Análisis del comportamiento de mecanismos de control de acceso al medio en redes de sensores subacuáticas
54
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Telecomunicaciones y Electrónica. TRABAJO DE DIPLOMA Análisis del comportamiento de mecanismos de control de acceso al medio en redes de sensores subacuáticas Autor: Arian Cabrera Alvarez [email protected]. Tutor: Ing. Erik Ortiz Guerra [email protected]. Santa Clara 2010 "Año 52 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Telecomunicaciones y Electrónica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. El aspecto más triste de la vida actual es que la ciencia gana en conocimiento más rápidamente que la sociedad en sabiduría Isaac Asimov.
(5) ii. DEDICATORIA. A mi mamá que siempre me ha brindado su amor y su apoyo en cada momento de mi vida. A mi abuelo Abel que aunque no este presente hoy entre nosotros siempre me ayudo cuando estuvo y le hubiera gustado mucho poder apreciar este momento..
(6) iii. AGRADECIMIENTOS. A mi mamá que nunca me dejó de apoyar y siempre tuvo fe en mí. A mi abuela Dignora que siempre me ha dado hasta lo que no tenía. A mi abuelo Abel, que aunque no este entre nosotros, siempre me brindó su ayuda y su ejemplo para estudiar y llegar a ser un ingeniero como él. A mi papá y a mi mis abuelos Fermín y Clara que me apoyaron en cada momento. A mis amigos Oscar, Gustavo, Yusniel, Jorge y Lisbey que siempre brindaron su apoyo incondicional. A Erik que siempre estuvo dispuesto a ayudarme cada vez que lo necesité. A Melba que desde que llegó a mi vida me ha hecho muy feliz. A mi familia que siempre me ayudó y sin ellos no estaría aquí. A Yoanna, Yaily e Indira las mujeres mós lindas de la facultad. A todos mis compañeros de aula y a todos los que me conocen. A los profesores que siempre me apoyaron y me enseñaron cada día algo nuevo. A todas las personas que de una forma u otra han favorecido mi paso por la universidad..
(7) iv. TAREA TÉCNICA. Con la intención de darle cumplimiento a los objetivos trazados para la realización de esta tesis, se tuvo en cuenta una serie de tareas técnicas de suma importancia para la confección del informe, ellas fueron: •. Realizar una revisión bibliográfica acerca de los mecanismos de control de acceso al medio en redes de sensores subacuáticas.. •. Determinar los principales rasgos o características que poseen los mecanismos de control de acceso al medio en este tipo peculiar de redes.. •. Resumir los aspectos esenciales correspondientes al protocolo UWAN-MAC propuesto por Park y Rodoplu y los parámetros que pueden ser modificados para obtener un mejor desempeño de éste.. •. Implementar dicho protocolo en el lenguaje de programación Matlab, para realizar las simulaciones.. •. Comprobar, mediante simulación, el funcionamiento del protocolo implementado en las redes de sensores subacuáticas.. •. Estudio de posibles alternativas para la obtención de futuros resultados que puedan ser de interés.. •. Elaborar un informe final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. Las redes de sensores subacuáticas han encontrado un uso creciente en una amplia gama de aplicaciones como redes de muestreo oceánico, monitoreo medio ambiental, exploraciones submarinas, prevención de desastres, navegación asistida, vigilancia táctica distribuida y reconocimiento de minas. En las redes de sensores bajo el agua el problema de la comunicación se relaciona principalmente al control de acceso al medio, ruteo, y protocolos de transporte. En el presente trabajo se realiza una caracterización de los mecanismos de control de acceso al medio diseñados para estas redes de sensores, detallando sus principales componentes, sus deficiencias y sus ventajas. Se especifica de forma más detallada el protocolo UWANMAC, propuesto por Park y Rodoplu en (Park and Rodoplu 2007), que se implementa en las simulaciones, realizándose un análisis de los resultados obtenidos, midiendo diferentes parámetros, tales como la cantidad de paquetes por segundo que se transmiten, los paquetes que se reciben exitosamente y la fracción de energía desperdiciada debido a colisiones, donde se muestra el ahorro energético del protocolo, su buen rendimiento y su aceptable eficiencia del ancho de banda..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 4 CAPÍTULO 1.. PRINCIPALES RETOS EN LOS MECANISMOS DE CONTROL DE. ACCESO AL MEDIO EN REDES DE SENSORES SUBACUÁTICAS. ............................ 5 1.1. Introducción a las redes de sensores ........................................................................ 5. 1.1.1. Principales aplicaciones .................................................................................... 5. 1.1.2. Requerimientos característicos de las redes de sensores .................................. 7. 1.2. Introducción a las Redes de Sensores Subacuáticas ................................................ 8. 1.2.1. Comparación con las redes terrestres.............................................................. 10. 1.3. Redes de Sensores Acústicas Subacuáticas............................................................ 11. 1.4. Importancia de la capa de enlace MAC en las redes de sensores subacuáticas ..... 13. CAPÍTULO 2. MEDIO. PRINCIPALES MECANISMOS DE CONTROL DE ACCESO AL. DESARROLLADOS. PARA. REDES. DE. SENSORES. ACÚSTICAS. SUBACUÁTICAS ................................................................................................................ 15.
(10) vii 2.1. Evolución de los protocolos MAC desarrollados para las Redes de Sensores. Acústicas Subacuáticas ..................................................................................................... 15 2.2. Descripción general de un protocolo MAC eficiente energéticamente para redes de. sensores acústicas subacuáticas. ....................................................................................... 18 2.2.1. Idea Básica ...................................................................................................... 19. 2.2.2. Fase de inicialización ...................................................................................... 20. 2.2.3. Fase de transmisión de datos .......................................................................... 22. 2.2.4. Manejando recién llegados ............................................................................. 24. 2.2.5. Manejo de fallas de nodos y sincronización ................................................... 26. 2.2.6. Controlando variaciones en el canal ............................................................... 27. CAPÍTULO 3.. RESULTADOS Y DISCUSIÓN DE LAS SIMULACIONES ............... 29. 3.1. Software usado en las simulaciones. ...................................................................... 29. 3.2. Protocolo implementado en las simulaciones ........................................................ 30. 3.3. Entorno de Simulación ........................................................................................... 31. 3.4. Parámetros medidos en la simulación .................................................................... 32. 3.4.1. Rendimiento .................................................................................................... 32. 3.4.2. Eficiencia del Ancho de Banda ....................................................................... 33. 3.4.3. Eficiencia Energética ...................................................................................... 34. 3.5. Conclusiones del capítulo ...................................................................................... 37. CONCLUSIONES Y RECOMENDACIONES ................................................................... 38 Conclusiones ..................................................................................................................... 38 Recomendaciones ............................................................................................................. 39 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 40 ANEXOS .............................................................................................................................. 43 Anexo I. Problema del terminal oculto y el terminal expuesto ..................................... 43.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. Con el aumento y distribución a nivel mundial de las redes de telecomunicaciones, en especial las redes de sensores, cada día toman más importancia las distintas aplicaciones que brindan prestaciones específicas de valor agregado. Las redes de sensores son un sistema heterogéneo que combina diminutos sensores con elementos computacionales de objetivos generales. Estas redes pueden tener cientos o miles de nodos desplegados en masa, con la misma organización, baja potencia, bajo costo, con el objetivo de monitorear el medio. Si un nodo tiene facultades de sensado en combinación con habilidades de cómputo y comunicación, las redes de sensores se emplean en diferentes tipos de aplicaciones con distintos tipos de nodos, incluso dentro de una misma aplicación. Algunas de estas aplicaciones son, aplicaciones de auxilio y prevención de desastres, control medioambiental y trazado de biodiversidad, construcciones inteligentes, facilidad de dirección, vigilancia de maquinarias y mantenimiento preventivo, agricultura de precisión, medicina y cuidados de salud, logística, entre otras. Las aplicaciones anteriormente mencionadas comparten los requerimientos siguientes: tipo de servicio, calidad de servicio, tolerancia a fallos, tiempo de vida, escalabilidad, amplio rango de densidades, programabilidad y posibilidad de mantenimiento. Las redes de sensores subacuáticas son un área muy poco explorada. Compuestas de nodos de sensores cooperantes sumergidos bajo agua, con energía y capacidades de cómputo limitada, que pueden percibir el ambiente para supervisar los fenómenos físicos y eventos de interés, las redes de sensores subacuáticas han encontrado un uso creciente en una amplia gama de aplicaciones como redes de muestreo oceánico, monitoreo medio.
