Modelación y Control Difuso de un Prototipo a Escala de una Grúa de Techo Edición Única
152
0
0
Texto completo
(2) INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY. P R O G R A M A D E G R A D U A D O S E N INGENIERÍA. MODELACIÓN. Y CONTROL. DIFUSO. DEU N. P R O T O T I P O A E S C A L A D E U N AG R U A D E T E C H O. TESIS P R E S E N T A D A C O M O REQUISITO. PARCIAL. P A R A O B T E N E R E L G R A D O ACADÉMICO D E : MAESTRO E N CIENCIAS E S P E C I A L I D A D E N INGENIERÍA D E C O N T R O L. M A R T I N GUTIÉRREZ D E L G A D O. DICIEMBRE DE 1995.
(3) INSTITUTO T E C N O L Ó G I C O Y D E ESTUDIOS SUPERIORES D E M O N T E R R E Y CAMPUS MONTERREY. P R O G R A M A D E G R A D U A D O S E N INGENIERÍA. M O D E L A C I Ó N Y C O N T R O L DIFUSO D E U N PROTOTIPO A ESCALA D E UNA GRÚA D E T E C H O. TESIS. P R E S E N T A D A C O M O REQUISITO P A R C I A L PARA O B T E N E R EL G R A D O ACADÉMICO D E. M A E S T R O E N CIENCIAS ESPECIALIDAD E N INGENIERÍA D E C O N T R O L. MARTIN GUTIÉRREZ D E L G A D O. DICIEMBRE D E. 1995.
(4) ii.
(5) INSTITUTO TECNOLÓGICO Y D E ESTUDIOS SUPERIORES D E MONTERREY CAMPUS MONTERREY DIVISIÓN D E G R A D U A D O S E. INVESTIGACIÓN. P R O G R A M A D E GRADUADOS E N INGENIERÍA. Los miembros del comité de tesis recomendamos que l a presente tesis del Ing. Martín Gutiérrez Delgado sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias especialidad en: INGENIERÍA D E CONTROL. Comité de tesis:. Rogelio Soto Rodríguez, P h . D .. ASESOR. Federico Viramontes 'Brown^HPnTD. Director del Programa de Graduados en Ingeniería Diciembre de 1995.
(6) iv.
(7) P a r a toda m i familia que siempre me ha apoyado..
(8) vi.
(9) Reconocimientos. • Quiero agradecer a Dios el haberme dado l a oportunidad de poder realizar las metas que me he propuesto así como el apoyo que he recibido en los momentos más difíciles que he vivido. • A t o d a m i familia le debo un reconocimiento especial por todo el apoyo incondicional que he recibido a lo largo de toda m i vida. • A mis amigos les doy las gracias por todos los momentos que han compartido conmigo y por todas las ideas y comentarios que contribuyeron al mejoramiento de esta tesis, en especial a Antonio Castillo por toda su ayuda para l a construcción del prototipo a escala de l a grúa de techo. • Este trabajo no hubiera sido posible sin todas las facilidades otorgadas por el D r . Jorge Olvera, Director del Departamento de Ciencias Computacionales del I T E S M Campus Monterrey, para l a construcción y ubicación del prototipo a escala de l a grúa de techo. • F i n a l m e n t e doy las gracias al D r . Rogelio Soto, asesor de esta tesis, y al D r . José de Jesús Rodríguez, sinodal de l a misma; por todo el apoyo recibido durante mis estudios de maestría así como durante el desarrollo de l a tesis.. MARTÍN GUTIÉRREZ D E L G A D O Instituto Diciembre. Tecnológico. y de Estudios Superiores de. 1995. vii. Monterrey.
(10) viii.
(11) Modelación y Control Difuso de un Prototipo a Escala de una Grúa de Techo. Martín Gutiérrez Delgado, M . C . Instituto Tecnológico y de Estudios Superiores de Monterrey, 1995. Asesor de l a tesis: Rogelio Soto Rodríguez, P h . D .. RESUMEN. E l control automático de grúas de techo es un área, que por su i m p o r t a n c i a en l a industria, h a sido investigada desde diversos enfoques de l a teoría de control. H a s t a ahora ningún controlador ofrece una solución completa.. P a r a el desarrollo de esta. tesis se construyó un prototipo a escala de una grúa de techo.. Se hizo u n modelo. no lineal, incluyendo las fricciones viscosas y de Coulomb, del prototipo a escala con el fin de simular por computadora los controladores diseñados antes de probarlos en el prototipo.. Se diseñaron dos controladores: uno difuso y el otro lineal empleando. técnicas de control óptimo. Después de hacer una serie de comparaciones entre los dos controladores se llegó a l a conclusión de que el control difuso es más robusto, ante el cambio en el parámetro de longitud de transporte, que el control lineal; debido a que con el control difuso las oscilaciones de l a carga durante el transporte de l a m i s m a son menores a las oscilaciones presentadas con el control lineal. También se concluyó que es más difícil diseñar u n control difuso que u n control lineal, y a que el proceso p a r a diseñar el control difuso casi no es sistemático..
(12) X.
(13) Índice General. Reconocimientos. vii. Resumen. ix. Capítulo 1. Introducción. 1. Capítulo 2. Modelación e Identificación del Sistema. 5. 2.1. Introducción. 5. 2.2. Descripción del Prototipo de l a Grúa. 6. 2.2.1. Simbología. 7. 2.2.2. Instrumentación. 8. 2.3. 2.4. Modelación Matemática del Sistema 2.3.1. Modelación del M o t o r de c.d. 10. 2.3.2. Modelación del Carro y l a Carga de l a Grúa. 15. 2.3.3. Modelación del Sistema Completo. 19. 2.3.4. Modelación de las Fricciones de Coulomb. 20. Identificación del Sistema. 23. 2.4.1. Estimación A p r o x i m a d a de las Constantes. 24. 2.4.2. Obtención de Datos para Validar y Optimizar los Modelos . . .. 32. 2.4.3. Validación del Modelo Identificado. 33. 2.4.4. Optimización del Modelo Aplicando Máxima Verosimilitud . . .. 37. 2.4.5. Validación del Modelo Optimizado. 40. 2.4.6. Comparación Entre el Modelo No Optimizado y el M o d e l o O p t i mizado. 2.5. 9. 43. Conclusiones sobre l a Modelación e Identificación del Sistema. Capítulo 3. C o n t r o l Lineal. 43 45. 3.1. Introducción. 45. 3.2. Identificación Paramétrica del Sistema. 46. 3.2.1. Pruebas SBSA(Secuencia B i n a r i a Seudo Aleatoria). -46. 3.2.2. Estructura del Modelo. 47. 3.2.3. Aplicación del Método de Mínimos Cuadrados. 50. xi.
(14) 3.2.4. Validación del Modelo Lineal Estimado. 52. 3.3. Controlabilidad y Observabilidad del Sistema. 55. 3.4. Diseño del Control Óptimo. 56. 3.5. Consideraciones Adicionales al Diseño del Controlador. 60. 3.6. Funcionamiento del Control Óptimo. 63. Capítulo 4. C o n t r o l Difuso. 69. 4.1. Introducción. 69. 4.2. Preliminares de Lógica Difusa. 70. 4.2.1. Perfil Histórico de l a Lógica Difusa. 70. 4.2.2. Conjuntos Difusos. 72. 4.2.3. Variables Lingüísticas. 77. 4.2.4. Proposiciones Difusas. 78. 4.3. E s t r u c t u r a y Diseño del Control Difuso .. 80. 4.3.1. Normalizado. 80. 4.3.2. Emborronado. 81. 4.3.3. Conjunto de Reglas. 85. 4.3.4. Inferencia. 94. 4.3.5. Desemborronado. 95. 4.3.6. Denormalizado. 98. 4.4. Consideraciones Adicionales al Diseño del Controlador. 98. 4.5. Funcionamiento del Control Difuso. 99. Capítulo 5. Comparación de los Controladores. 103. 5.1. Introducción. 5.2. Criterios de Comparación. 5.3. C a m b i o en el Parámetro de Longitud de Travesía del Carro de l a Grúa. 106. 5.4. C a m b i o en el Parámetro de M a s a de l a Carga. 111. 5.5. C a m b i o en el Parámetro de Longitud del Cable de l a Grúa. 113. 5.6. Conclusiones A c e r c a de las Comparaciones. 115. Capítulo 6 Apéndice A. 103 ,. Conclusiones. 104. 117. Construcción e Instrumentación del Prototipo a E s c a l a de. la Grúa de Techo. 121. A.l. Introducción. 121. A,2. Construcción y Descripción del Prototipo a Escala de l a Grúa. 121. A.3. A c t u a d o r ( M o t o r de c.d.). 123. A.4. Sensores A . 4 . 1 Codificador Óptico. 124 125. A.4.2. Sensor de Ultrasonido. . . xii. 127.
