generador). •. 1 voltímetro DC (escala 0-250V) (voltaje terminal del motor). •. 1 voltímetro DC (escala 0-250V) (voltaje terminal del generador). •. 1 temporizador (escala 12 minutos). •. 1 contactor magnético (CONT-153). •. 1 estación de pulsadores (PULSADOR). •. 1 térmico (RT-311). •. 1 reóstato variable (3300Ω/1000 W, Imáx =0.5A)(campo del motor). •. 1 reóstato variable (3300 Ω /1000 W, Imáx =0.5A)(campo del generador). •. 1 reóstato variable (Imáx =3A)(limitador de corriente en la armadura del motor). •. 1 reóstato variable (470 Ω /1000 W REOSTATO- 3500)(carga del generador). •. cables de conexiones. Medidas de seguridad. •. No realizar ninguna conexión en el circuito sin la autorización y orientación del profesor. •. No tocar las partes energizadas del circuito. •. Fijar la escala de los instrumentos por encima del valor que se desee medir. •. No golpear ni apoyarse en los instrumentos. •. No energizar hasta que el profesor no haya revisado las conexiones. Técnica operatoria. 1. Montaje del circuito de la figura 5. Figura. 5 Circuito de control para arranque y parada por tiempo de un motor 1.1 Montar el circuito de la figura 5 del anexo 1 1.2 Conectar el motor como se muestra en al figura 6 del anexo 1.
(31) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. 1.3 Conectar el campo del generador y el motor según se muestra en la figura 7 del anexo1. 1.4 Conectar la carga al generador según muestra la figura 8 del anexo 1 2. Colocar el conmutador del módulo CONMUTADOR 3/3 en la posición 1 y fijar la corriente por el campo de ambas máquinas a 0.5 A, y retornarlo a la posición inicial. 3. Colocar el temporizador en escala de 12 minutos y seleccionar los intervalos de tiempo para cada estado de carga 4. Colocar el reóstato que limita la corriente de armadura en un 70 % de su valor. 5. Arrancar el motor, quitar la resistencia limitadora y poner el conmutador en la posición 1 6. Regular el voltaje en los terminales del motor de manera que el voltaje en los terminales del generador sea 215 V para cada estado de carga (esto se logra variando el cursor de la fuente de CD RFT SG 280) 7. Tomar la lectura del voltaje de armadura (215 V) y corriente de armadura del generador para cada estado de carga 8. Repetir el procedimiento para los tres tipos de regímenes de trabajo 9. Calcular y elegir el motor adecuado según los catálogos. Informe a presentar. El informe de laboratorio se realizará individualmente en trabajo independiente tomando como base los datos obtenidos durante el desarrollo del laboratorio. Dicho informe deberá contener: 9 Título del laboratorio 9 Objetivos del mismo 9 Desarrollo. •. Esquemas y circuitos empleados. •. Tabulación de los datos. •. Diagramas de cargas. 9 Cálculos representativos 9 Resultados obtenidos 9 Obtener conclusiones.
(32) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Práctica de laboratorio 3 “Control de velocidad de los motores de CD por voltaje de armadura” Objetivo. 1. Obtener la familia de características de velocidad para el método de variación de voltaje en la armadura con convertidor Fundamento teórico. En la industria moderna se tiene gran cantidad de mecanismos o accionamientos que requieren trabajar a diferentes velocidades según sea la fase del proceso productivo, dentro de este grupo se pueden relacionar algunas máquinas de herramientas, grúas, mecanismos de transportación, sistemas de bombeos. Se entiende por control de velocidad, a la variación de la velocidad lograda por acciones adicionales o externas. ejecutadas sobre el motor para ajustar la misma, a determinado valor requerido por el accionamiento en función de la demanda del proceso. Esta variación puede ser manual o automatizada. Este concepto no debe confundirse con la variación natural que experimenta la velocidad cuando se produce un cambio en el valor de la carga acoplada al motor, dicha variación depende de las características del motor.. La siguiente expresión constituye la característica de velocidad del motor de corriente directa. w=. Vc Ia( Ra + Raa) − kφ kφ. (1). donde: Ia : corriente de armadura. Vc : voltaje de alimentación del sistema Ra : resistencia total de armadura de la máquina de CD, la cual incluye las. resistencias de los devanados compensadores, de los interpolos, de la propia armadura y la de contacto de las escobillas con el colector Raa : resistencia colocada en serie con la armadura del motor. φ : flujo de excitación k=. pN : coeficiente constructivo del motor 2πa.