(12) INTRODUCCIÓN. 2. ambiental, exploraciones submarinas, prevención de desastres, navegación asistida, vigilancia táctica distribuida y reconocimiento de minas. Estas potenciales aplicaciones pueden hacerse viables estableciendo las comunicaciones entre los dispositivos subacuáticos. En comparación con el sensado remoto, las redes de sensores subacuáticas proporcionan un mejor sensado y tecnología de vigilancia para adquirir mejores datos para entender la complejidad espacial y temporal de ambientes submarinos. El diseño de estas redes emplea a menudo algunos acercamientos como las técnicas de eficiencia energética en procesamientos de red, comunicación multipunto, y técnicas de control de densidad para extender la vida de la red. Además, deben ser flexibles a las fallas, debido a diferentes razones, como la destrucción física de nodos o vaciamiento de energía. Varios desafíos todavía necesitan ser superados para tener un mayor despliegue ubicuo de las redes de sensores, tales como, una topología dinámica, heterogeneidad del dispositivo, la capacidad de energía, la calidad de servicio, el soporte de aplicaciones, calidad industrial y problemas ecológicos. Claramente, la comunicación eficaz entre unidades o nodos en redes de sensores bajo agua es uno de los problemas fundamentales y críticos en todo el diseño de sistemas de red. Las comunicaciones bajo agua coinciden con las comunicaciones inalámbricas terrestres en muchos sentidos lo que permite a las investigaciones, en el campo de las redes de sensores subacuáticas, usar muchos de los conceptos y teorías básicas desarrolladas hace más de 50 años en las redes inalámbricas terrestres. Sin embargo, muchas características únicas en el canal subacuático provocan que las redes de sensores subacuáticas difieran mucho de las redes de sensores terrestres, en muchos aspectos como el costo, despliegue, potencia, memoria, correlación espacial; estas diferencias nos permiten conocer las dificultades que poseen las redes de sensores subacuáticas y así mejorarlas para un mejor uso de éstas. Las redes de sensores subacuáticas mayormente se caracterizan por poseer equipos más costosos, mayor movilidad, escasos despliegues y diferente régimen energético cuando comparamos con las redes de sensores terrestres. Los sistemas de comunicación subacuática involucran la transmisión de información en forma de sonido, ondas electromagnéticas u ópticas. Cada una de estas técnicas tiene ventajas y limitaciones. La.
(13) INTRODUCCIÓN. 3. comunicación acústica es la técnica más versátil y ampliamente usada en los ambientes submarinos debido a la baja atenuación del sonido en el agua. Las ondas acústicas se propagan bien en el agua y pueden alcanzar grandes distancias, esa es la razón principal por la cual las ondas acústicas son ampliamente usadas en las comunicaciones subacuáticas. La baja velocidad de propagación acústica en el agua, en comparación con las ondas electromagnéticas y ópticas, es uno de los factores limitantes para la eficiencia de la comunicación y el trabajo de la red. En las redes de sensores bajo el agua el problema de la comunicación se relaciona principalmente al control de acceso al medio, ruteo, y protocolos de transporte. La capa de enlace o de control de acceso al medio (MAC) controla el acceso del nodo al medio de comunicación por medio de técnicas como acuerdos y división del tiempo. Básicamente, la capa MAC debe manejar los canales de comunicación disponibles para el nodo, para evitar colisiones y errores en la comunicación. La mayoría de las soluciones intentan proporcionar una fiable y eficiente solución. El control de acceso al medio en las redes de sensores subacuáticas propone desafíos adicionales debido a las peculiaridades del canal subacuático, en particular el ancho de banda limitado, y el retraso alto y variable. Objetivo General Este trabajo tiene como objetivo principal estudiar un mecanismo de control de acceso al medio y sus resultados en redes de sensores subacuáticas. Esto se logra siguiendo distintos objetivos específicos como, estudiar los principales retos que presentan los mecanismos de control de acceso al medio en redes de sensores submarinas, tales como el consumo energético y la eficiencia del ancho de banda. Analizar los principales mecanismos de control de acceso al medio utilizados en estos entornos. Determinar que parámetros deben ser tomados en consideración para probar el comportamiento de un mecanismo de control de acceso al medio. Determinar, mediante simulación, el comportamiento de los parámetros escogidos para ese mecanismo. Analizar los resultados obtenidos en las simulaciones y proponer sugerencias, teniendo en cuenta los parámetros más importantes..
(14) INTRODUCCIÓN. 4. Organización del informe Introducción: Se recogerán la importancia y necesidad de la realización de la investigación. Capítulo I: Descripción de los principales retos en los mecanismos de control de acceso el medio en estos entornos. Capítulo II: Descripción de los principales mecanismos de acceso al medio en estos entornos. Capítulo III: Análisis y comparación de los resultados obtenidos en las simulaciones. Conclusiones: Valoración de los resultados obtenidos y propuestas de trabajo futuro. Recomendaciones: Se hará teniendo en cuenta aquellos puntos que puedan enriquecer el trabajo, tomando en consideración los temas que no fueron descritos en la investigación por su extensión o por no ajustarse completamente a los objetivos planteados. Referencias bibliográficas: Se hará un listado de las referencias bibliográficas consultadas siguiendo las normas establecidas para ello. Anexos: Se incluirán aquellos temas que son de vital importancia para el trabajo y requieran ser tratados en el mismo aunque no estén directamente relacionados con el tema propuesto..
(15) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. CAPÍTULO 1. PRINCIPALES RETOS EN LOS MECANISMOS DE CONTROL DE ACCESO AL MEDIO EN REDES DE SENSORES SUBACUÁTICAS.. 1.1. Introducción a las redes de sensores. Las redes de sensores son un sistema heterogéneo que combina diminutos sensores con elementos computacionales de objetivos generales. Estas redes pueden tener cientos o miles de nodos desplegados en masa, con la misma organización, baja potencia, bajo costo, con el objetivo de monitorear el medio (Holger and Andreas 2005). 1.1.1. Principales aplicaciones. Partiendo de la base que un nodo tiene facultades de sensado en combinación con habilidades de cómputo y comunicación, las redes de sensores se emplean en diferentes tipos de aplicaciones con distintos tipos de nodos, incluso dentro de una misma aplicación. Algunas de estas aplicaciones se presentan a continuación (Holger and Andreas 2005). Aplicaciones de auxilio y prevención de desastres Uno de los tipos de aplicaciones más mencionados para las redes de sensores. Un escenario típico es la detección de incendios forestales, los nodos sensores están equipados con termómetros y pueden determinar su propia posición y alertar a los centros guardabosques. Control medio-ambiental y trazado de biodiversidad Las redes de sensores se pueden utilizar para controlar lugares como los vertederos de basura y chequear los contaminantes químicos que ahí se vierten; para mejorar los conocimientos del número de especies de plantas y animales que viven en un cierto hábitat..