(15) Bibliografía. 133. Vita. 136. xiii.
(16) xiv.
(17) Capítulo 1. Introducción. Nos hemos empezado a dar cuenta de la importancia. de la automati-. zación, no como un medio para dejar a la gente sin su trabajo, sino como un medio para complementar. las actividades humanas. El hecho de que la. tecnología es universal es actualmente aceptado en todo el planeta, y nosotros como ingenieros profesionales,. hemos sido llamados para actuar de. una manera socialmente responsable. Existen muchos retos de. importancia. vital por enfrentar, no solo en el desarrollo de nuevas teorías y nuevas tecnologías, sino en el intento de hacerlas funcionar. en la práctica,. no para. el beneficio de un país o una comunidad aislada,. sino en beneficio de la. humanidad. - M . G . Rodd "Meeting the Real Needs of the Automation Industry" Editorial de la publicación: "Control Engineering Practice". [25].. A c t u a l m e n t e , con l a formación de grandes bloques económicos, l a apertura de nuevos mercados, el crecimiento de las economías de paises en desarrollo, además del surgimiento de una impresionante estructura de comunicaciones, cuyos mejores días están por venir, nos damos cuenta de que este mundo cada vez es más competitivo. L a industria, como base de l a economía de un país, cada vez juega u n papel más importante en el desarrollo socioeconómico del mundo. Es por esto que debemos considerar como primordial l a automatización de los procesos en l a industria. Y a no podemos n i debemos depender de l a habilidad o destreza de alguna persona para llevar a cabo las principales tareas del proceso de producción. U n a de estas tareas es el transporte y manejo de cargas dentro y fuera de las fábricas. Aquí es donde las grúas desempeñan una actividad m u y importante, y a que si se hace m a l este trabajo se corre el riesgo de dañar l a carga, o en el mejor de los casos de hacer las cosas de una manera innecesariamente lenta ocasionando con esto los llamados "cuellos de botella" que perturban severamente el proceso de producción. De entre todos los tipos de grúas, las grúas lineales de techo son de las más importantes.. Se utilizan tanto para transportar cargas dentro de u n a fábrica como 1.
(18) para cargar l a mercancía en un barco, tren o camión.. Siendo este tipo de grúas t a n. versátil, es difícil tener un controlador que tome en cuenta todos los parámetros que se pueden ver afectados en el sistema. Es por esto que en l a mayoría de las veces es un operador humano el que las maneja; no obstante, estas personas requieren de mucha destreza, entrenamiento, experiencia y capacidad de concentración para poder hacer bien este trabajo. E l menor descuido que tenga el operador puede provocar desde pérdidas humanas hasta graves pérdidas económicas. C o n todo esto se puede visualizar la i m p o r t a n c i a de automatizar l a operación de una grúa. Son muchos los esfuerzos que se han hecho para crear algoritmos de control que permitan l a operación automática de una grúa. No obstante, de l a bibliografía consultada, ninguno presenta una solución completa. Esto incluso después de haber aplicado algoritmos de control lineal [24], no lineal [8], óptimo [29], adaptable [3, 4], con trayectorias precalculadas [16, 26] etc. Además en estas publicaciones casi todos los trabajos son teóricos, y a que solamente en algunos de estos trabajos utilizan simulaciones empleando modelos simplificados de una grúa y en m u y pocos trabajan con prototipos a escala de grúas.. Solamente en una publicación [27] mencionan estar trabajando con. una grúa real, de más de cien metros de longitud, instalada en un puerto. C o n esto se comprueba que l a teoría de control lleva un adelanto de una o más décadas con respecto a l a práctica del control [25]. C o n esto en mente, se tuvo como principal objetivo para el desarrollo de esta tesis, el construir un prototipo a escala de una grúa lineal de techo, con el fin de poder probar los algoritmos de control que se diseñaran. Además de este objetivo se plantearon otros dos de suma importancia: hacer un modelo matemático de l a grúa que describiera las dinámicas más importantes del sistema (incluyendo efectos no lineales y fricciones viscosas y de Coulomb) con el fin de poder simular por computadora los algoritmos de control que se desarrollaran antes de probarlos en el prototipo a escala de l a grúa. E l otro objetivo fue el de diseñar un controlador difuso con l a espectativa de que éste sea más robusto que un control lineal con respecto a l a incertidumbre en los parámetros. Se decidió hacer u n control difuso porque se sabe que éste es especialmente efectivo en el control de procesos no lineales, como es el caso de l a grúa. Además esto se hizo con l a motivación de probar el control difuso en un proceso real y así poder evaluar sus ventajas y desventajas con respecto a un control convencional. E l prototipo que se construyó consta básicamente de un riel por el que se desliza un carro sujeto por medio de una banda al cabezal de un motor de corriente directa. L a carga, suspendida en el aire, está sujeta al carro por medio de un cable de acero. Este cable tiene u n a longitud fija, por lo que no es posible que l a longitud de éste cambie d u rante el transporte de una carga. Esto no representa Una gran desventaja considerando que en l a mayoría de las grúas reales primero se levanta l a carga, luego se transporta a lo largo de u n a distancia variable y cuando cesan las oscilaciones remanentes se b a j a l a carga. P o r lo tanto los algoritmos que se diseñaron no tienen l a posibilidad de alterar 2.
(19) la longitud del cable que sostiene a la carga. P a r a poder cumplir con los objetivos planteados, se pensó en l a siguiente metodología: 1. Construir el prototipo a escala de l a grúa de techo. 2. Hacer un modelo matemático del prototipo que incluya l a características no l i neales como son las relaciones trigonométricas y las fricciones de C o u l o m b . 3. Diseñar u n control lineal con el fin de poderlo comparar contra el control difuso. 4. Diseñar un control difuso. 5. Hacer pruebas para comparar y confrontar los controladores lineal y difuso. 6. E m i t i r conclusiones acerca de lo más destacado del trabajo hecho en los anteriores puntos. C o n esta metodología en mente, en el Capítulo 2 se presenta l a modelación e identificación del prototipo a escala de l a grúa de techo. Por modelación se entiende l a construcción de l a estructura matemática que modela las principales dinámicas del sistema. L a identificación es el proceso de encontrar el valor numérico de las constantes de l a estructura hecha en l a modelación. E n la identificación se aplicaron dos etapas: en la p r i m e r a se hizo una identificación aproximada del valor de cada constante haciendo uso de experimentos utilizando partes de l a grúa y en l a segunda parte se aplicó u n proceso de optimización de las constantes del modelo, empleado u n método de máxima verosimilitud que u t i l i z a datos del sistema completo. E l resultado de estas dos etapas es u n modelo que se comporta de una manera muy similar al sistema real. Este modelo es el que se emplea a lo largo de todas las simulaciones que se hicieron por computadora. E n el Capítulo 3 se diseña un control lineal utilizando una metodología de control óptimo.. E n este capítulo primeramente se hace una identificación lineal del sistema. empleando mínimos cuadrados. Este modelo, por ser lineal, se u t i l i z a exclusivamente para poder diseñar él controlador óptimo.. E n seguida se diseña el controlador para. luego hacerle algunas adecuaciones y así poderlo probar en las simulaciones y en el sistema real.. E n l a práctica se encontraron algunos problemas con las variables de. velocidad, por lo que fue necesario filtrar digitalmente estas señales. E l control difuso se presenta en el Capítulo 4. E n este capítulo se describen los conceptos básicos para entender el funcionamiento del controlador, además se presenta l a forma en que se derivaron las reglas difusas que constituyen el núcleo del controlador.. A l final del. capítulo se presenta el funcionamiento del controlador tanto en simulación como en el prototipo a escala de la grúa. E n el Capítulo 5 se hacen varias pruebas alterando el valor de algunos parámetros del sistema con el fin de poder observar l a manera en que se comportan los controladores lineal y difuso. Finalmente en el Capítulo 6 se presentan 3.
(20) las conclusiones acerca de los puntos más destacables que se encontraron a lo largo del desarrollo de l a tesis. Por último, se incluye un apéndice en el que se explica l a forma en que se construyó el prototipo a escala de la grúa de techo y además se presenta el funcionamiento y calibración de los sensores y actuadores utilizados para comunicar el prototipo con l a computadora.. 4.