(33) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. p : número de polos N y a : número de conductores activos y trayectorias en paralelo de los devanados. de armadura De esta expresión se puede pasar a la característica mecánica del motor, debido a que se conoce que el momento electromagnético desarrollado por el mismo se determina como: Me =. pN φ ⋅ Ia = kφ ⋅ Ia 2πa. (2). Colocando en (1) el valor de corriente obtenido a partir de (2) se obtiene la expresión de la característica mecánica del motor de CD. w=. Vc Me( Ra + Raa) − kφ (kφ )2. (3). De (1) y (3) se observa que para φ = constante las características de velocidad y mecánicas del motor shunt de CD constituyen líneas rectas, que cortan los ejes de coordenadas. Estas características se muestran a continuación:. Figura.1 Características de velocidad y mecánica del motor shunt de CD. El eje de las ordenadas se corta por ambas características en el mismo punto, debido a que los primeros miembros de ambas ecuaciones son iguales. La ordenada de este primer punto se puede hallar si se hacen Ia = 0 y Me = 0 en estas expresiones, lo cual corresponde al régimen de vacío del motor. A esta velocidad se le denomina velocidad de vacío: w0 =. Vc kφ. (4).
(34) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Los puntos de corte de las características de velocidad y mecánica con los ejes de las abscisas determinan la corriente y el momento de cortocircuito. Es bueno aclarar que por régimen de cortocircuito se denomina a aquel régimen de trabajo del motor en el cual su velocidad es cero y consecuentemente su fuerza electromotriz. En este régimen, la corriente de armadura está determinada por: Ia cc =. Vc Ra + Raa. (5). y el momento de cortocircuito: Mecc = kφ ⋅ Iacc =. k ⋅ Vc ⋅ φ Ra + Raa. (6). Los principales parámetros de las características de velocidad y mecánicas: Iacc y Mecc dependen del voltaje Vc , de la resistencia del circuito de armadura y del flujo de excitación. Con la variación de estas magnitudes se puede obtener familias de características de velocidad y mecánicas. De estas familias se acostumbra a separar la característica de velocidad natural y la característica mecánica natural, entendiéndose por estas, aquellas características que corresponden al voltaje de alimentación nominal del motor (VN), a su flujo nominal de excitación ( φ N ) y a la resistencia en serie con la armadura del motor igual a cero ( Raa = 0 ). El resto de las características de ambas familias se les denomina artificiales o reostáticas. [4] De la expresión (1) se deduce que los tres posibles métodos de control de la velocidad en los motores shunt de CD son: 1. Variando el voltaje aplicado a la armadura del motor. 2. Variando la corriente de excitación del campo del motor (flujo magnético). 3. Variando la resistencia del circuito de armadura del motor (control reostático). Variación del flujo magnético Este principio de control de la velocidad se obtiene, directamente, del análisis de las características mecánicas y de velocidad del motor de CD. Préstese atención al hecho de que la corriente de excitación y, consecuentemente el flujo magnético, solo se pueden variar en el sentido de disminución con respecto al nominal, esto se debe a que en condiciones normales de trabajo esta corriente no puede ser superior a la nominal. Consecuentemente el control de velocidad se puede lograr mediante la disminución del.