(16) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. Construcciones inteligentes Las construcciones gastan vastas cantidades de energía por la ineficiente ventilación, humedad y el uso de aires acondicionados. Un mejor monitoreo, de amplia resolución y en tiempo real, de la temperatura, el flujo de aire, la humedad, y otros parámetros físicos, puede incrementar considerablemente el confort de los habitantes y disminuir el consumo energético. También estos sensores pueden ser utilizados para medir los niveles de estrés mecánicos en zonas activas sísmicamente. Facilidad de dirección Las redes de sensores pueden facilitar el control de seguridad de cualquier empresa censando las que personas pueden entrar en ciertos locales y así evitar la entrada de intrusos. Favoreciendo también el tránsito detectando vehículos que cometen infracciones. Vigilancia de maquinarias y mantenimiento preventivo Una idea es fijar sensores en ciertas áreas difíciles de las maquinarias donde estos puedan detectar patrones de vibración que indiquen la necesidad de mantenimiento. Agricultura de precisión La aplicación las redes de sensores a la agricultura permite precisar la irrigación y la fertilización colocando sensores de humedad en los campos. Medicina y cuidados de salud El uso de las redes de sensores en aplicaciones del cuidado de la salud es potencialmente beneficioso, pero éticamente controversial. Los rangos de posibilidades en cuidados intensivos, donde los sensores son colocados directamente en el paciente, que brinda la administración de los medicamentos automáticamente y disparar alarmas en caso que se le den al paciente equivocado. Logística En varias aplicaciones logísticas es concebible equipar paquetes de productos con sensores simples que permiten un seguimiento simple de estos objetos durante la transportación o facilita los inventarios en tiendas o almacenes. Ejemplo de ello es la tecnología de Identificación por Radio Frecuencia (Radio Frequency Identification, RFID). En adición las redes de sensores poseen muchos otros tipos de aplicaciones que se han mencionado en otros trabajos como juguetes que interactúan con niños, en las alas de los aviones, entre muchas otras..
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.1.2. 7. Requerimientos característicos de las redes de sensores. Los requerimientos siguientes son compartidos entre la mayoría de las aplicaciones anteriormente mencionadas (Holger and Andreas 2005): Tipo de servicio Las redes de sensores esperan proveer significativa cantidad de información y/o acciones acerca de una tarea dada. Calidad de servicio Estrechamente relacionada con el tipo de servicio de una red es la calidad de ese servicio. Tradicionalmente los requerimientos de calidad de servicio como limitada demora y ancho de banda mínimo son irrelevantes cuando la aplicación tolera la latencia o el ancho de banda de los datos transmitidos es muy pequeño; en algunos casos, solo la entrega ocasional de un paquete es más que suficiente, en otros casos, los requisitos de fiabilidad son muy altos. Tolerancia a fallos Puesto que los nodos pueden quedar sin energía o podrían dañarse, o puesto que la comunicación inalámbrica entre dos nodos puede estar interrumpida permanentemente, es importante que la red de sensores como un todo sea capaz de tolerar tales fallas. Para tolerar estos fallos es necesario un despliegue redundante, usando más nodos que los que serían estrictamente necesarios si todos los nodos funcionaran correctamente. Tiempo de vida En muchos escenarios, los nodos tendrán que contar con un suministro limitado de energía. Remplazar las fuentes de energía usualmente en estos campos no es práctico, y simultáneamente, una red de sensores debe operar al menos por un tiempo de misión dada o tanto como sea posible. Evidentemente, es necesario un método de operación eficiente energéticamente. Escalabilidad Debido a que las redes de sensores pueden incluir un gran número de nodos, las arquitecturas y protocolos empleados deben ser capaces de escalar a esos números. Amplio rango de densidades En las redes de sensores el número de nodos por unidad de área (la densidad de esta red) puede variar considerablemente de acuerdo al tipo de aplicación. Incluso con una aplicación dada la densidad puede variar en el tiempo y el espacio debido a fallas o movimientos de los nodos..
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. Programabilidad no solamente es necesario para los nodos procesar información, también deben reaccionar flexiblemente a los cambios en sus tareas. Estos nodos deben ser programables, y sus programaciones deben ser cambiables durante la operación cuando nuevas tareas se le imponen. Posibilidad de mantenimiento Así como cambia el medio y la red en sí, el sistema debe de adaptarse. Debe monitorear su estado y su salud para cambiar parámetros operacionales, en este sentido la red debería de auto-mantenerse. 1.2. Introducción a las Redes de Sensores Subacuáticas. Las Redes de Sensores Subacuáticas (Underwater Sensor Networks, UWSNs) son un área bastante inexplorada aunque se han experimentado las comunicaciones bajo agua desde la Segunda Guerra Mundial, cuando, en 1945, un teléfono subacuático se desarrolló en los Estados Unidos para comunicarse con los submarinos (Akyildiz, Pompili et al. 2005). En los últimos años han encontrado un incremento de su uso en un amplio rango de aplicaciones como (Akyildiz, Pompili et al. 2006): Redes de muestreo oceánico Estas redes de sensores pueden realizar muestreo cooperativo y adaptativo de los medio ambientes oceánicos y costeros. Monitoreo medio ambiental Pueden monitorear la contaminación (química, biológica y nuclear). Por ejemplo, puede ser posible detallar la papilla química de antibióticos, hormonas de tipo estrógeno e insecticidas para controlar arroyos, ríos, lagos y bahías del océano. El seguimiento de las corrientes oceánicas y los vientos, la previsión del tiempo atmosférico, detectar los cambios climáticos, comprender y predecir el efecto de las actividades humanas sobre los ecosistemas marinos, el control biológico como el seguimiento de los peces o los microorganismos, son otras posibles aplicaciones. Exploraciones submarinas Las redes de sensores subacuáticas pueden ayudar detectando yacimientos o depósitos petrolíferos, determinando la ruta de cableados submarinos y asistiendo en la exploración de minerales valiosos. Prevención de desastres Las redes de sensores que miden la actividad sísmica desde localizaciones remotas pueden proveer alarmas de tsunami a zonas costeras, o estudiar el efecto de terremotos submarinos (maremotos)..
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. Navegación asistida Los sensores pueden utilizarse para identificar los peligros en los fondos marinos, localizar rocas peligrosas o bancos de arena en aguas poco profundas, las posiciones de amarres, los restos de barcos sumergidos, y para realizar perfiles batimétricos1. Vigilancia táctica distribuida Los vehículos subacuáticos autónomos (autonomus underwater vehicles, AUVs) y sensores fijos pueden monitorear colaborativamente áreas para sistemas de vigilancia, reconocimiento, orientación y detección de intrusos. Con respecto al tradicional sistema radar/sonar, las redes de sensores subacuáticas pueden alcanzar alta precisión, y habilitar la detección y clasificación de blancos de baja medida combinando medidas de diferentes tipos de sensores. Reconocimiento de minas La operación simultánea de varios AUVs con sensores ópticos y acústicos puede ser usada para realizar rápidas evaluaciones y detectar objetos como minas. Estas potenciales aplicaciones pueden hacerse viables estableciendo las comunicaciones entre los dispositivos subacuáticos. Un diseño común de las redes de sensores subacuáticas, como se muestra en la Figura 1, incluye una boya flotante en la superficie oceánica actuando como un coordinador central. El uso de boyas provee las ventajas de las posibilidades que brinda la energía solar, acceso fácil para el mantenimiento y la colección de datos. Esta topología funciona bien para aplicaciones que requieran colección de datos desde puntos fijos, pero tiene un comportamiento limitado para aplicaciones distributivas, estas últimas se acomodan usando una topología distributiva, con nodos desplegados sobre un área de interés. El requerimiento de que todos los nodos se comuniquen con una boya central limita el tamaño de la red o requiere altas potencias de transmisión (Heidemann, Ye et al. 2006).. Proviene de la palabra batimetría, que no es más que la ciencia que mide las profundidades marinas para determinar la topografía del mar. 1.
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. Figura 1 Diseño común de una red de sensores subacuáticas. 1.2.1. Comparación con las redes terrestres. Las comunicaciones bajo agua coinciden con las comunicaciones inalámbricas terrestres en muchos sentidos. En ambas: las colisiones a menudo provocan pérdida de paquetes, pero no si la relación señal a ruido (SNR) permanece lo suficientemente alta; los dispositivos causan interferencias a largos rangos; la potencia de transmisión requerida crece con la distancia. Estas similitudes permiten a las investigaciones, en el campo de las redes de sensores subacuáticas, usar muchos de los conceptos y teorías básicas desarrolladas hace más de 50 años en las comunicaciones inalámbricas terrestres (Kurtis 2007). Sin embargo, muchas características únicas en el canal subacuático provocan que las redes de sensores subacuáticas difieran mucho de las redes de sensores terrestres, en muchos aspectos que se muestran a continuación (Akyildiz, Pompili et al. 2006): • Costo. Mientras que las redes de sensores se espera que sean cada vez mas baratas, los sensores subacuáticos son dispositivos caros. Esto se debe especialmente a la mayor complejidad de los transmisores subacuáticos y a la protección de hardware necesaria en el extremo ambiente subacuático. • Despliegue. Mientras que las redes terrestres de sensores están densamente desplegadas, bajo agua, el despliegue se considera que será escaso, debido al costo involucrado y a los retos asociados al despliegue en sí..