(21) Capítulo 2. Modelación e Identificación del Sistema. El primer instinto de los científicos. es ajustar un modelo lineal a un. mundo no lineal. Esto crea otro problema de incongruencia, que hace un modelo matemático:. el dilema del. matemáticas lineales, mundo no lineal. -Bart Kosko [17]. 2.1. Introducción. E n este capítulo se muestra l a obtención de un modelo matemático del sistema conformado por el prototipo a escala de l a grúa de techo. P a r a l a realización de esta tesis es importante contar con un buen modelo matemático del sistema porque éste facilita el desarrollo e implementación de los diferentes controladores que se piensan diseñar, y a que permite l a simulación computacional de los controladores antes de probarlos en el prototipo. De hecho si se cuenta con un buen modelo matemático del sistema se puede estar seguro de que un controlador se comportará en el sistema real de forma m u y similar a l a que se comportó en l a simulación. Además en las simulaciones se pueden probar los cambios o mejoras que se hagan al controlador sin correr el riesgo de dañar nada, y a que al menos con este sistema, es m u y fácil golpear l a carga contra los soportes de l a grúa o chocar el carro en los extremos del riel si el controlador no está bien diseñado. Por otra parte se tiene l a ventaja de que en l a simulación es m u y fácil hacer cambios tanto del sistema como del controlador a diferencia del prototipo de l a grúa en el que hay que programar los cambios de los controladores en l a computadora o hacer los cambios físicos del sistema directamente en el prototipo. C o n el fin de tener un buen modelo matemático de l a grúa, que refleje fielmente las principales dinámicas del sistema, se decidió hacer un modelo no lineal del sistema; y a que de antemano se sabe que el proceso no es lineal. Además se modelan las fricciones viscosas y de C o u l o m b , tanto del motor como del carro de l a grúa. E n l a primera parte de este capítulo se muestra u n a descripción del prototipo a escala de l a grúa de techo con el fin de conocer y comprender el funcionamiento del sistema físico, luego se hace l a modelación matemática del sistema; es decir, se construye 5.
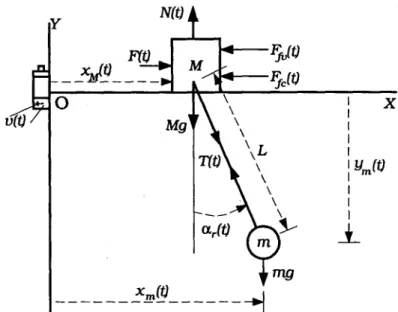
(22) l a estructura matemática con los efectos dinámicos que se desean modelar aplicando las leyes de la física del movimiento mediante el uso de ecuaciones diferenciales. E n seguida se hace la identificación del sistema, entendiendo que es la estimación numérica de las constantes del modelo matemático a partir de las mediciones tomadas del sistema real. E s t a parte se subdivide en dos: primeramente una estimación aproximada de las constantes del sistema con su respectiva validación y una segunda parte en l a que se aplica el método de estimación de máxima verosimilitud con el fin de mejorar l a estimación de las constantes del sistema; además de la validación final del modelo. Finalmente se presentan conclusiones acerca de la calidad del modelo obtenido.. 2.2. Descripción del P r o t o t i p o de l a Grúa. E l prototipo a escala de la grúa de techo consta básicamente de las siguientes partes: un motor de corriente directa (c.d.), una banda, un carro, un riel, un alambre de acero y u n a carga esférica. Estas partes se detallan en la Figura 2.1.. F i g u r a 2.1: Dibujo del prototipo a escala de l a grúa de techo.. E l riel está sujetado a un travesano que a su vez está sostenido por dos soportes verticales en los extremos. E l carro está situado bajo el riel de t a l forma que son las llantas del carro, que se deslizan sobre el riel, las que sostienen al carro en su posición. L a banda está unida a ambos extremos del carro y a su vez está sujeta por u n extremo sobre el cabezal del motor de c.d. y por el otro sobre una polea. L a banda está dentada y el cabezal del motor de c.d. tiene l a forma de engrane con l a m i s m a m e d i d a de los 6.
(23) dientes de l a banda de modo que es imposible que l a banda se resbale sobre el cabezal del motor.. L a longitud del riel es aproximadamente de 1.8 metros.. L a carga de la. grúa está u n i d a al carro por medio de un cable de acero. Este cable puede tener una longitud desde 0.1 m hasta 1.1 m . L a longitud del cable no puede variar durante el movimiento del carro, por lo que se considera a esta dimensión como una constante. L a carga es una masa esférica de 0.566 K g , pudiendo ser de hasta 3 K g . Las dimensiones del prototipo y en general todas las mediciones que se presenten a lo largo de esta tesis serán en el sistema m.k.s. ( metro, kilogramo y segundo). De acuerdo a [27] para que un prototipo a escala pueda modelar las características dinámicas y estructurales de una grúa real, se permite u n a relación máxima de 1:20. C o n esto podemos inferir que con el prototipo, que se construyó para l a realización de esta tesis, se pueden modelar grúas de hasta 36 metros de largo por 17 metros de alto; por lo tanto, se está abarcando una a m p l i a gama de grúas industriales. N o obstante, l a mayoría de las conclusiones que se obtengan pueden extrapolarse para grúas más grandes.. 2.2.1. Simbología. E n l a F i g u r a 2.2 podemos apreciar u n esquema de l a grúa en el que se presentan las principales variables y constantes del sistema. A continuación se detallan los símbolos del esquema.. F i g u r a 2.2: Esquema del prototipo de l a grúa con simbología.. v(t) X. M(Í). ¿AÍ(Í). = =. =. Voltaje aplicado al motor de corriente directa, en voltios ( V ) . Posición del carro de l a grúa en el eje X, en metros (m). Velocidad del carro de l a grúa en el eje X, en metros sobre segundo (m/s). 7.
(24) a(t). =. A n g u l o desde l a vertical hasta el cable de l a grúa, en grados sexagesimales (°). E l ángulo es positivo en el sentido contrario al de las manecillas del reloj. Velocidad del ángulo de l a grúa en grados sobre segundo ( ° / s ) . M a s a del carro de l a grúa, en kilogramos ( K g ) . M a s a de l a carga de l a grúa, en kilogramos ( K g ) . Longitud del cable que sostiene a l a carga de l a grúa, en metros (m).. E s t a simbología es l a que se empleará a lo largo de esta tesis. C o n esto podemos ver a l a grúa como u n sistema de una entrada y cuatro salidas, donde l a entrada es el voltaje aplicado al motor de c.d. y las salidas son l a posición del carro y el ángulo de la grúa con sus respectivas derivadas como se muestra en l a F i g u r a 2.3.. F i g u r a 2.3: Representación gráfica del sistema.. 2.2.2. Instrumentación. P a r a hacer l a adquisición de datos y l a manipulación del actuador de l a grúa se cuenta con u n a computadora I B M P S / 5 5 386 a 16Mhz. E l actuador, en este caso el motor de c.d., está controlado a través del puerto paralelo de l a computadora. E n este puerto se tiene conectado u n convertidor digital-análogo de 8 bits ( D A C - 0 8 C P ) en configuración bipolar con voltajes máximos de ± 1 0 voltios. Entre el convertidor y el motor se cuenta con u n a etapa de potencia, a base de transistores, que asegura u n suministro suficiente de corriente a l motor. P a r a hacer l a adquisición de datos se cuenta con l a siguiente instrumentación: u n codificador óptico incremental, ubicado en el motor de c.d., para medir l a posición del carro de l a grúa(xM(í)) y un sensor de ultrasonido para medir l a posición de l a carga de l a grúa y a su vez poder calcular el ángulo de l a carga(a(í)). Las señales que proporciona el codificador óptico se procesan electrónicamente y luego se introducen a l a computadora a través de l a interrupción del puerto paralelo. P a r a calcular l a velocidad del carro de l a grúa(¿Af (¿)) se mide el tiempo entre interrupciones del codificador óptico por medio del temporizador interno de l a computadora (Intel 8253-5). E l sensor de ultrasonido pertenece a u n a estación de adquisición de datos I B M P S L [10], que está conectada a l a computadora a través del puerto serial. L a velocidad del ángulo de l a grúa(á(í)) se obtiene restando el ángulo de l a medición anterior al ángulo de 8.