(35) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. flujo de campo o como se acostumbra a expresar mediante el debilitamiento del flujo magnético. Para el análisis de las características de velocidad y mecánicas es necesario basarse en las expresiones ya antes vistas: w0 =. Vc kφ. (8). Mecc = kφ ⋅ Ia cc =. kφ ⋅ Vc Ra + Raa. (kφ ) = − Mecc dM =− β= dw Ra + Raa w0. (9). 2. (10). en las cuales se ve que con la disminución del flujo magnético crece la velocidad de vacío ( w0 =. V0. kφ. ), se mantiene constante la corriente de cortocircuito, disminuyen el. momento de cortocircuito y la rigidez de las características mecánicas. En las figura 2 se muestran las características de velocidad y mecánicas para este caso.. Figura. 2 Características mecánicas y de velocidad del control por campo: a) de velocidad; b) mecánicas..
(36) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Control reostático de la velocidad Otro método de variación de la velocidad de un motor de CD con excitación independiente es el que utiliza un reóstato con varios pasos, colocado en serie con la armadura de dicho motor. A este control se denomina reostático. Sus características de velocidad y mecánicas se obtienen, directamente, al variar Raa en las expresiones (1) y (3). La rigidez de las características disminuye con el aumento de Raa según se deduce en la expresión (10).. Figura. 3 Características mecánicas del control reostático de velocidad. Variando el voltaje aplicado a la armadura del motor (mediante un convertidor controlado). La energía eléctrica se genera y se distribuye, fundamentalmente en forma de energía de corriente alterna con una determinada frecuencia. Para la alimentación de los motores de CD es preciso disponer de una instalación convertidora. En la técnica actual las instalaciones convertidoras controladas tienen una gran utilización, con la ayuda de las cuales se realiza la conversión de energía eléctrica en mecánica y viceversa. El principio de acción del convertidor consiste en que las válvulas realizan el papel de llaves, que dejan pasar la corriente con una pequeña caída de voltaje durante el período de conducción y cierran, no dejándola pasar durante el período de no conducción. La regulación de voltaje se logra mediante la variación de la duración del tiempo de trabajo de las válvulas en el período de conducción. Esto se realiza mediante el retraso del comienzo de la conducción de cada válvula que queda caracterizado por el ángulo α el cual se mide a partir del punto o memento de apertura natural de la válvula. El circuito equivalente del sistema controlado motor para el caso del rectificador trifásico puente, asumiendo conducción continua, es el siguiente:.
(37) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Figura. 4 Circuito equivalente del sistema controlado motor. donde: Rb: resistencia del reactor de alisamiento (Los gráficos de voltaje y de corriente de los convertidores presentan formas complejas, las cuales contienen componentes constantes y variables, con el objetivo de disminuir estas componentes variables, que influyen de forma negativa sobre los procesos de calentamiento y de conmutación de la máquina, en el circuito de carga del convertidor se conecta un reactor de alisamiento, poseedor de una determinada inductancia). Tabla. 1 Coeficientes del circuito equivalente. Rectificador. N. K. M. K1. 1 φ O.C puente. 1. 2. 2. 0,9. 1 φ O.C center-tap. 1. 1. 2. 0,9. 3 φ nulo. 1. 1. 3. 1,17. 3 φ puente. 2. 2. 6. 2,34. Aplicando la ley de Kirchhoff de voltaje en el circuito anterior, teniendo en cuenta la tabla 1 queda: xa ⎛ ⎞ Udo cos α − Ia⎜ 2 Rt + 3 + Rb + Ra ⎟ − E − 2ΔUa = 0 π ⎝ ⎠. (11). ⎛ xa ⎞ Si despreciamos la conmutación ⎜ 3 ⎟ = 0 , se puede obtener la ecuación de la ⎝ π ⎠ característica de velocidad del sistema controlado-motor: w=. Udo cos α − Ia(2 Rt + Rb + Ra ) − 2ΔUa kφ. (12). w=. Udo cos α − 2ΔUa IaRε T − kφ kφ. (13). y la característica mecánica:.