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. • Potencia. La potencia que necesitan las comunicaciones subacuáticas es mayor que en las radiocomunicaciones terrestres, debido a las largas distancias y el procesamiento de señal más complejo en los receptores para compensar los defectos del canal subacuático. • Memoria. Mientras que los nodos sensores terrestres tienen la capacidad de almacenamiento muy limitada, es posible que los sensores subacuáticos tengan que ser capaces de almacenar algunos datos en caché según el canal subacuático pueda ser intermitente. • Correlación espacial. Los lectores de los sensores terrestres a menudo se relacionan, esto es menos probable que suceda en redes de sensores subacuáticos debido a las largas distancias entre sensores. Estas diferencias nos permiten conocer las dificultades que poseen las redes de sensores subacuáticas y así mejorarlas para un mejor uso de éstas. 1.3. Redes de Sensores Acústicas Subacuáticas. Las redes de sensores subacuáticas mayormente se caracterizan por poseer equipos más costosos, mayor movilidad, escasos despliegues y diferente régimen energético cuando comparamos con las redes de sensores terrestres. Éstas mayormente usan la comunicación acústica, debido a que las ondas de radio sólo se propagan a largas distancias a través del agua de mar conductiva a frecuencias extra bajas (30-300 Hz), que requiere grandes antenas y alta potencia de transmisión. Por ejemplo, la Berkeley Mica 2 Motes, la plataforma experimental más popular en la comunidad de las redes de sensores, reportó tener un rango de transmisión de 120 cm bajo agua a 433 MHz por experimentos realizados en Robotic Embedded System Laboratory (RESL) en la Universidad de California del Sur, obteniéndose velocidades 1-8 kbps para rangos de 6 a 10 m. Las ondas ópticas no sufren de esa alta atenuación. pero son afectadas por espaciamiento. Además, la luz es. extremadamente absorbida bajo el agua pero con longitudes de onda entre el azul y el verde se puede usar en cortas distancias, estas comunicaciones ópticas bajo el agua son consideradas de bajo costo, conexiones de corto rango, del orden de 1-2 m, y razones de transmisión de 57.6 kbps (Partan, Kurose et al. 2006)..
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. Las ondas acústicas se propagan bien en el agua y pueden alcanzar grandes distancias, esa es la razón principal de porque las ondas acústicas son ampliamente usadas en las comunicaciones subacuáticas. Éstas son la típica tecnología de la capa física en las redes de sensores subacuáticas, para corto rango y un ancho de banda del orden de varios decimos de kHz y una eficiencia del ancho de banda en el orden de varios bits por segundo por Hz, pueden ser alcanzada una razón de transmisión por encima de los 100 Kbps. La velocidad del sonido bajo agua es de aproximadamente 1500 m/s, 2*105 veces menor que la velocidad de la luz, esto provoca largas demoras de propagación. Fluctuaciones de amplitud y fase conducen a una alta tasa de error de bit relativa a la mayoría de los canales de radio. La interferencia multicamino es común en las redes acústicas subacuáticas, causando selectividad de frecuencias en el canal. Estas interferencias dependientes de la frecuencia son generalmente variable en el tiempo debido a las ondas superficiales o movimientos de vehículos, causando desvanecimientos. En adición, el canal acústico tiene una fuerte atenuación con el incremento de la frecuencia provocando un ancho de banda muy limitado. Aunque los canales acústicos subacuáticos son variables en el tiempo, la demora de propagación se puede estimar, y es suficientemente estable para ser usada en parámetros de configuración de protocolos de red (Partan, Kurose et al. 2006). Las Redes de Sensores Acústicas Subacuáticas consisten en sensores y vehículos desplegados bajo agua y conectados en red vía enlaces acústicos para mejorar tareas colaborativas de monitoreo sobre un área dada. Para lograr este objetivo sensores y vehículos se organizan en una red autónoma la cual puede adaptarse a las características del ambiente oceánico (Akyildiz, Pompili et al. 2005). La Figura 2 muestra un ejemplo de un despliegue de una red de sensores acústica subacuática donde se presentan los enlaces acústicos que establecen los sensores con ellos mismos y con un nodo central que se encarga de transmitir toda la información al gateway en la superficie, el cual se comunica con las estaciones terrestres vía radioenlaces..
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 13. Figura 2 Ejemplo de una posible arquitectura de una red de sensores acústica subacuática. 1.4. Importancia de la capa de enlace MAC en las redes de sensores subacuáticas. Una característica esencial de las comunicaciones inalámbricas es que proporciona un medio inherentemente compartido. Todos los protocolos MAC para las redes de sensores dirigen el uso de la interface de comunicación para asegurar una eficiente utilización del ancho de banda compartido. Los protocolos MAC diseñados para las redes de sensores tienen otra meta importante de controlar la comunicación con el objetivo de ahorrar la energía. De esta manera, mientras que los protocolos MAC tradicionales deben balancear su desempeño, demora, y cuestiones de justicia, los protocolos MAC para las redes de sensores deben hacer énfasis en la eficiencia energética también (Bhaskar 2005). Recientemente ha habido una intensa investigación en protocolos MAC para redes ad hoc2 y redes de sensores inalámbricas terrestres. Sin embargo, debido a la naturaleza diferente del ambiente y las aplicaciones subacuáticas, existen varios inconvenientes con respecto a la conveniencia de las soluciones MAC existentes en los medios subacuáticos. En efecto, el control de acceso al canal posee retos adicionales debido a las peculiaridades del canal subacuático, en particular el ancho de banda limitado, la alta y variable demora de. una red ad hoc es aquella (especialmente inalámbrica) en la que no hay un nodo central, sino que todos los dispositivos están en igualdad de condiciones 2.
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. propagación, las asimetrías del canal, y grandes fenómenos de multicamino y desvanecimiento (Akyildiz, Pompili et al. 2006)..
(25) CAPÍTULO 2. MATERIALES Y METODOS. 15. CAPÍTULO 2. PRINCIPALES MECANISMOS DE CONTROL DE ACCESO AL MEDIO DESARROLLADOS PARA REDES DE SENSORES ACÚSTICAS SUBACUÁTICAS. El acceso al medio es un problema no resuelto en las redes de sensores acústicas subacuáticas, pero a sido estudiado por décadas en las redes de radio tradicionales, y ha recibido también una significativa atención en redes de sensores de radio. 2.1. Evolución de los protocolos MAC desarrollados para las Redes de Sensores Acústicas Subacuáticas. El canal subacuático tiene recursos muy limitados, estos escasos recursos deben compartirse de manera justa y eficaz por medio de los protocolos de acceso al medio. Por lo que se han desarrollado múltiples investigaciones para adaptar protocolos MAC para redes de sensores terrestres a estas peculiares redes de sensores bajo agua. La serie de experimentos de Seaweb, en (Rice, Creber et al. 2000), han sido los más costosos y los de más larga duración en las redes acústicas subacuáticas. Seaweb ’98 y ’99 usaron Acceso Múltiple por División de Frecuencia (FDMA) debido a limitaciones de módem. Pero con las limitaciones de ancho de banda y selectividad de frecuencia del canal subacuático, éste no era idóneo. Trabajos de Seaweb mas recientes han usado híbridos de Acceso Múltiple por División del Tiempo (TDMA) y Acceso Múltiple por Detección de Portadora (CDMA) con manejos RTS/CTS/DATA. El despliegue y la configuración toman más de un día, y opera durante muchos días, cubriendo regiones por encima de 100 km2..