(25) la medición actual y dividiendo sobre el periodo de muestreo. E n el Apéndice A se encuentra u n a explicación detallada del actuador y los sensores anteriores. Periodo de Muestreo P a r a escoger el periodo de muestreo se tomaron en cuenta diversos factores. Por ejemplo, l a velocidad máxima de muestreo para la posición del carro de l a grúa, a través del codificador óptico, puede ser de casi 1 M H z , y a que en todo momento se dispone del dato; aunque para efectos prácticos se puede considerar como l O K h z l a velocidad máxim a . E n el caso del ángulo, l a velocidad máxima de muestreo del sensor de ultrasonido es de 50Hz. E n cuanto a l a medición de las velocidades de las variables anteriores, éstas presentan las mismas limitantes de su respectiva variable. Por otro lado las dinámicas principales de l a grúa son lentas con respecto a estas velocidades de muestreo; por ejemplo el periodo de oscilación de l a carga de l a grúa con L = 0.76 m y m = 0.566 K g es de 1.75 segundos. También hay que tomar en cuenta l a cantidad de operaciones matemáticas que requieren hacer los controladores; esto con el objeto de que tengan tiempo suficiente para calcular l a manipuladora en cada periodo de muestreo. E n e s t e rubro se calculó que l a computadora podía hacer 40000 operaciones de punto por segundo (debido a que l a computadora cuenta con un coprocesador. flotante. matemático. Intel 80387). Consultando l a bibliografía, para prototipos de grúas similares a la construida para esta tesis, se tiene que en [27, 24] se emplea un tiempo de muestreo de 40 ms (milisegundos), en [4] 30 ms, y en [16] 47 ms. Tomando en cuenta toda esta información se escogió u n periodo de muestreo de 20 ms que corresponde a l a velocidad máxima de muestreo del sensor de ultrasonido. Se escogió este periodo de muestreo porque si se tiene u n muestreo más rápido i m p l i c a tener que estimar mediciones del ángulo y velocidad del cable de l a grúa lo cual presupone l a utilización de alguna técnica para hacer esto (filtro de K a l m a n , splines, estimadores, etc.) además de complicar demasiado y quizá innecesariamente la estrategia de control. P o r otro lado en un periodo de muestreo de 20 ms se pueden hacer 800 operaciones de punto flotante. Considerando que se van a diseñar dos tipos de controladores a lo largo de esta tesis: lineales y difusos, 800 operaciones de punto flotante por periodo de muestreo son suficientes. F i n a l m e n t e , u n periodo de muestreo de 20 ms es alrededor de 30 veces más rápido que las principales dinámicas del sistema por lo que asegura un buen desempeño de los controladores.. 2.3. Modelación Matemática del Sistema. P a r a construir el modelo matemático de l a grúa se utilizan los principios de dinámica en el análisis de las diferentes partes del prototipo a escala. E n l a obtención de este modelo se consideran algunas de las características no lineales del sistema como son: 9.
(26) las fricciones de Coulomb y las relaciones trigonométricas entre algunos. componentes. del sistema. Esto representa una ventaja con respecto a los modelos lineales, y a que de antemano se sabe que l a grúa es un sistema no lineal. P a r a facilitar l a modelación, se procede a dividir el problema en las siguientes partes: modelación del motor de c.d., modelación del carro de l a grúa con el péndulo y l a modelación del sistema completo. A l final de esta sección se describirá l a forma en que se modelan las fricciones de Coulomb de l a grúa.. 2.3.1. Modelación del Motor de c.d.. E l motor de c.d. se modela tomando como base el modelo dinámico de u n motor de c.d. hecho en [21]. E l motor de corriente directa es de imán permanente y controlado por l a armadura. E n l a F i g u r a 2.4 podemos observar u n dibujo del motor de c.d., donde:. F i g u r a 2.4: Motor de c.d. de imán permanente.. Voltaje aplicado al motor de corriente directa, en voltios ( V ) . Es el torque ejercido por el eje del motor, en newton por metro (N-m). Es l a posición angular del eje del motor, en revoluciones (rev). Es el radio del cabezal del motor de c.d. = 0.008106 metros (m). A h o r a l a estructura eléctrica interna del motor se modela de acuerdo a l esquema presentado en l a F i g u r a 2.5 donde: Voltaje aplicado al motor de corriente directa, en voltios ( V ) . Resistencia del devanado de l a armadura, en ohms. (íl).. Inductancia del devanado de l a armadura, en henries ( H ) . Corriente del devanado de l a armadura, en amperios ( A ) . 10.
(27) F i g u r a 2.5: Esquema eléctrico del motor de c.d. de imán permanente. Voltaje de reacción contra-electromotriz, en voltios ( V ) . Corriente de campo, en amperios ( A ) . Coeficiente de fricción viscosa del motor, en newton por metro por segundo sobre revoluciones (N-m-s/rev). Torque de fricción, en newton por metro (N-m). C o n este término se pretende modelar l a fricción de Coulomb. A l final de esta sección se da una explicación más detallada de este término. Torque desarrollado por el motor, en newton por metro (N-m). Momento de inercia del rotor, en kilogramos por metro cuadrado sobre revoluciones ( K g - m / r e v ) . 2. Torque desarrollado por la carga acoplada al motor, en newton por metro (N-m). A continuación se presenta el resto de l a simbología necesaria para hacer l a modelación matemática del motor. Flujo magnético del entrehierro, en voltios por segundo ( V s ) . Constante de proporcionalidad, en ohms por segundo (íí-s). Constante de proporcionalidad, sin unidades. Constante motor-par, en voltios por segundo (V-s). Constante de reacción contra-electromotriz, en voltios por segundo sobre revoluciones (V-s/rev). Procediendo a hacer la modelación matemática del motor tenemos que el flujo magnético es directamente proporcional a l a corriente de campo (2.1) y el par desarrollado por el eje del motor es directamente proporcional al producto del flujo magnético por la corriente de armadura (2.2) 11.
(28) luego si sustituimos l a Ecuación 2.1 en l a Ecuación 2.2 tenemos: (2.3) Agrupando constantes en un solo término (2.4) y sustituyendo l a Ecuación 2.4 en l a Ecuación 2.3 llegamos a: (2.5) C o m o se puede ver, el par desarrollado por el motor es directamente proporcional a l a corriente de armadura. Luego, analizando l a m a l l a del circuito presentado en l a F i g u r a 2.5, vemos que l a ecuación de l a malla es: (2.6) donde el voltaje de reacción contra-electromotriz está dado por: (2.7) A h o r a de acuerdo a [21] L. a. suele ser muy pequeña, por lo que puede considerarse. con valor de cero. Tomando este factor en cuenta y sustituyendo l a Ecuación 2.7 en l a Ecuación 2.6 tenemos: (2.8) despejando l a corriente de armadura: (2.9) P o r o t r a parte, como se puede ver en el esquema de l a F i g u r a 2.5, l a ecuación que describe l a dinámica del rotor, aplicando l a Segunda ley del M o v i m i e n t o de N e w t o n para el caso rotacional, es decir, haciendo l a inercia rotacional por aceleración angular igual a l a sumatoria de torques, está dada por: (2.10) Si sustituimos l a Ecuación 2.9 en l a Ecuación 2.5 y a su vez en l a Ecuación 2.10 tenemos: (2.11) E n seguida, despejando el voltaje aplicado a l motor, tenemos que l a ecuación diferencial que representa l a dinámica del motor es: (2.12) 12.
(29) E l motor de c.d.. está acoplado al carro de l a grúa por medio de u n a banda. dentada; de modo que el movimiento rotacional del cabezal del motor se traduce en un movimiento lineal en el carro. Con el fin de simplificar l a unión de l a ecuación del motor con las ecuaciones del resto de la grúa se hace u n cambio de variable para transformar l a posición angular del cabezal del motor. (0(t)) en posición lineal correspondiente. a la. posición del carro de la grúa (xM(t)) en el eje X . E s t a transformación es posible porque conocemos el radio ( r ) del cabezal del motor, como se puede apreciar en l a F i g u r a 2.4. m. P o r lo tanto: (2.13) De igual forma se transforma el torque de carga en el eje del motor una fuerza de carga en el motor (F (t)), carga. (T (t)) en carga. sabiendo que torque es igual a fuerza por. distancia; en este caso l a distancia es el radio del cabezal del motor ( r ) : TO. (2.14) A h o r a sustituyendo las Ecuaciones 2.13 y 2.14 en l a Ecuación 2.12 tenemos: (2.15) Finalmente, en esta ecuación hay muchas constantes del motor que no conocemos; no obstante, lo que realmente nos interesa saber es l a dinámica del motor completo y no las constantes internas del mismo. Por esto podemos asumir que: (2.16) (2.17) (2.18) (2.19) Aquí vj(t). correspondería a u n voltaje de fricción, por analogía con el torque de. fricción. A h o r a sustituyendo las Ecuaciones 2.16, 2.17, 2.18 y 2.19 en l a Ecuación 2.15 llegamos a l a ecuación que nos describe l a dinámica del motor:. (2.20) Modelación de las Fricciones del M o t o r . Finalmente es importante explicar l a forma en que se modelan las fricciones del motor. Se tiene l a fricción viscosa y l a fricción de Coulomb. L a fricción viscosa es directamente 13.