(38) Capítulo I w=. Prácticas de laboratorio de accionamiento eléctrico I Udo cos α − 2ΔUa Rε T − M kφ (kφ )2. (14). donde: Rε T = 2 ⋅ RT + Rb + Ra. De estas expresiones, se puede concluir que cuando estos convertidores trabajan en régimen continuo las características mecánicas de velocidad del accionamiento constituyen líneas rectas, cuyas pendientes dependen de la resistencia Rε T . El módulo de la rigidez de las características del SRCM es menor que el correspondiente al motor, debido a las caídas adicionales introducidas por el convertidor. El control de la velocidad en el SRCM se produce mediante la variación del ángulo de disparo (α ) de los tiristores, o sea, variando la fem del convertidor. Variando (α ) en los límites de 0 a π. 2. el valor de la fem (Ed ) varía desde Udo a 0. Resulta claro, que las. características mecánicas y de velocidad del accionamiento, en este caso, constituirán una familia de líneas rectas paralelas entre sí, como se muestra en la figura siguiente:. Figura. 5 Características mecánicas y de velocidad del SRCM. Estas características cortan el eje de las ordenadas en el valor correspondiente a la velocidad de vacío: w0 =. Udo cos α − 2ΔUa kφ. (15).
(39) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Sin embargo, en realidad la velocidad de vacío del accionamiento difiere de la expresada en (15). Esto se debe a que el circuito equivalente de la figura 4 y las expresiones de las características de velocidad y mecánicas (13) y (14) corresponden al régimen de funcionamiento continuo del convertidor. Cuando disminuye la corriente de carga a valores bajos ( Ia → 0 ), comienza a producirse el régimen de corriente discontinua del convertidor, durante el cual el ángulo de conducción del tiristor es. λ < 2π m . En este caso la curva de corriente de la carga contiene intervalos en los que no hay corriente. Para este régimen las expresiones anteriores no pueden ser aplicadas. Los períodos de tiempo de funcionamiento del convertidor donde no circula corriente a través del. mismo y, lógicamente, a través del motor se le denomina régimen de. funcionamiento discontinuo del convertidor. Para explicar este régimen se puede suponer un motor que trabaja con una alta carga, la cual determina una alta corriente y, por lo tanto, una energía almacenada en las inductancias debido a la misma, también alta. Esta posibilita que la válvula que deja de conducir pueda mantenerse en conducción hasta tanto la otra comience a hacerlo o incluso, exista un solapamiento entre ambas, lo cual garantiza el funcionamiento continuo del convertidor. Si trabajando en estas condiciones se retira la carga al eje del motor y no se altera el valor de α , la corriente que ahora circulará será la correspondiente al régimen de vacío del motor, la cual determinará una energía pequeña almacenada en las inductancias, que puede provocar un funcionamiento del convertidor donde existan períodos de tiempo donde no circule corriente a través del convertidor y el motor, y el voltaje en el mismo es el correspondiente a su fem (E = kφ ⋅ w) . Pero además, si se comparan ambos casos se obtiene que durante el funcionamiento discontinuo del convertidor el valor del voltaje rectificado es superior para el mismo ángulo que para el caso del funcionamiento continuo. Esto trae como consecuencia que durante este período en la característica mecánica del motor se produzca una subida brusca en los valores de la velocidad como se muestra en la figura 5.. Equipos e instrumentos a utilizar. •. 1 motor AL-506.. •. 1 generador AL-506..
(40) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. •. 1 Taco generador.. •. 3 amperímetros. -. 1 amperímetro (escala 0-2.5A) (para medir la corriente de excitación del generador).. -. 1 amperímetro (escala 0-2.5A) (para medir la corriente de excitación del motor).. -. 1 amperímetro (escala 0-5) (para medir la corriente de armadura del motor).. •. •. 2 voltímetros -. Para medir voltaje de armadura del motor escala (250 V). Tipo ML-20. -. Para medir el voltaje de salida del tacogenerador en escala (10 V). 3 reóstatos. -. 1 reóstato 3300/1000 W.(campo del motor). -. 1 reóstato 3300/1000 W. (campo del generador). -. 1 reóstato 3500. (carga del generador). • Sistema convertidor. • Cables de conexiones.. Medidas de seguridad. •. No realizar ninguna conexión en el circuito sin la autorización del profesor. •. No tocar las partes energizadas del circuito. •. Fijar la escala de los instrumentos por encima del valor que se desee medir. •. No golpear ni apoyarse sobre los instrumentos. •. No mover el valor del resistor (3300/1000 W) mientras el motor se esté girando, pues se variará la excitación del mismo, el flujo variará y por tanto el motor se puede embalar. Técnica operatoria. 1. Montaje del rectificador trifásico puente totalmente controlado..