(26) CAPÍTULO 2. MATERIALES Y METODOS. 16. El protocolo ALOHA original se basa en el acceso aleatorio al medio de los usuarios. Cuando un usuario tiene información para enviar, transmite inmediatamente, si el paquete se recibe sin errores por el receptor se le envía de vuelta un paquete de reconocimiento (ACK). Debido a las transmisiones arbitrarias, ocurren colisiones y se pierden paquetes. Si esto pasa, el receptor no emite un ACK, y, después aleatoriamente selecciona un tiempo, y los remitentes retransmiten sus paquetes. Puesto que los tiempos se seleccionan independiente y aleatoriamente, las probabilidades de colisiones son bajas. Estas retransmisiones provocan que el tiempo promedio requerido para transmitir exitosamente un paquete a través del canal sea más grande que el mínimo requerido para una simple transmisión de un paquete. La relación entre el tiempo útil (tiempo requerido para la transmisión de la información y el tiempo promedio total en el que el canal está ocupado en transmitir esta información define el rendimiento del esquema de acceso al medio. Con el método ALOHA simple, el máximo rendimiento alcanzado es 18% (Chirdchoo, Soh et al. 2007). Una versión mejorada del protocolo ALOHA, es el método ALOHA ranurado, propuesto por Roberts, en (Roberts 1975). En este método, el tiempo está dividido en ranuras, y el reloj local de cada nodo en la red se sincroniza de acuerdo a estas ranuras. Cuando un nodo quiere mandar un paquete, éste espera hasta la próxima ranura de tiempo y luego comienza la transmisión. La restricción de la transmisión de paquetes a ranuras de tiempo predeterminadas decrece el tiempo vulnerable en el que puede ocurrir una colisión. Con este método el rendimiento máximo alcanzado aumenta a un 36%. ALOHA se torna ineficiente en tráficos de ráfagas que ocurren en redes de información. También en el intento de evitar las colisiones retransmitiendo la información incrementa el consumo de energía de la red y reduce su tiempo de vida (Chirdchoo, Soh et al. 2007). L. Freitag, en (Freitag, Grund et al. 2005), describe una red para las operaciones de contramedidas de minas. Esta red es fácil de desplegar (cerca de una hora), y opera por varias horas sobre regiones del orden de 5 km2. Un gateway central provee control remoto de los. Autonomus Underwater Vehicles (AUVs) usando TDMA con baja razón de. transmisión (80 bits/s) para los comandos enviados a los AUVs y alta razón de transmisión (5 kbits/s) para los datos que retornan al operador a través del gateway..
(27) CAPÍTULO 2. MATERIALES Y METODOS. 17. Açar y Adams, en (Acar and Adams 2006), usan TDMA centralizado con razones de transmisión adaptativas y control de energía, reportando resultados de pruebas en mar, además proveen discusiones de protocolos MAC para redes subacuáticas. Un gran número de adaptaciones se han propuesto para adaptar MACA, MACAW y FAMA para las redes de sensores subacuáticas. En una pequeña parte de el artículo (Sozer, Stojanovic et al. 2000), se describe una simulación usando MACA con un comando WAIT añadido para reducir colisiones y mejorar la eficiencia energética. En redes subacuáticas de multi-salto, los terminales ocultos, ver anexo I, son comunes. MACA, en (Karn 1990), utiliza paquetes RTS/CTS/DATA para reducir el problema del terminal oculto. Cuando A quiere enviar un mensaje a B, primero emite un comando RTS que contiene la duración del mensaje que va a ser enviado. Si B recibe el RTS, éste manda de vuelta un comando CTS que también contiene la duración del mensaje. Tan pronto como A reciba el CTS, éste comienza la transmisión del paquete de datos. Cualquier nodo que escuche el CTS chequea su transmisión por la diferencia con la duración del paquete de datos para evitar colisiones. Este protocolo cuenta altamente con la simetría del canal, que es, que un CTS puede ser escuchado por todos los nodos dentro del rango del nodo receptor. Este protocolo puede ser usado como una base de un protocolo de acceso al medio en redes de sensores subacuáticas. Éste provee información de algoritmos de control de potencia y tiene la habilidad de evitar colisiones antes que éstas ocurran. MACAW, en (Bharghavan, Demers et al. 1994), añade un ACK, el cual puede ser muy útil para el poco fiable canal subacuático. FAMA, en (Fullmer and Garcia-Luna-Aceves 1995), extiende la duración de los paquetes RTS y CTS para prevenir colisiones con los paquetes de datos. La eficiencia de estos protocolos es severamente afectada por la demora de propagación. En los protocolos basados en CSMA (Carrier Sense Media Access, Acceso al Medio por Sensado de Portadora) los recursos del canal subacuático se utilizan mejor si el usuario escuchara el canal antes de transmitir un paquete. En (Molins and Stojanovic 2006), se propone un FAMA ranurado, añadiendo ranuras de tiempo a FAMA para limitar el impacto de la demora de propagación. Se combina el sensado de portadora y el diálogo entre la fuente y el receptor anterior a la transmisión de datos. Durante el diálogo inicial los paquetes de control se intercambian entre la fuente y el nodo de destino planeado para evitar múltiples transmisiones al mismo tiempo. Aunque las ranuras de tiempo eliminan la naturaleza asíncrona del protocolo y la.
(28) CAPÍTULO 2. MATERIALES Y METODOS. 18. necesidad de largos paquetes de control, así proporciona ahorro energético, se deben insertar tiempos de guarda en la ranura de tiempo para responder a cualquier desplazamiento del reloj del sistema. Además, debido a la alta demora de propagación de los canales acústicos, el mecanismo de control debe conducirnos a un bajo desempeño del sistema, y el sensado de portadora debe sensar el canal desocupado mientras una transmisión todavía se mantiene. Pero este protocolo no nos da una solución flexible para aplicaciones con requerimientos heterogéneos, debido a las bandas de guardas que hay que agregar para evitar las colisiones del lado del receptor. Kebkal, en (Kebkal, Kebkal et al. 2005), propone un medio para reducir el impacto de la demora de propagación en protocolos basados en FAMA y MACAW, con paquetes ACK y DATA enviados simultáneamente. Se sugiere también una extensión del FAMA, usando CDMA para los paquetes RTS, para desarrollar un protocolo FAMA libre de colisiones. CDMA es la técnica de acceso múltiple más prometedora para UW-ASNs. Es robusto a desvanecimientos de selección de frecuencia causados por multicamino, es capaz de distinguir entre señales transmitidas simultáneamente por múltiples dispositivos a través de códigos que cubren la señal del usuario sobre toda la banda disponible. CDMA incrementa el uso del canal y reduce la retransmisión de paquetes, que trae como resultado el decrecimiento del consumo energético e incrementa el desempeño (Pompili, Melodia et al. 2009). La eficiencia energética es también importante en las redes subacuáticas. En redes de sensores terrestres, la restricción energética ha llevado a diseñar protocolos MAC como SMAC. Park y Rodoplu, en (Park and Rodoplu 2007), adaptan estas ideas y otras, proponiendo UWAN-MAC, un protocolo MAC eficiente energéticamente para redes de sensores subacuáticas tolerantes a la demora de propagación. 2.2. Descripción general de un protocolo MAC eficiente energéticamente para redes de sensores acústicas subacuáticas.. Este protocolo MAC tiene como objetivo la eficiencia energética al operar bajo largas demora de propagación en aplicaciones de sensado y monitoreo de la ecología subacuática. Se concentra en una red de cientos de sensores con pequeño espaciamiento entre nodos (alrededor de 100 metros). Estas pequeñas distancias extienden la vida de la batería por el.