(30) proporcional a l a velocidad de giro del motor; de modo que está dada por: f. 9(t).. m. La. fricción de Coulomb es como l a que se describe en [18], esta fricción es una fuerza constante que se opone a l giro del eje del motor, cuando éste está girando.. E n [7]. se le l l a m a torque de fricción. Experimentalmente se puede comprobar que al aplicar voltajes pequeños a l motor, el eje del mismo no se mueve; y no es sino hasta que se supera cierto u m b r a l de voltaje, al que llamaremos V , cuando empieza a girar el eje; u. es decir, cuando se supera el torque de fricción. torque de fricción. (T/(Í)). E n l a Ecuación 2.19 se convierte el. en u n voltaje de fricción ( u / ( í ) ) por facilidad en el manejo de. las ecuaciones, además de que facilita l a identificación del mismo, y a que es más fácil identificar u n voltaje que u n torque. E l voltaje de fricción es u n a función que depende de l a velocidad de giro del eje del motor(0(í)) y de l a suma de torques aplicados a l mismo. A continuación se presenta esta función:. (2.21). donde T¡Torques. es l a sumatoria de torques aplicados al eje del motor, exceptuan-. v. do a l torque o voltaje de fricción.. HTorques. v. está expresado en unidades de voltaje;. esto se hace para simplificar el álgebra, y a que si consideramos a la sumatoria de torques expresada en newtons por metro (ETorques). E l valor de Y¡Torques. v. tenemos:. se puede derivar partiendo de l a Ecuación 2.20. Y si además. consideramos que en l a Ecuación 2.21 solamente aparece el término de. HTorques. v. cuando l a velocidad es cero tenemos: (2.22) C o n l a función indicada en l a Ecuación 2.21 se t r a t a de hacer una modelación de l a fricción de Coulomb lo más real y congruente posible, y a que hay que considerar los diferentes casos que se pueden presentar; por ejemplo, cuando el eje del motor está en reposo, si no se aplica ningún torque externo, l a fricción de Coulomb debe ser cero, pero si se empieza aplicar voltaje sin superar el umbral de voltaje (V ), u. l a fuerza de. fricción de Coulomb debe ser de igual magnitud pero de sentido contrario al torque provocado por el voltaje aplicado al motor, esto con el objeto de evitar el giro del motor y así coincidir con el funcionamiento real del motor.. Cuando l a velocidad de. giro del motor es cero, l a fricción de Coulomb se comporta como si fuera u n a fricción estática. 14.
(31) 2.3.2. Modelación del Carro y la Carga de la Grúa. E l objetivo ahora es obtener u n modelo del carro, el cable y l a carga de l a grúa. E s t a configuración se muestra en el esquema de l a F i g u r a 2.6. A continuación se presenta u n explicación de los diferentes términos presentados en este esquema:. F i g u r a 2.6: Esquema del carro, el cable y l a carga de l a grúa.. F(t). =. Fuerza aplicada al carro de l a grúa, en newtons ( N ) .. XM{Í). —. Posición del carro de l a grúa en el eje X , en metros (m).. a (t). =. Angulo desde l a vertical hasta el cable de l a carga, en radianes. r. (rad). Este ángulo es el mismo que a(t); l a diferencia estriba en que a (t) r. está expresado en radianes y a(t) está en grados. sexagesimales; es decir:. Coordenada sobre el eje X de l a carga, en metros (m). Coordenada sobre el eje Y de l a carga, en metros (m). Tensión en el cable de l a grúa, en newtons ( N ) . Fuerza normal ejercida por el carro sobre el riel, en newtons ( N ) . E s t a fuerza es l a ejercida por el peso del carro de l a grúa más l a tensión ejercida por el cable de l a grúa; por lo que tenemos que N{t) = Mg +. T{t)cos(a {t)) r. Fuerza correspondiente a l a fricción viscosa, en newtons ( N ) . 15.
(32) Fuerza correspondiente a l a fricción de C o u l o m b , en newtons (N). M a s a de l a carga, en kilogramos (Kg). M a s a del carro de l a grúa, en kilogramos ( K g ) . Longitud del cable de l a grúa, en metros (m). Las fricciones, viscosas y de Coulomb, se modelan por medio de los términos y Ff (t).. E l término Fj (t). c. Fj (t) v. sirve para modelar l a fuerza de fricción viscosa que ocurre. v. entre el carro y el riel por donde se desliza. E s t a fuerza es directamente proporcional a l a velocidad del carro de l a grúa por:. F/ (t) V. = f. v. (¿M(Í)). donde f. N(t) XM{t),. v. por l a fuerza normal (N(t)). y está dada. es una constante de proporcionalidad.. Esta. fricción se considera así debido a que experimentalmente se pudo comprobar que esta fricción aumentaba en forma directamente proporcional a l a velocidad del carro, pero además, había otro factor que influía de forma determinante siendo este factor l a fuerza n o r m a l ejercida por el carro contra el riel; es decir, a mayor fuerza entre el carro y el riel había mayor fricción. De los modelos matemáticos de l a grúa hechos en diferentes publicaciones solamente en [8] se t o m a en consideración un término parecido a éste, y a que en [8] consideran Ff (t). = f XM(t). C o n el término Fj (t). v. v. c. se modela l a fricción de. Coulomb; esta fuerza no es mas que una fricción constante debida a l a fuerza n o r m a l ejercida por el peso del carro y l a tensión del cable. E s t a conclusión se obtuvo en base a observaciones que se hicieron directamente en el prototipo y que posteriormente se comprobaron a l hacer l a identificación. Matemáticamente este término está representado por l a expresión: Ff (t) c. = f (t) c. N(t). donde f (t) c. es una función que depende del. l a velocidad del carro (¿M(¿))> de l a fuerza normal (N(t)) zas (YlFuerzas). y de l a sumatoria de fuer-. aplicadas al carro de l a grúa, con excepción del término de fuerza de. fricción de C o u l o m b . Experimentalmente se puede comprobar que al aplicar fuerza al carro de l a grúa, éste no se empieza a mover sino hasta que se alcanza cierto u m b r a l de fuerza; siendo este u m b r a l : Cf N(t), c. C o n esto, el término f (t) c. donde Cj. c. es una constante de proporcionalidad.. queda expresado por l a siguiente función:. Vale l a pena agregar que de l a bibliografía consultada, en ninguna publicación se tom a en consideración este término para hacer l a modelación matemática de l a grúa. Solamente en [4], en donde también disponen de u n prototipo a escala de u n a grúa, mencionan que debido a esta fricción se presenta una zona muerta, m i s m a que e v i t a n empleando u n a función no lineal en el voltaje aplicado al motor para compensar l a zona muerta, aunque en ningún momento modelan matemáticamente este efecto. 16.
(33) E l objetivo ahora es obtener el modelo matemático del sistema conformado por el carro, el cable y l a carga de l a grúa. Para obtener las ecuaciones dinámicas se utiliza l a Segunda Ley de Movimiento de Newton, es decir, se hace l a sumatoria de fuerzas en cada masa; las sumas de fuerzas deben ser igual a las masas multiplicadas por sus respectivas aceleraciones. Analizando primeramente l a masa del carro de l a grúa. (M),. como lo podemos ver en el esquema de la F i g u r a 2.6, tenemos: (2.24) P a r a poder describir las fricciones. Ff (t) v. y. Ff (t) c. es necesario saber l a fuerza que. ejerce el carro sobre el riel. E s t a fuerza es normal al carro y está descrita por: (2.25) P a r a modelar l a fricción viscosa tenemos: (2.26) y ahora sustituyendo l a Ecuación 2.25 en l a Ecuación 2.26 queda l a fuerza de fricción viscosa desglosada: (2.27) L a fricción de Coulomb l a modelamos como: (2.28) igualmente sustituyendo l a Ecuación 2.25 en l a Ecuación 2.28 tenemos a l a fuerza de fricción de Coulomb desglosada: (2.29) U n a vez definidas las fricciones, podemos sustituirlas en l a ecuación dinámica de l a masa del carro, es decir, sustituyendo las Ecuaciones 2.27 y 2.29 en l a Ecuación 2.24:. E s t a ecuación representa l a dinámica del carro de l a grúa; no obstante, todavía queda por definir l a tensión ( T ( i ) ) en el cable de l a grúa. P a r a esto es necesario hacer el análisis de fuerzas en l a masa de l a carga, pero antes se define l a posición de l a carga. Considerando el esquema de l a F i g u r a 2.6 tenemos que l a coordenada en el eje X de l a carga de l a grúa: (2.31) 17.