(41) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Figura 6. Rectificador trifásico puente totalmente controlado 1.1 Montar el circuito que se muestra en al figura 9 de anexo 1. 1.2 Montar el circuito de mando para el rectificado anterior como se muestra en la figura 10 del anexo 1.. Figura. 6 circuitos de disparo del rectificador anterior. 1.3 Montar los circuitos de las figuras 6, 7, 8 y 11 del anexo 1 2. Trazar la característica natural de velocidad del motor 2.1 Para ello, desacople la carga del motor, es decir, desacople el generador y conecte directamente el taco generador al motor, para que obtenga de esta forma la velocidad ideal de vacío. Para obtener los valores de velocidad es necesario leer el voltaje a la salida del tacogenerador y dividirlo por la constante 0.0052. V (primera fila de la tabla) rpm. 2.2 Vuelva a conectar la carga al motor y comience a variar el valor del reóstato de 3500Ω, manteniendo inalterable el valor del voltímetro, es decir, sin que varíe el valor del Vnom del motor igual a 220 V, y llene de esta forma la tabla siguiente. Como se puede apreciar el último valor de.
(42) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I corriente en la tabla es de 3A, para que no sufra daños el motor (mirar datos de chapa) Tabla.1 Valores de la característica natural V (taco) w(rpm) Ia(A). 0.3. 1.4. 2. 3. Va(V). 220. 220. 220. 220. 2.3 Trace la característica natural del motor 3 Obtener la característica de velocidad variando el voltaje de armadura. 3.1 Para ello, varíe el ángulo de disparo de los tiristores, ya que al variar dicho ángulo estamos variando el área bajo la curva y por tanto, esto es equivalente a variar el voltaje de armadura. En la medida que aumentemos el ángulo de disparo estaremos disminuyendo el voltaje de armadura. 3.2 Llene la tabla siguiente, teniendo en cuanta que α 4 > α 3 > α 2 > α 1 y que Vd 0 =. V2 0.428 ⋅ 3 y. ⎛ V2 ⎞ ⎟⎟ ⎝ Vd 0 ⎠. α = cos −1 ⎜⎜. Tabla.3 Valores de las características artificiales para distintos ángulos de disparo Para α 1 V (taco) w(rpm) Ia(A). 1.4. 2. 2.5. 3. Va(V). 210. 210. 210. 210. Para α 2 V (taco) W(rpm) Ia(A). 1.4. 2. 2.5. 3. Va(V). 200. 200. 200. 200.
(43) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Tabla.3 (continuación) Para α 3 V (taco) w(rpm) Ia(A). 1.4. 2. 2.5. 3. Va(V). 190. 190. 190. 190. Para α 4 V (taco) w(rpm) Ia(A). 1.4. 2. 2.5. 3. Va(V). 180. 180. 180. 180. 3.3 Trazar la familia de curvas de velocidad contra corriente de armadura. Informe a presentar. El informe de laboratorio se realizará individualmente en trabajo independiente tomando como base los datos obtenidos durante el desarrollo del laboratorio. Dicho informe deberá contener: 9 Título del laboratorio. 9 Objetivos del mismo. 9 Desarrollo.. •. Esquemas y circuitos empleados.. •. Tabulación de los datos obtenidos para cada una de las condiciones dadas.. 9 Comparar los resultados. 9 Obtener conclusiones..