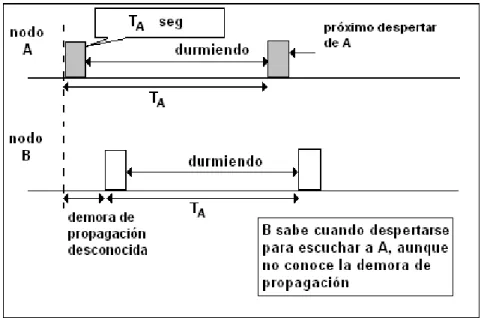
(29) CAPÍTULO 2. MATERIALES Y METODOS. 19. uso de bajas potencias de transmisión. Se supone la idea del modo durmiente o “sleep mode” para ahorrar la energía del nodo a través de cortos ciclos de servicios. Primeramente se asume que los nodos durante el período que duermen consumen menos energía que en el período de escucha. Consta de dos fases: Fase de inicialización: Fase donde los nodos consiguen la sincronización mediante el envío del paquete SYNC, en el cual está estampado el tiempo en el cual los nodos transmitirán sus datos. Fase de transmisión de datos: En esta fase luego de que los nodos están sincronizados, envían sus datos, manteniendo la sincronización mediante un encabezado de control que forma parte del paquete de datos y tiene dos partes: SYNC, donde se avisa si cambiará el tiempo en el que los nodos transmitirán de nuevo, y PERDIDOS, donde se colocan los nodos vecinos que no transmitieron en el momento que estaba programado. 2.2.1. Idea Básica. La idea básica, como se ilustra en la figura 3, consiste en que un nodo A transmite a un nodo B una señal de sincronismo donde viene estampado el período (T) de su ciclo de transmisión, B recibe el paquete de sincronismo, decodifica el período (T) de la señal y enlista al nodo A en su itinerario, así B conoce cuando despertarse para escuchar a A. De la misma forma B le envía la señal de sincronismo.. Figura 3 Idea básica del protocolo UWAN-MAC.
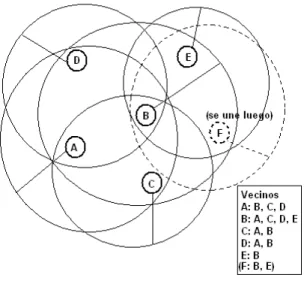
(30) CAPÍTULO 2. MATERIALES Y METODOS. 20. Determinación de los ciclos de “escucha”: primeramente el nodo A transmite un broadcast con el paquete de sincronismo SYNC al principio de su ciclo de transmisión, y luego va a dormir colocándose en un estado de ahorro de energía. Este paquete SYNC anuncia el período del ciclo de transmisión de A “TA”. Asumiendo que el nodo B está cerca del nodo A. Cuando el nodo B se une a la red escucha el canal para recibir este paquete SYNC y sincronizarse con el nodo A. Luego de sincronizarse con A el nodo B decodifica TA del mensaje. Esta explícita estampa de tiempo, permite al nodo B despertarse en el momento exacto en el próximo ciclo a escuchar al nodo A, sin ningún conocimiento de la demora de propagación, siempre que la demora de propagación permanezca fija de un ciclo al siguiente y el desplazamiento del reloj no sea significativo en un ciclo. En este protocolo las colisiones pueden ocurrir de dos formas: primero, una colisión “transmisión-recepción” puede ocurrir cuando un nodo está transmitiendo mientras que paquetes de otros nodos arriben a su receptor y colisionen con la propia transmisión del nodo. Segundo, una colisión “recepción-recepción” puede ocurrir si más de dos paquetes arriban a un nodo y se sobreponen en duración. Determinación del tiempo de inicio de la transmisión: el tiempo inicial de transmisión se selecciona aleatoriamente e independientemente de cada nodo. Sin embargo una vez que el nodo selecciona un cierto tiempo de inicio de la transmisión, lo añade a su itinerario transmitiendo sus datos en ese tiempo otra vez en el próximo ciclo. Puesto que los nodos tienen relojes que son desplazados aleatoriamente unos de otros, si el período del ciclo de transmisión es más largo que la duración de la transmisión, entonces la probabilidad de colisiones será pequeña. 2.2.2. Fase de inicialización. En la Figura 4 se muestra una configuración de una red de sensores acústica subacuática donde se enmarcan una serie de sensores los cuales el límite de su rango es una circunferencia alrededor de ellos, normalmente este rango no es una circunferencia y el protocolo no depende de la circularidad de estos rangos..
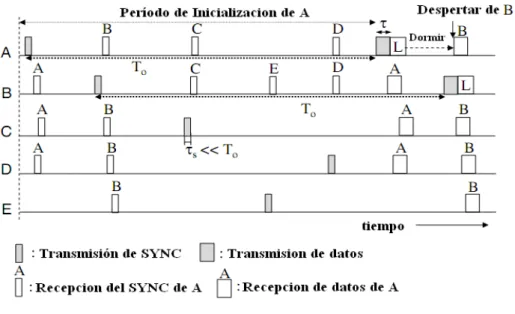
(31) CAPÍTULO 2. MATERIALES Y METODOS. 21. Figura 4 Un ejemplo de una configuración de una red UW-ASNs. Para esta configuración de red la transmisión de paquetes de control en el período de inicialización se ilustra en la figura 5. En el período de inicialización cada nodo transmite para todos los nodos vecinos su paquete SYNC, y permanece despierto hasta el inicio del próximo ciclo con el objetivo de recibir los paquetes SYNC de sus vecinos. El paquete SYNC contiene el período del ciclo de transmisión del nodo Ti el cual dice a sus vecinos que el nodo transmitirá datos nuevamente después de ese tiempo. El período del ciclo Ti es inicialmente fijado a un valor T0 para todos los nodos en orden de inicializar para ellos su itinerario transmisión/escucha..
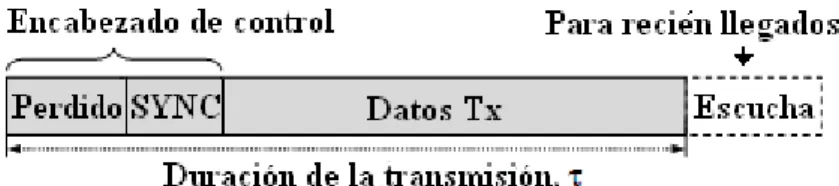
(32) CAPÍTULO 2. MATERIALES Y METODOS. 22. Figura 5 Esquema de transmisión de paquetes de control. Cada nodo selecciona su tiempo de comienzo de la transmisión aleatoriamente en el intervalo de [0, T0) y transmite su paquete SYNC a sus vecinos. Asumiendo que el tiempo de inicio de la transmisión ocurre primero, como se ilustra en la Figura 5, el nodo A transmite su paquete SYNC primero. Luego, los vecinos de A (B, C y D), reciben el paquete SYNC de A durante la inicialización lo cual les permite programar sus tiempos de despertar, que tomarán lugar después del período de inicialización. El nodo A también programará particulares tiempos de despertar para sus vecinos B, C y D después que escuche sus itinerarios durante el período de inicialización. Notar que el ciclo de servicio, llamado como la relación entre la duración de la transmisión τ y el período T0, es en efecto muy pequeño, por lo que los paquetes en esta figura no están dibujados a escala. Cada nodo realiza la inicialización periódicamente. 2.2.3. Fase de transmisión de datos. Después que la fase de inicialización está completa, cada nodo conoce cuando necesita despertarse otra vez para recibir datos de sus vecinos. Después de la inicialización los nodos siguen su itinerario establecido y comienzan a enviar datos. La figura 6 muestra la estructura de la transmisión del paquete de datos y el período de escucha para escuchar recién llegados potenciales durante la fase de transmisión de datos, la duración de la transmisión está sombreada y le sigue la duración de la escucha. La duración de la.