(34) y l a coordenada sobre el eje Y : (2.32) Haciendo ahora el análisis de fuerzas sobre l a masa de l a carga, en el eje X , tenemos: (2.33) repitiendo el análisis en forma respectiva para el eje Y : (2.34) P a r a obtener l a ecuación del péndulo despejamos l a tensión del cable (T(t)) de las Ecuaciones 2.33 y 2.34 para luego igualarlas y llegar a: (2.35) E n esta ecuación todavía queda por conocer las aceleraciones y ( í ) y x (t) m. m. por. lo que obtenemos l a doble derivada, con respecto a l tiempo, de las Ecuaciones 2.31 y 2.32 y las sustituimos en l a Ecuación 2.35. Simplificando algebraicamente el resultado llegamos a l a ecuación dinámica que describe al cable y carga de l a grúa:. (2.36) Observando l a Ecuación 2.30, que describe l a dinámica del carro, se puede ver que aparecen los términos T(t) s e n ( a ( í ) ) y T(t) c o s ( a ( í ) ) . Si despejamos estos términos de r. r. las Ecuaciones 2.33 y 2.34 y a su vez obtenemos l a doble derivada de las Ecuaciones 2.31 y 2.32 para sustituirlas en las ecuaciones anteriores: (2.37) y T(t) cos(or (í)) = mg + mLá {t) r. 2. r. cos(a (t)) r. + mLá (t) T. sen(a (í)) r. (2.38). Estos términos los podemos sustituir en l a Ecuación 2.30, con lo cual, llegamos a l a ecuación que describe l a dinámica del carro de l a grúa:. (2.39) 18.
(35) 2.3.3. Modelación del Sistema Completo. E n seguida el objetivo es unir las ecuaciones del motor, del carro y de l a carga de l a grúa para obtener las ecuaciones del sistema completo. Primeramente podemos unir l a ecuación del motor y l a ecuación del carro de l a grúa. Partiendo de l a Ecuación 2.20, que describe l a dinámica del motor, y que a continuación se reproduce:. (2.40). y observando el dibujo de l a grúa en l a F i g u r a 2.1, podemos apreciar que el carro está acoplado a l motor de c.d. por medio de una banda dentada, por lo tanto, podemos inferir que l a fuerza de carga. (.Fcarga(í)). del motor en l a Ecuación 2.40 es igual a l a. fuerza aplicada al carro de l a grúa (F(t)) en l a Ecuación 2.39:. (2.41). por lo tanto podemos despejar l a fuerza de carga (F (t)) carga. en l a Ecuación 2.40. y sustituirla en l a Ecuación 2.39 en lugar de F(t):. Las Ecuaciones 2.36 y 2.42 representan l a dinámica del sistema completo. Estas ecuaciones se pueden poner en notación matricial con el fin de poderlas apreciar y manejar de u n a mejor manera:. Desacoplando l a ecuación anterior, es decir, resolviendo el sistema anterior para las variables de aceleración, tenemos l a ecuación matricial que describe l a dinámica del sistema completo del prototipo a escala de l a grúa de techo: 19.
(36) (2.43) P o r último, hay que recordar que, con el fin de facilitar l a visualización de las variables de ángulo; estas magnitudes se presentarán en las gráficas en grados sexagesimales (°) utilizando l a relación:. 2.3.4. Modelación de las Fricciones de Coulomb. Finalmente queda por clarificar el funcionamiento de los términos que incluyen a l a fricción de Coulomb dentro del modelo matemático de l a grúa mostrado en l a E c u a ción 2.43. E n esta ecuación están presentes tanto los términos de fricción de C o u l o m b del motor. (vf(t)). como los del carro de l a grúa ( / ( í ) ) - Aquí y a no es t a n obvia l a forma c. de tratar estos términos, sobre todo cuando l a velocidad del carro de l a grúa es cero. E n cambio, cuando l a velocidad del carro es diferente de cero podemos seguir aplicando las Ecuaciones 2.21 y 2.23 que se presentaron con anterioridad para explicar el funcionamiento de las fricciones de Coulomb. Estas ecuaciones y a no se pueden aplicar directamente cuando l a velocidad del carro es cero, y a que ahora al estar acoplado el motor con el carro de l a grúa por medio de una banda, estas dos fricciones están interactuando; de modo que para poder analizar el funcionamiento de los términos de fricción cuando l a velocidad del carro de l a grúa es cero, debemos hacer un replanteamiento a partir de l a Ecuación 2.24 que se reproduce a continuación: (2.44) E s t a ecuación modela l a dinámica del carro de l a grúa. S i sustituimos las E c u a ciones 2.26 y 2.28 en l a Ecuación 2.44 podemos clarificar los términos de fricción: (2.45) 20.
(37) Considerando que se está haciendo un análisis para cuando l a velocidad del carro de l a grúa es cero, podemos simplificar l a Ecuación 2.45: (2.46) Si ahora recordamos l a Ecuación 2.20, que describe l a dinámica del motor, y despejamos l a fuerza de carga (F (t)) carga. tenemos: (2.47). De nuevo, como se ha considerado el caso cuando l a velocidad del carro de l a grúé es cero, podemos simplificar l a ecuación anterior: (2.48) F .rga(t) ca. en l a ecuación anterior es igual al término F(t). de l a Ecuación 2.46, y a. que el carro de l a grúa está acoplado al cabezal del motor de c.d. por medio de u n a banda dentada; por lo tanto podemos sustituir l a Ecuación 2.48 en l a Ecuación 2.46: (2.49) Si se hace el siguiente reacomodo de términos: (2.50) podemos ahora observar a las fuerzas aplicadas al carro, ubicadas en el lado i z quierdo de l a ecuación y las fuerzas de fricción del lado derecho; por lo tanto, podemos considerar que l a parte izquierda de la Ecuación 2.50 corresponde a l a sumatoria de fuerzas (TiFuerzas). presentada en l a Ecuación 2.23 con lo que tenemos: (2.51). y sustituyendo l a ecuación anterior en l a Ecuación 2.50 llegamos a: (2.52) Es importante recordar que esta ecuación solamente es válida cuando l a velocidad del carro de l a grúa es igual a cero. L a Ecuación 2.52 es m u y importante porque nos permite comprender l a forma en que se modelan las fricciones de Coulomb.. Antes. de continuar se recuerda el significado de los siguientes términos: V es el u m b r a l de u. voltaje a partir del cual el eje del motor empieza a girar y Cj N(t) c. es el u m b r a l de. fuerza, aplicada a l carro de l a grúa, a partir de l a cual el carro empieza a moverse. L a explicación detallada de estos términos se encuentra en secciones anteriores de este mismo capítulo. A continuación se presenta un desglose en base a casos de l a forma en que se piensan modelar los términos de fricción: 21.
(38) 1. Si l a velocidad del carro es mayor que cero. (¿AÍ(¿). >. 0):. 2. Si l a velocidad del carro es menor que cero (¿Af(í) < 0):. 3. Si l a velocidad del carro es igual a cero (¿Af(í) = 0), hay que observar si l a s u m a de fuerzas es positiva o negativa: (a) Si l a sumatoria de fuerzas es positiva o cero (LFuerzas. > 0), hay que. comprobar si esta suma es suficiente o no para vencer el umbral máximo de l a fuerza de fricción de Coulomb del motor: i . Si l a sumatoria de fuerzas es mayor que el u m b r a l máximo de l a fuerza de fricción de Coulomb del motor (EFuerzas. el siguiente paso es. >. comprobar si la sumatoria de fuerzas es suficiente para empezar a mover el carro: A . Si l a sumatoria de fuerza es mayor que l a suma de las dos fuerzas de fricción (HFuerzas. > ^ + Cf N(t)), c. tenemos:. B . Si l a sumatoria de fuerza es mayor que el u m b r a l máximo de l a fuerza de fricción de Coulomb del motor (EFuerzas. < ^ + Cf N(t)), L. c. pero. no es suficiente para mover el carro de la grúa:. i i . Si l a sumatoria de fuerzas es menor que el umbral máximo de l a fuerza de fricción de Coulomb del motor (T,Fuerzas. (b) S i l a sumatoria de fuerzas es negativa {^¡Fuerzas. <. ^):. < 0), hay que comprobar. si esta suma es suficiente o no para vencer el u m b r a l negativo de l a fuerza de fricción de Coulomb del motor: 22.