(44) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. Práctica de laboratorio 4 “Control de velocidad de motores asincrónicos”. Objetivo. 1. Comprobar y determinar experimentalmente las características mecánicas para el control reostático en las máquinas asincrónicas.. Fundamento teórico. En la industria moderna se tiene gran cantidad de mecanismos o accionamientos que requieren trabajar a diferentes velocidades según sea la fase del proceso productivo, dentro de este grupo se pueden relacionar algunas máquinas de herramientas, grúas, mecanismos de transportación, sistemas de bombeos. Se entiende por control de velocidad, a la variación de la velocidad lograda por acciones adicionales o externas ejecutadas sobre el motor para ajustar la misma, a determinado valor requerido por el accionamiento en función de la demanda del proceso. Esta variación puede ser manual o automatizada. Este concepto no debe confundirse con la variación natural que experimenta la velocidad cuando se produce un cambio en el valor de la carga acoplada al motor, dicha variación depende de las características del motor. Los principales indicadores que deben ser valorados para la selección y evaluación de los distintos métodos de control son: 1. Diapasón de control 2. Suavidad del control 3. Economía del control 4. Estabilidad 5. Dirección del control 6. Carga permisible El diapasón de control se define como la relación que existe entre las velocidades posibles máximas y mínimas. La suavidad es un importante indicador de la calidad del control y está caracterizada por la diferencia entre los valores de la velocidad de dos puntos consecutivos del control, mientras menor sea esta diferencia más suave es el control..
(45) Capítulo I. Prácticas de laboratorio de accionamiento eléctrico I. La economía, está determinada por los gastos de la inversión inicial y los de explotación, será económico aquel accionamiento que garantice una alta productividad del mecanismo, alta calidad del producto y costo mínimo. La estabilidad es caracterizada por la variación experimentada en la velocidad del motor para un valor dado de la variación del momento de la carga y depende de la rigidez o pendiente de las características mecánicas. La estabilidad será mayor mientras más grande sea la rigidez de estas características. La dirección del control de velocidad, no es más que el sentido en que varía la velocidad del motor con respeto a la velocidad base, o sea, si aumenta o disminuye respecto a esta y depende del tipo de control. En cuanto a la carga permisible hay que tener en cuenta los indicadores de incremento de temperatura, eficiencia, factor de potencia a los que trabaja la máquina de acuerdo al tipo de carga, y el método de control seleccionado debe ser función del tipo de carga para que el motor opere con los mejores indicadores energéticos posibles bajo las nuevas condiciones. [8] Los métodos de control de la velocidad en motores asincrónicos, se derivan de la expresión de la velocidad de rotación (rad/seg) que es: wr = wS (1 − s) wS =. 2π ⋅ f p. (1) (2). donde: wr : velocidad del rotor (rad / seg). wS : velocidad sincrónica (rad / seg) s: deslizamiento f : frecuencia (Hz) p : número de polos. Del análisis de la expresión (1) se obtiene que los procedimientos para controlar la velocidad de los motores asincrónicos se dividen en dos grupos atendiendo a la variable de control. 1. Controlando la velocidad de rotación del campo magnético del motor..
Figure




+7





Documento similar
Están conectadas en corto circuito por construcción en el caso de un motor de jaula de ardilla y de manera externa en el caso de un motor de rotor devanado el flujo en
Para recibir todos los números de referencia en un solo correo electrónico, es necesario que las solicitudes estén cumplimentadas y sean todos los datos válidos, incluido el
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2010 representan en todos los aspectos significativos la imagen fiel
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2012 representan en todos los aspectos
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo 168
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo
En cuarto lugar, se establecen unos medios para la actuación de re- fuerzo de la Cohesión (conducción y coordinación de las políticas eco- nómicas nacionales, políticas y acciones
D) El equipamiento constitucional para la recepción de las Comisiones Reguladoras: a) La estructura de la administración nacional, b) La su- prema autoridad administrativa