(33) CAPÍTULO 2. MATERIALES Y METODOS. 23. transmisión tiene tres partes distintas: “Perdido”, “SYNC” y “Datos Tx”. Los “Datos Tx” corresponden a la parte donde los datos actuales serán enviados. En este protocolo cada nodo i compara la lista de vecinos con la lista de nodos de donde el nodo i está recibiendo señales exitosamente. Luego de esta comparación, el nodo i genera la “lista de nodos perdidos” y la envía en el encabezado “Perdido” del paquete de datos en el próximo ciclo.. Figura 6 Estructura del paquete de datos. Durante la operación regular de la red, cada nodo mantiene el envío del período del ciclo de transmisión en el encabezado SYNC del paquete de datos, el cual puede ser distinto del primero (T0 segundos) en el período de inicialización. El uso del mensaje SYNC en el encabezado, un nodo tiene la opción de cambiar su período de ciclo actual, y sus vecinos pueden decodificar mensaje SYNC modificado y cambiar sus tiempos de despertar para ese nodo. La figura 7 muestra esta modificación del período de ciclo durante la fase de transmisión de datos. En esta figura, el nodo A cambia su próximo período de ciclo de T0 a TA, y el nodo B decodifica el mensaje SYNC modificado y se despierta para escuchar al nodo A después del nuevo período de ciclo TA. Si el nodo B pierde el contacto con el nodo A durante esa modificación, el recupera al nodo A como vecino a través la lista de vecinos “Perdidos”.. Figura 7 Modificación del período del ciclo durante la fase de transmisión de datos.
(34) CAPÍTULO 2. MATERIALES Y METODOS. 24. Después de la transmisión de datos, un nodo no va a dormir pero sí entra en un modo inactivo de escucha. En el modo de escucha, el nodo permanece despierto pero opera a baja potencia. Si escucha algo entra en modo de recepción. Este tiempo de escucha adicional es usado para escuchar recién llegados y mejora la robustez. 2.2.4. Manejando recién llegados. Como se muestra en la topología de la figura 4, el nodo F se une a la red y los nodos B y E se convierten en sus vecinos. La figura 8 nos ilustra como ocurre la transmisión de paquetes en este escenario. Luego de que el nodo F se une a la red, siempre que éste escuche otro nodo, envía un paquete HELLO de vuelta a su vecino para informarle al vecino su itinerario de transmisión. Para el tiempo de transmisión de su paquete HELLO, el nodo selecciona su ranura de tiempo para la transmisión uniformemente entre M ranuras de tiempo, donde M es el número de ranuras de tiempo y una ranura se demora la duración de un paquete HELLO. Esta selección aleatoria de la transmisión del paquete HELLO entre múltiples M ranuras de tiempo evita las posibles colisiones de paquetes HELLO de otros recién llegados, en caso de que un nodo tenga muchos recién llegados que se unan a la red de forma simultánea. De aquí a que, la duración del período de escucha se elige como M veces la duración del paquete HELLO más la máxima demora de propagación internodo..
(35) CAPÍTULO 2. MATERIALES Y METODOS. 25. Figura 8 Un nuevo nodo (F) se une a la red. En la figura 8, puesto que el nodo F parece recibir datos de B primero, selecciona su tiempo de transmisión del paquete HELLO entre estos M tiempos, aleatoriamente, cuando la recepción de datos se complete, y transmite un paquete de HELLO de vuelta al nodo B. Este paquete HELLO de F contiene una estampa de tiempo ΔB, el cual se define como el número de segundos (de acuerdo al reloj de F) desde el inicio del paquete HELLO al inicio del paquete SYNC programado para el nodo F. Este mecanismo permite al nodo B despertarse con el objetivo de escuchar al nodo F exactamente ΔB segundos despues de recibir el paquete HELLO de F. luego, a este tiempo de transmisión seleccionado el nodo F transmite su paquete SYNC para llevar a cabo la inicialización con sus vecinos B y E. Cuando el nodo B decodifica el paquete SYNC de F, programa sus tiempos de despertarse con el objetivo de escuchar próximas transmisiones de F. en orden de reconocer la recepción exitosa de el paquete HELLO, el nodo B envía un ACK al nodo F en la próxima transmisión de datos de B, y el. nodo F asegura su sincronización con el nodo B. manteniendo el envío del paquete HELLO hasta la recepción del ACK del nodo..
(36) CAPÍTULO 2. MATERIALES Y METODOS. 2.2.5. 26. Manejo de fallas de nodos y sincronización. Un nodo puede no recibir datos en un tiempo de despertar programado de un remitente debido a malas condiciones del canal o fallas internas del nodo remitente. Siempre que el nodo receptor no escuche al nodo transmisor en el tiempo programado, el receptor pone al transmisor en su lista de nodos perdidos, como se explica en la sección 2.2.3. Como se muestra en la figura 9(a), asumiendo que los datos entregados del nodo i al nodo j fallaron en el ciclo tm del nodo i, el nodo j anunciará a través del encabezado Perdidos que no escuchó al nodo i. En caso de que la entrega del nodo i al nodo j falle debido a que el enlace se encuentre en un mal estado, el nodo i decodificará el encabezado Perdidos del nodo j, y descubrirá que su transmisión falló o perdió la sincronización con el nodo j. Luego el nodo i envía un paquete HELLO al nodo j, como si el nodo i fuera un nuevo vecino del nodo j. Puesto que el nodo j se encuentra en modo de escucha después de la transmisión de datos, oirá el paquete HELLO del nodo i, y reprogramará su tiempo de despertar en el próximo ciclo.. Figura 9 (a) Pérdida de sincronización, (b) falla del nodo.
(37) CAPÍTULO 2. MATERIALES Y METODOS. 27. En la figura 9(b), cuando el nodo i falla (e.g. se queda si energía), el nodo j coloca a i en la lista de nodos perdidos. Sin embargo, puesto que el nodo i no estará disponible en la red, el nodo j no será capaz de escuchar al nodo i en el ciclo tm+1. Entonces, el nodo j eliminará los tiempos de despertar para el nodo i de su itinerario, en el ciclo tm+2. En otras palabras, el nodo j eliminará al nodo i de su itinerario si no es capaz de recibir datos de éste durante dos ciclos continuos, con el objetivo de ahorrar energía. 2.2.6. Controlando variaciones en el canal. La demora de propagación en el medio subacuático no permanece fija, varía, debido a las fluctuaciones del canal causado por movimientos relativos del transmisor, el receptor, o significativo espaciamiento de superficie, y movimiento de plataforma. En orden de manejar esta demora de propagación variable, cada nodo coloca un tiempo de escucha τe para transmisiones de nodos vecinos que llegan temprano, y τl para transmisiones de nodos vecinos que llegan tarde. Por ejemplo en la figura 10 se muestra la duración del modo de escucha del nodo B para cualquier vecino A existente. El nodo B puede captar los datos de A, incluso cuando la demora de propagación entre ellos no sea la misma que el ciclo anterior. También se muestra en la figura como los datos de A llegan más temprano en el primer ciclo y en el segundo ciclo más tarde que el tiempo de despertar programado de B para A, el nodo B aún puede recibirlos.. Figura 10 Duración de la escucha colocada antes y después del tiempo de despertar programado. Explotando la información de la máxima demora de propagación, el protocolo posee un mecanismo para reducir las colisiones recepción-recepción, donde cada nodo i coloca una cierta “banda de guarda” antes y después de su transmisión. Esta guarda es seleccionada.
(38) CAPÍTULO 2. MATERIALES Y METODOS. 28. por cada nodo de una manera completamente localizada para reducir las colisiones. En la figura 11(a) se muestra un ejemplo de una colisión recepción-recepción, para evitar esta colisión, sí τ1 o τ2 son menores que un tiempo de guarda predefinido τg, entonces el nodo A o B re-seleccionan su tiempo de comienzo de la transmisión para satisfacer la condición de que la duración de su transmisión, τ, mas dos veces τg, no se sobreponga con ningún otro tiempo de despertar. La figura 11(b) sugiere una posible solución para el caso en que τ2 < τg < τ1. No ocurren colisiones debido a que el nodo B selecciona un nuevo comienzo de la transmisión. La elección más simple del tiempo de duración de la banda de guarda τg es dos veces la máxima demora de propagación, la cual puede ser la misma para todos los nodos.. Figura 11 Un escenario de una colisión recepción-recepción y una posible solución con la política de banda de guarda.