(39) Si l a sumatoria de fuerzas es menor que el umbral máximo de l a fuerza de fricción de Coulomb del motor (EFuerzas. < —7^), el siguiente paso. es comprobar si l a sumatoria de fuerzas es suficiente para empezar a mover el carro: A . Si l a sumatoria de fuerza es menor que l a suma de las dos fuerzas de fricción (EFuerzas. <. — Cf N(t)), c. tenemos:. B . Si l a sumatoria de fuerzas es menor que el u m b r a l negativo de l a fuerza de fricción de Coulomb del motor, pero no es suficiente para mover el carro de l a grúa (EFuerzas. > —^ —. Cf N(t)): c. i i . Si l a sumatoria de fuerzas es mayor que el u m b r a l negativo de l a fuerza de fricción de Coulomb del motor (EFuerzas. > —7^):. Este algoritmo para calcular l a fricción de Coulomb se programó en l a computadora para hacer las simulaciones del sistema. E n la identificación del sistema se comprobó l a veracidad de las suposiciones que se hicieron con el objetivo de modelar las fricciones. Finalmente, con esto ha quedado completa l a modelación del sistema. E n l a siguiente sección se muestra la identificación de las diferentes constantes propuestas en el modelo. 2.4. matemático.. Identificación del Sistema. U n a vez hecha l a modelación del sistema se procede a hacer l a identificación del prototipo a escala de l a grúa de techo. Por identificación del sistema se entiende que es l a estimación del valor de las constantes del modelo dinámico de l a grúa (Ecuación 2.43). Este modelo se desarrolló en l a sección anterior. E n este modelo se presentan nueve constantes, algunas de las cuales son más fáciles de identificar que otras; por ejemplo, l a masa de l a carga (m) se puede obtener directamente en u n a pesadora, en cambio, el coeficiente de fricción viscosa del carro ( / „ ) requiere de u n método de medición indirecto y por lo tanto más laborioso. E l proceso de identificación se dividió en dos etapas: primeramente se hizo una estimación aproximada del valor de cada constante y luego se 23.
(40) empleó u n proceso de optimización del modelo basado en un método de estimación por máxima verosimilitud. P a r a estimar en forma aproximada las constantes del modelo se emplearon varios métodos; desde l a medición directa de una magnitud física hasta la implementación de pruebas o experimentos con el fin de calcular el valor de alguna constante en forma indirecta; luego se hace una validación del modelo con el fin de verificar l a calidad de éste antes y después de haber sido optimizado. P a r a o p t i m i zar el modelo, se decidió utilizar un método de estimación por máxima verosimilitud implementado en el módulo de identificación de sistemas del paquete computacional M a t r i x X [2]. Este método requiere de estimaciones iniciales, y a que si el método parte con valores iniciales de cero o aleatorios lo más seguro es que proporcione estimaciones equivocadas atribuidas a algún mínimo local; fue por esto que primeramente se hizo la etapa de l a estimación aproximada de las constantes. Finalmente se hace u n a validación del modelo con el objeto se verificar l a calidad del modelo identificado y al mismo t i e m p o comparar la. calidad de éste con l a calidad del modelo antes de optimizar y así poder tener una conclusión acerca de l a importancia de l a etapa de optimización.. 2.4.1. Estimación Aproximada de las Constantes. A continuación se presenta l a estimación de cada una de las constantes presentes en el modelo matemático de l a grúa correspondiente a l a Ecuación 2.43: Identificación de las Masas del C a r r o ( M ) y la C a r g a (m) Estos son los parámetros más fáciles de estimar.. Se pesaron ambas masas en u n a. balanza de precisión y se obtuvieron las siguientes mediciones: • M a s a del carro de l a grúa: M = Q.371Kg • M a s a de l a carga de l a grúa: m = 0.56QKg Aquí cabe precisar que l a masa del carro y a no puede cambiar; no así l a masa de l a carga que se alterará con el objetivo de probar l a robustez de los controladores que se diseñen, pero cuando esto se haga, se indicará el cambio y su magnitud. Identificación del Voltaje de Fricción del M o t o r (u/(í)) C o m o se presenta en l a Ecuación 2.19, el voltaje de fricción (vf(t)). corresponde al. torque de fricción del motor multiplicado por una constante. E l torque de fricción es u n a función que modela las fricciones de Coulomb dentro del motor. E l voltaje de fricción se describe en l a Ecuación 2.21. E s t a función depende de u n solo parámetro que es V . E l parámetro V es el umbral de voltaje aplicado al motor a partir del cual u. u. el eje del m i s m o empieza a girar. P o r lo tanto para identificar V se puede hacer el u. 24.
(41) siguiente experimento: aumentar gradualmente el voltaje aplicado al motor, partiendo de cero voltios, y registrando el valor de voltaje en el momento en que empieza a girar el eje del motor. Este valor de voltaje corresponde a V . E l experimento se debe hacer u. con el motor solo, es decir, no debe estar acoplado al carro de l a grúa por medio de la banda. E l u m b r a l de voltaje también se puede obtener disminuyendo gradualmente de voltaje aplicado al motor, partiendo de cero voltios, y registrar el negativo del valor de voltaje en el instante en que empieza a girar el eje del motor. Se hicieron los dos experimentos, aumentando y disminuyendo el voltaje, y se obtuvo el mismo resultado:. Identificación de la Longitud del Cable de la Grúa P a r a estimar esta magnitud se mide con una regla l a longitud del cable. Se empieza a medir a partir de l a unión del cable con el carro de l a grúa y aquí es donde se presenta un problema: ¿en dónde terminar de medir?, y a que l a carga no es p u n t u a l y en este caso es irregular y tiene u n radio aproximado de 0.15m. Se podría intentar obtener el centro de masa de l a carga lo cual complicaría el problema. Se decidió medir hasta aproximadamente el centro geométrico de l a carga con lo que se obtuvo u n a medición de 0.75m. N o obstante para mejorar l a estimación se puede poner a oscilar el péndulo formado por l a carga y cable de la grúa, y a que de acuerdo a [9] si se tiene u n a condición inicial de a m p l i t u d pequeña, entonces el periodo de oscilación está dada por: (2.53) Se hizo el experimento de poner a oscilar el péndulo con una a m p l i t u d pequeña.. Los. resultados se muestran en l a Figura 2.7. E n esta figura se puede observar que se indicó, por medio de dos líneas verticales en los cruces por cero, u n periodo (T) completo de oscilación. E l primer cruce está en 0.6862 segundos y el segundo cruce está en 2.4357 segundos, por lo tanto T — 1.7494 segundos. S i ahora sustituimos este valor de T en l a Ecuación 2.53 y despejamos el valor de la longitud del cable (L) tenemos: • L o n g i t u d del cable de l a grúa: L = 0.759 m De modo que se comprueba l a primera medición y además se mejora l a estimación del parámetro. Identificación de co y c\ Utilizando Respuesta al Escalón del M o t o r P a r a identificar el valor de las constantes CQ y c\ se hace u n experimento de respuesta al escalón.. Primeramente se parte de l a Ecuación 2.20 que describe l a dinámica del. motor y que a continuación se reproduce: (2.54) 25.
(42) t(seg). F i g u r a 2.7: Oscilación de l a carga de l a grúa. E l experimento se hace con el motor solo, por lo tanto l a fuerza de carga. (F (t)) carga. es igual a cero: (2.55) L a prueba escalón consiste en aplicar un voltaje constante a l motor y observar l a respuesta en velocidad que éste presenta. E l voltaje que se aplique debe provocar u n torque superior al de l a fricción de Coulomb con el objeto de poder observar l a respuesta del motor; por lo tanto consultando l a definición de Vf(t) en l a Ecuación 2.21 podemos inferir que el valor del voltaje de fricción durante l a prueba escalón estará dado por: (2.56) Sustituyendo l a Ecuación 2.56 en l a Ecuación 2.55 y rearreglando los términos: (2.57) A l observar l a ecuación anterior se puede considerar a l a resta de términos como el voltaje aplicado al motor, por lo que podemos hacer el siguiente cambio de variable: (2.58) de aquí si sustituimos l a Ecuación 2.58 en l a Ecuación 2.57: (2.59) Si ahora aplicamos transformada de Laplace a l a ecuación anterior: (2.60) 26.
(43) reordenando los términos tenemos l a siguiente función de transferencia: X (s). (2.61). M. tenemos ahora un sistema lineal de primer orden con ganancia: (2.62) y constante de tiempo: (2.63) Por lo tanto si conocemos l a ganancia y l a constante de tiempo del sistema podemos conocer los valores de CQ y c\. Se procedió a hacer l a prueba de respuesta al escalón; las gráficas del voltaje de entrada y l a velocidad de salida se presentan en l a F i g u r a 2.8.. F i g u r a 2.8: Respuesta al escalón del motor de c.d. De acuerdo a [21], la constante de tiempo de u n sistema lineal de primer orden está dada por el tiempo que tarda l a respuesta del sistema en alcanzar el 63.2% de su respuesta en estado estable. Si se observa l a Figura 2.8 en l a gráfica de l a salida de velocidad se puede ver que la velocidad en estado estable es aproximadamente: 0.443 m / s . A esta velocidad en estado estable le llamaremos: ¿o- Luego se encuentra marcado el punto en que se llega al 63.2% de ¿ . Aquí, por medio de u n a proyección al 0. eje del tiempo, se puede observar que l a constante de tiempo ( r ) es de 0.024 segundos. m. También en l a F i g u r a 2.8 se presenta l a gráfica de voltaje (v(í)) aplicado a l motor que 27.