(39) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 29. CAPÍTULO 3. RESULTADOS Y DISCUSIÓN DE LAS SIMULACIONES. Antes de estandarizar los protocolos se necesita realizar ciertas simulaciones, experimentos y pruebas con el objetivo de verificar la efectividad de los mecanismos. Probar el comportamiento de una red en una serie de experimentos reales sería muy costoso, por tanto las simulaciones de forma virtual mediante simuladores específicos o programados en software serían vías más factibles, por lo que son una de las principales etapas de un estudio de cualquier tecnología. Permitiendo con esto encontrar las deficiencias y problemas en partes o en el sistema completo. 3.1. Software usado en las simulaciones.. Para la realización de las simulaciones diseñamos una función de eventos discretos en MATLAB, el cual es el nombre abreviado de “MATrix LABoratory” y es un programa para realizar cálculos numéricos con vectores y matrices. Como caso particular puede también trabajar con números escalares, tanto reales como complejos, con cadenas de caracteres y con otras estructuras de información más complejas. Una de las capacidades más atractivas es la de realizar una amplia variedad de gráficos en dos y tres dimensiones. MATLAB tiene también un lenguaje de programación propio y es un gran programa de cálculo técnico y científico. Para ciertas operaciones es muy rápido, cuando puede ejecutar sus funciones en código nativo con los tamaños más adecuados para aprovechar sus capacidades de vectorización. En otras aplicaciones resulta bastante más lento que el código equivalente desarrollado en C/C++ o Fortran. En cualquier caso, el lenguaje de programación de MATLAB siempre es una magnífica herramienta para desarrollar aplicaciones técnicas, fácil de utilizar y que, como ya se ha dicho, aumenta.
(40) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 30. significativamente la productividad de los programadores respecto a otros entornos de desarrollo. Actualmente, el simulador tiene las limitaciones siguientes, que pueden ser fácilmente eliminadas ampliando al simulador y añadiendo la funcionalidad deseada: • El entorno de simulación es full connected, se necesita implementar un área donde no todos los nodos se conecten unos con otros y así llevar más a la realidad las simulaciones. • Los nodos sólo pueden ser colocados en un ambiente de dos dimensiones. • El simulador no soporta movilidad de los nodos durante la simulación. • No es posible agregarle nodos nuevos a la red simulada durante la simulación. 3.2. Protocolo implementado en las simulaciones. El protocolo que se implementa en esta simulación es el UWAN-MAC un protocolo descrito en el capítulo anterior propuesto por Park y Rodoplu, en (Park and Rodoplu 2007), este protocolo es eficiente energéticamente y tolerante a la demora de propagación, puesto que en las características peculiares del ambiente subacuático el ahorro de energía es uno de los aspectos más importantes a ser tratados. Este protocolo posee dos fases: Sincronismo y Transmisión de Datos En los dos casos se trabaja con demora de propagación fija. La fase de sincronismo es la que más completa está en la implementación ya que cumple con todo lo especificado en cuanto a tiempos y generación de números aleatorios, pero en esta fase como los números aleatorios se generan independientes en cada uno de los nodos las probabilidades de colisiones son muy bajas, logrando esta sincronización, la fase de transmisión de datos promete también bajas probabilidades de colisión, también en esta fase se trabaja para evitar las colisiones despertando a los nodos un poco antes que lleguen los datos, aclarando que implementamos esta banda de guarda para hacer más real el protocolo para las pruebas de ahorro energético, también colocamos bandas de guarda antes y después de la transmisión para evitar las colisiones recepción-recepción..
(41) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 31. No se implementa el manejo de recién llegados, que se utiliza para que un nodo nuevo se una a la red y para el caso en que un nodo se interrumpa por un tiempo, y luego se una a la red mediante este mecanismo, ya que en las simulaciones esos dos casos no fueron tomados en cuenta. 3.3. Entorno de Simulación. Los parámetros de simulación son muchos, y es imposible realizar cada simulación con cada combinación posible de parámetros, por lo que se han fijado algunos. La tabla 3.1 muestra los parámetros que se han adoptado en todas las simulaciones. Tabla 3.1. Parámetros de diseño del sistema Parámetro. Símbolo. Valor. Velocidad de propagación*. pv. 1500 m/s. Razón de transmisión. txrate. 100 Kbps. Paquete SYNC. SYNC. 40 bits = 5 bytes. Paquete de datos. DATA. 160 bits = 20 bytes. *. La velocidad de propagación en estos entornos es muy variable, pero como se discutió en la sección anterior la velocidad de propagación se asume fija, a la velocidad característica en este entorno.. La distribución de los nodos en un área dada puede ser muy diferente según aplicaciones o diseño, pero en este caso, como se muestra en la figura 12, vamos a implementar una red full connected donde todos los nodos sean vecinos, es decir, cada nodo puede conectarse con cualquiera de los restantes que forman la red. Para lograr esto en la implementación definimos el área igual o menor que el rango de los nodos, y la distribución de los nodos en el área va a ser aleatoria..
(42) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 32. Figura 12 Distribución de los nodos en un área dada. Todas las simulaciones se corresponden con un segundo, es decir, se medirá el desempeño de los parámetros en un segundo de simulación. 3.4. Parámetros medidos en la simulación. Para medir el desempeño de este protocolo UWAN-MAC se escogieron diferentes parámetros que de cierta forman dieran una medida relativa de su comportamiento, entre los parámetros escogidos están: el rendimiento, la eficiencia del ancho de banda, y de forma importante el ahorro energético o eficiencia energética. En todos los casos: Se realizaron 50 pruebas consecutivas, de las cuales se obtuvo la media y mediante cálculos estadísticos los valores mínimos y máximos probables. Los gráficos mostrados representan el intervalo de valores entre los que se encuentra el parámetro medido con nivel de confianza del 95%. 3.4.1. Rendimiento. Rendimiento se define como la relación entre la cantidad de paquetes de datos transmitidos en la red y el tiempo que demora transmitir estos paquetes. Como el tiempo de simulación es un segundo los paquetes que se envían en la simulación coinciden con el rendimiento,.
(43) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 33. como se observa en la figura 13, el rendimiento debe aumentar con el número de nodos pero no infinitamente sino hasta un valor determinado, una asíntota, que el rendimiento no sobrepasa. Pues se deben enviar paquetes hasta que se cumpla el segundo de simulación, por tanto con un aumento muy grande del número de nodos solo se enviarán los paquetes que quepan dentro del segundo de simulación.. Figura 13 Rendimiento. 3.4.2. Eficiencia del Ancho de Banda. Eficiencia del Ancho de Banda Es la relación entre la cantidad de paquetes de datos recibidos por un nodo y la cantidad de paquetes de datos transmitidos totales. Como vemos en la figura 14 el comportamiento de la eficiencia del ancho de banda es una curva exponencial que tiende al valor “1” como asíntota, esto indica que la eficiencia que es un valor que debe estar en el rango de 0 a 1 se mantiene de forma bastante aceptable para este protocolo..
(44) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 34. Figura 14 Eficiencia de Ancho de Banda. En esta figura se muestra como el valor máximo sobrepasa el valor 1, esto ocurre porque los cálculos estadísticos utilizados para calcular los valores máximos y mínimos son vulnerables a la capacidad del protocolo, el valor máximo permisible en estos casos es 1. 3.4.3. Eficiencia Energética. En la mayoría de las redes de radio terrestres, la potencia requerida para la transmisión y recepción son aproximadamente iguales. En redes acústicas subacuáticas, la potencia de transmisión domina, y es aproximadamente 100 veces mayor que la potencia de recepción. Costos energéticos: Los protocolos MAC para redes de sensores bajo contribuyen de manera significativa con el ahorro de energía, a continuación se presentan algunas vías para controlar el problema del gasto energético. Colisiones Si dos nodos transmiten al mismo tiempo e interfieren sus transmisiones con la de cada uno, los paquetes se corrompen. Por tanto la energía usada durante la transmisión y recepción se desperdicia..
Figure


+7



Outline
Documento similar
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
6 Para la pervivencia de la tradición clásica y la mitología en la poesía machadiana, véase: Lasso de la Vega, José, “El mito clásico en la literatura española
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