(44) básicamente es u n a constante de voltaje igual a 6 voltios. L a ganancia del sistema se calcula dividiendo l a velocidad de salida en estado estable x. 0. entre l a m a g n i t u d del. escalón de voltaje, pero como se hizo un cambio de variable entonces tenemos:. U n a vez que conocemos los valores de l a constante de tiempo y de l a ganancia del sistema los podemos sustituir en las Ecuaciones 2.62 y 2.63 para luego despejar los valores de CQ y c\. • Constante del Modelo de l a Grúa: co = 0.2866 • Constante del Modelo de l a Grúa: c\ = 11.9413 Identificación de c , f 2. v. y f (t) c. Utilizando Respuesta al Escalón del C a r r o. Por último se identifican los términos c , / „ y f (t)c. 2. Estos términos se identifican en. forma simultánea debido a l a interrelación que existe entre ellos. P a r a poder estimar el valor de las constantes se plantean dos experimentos. E n ambos experimentos se emplea el carro de l a grúa acoplado a l motor por medio de l a banda pero sin l a carga ni el cable de l a grúa; es decir, como se muestra en el esquema de l a F i g u r a 2.9.. F i g u r a 2.9: Configuración de l a grúa para identificar c , f 2. v. y. f (t)c. E n el primer experimento se aplicará voltaje en forma gradual al motor de l a grúa, partiendo de cero, y se registrará el valor de voltaje en el momento en que se empieza a mover el carro.. E n el segundo experimento se hará una prueba de respuesta de. velocidad del carro a l escalón de voltaje. A continuación se hace u n análisis del sistema mostrado en l a F i g u r a 2.9 con el fin de poder plantear l a estrategia de identificación de las constantes. Haciendo sumatoria de fuerzas igual a masa por aceleración en l a m a s a del carro tenemos: (2.64) Si en l a Ecuación 2.20, que corresponde al modelo del motor, despejamos l a fuerza de carga tenemos: (2.65) 28.
(45) en esta ecuación sabemos que la fuerza de carga aplicada al carro. (F(t)). (F. (t)). caTga. es igual a la fuerza. debido a que el carro está acoplado al cabezal del motor por. medio de una banda dentada. Por lo tanto si sustituimos l a Ecuación 2.65 y las E c u a ciones 2.26 y 2.28, que corresponden a los términos de fricción, en l a Ecuación 2.64: (2.66) C o m o en estos experimentos no está la carga de l a grúa, el término N(t) no es variable y está dado por: (2.67) Podemos simplificar los términos de fricción si vemos que en los dos experimentos se va a aplicar voltaje positivo y además como en el primer experimento se va a ver el punto en que empieza a moverse el carro y en el segundo experimento se va a aplicar un escalón de voltaje desde el inicio, entonces, consultando l a definición de los términos y fc(t). f(t). v. e. las Ecuaciones 2.21 y 2.23 tenemos:. n. (2.68) (2.69) A h o r a sustituyendo las Ecuaciones 2.67, 2.68 y 2.69 en l a Ecuación 2.66 tenemos: (2.70) E l primer experimento consiste en ir aumentando el voltaje aplicado al motor de la grúa en forma gradual, partiendo de cero voltios, y registrar el valor de voltaje en el momento en que empieza a moverse el carro de la grúa; a este voltaje le llamaremos V . P o r lo tanto podemos considerar que en ese momento límite tanto l a velocidad del c. carro. (¿M(¿)). c. o. m. o. s u. respectiva aceleración. (XM(Í)). s o n. cero, por lo que aplicando. estas consideraciones a l a Ecuación 2.70 tenemos: (2.71) Despejando de l a anterior ecuación el término C¡. c. de. y substituyéndole V en lugar c. v(t):. (2.72) Se llevó a cabo este experimento y se registró un voltaje de 1.6 voltios en el momento en que empezó a moverse el carro de l a grúa. De modo que V = 1.6V. C. L a Ecuación 2.72 se utilizará más adelante para poder despejar el valor de las constantes que se desean identificar. E l segundo experimento consiste en hacer una prueba de respuesta de velocidad del carro al escalón de voltaje; es decir, se aplicará un 29.
(46) voltaje constante al motor de l a grúa y se registrará l a respuesta transitoria de l a velocidad del carro de l a grúa ( ¿ A Í ( Í ) ) - Observando la Ecuación 2.70 podemos considerar a t o d a l a parte derecha de l a ecuación como el voltaje aplicado al sistema haciendo el siguiente cambio de variable: (2.73) Sustituyendo l a Ecuación 2.73 en l a Ecuación 2.70 tenemos: (2.74) A p l i c a n d o transformada de Laplace a la ecuación anterior: (2.75) y rearreglando los términos llegamos a l a siguiente función de transferencia lineal de primer orden: (2.76) donde l a ganancia del sistema es: (2.77) y l a constante de tiempo está dada por: (2.78) E n l a F i g u r a 2.10 podemos observar el resultado de l a prueba escalón.. E n la. gráfica superior se puede ver que se aplicó un voltaje al motor de siete voltios y en l a gráfica inferior se aprecia l a respuesta de l a velocidad del carro de l a grúa. A l igual que en l a estimación de CQ y c\ podemos estimar el valor de l a constante de tiempo del sistema si calculamos el tiempo que t a r d a l a respuesta de velocidad en alcanzar el 63.2% de l a respuesta en estado estable. E n la F i g u r a 2.10 podemos ver que l a respuesta de velocidad en estado estable es de 0.375 m / s ; a este valor le llamaremos ¿o-. E l 63.2% corresponde a 0.2371 m / s .. L a constante de tiempo está señalada por. medio de l a proyección sobre el eje del tiempo del punto en que l a velocidad del carro alcanza el 63.2% de l a respuesta en estado estable y es igual a 0.041 segundos.. La. ganancia del sistema está dada por l a respuesta de velocidad en estado estable (¿o) entre l a m a g n i t u d del escalón de voltaje de entrada; pero como se hizo u n cambio de variable en el voltaje aplicado a l motor tenemos: (2.79) 30.
(47) F i g u r a 2.10: Respuesta al escalón de voltaje del carro de l a grúa. A h o r a si sustituimos l a Ecuación 2.77 en l a Ecuación 2.78 y despejamos G : c. (2.80) Sustituyendo l a Ecuación 2.72 en l a Ecuación 2.79 y luego igualándola con l a Ecuación 2.80 tenemos: (2.81) Despejando c de l a ecuación anterior tenemos: 2. (2.82) C o m o podemos ver en l a ecuación anterior todas las constantes de l a parte derecha son conocidas. P o r lo tanto si sustituimos todos estos valores en l a Ecuación 2.82: (2.83) U n a vez que se calculó el valor de c podemos calcular el valor de C / . Esto se 2. c. hace si sustituimos el valor de c y demás constantes conocidas en l a Ecuación 2.72: 2. Finalmente si despejamos / „ de l a Ecuación 2.78 tenemos: (2.84) 31.
(48) y de aquí podemos calcular el valor de / „ sustituyendo el valor de las demás constantes conocidas con lo que llegamos a:. P o r último se presenta un resumen de l a estimación de l a magnitud de todas las constantes del modelo matemático del sistema:. 2.4.2. Obtención de Datos para Validar y Optimizar los M o delos. C o n el fin de poder avanzar en el análisis de l a identificación del sistema es necesario obtener datos experimentales que contengan información, de ser posible, de todas las dinámicas o modos del sistema. E n los textos de identificación de sistemas se sugieren algunas opciones.. U n a alternativa m u y común es hacer pruebas S B S A. 1. (Secuencia. B i n a r i a Seudo Aleatoria). Estas pruebas consisten en aplicar una secuencia de dos valores a l a entrada del sistema en forma alternada y con tiempos de duración aleatorios; no obstante, en [20] se indica que cuando se desea identificar u n sistema no lineal es recomendable utilizar señales de entrada que tengan más de dos niveles de m a g n i t u d ; y de alguna manera esto es lógico y a que al menos en nuestro caso, si deseamos tener datos que reflejen el comportamiento de las fricciones de Coulomb, debemos aplicar t o d a una gama de voltajes para visualizar los umbrales de fricción. Tomando en cuenta este aspecto se diseñó u n a prueba parecida a l a S B S A , pero en lugar de hacer el cambio de u n voltaje a l otro en forma inmediata, se decidió "barrer", durante u n tiempo aleatorio, el rango de voltaje entre los dos valores previamente escogidos. A estas pruebas les En. 1. inglés: " P R B S Pseudo Random Binary Sequence".. 32.
Figure


+7




Documento similar
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
entorno algoritmo.
We have created this abstract to give non-members access to the country and city rankings — by number of meetings in 2014 and by estimated total number of participants in 2014 —
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
